
Abstract
Vibration energy harvesting typically involves a mechanical oscillatory mechanism to accumulate ambient kinetic energy, prior to the conversion to electrical energy through a transducer. The convention is to use a simple linear mass-spring-damper oscillator with its resonant frequency tuned towards that of the vibration source. In the past decade, there has been a rapid expansion in research of vibration energy harvesting into various nonlinear vibration principles such as Duffing nonlinearity, bistability, parametric oscillators, stochastic oscillators and other nonlinear mechanisms. The intended objectives for using nonlinearity include broadening of frequency bandwidth, enhancement of power amplitude and improvement in responsiveness to non-sinusoidal noisy excitations. However, nonlinear vibration energy harvesting also comes with its own challenges and some of the research pursuits have been less than fruitful. Previous reviews in the literature have either focussed on bandwidth enhancement strategies or converged on select few nonlinear mechanisms. This article reviews eight major types of nonlinear vibration energy harvesting reported over the past decade, covering underlying principles, advantages and disadvantages, and application-specific guidance for researchers and designers.
1. Introduction
1.1. Context and underlying principles
Vibration is ubiquitously present in the ambient environment: from cars to airplanes, roads to tunnels, rail tracks to bridges, rolling stocks to lorries, engines to human motion, electrical transmission towers to wind turbines, and infrastructure construction systems to water and gas distribution networks. The research field of vibration energy harvesting (VEH) (Beeby and White, 2010; Priya and Inman, 2009) is concerned with devising decentralised generators capable of converting the ambient vibration energy into useful electrical energy at the point of use.
Combined with the general trend of system miniaturisation, VEH has also been increasing integrated with MEMS (micro-electromechanical system) and IC (integrated circuit) technologies in order to realise self-powered microsystem (Kazmierski and Beeby, 2011). The applications of VEH can be found in powering autonomous and/or wireless sensors for condition monitoring and structural health monitoring; powering wearable, biomedical and implantable devices and powering remote tracking and positioning systems (Beeby et al., 2006; Mitcheson et al., 2008).
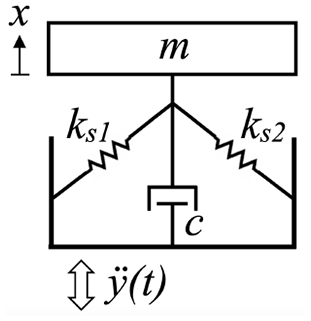
Some of the early examples of motional energy harvesting include the inductive kinetic watch (Seiko, 2011) or the dynamo-powered battery-less flashlight (Popular Science Monthly, 1929). VEH research witnessed an emergence within the modern academia since the 1990s (Antaki et al., 1995; Meninger, 1999; Umeda et al., 1997; Williams et al., 1998; Xu et al., 1998). The convention relied on using a directly excited linear oscillator that can be modelled as a second-order mass-spring-damper system subjected to base-point excitation as shown in Figure 1 and the general form of the oscillator is given by equations (1) and (2)

where m is the effective mass, c is the effective damping, k is the effective stiffness constant, F is the base-point external forcing, x is the response displacement and t is the time domain

where
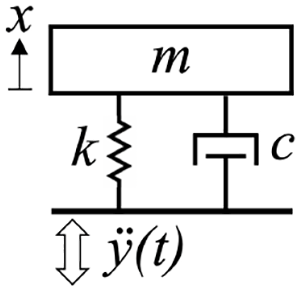
Model of a mass-spring-damper system subjected to base-point direct forcing with acceleration
If the excitation is sinusoidal
By designing the oscillator to match the system resonant frequency


The half-power bandwidth is usually taken as the practical operational frequency bandwidth for VEH systems, and the half-power point can be found using
Williams and Yates (1996) and Williams et al. (1996) were among the first to establish an analytical model for a directly excited linear oscillator applied as VEH. The instantaneous power

For a given sinusoidal excitation, the theoretical power amplitude P recoverable from a linear VEH oscillator can be represented by equation (6) (Williams et al., 1996)
For a given mechanical damping ratio

The quality factor Q of the oscillator can be measured from the limits of the frequency bandwidths
While linear damping is often used to include the electrical damping for electromagnetic transducers (Williams and Yates, 1996; Williams et al., 2001), often for piezoelectric transducers, electrical damping is not modelled just as part of linear damping alone (Erturk and Inman, 2008b, 2011b). For scenarios where the piezoelectric transducer damping is significant in relation to mechanical damping, equation (8) can be applied

where,
By adjusting the overall quality factor Q (as outlined in Figure 2), the VEH oscillator can be tuned to target towards either maximising power output or broadening frequency bandwidth, but both power and frequency bandwidth cannot be simultaneously enhanced. Q also represents the mechanical advantage of the resonating system to accumulate mechanical energy. However, in real-world applications where vibration energy is likely to be broadband and varying, an ideal VEH system should be able to both achieve high power output and operate across a wide frequency spectrum.
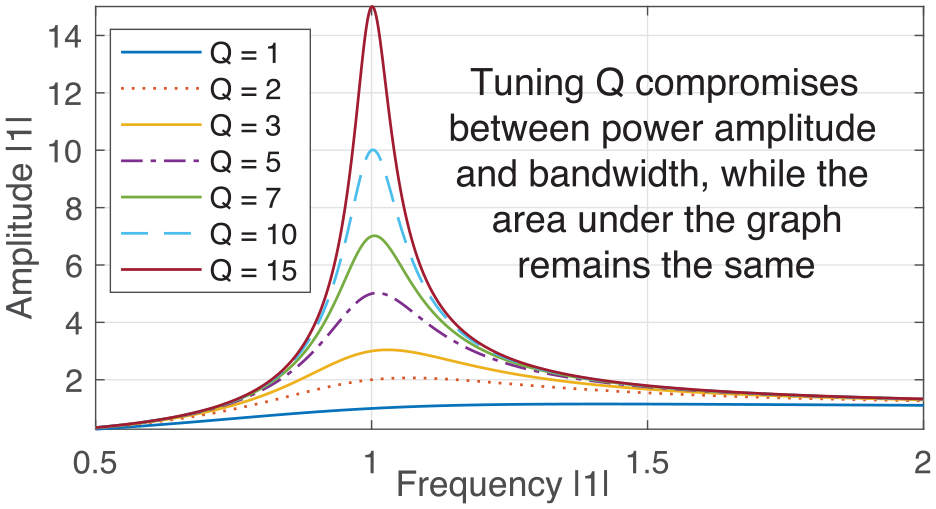
Frequency domain response for a linear mass-spring-damper system with varying quality factor Q. By tuning Q, the system compromises between peak power and frequency bandwidth.
Therefore, the conventional linear oscillator is only suited for specific VEH applications where the ambient vibration is that of a fixed single-frequency source. When operated across a large bandwidth, a linear oscillator is fundamentally inefficient to accumulate mechanical energy. Over the past decade (Tang et al., 2010; Zhu et al., 2010), in order to address the persisting challenges of inadequate power density and narrow operational frequency bandwidth, there has been an increasing variety of methods proposed, including an array of coupled or uncoupled oscillators across various frequencies, frequency tuning mechanisms through mechanical or electrical means, and various nonlinear vibratory phenomena for VEH.
Often, the terms nonlinear vibration and nonlinear oscillator are narrowly used to describe a higher-order polynomial nonlinear spring. However, vibratory nonlinearity and its uptake by the VEH community are both much broader and more nuanced. Nonlinear oscillatory systems are not a single class of vibratory systems but rather an umbrella definition used to encompass oscillators that are not linear. Various types of nonlinear oscillators can be distinguished among themselves, as they are distinct from linear oscillators. Nonlinear oscillators can be broadly described by the general form shown in equation (9) (Thomson, 1998)

