
Abstract
Background
Silviculture education requires understanding complex, spatially distributed ecological processes and the long-term effects of forest management decisions. These concepts can be difficult to convey through traditional teaching methods. Virtual Reality (VR) offers an immersive, interactive way to explore complex systems in domains such as silviculture, and design considerations, such as diegesis, may influence learning outcomes.
Aim
This study introduces SilVR, an immersive VR simulation for teaching silviculture concepts, and investigates the effect on user engagement, usability and learning outcomes of two user interface (UI) paradigms: diegetic (lesson components and controls integrated into the virtual environment, e.g., physical buttons, maps) and non-diegetic (elements presented in a consistent, non-immersive format, e.g., transparent panels, floating text).
Method
SilVR was developed using a predictive forest growth model, allowing users to explore forest outcomes under different management regimes. A between-participants study was conducted as part of a graduate training workshop, with factors of diegetic and non-diegetic information presentation. Nineteen forestry students participated in the study. Each participant completed a pre- and post-intervention knowledge assessment. The system captured user behaviour, and participants completed self-report measures: Intrinsic Motivation Inventory (IMI), presence, and a general feedback questionnaire.
Results
Knowledge scores significantly improved following the intervention. While there was no significant interaction effect due to diegesis on knowledge, students in the diegetic condition progressed through scenes more quickly and exhibited stronger preference behaviour.
Conclusion
Immersive VR effectively supports learning in complex domains such as silviculture. Design considerations, such as diegesis, play a key role in learner engagement and interaction. These findings offer implications for the design of educational VR simulations for forestry and other complex system domains.
Introduction
Silviculture—the art, science and technology of managing forests to achieve specified forest management objectives (ABARES, 2020)—requires understanding complex, spatially distributed ecological processes that evolve over time. Effective silviculture decision-making involves understanding inherently spatial and complex systems, such as canopy dynamics, tree spacing, competition for nutrients, and the long-term impacts of interventions like thinning and fertilisation. Traditional teaching methods can fail to convey these spatial and temporal dynamics effectively (Sterman, 1994).
Virtual Reality (VR) presents a promising addition to traditional teaching methods like lectures and field visits, particularly in domains where immersion and interactivity can enhance conceptual understanding (O’Keeffe et al., 2024; Reichherzer et al., 2021). VR can support learning through interacting with forest simulations, viewing forest stands from unique perspectives and observing interactions in real-time that would otherwise unfold over decades. However, best practices for designing educational VR interfaces—particularly for domains like silviculture—remain unclear.
A key design consideration is how to present information: through diegetic interfaces, which embed content in the virtual environment (e.g., on a map or sign embedded within the scene); or non-diegetic interfaces, which overlay it as abstract elements such as HUDs or floating menus. Diegetic interfaces are believed to enhance immersion by embedding information within the virtual setting, whereas non-diegetic interfaces may reduce cognitive load by providing clearer access to information. Immersion and managed cognitive load are often cited as crucial factors for creating compelling VR learning experiences (Kavanagh et al., 2017; Souchet et al., 2022). However, the relative impact of diegetic and non-diegetic interfaces on learning outcomes in VR remains unexplored. This study presents SilVR, a VR-based silviculture training tool, to examine: 1. What design considerations emerge when developing VR training tools for complex systems education in silviculture? 2. How does interface type (diegetic vs. non-diegetic) affect learning and experience?
We conducted a quasi-experimental study comparing diegetic and non-diegetic interface designs in a VR silviculture training tool with postgraduate domain-expert students to assess their impact on learning and user experience. Though focused on forestry, our findings have broader implications for VR training in other spatial domains.
Background
Virtual Reality (VR) training has gained attention for its potential to deliver immersive, interactive, and context-rich learning experiences. These experiences are widely regarded as effective in enhancing learning motivation, engagement, and knowledge retention (Kavanagh et al., 2017; Rojas-Sánchez et al., 2023) by simulating realistic scenarios in safe, controlled settings. A recent systematic review (Lampropoulos & Kinshuk, 2024) found that VR supports a wide range of pedagogical goals, including the development of cognitive, social-emotional, and psychomotor skills across diverse subjects and education levels. The capacity to tangibly represent abstract concepts, support experiential learning, and foster learning autonomy positions VR as a valuable tool for teaching complex systems. However, despite these perceived advantages, VR training is still a relatively nascent field. As such, evidence-based best practices for its design and implementation are still emerging.
A key factor influencing the effectiveness of VR training is the way information is presented within the virtual environment. Visual design choices can significantly impact recall and aspects of cognitive load (Albus et al., 2021). Poorly designed presentation elements, such as intrusive interfaces, inconsistent metaphors, or unrealistic interactions, can reduce the training’s educational value by compromising immersion and presence. Immersion refers to the consistency and sensory detail provided by the system, while presence describes the psychological sense of “being there” (Slater & Wilbur, 1997); poor immersion can therefore undermine presence, which affects the way students engage with content. As VR continues to evolve, understanding how to optimise these elements is critical to developing effective and scalable training systems.
Diegesis in VR Education
A helpful framework for designing presentations in VR is the concept of diegesis, the world of the story (Abbott, 2002). When designing a narrative, whether in VR or a theatre production, every element of storytelling is considered either inside or outside the story. For instance, a narrator may impact the world, playing a role in the diegesis, or may be situated outside of it, audible only to the audience (in this case, a non-diegetic narrator). Diegetic elements of stories are those experienced by both the characters and the audience, whereas non-diegetic elements are those that separate the characters from the audience via the 'fourth wall'.
In video games, diegetic elements refer to those that are considered part of the game world (characters, objects, etc), whereas non-diegetic elements are those that are used to convey information to the player, but are not considered part of the game world itself (UI, status icons, etc) (Russell, 2011). Games can be designed to avoid non-diegetic elements, with relevant information presented to the player through objects that exist within the game’s narrative. Previous work on diegesis in 2D games (Pfister & Ghellal, 2018) indicates that non-diegetic elements can be better for understanding and presence. Immersion in VR has been linked to improved understanding, as explored in studies comparing VR and desktop experiences. One such study (Buttussi & Chittaro, 2018) on an airline safety training scenario found that display type played a significant role in engagement and presence; however, training benefits were obtained and retained independently of display type. A VR study by Marre et al. (Marre et al., 2021) tested diegetic versus non-diegetic interfaces in a first-person shooter. Their results showed that diegetic interfaces improved performance for novice players, but this benefit did not extend to expert players.
There are perceived advantages and drawbacks to diegesis in VR training. Conceptually, they offer high immersion and presence, but this may also alter learning outcomes. Prior work by Dickinson et al. (Dickinson et al., 2021) explored whether diegetic tool interactions enhanced presence in a crime scene investigation training application. Although the study did not find an elevated sense of presence when using the diegetic interface, it did report higher levels of workload and longer completion times, raising questions about the cognitive trade-offs involved.
While studies have compared VR and desktop for memory retention, few have directly examined the role of diegesis in VR learning outcomes. Given that VR affords a level of immersion and interaction beyond what is typical in 2D games, it is not yet clear whether previous findings about diegesis in game design will translate in the same way to educational VR settings. It remains an open question whether diegetic presentation styles in VR enhance or hinder comprehension and retention of educational content. Investigating this relationship could inform best practices for designing effective and immersive learning environments in VR.
Complex Systems Education and Silviculture
Complex systems are those characterised by the interactions of numerous interconnected components that influence each other in dynamic ways (Yoon et al., 2017). These interactions create a network of dependencies, where the collective behaviour of the system can result in emergent properties that can be difficult or impossible to observe at an individual level.
Understanding these systems requires a holistic perspective that focuses on the interactions and relationships within the entire system. This complexity creates barriers for learning and teaching, with challenges arising from the complexity of the systems, ambiguous and misunderstood feedback, and complexities of mentally simulating the dynamics (Sterman, 1994). As such, there is a need for diverse methodologies in the pedagogy of complex systems. Addressing these needs requires understanding modern approaches to complex system education and building on top of existing methodologies to design teaching tools that foster deeper understanding among students.
One compelling example of a complex system in education is the dynamics of forest growth in silviculture education. Forest growth models are highly complex (Vanclay, 1994): Trees themselves are individual organisms, influenced by the quality of their environment --- soil health, terrain, rainfall, biodiversity, climate, and (by extension) active operations like fertilising and weed control. Each of these factors impacts the growth rate of trees in unique ways. In turn, the trees influence the growth of other trees around them through competition for nutrients and canopy dominance, resulting in complex interactions that may vary considerably across short distances of the same stand.
The dynamics of tree growth are primarily taught through site visits and traditional classroom teaching methods, but as changes in forest dynamics are complex and can take decades to observe in the field, they can be challenging to learn and interpret. VR education presents a compelling use case in this sphere, as simulated forests can show changes in forest dynamics instantaneously. Simulated forest stands have been an ongoing area of interest in this space, whereby a controlled compartment of forest is visualised in a dynamic fashion, with users able to exert influence on the forest (Fabrika, 2003). Such simulated forests can be enhanced through tailored growth models such as SIBYLA (Fabrika et al., 2018) to maximise their relevance to the target cohort, and would be natural candidates for adaptation to VR.
