
Abstract
This paper explores the development of a computer framework for electric harness routing considering design requirements and ergonomic assembly aspects simultaneously. It expands the current knowledge in this field by introducing methods for multidisciplinary analysis, allowing for the weighting of different criteria to create various solutions evaluated against multiple factors such as harness length, number of clipping points and ergonomic factors etc., utilizing Bayesian optimization. Two case studies are presented to demonstrate and evaluate the framework. The first case focuses on the evaluation of the multi-objective optimization, showing that the framework successfully generates several alternative design solutions and a wide variation of Pareto optimal solutions. In the second case the framework is brought out to the industry where four engineers use the framework for a real case. The work process and design results are compared with a test group which solves the same design problem but uses standard design tools. The evaluation highlights the framework’s potential to enhance the harness design process, with an estimated potential to reduce engineering time by 60%. The full code is available at https://github.com/wiberganton/autopack2.1.
Introduction
In response to the automotive industry’s accelerated shift towards electrification, the complexity and volume of electrical systems within vehicles have surged, notably increasing the demand for sophisticated electric harness routing solutions. Electrical cable routing is a complex task of finding the path of the electric harness through spaces within possible small passages. Figure 1 shows an example of a routing problem in a car engine room with many different parts that need to be routed around. When designing an electric harness like this many aspects need to be considered. In addition to just finding the shortest path the routing process also needs to consider where the harness can be fastened to the chassis (in so called clipping points), if it is possible to reach these clipping points and if the ergonomic position while reaching them is sufficient, make sure the harness avoids sharp edges or hot parts as well as minimizing the overall cable volume. By taking ergonomics into consideration early in the design process the goal is to reduce the number of iterations in the design which today include several different organizational units and therefore take a considerable amount of time. This paper presents a method for incorporating these multidisciplinary aspects into a design optimization framework, incorporate the framework into an open-source python library, and evaluates the developed framework on two different cases where one is in an industrial setting. Traditional methods of harness routing in vehicles often rely on manual processes, which are not only time-consuming but also prone to errors. With the increasing complexity of vehicle electrical systems, there is a pressing need for automated and optimized routing solutions. Several methods based on path planning algorithms have been developed over the years. Harness routing, however, is a multidisciplinary challenge that extends beyond simply identifying the shortest route. It encompasses a variety of critical factors, such as the optimal placement of clipping points (where the harness is fastened to the car body), the strategic avoidance of hot and sharp components within the vehicle, and considerations for manufacturability and ease of assembly, all while minimizing both the total cable length (the sum of all individual cables in the harness) and the harness length (the overall routing length, with parallel cables counted only once). This complexity necessitates a comprehensive approach that integrates knowledge from multiple engineering disciplines to ensure both the functionality and manufacturability of automotive electrical systems. Example of harness routing in a motor room where two pumps are connected to a control box with electrical wires. The routing faces several challenges such as finding suitable positions for clipping, making sure that the clip positions are reachable, and this while minimizing harness length and cost.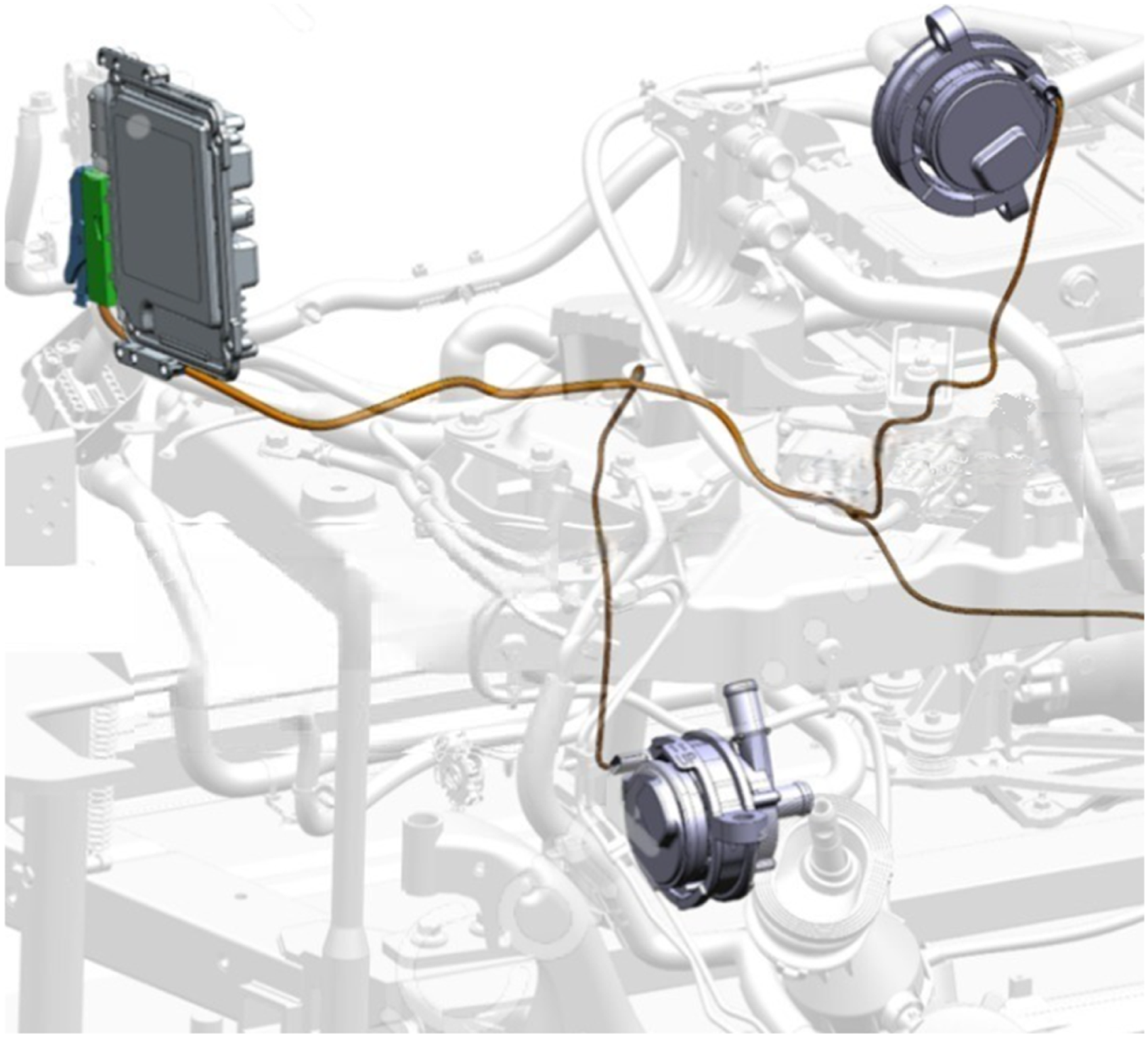
It has been shown how routing efficiency in terms of length and weight of cables can be combined with design constraints to fulfill safety standards and other geometrical constraints (Thomas et al., 2009). A popular way to perform the routing is by utilizing graph-based methods where the algorithms find the routing that minimizes length and avoids obstacles (Anjos and Liers, 2012). Karlsson et al. (2024) have used this approach combined with a smoothing step to create a framework which, in addition to finding the best path, can predict clipping positions and adapt to design rules such as minimum bending radiuses. Another trend in harness routing is multi-objective optimization where weight and length can be combined with cost minimization (Zhang et al., 2021b). Further studies show how electromagnetic and temperature factors can be incorporated into multi-objective harness optimization (Combettes et al., 2015; Rius et al., 2016; Zozaya-Gorostiza et al., 1994). Ergonomic factors have been incorporated in the cable harness design process by utilizing virtual reality where the feedback can be used to adjust the routings (Guo et al., 2022; Ritchie et al., 2007).
This work expands the current knowledge of harness routing by introducing a framework for multi-objective harness routing with the possibility to weigh different inputs to create various solutions evaluated against multiple factors. The framework builds on the algorithms by Karlsson et al. (2024) but adds functionality for handling multiple aspects of designs already in the optimization process by creating graph-based cost-fields for different design aspects. The framework then weighs the different cost-fields, thereby enabling harness optimization for different disciplines. Moreover, the framework implements a Bayesian optimization algorithm for global optimization where the weightings are varied, and the harness solutions created for the weightings are evaluated in terms of volume (weight), number of clips needed, geometrical feasibility, and assembly ergonomics. The framework comes with a GUI that allows users to explore the different solutions and compare the results to aid in decision-making.
The framework has been industrially evaluated through implementation in two cases. One case focus on the optimization while the other presents a full scale industry implementation. In this evaluation four engineers at a car construction company use the developed framework on a real case. The process and design results are captured and compared to a reference group which solved the same design problem using current software and technologies. The way the evaluation is done is inspired by the work by Gustafsson et al. (2021) in the way it handles industrial partners for evaluation.
The paper starts with an overview of related work, including current harness design approaches, ergonomic analysis, the application in harness routing, and an overview of Bayesian optimization. Following this is a section presenting the developed framework, which is then evaluated in the next section that contains a presentation of the two cases and their results. Finally, the work is concluded with discussion and conclusions.