where
1.2. Review of nonlinear VEH
A number of previous reviews exist on the use of nonlinear vibratory mechanisms for VEH. Most of these reviews have either targeted on enhancement bandwidth strategies (Tang et al., 2010; Zhu et al., 2010) or primarily focussed on select few nonlinear principles such as Duffing and bistability (Daqaq et al., 2014; Harne and Wang, 2013). However, the motivation of using nonlinear VEH extends beyond bandwidth enhancement, and it can be used to improve overall power density as well as responsiveness towards noisy or shock excitations. Furthermore, while Duffing and bistability are among the most well-known nonlinear VEH, they are far from being the only nonlinear strategies.
This article aims to add to the existing body of VEH review literature by reviewing the underlying principles and advances within the VEH field that incorporates the various types of nonlinear vibration dynamics. Nonlinearity itself is an umbrella term, which can include vastly varying principles that are as distinct from each other as they are from linear systems. This article reviews eight major nonlinear VEH explored by the research community:
Duffing nonlinearity and other higher-order polynomial springs,
bistable and multi-stable oscillators,
parametric oscillators,
stochastic resonance,
mechanical frequency converters,
mechanical stoppers,
self-tuning mechanisms, and
non-oscillatory mechanisms.
Sometimes, combinations of these nonlinear mechanisms (Jia and Seshia, 2013) can be used together along with a linear system. The research of these differing mechanisms by the literature aim to accomplish varying objectives: to enhance power peak, to broaden frequency bandwidth, to tune frequency bandwidth and to enhance responsiveness to broadband noise excitation. However, not all nonlinear mechanisms have been entirely successful in achieving these goals due to constraints either by practicality or by fundamental vibration principles.
Within the scope of this article, only vibratory nonlinear interactions arising within the mechanical domain are reviewed. Frequency interaction mechanisms that use active actuators or electrical damping (Zhu et al., 2010) are not covered herein. Transducers, such as piezoelectric and electrostatic, all exhibit nonlinearities in the electrical domain, which are not explored within this article as well.
2. Duffing oscillators and higher-order polynomial springs
2.1. Background of Duffing nonlinearity
One of the most well-known nonlinear vibratory phenomena explored in the VEH field is Duffing nonlinearity, named after Georg Duffing (Kovacic and Brennan, 2011). The oscillatory systems associated with this type of nonlinear dynamics are known as Duffing oscillators and the function used to describe the dynamics is known as the Duffing equation. Figure 3 summarises a generic model diagram for the Duffing-type mass-spring-damper system.
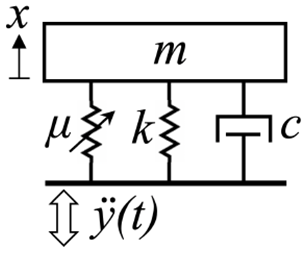
Model of a mass-spring-damper system with Duffing spring nonlinearity
The potential