Forest education has leveraged VR through gamification. Perez-Huet (Perez-Huet, 2020) outlines various examples, such as nature simulators where users assume roles like forest rangers, and virtual training, which create safe environments for learning operations like tree thinning and operating UAVs. There have been several explorations of VR for complex systems education in adjacent fields, such as environmental science (Cho & Park, 2023), engineering (Marzano et al., 2015), and agriculture (Greig et al., 2024).
VR has not been explored for complex systems education in silviculture, and such an exploration could yield insights into both. This gap is the basis of our intervention domain.
Intervention: Immersive Education for Silviculture
We developed a VR lesson environment (SilVR) to teach advanced plantation silviculture concepts to existing forestry professionals. We collaborated with domain expert course designers to design content that would complement an existing Silviculture graduate course, in a way that would allow students completing the course to explore the lesson and provide domain-specific feedback.
SilVR was conceptualised as a free-form self-guided interactive lesson covering thinning regimes, impacts, stand density, and forest growth. Our design methodology and a system description are outlined below.
Design Methodology
Overview of Learning Objectives for SilVR.
Scene Outline for SilVR, With Associated Learning Outcomes.
System Description
SilVR was built based on the design framework outlined above. The build was developed in Unity 2021.3.13f1 as a deployable Android APK optimised for the Meta Quest 3 headset, on which it was deployed standalone. The build contained both diegetic and non-diegetic versions of the whole lesson.
Lesson Design
The visual elements of SilVR are designed to recreate the Pinus radiata pine forests being used to teach the course: The environment, shown in Figure 1, is styled to represent Mt Gambier plantation pine forests, leveraging a Pinus sylvestris model, Australian vegetation, and related forestry accoutrement, including log stacks, work trucks, a firetruck, and a harvester. A screenshot of the forest environment.
The lesson comprises a series of scenes completed in a linear order, as outlined in Table 2. Each scene starts with the users in a primary lesson area, with content arranged around them in a semicircle, shown in Figure 2. Relevant text, diagrams, images, and other lesson content are presented in this fashion to convey the appropriate information for that specific scene. The rightmost side of every scene of every lesson area contains a progress indicator, which the student can use to trigger the transition to the next scene. The typical layout of objects in each scene, wherein each object is accessible without teleportation.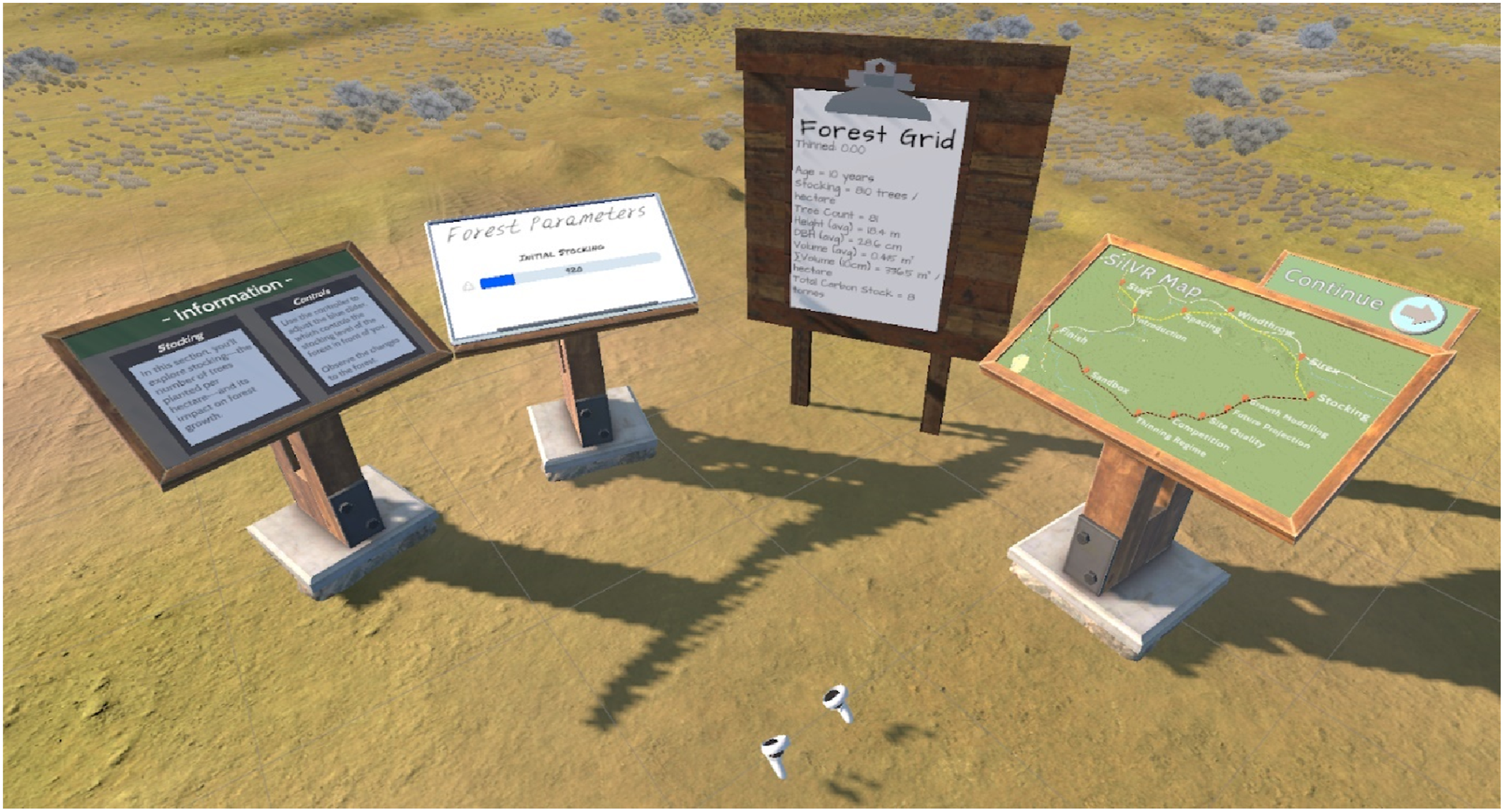
Diegetic vs Non-Diegetic Components
Information presentation, lesson progress, and growth modelling components within SilVR are each presented in diegetic and non-diegetic variants.
The diegetic variant of each component, illustrated in Figures 2(a) and 2(c), is designed to be cohesive with the forest lesson environment. Information is given on signage styled after national park signs and whiteboards, with images and figures displayed on easels. The growth modelling information is displayed on a workbench, and data is displayed on clipboards. The components are designed to be as diegetic as possible, making the elements feel like cohesive parts of the scene.