Related work
Harness routing
Harness routing design and optimization are critical processes in industries such as automotive, aerospace, and electronics, where the complexity of wiring systems can significantly impact overall performance, cost, and reliability. Previous research has approached the problem of cable harness routing through a variety of methods. Masoudi and Fadel (2021) classified existing studies into two primary categories: design process tools and layout optimization methods. Design process tools include virtual and augmented reality environments for testing prototypes and knowledge-based or artificial intelligence approaches to aid designers in adhering to design rules (Masoudi and Fadel, 2021).
The traditional approach to harness routing involves manual or semi-automated methods, which can be labor-intensive and prone to human error. Recent developments have shifted towards more automated solutions leveraging computational techniques and optimization algorithms. These techniques aim to enhance routing efficiency, reduce costs, and ensure compliance with design constraints and safety standards. Automated harness routing typically involves algorithms that can handle the complexity of modern designs, considering factors such as spatial constraints, electrical requirements, and environmental conditions. For example, modern algorithms utilize graph-based methods, where the routing problem is modeled as a network of nodes and edges, representing components and possible paths, respectively. These methods can efficiently identify optimal routing paths that minimize length and avoid obstacles (Anjos and Liers, 2012).
Karlsson et al. (2024) address cable harness routing in various industrial applications such as automotive, aerospace, and telecommunications by presenting a method for 3D layout optimization. The method includes a grid graph described as a cost-field that guides the routing process. The cost-field is in this case a grid representation with 3D coordinates spread across the design geometry and represents nodes the harness can go through. Each point in the grid is assigned a cost (a positive number) where the cost for a harness is calculated by summarizing the costs of the nodes which the harness passes. In the method developed by Karlsson the cost for each node in the cost-filed is calculated by looking at geometrical distances to geometries added by the user. The user can create a customized environment and set up preferences for geometries in terms of whether the preferred routing should be near, neutral, or avoided where nodes close to near geometries get a low cost and nodes close to avoid geometries receive a high cost. Figure 2 demonstrates an example of a cost-field and the resulting harness routing (note that this example is in 2D for simplicity, but the method can handle 3D). The method developed by Karlsson first optimizes discrete solutions using the cost-field, then a smoothing step is implemented to transform the harness into smooth segments. During the smoothing, rules for maximum bending of harnesses, minimum and maximum branching distances, and clipping distance of the harness to a clippable geometry are considered. Example of a cost-field (a), a discrete harness solution (b), and a smoothed harness with distributed clips (c) based on the method presented by Karlsson et al. (2024).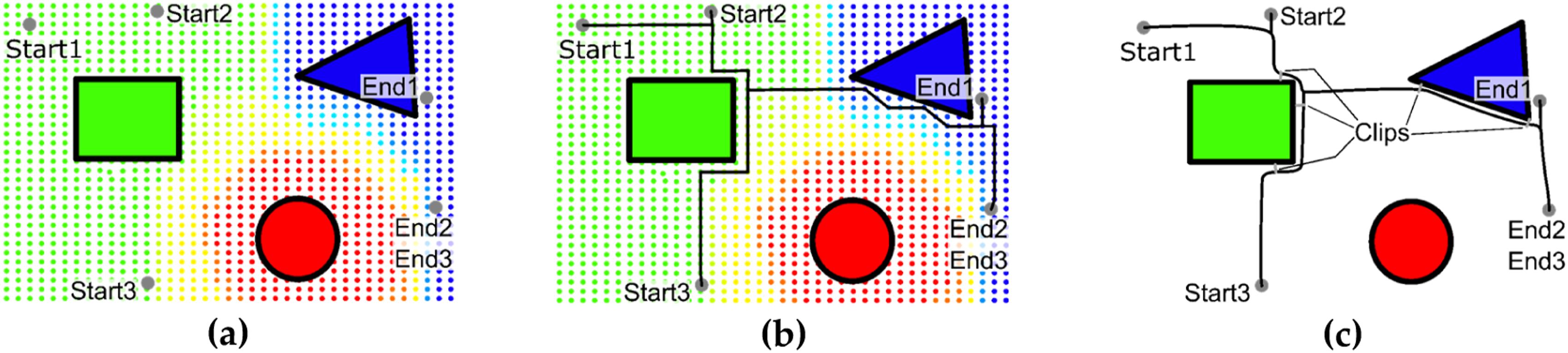
One of the significant trends in harness routing optimization is the use of multi-objective optimization techniques. Unlike single-objective optimization, which focuses on a single criterion, multi-objective optimization considers multiple, often conflicting objectives simultaneously. In harness routing, these objectives might include minimizing the total length of the wires, reducing the overall weight, minimizing electromagnetic interference, and ensuring ease of maintenance and repair (Zhang et al., 2021b).
Techniques such as Pareto optimization are commonly used in this context. The Pareto front represents a set of non-dominated solutions, each of which cannot be improved in one objective without worsening another. This approach allows designers to evaluate trade-offs and select solutions that best meet their specific requirements (Coello et al., 2007). A notable application of multi-objective optimization in harness routing can be found in the work of Zhang et al. (2021b), who developed a genetic algorithm-based method to optimize harness routing in automotive design. Their method considers multiple objectives, including the total wire length, weight, and bending radius, ensuring that the routing solution is not only optimal in terms of cost and efficiency but also robust and reliable (Zhang et al., 2021a). Additionally, recent advancements have incorporated techniques such as particle swarm optimization and ant colony optimization to address the complexities of harness routing. These methods have been shown to effectively balance the trade-offs between conflicting objectives, further enhancing the design process (Liu and Wang, 2012). By leveraging these advanced optimization techniques, designers can achieve more efficient and reliable harness routing solutions that meet the stringent requirements of modern industrial applications. Hemono et al. (2025) have looked into human robot collaboration to evaluated optimization of the assembly setup.
Ergonomic evaluation
In this case ergonomics focuses on optimizing human well-being for the workforce assembling the electrical harnesses within a given product environment (such as a car chassis). Contemporary ergonomic evaluations leverage a multidisciplinary approach, combining insights from biomechanics, psychology, engineering, and design. REBA (Rapid Entire Body Assessment) and RULA (Rapid Upper Limb Assessment) are widely used ergonomic assessment tools that evaluate the risk of musculoskeletal disorders (MSDs) associated with workplace postures and movements. REBA assesses whole-body postures, focusing on the neck, trunk, and legs, while RULA targets upper limb disorders by evaluating shoulder, elbow, wrist, and hand positions. These tools provide quick and systematic evaluations, helping to identify high-risk activities and prioritize ergonomic interventions (Hignett and McAtamney, 2000; McAtamney and Corlett, 1993).
Modern ergonomic evaluations often utilize digital human modeling (DHM) to simulate human interaction with products and environments. DHM tools, such as the AnyBody Modeling System, Jack (Blanchonette, 2010), and IMMA (Delfs et al., 2014), allow for the creation of virtual mannequins that can perform tasks within a simulated environment. These tools help in analyzing posture, reach, force exertion, and joint angles, thereby identifying potential ergonomic issues early in the design process (Dahibhate et al., 2023). The integration of advanced ergonomic evaluations into the design process follows a user-centered design approach, ensuring that products and systems are tailored to meet the needs and limitations of the end-users. Incorporating REBA and RULA assessments ensures that both whole-body and upper limb postures are optimized (Wolf et al., 2022).
Ergonomic considerations during the assembly process of harness routing are gaining attention. Poor ergonomic design can lead to increased assembly time, higher error rates, and even workplace injuries, impacting both productivity and worker well-being. Several studies have focused on the integration between monitoring of an assembly processes using video or other monitoring processes and ergonomic evaluation (Balaraman et al., 2018; Joung and Noh, 2014).
Recent studies have highlighted the importance of integrating ergonomic assessments into the design and optimization process (Caputo et al., 2019). For instance, Iriondo Pascual et al. (2022) proposed a method which integrate ergonomic considerations with multi-objective optimization for a holistic approach to evaluation of spot welding processes. The same tool for ergonomic evaluation as in this study (IMMA) is used showing the usability of the method to create processes optimized not just for performance and cost but also for human factors.
Bayesian optimization
Bayesian Optimization (BO) is an effective technique for optimizing functions that are expensive to evaluate or whose exact forms are unknown. This iterative process builds a probabilistic model (a surrogate) of the objective function, typically using Gaussian Processes (GPs), and uses an acquisition function to determine the next points to evaluate. The surrogate model captures the uncertainty in the objective function, while the acquisition function balances exploration (searching new areas) and exploitation (refining known good areas) to find promising points for evaluation (Frazier, 2018). In multi-objective optimization, the goal is to optimize several objectives simultaneously, leading to a set of trade-off solutions known as the Pareto front (Andersson, 2000). Extensions of BO to multi-objective scenarios incorporate acquisition functions that consider multiple objectives, facilitating efficient improvement of the Pareto front. The hypervolume metric is crucial in multi-objective optimization as it measures the volume of the objective space that is dominated by the Pareto front. Hypervolume-based methods, such as Expected Hypervolume Improvement (EHVI), guide the optimization process by quantifying the expected increase in hypervolume when evaluating a new point. This drives the search towards regions that will improve the Pareto front (Pawar and Warbhe, 2021). The q-Expected Hypervolume Improvement (qEHVI) method generalizes EHVI to handle batches of q points, enabling multiple evaluations to be conducted in parallel. This extension leverages modern computational resources, allowing for simultaneous evaluations and accelerating the optimization process. In real-world scenarios, evaluations often involve measurement noise, necessitating the incorporation of noise into the optimization process to ensure robust and reliable outcomes. The qNEHVI method extends qEHVI to account for noisy evaluations, making it particularly suited for practical applications where noise is a common issue. By integrating these advanced techniques, Bayesian Optimization becomes a powerful tool for tackling complex, multi-objective optimization problems in various fields, offering efficient and reliable solutions (Balandat et al., 2020).