where
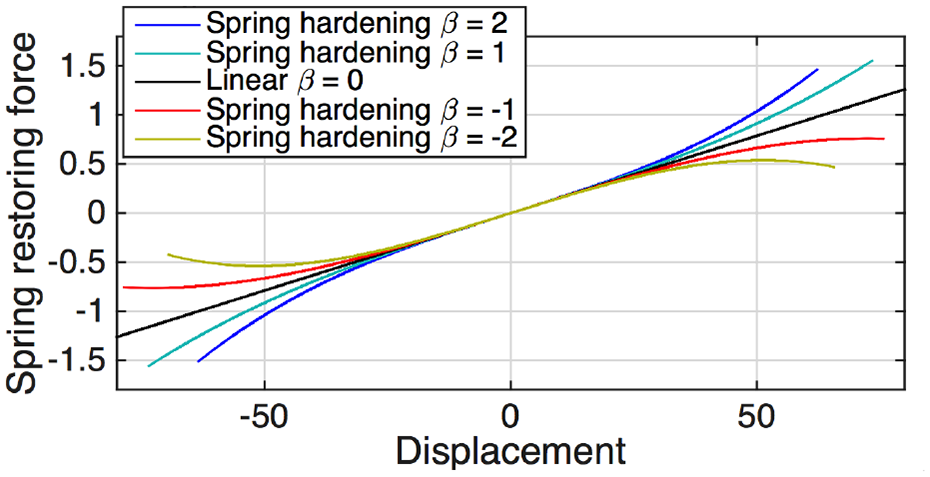
Numerically simulated amplitude-dependent restoring force behaviour of the Duffing equation, illustrating spring hardening and softening effects. Axes dimensions are arbitrary.
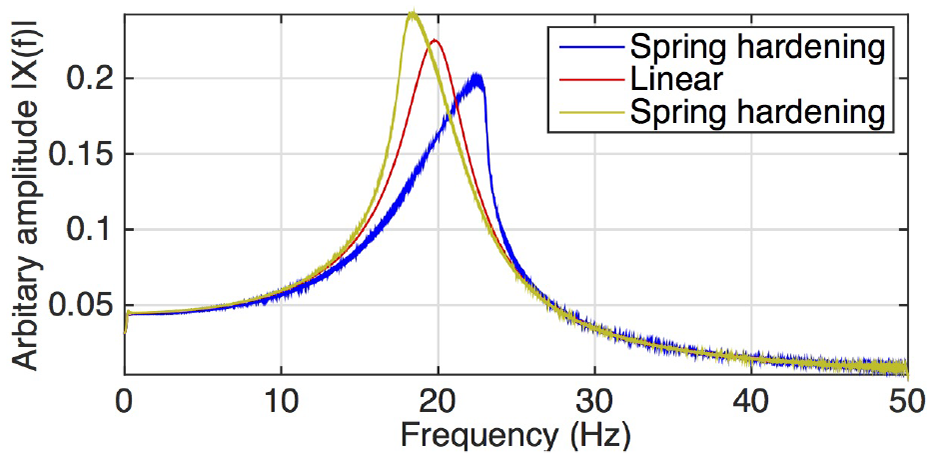
Numerically simulated frequency domain characteristics of the Duffing equation, illustrating resonant peak bending for spring hardening and softening effects. Axes dimensions are arbitrary.
2.2. Duffing nonlinearity for VEH
The core thesis of using Duffing nonlinearity in VEH is to tap into the bending behaviour of the resonant peak as a means of capturing a modestly wider operational frequency bandwidth compared to the linear resonant peak (Barton et al., 2010; Erturk et al., 2009; Mallick et al., 2016; Mann and Sims, 2009; Sebald et al., 2011; Stanton et al., 2009). However, a key practical issue is the frequency hysteresis present in the frequency domain depending on the direction of the frequency sweep. For broadband excitations, the system might be trapped in the less desirable lower bifurcation point around the frequency vicinity of the resonant peak bend.
For most linear oscillators, when driven towards a large oscillatory amplitude, a weak nonlinear behaviour can onset as the spring deviates from its original geometry. This type of geometric nonlinearity is often defined by the Duffing equation with a relatively small
This latter type is generally referred to as Duffing oscillators and the strong inherent nonlinearity can be achieved through a number of design approaches. This includes coupling of a resonator end mass (ferromagnetic) with closely placed magnets to induce either spring softening or hardening effect depending on the magnetic coupling orientation and topology (Burrow and Clare, 2007; Burrow et al., 2008; Erturk et al., 2009; Stanton et al., 2009); the use of magnetic springs instead of physical springs as the restoring force such as magnetically coupled rotary suspension (Spreemann et al., 2006) and nonlinear magnetic levitation where a magnetic is suspended in a single-axis tube (coils wound from outside) by two opposing magnetics on either ends (Daqaq, 2010; Mann and Sims, 2009); and the application of axial pre-stress or pre-compliance to a spring in order to inherently induce hardening or softening (Marinkovic and Koser, 2009).
In real vibrational systems, truly linear resonators are quite rare and nonlinearity can be observed by simply driving an otherwise linear spring, such as a simple cantilever, into high amplitudes (Ramlan, 2009; Ramlan et al., 2010). This is the weakly nonlinear type of the Duffing nonlinearity. The amplitude at which the Duffing term becomes dominant is dependent on the geometry and structural design of the spring. However, to effectively utilise the nonlinear phenomenon for VEH, the aim is to achieve the nonlinearity both at relatively low amplitudes and as few design complexities as possible.
Triplett and Quinn (2009) demonstrated an intrinsically nonlinear piezoelectric composite plate due to the nonlinear coupling between the composite layers during curing. This enabled a nonlinear VEH without the addition of external magnets or magnetic springs. However, the device experimentally deviated from a classical nonlinear model described by the Duffing equation and the behaviour could suggest the manifestation of an even higher-order polynomial nonlinear spring, which has yet to be validated.
Through varying buckling configurations (Huguet et al., 2019; Leadenham and Erturk, 2014), it is possible to asymmetrically manipulate Duffing oscillators to enter harmonic regions in order to substantially expand the operational frequency of nonlinear resonant bend. However, the precariousness of these high-energy solutions along the bifurcation branch still remains and can be a potential limitation when it comes to practical implementation.
2.3. Limits of Duffing nonlinearity for VEH
Barton et al. (2010) and Daqaq (2010) experimentally compared linear and Duffing-type nonlinear harvesters driven by broadband random vibration, and observed no noticeable improvements despite the increased device complexity and promising theoretical predications for limited band response. This could be a result of the presence of non-trivial boundary conditions required to access the potentially wider bandwidth of the nonlinear regime. Therefore, the advantages of operating in the nonlinear regime only become apparent when the various boundary conditions, dictated by the vibrational source, become favourable.
On the contrary, authors such as Cammarano et al. (2014a, 2014b), Erturk et al. (2009), Ramlan (2009), Ramlan et al. (2010), Stanton et al. (2009) and all proposed that Duffing oscillators offer a broader bandwidth performance than their linear counterparts. This is backed up by both simulation and experimental results in the frequency domain. However, these results were achieved by sweeping the frequency response of the oscillators by a sinusoidal excitation. While a sinusoidal frequency sweep unveils useful frequency domain information, it is insufficient to describe the practical behaviour and broadband response of a nonlinear oscillator. This is because real-world vibration is often noisy and random in nature, rather than sinusoidal.
Langley (2014, 2015) established from fundamental principles that all forms of oscillators with a given mass, both linear and nonlinear, will not demonstrate any overall difference in accumulated power under a broadband white noise excitation. Mass is the only dominant parameter that influences power responsiveness from a broadband excitation. This is backed up by independent experimental work from other groups (Barton et al., 2010; Daqaq, 2010) that subjected both comparable linear and nonlinear Duffing oscillators towards broadband excitations. While there might be incremental differences for narrow band excitations that approximate to sinusoidal forcing (Mallick et al., 2016; Nguyen and Halvorsen, 2010; Quinn et al., 2010), the previously perceived broadband promise (Gammaitoni et al., 2009b) of Duffing oscillators over linear oscillators is not backed up by either fundamental vibration theory (Langley, 2014, 2015) or experimental validation (Barton et al., 2010; Daqaq, 2010).
Halvorsen (2013), Nguyen and Halvorsen (2010, 2011) and Tvedt et al. (2010) investigated Duffing oscillator implementations in MEMS designs. This is achieved either by electrostatic pre-stress or by topological designs. A significant and complex nonlinearity onset was observed for the MEMS oscillators. While considerable bandwidth enhancement was initially observed from sinusoidal frequency sweeps (Nguyen and Halvorsen, 2010), later studies drew the same conclusions as Langley, Daqaq et al. and Barton et al., namely, Duffing oscillators do not have a fundamental performance advantage over linear oscillators when subjected to broadband noise.
Sebald et al. (2011) also suggested that under broadband excitation, even for coloured noise, the solution of a Duffing oscillator is typically almost always trapped in the lower bifurcation point. For a piezoelectric transducer, they proposed a fast voltage burst as a possible additional mechanism to take advantage of the potential higher bifurcation point for Duffing oscillations. Nonetheless, no improvement over linear oscillators was observed in both simulation and experiment.
Therefore, it can be concluded that while Duffing oscillators exhibit a seemingly broader frequency bandwidth under sinusoidal frequency sweeps, the average power response performance has no fundamental improvement over linear oscillators. Furthermore, the current characterisation method using sinusoidal frequency sweeps is insufficient to reveal the actual bandwidth performance towards realistic vibrational inputs. Characterisations should also incorporate broadband excitations on top of sinusoidal sweeps.
2.4. Higher-order nonlinear spring oscillators
The nonlinear spring in discussion here is determined by the order of the spring function terms in the governing differential equation of the oscillatory system. A higher-order polynomial spring term is not limited to the Duffing case. In fact, more generically, the source of this type of spring nonlinearity stems from the decision to truncate at a particular correction term of the Taylor series expansion of the potential energy function