The non-diegetic version of these components, illustrated in Figures 3(b) and 3(d), is instead designed to be separate from the forest environment, in such a way that signifies that they are the relevant additional parts of the lesson. Information is presented in transparent, floating text boxes, a typical modern VR UI element. Images are suspended in space, and growth modelling information is presented as an abstract plot, with data displayed in floating text boxes. Lesson components used in SilVR, showing an information board in (a) diegetic and (b) non-diegetic variants, and images and figures in (c) diegetic and (d) non-diegetic variants.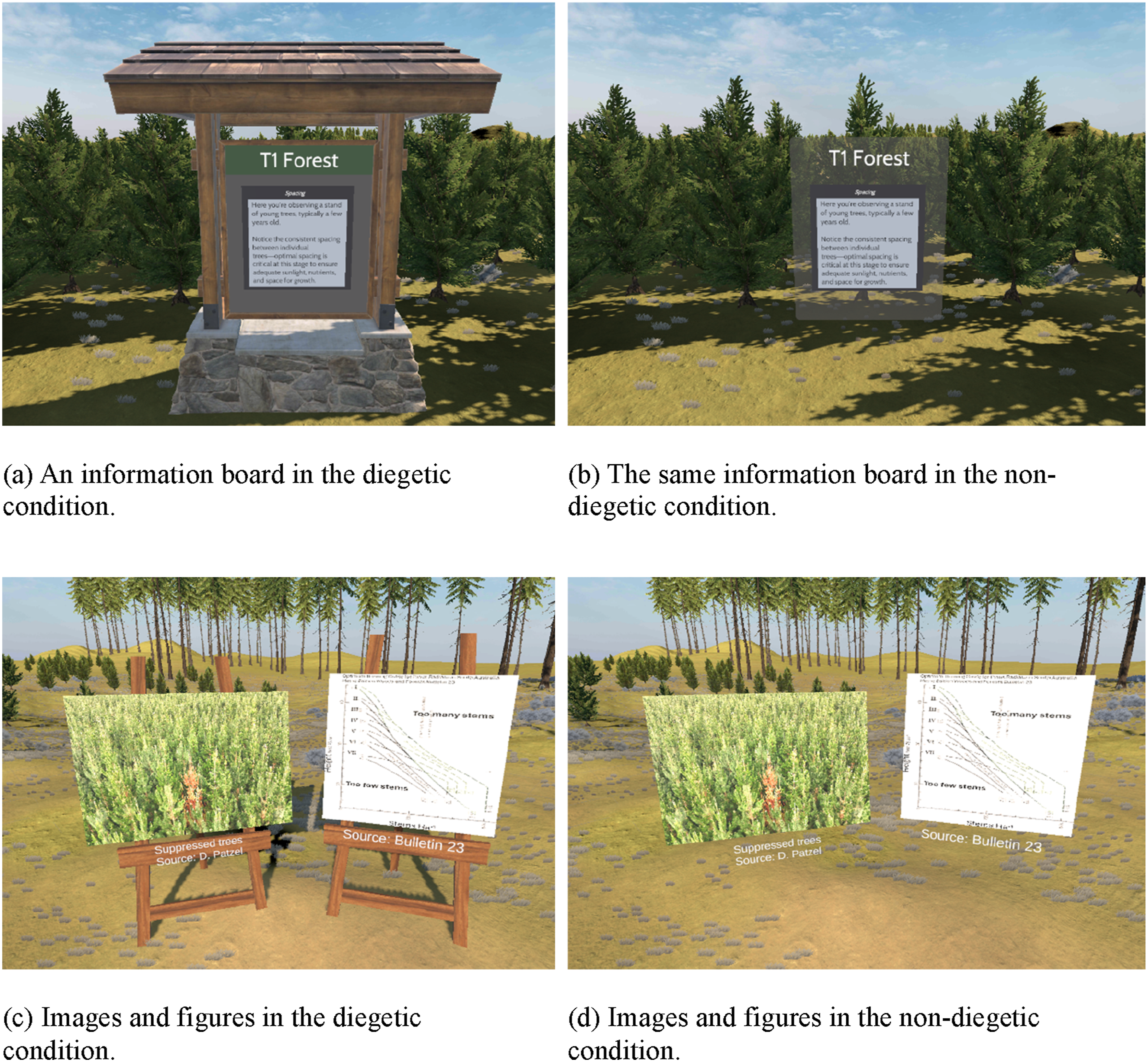
System Interaction
Each scene contains a lesson map, shown in Figure 4, which doubles as a progress indicator. Some scenes utilise interactive elements, such as manipulable objects and buttons that trigger animations. Scenes have no time limit, and students choose to progress when they are comfortable with the content covered in a given scene. The lesson map as it appears in the (a) diegetic and (b) non-diegetic conditions.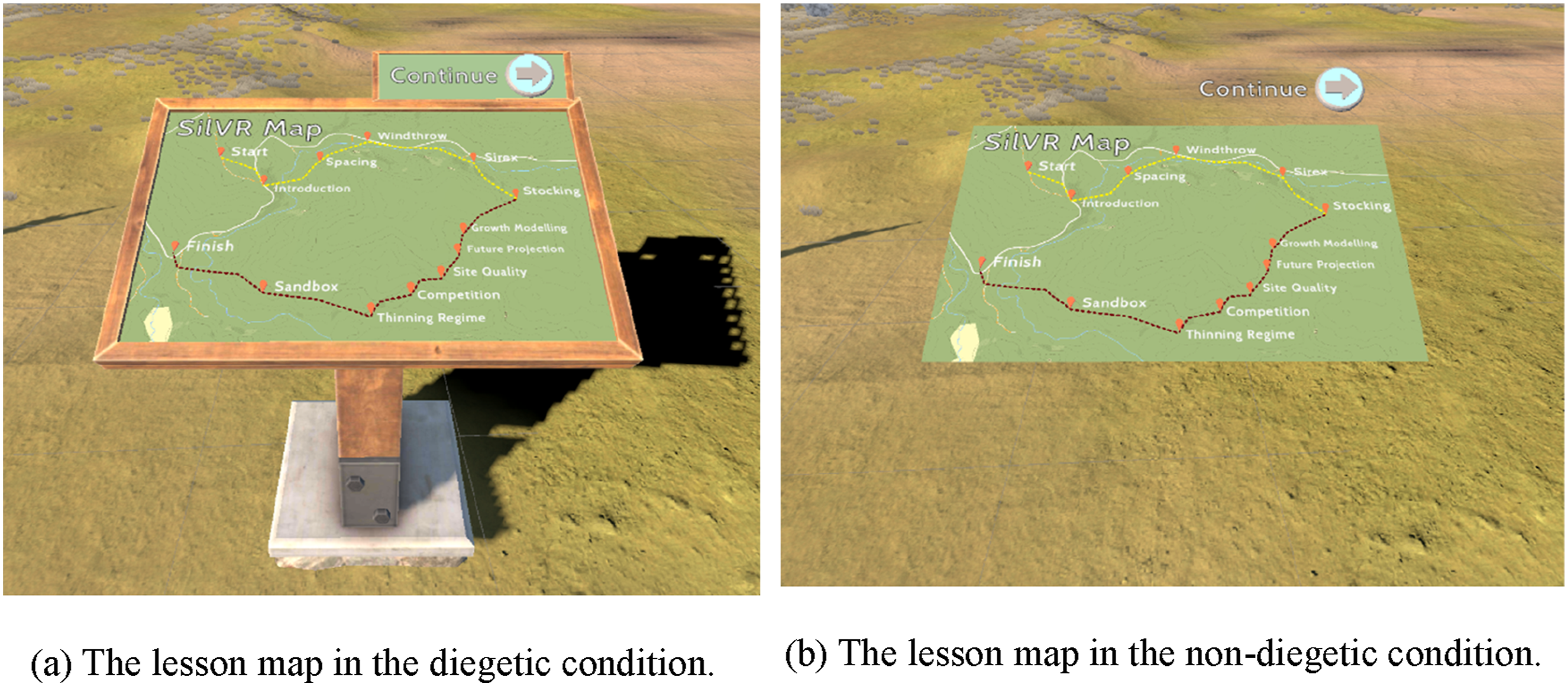
To accommodate users unfamiliar with VR, no complex interactions or button behaviour are required to progress through the scene. Demonstration videos were provided to teach users how to interact with buttons using the trigger and how to teleport through the scene. To maximise accessibility and reduce cognitive load for new users, teleportation was not required to complete the lesson and could be disregarded by users if they found it too complex.
Tree Growth Modelling
SilVR requires a tree growth model to support the interactive elements of simulation based training. To provide accurate data for simulation, we leverage existing datasets to set up a stand-based yield table generator as the basis for growth modelling in the system. Such a dataset is available in Bulletin 23 (Lewis et al., 1976), from a report on yield regulation in South Australian radiata pine plantations, which is our target domain. Our model uses site quality, age, and stocking to establish an initial forest state, generating a matrix of trees based on a noise factor. This matrix is then used to determine an initial plot volume at age 10. Tree volume increment in subsequent years can be estimated using a mathematical yield prediction model, such as in Leech (Leech, 1978). Volume is adjusted for stand density to account for the Langsaeter Plateau (the relationship between stand density and sustainable volume growth). The resulting growth increment for each tree is calculated as an inverse proportion of its volume relative to the plot: Competition is simulated by taking the local plot density around each tree and suppressing growth proportional to local competition. The resulting volume increment is applied based on each tree’s calculated growth level on a yearly basis, repeating the growth increment annually until the target year is reached.
This model can take a forest at a given state and project the growth of each tree forward under different silvicultural regimes while retaining an accurate simulation of growth curve behaviour. This is the basis of the model used to generate the growth model outputs used in SilVR.
