
Abstract
Exoskeletons have been considered as a method to mitigate Work-related Musculoskeletal Disorders (WMSDs) in industry. However, it is still unclear how they affect work performance and processes that have accuracy and precision requirements (e.g., drilling, riveting, welding). In this study, the effect of a passive shoulder exoskeleton on a drilling-fastening task performance (the flushness and tilt angle of the fastener) and user perceptions (discomfort, fatigue, and workload) was examined. Participants (n = 13) performed a drilling-fastening task with the exoskeleton present and absent. Results support that the exoskeleton did not influence the quality of the drilling task, perceived fatigue, or perceived workload. There were mixed results on perceived discomfort, with participants feeling less discomfort, similar discomfort, and greater discomfort based on the body location. This study provides added context for industry decision-making on using passive shoulder-support exoskeletons as a method to mitigate WMSDs.
Keywords
Objectives
Work-related Musculoskeletal Disorders (WMSDs) are a leading cause of workplace injuries and account for nearly 30% of incident occurrences in the workplace (U.S. Bureau of Labor Statistics, 2020). While eliminating a hazard is prioritized, it is not always feasible. Exoskeletons are being considered as a way to mitigate WMSDs risks (Golabchi et al., 2022). For example, shoulder exoskeletons are wearable structures that can provide physical support to off-load musculoskeletal forces. These systems aim to reduce the forces required by the upper extremity and can lead to reductions in muscle activity (e.g., Huysamen et al., 2018; Kim et al., 2018) and perceived discomfort. While passive upper body exoskeletons have the potential to reduce muscle activation, additional factors must be considered for these systems to be deployed in industry to reduce musculoskeletal injury risks. For example, one of the challenges is to understand how they affect work performance and processes that have accuracy and precision requirements (e.g., drilling, riveting, welding).
The objective of this study was to assess if a passive shoulder exoskeleton affected performance on a drilling-fastening task. Participants were recruited from a Boeing training facility and completed the study. Both task performance and user perceptions were collected. Performance was evaluated by measuring the flushness and tilt angle of the fastener of each drilled hole. User perceptions were recorded for discomfort, fatigue, and workload. We assessed the hypothesis that performance and perceptions would be affected by exoskeleton presence. The outcome of our study can support industry decision-making on using exoskeletons to mitigate WMSD risk by characterizing how a passive shoulder exoskeleton affects task-related performance.
Approach
Thirteen participants (12 male and 1 Non-binary, 35.15 ± 11.41 years, Mean ± SD), recruited from a manufacturing training facility, completed the study. All participants wore IMUs; however, these data are not analyzed in the present paper. For a subset of eight participants (7 male and 1 Non-binary, 29.50 ± 6.93 years), the drilled plate was collected and analyzed. Due to a miscommunication with the training facility, the first five plates were not saved for analysis.
Within the subset of eight participants, self-reported prior drilling experience of the participants ranged from 0 to 2 years (n = 4), 3 to 10 years (n = 2), and more than 10 years (n = 2). However, participants were at the training facility to learn specific task skills, including the drilling-fastening task used in this study. Therefore, while they have prior experience drilling, they were novices at this specific task.
The exoskeleton used in this study was the Paexo Shoulder (Ottobock, Duderstadt, Germany), which is a passive upper body shoulder-support exoskeleton. The exoskeleton supports the wearer in holding their arms at and above shoulder height by providing assistive torque to the user’s arms through transferring part of the arm weight to the hip belt using bungee-like cords, which can be tightened or loosened to provide a specific applied tension (Maurice et al., 2019). The exoskeleton was adjusted for the participant following the company guidelines and they practiced moving with the exoskeleton. The exoskeleton evaluated was designed to support users for overhead tasks when the arms are raised and was marketed for overhead tasks such as the drilling-fastening task of this study.
Before the task started, an aluminum plate was placed at a six foot height on a training rack and supplies of the task were placed on a nearby table and in a tool box on the floor next to the rack. The drilling-fastening task included: (1) Marking the aluminum plate with two specified hole locations; (2) Drilling holes per marked location using a pilot drill bit (0.1285″) followed by the required size drill bit (0.247″); (3) Countersinking the holes; (4) Installing a fastener in each hole; and (5) Cleaning the area. Participants 1 to 5 started with step (2), while Participants 6 to 13 completed all steps. During the tasks, participants performed the task by raising their arms to drill, countersink, and fasten. They would lower their arms to change drill bits, as well as to use a mop and handheld vacuum to clean the area. Additional actions were observed, including bending down to pick up a tool and communicating with training staff. These tasks were completed with the exoskeleton present and absent (order randomized across participants). The two conditions were collected on the same day and the duration of the task varied based on the participant (10.93 ± 4.28 min, Mean ± SD). After each condition, participants completed a survey with the perceived workload component scores from the NASA Task Load Index, as well as a discomfort and fatigue score for the neck, shoulder, upper arm, forearm, upper back, low back, and hand.