Harness optimization framework
This work has developed an optimization framework for harness optimization which enhance the techniques established by Karlsson et al. (2024) by enabling multi-objective and multidisciplinary optimization. In addition, the developed framework adds functionality for data visualization to select different solutions. Figure 3 provides an overview of the steps in the framework. This process is divided into three main stages, one for pre-processing and setting up the optimization, one for the actual optimization and the last for selecting a suitable design with the aid of data visualization. The process is explained in detail in the subsequent sections. An overview of the steps within the developed framework.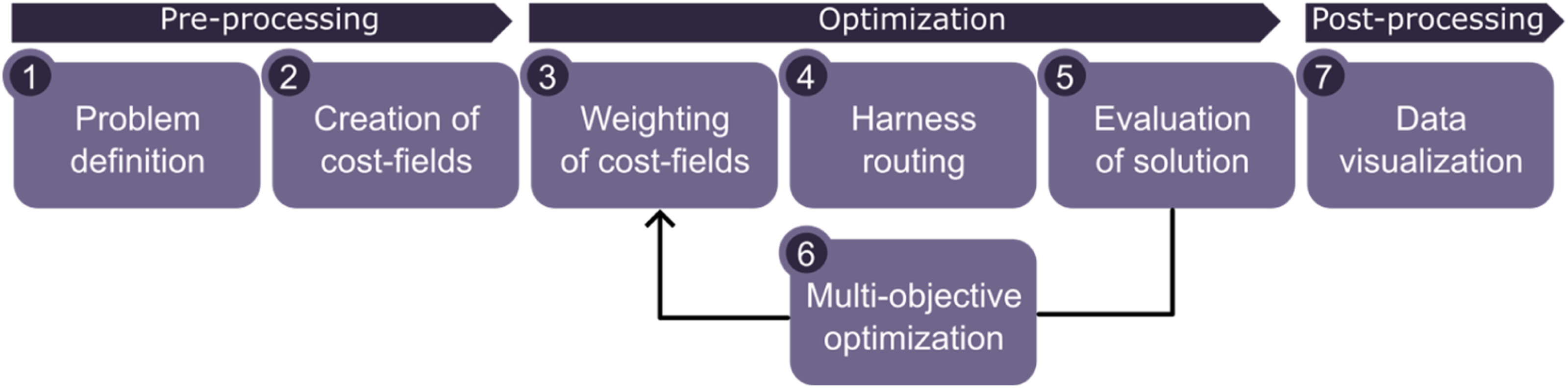
Pre-processing
The primary task in the problem definition stage is to specify the cables that need optimization within the harness. This involves defining the start and end nodes for each cable, along with the type of cable to be used. As illustrated in Figure 2, it is also crucial to consider the relevant geometries. Three settings can be applied to these geometries: those to avoid, those to be near, and those considered neutral. Additionally, a clearance factor can be defined if there is a minimum distance requirement from a geometry. Beyond these initial settings, the user can specify two other types of additional settings. The first type relates to the desired end results, such as preferences for the minimum distance between branching points and the maximum and minimum distances between clips. The second type pertains to optimization performance, including factors such as the size of the design space, the distance between grid points, and the number of points to be used in the ergonomic evaluation. In the framework, these preferences are defined in a JSON file, which serves as input for the optimization process. This structured approach ensures that all relevant factors are considered, facilitating a thorough and efficient optimization of the harness.
Based on the problem definition cost-fields are created. As described in section 2.1 the cost-field is a grid graph with evenly spaced nodes in the design space with a cost assigned to each node. The cost-field creation is a multidisciplinary process where the cost for each created cost-field represents different properties in the optimization. In this case two separate cost-fields are created, one which represents geometrical preferences and the other is based on ergonomic representing how easy it is to reach different areas in the design space. The geometrical cost-field is based on the same algorithms as presented by Karlsson et al. (2024) where the cost for each node in 3-D space is calculated based on the distance to surrounding geometries. Nodes close to geometries that should be avoided (e.g. because they are hot) get a high cost and nodes close to geometries we want to be near get a lower cost (see Figure 2). Whereas nodes distanced further away from any clippable geometry than the maximum clipping distance allowed is automatically set to infeasible.
The ergonomical field represents how good the solution is from an assembly perspective. This is done by calculating an ergonomical score for the nodes in the grid using the software IMMA (Delfs et al., 2014). In this software a DHM manikins is used to calculate how a human would need to move to grab the point, and based on these simulations a REBA and RULA score is calculated. The framework allows several manikins used to calculate the reachability from different locations. The number of manikins and starting positions of each manikin needs to be setup before the procedure. Based on this setup the framework automatically evaluates the reachability for all the manikins using both its left and right hand (see Figure 4). The minimum REBA and RULA score out of the alternatives