where

For the case of Duffing oscillator,
This has been theoretically explored by Kurmann et al. (2015) for up to a fifth-order nonlinear spring. Under certain boundary conditions and excitation conditions, the solutions can approach infinity and the system exhibits an ultra broadband frequency response in the nonlinear regime. However, the physical manifestation of such a system, and keeping the oscillatory system on the desired side of the bifurcation solution might not be as trivial in practical terms as the numerical simulation suggests. It has also been shown that magnetic spring is one potential source that can give rise to the higher-order polynomial spring nonlinearity (Kurmann et al., 2016).
While many in the literature (Mann and Sims, 2009; Zhu and Beeby, 2013b) assume a third-order nonlinear restoring term for magnetic springs and often approximate the system to a Duffing oscillator, the approximation only holds for small oscillations (Kurmann et al., 2016). At large oscillations, the behaviour is much more complex and involves higher orders (Jia et al., 2018c), leading to the theoretical potential of accessing the broadband behaviour described by the odd terms in
3. Bistable and multi-stable oscillators
3.1. Background of bistability
Bistable systems use negative stiffness as the restoring term, which typically involves an unstable equilibrium at the zero-displacement position. Figure 6 illustrates a generic model representation for such systems.
Model of a bistable mass-spring-damper system configured with negative spring restoring terms
For a linear spring operating within the elastic region, the potential energy function takes the form of


