
Abstract
This paper presents an intelligent modified predictive control approach with squeezed search space, for tracking control of piezo-actuated nano stage. The model obtained from the gray box neural network is first dynamically linearized to avoid calculation of inverse hysteresis model. The optimum control values of the previous control cycle are used to construct a squeezed search space, which reduces the computation burden and improves the tracking control performance. The effectiveness of the proposed scheme is verified theoretically by deriving a convergence analysis and by experimental results. The results show that the proposed approach significantly improves the dynamic tracking performance for high-frequency reference signals than existing results in the literature.
1. Introduction
Piezo-actuated (PZT) nano systems are being increasingly used in industry for nanopositioning (Al-Nadawi et al., 2021b) and tracking (Al-Nadawi et al., 2021a; Chowdhury et al., 2022) applications. But the critical challenge, in achieving the nano scale accuracy for these applications, is intrinsic hysteresis nonlinearity which reduces its tracking accuracy. Therefore significant research has been done on hysteresis modeling and control in recent past (Devasia et al., 2007).
Hysteresis models presented in literature can be classified into physics-based models and phenomenology-based models. Physics-based models have clear physical meaning but they usually have complex mathematical structure and high computational cost, for example, Preisach model (Nguyen et al., 2018), Prandtl-Ishlinskii (PI) model (Li et al., 2020), Maxwell model (Madsen et al., 2021). The problem with these models is their rate-independent nature that is, they can describe the hysteresis behavior for a fixed input frequency signal only. On the other hand, phenomenology-based models for example, Duhem model (Wang and Chen, 2017), Buce Wen (Wang et al., 2015) etc. have simple mathematical structure which makes them very popular in hysteresis modeling but their parameter identification is a complicated problem.
To control the effects of hysteresis, one of the predominant approach is using inverse hysteresis model as feedforward compensator (Li et al., 2019; Wang et al., 2014; Yang et al., 2021). Although the open loop feedforward compensation method shows reasonable control performance, the system’s robustness against external disturbances and modeling uncertainties still needs to be ensured. Therefore, the combination of feedback control loop with feedforward compensation is often presented in the literature Mao et al. (2018). Zhang and Yan (2021) presented a robust nano-positioning control scheme for systems with sensor delays. Recently some neural network based modeling methods are becoming popular due to their model identification properties. Elman neural network–based hysteresis model is presented in Zhao et al. (2020) and a dynamic hysteretic operator is used to handle the multivalued problem of hysteresis. To avoid computing inverse hysteresis model a neural network based adaptive controller scheme is presented in Zhao et al. (2021). Although the conventional neural network based modeling and control methods are proven to be effective but training time is too long which increases computation burden. Gray box neural network based model presented in Ahmed and Yan (2021) can describe the behavior hysteresis behavior of piezo-actuated nano stage with high precision and low computation burden. Due to its high performance and constraints handling abilities, Model Predictive Control (MPC) is widely used in industrial applications (Gong et al., 2016; Zhou et al., 2021). An inverse ferromagnetic material hysteresis compensation with MPC based feedback control is proposed in Cao et al. (2013) to control the piezo-actuated system.
Finding an inverse hysteresis model is a complicated task, particularly for high dynamic applications such as tracking. Therefore, Cheng et al. (2015) and Liu et al. (2015) presented MPC based tracking control scheme where inverse hysteresis model is no longer needed. In Cheng et al. (2015) Nonlinear AutoRegressive Moving Average with eXogenous input (NARMAX) based hysteresis model was proposed using neural networks and nonlinear MPC (NMPC) method was used to implement the tracking control, hence avoiding the calculation of inverse hysteresis model. A dynamically linearized neural network model along with MPC controller is presented in Liu et al. (2015). But in optimum control based schemes, the control law is obtained by solving a complex optimization problem during each control cycle, which slows down the control action, making it less suitable for high frequency tracking references.
This paper proposes a modified predictive control approach with squeezed search space supporting high dynamic tracking performance. To approximate the behavior of piezo-actuated nano stage, a gray box neural network based displacement predictor is proposed. The displacement predictor is linearized in each control cycle using dynamic linearization method to avoid inverse model for the compensation of nonlinearities such as hysteresis and creep. The modified predictive controller utilizes the optimal solution values of the previous control cycle to construct a new optimized search space during each control cycle. This can solve the slow convergence problem of the predictive controller. In addition to that, convergence analysis of modified predictive control scheme is presented, which guarantees a finite time convergence as well as the upper bound of the time of convergence under mild assumptions. Finally, to verify the effectiveness of the proposed scheme, experiments are conducted on the piezo-actuated nano stage.
2. System description and problem formulation
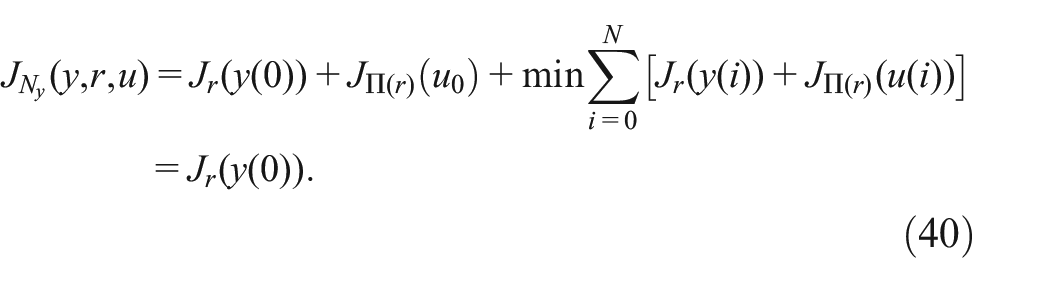
The high performance tracking control of piezo-driven nano systems, is a challenging task due to inherent nonlinearities such as rate-dependent hysteresis and creep. Experimental setup to excite the piezo-actuated X-Y nano stage is shown in Figure 1. The high bandwidth voltage amplifier is used to drive the piezo-actuated nano stage. The displacement of the nano stage is measured using MicroE systems Mercury II 6000 series linear encoder, with 1.2 nm resolution and maximum speed of 61 mm/s. NI-6259 data acquisition card is used to extract the displacement data from the linear encoder at the sampling rate of 20 kHz. The control signals are generated by Matlab Simulink/xPc Target. NI-6259 data acquisition card communicates between the host computer and the high bandwidth voltage amplifier. Figure 2 shows the response of the piezo-actuated nano stage against the 1 Hz triangular input signal with decreasing amplitude. It can be seen that nano-stage shows strong nonlinear hysteresis behavior. The static hysteresis behavior of the nano-stage increases with the increase in the amplitude of the input signals. Thus to implement tracking control, it is necessary to develop a model to describe the behavior of nano stage.
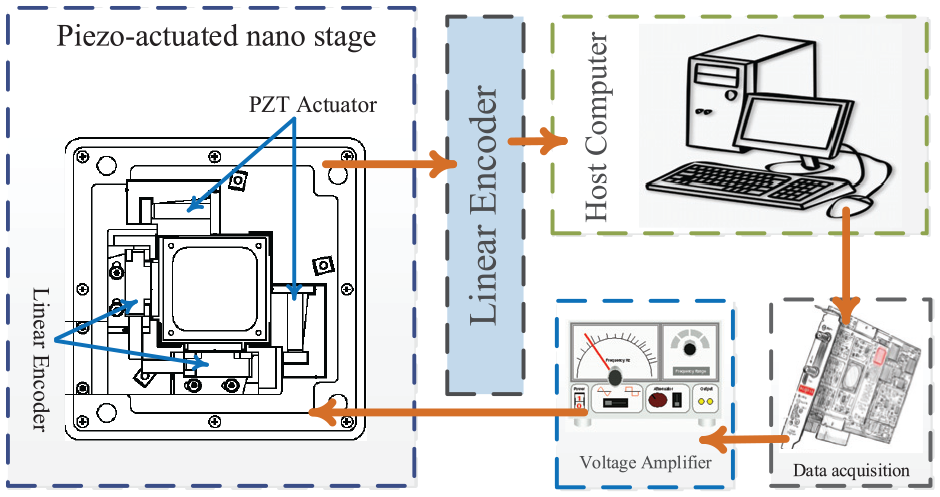
Experimental setup to collect input/output data from piezo-actuated nano stage.
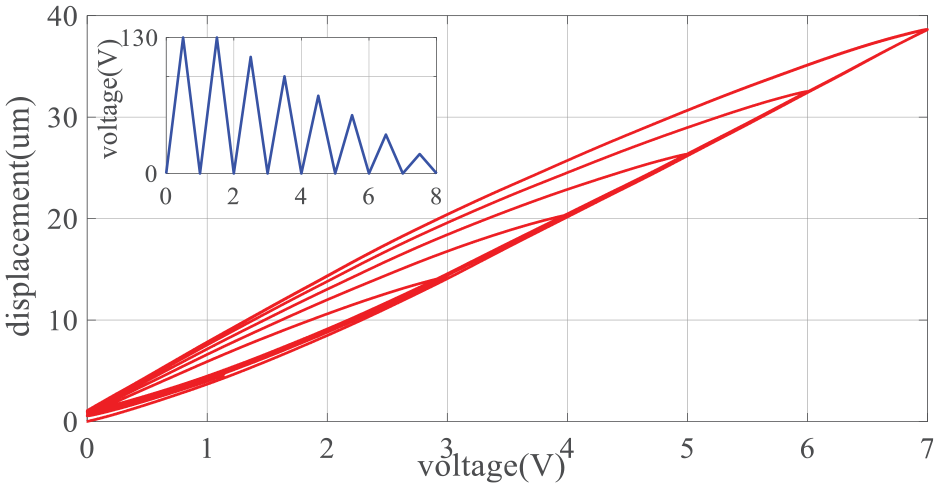
Hysteresis response of piezo-actuated nano stage using triangular input signal.
2.1. Neural network based model of piezo-actuated nano stage
The overall neural network model of the piezo-actuated nano stage is shown in Figure 3. The gray box neural network is used to model the quasi-static hysteresis behavior 3(a). The dynamic behavior of the piezo-actuated nano stage is described by NARMAX-based dynamic sub-model 3(b). For the gray box neural network-based static sub-model the displacement