Interacting With the Growth Model
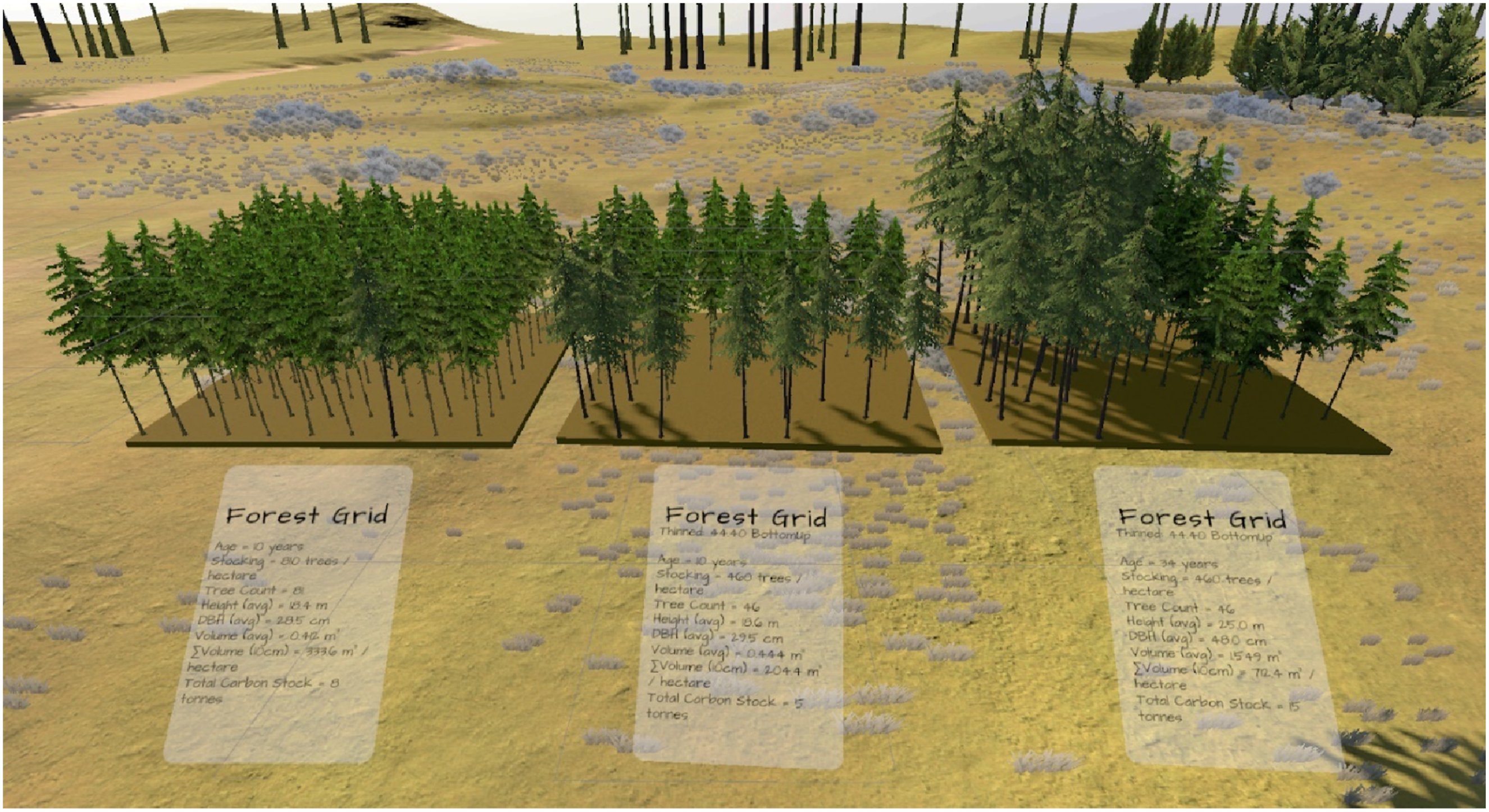
The state of the growth model is represented in the form of a miniature forest plot, shown in Figure 5, designed to be reminiscent of seedlings on a gardener’s workbench. This plot represents a ∼5% subset of a virtual forest grown with a set of controllable parameters. The scale of each tree is informed by its predicted growth at the given year, influenced by site quality and simulated competition. When a regime is supplied, two ‘future prediction’ plots are displayed alongside the sandbox plot, shown in Figure 6. The first shows the state of the forest post-operation, and the second shows the resulting predicted growth of the forest at a specified future year. The growth modelling visualisation used in SilVR, showing (a) diegetic and (b) non-diegetic variants. A future forest plot under a supplied thinning regime (in the non-diegetic condition), showing the base forest (left), post-operation forest (middle), and resulting future forest (right), each with updated silviculture data.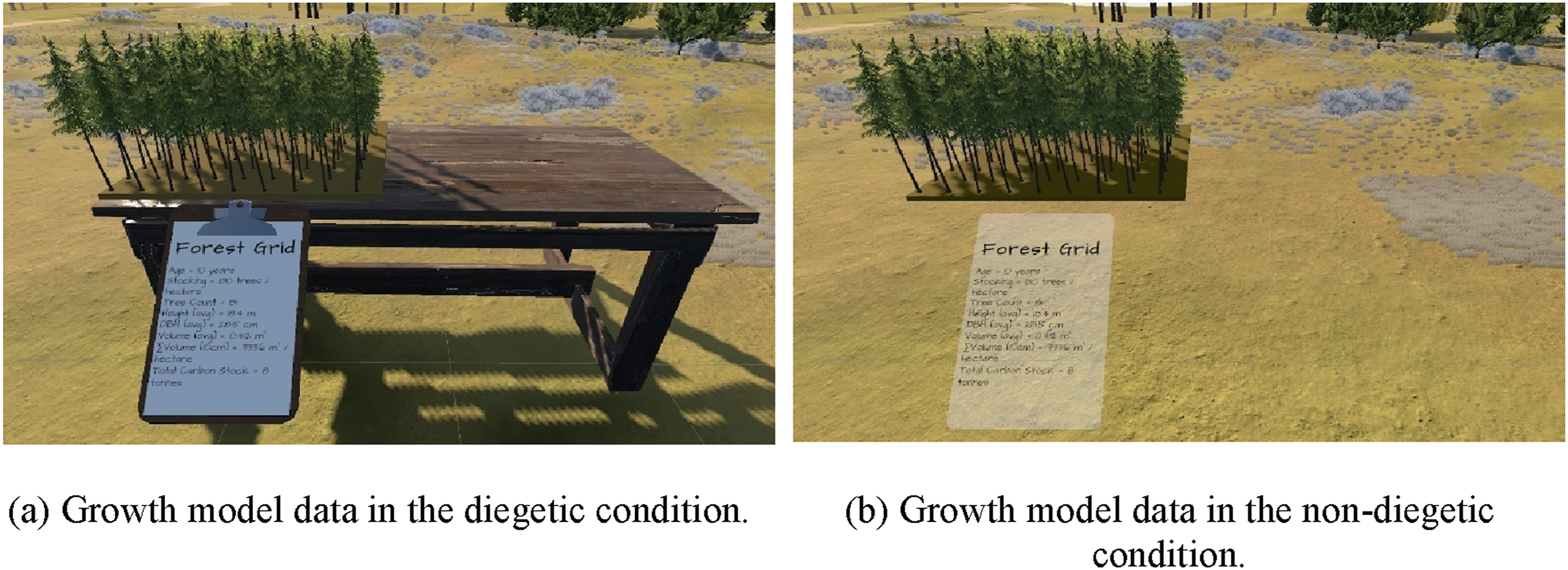
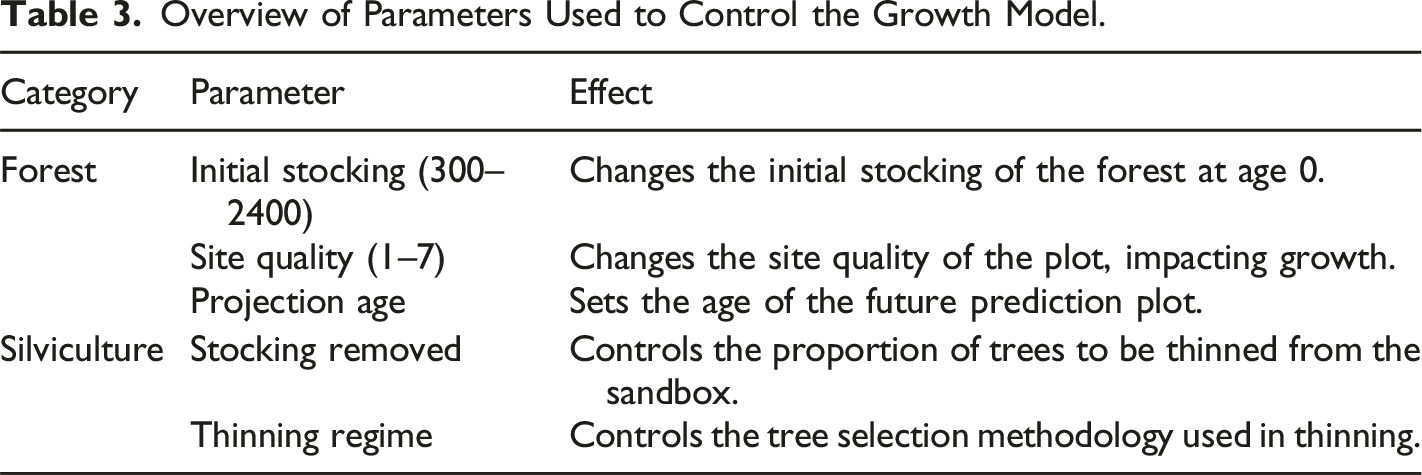
Users are presented with these plots with a set of interactive parameter control sliders, illustrated in Figure 7. Aspects of the silviculture regime can be modified by users at various stages of the experience. A full list of interactive parameters is outlined in Table 3. The control panels used to interact with the growth model system, showing (a) diegetic and (b) non-diegetic variants. Overview of Parameters Used to Control the Growth Model.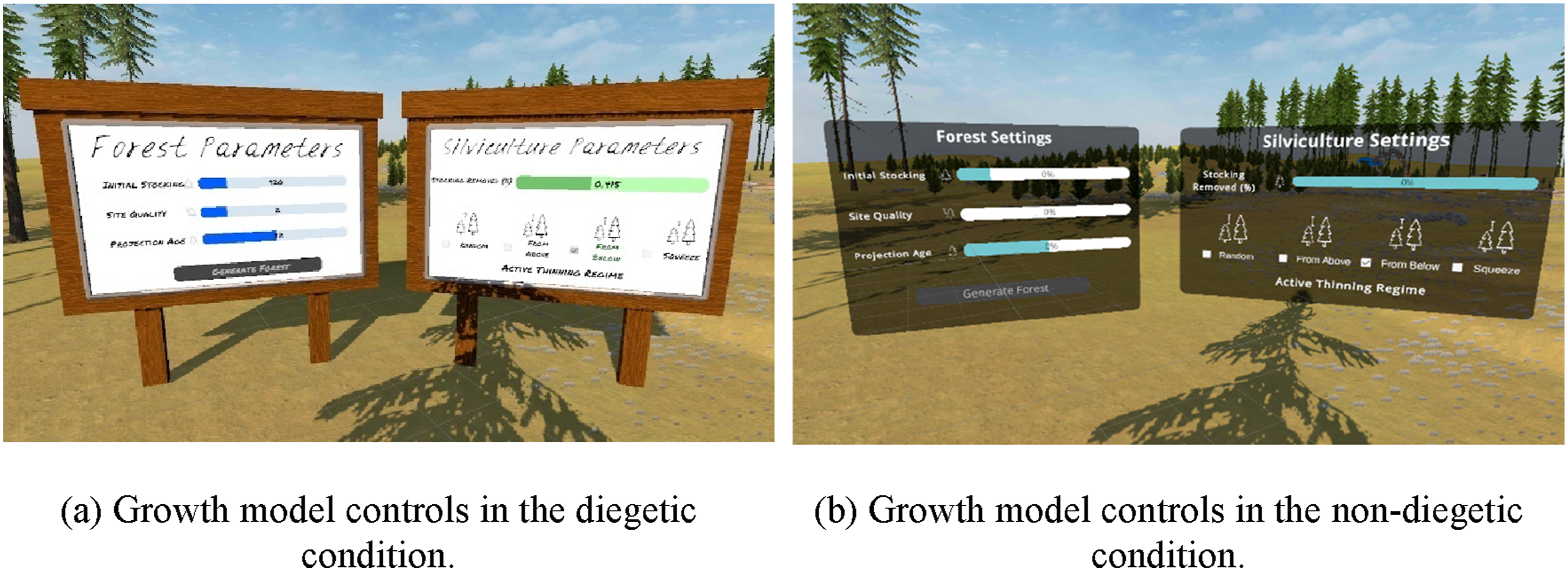
As users adjust silviculture parameters, changes are reflected in real time on the forest plot. For example, as users change the ‘Stocking Removed’ value, the action is applied to the sandbox plot, removing an equivalent proportion of trees, and updating the future prediction plot to reflect the resulting impact on future growth. Plot-level statistics are calculated and updated in real-time to illustrate the impacts of different thinning regimes. Users can also modify forest parameters and generate a new starting forest to serve as the sandbox base, enabling them to explore the impact of various interventions on different types of forests. This implementation is designed to encourage free-form experimentation and exploration, allowing users to compare and contrast different strategies to assess their own understanding of the factors that impact forest growth.
Study Methodology
This quasi-experimental study employed a baseline-intervention design to measure differences in knowledge retention between expert individuals completing diegetic and non-diegetic versions of our VR silviculture lesson intervention (SilVR). We utilised applied in-the-wild experimentation, where the intervention is tested in a real-world teaching setting with domain students to ensure the relevance and applicability of our results.
Hypotheses
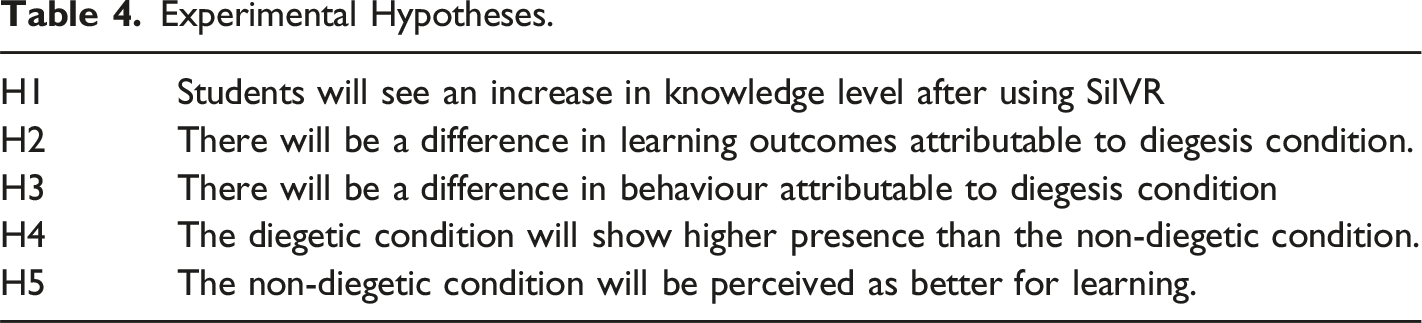
Experimental Hypotheses.
Participants
The sample consisted of 19 students enrolled in an executive certificate in plantation silviculture. The cohort represented a diverse group comprised of industry professionals seeking to transition into silviculture roles and existing professionals in forestry and related fields aiming to enhance their knowledge and skills. Participation was voluntary, and all participants provided written informed consent before participation for their anonymised results to be analysed and shared. The study design was approved by the University Human Research Ethics Committee (project number: 207053).
Research Protocol
To assess student knowledge level, we utilised a ten-question knowledge level questionnaire. We wrote two variants of each question to counteract any learning effect, and counterbalanced the order in which the sets were completed.