are set to be the node value, e.g. representing the best posture to reach each point. To speed up this process only a subset of the nodes is used and the nodes in between is interpolated utilizing a radial basis function (“RBFInterpolator — SciPy v1.14.1 Manual, n.d”). The output from this procedure is one cost-field representing the REBA and one representing the RULA value. The ergonomic evaluation where a manikin is set to reach the coordinate, we want to evaluate. Two separate manikins are used where both the left and right and are evaluated. The best score is set to be the ergonomic score for the coordinate.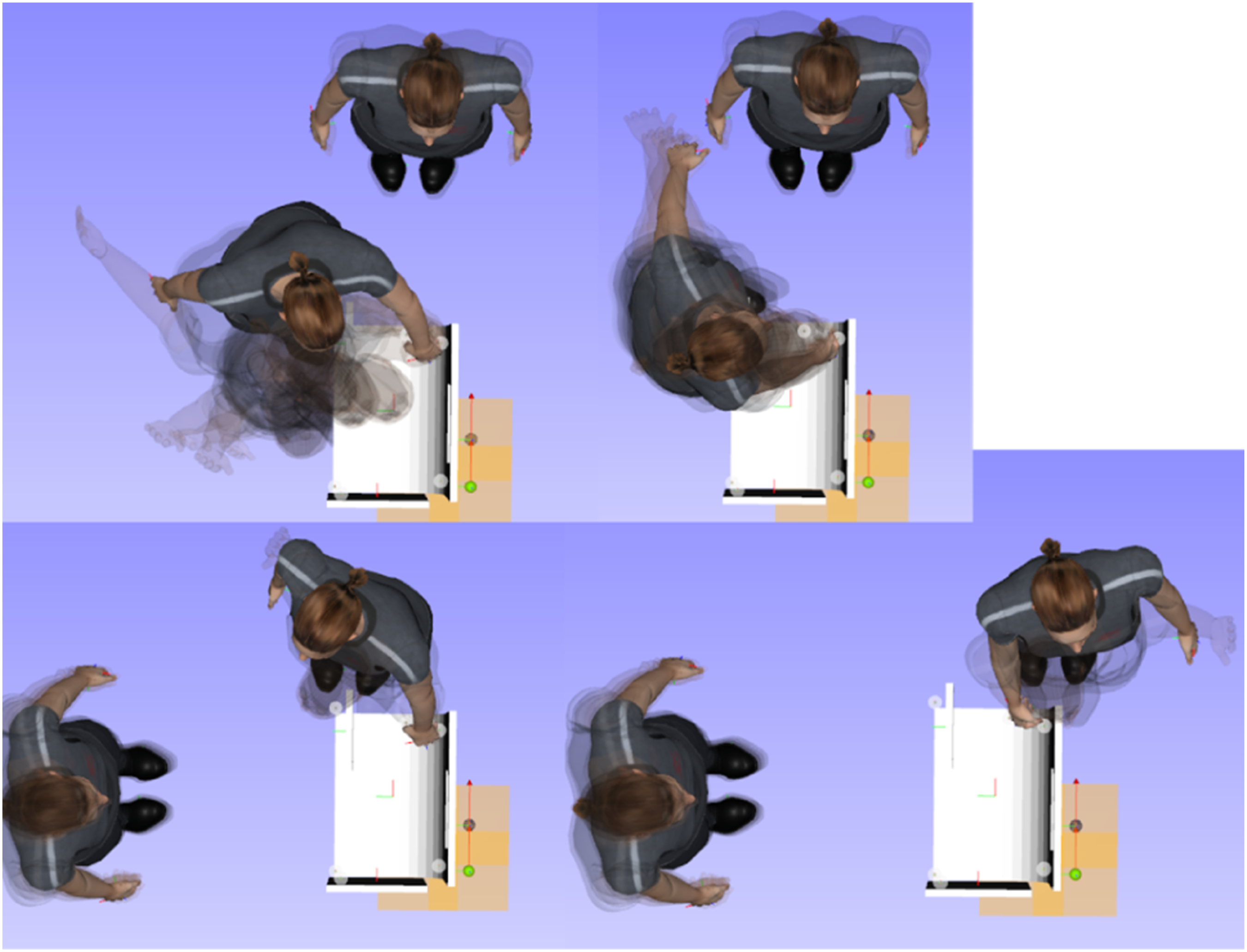
Figure 5 show an example of the full pre-processing procedure where first the problem is setup, then one geometrical based cost-field and one ergonomic based cost-field is created. (a) Harness setup with three cable (1–3) with one start node and one end node for each cable. Three geometries which all have a routing preference defined as ‘near’ and all active during assembly. (b) The first cost-field created based on only the geometric preferences and where routing close to the geometries are cheaper and routing further away from any chippable geometry is unfeasible. (c) The cost-field created based on the ergonomic score (REBA), compared to the geometry based it is easier to reach the open areas between the components but more difficult in the tighter spaces closer to the geometries. The unfeasible areas are transferred from the geometry field.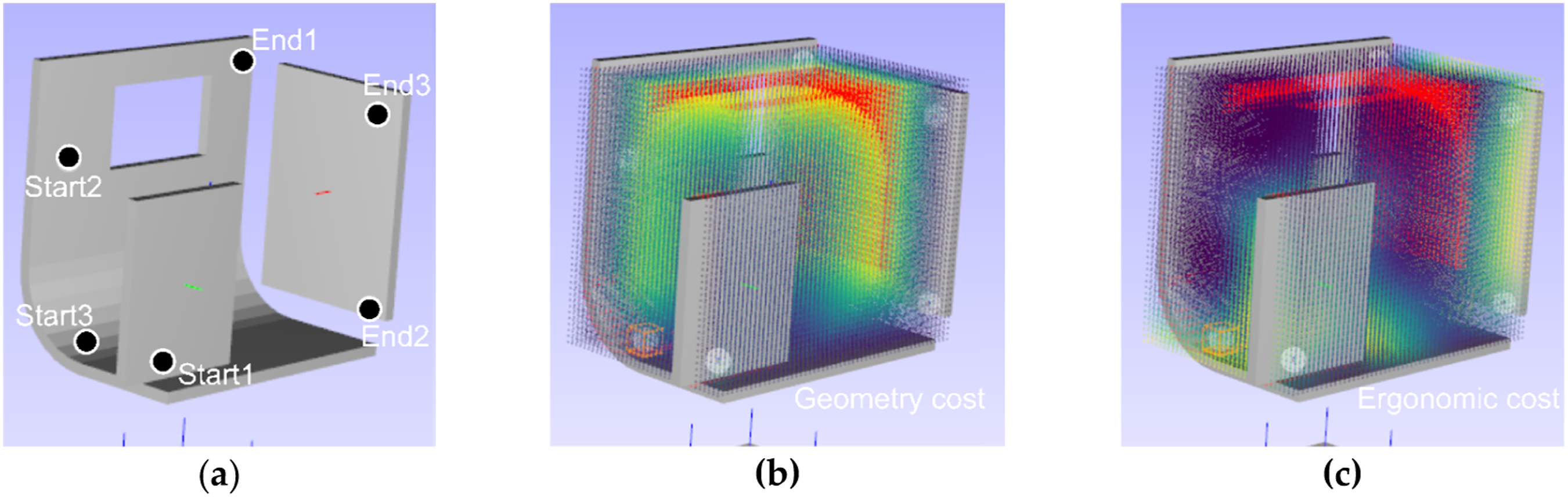
Optimization
The harness optimization is in iterative process which utilizes the algorithms developed by Karlsson et al. (2024) which finds the cheapest possible solution for a given cost-field (lowest sum of the passed nodes). What the framework developed in this work adds to this is that it varies the cost-field sent to inner optimization. This variation is achieved by combining the cost-fields created for different purposes in the pre-processing. The combination of cost-fields is performed using a weighted sum approach where the cost-fields are normalized. Normalization ensures a fair compromise between the different fields by bringing them to a common scale. After normalization, the weighted cost-fields are summed elementwise. This means that each corresponding element from the different fields is added together to form a composite cost-field. In the weighted sum each cost-field gets a weighting factor between zero and one. To avoid solutions which are infeasible for one of the included factors (the cost of visiting the node is set to infinity), the weight of each cost-field is set to be larger than zero.
Properties calculated for each created harness.
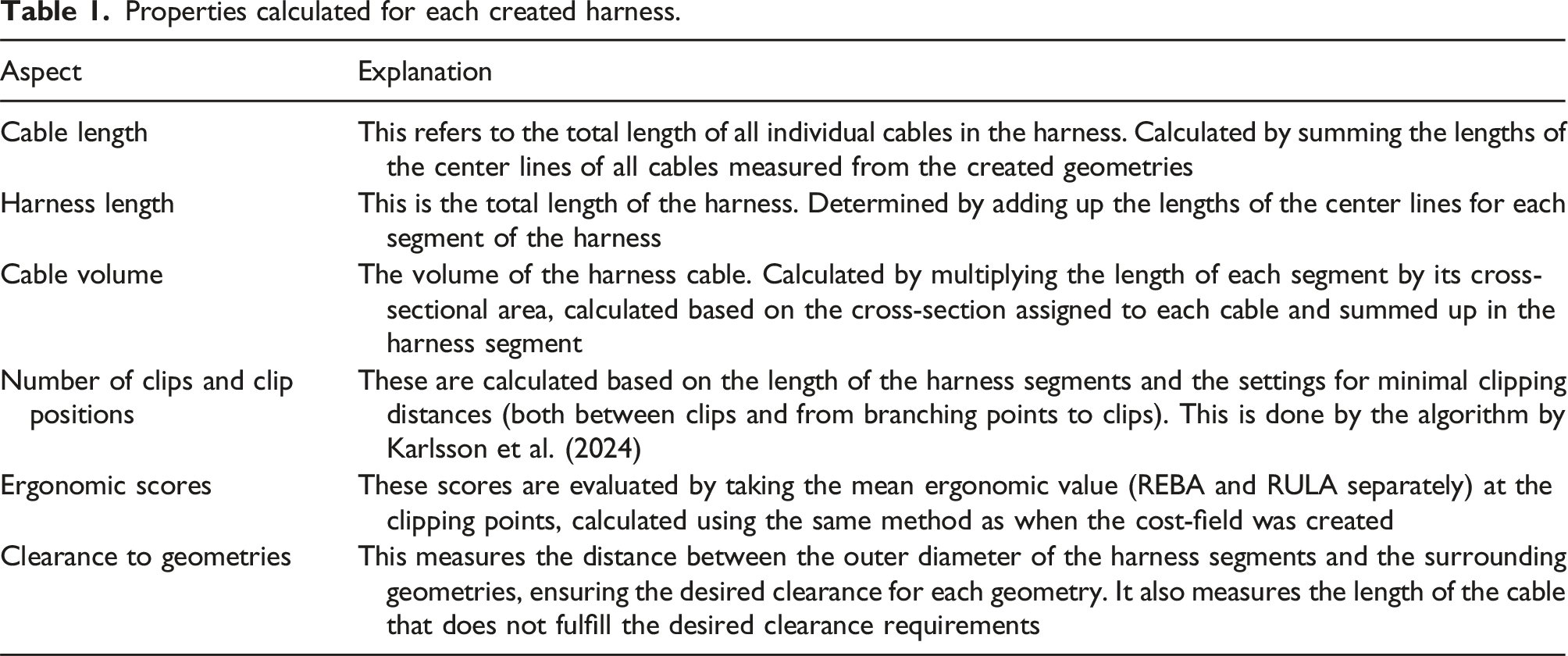
Based on the responses from the harness optimizer a multi-objective optimization process is used in order to create a trade-off between design objectives. The design variables in this case is the weightings between the cost-fields which creates a new input to the harness optimizer. The objectives for the optimization are to minimize the harness volume, mean ergonomic score, and the number of clipping points. Meanwhile, the clearance to geometries is set as a constraint, requiring it to be less than or equal to zero (the entire harness fulfills the clearance constraints). The mathematical formulation of the problem is shown in equation (1). f1(x) is the harness volume f2(x) is mean ergo score f3(x) is number of clipping points g(x) is the distance of harness not respecting clearance to geometries x
i
is the weighting of the cost-field ε is a small positive constant