or

where

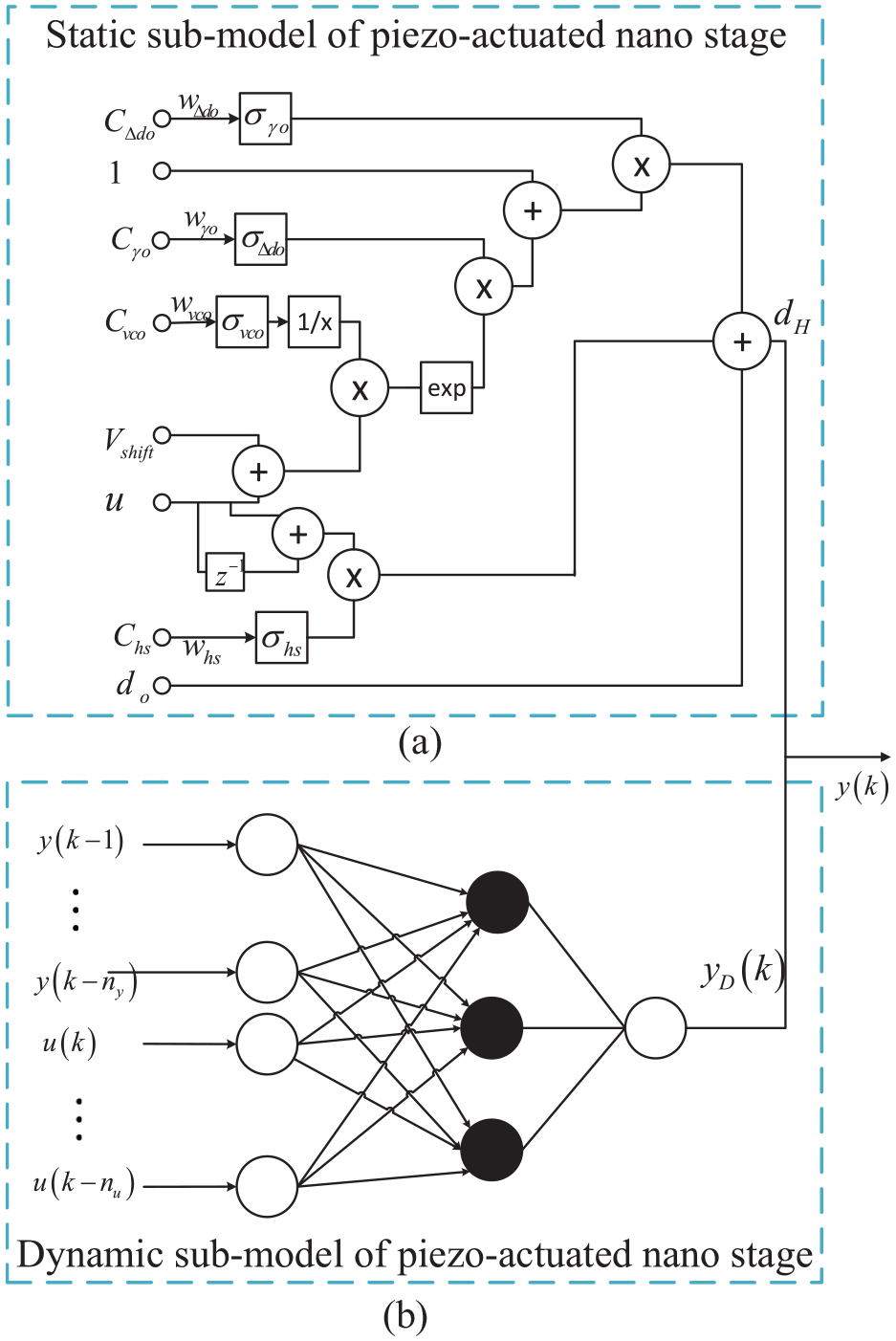
Neural network based model of piezo-actuated nano stage: (a) static sub model of piezo-actuated nano stage (Ahmed and Yan, 2021) and (b) dynamic sub-model of piezo-actuated nano stage.
To describe the dynamics of the system (Figure 3), NARMAX based dynamic sub-model, is defined as:

where

2.2. Dynamic linearization of neural network based model
Dynamical linearization of the model gives the precise approximation of the behavior of the piezo-actuated nano stage, since it is linearized specifically for the current time sample (Cheng et al., 2015). Taylor series expansion of feedforward neural network presented in (5), at time
or
where,
At each control cycle linearized dynamic model of piezo-actuated nano stage is obtained, which can be used to construct the displacement predictor for the modified predictive controller.
2.3. Problem formulation
Consider the displacement function

where
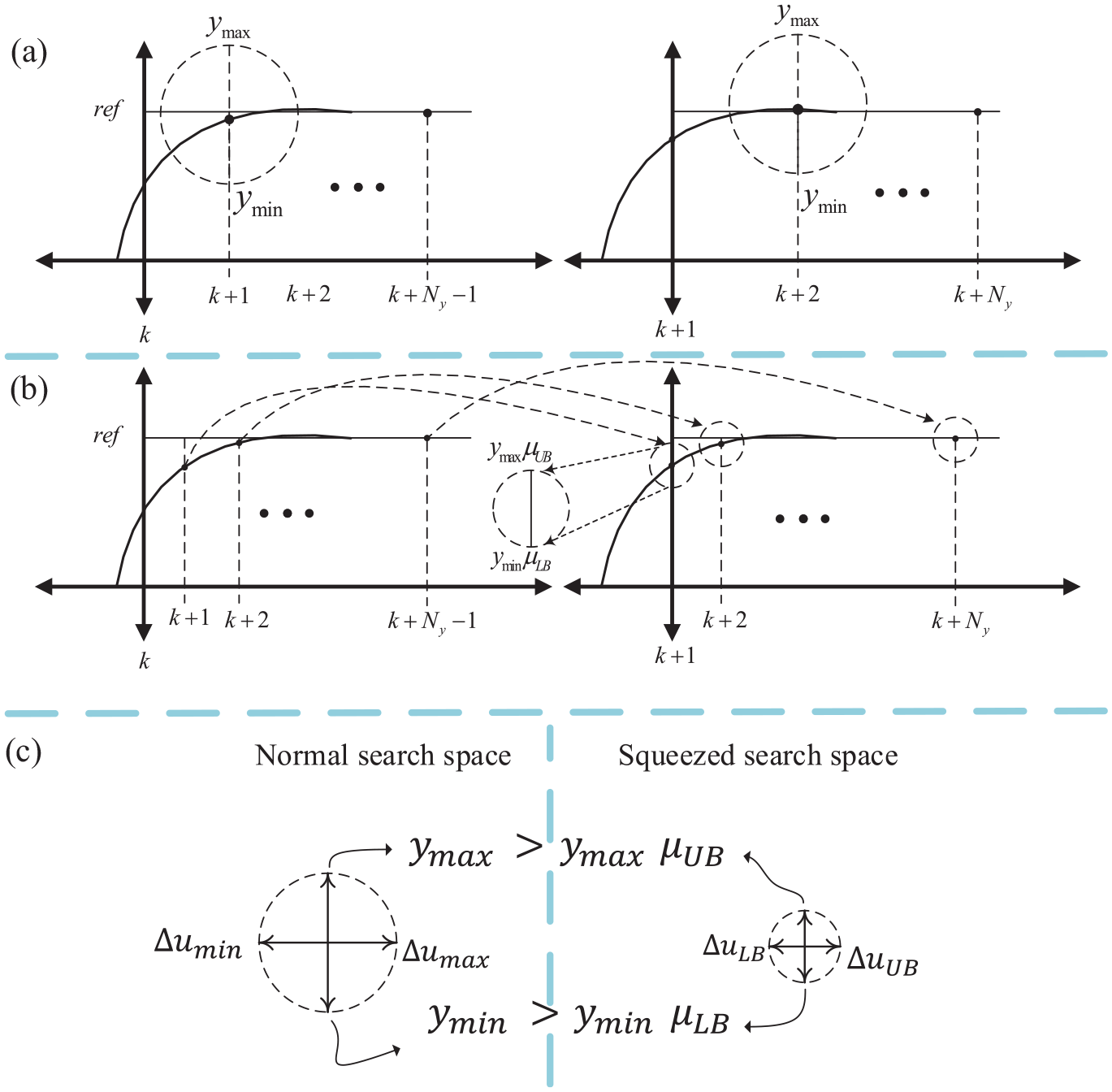
Formulation of search space in: (a) conventional predictive controller, (b) modified predictive controller, and (c) search space formation.
Finding optimum solution in large search space can slow down the optimization process which can deteriorate the tracking control performance. One of the solution to this problem is to reduce the number of decision variables (Zimmer et al., 2015), but this can lead to compromise the tracking performance.
Therefore, modified predictive controller with squeezed search space is proposed in this work Figure 5. The main idea is to construct the squeezed search space in real time which can reduce the computation burden and improve the tracking performance. The search space in conventional predictive control is formed by maximum displacement that can be obtained by the actuator that is,
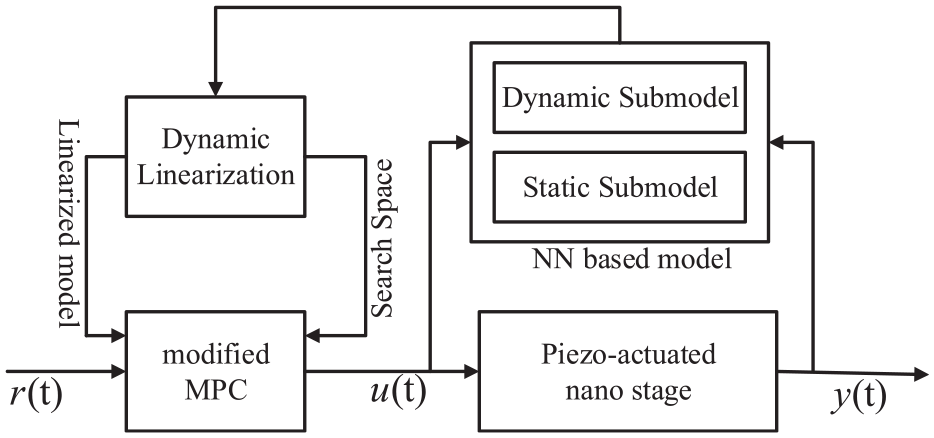
Schematic diagram of modified predictive control.
3. Formulation of modified predictive control
This section presents the displacement predictor, for modified predictive controller, based on dynamically linearized model. The displacement predictor is then used with modified predictive control formulation to implement tracking control.
3.1. Displacement predictor for predictive control scheme
Since during one control cycle, bias term
Let’s define,
where