One week before the intervention, participants were asked to complete the first instance of the knowledge assessment to establish the baseline dataset. During the intervention, students were briefed on what to expect in the experience and how to launch the application, then invited to complete the lesson at their own pace. Half the students completed the diegetic condition, and half the non-diegetic condition. Quantitative participant behaviour metrics were automatically logged by the VR headset throughout the experiment. Immediately after the intervention, participants were asked to complete a qualitative feedback survey and a post-intervention instance of the knowledge assessment. Participants were also briefed on the differences between conditions, and asked to complete a short preference questionnaire. Qualitative feedback from the three facilitators present for the study was collected through an informal, semi-structured interview conducted after the study concluded.
Measures
• Knowledge Retention - The cumulative score (out of ten) for performance on the knowledge level questionnaire, conducted before and after intervention. • Student Behaviour - Logged behaviour statistics from the VR headset (button use, button type, slider use, slider time, average scene time). • Presence - Participant reported presence measure (Slater & Wilbur, 1997). • Intrinsic Motivation Inventory (IMI) - Participant reported IMI measures of Competence, Interest/Enjoyment, Effort/Importance, Value/Usefulness (McAuley et al., 1989). • Preference - Participant rankings of the diegetic and non-diegetic condition for perceived engagement, learning, and personal preference. • Recall - Participant recollection of which condition they completed. • Feedback - Qualitative feedback from the students and facilitators throughout and after the study.
Statistical Analyses
All analyses were conducted in R version 4.2.2 (RStudio Team, 2020). Where appropriate, statistical significance was set at α = 0.05.
Knowledge Retention
We analysed the effects of Phase (before vs after intervention) and Condition (diegetic vs non-diegetic) on the adjusted scores using a linear mixed-effects model. Specifically, we specified Phase, Condition and their interaction (Phase x Condition) as fixed effects, with Participant ID included as a random intercept to account for variation across students’ aptitude and baseline understanding. The model was fitted using the lmer() function from the lme4 package in R (Bates et al., 2015, p. 4).
To explore pairwise comparisons of phases across each condition, we used estimated marginal means (EMMs) derived from the fitted model. EMMs were calculated using the emmeans package (Lenth, 2024) with contrasts estimated between phases within each condition to facilitate post hoc comparisons.
Student Behaviour
To account for the breadth of participant skill levels, we elected to remove outliers beyond 1.5 x IQR from the median. We first assessed the data for normality within groups using the Shapiro-Wilk test, and evaluated homogeneity of variances across groups using Levene’s test. Where we found normality within groups, we employed parametric tests, using the Student's t-test when variances were equal or Welch’s t-test when variances were unequal. Where we did not find normality, we employed the non-parametric Mann-Whitney U test. Each test was employed using the rstatix package (Kassambara, 2023).
Subjective Measures
To assess qualitative feedback metrics, we utilised the same statistical analysis methodology as in the Experiment Behaviour section. We compared the distributions of participant preferences between participants who completed each condition (diegetic vs non-diegetic) for the individual preference queries. For each category, we used Fisher’s Exact Test to assess differences between conditions.
Qualitative Analysis
For the open-ended feedback questions, we employed a qualitative thematic analysis approach. Responses from participants and facilitators were collated and reviewed for recurring topics, with emblematic comments highlighted. No formal statistical tests were applied to these qualitative responses.
Results
Knowledge Retention
We observed a significant main effect of Condition (b = −99.77, SE = 38.66, t(22.94) = −2.58, p = 0.017) on resulting knowledge level at each phase, indicating that there was a difference in knowledge level attributable to having completed the intervention. We observed an interaction effect between Phase and Condition (b = 73.38, SE = 29.10, t(16.40) = 2.25, p = 0.022), suggesting that the effect of phase on knowledge level depended on condition.