The optimization problem is addressed using the Bayesian optimization framework described in (Balandat et al., 2020). This is a surrogate assisted based optimization approach as explained in section 2.2. and Figure 6. The optimization framework follows an iterative process to efficiently explore and optimize design choices while minimizing computational cost. The process begins with the creation of an initial Design of Experiments (DOE), where a small set of design points is selected and evaluated. These initial points serve as the foundation for building a probabilistic surrogate model. This model predicts the outcomes of different design choices and their associated uncertainties, allowing the framework to make informed decisions without exhaustively evaluating every possibility. Flowchart for the Bayesian optimization approach used.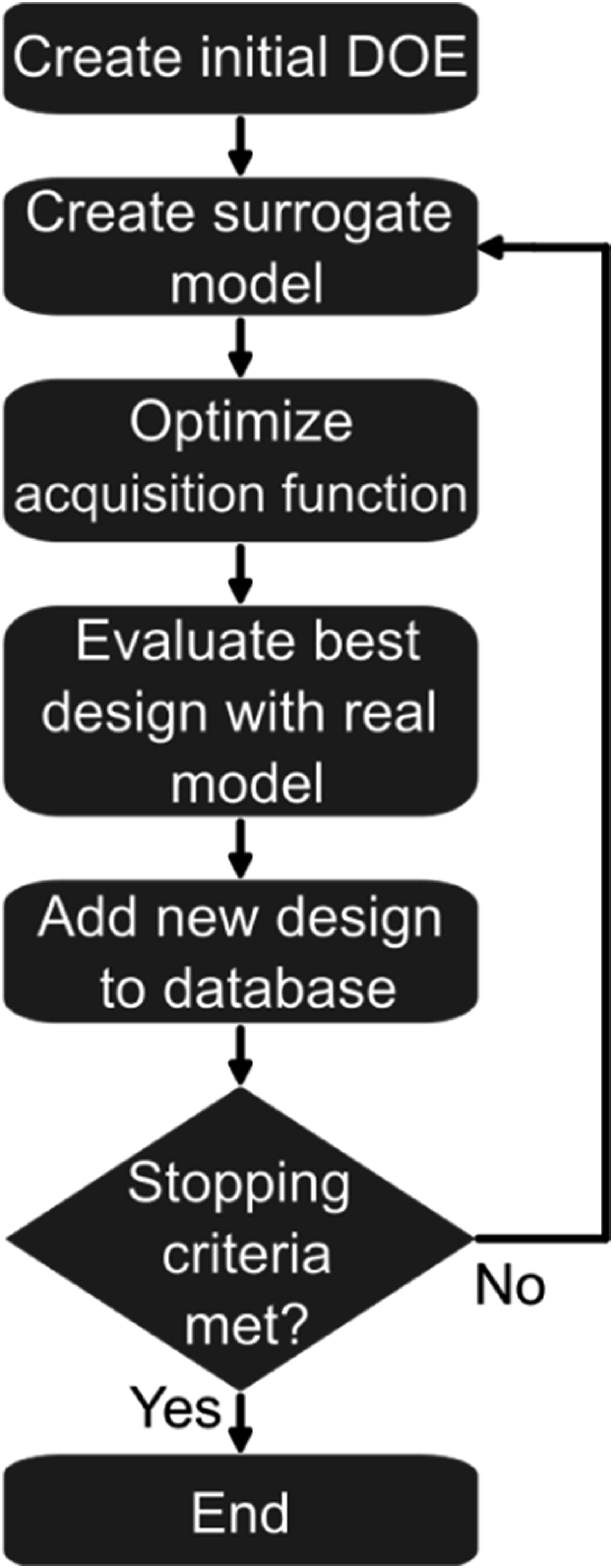
Once the surrogate model is established, the next step is to optimize an acquisition function, which determines the most promising design points to evaluate next. In this work the objective is the expected improvement of the pareto hyper volume. The framework employs Monte Carlo sampling on the surrogate model to estimate the distribution of potential outcomes, enabling a robust approximation of possible improvements. This step helps balance exploration (sampling uncertain regions) with exploitation (focusing on areas known to perform well). After selecting the most promising designs, the framework evaluates them using the real model, meaning performing a harness optimization. This new design, along with its performance metrics, is then added to the database, updating the surrogate model and refining future predictions. A key aspect of this process is the number of generations and individuals in each generation, which are important parameters in the optimization loop. The number of generations refers to how many iterations the optimization process undergoes, with each generation representing a cycle of improvement where new designs are generated, evaluated, and added to the database. Within each generation, there are multiple individuals, which correspond to different design candidates being tested in parallel. A higher number of individuals per generation allows for a broader exploration of the design space, while more generations enable continued refinement and convergence toward an optimal solution. These parameters control the trade-off between computational cost and solution quality, ensuring that the optimization efficiently balances speed and accuracy. The process continues iteratively, with each cycle refining the surrogate model and acquisition function. At each step, a stopping criterion is checked, in this case maximum number of generations, if the criteria are fulfilled the optimization terminates. Otherwise, the framework repeats the process, progressively enhancing the designs until the optimal solution is identified.
Post-processing
The solutions from the optimization can be visualized in a graphical user interface (which also is used for setting up the optimization study) developed in the Python package Panel (“Overview Panel v1.5.0, 2019”), see Figure 7. The user interface presents the created solutions in table form and two interactive graphs (one scatter plot and one spider chart) which allows the user to explore and filter solutions. The attributes of the harness solutions presented in the user interface is coupled to the geometrical representation of harness designs created in the software IPS. GUI used for handling the input to the optimization (left column) and visualization and exploration of the optimization results.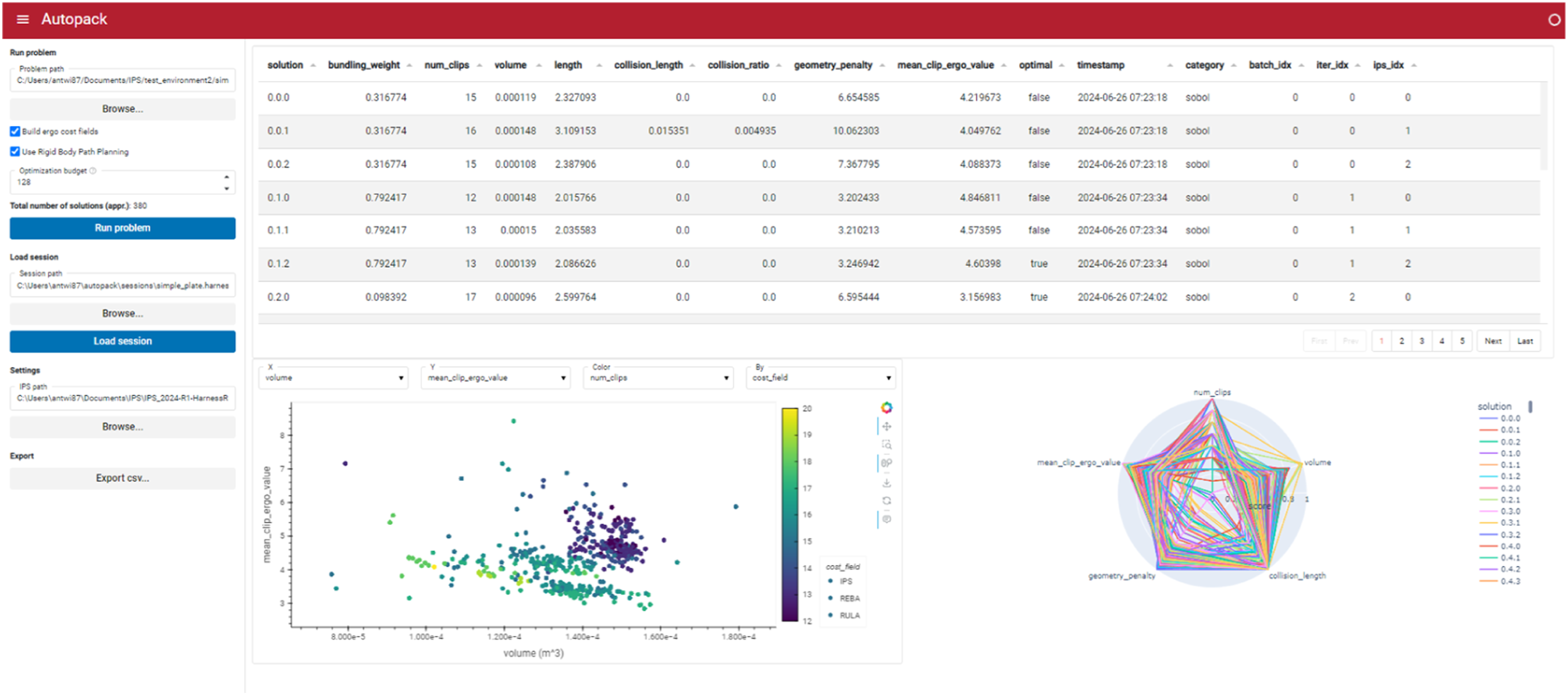
Evaluation
The develop framework has been evaluated on two separate test cases. The first case is somewhat simpler with the focus to evaluate the functionality of the framework including the multi-objective optimization. The second test is a case-study that is much more difficult taken from an industrial scenario in the automotive industry including complex geometries where the frameworks usability is evaluated by multiple users in a realistic industrial setting.