where

where
Based on predicted displacement in (10) the objective function of conventional predictive controller for the horizon

or

where

Since the first value of matrix

3.2. Modified predictive controller
Predictive controller solve fitness function, in given search space, to obtain control law in every control cycle. Search space is defined by constraints and the upper and lower limits of the decision variables.
Modified predictive controller use the predicted horizon of previous control cycle to estimate the possible optima. This information is then used to construct a new squeezed search space (Figure 4(b)), thus improving the tracking performance.
First the tolerance factor

where
The augmented output

where

where

Form (18) the upper and lower bounds of search space at time
where

where
3.3. Modified predictive controller with integral error compensation
The predictive controller generates the control actions similar to classical proportional controller thus modeling uncertainties may introduce a steady state error. Therefore an integral compensation term is proposed to avoid steady state error (Liu et al., 2015). The final control law with integral compensation term
where

where
The objective function for the modified predictive control,

or

where
4. Convergence analysis of modified predictive controller
This section investigates the necessary conditions for the convergence and upper bound of convergence time for the modified predictive control formulation.
Displacement predictor from (11) is given as:

with optimal control,


The finite time convergence to a target set
Disturbance
N-step disturbance controllable set Given an admissible control input set

In other words

If
Lemma 1. For the predictive controller defined in (11) and cost functions in (29), the closed loop system
for all
Proof. For the time

where
Consider control trajectory

Since at any time
where

thus,

from (34),

This proves that for any time
The following lemma illustrates the role of
Lemma 2. Consider predictive control formulation in (11), with optimal cost (29) and
Proof. Let

Provided that target set
Lemma 2 shows that once the system has achieved convergence
The following theorem will establish the finite time convergence and upper bound for the time of convergence.
Theorem 1. For the predictive control formulation presented in (29), if

Proof. We take contradiction approach to prove the following theorem. Consider system output

and assume that,

that is,

and

Summing up the inequality terms from

This shows that:

which is a contradiction to the assumption made in (43) thus, it is necessary that
5. Results and discussion
In order to verify the performance of proposed control scheme, experiments were conducted on piezo-actuated nano stage using setup shown in Figure 6. The control signal generated by Matlab Simulink/xPc Target, in the target PC, is fed to high bandwidth voltage amplifier, magnification factor of 20 and high precision with ripple less than 0.1 mV. NI-6259 data acquisition interface, with 16 bit resolution, is used as interface between voltage amplifier and target PC. The output of voltage amplifier was given to piezo-actuated nano positioning stage. To measure the output displacement of nano positioning stage, MicroE systems Mercury II 6000 series linear encoder, with high speed and high resolution, is used at a sampling rate of 10 kHz. To avoid the external disturbances, the experimental setup was mounted on an air flotation platform.
Schematic diagram of experimental setup.
5.1. Verification of neural network dynamic model
First the static sub-module (Figure 3) was identified on an input frequency as low as 0.5 Hz. A low voltage DC signal is applied to estimate
The nano stage was excited using an input voltage of amplitude
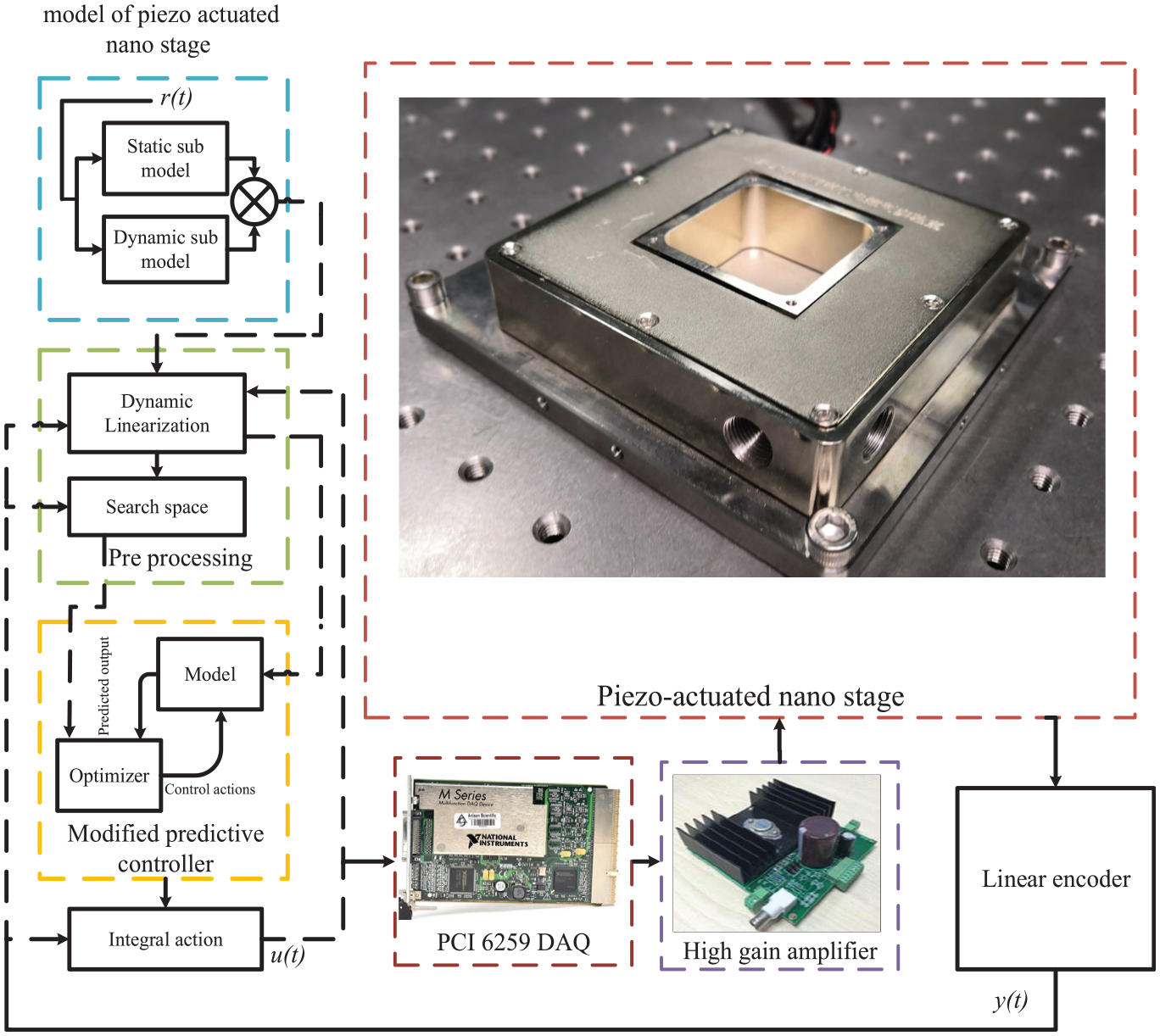
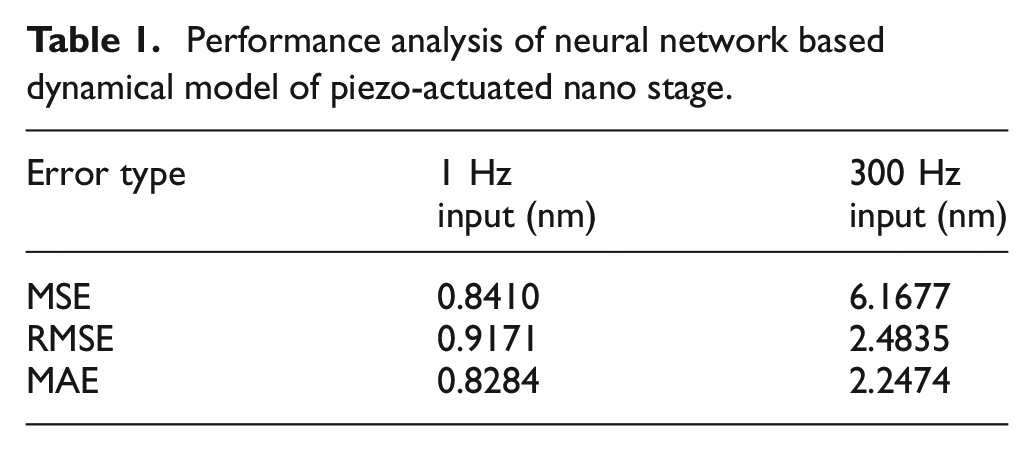
To validate the model performance, sinusoid input signal with constant frequency and varying amplitude was employed. Figure 7 shows the comparison between experimental results and predicted output of the model. The performance of the proposed neural network dynamic model with respect to mean squared error (MSE), root mean squared error (RMSE), and mean absolute error (MAE) metrics is presented in Table 1. The error of the predicted model with measured value is well within the tolerance range. This shows that the proposed model can approximate the behavior of the piezo-actuated nano stage with high precision.