Figure 8 illustrates the estimated knowledge level across phases for each condition. In the diegetic condition, estimated knowledge level was consistent across phases. In contrast, the non-diegetic showed a marked increase between phases. Change in estimated knowledge level between baseline and intervention phases.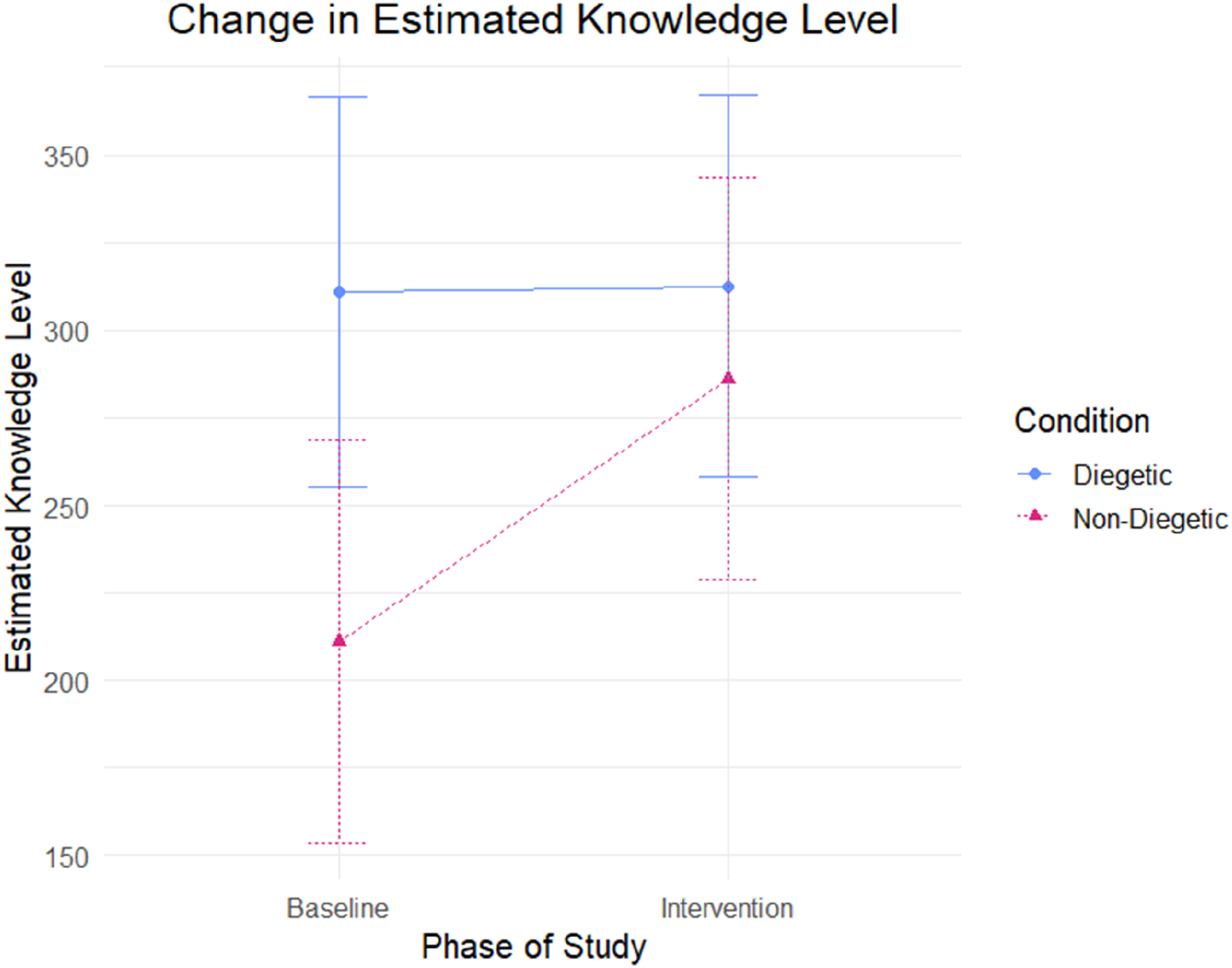
Student Behaviour
Results from analyses of participant intervention behaviour across conditions are illustrated in Figure 9. Boxplots of participant behaviour metrics across conditions.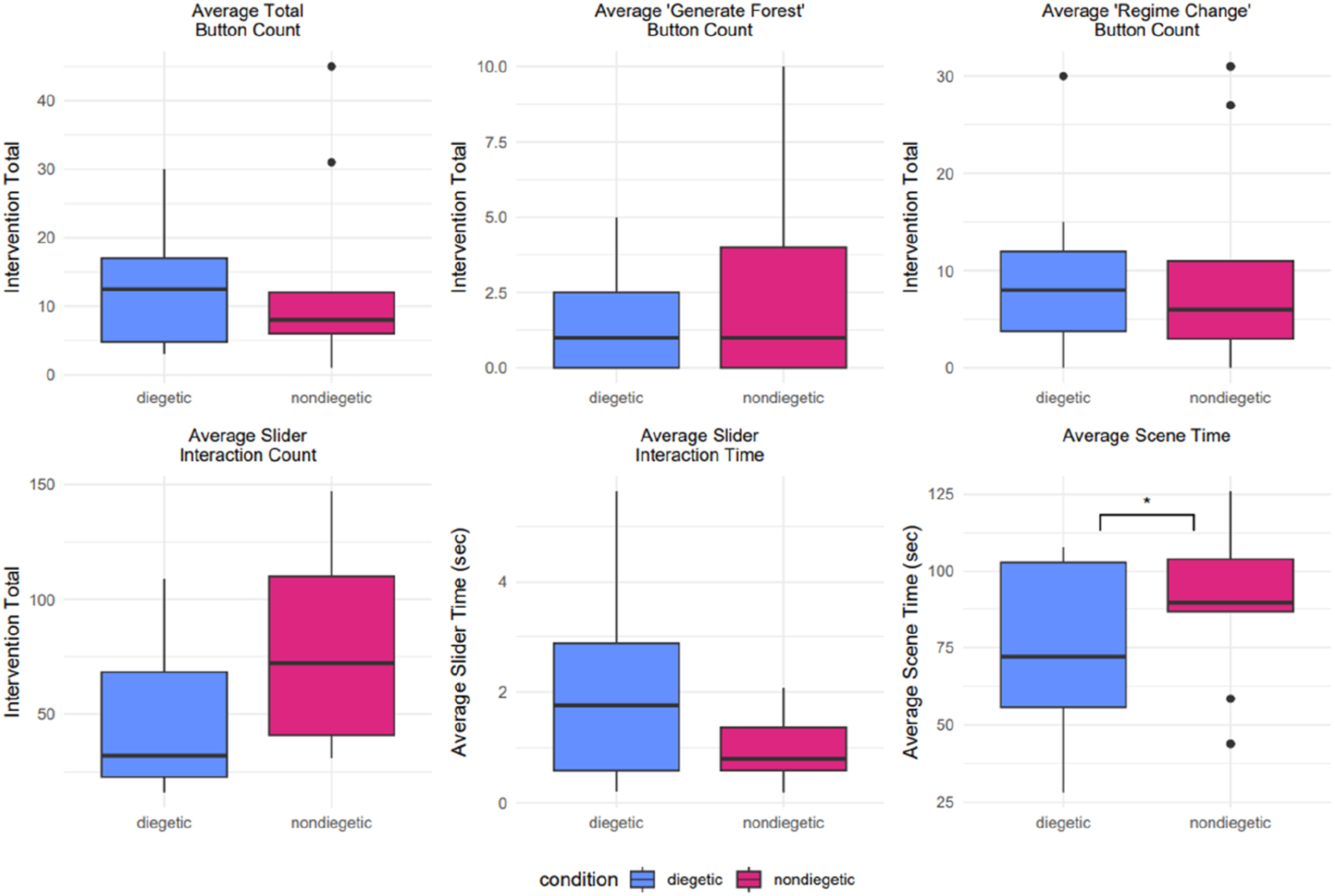
We observed a statistically significant difference in average scene time across conditions (t (13.7) = −2.51, p = .025). Participants in the diegetic condition (M = 74.3, SD = 28.5) were significantly faster than those in the non-diegetic condition (M = 89.5, SD = 25.0). We observed no statistically significant difference across conditions for the button or slider interaction metrics.
Subjective Results
Results from participant feedback metrics are illustrated in Figure 10. Results from the participant subjective feedback questionnaire.
Presence
We observed no statistically significant difference in presence between students who completed the diegetic and non-diegetic conditions (t(14) = 0.522, p = 0.610).
Intrinsic Motivation Inventory
For the Intrinsic Motivation Inventory, we found no significant difference in perceived competence (t(17) = 0.572, p = 0.576), value/usefulness (t(17) = −1.31, p = 0.209), interest/enjoyment (t(17) = 0.136, p = 0.893) or effort/importance (W = 48, p = 0.837) between students who completed the diegetic and non-diegetic conditions.