Outcome performance was assessed by measuring the fastener flushness and tilt for the subset of eight participants. The difference in these metrics due to condition (Exoskeleton Present/Absent) was assessed using two methods: paired t-test to assess the value magnitudes and exact binomial test to assess the accuracy based on specified thresholds. The survey results were assessed through paired Wilcoxon signed rank test.
Findings
The exoskeleton did not significantly influence the drilling performance with respect to fastener height. The average max flushness height with the exoskeleton present (0.0182 ± 0.0115″ M ± SD) was not significantly different from the height when the exoskeleton was absent (0.0186 ± 0.0094″) (t(7) = −0.332, p = .750, d = 0.117) (Figure 1). The exact binomial test supported that the exoskeleton did not significantly change the proportion of acceptable max flushness heights (p = .2531, 95% CI on the proportion: [0.152, 0.646]).
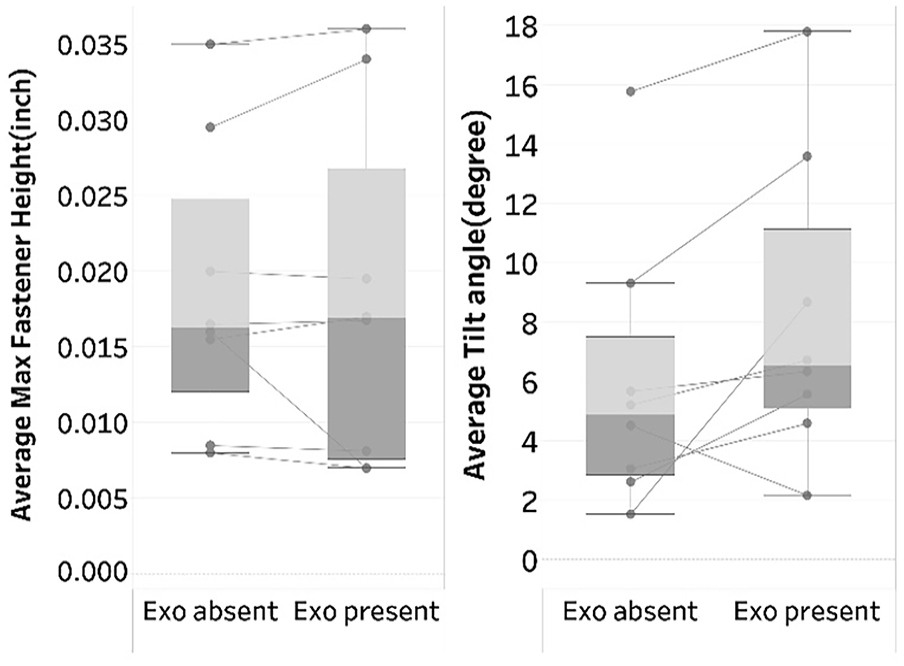
Box plots of the average fastener height and average tilt angle for the subset of eight participants. No significant differences were found between the exoskeleton absent and present conditions.
The exoskeleton did not significantly influence the drilling performance with respect to fastener tilt. The average tilt angle with the exoskeleton present (8.18 ± 5.11°) was not significantly different from the tilt angle when the exoskeleton was absent (5.96 ± 4.62°) (t(7) = 2.274, p = .057, d = 0.804). The exact binomial test supported that the exoskeleton did not significantly change the proportion of acceptable tilt angles (p = .248, 95% CI on the proportion: [0.000, 0.206]).