Comparison between predicted and actual displacement of piezo-actuated nano stage: (a) 1 Hz and (b) 300 Hz.
Performance analysis of neural network based dynamical model of piezo-actuated nano stage.
5.2. Verification of modified predictive control scheme
This section presents the validation of modified model predictive control (MMPC) proposed in this article and its comparison with the previously presented state of the art MPC based method (Liu et al., 2015). From here on the method presented in Liu et al. (2015) will be referred to as MPC method in this article. For fair comparison both MMPC and MPC schemes are initialized with similar parameters.
For both MPC and MMPC methods,
To evaluate the performance of the proposed control scheme, high-frequency reference tracking is performed and compared with MPC based state-of-the-art method presented in Liu et al. (2015) (Figures 8 and 9). Sinusoid references with frequencies 10, 100, 200, and 300 Hz are selected as input references. The results show that the performance of the proposed control scheme is slightly better than the conventional predictive controller for lower frequency tracking references. But as the frequency of input reference signal increases, the proposed modified predictive controller with squeezed search space outperformed the conventional predictive controller significantly, with lower tracking error. This shows that the modified predictive controller with squeezed search space has faster convergence properties and can precisely track high-frequency references. The maximum tracking error at 300 Hz is between
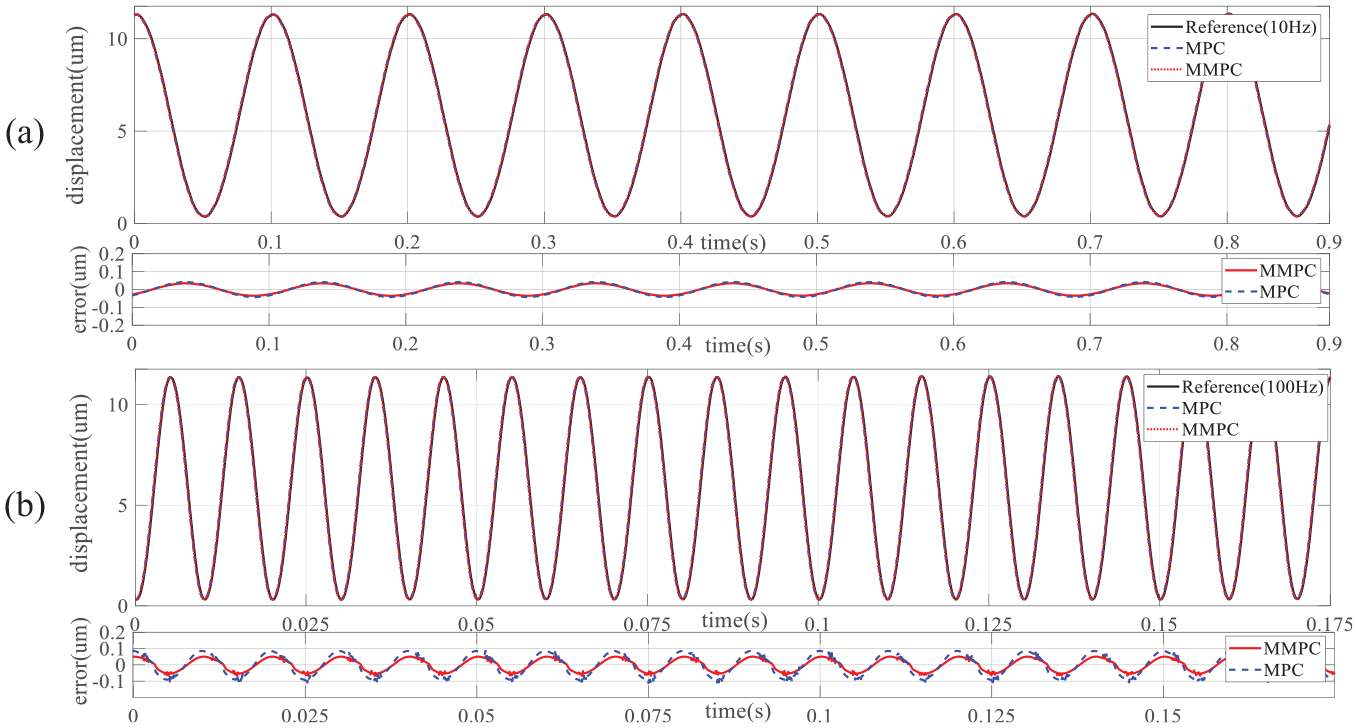
Tracking performance of the predictive controller under reference of: (a) 10 Hz signal and (b) 100 Hz signal.