Therefore, multiple intra-system potential wells (Figure 7) are created, which trap the resonators in one particular stable state (potential well). Energy can be harnessed through either the normal resonant behaviour within any of the stable states or from the instantaneous energy release when the system attains enough energy to hop from one potential well to another across a potential barrier. This inter-well hopping is also known as the snap-through state.
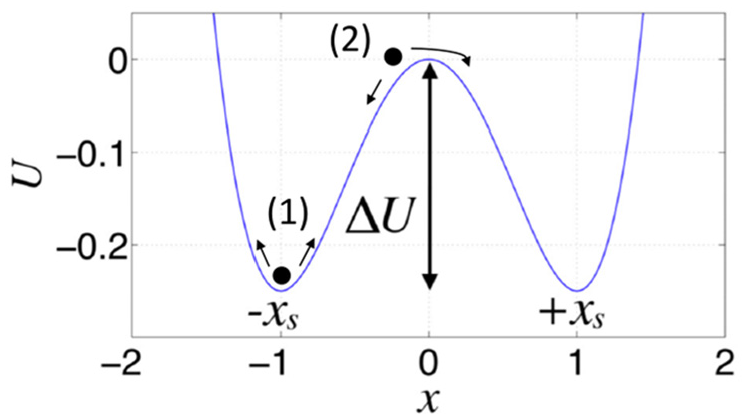
A bistable system, showing two potential wells separated by a potential wall of magnitude
Intra-well oscillation is similar to the Duffing oscillatory response where extra stiffness can be observed upon a given resonant response. On the contrary, the vibration required to induce the snap-through state is generally independent of the natural frequency of the system and only requires the forcing energy amplitude to be large enough to cross the potential barrier. Therefore, assuming ample amplitude, the snap-through mechanism is responsive across a wide range of frequencies, especially for low frequencies where displacement amplitude is high.
3.2. Bistability and multi-stability for VEH
Dogheche et al. (2006) were among the earliest to suggest the possibility of implementing bistability in VEH through the demonstration of a bistable piezoelectric micro-machined ultrasonic transducer originally designed as an acoustic sensor. Moehils et al. (2009) and Ramlan (2009) investigated the higher power output available from snap-through motion over a linear resonator. Bistability can be either mechanically introduced through stressing or inherently configured into the system during manufacturing (Figure 8). An example of the former is the use of axial loading to introduce a buckling force in a clamped–clamped beam (Formosa et al., 2009). An example of the latter is the bistable carbon fibre piezoelectric composite plate by Arrieta et al. (2010), which was created from the residual pre-stress of non-aligned unidirectional fibre orientations in the composite stack.
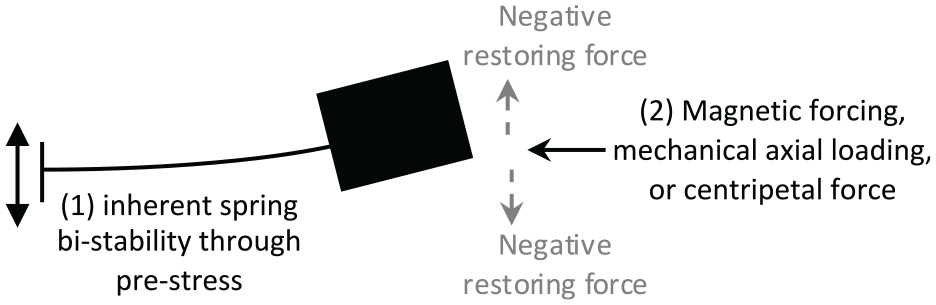
Generic schematic of inducing bistability in a resonator beam (1) involves inducing inherent structural bistability by introducing significant residual stress from the manufacturing process, and (2) involves inducing bistability from external loading within the mechanism.
Magnets are a popular choice to realise bistable VEH. Examples include cantilever with magnet end mass and an opposing magnet in the zero-displacement position to push the oscillatory proof mass magnet away (Cottone et al., 2009; Lin et al., 2010; Stanton et al., 2010); the use of ferromagnetic end mass on a pendulum or a cantilever, and two attractive magnets placed on either sides to pull and nullify the stability of the zero-displacement position (Erturk et al., 2009; Stanton et al., 2009); and two or more cantilevers with magnetically opposing end mass placed in close proximity to push each other into bistable (Lin et al., 2010; Zhu and Beeby, 2013b) or multi-stable (Trigona et al., 2013) states. The bistable or multi-stable VEH thus created from magnetic coupling is not too unlike the use of magnetic coupling for enabling frequency tuning (Challa et al., 2011), multi-coupled resonators (Challa et al., 2009; Petropoulos et al., 2004) and nonlinear resonators. Therefore, a system that is simultaneously all of the above can be realised to exploit multiple resonant and vibration regimes, along with the snap-through mechanism. Centripetal acceleration has also been used as a means for introducing bistability in a rotational system (Horne et al., 2018).
The main advantage of bistability over linear systems is that the snap-through operation is amplitude-dependent rather than frequency-dependent. Therefore, for large-amplitude vibratory applications, such as wide band aerospace vibration, bistability might be more favourable than narrow band linear oscillators. However, the snap-through response of the bistable system is still inherently non-resonant in nature. Therefore, while it benefits from broadband response, the same mechanical amplification from resonators is not enjoyed by snap-through states.
Bistable oscillators can also exhibit resonance when the system is trapped within one of the potential intra-wells. However, the oscillatory response is typically of lower energy than the linear equivalent (Jia and Seshia, 2013; Zhu and Beeby, 2013a), as it is constrained due to the higher pre-stress required to induce bistability. Furthermore, resonance within the potential well is equally confined in operational frequency bandwidth as linear oscillators.
Jia et al. (2019) reported a bistable system internally coupled with a subsidiary oscillator, which utilises the amplitude-dependent inter-well snap-through states to act as a defined internal frequency source to drive the subsidiary oscillator into resonance. Dubbed ‘broadband resonance’, this scheme can deterministically achieve resonant amplification from a broadband vibration irrespective of its excitation frequencies, as long as the average noise intensity is well defined.
Huguet et al. (2017, 2018, 2019) studied the harmonic and subharmonic dynamics of bistable oscillators and suggested a broadening of operating frequency compared to pure first harmonic operation. These authors used an actuator to manipulate the buckling level of bistable doubly clamped beams to control orbit jumps across various harmonic and subharmonic regimes. The expansion of phase portraits for the various higher harmonic and subharmonic bistable oscillatory orbits reveals a theoretical realm where bistable oscillators can exhibit a very broadband high-energy response, akin to that of broadband resonance.
Once the high-energy bistable inter-well snap-through states onset, the desirable large oscillatory amplitude is possible. However, the average power density has been experimentally shown to be equivalent to that of a linear oscillator counterparts (Zhu and Beeby, 2013a; Zhu et al., 2014). Furthermore, from a theoretical point of view, the power density will not overperform that of linear oscillators (Barton et al., 2010; Langley, 2014) when subjected to broadband excitations. This is because while high-energy inter-well oscillations are frequency-independent in nature, it is also non-resonant in nature despite the large oscillatory response.
Therefore, the overall power density performance of bistable oscillators exposed to broadband noise is not necessarily found to be more advantageous than linear oscillators taking into account all these pros and cons (Tang et al., 2010; Zhu et al., 2010). Nonetheless, for low-frequency and large-amplitude noisy applications, bistable systems can be more preferable over linear oscillators due to the amplitude-dependent and frequency-independent behaviour.
4. Parametric oscillators
4.1. Background of Mathieu instability
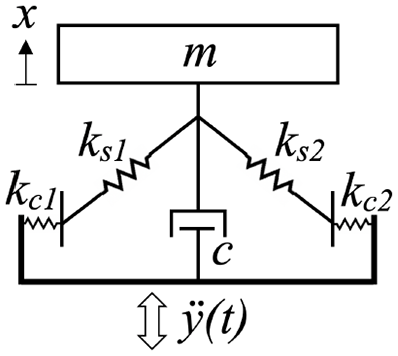
Parametric resonance is an inherently nonlinear vibratory phenomenon, which is distinct from directly excited oscillations due to the presence of a specific instability phenomenon, sometimes dubbed the Mathieu instability. Instead of energy build-up from a forced response, parametric resonance involves a periodic modulation in system parameter. There could be two types of parametric resonance (Cartmell, 1990; Minorsky, 1974; Nayfeh and Mook, 1979): one is the externally induced heteroparametric resonance (which is generally known simply as parametric resonance) where a periodic modulation of system parameter is induced due to external forcing, and the other is the internally excited autoparametric resonance that arises from certain integer ratio relationships among the various natural frequencies of a multiple degree-of-freedom (DOF) system. Examples of the model representations for both are shown in Figure 9.
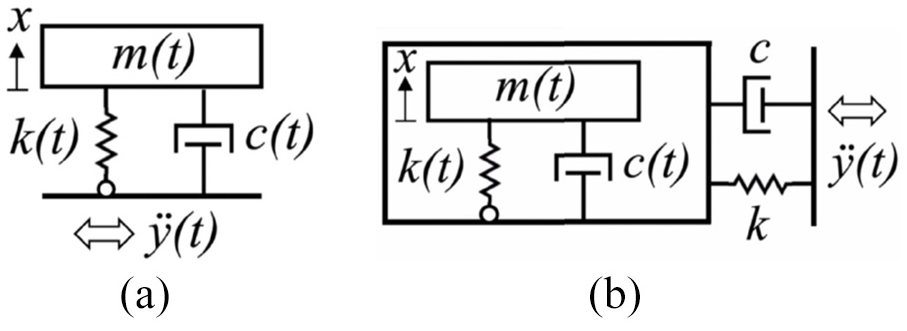
Model of mass-spring-damper system configured for (a) heteroparametric oscillation or (b) autoparametric oscillation when subjected to external forcing with acceleration
In Figure 9, a circular block is used to represent a parametric coupling term, where direct excitation/oscillation is translated into a periodic modulation on the spring stiffness, that is, a parametric excitation. The physical manifestation of the parametric coupling term could involve a rotary mechanism such as that seen in a pendulum (Nayfeh and Mook, 1979), multi-axes leakage of base vibration (Jia et al., 2014a) or movement of the vibrating base affecting the effective stiffness of the spring (Jia et al., 2016). The direct excitation/oscillation components are intentionally drawn in the y direction and orthogonal to the parametric oscillatory response in the x direction in order to illustrate that the parametric response does not onset from direct forcing in its response direction, but it instead arises from the system parameter modulation.
Mathematically, both types of parametric resonances reduce to an equation that contains a time coefficient in at least one of the system parameters, known as the Mathieu equation, named after the elliptical membrane problem studied by Mathieu (1868). The canonical Mathieu equation (Mathieu, 1868; McLachlan, 1947) is given by equation (15). The generic parametric oscillatory equation of motion (Jia et al., 2013b) can be represented by equation (16) and the generic equations of motion for autoparametric oscillator Jia and Seshia (2014) can be shown by equations (17) and (18)