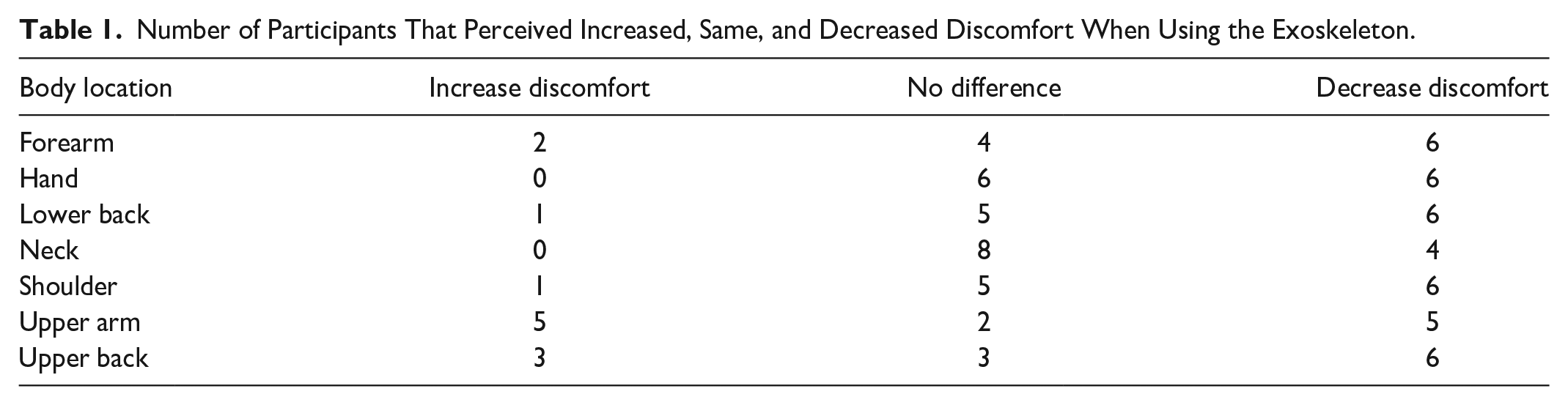
The survey results highlight mixed results for the perception of discomfort as some participants perceived no difference, some decreased discomfort, and other increased discomfort (Table 1, Figure 2). A statistically significant difference was only supported for the hand location (Exoskeleton Present 0.44 ± 0.72, Exoskeleton Absent 1.10 ± 1.55, on of 10-point scale) (Figure 2). The survey results support that exoskeleton presence did not affect fatigue (Exoskeleton Present 0.37 ± 0.59, Exoskeleton Absent 0.52 ± 0.64, on of 5-point scale) (Figure 3), or perceived workload scores across the body positions (e.g., Physical Demand with Exoskeleton Present: 7.38 ± 4.86, Exoskeleton Absent: 13.54 ± 11.81, on a 100-point scale) (Figure 4). Although perceptions of workload also had mixed results observed across the participants.
Number of Participants That Perceived Increased, Same, and Decreased Discomfort When Using the Exoskeleton.
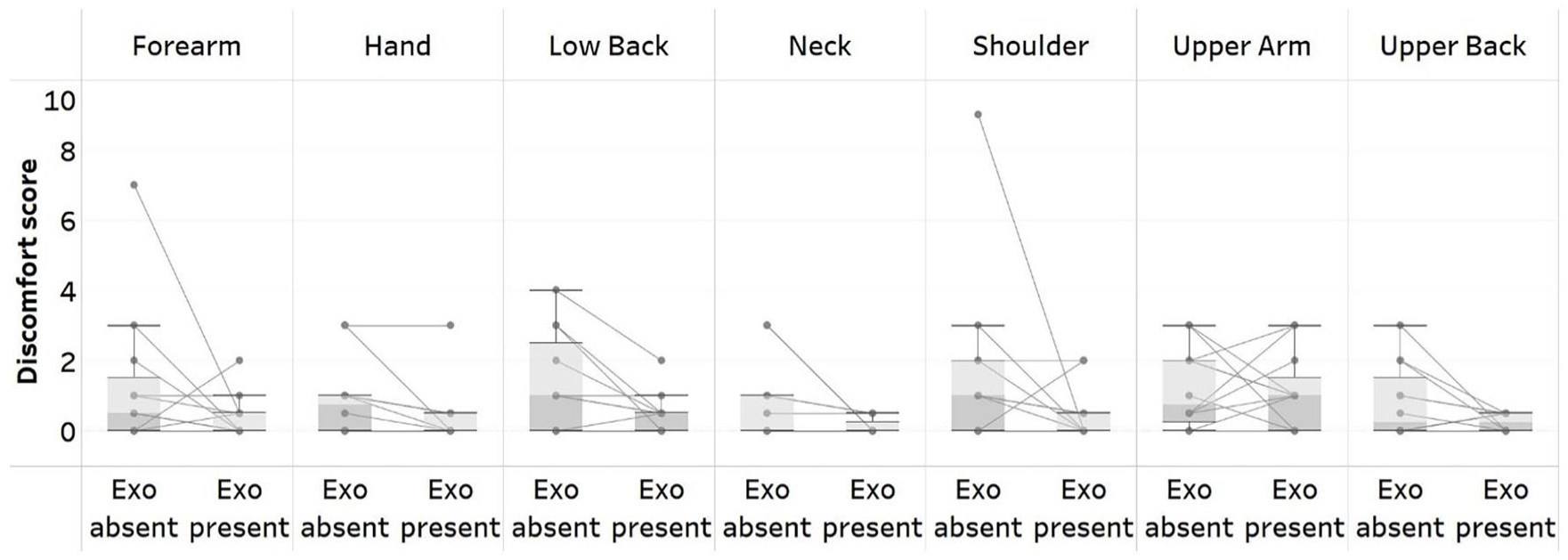
Box plots of the discomfort score (n = 12) with respect to Exoskeleton present/absent. One participant was removed from this plot as their open-ended responses imply that they may have misinterpreted the discomfort score anchors.