Case 1 – functional evaluation
In case 1 a simplified problem inspired from the automotive industry. The test case comprises a small harness chassis like component and is solved by the developers of the framework. The problem is the same as presented in Figure 5 which shows the three different cables in the harness. During this optimization 520 designs were created in 16 generations (one initial design of experiment and then 15 generations). The result from the optimization process can be seen in Figure 8. Optimization results from the initial test case. (a) Visualization of the identified Pareto-optimal harness solutions, demonstrating that the framework is capable of generating alternative routing paths rather than converging to a single configuration. (b) Progression of the minimum objective values across generations, showing that good solutions are discovered early in the process and that global minima for all objectives are reached within eight generations. (c) Growth in the number of Pareto-optimal solutions, indicating that the framework continues to discover new trade-offs throughout the optimization. (d) Expansion of the hyper volume of the Pareto set, illustrating that the solution set becomes rapidly diverse in the early generations but stabilizes after approximately 10 generations, confirming convergence.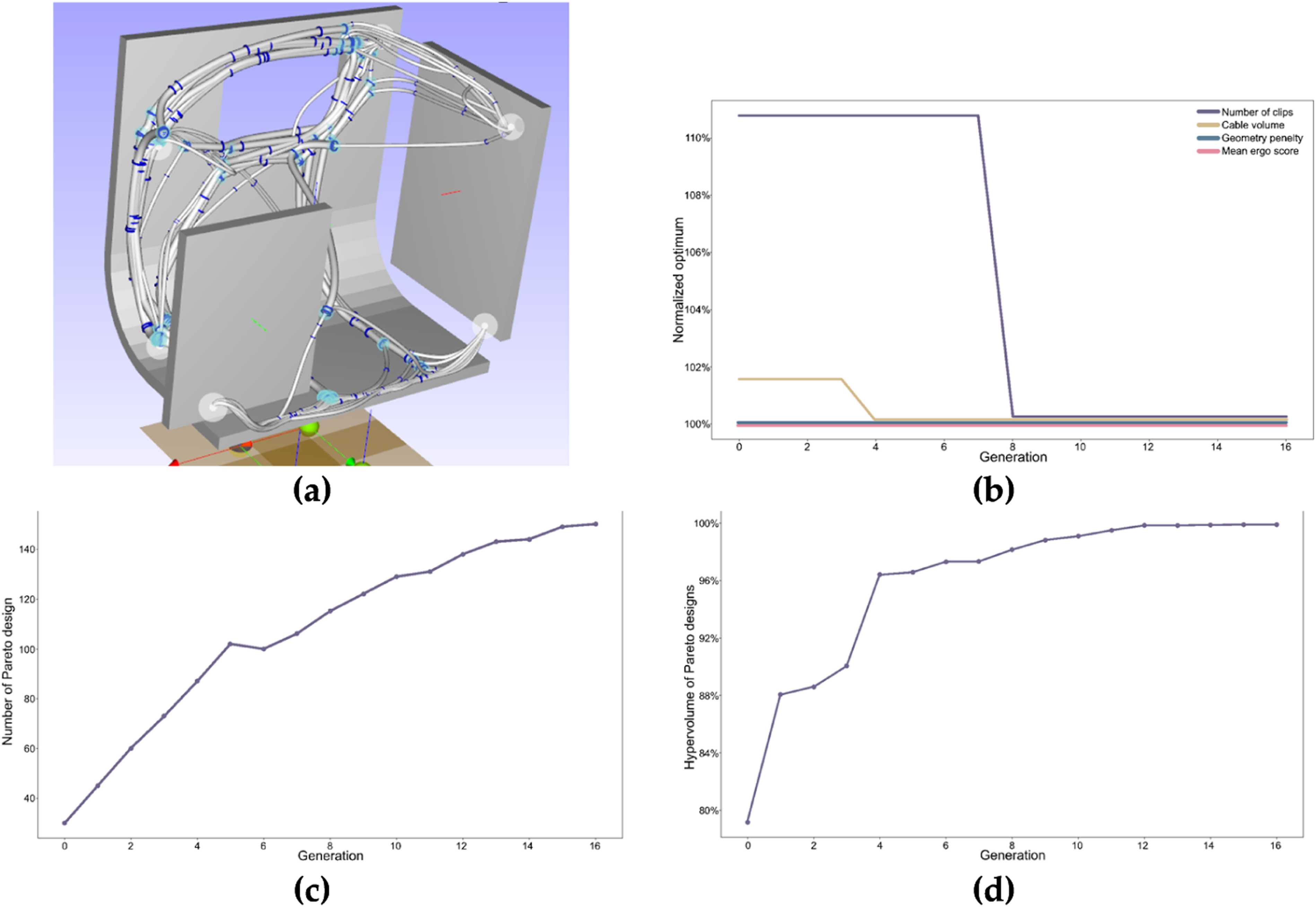
As shown in Figure 8, the framework can identify various solutions using different paths in the geometry. The optimization indicates that the optimum value for the objectives is not improved that much during the process. On the other hand, the number of pareto optimal solutions increases much with more generations. The number of pareto optimal solutions found increases during the whole optimization and does not seem to have converged when the optimization was ended. The pareto hyper volume increases fast during the first generations and then flattens out with full convergence during the last generations. This behavior is not unexpected since the Bayesian optimization algorithm used have as objective to increasing the pareto hyper volume. The overall behavior indicates that the multi-objective optimization algorithm added on top of the framework from Karlsson et al. (2024) enable the creation of a variation of solutions giving the user more design alternatives. The optimization does not show a large improvement in single objective values during the optimization process but successfully increases the number of pareto optimal solutions and the pareto volume. This indicates that the framework can create more and better alternative solutions during the optimization.
Case 2 – industrial validation
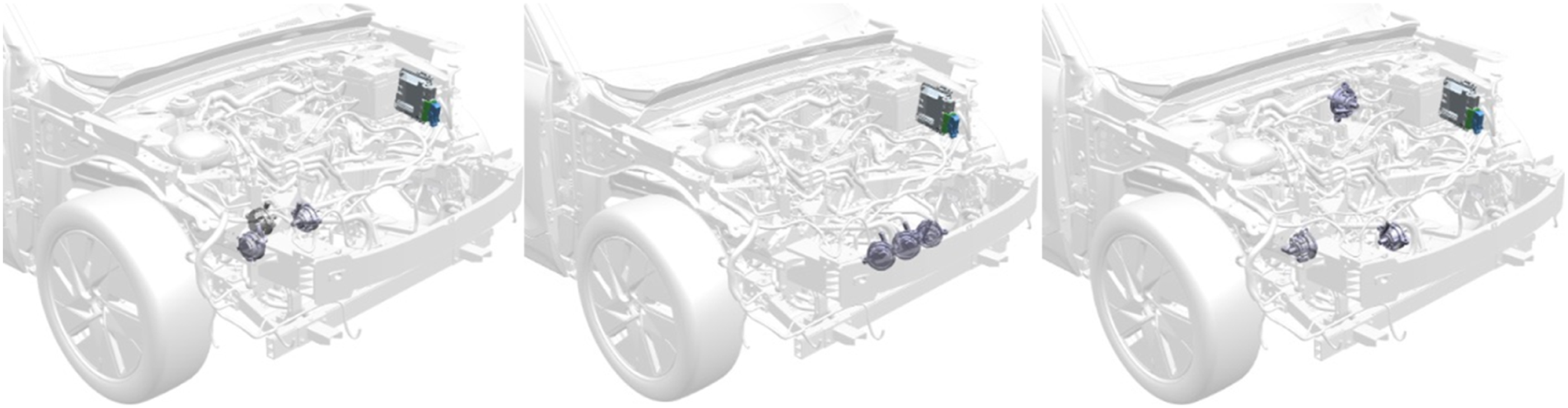
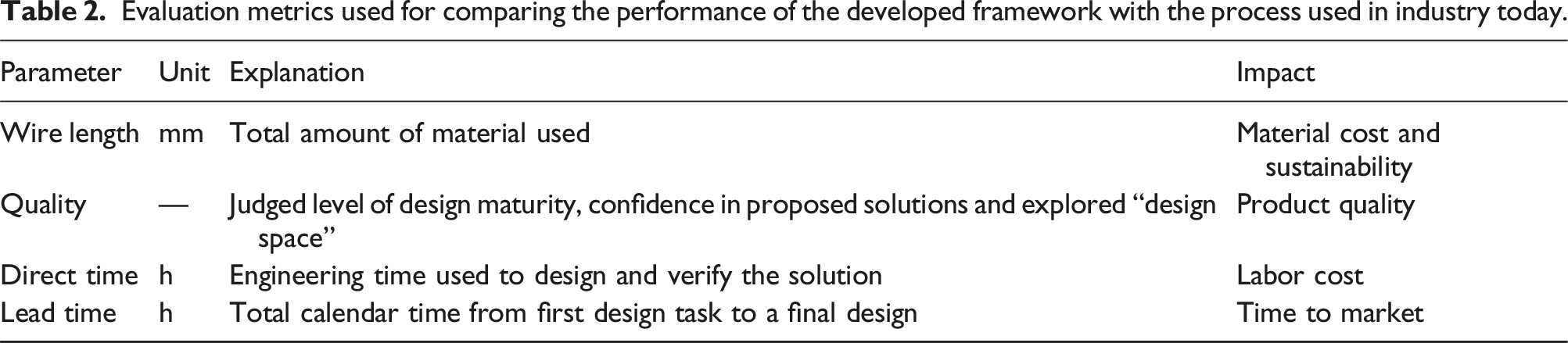
To test how well the developed framework works in an industrial setting, a real-world scenario was created based on upgrading a vehicle’s engine compartment with new technology. Figure 9 shows the methodology used for the evaluation. A design problem consisting of three new three new electrical pumps, which required both hose and cable routing. The task was to evaluate three potential placements of the components (see Figure 10), aiming to minimize hose and cable lengths, lower material costs and weight, while also ensuring that the components and wiring were easy for workers to access and assemble in the factory. Two separate groups of engineers were given this same task, one group which was supposed to use the current design tools and one group which was using the framework developed in this study. The design solutions for each engineer were evaluated together with the time spent. The matrices used for evaluation of each design solution is presented in Table 2. These were then used in the evaluation where the results were compared to each other to evaluate the impact of the developed framework. Method for industrial validation. Three different scenarios with alternative placements of three pumps used for validation of the proposed framework. Evaluation metrics used for comparing the performance of the developed framework with the process used in industry today.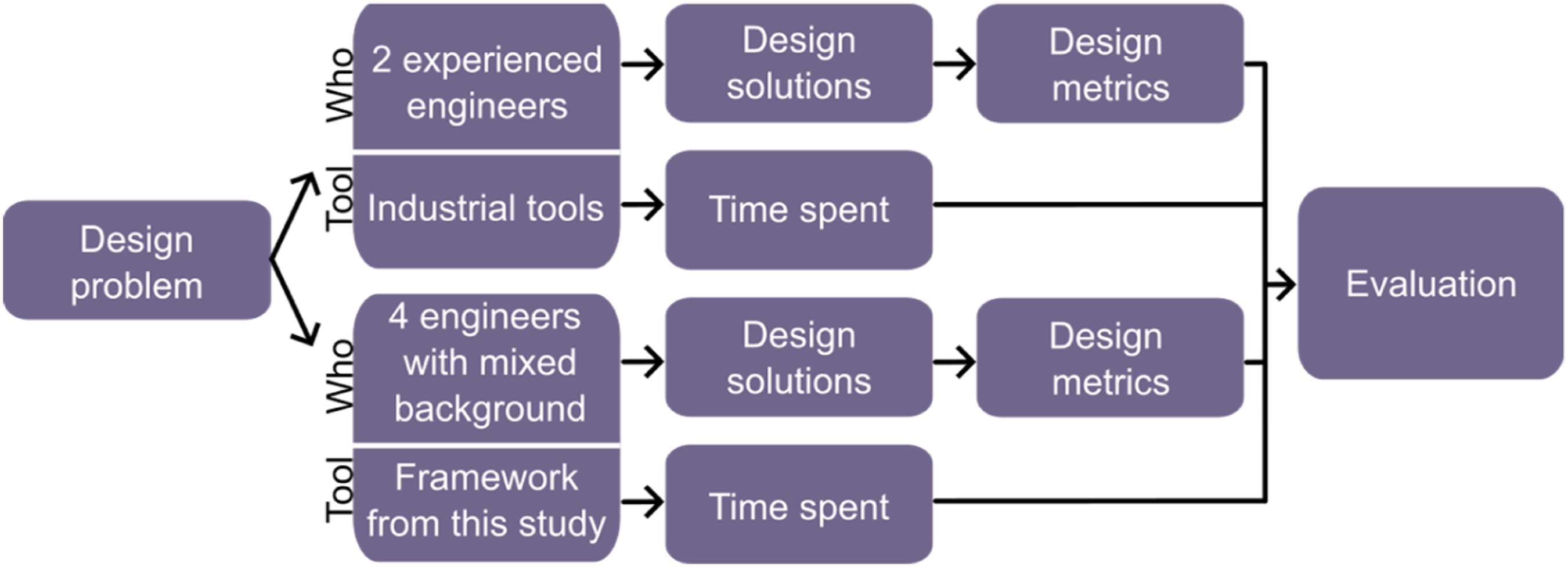
The engineering time for each designer was measured from receiving the instructions until they were satisfied with their conceptual design for each of the three cases. In the existing development process the conceptual design stage is followed by an integration meeting with mechanical integration, manufacturing preparation, and cable design teams to review the conceptual design proposals. In this step the engineering time was measured for the meeting, preparations, and analysis. Additionally, the lead time between meetings was recorded as well. The measured metrices were averaged for the two test groups to get comparative measurements.