where y and z are generic variables and

where


where
Traditionally, the study of parametric resonance has circled around its control and prevention in regard to structural failure of mechanical systems such as aircraft wings, marine crafts, civil structures (Fossen and Nijmeijer, 2012; Tondl et al., 2000) as oscillations, en route to chaos, could accumulate to significantly larger amplitudes than direct resonance. This implies that it could potentially act as a mechanical amplifier to maximise the energy conversion efficiency of a given transducer and drastically improve its output power density for a given forcing amplitude.
The wider transducer community has dubbed this as the ‘parametric amplification effect’ used to achieve higher input-to-output sensitivity than direct resonance (Carr et al., 2000; Oropeza-Ramos and Turner, 2005; Requa and Turner, 2006; Thompson and Horsely, 2009). Parametric resonance has the potential to simultaneously improve the power density and broaden the operational frequency bandwidth for a given drive acceleration amplitude.
4.2. Parametric resonance for VEH
Daqaq et al. (2009) were among the first to report investigation into parametrically excited systems for the purpose of VEH as well as deriving a mechanical-based numerical model for such systems. While the parametric amplification effect has been previously reported to enhance sensing technologies (Oropeza-Ramos and Turner, 2005; Requa and Turner, 2006), the implementation of parametric resonance for the power generating nature of VEH is fundamentally different as additional power to drive the parameter modulation is not readily available. In order to activate parametric resonance in practice, a critical threshold amplitude and a strict frequency criterion need to be attained (Daqaq et al., 2009; Jia et al., 2014b), which get increasingly more difficult for higher orders of parametric resonance or at higher damping situations (Levy and Keller, 1963; Turner et al., 1988).
Daqaq et al.’s (2009) study laid out the principles and behaviour of parametric resonance for VEH, noting that while parametric resonance is potentially beneficial, the conditions required to activate a heteroparametric system from external excitation might be too onerous for practical applications. This work was further developed by the same group (Daqaq and Bode, 2011; Stabler, 2010) in an attempt to couple in direct excitation to help activate parametric excitation. A compromise was hypothesised to exist between exciting a system at an angle where both direct and parametric excitations can couple in.
In the meantime, Ma et al. (2010) looked at parametrically excited pendulum with a rotary generator coupled to the pendulum pivot. However, as electrical damping was applied, a similar critical threshold limitation can be observed. Jia et al. (2018b) coupled a parametrically excited pendulum to a second DOF lever mechanism, and applied electrical damping on the second coupled mechanism. This enabled minimal damping on the parametrically excited oscillator, thus allowing the manifestation of parametric resonance at a relatively low acceleration amplitude.
Jia et al.’s work in both MEMS and macroscopic platforms (Jia et al., 2012, 2013b, 2014a) laid out various passive design strategies for realising parametric resonance for VEH at relatively low initiation threshold amplitudes (summarised in Figure 10). Jia et al. reported over an order of magnitude improvement in both power amplitude and frequency bandwidth for devices driven into parametric resonance in contrast to the same device operated in direct resonance. In addition, unlike direct resonators that have to compromise between amplitude and bandwidth as the quality factor changes, parametric resonators have been shown to demonstrate both power and bandwidth enhancements when damping decreases (Jia et al., 2013a). This is because as damping decreases, the system operates deeper into the instability region, which is a fundamentally different underlying resonant principle than directly forced resonances.
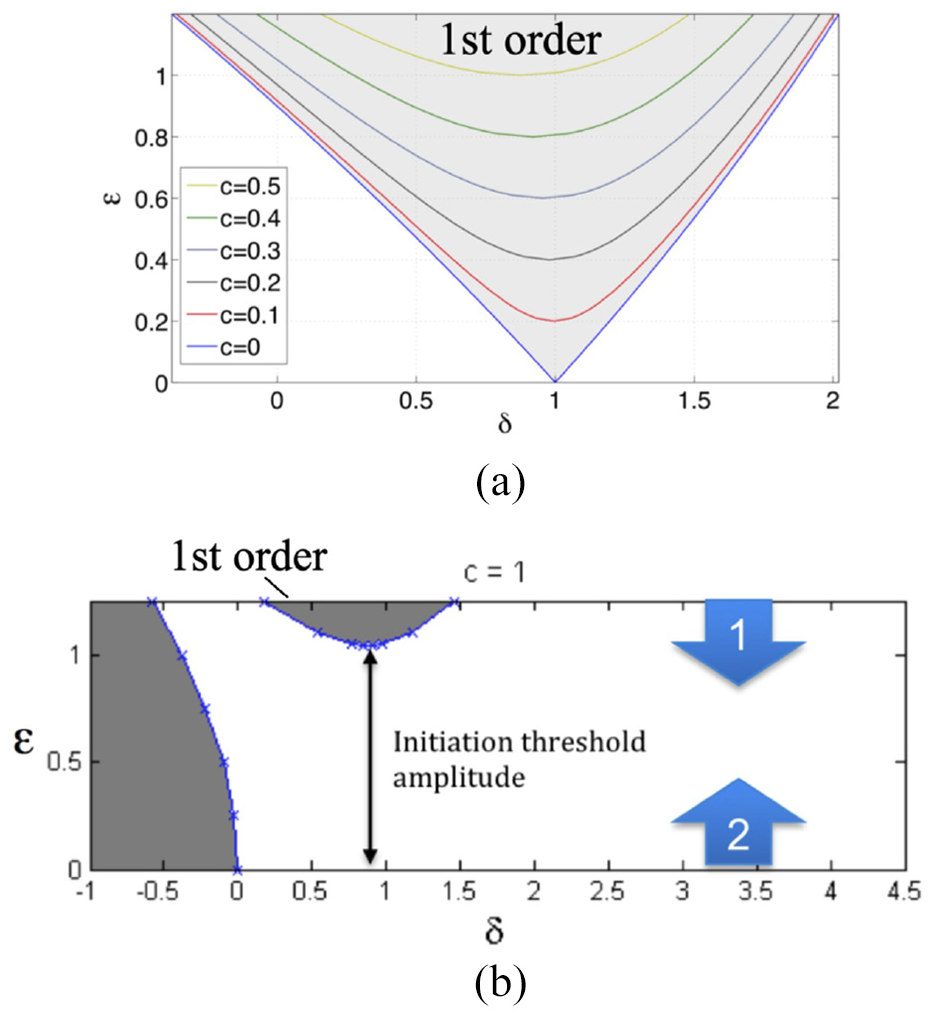
Parametric resonance onsets within the shaded instability regions of the
Apart from heteroparametric resonance (externally forced parameter modulation), the use of autoparametric resonance has been recognised as an even more desirable method for vibration amplification at low amplitudes (Jia and Seshia, 2014) (illustrated in Figure 11). This involves a strict internal frequency relationship between multiple DOF compound resonators, where one sub-resonator’s frequency is twice that of another sub-resonator. Furthermore, a finely tuned autoparametric resonator has been theoretically predicted to exhibit semi-resonant response towards broadband excitations (Kurmann et al., 2016), as the onset of parametric resonance is mainly reliant upon the intrinsic internal parameter ratio rather than excitation frequency. A similar broadband response is also theoretically predicated by Alveras et al. (2017). However, the practical implementation of achieving such a system remains an open question.
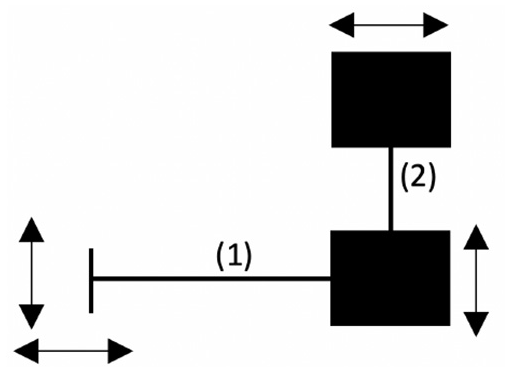
Generic schematic for a basic autoparametric resonator, where the resonant frequencies of the first sub-resonator (1) and the second sub-resonator (2) are related to each other with a ratio of either
Apart from the principal (first-order) parametric resonance, higher orders of parametric resonance can also be used as additional operational frequency windows for VEH (Jia et al., 2013a, 2013b). The number of orders is determined by
Zaghari et al. further undertook a series of studies for realising parametric resonance from a small actuating element as the source of the parametric modulation (Zaghari et al., 2015) along with a base excitation, and characterising its nonlinear dynamic response (Zaghari et al., 2016) while establishing a phase-dependent relationship to its activation (Zaghari et al., 2018a). Zaghari et al. also built a numerical model (Zaghari et al., 2018b) taking into account the electrical domain effects of an electromagnetic transducer.
Overall, the key challenge is to activate parametric resonance at a relatively more attainable set of frequency, amplitude and time-dependent boundary conditions in order to practically realise its high-power accumulating potentials. While parametric resonance holds the theoretical potential of achieving both higher power output and wider frequency bandwidth than directly excited counterparts due to the fundamentally distinct instability phenomenon, its design, implementations and operational considerations are far from trivial when compared to basic direct resonators such as simple cantilever beams.
5. Stochastic resonance
5.1. Background of Mathieu instability
Stochastic resonance (Ando and Graziani, 2000; Gammaitoni et al., 1998) is the vibrational phenomenon where an excitation (signal) that is usually too small to yield a meaningful result (to detect) becomes meaningful with the addition of noise. In sensing applications, it is popularly known as ‘adding noise to remove noise’, since the addition of either white noise or a specific coloured noise helps to boost the signal-to-noise ratio (Droogendijk et al., 2013). This amplification effect has been observed in a number of areas such as electronics, neuroscience and climate change (Gammaitoni et al., 1998), and has been exploited in communication and sensing applications (Ando and Graziani, 2000; Jung and Hanggi, 1991). However, it should be noted that not all noise are strictly stochastic excitations and a system designed to be responsive to noise/broadband vibration does not necessarily exhibit stochastic resonance.
An example of stochastic resonance that is particularly relevant to the VEH context is a bistable system (Figure 12 and equation (19)) experiencing a periodic forcing that is less than sufficient to cross the potential barrier. Although the system is trapped in a potential intra-well, when driven into resonance, it can still yield a meaningful power output. However, with the addition of noise (stochastic excitation) into this system, the extra energy in combination with the periodic forcing could activate the snap-through states by modulating the potential barrier at a specific frequency and release a much larger power output