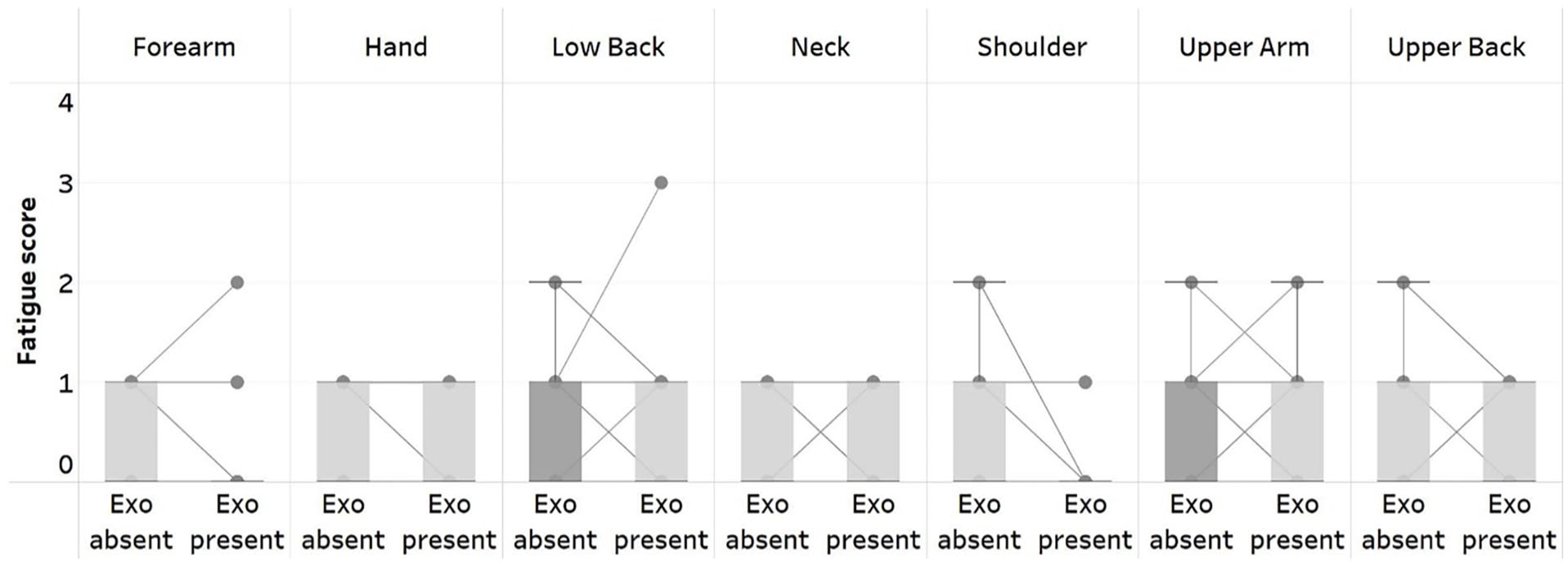
Box plots of the fatigue score (n = 13) with respect to Exoskeleton present/absent.