Preference
Overall results from participant preference questionnaires are illustrated in Figure 11. Results of preference questionnaire, grouped by which condition participants completed.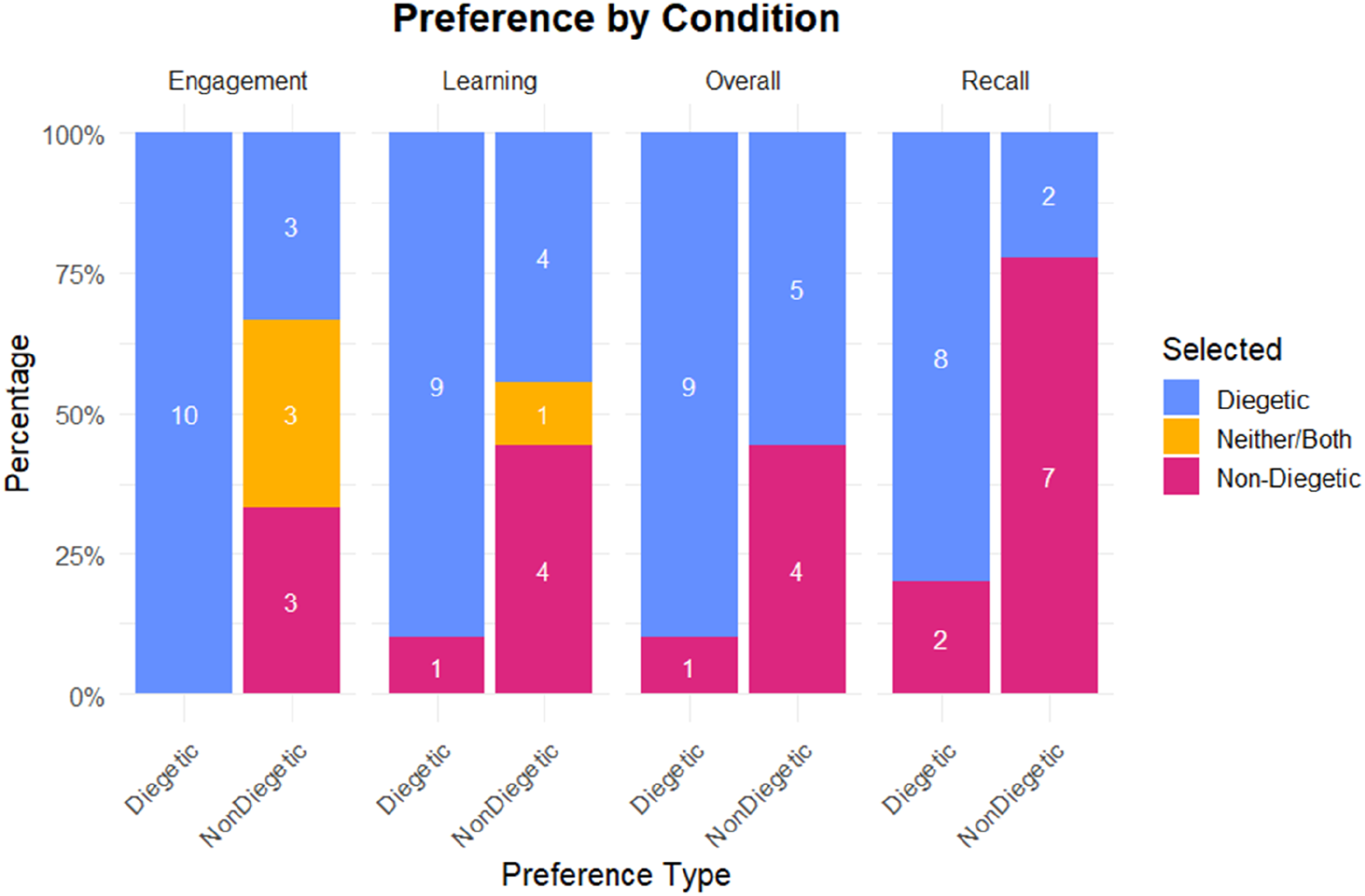
We observed a statistically significant difference (p = 0.003) between participant condition and preferred condition for engagement, with the entire population of participants who completed the diegetic condition (n = 10) preferring that condition as the more engaging option, compared to a mix of preferences from participants completing the non-diegetic condition (n = 3,3,3).
Despite a preference towards diegetic across conditions in the learning category, we did not observe a statistically significant difference in this category (p = 0.071).
Likewise, despite a trend towards the diegetic condition for the overall preference category, we did not observe a statistically significant difference here either (p = 0.141).
In both conditions, we observed a small number (n = 2) of participants who incorrectly recalled which condition they completed.
Qualitative Feedback
Participants generally reported that VR enhanced their ability to visualise or grasp concepts compared to traditional teaching methods, with a large subset simply stating “it worked well” (n = 7). Participants appreciated the interactive elements, noting that the ability to change parameters and visualise their impacts was helpful (P16), and a “more handson experience helped” (P3). Participants reported that the intervention “helped quite a lot to actually visualise the changes’ (P10) and found it “interesting to see the difference in real time” (P17).
Compared to traditional learning, it was noted that VR worked “very well - compared to both typical theoretical learning and in the forest learning, I found this a very useful tool for visualising forest changes” (P2). Some participants highlighted that the tool was “fun [and] interactive” (P10), with some mentioning that the novelty of the intervention could be distracting (“distracted by the fun of the tech” (P13)) and that the linear structure meant that there was “better ability to explore, less ability to focus on specific topics” (P19). One participant felt there was no difference between VR and traditional teaching methods (P5), and another noted “it was my first experience with VR [so] it would take me a while to get used to it. Once I was experienced with using it I think it could be a good visual learning tool” (P7). Overall, participants suggested that VR has potential as a valuable complementary tool for teaching silviculture, especially when integrated with traditional teaching methods and with more experience using the technology.
When asked to comment on what they liked most about the intervention, participant feedback emphasised a range of themes. Four participants highlighted the novelty of the experience as their favourite element. Other participants noted that the experience was visually interesting (n = 1), simple to navigate (n = 1), and felt highly detailed (n = 5), with one participant commenting that “it felt [as] real [as] possible for VR” (P11). Eight participants elected the interactive or exploratory nature of the experience to be their favourite factor, particularly the ability to adjust inputs and see immediate effects. One participant highlighted the ‘instant feedback’ as their favourite component. Three participants highlighted the sense of immersion in the forest as their favourite aspect, with one commenting “[it was] very immersive, the interactive nature of the experience enhanced by learning” (P2).
When asked to comment on aspects they disliked, seven participants indicated they liked every aspect of the experience. Three participants reported that it was easy to get distracted by the technology itself. Two participants experienced disorientation, while another noted unusual behaviour in the growth model itself. Two participants expressed unfamiliarity with VR (“being very new it took me a little while to get used to what was happening” (P2)). Additional issues included blurry text, discomfort from glasses in the headset, unawareness of the surroundings, and clunky interaction (specifically with the controllers (n = 1) and teleportation (n = 1)). One participant simply commented that it “would be better to have more” (P12).
When asked for suggestions for improvements, eight participants indicated they had no recommendations. Other participants suggested having more time to explore the experience, a more “free-flowing” structure with less “stop starting” (P3), and additional time for familiarisation before the content began or a more explicit tutorial (n = 2). Some participants expressed a desire to revisit certain scenes or add audio narration to the text.
Some feedback related to the fidelity of the experience and growth model. One participant requested more “reality” in the forest environment (P13), while another requested higher complexity in the growth model, such as adding spacing, fertilising, cultivation, weeds, and thinning (P14). Additional suggestions included incorporating a pine scented air freshener (P1), more content (“more videos on silviculture practices” (P18)), and even specific ideas for scenes (“when in t1 plantation, [the] whole row could be removed and trees in bays. Would be [cool] to be able to stand in the plantation and see the difference at each thinning age” (P16).
When asked whether they would like to use VR more in educational contexts, the majority of participants expressed strong interest, with reasons including its ability to help visualise and understand concepts (n = 4), its immersive nature (n = 11), and its potential to enhance education (n = 2; “like moving from blackboards to smart boards” (P9)). Additional positive responses highlighted the potential for up skilling the community in complex topics (n = 1), opportunities for outreach (n = 1), the capacity for interactive demonstrative environments (n = 1), offering a different experience from traditional education (n = 1), enjoyment (n = 1), and interactive learning (“as someone who learns through “doing” I think this is very helpful” (P17)).
A minority of participants expressed reservations, noting that VR might be valuable, but not frequently (n = 2), that it was unnecessary given their existing field exposure (P1), and that they were comfortable with traditional learning methods (P16), or that they preferred real field visits (P5).