The total engineering time and consequently the total labor cost, is reduced to 2/5 of the current manual design process at VCC, see Figure 11. This indicates that the developed framework has the potential to reduce engineering time and costs by 60%, as it performs cable design significantly faster. However, the lead time was only reduced by 15% compared to the reference case, this is due to the need for more design iterations than expected. This outcome is attributed to the lower-than-anticipated quality of the results generated, highlighting the need for further improvements in solution quality. Comparison between the developed framework and the current manual process. The results show that the framework reduces the total engineering work time by approximately 60%, highlighting its potential to significantly improve efficiency in design activities. In contrast, the total lead time is reduced by only 15%, which indicates that while the framework accelerates the engineering tasks themselves, the overall process remains constrained by the need for interdepartmental iterations and discussions. This distinction demonstrates that the framework primarily benefits the efficiency of engineering execution, whereas organizational factors continue to influence overall project timelines.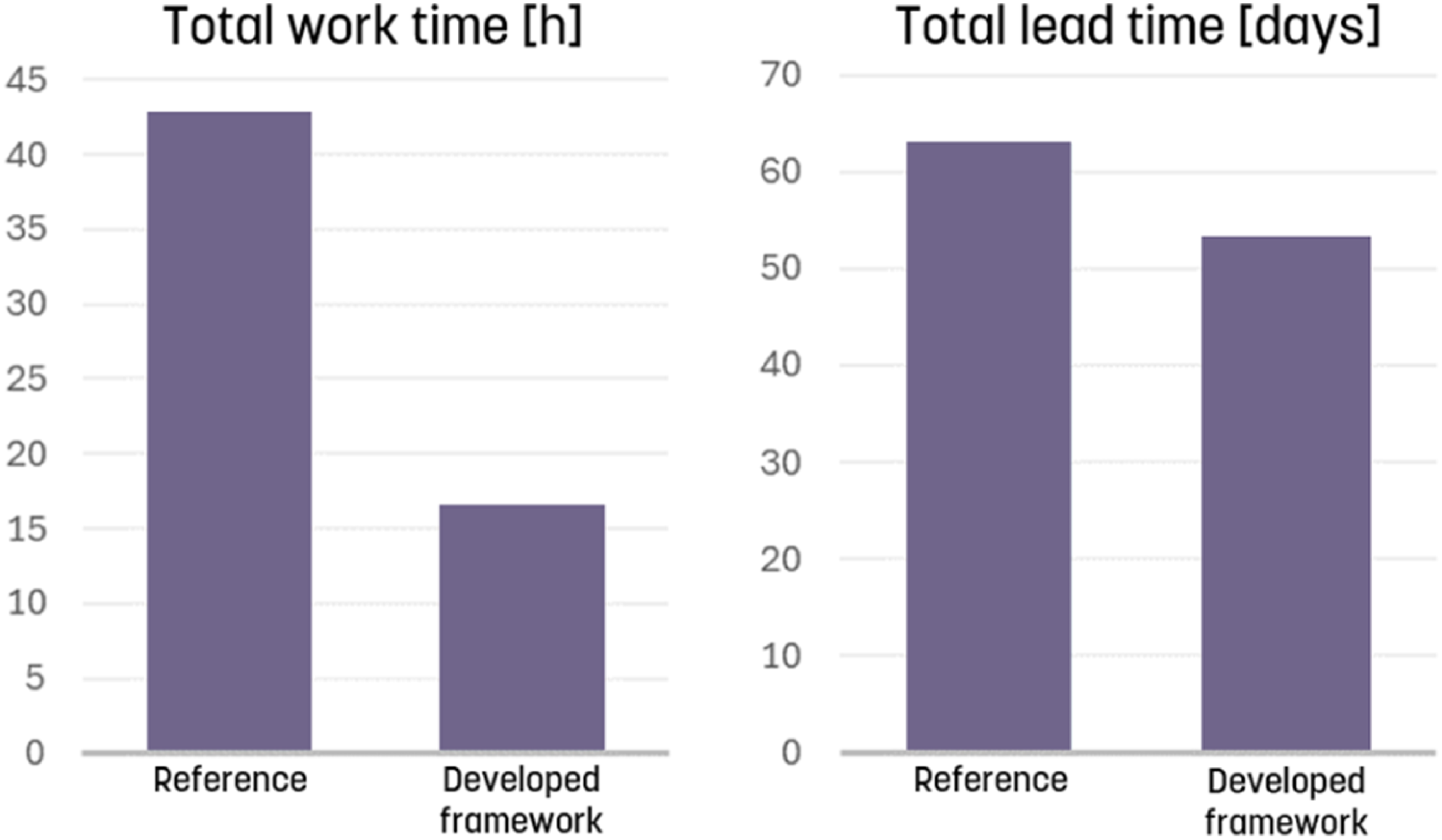
Material costs per vehicle, i.e., the amount of wiring and material used, showed a 15% reduction, hence the framework can find short paths between the connection points. However, on most occasions these savings are not achievable in practice, as they result from shortcuts taken by the framework that are not feasible due to limitations that have not yet been implemented in the framework. As a result, the generated solutions do not always meet the necessary manufacturing and assembly requirements for wiring harnesses, as is exemplified in Figure 12. Three main issues, all related to ergonomic feasibility, were identified in connection with the proposed solutions. First, the current ergonomic evaluation only considers reachability and the availability of sufficient space at the clipping points; however, it is also required that the operator’s hand can move freely along the entire routing path. Second, in accordance with company standards, it is not permitted for the harness to be routed through holes or between existing components, which imposes further constraints on the design. Third, the ergonomic evaluation does not account for the requirement that the routing must remain visible throughout. Analyze one proposed solution showing that the solutions created do not fulfill all assembly requirements.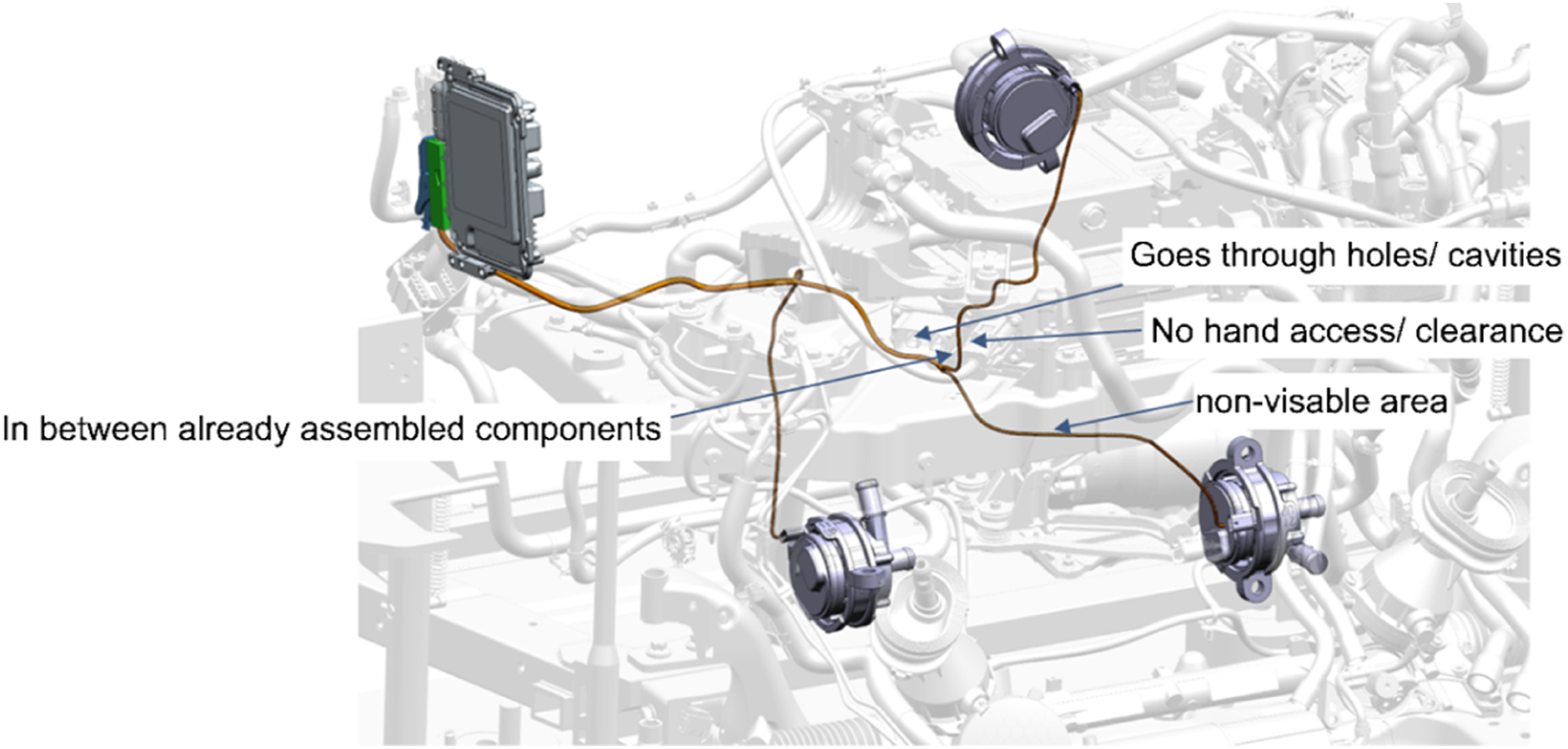
A second question raised during the evaluation was the possibility of the framework to create even more diverse sets of solutions. During the test case the users noticed that most of the solutions followed 2–3 main paths with just minor variations within these. The users thought it would be beneficial to find even more diverse solutions even if these may not be optimal in any of the defined aspects.
Discussion
The results from the two case studies demonstrate the effectiveness and potential of the developed multidisciplinary harness routing framework. In Case 1, the framework successfully generated a variety of harness solutions, showcasing its capability to explore different routing paths and optimize multiple objectives simultaneously. The increase in the number of Pareto optimal solutions and the expansion of the Pareto hyper volume indicate that the framework can provide diverse and improved design alternatives. However, the optimization process did not significantly enhance single objective values, suggesting that the framework’s strength lies in generating a broad range of viable solutions rather than focusing on individual metrics.
In the second case-study, the framework’s application in an industrial context revealed its potential to reduce engineering time and costs significantly. The reduction in engineering time by 60% highlights the framework’s efficiency in automating the cable routing process. However, the modest 15% reduction in lead time suggests that further iterations and refinements are necessary to fully realize the framework’s potential. The lower-than-expected quality of the solutions generated underscores the need for continuous improvement and integration of additional constraints to meet manufacturing and assembly requirements. The lower-than-expected quality of the solutions generated underscores the need for continuous improvement and integration of additional constraints to meet manufacturing and assembly requirements. Although the DHM software applied in this study is commercially available and already used by the industry partner, some uncertainty remained regarding the reliability of the results. Feedback from the partner indicated that, in current practice, such tools are typically used in an iterative manner, refining the models in combination with practical testing to ensure robust outcomes. To address these challenges, the ergonomic