where N is the noise excitation. With the application of a sinusoidal periodic forcing with amplitude A as illustrated in equation (20), the bistable potential wells start to modulate as shown in Figure 13

Model of a stochastically excited bistable mass-spring-damper system configured with negative spring terms
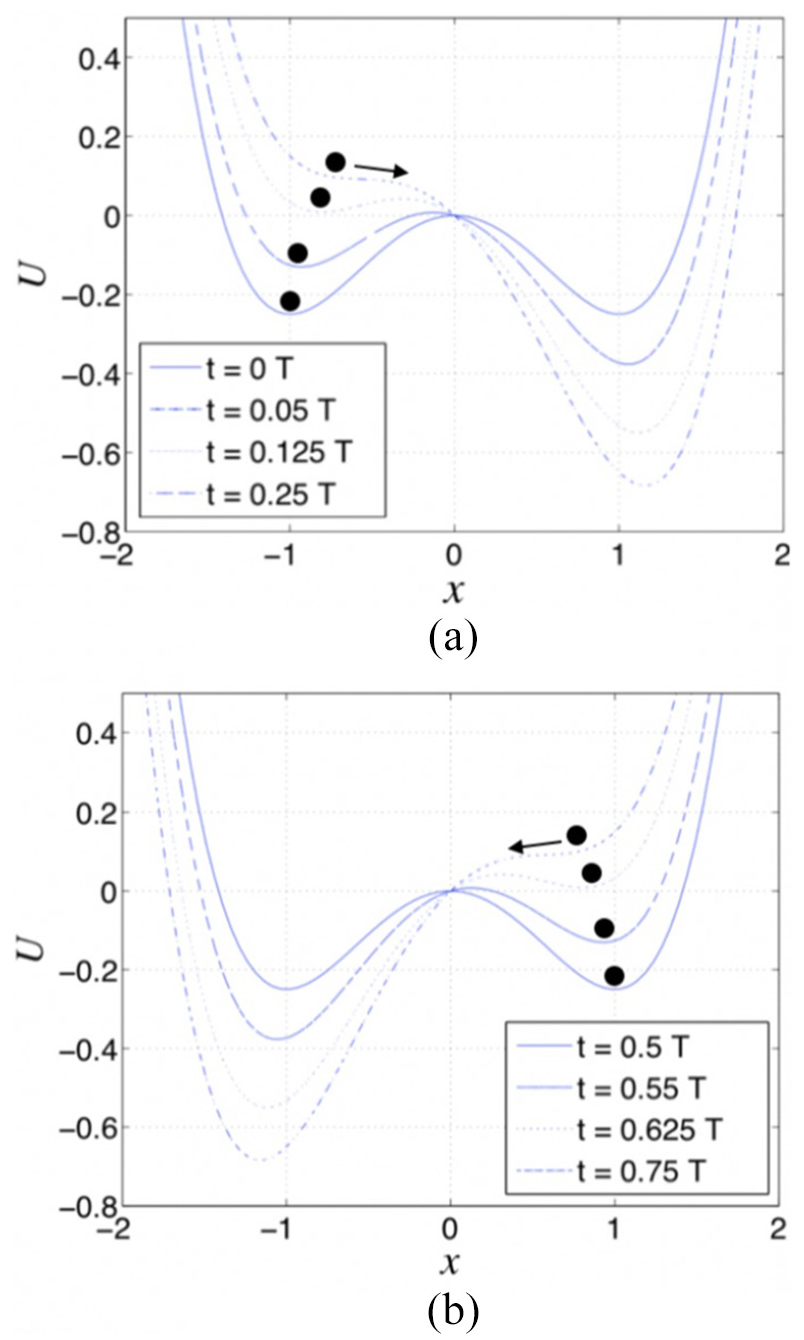
Modulation of the bistable potential well when subjected to a periodic forcing whose amplitude is just enough to match the potential barrier. T is the time period of the periodic forcing, showing that the system is positioned more favourably to cross the potential barrier every half cycle: (a) t = 0–0.25 T and (b) t = 0.5–0.75 T.
The probability of the system hopping between the potential wells is defined by the Kramers’ rate (Gammaitoni et al., 1998; Kramers, 1940; Su et al., 2013; Zheng et al., 2014) as defined in equation (21)