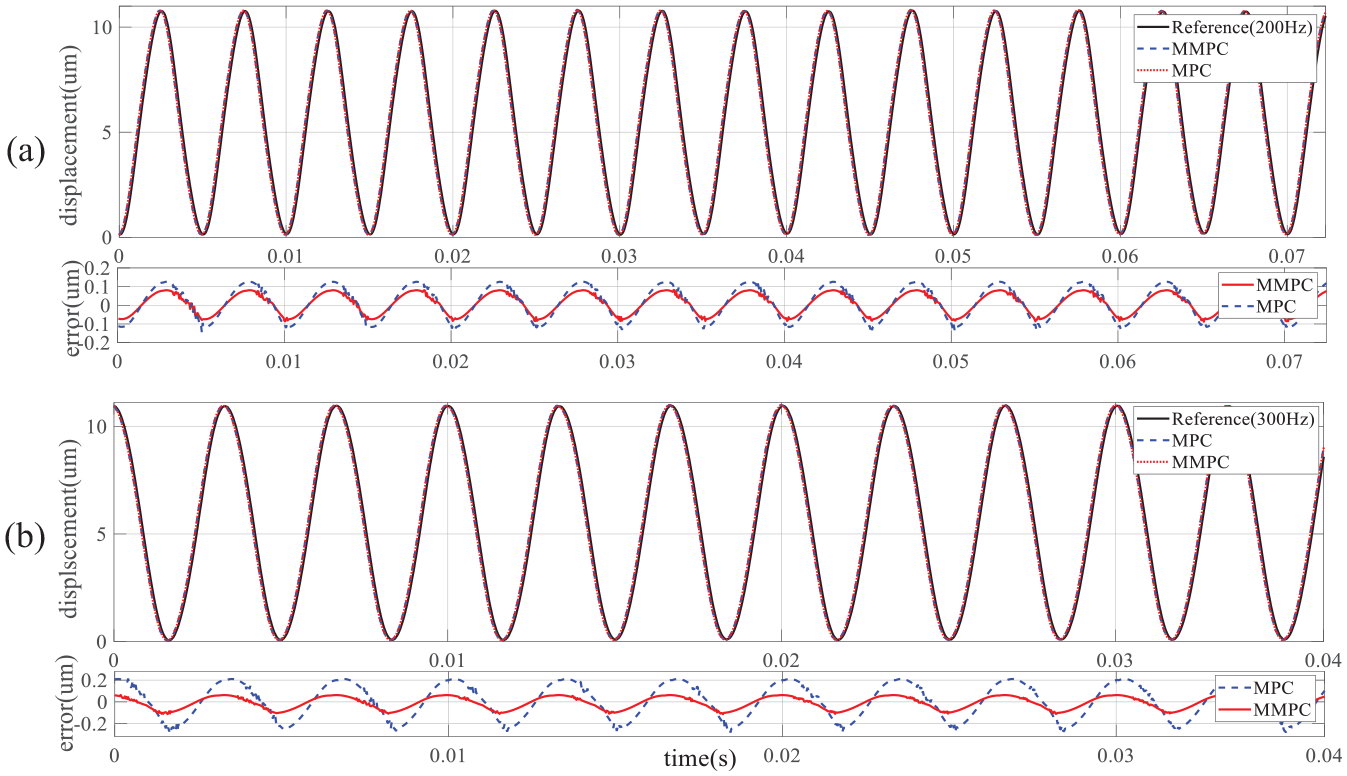
Tracking performance of the predictive controller under reference of: (a) 200 Hz signal and (b) 300 Hz signal.
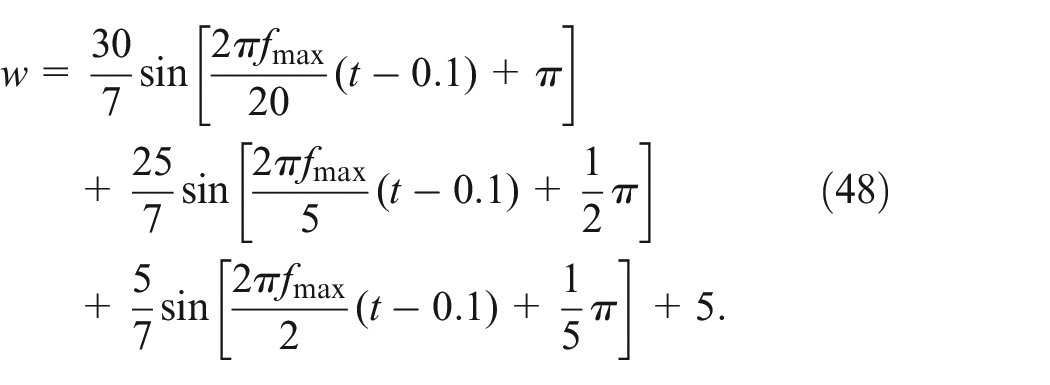
To further validate the performance of proposed modified predictive controller, we used non-periodic signals. A special non-periodic reference (48) was introduced in the experiment. Where
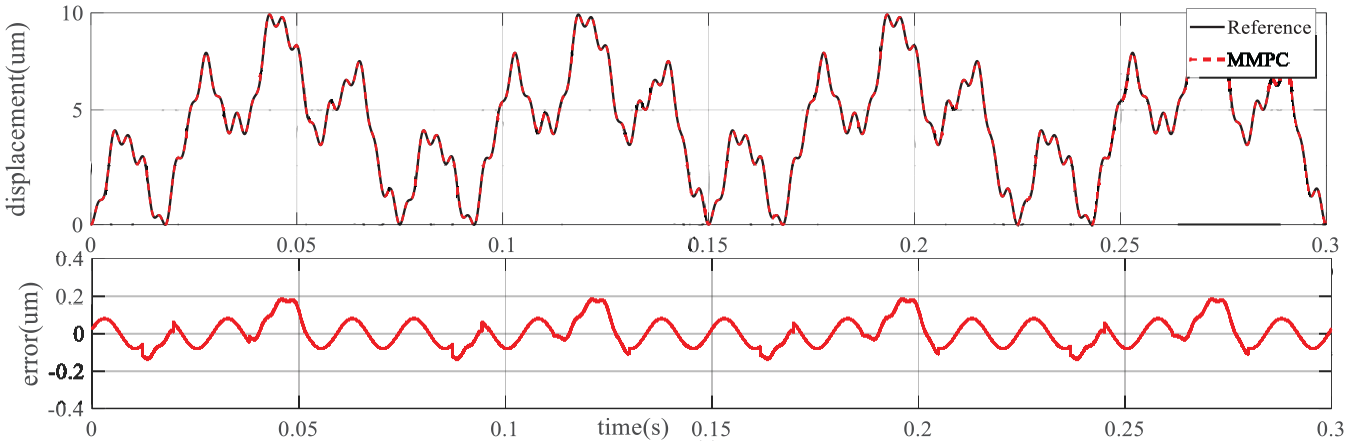
Performance of the proposed control scheme under mixed frequency references.
The performance of proposed scheme was satisfactory under mixed frequency signals. The maximum error range (Figure 10) was between
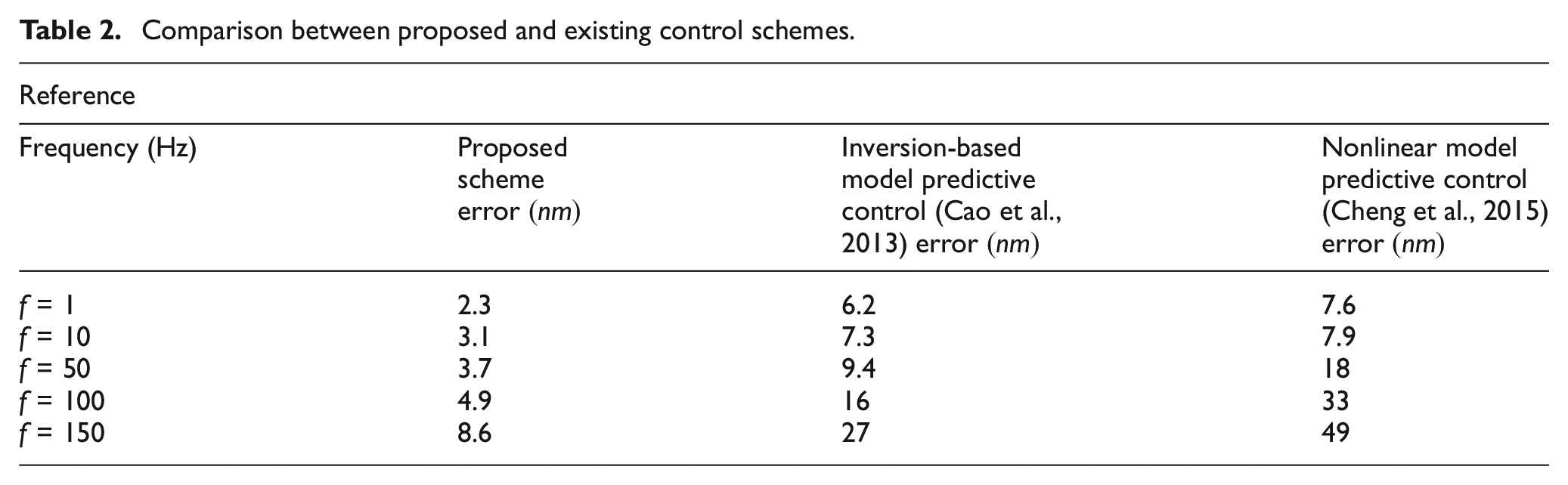
To compare the performance of proposed modified predictive control scheme with other existing state of the art predictive controller based schemes such as, the inversion-based model predictive control scheme (Cao et al., 2013) and neural network based nonlinear model predictive control scheme presented in Cheng et al. (2015), the experiments were conducted on sinusoid references of different frequencies. Table 2 shows the results of comparison between proposed scheme and existing techniques. The proposed method shows significant improvement than existing solution both in lower frequencies as well as higher frequencies reference signal.
Comparison between proposed and existing control schemes.
The control performance of proposed scheme is further verified using triangular reference and compared with the one presented in Liu et al. (2015). Figures 11 and 12 shows the performance of both control schemes at triangular references of 100 and 200 Hz respectively. It is evident that proposed MMPC method out performed control scheme presented in Liu et al. (2015). The maximum error observed was