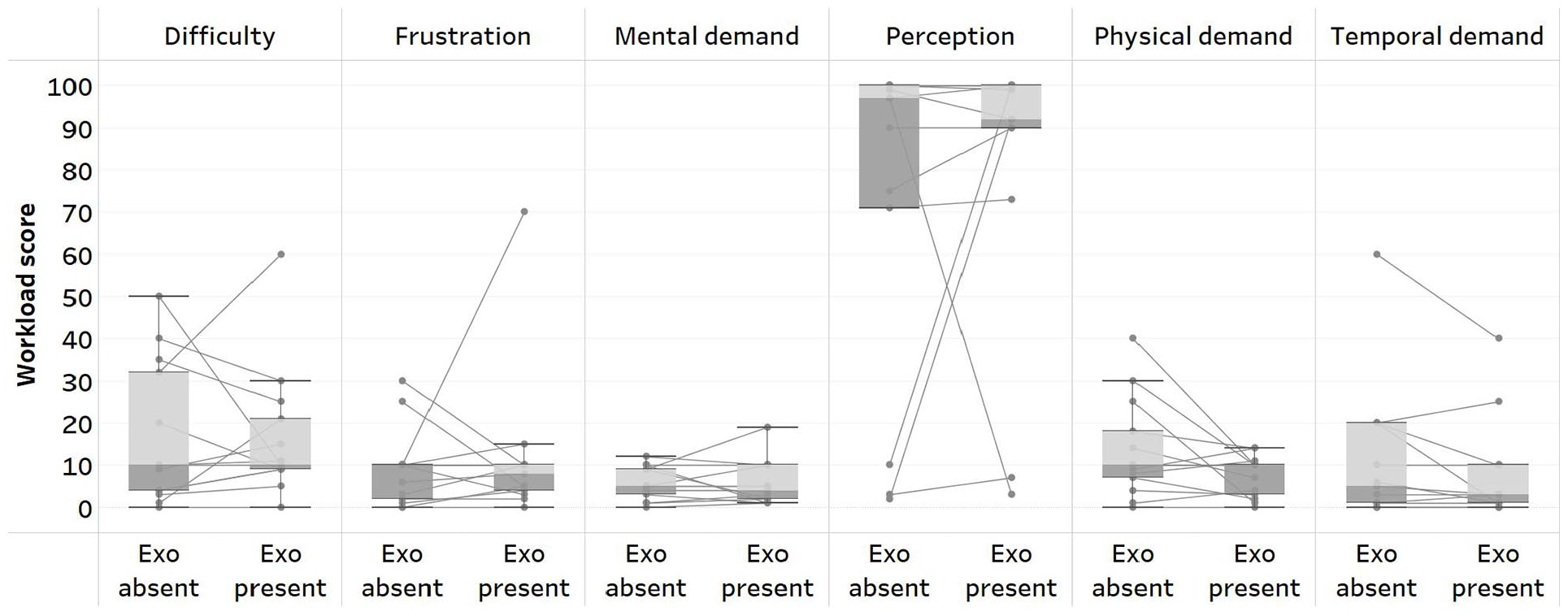
Box plots of the workload score (n = 13) with respect to Exoskeleton present/absent.
Takeaways
This study examined whether an exoskeleton affected an above-shoulder drilling-fastening task. These pilot study results are encouraging that this exoskeleton did not influence the quality of the drilling task. However, we did not observe a consistent perceived benefit through reduced discomfort scores as would be desired by these systems. There are a few reasons why these results may have been observed. First, there was not as much opportunity for benefit from this specific task for these workers based on the low scores with the exoskeleton absent. The duration of this study task was 10 min on average, which is short compared to manufacturing time on task. A longer study timeline may observe differences in the baseline perceptions when the exoskeleton is absent. Second, there are regions within the task where the exoskeleton would support and potentially hinder the worker. When participants’ arms are raised, they will receive support from the passive exoskeleton structure. Yet this same support force will hinder participants when they lower their arms. While the selected exoskeleton was designed for overhead tasks, the passive support is more appropriate for steady state postures where the arms remain overhead. However, in practice this “overhead task” is dynamic and requires elevating and lowering the shoulder. Therefore, the benefits and drawbacks of the exoskeleton may influence the observed perceptions. These findings suggest that exoskeletons for manufacturing tasks should accommodate the dynamic nature of support required when arms are raised and lowered.
It is also important to note that acceptable performance overall was low based on the acceptability thresholds. These results indicate that participants needed more training on this specific drilling-fastening task. In this pilot study, participants were recruited from a training facility, and not all participants were familiar with this specific drilling-fastening task. In addition, this study had a small sample limiting the effect size that could be significantly detected. Future studies should evaluate how the exoskeleton affects performance in a larger sample with participants with greater task-specific expertise. Future work of this study will analyze the posture data that was collected to characterize the dynamic nature of the task that was visually observed. This study provides added context for industry decision-making on using this shoulder-support exoskeleton as a method to mitigate WMSDs on a drilling-fastening task.
Footnotes
Acknowledgements
Any opinions, findings, conclusions, or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the Boeing Company. The authors would like to thank Jacqueline Hannan and Paul Pridham for their support in data collection and analysis.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Boeing Project Agreement UI-22-001.