Observations
Facilitators noted that they needed to intervene for students getting lost in the T1 Forest scene, necessitating that they take the headset and manually set the position themselves. It was suggested that a position indicator, or a manual position reset command, would be advantageous for presenting the content effectively. Facilitators commented on users having a relatively easy adaption time into VR as a result of the initial AR view used when selecting the application from the main menu, however some students required additional guidance on navigating through scenes and using the map boards. Students commonly wanted to revisit previous scenes, which was precluded by the lesson design. Some students did not click the final ‘finish’ button in the final scene, which was responsible for the loss of some timing data. They instead removed the headset once they entered the last scene, which necessitated restarting the headset before the next user. Sentiment among the participants was positive about the use of the software, and discussion after use of the software in the room centred on the lesson content, rather than on the novelty of the VR. It was noted that no users withdrew from the study; every student completed it to its conclusion.
Discussion
Learning Outcomes
We observed a significant difference in knowledge level before and after the intervention, as evidenced by the results of the linear mixed model. From this, we can conclude that students were able to increase their knowledge level through the use of the SilVR intervention, supporting H1.
We observed an interaction effect between phase and diegesis conditions, however students with high a priori knowledge were clustered in the diegetic condition, despite their random assignment. This imbalance is the likely explanation for the observed interaction effect, as the diegetic group’s high baseline scores limited measurable improvement, while the non-diegetic group’s lower starting point allowed for greater observed gains. The knowledge level increase in the diegetic condition is not attributable to a strength of the condition, but rather to the fact that the non-diegetic participants had more room for improvement from the baseline, rejecting H2.
Impact of Diegesis
We observed a statistically significant difference in average scene time, our indicator for time spent in the experience, confirming H3. Students in the diegetic condition progressed significantly faster through each scene, spending less time engaging with the content. This speed did not preclude them from learning, as students in the non-diegetic condition were able to bring their knowledge level to within the same range as the diegetic condition. This suggests that the presentation of diegetic information may reduce the time required to learn from VR educational content. One possible explanation is that diegetic interfaces more readily support a state of flow—marked by intuitive task engagement, time distortion, and immediate feedback—allowing learners to navigate and understand scenes without needing to consciously interpret interface elements (Akman & Çakır, 2019). This hypothesis would need to be tested through closer behavioural observation, such as using eye gaze data to assess the time spent in transition between learning states.
From our preference data, we observed a statistically significant difference in the engagement category, with significantly more students in both conditions perceiving the diegetic version as more engaging. This is perhaps due to the higher assumed immersion and presence from this condition, but our presence findings contradict this. We did not observe a statistically significant difference for the learning and overall preference categories, rejecting H5. Observing trends in the results, we expect that with a larger participant pool we may see substantive differences in these categories. There appeared to be an unusual difference in preference between conditions. Participants who completed the non-diegetic condition were split relatively evenly on whether they felt it would be a better choice. Contrastingly, all but one participant from the diegetic cohort elected it as a favourite across every category. In other words, participants whose interface matched the world environment were significantly more favourable towards that condition in feedback. It suggests that there are advantages beyond the perceived to the diegetic condition which are understood by experiencing the condition, hence the resulting preference distribution.
We found no difference in the assessed elements within the Intrinsic Motivation Inventory. Students felt equally competent in both conditions. They reported the same feelings of effort and importance across the conditions. The level of interest and enjoyment was almost identical. There was also no difference in perceived value and usefulness across conditions. However, for the non-diegetic condition, value and usefulness trended higher and perceived competence trended lower despite participants in this condition having less to learn. Across SilVR as a whole, students reported high ratings for all of these categories, showing an overall very positive attitude towards the lesson through these metrics.
We observed no difference in self-reported level of presence, rejecting H4. We had expected that the presence of diegetic information presentation elements would create a higher sense of presence, anticipating a possible disconnect between the non-diegetic elements and the diegetic environment around them. However, the design of the environment, being a realistic forest, potentially overruled any possible presence penalty from non-diegetic information presentation. As such, it appears to be possible to use non-diegetic elements in an otherwise immersive VR scene without a penalty to presence, relative to the equivalent diegetic elements.
Feedback
Participant feedback suggests that VR has clear potential as a complementary tool in silviculture education, particularly in enhancing learners’ conceptual understanding of complex systems and engaging them. A majority of participants reported that the immersive and interactive elements of the intervention helped them to better visualise forest dynamics. These qualitative insights indicate learning benefits that were not fully captured by the general knowledge test, highlighting the value of including complementary measures alongside quantitative assessments. The novelty of the technology was frequently noted as a positive aspect, with participants highlighting enjoyment, interactivity, and the ability to explore and experiment as key strengths. However, some also noted that this novelty could be distracting, especially for first-time users of VR. A key theme across responses was the value of real-time visual feedback. Participants appreciated the ability to see the effects of their actions in real-time, suggesting that simulation-based feedback loops can be an effective pedagogical strategy in VR silviculture contexts.
At the same time, the limitations of the experience were also made clear. Several participants reported issues related to discomfort. These responses highlighted the need for improved onboarding processes, including more time for familiarisation and potentially a structured tutorial before educational content begins. Additionally, the linear structure of the experience was noted as a constraint for advanced users, limiting self-directed exploration and topic focus. Designing for more flexible content delivery could enhance the experience for advanced users, but until the technology becomes part of the educational practice, there will always be a need for content tailored to users of all skill levels.
Participant responses reflected a broad range of perspectives on the role of VR in education. While many expressed enthusiasm for using VR more frequently—highlighting the value of visualisation and instant feedback—others instead focused on its capacity as a tool for outreach and engagement. Some participants found it especially helpful for understanding complex processes, while others expressed a preference for more traditional methods. A subset of participants expressed a preference for classroom and field-based approaches, a reminder to reflect the diversity of learner needs, and the importance of offering VR as a complementary rather than exclusive tool.
Taken together, these findings suggest that VR holds significant promise as a teaching tool in forestry education, but also underscore the importance of iterative design, user-centred refinement and thoughtful integration of existing pedagogical structures. While our study focused specifically on diegesis in information display, participant feedback suggests a broader design space encompassing interaction design, environmental realism, content structure, and learning support mechanisms. Future work should explore these factors more holistically and in relation to specific learning outcomes.
Limitations and Future Work
This study faced several limitations related to the effects of knowledge retention. Conducted at the end of a week of field trips, the study was affected by participant fatigue, particularly during the post-intervention knowledge assessment which followed an extensive experience questionnaire. The general knowledge questions were written around the silviculture course content, rather than the aspects of silviculture particularly applicable to VR, making them a better indicator of general course understanding than of the intervention’s impact. Working with experienced students introduced variability of baseline knowledge into the study, but it yielded valuable insights into applied VR for education. Future iterations should incorporate more carefully designed questions, an improved data collection protocol, and manually balance group assignments based on experience level to strengthen quantitative analysis. Using students with no a priori knowledge of forestry would improve experimental control. A future iteration of the system will explore forest health interactions in forest stands.
Conclusion
This study set out to evaluate the utility of SilVR, a novel VR training tool designed to support silviculture education by translating complex forest growth modelling dynamics into an interactive experimental sandbox, leveraging the educational affordances of VR.
Despite the limitations of measurement, participants demonstrated measurable gains in knowledge following the intervention, confirming that SilVR supported the learning of silviculture concepts. Additionally, we found that diegesis appeared to influence behaviour. Participants in the diegetic condition progressed through scenes significantly faster than those in the non-diegetic group, suggesting that embedding lesson content into the scene may facilitate more intuitive engagement. These participants also exhibited different preference behaviour, hinting at advantages in diegetic presentation that are yet to be uncovered. Despite expectations, there appeared to be no significant difference in measures of presence, competence, effort, interest or values between conditions.
Qualitative feedback from both students and facilitators highlighted the strengths of the intervention---particularly its immersive nature, real-time feedback, and interactivity---as well as areas for improvement. Participants appreciated the ability to explore the impacts of silvicultural variables with feedback that was instant, instead of over decades. They also suggested several possible enhancements, including improved onboarding, scene re-visitation, additional narration, and increased realism and complexity. Facilitators emphasised the importance of supporting users in navigating scenes and streamlining technical barriers.
As VR becomes more prominent in experimental learning interventions, understanding how different presentation methods influence engagement and learning is important to maximise educational value. Our findings suggest that diegetic interfaces may offer advantages in perceived engagement and intuitive interaction, making them a compelling design philosophy for VR-based education tools.
Footnotes
Acknowledgements
The authors would like to acknowledge the student cohort in the University of Tasmania’s Graduate Certificate in Forestry. The course is supported by Australian Forest Products Association, Forest Works and the forest companies Forestry Corporation, HQPlantations, HVP Plantations, Sustainable Timber Tasmania, Forico, AKD, OneFortyOne, New Forests, PF Olsen, Timberlands Pacific. The authors wish to acknowledge the Green Triangle Forest Industries Hub for access to facilities and equipment used during the study.
Declaration of Conflicting Interests
The authors declare that there is no conflict of interest.
Funding
Informed Consent
This research was conducted following the ethics protocol outlined and approved by the University of South Australia’s Human Research Ethic Committee (Project Number: 207053). Participants provided written informed consent prior to the study and were informed their data would be used anonymously for research purposes.