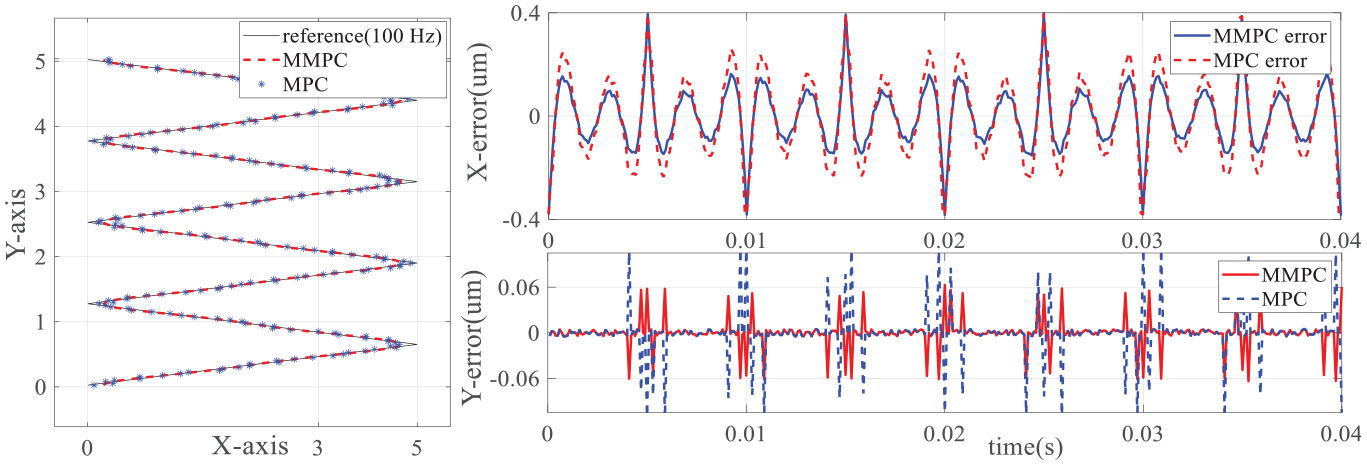
Performance of the proposed control scheme under the triangular reference signal of 100 Hz.
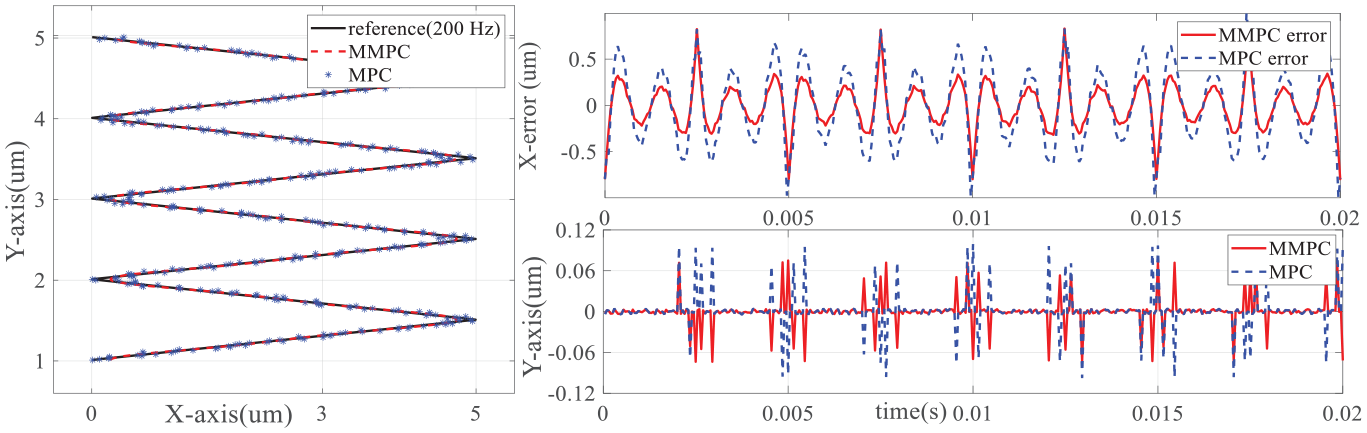
Performance of the proposed control scheme under the triangular reference signal of 200 Hz.
6. Conclusions
A modified predictive controller with squeezed search space is proposed in this paper which can track fast moving reference signals without relying on inverse plant model to compensate inherent nonlinearities (such as hysteresis and creep in case of piezo-actuated nano stage). First neural network based model of piezo-actuated nano stage was constructed and linearized using dynamic linearization technique. The linearized model was then used to implement the modified predictive controller proposed in the paper. The modified predictive controller can squeeze the search space of the optimum controller by using the optimum solutions of previous control cycle, hence improving the controller speed. An integral action was then introduced to reduce the possible steady state error. The effectiveness of proposed modified predictive controller was validated theocratically by convergence analysis of the proposed control scheme.
To further validate the performance of the proposed scheme, experiments were conducted on the piezo-actuated nano stage. The results show that the proposed scheme outperformed the predictive control based state of the art methods presented in the literature, especially in the case of high-frequency reference tracking. The tracking error improvement of about 68
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Major Basic Research Program of the Natural Science Foundation of Shandong Province under Grant ZR2019ZD08, and in part by the National Natural Science Foundation of China under Grant 51775319.