evaluation methodology applied here should be extended beyond reachability and clipping-point access to also include continuous hand clearance along the routing path. Furthermore, alternative routing strategies need to be developed that comply with company standards by avoiding the use of holes or gaps between existing components, for example through optimized harness layouts or dedicated routing features. Finally, visibility requirements should be integrated into the evaluation criteria to ensure that the routing remains accessible for inspection, maintenance, and quality assurance. It is also worth noting that the second case study was considerably more complex than the test cases used during framework development. Had more difficult examples been considered earlier, it would have been possible to explore a broader range of alternatives in the assembly simulation. It is worth noting that the second case study is much more difficult compared to the cases used as tests during the development of the framework. With more difficult examples used during the development it would have been possibles to further explore alternatives in the assembly simulation.
An additional aspect concerns the diversity of geometric solutions. As observed, most results tended to converge toward a limited set of main routes with only minor variations. Since the implemented Bayesian optimization primarily aims at maximizing hyper volume, there is a risk that the search becomes concentrated within a narrow region of the design space, thereby overlooking other promising areas. Two complementary strategies could be applied to address this limitation. The first is to refine the Bayesian optimization process itself, for example by adopting acquisition functions or modeling strategies that place greater emphasis on uncertainty and thereby promote a broader exploration of the design space. The second is to enhance diversity at the level of the generated solutions by applying geometric comparisons and clustering techniques, ensuring that the final solution set represents a wider range of routing alternatives.
Regarding scalability if the problem formulation increases with more nodes and geometries, the Bayesian optimization itself does not grow in complexity, as the number of cost fields, and thus the design variables, remains constant. The added complexity lies in generating the cost fields, but this step is computationally efficient and scales well. The main effect of larger systems is therefore an increased number of iterations, as more alternatives may emerge, which extends runtime but remains tractable.
The findings align with previous studies emphasize the importance of incorporating ergonomic considerations and multi-objective optimization in harness routing. The integration of Bayesian optimization and digital human modeling tools, such as IMMA, enhances the framework’s ability to address complex design challenges and improve overall system performance. Two aspects for further development were identified during the evaluation of the framework. One is the already mentioned lack of quality in the solutions from an assembly perspective highlighting the need of development of better assembly simulations. The second is the desire to get more geometrically variations in the solutions.
Conclusions
The developed multidisciplinary harness routing framework represents a significant advancement in the field of cable harness design. By integrating multiple design aspects, including ergonomics, geometrical feasibility, and assembly considerations, the framework provides a comprehensive solution for optimizing harness routing. The use of Bayesian optimization and digital human modeling tools enables the generation of diverse and improved design alternatives, reducing engineering time and cost.
The framework developed in the paper has been evaluated through two evaluation processes where one was done in an industrial setting with engineers from a car manufacturing company. This evaluation demonstrates the framework’s potential to enhance the cable design process with an expected reduction in labor time of 60%. To fully realize these benefits further refinement of the framework is necessary. The findings highlight the importance of continuous improvement and the integration of additional constraints to meet practical manufacturing and assembly requirements. Future research should aim to refine the framework’s algorithms, incorporate more realistic constraints, and validate the approach in various industrial contexts.
By addressing these challenges, the framework can significantly contribute to the efficiency and effectiveness of harness routing in the automotive and other industries, ultimately supporting the transition towards more complex and electrified vehicle systems.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the VINNOVA (2020-05173).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Author biographies