Stochastic resonance can be achieved with a potential barrier modulating frequency in the vicinity of

5.2. Stochastic resonance for VEH
As mentioned previously, the triggering of the bistable snap-through state is independent of the ambient frequency and is instead amplitude-dependent. This makes bistable systems more suitable for harvesting high-intensity noise excitations. However, this implies that high excitation amplitudes need to be maintained for any meaningful output. Leveraging the essence of stochastic resonance, if a system is designed properly to experience stochastic resonance from a vibrational source that comprises both noise and periodic excitations, then such a system has potential to exhibit the above-mentioned meaningful output even if either the noise or the periodic excitation does not meet the prerequisite amplitude criterion to cross the bistable potential barrier on its own (Gammaitoni et al., 2009a, 2009b; McInnes et al., 2008).
Therefore, the energy of the broadband noise can be harvested with the onset of appreciable mechanical response from the snap-through states in contrast to the confined response within the potential well. In essence, the combination of two individually insignificant energy sources (periodic and stochastic excitations) when fed to a carefully designed stochastic resonant system, can yield a significant power response. Although stochastic resonance is not limited by bistable system, this snap-through working mechanism has been the core of the theoretical and experimental investigations within VEH thus far (Formosa et al., 2009; Moehils et al., 2009; Zheng et al., 2014).
McInnes et al. (2008) were among the first to propose a theoretical framework to implement stochastic resonance to enhance VEH. McInnes et al. modelled the addition of a small periodic signal to a bistable oscillator, which was otherwise being exposed to an ambient broadband noise vibration signal that is insufficient to achieve snap-through states. At the right frequency conditions (meeting the Kramers’ rate criterion), it was modelled that the bistable system starts to cross the potential barrier as stochastic resonance onsets. Formosa et al. (2009) experimentally investigated a double bistable system in an attempt to observe large-amplitude amplification from stochastic excitations; however, it was not clear whether stochastic resonance itself was achieved in their system. Cottone et al. (2009) and Gammaitoni et al. (2009a) also investigated nonlinear VEH in relation to noise excitations. However, while the vibrational input might have been stochastic in nature, it also was not clear whether stochastic resonance or any additional amplification was achieved.
The research led by K. Nakano and M. P. Cartmell (Su et al., 2013; Zhang et al., 2014; Zheng et al., 2014) was the first group to definitively experimentally demonstrate stochastic resonance for VEH while showcasing its amplification effect from ambient broadband noise. Their work has shown the modulation of the bistable potential well (Hu et al., 2012; Su et al., 2013, 2014) while also mapping out a comprehensive theoretical and experimental framework for stochastic resonance in a rotational VEH context (Zheng et al., 2014). The rotational scenario has been experimented in automotive wheels (Zhang et al., 2014, 2015, 2016) where the external ambient road vibration acts as the broadband noise excitation and wheel speed–dependent vibration acts as the specific periodic signal. When the wheel operates within a certain velocity, the conditions become favourable for stochastic resonance to enhance the magnetic bistable snap-through states from the broadband road vibration. This is particularly useful because the system can be designed to be stochastically resonant for a specific vehicle speed. This design speed could potentially be the average urban vehicle speed or the national speed limit.
Therefore, in similar applications where an ambient noise excitation is present and a clear stable periodic signal is also available, the system can be designed so that equations (21) and (22) can be satisfied. This is particularly useful as many real-world vibrations tend to be noisy while having a few specific frequency information embedded within that broadband spectrum. However, designing a system to inherently match the application and system-specific Kramers’ rate within its system parameters is also by no means trivial.
6. Other principles and considerations
6.1. Frequency conversion
Miniaturisation of VEH is often desired to realise on-board system integration. However, at smaller dimensions, the natural frequency of the resonators is typically much higher than the frequency of the ambient vibration. Frequency up-conversion is a design technique that can be incorporated in VEH to remedy this situation. Also, some transducers and interface electronics only attain optimal efficiency above a certain frequency. In addition, the overall system can be responsive to multiple frequencies depending on the design.
A frequency up-converter typically involves a primary resonator or dynamic system that is either linear (Edwards et al., 2013; Ferrari et al., 2013; Lee et al., 2008; Rastegar et al., 2006) or rotational (Priya, 2005; Rastegar and Murray, 2009) with potential to incorporate transmission gear trains. This primary resonator or dynamic system is typically designed to be responsive to a lower and/or wide band frequency to couple with the ambient source, which is in turn coupled to a secondary resonating system that usually operates at a higher narrow band frequency with a higher quality factor.
As the larger primary resonator responds to vibration, energy internally flows towards the secondary resonator via a specific coupling mechanism, thus enabling the secondary resonator to oscillate and decay at its own natural frequency independent of the external vibrational frequency. This internal coupling mechanism could involve physical interactions such as tapping or plucking, magnetic coupling or geared mechanism. The shock-induced natural decay oscillatory response in the secondary resonator can then be harvested through a transducer.
Priya (2005), Rastegar et al. (2006) and Rastegar and Murray (2009) demonstrated mechanical plucking of secondary piezoelectric elements, and Ferrari et al. (2013) investigated smaller piezoelectric cantilever beams driven by mechanical impact from the oscillation of a neighbouring large and parallel drive cantilever. On the contrary, Kulah and Najafi (2008) and Wickenheiser and Garcia (2010) used magnetic coupling to actuate the secondary resonators. These examples can be illustrated by the generic diagram shown in Figure 14. Jung and Yun (2010a, 2010b) reported a larger clamped–clamped beam that houses multiple smaller subsidiary cantilever beams as illustrated by the generic diagram in Figure 14. This topology enables direct coupling of the primary and secondary resonators within the same structure rather than an external coupling mechanism that might dissipate additional energy.
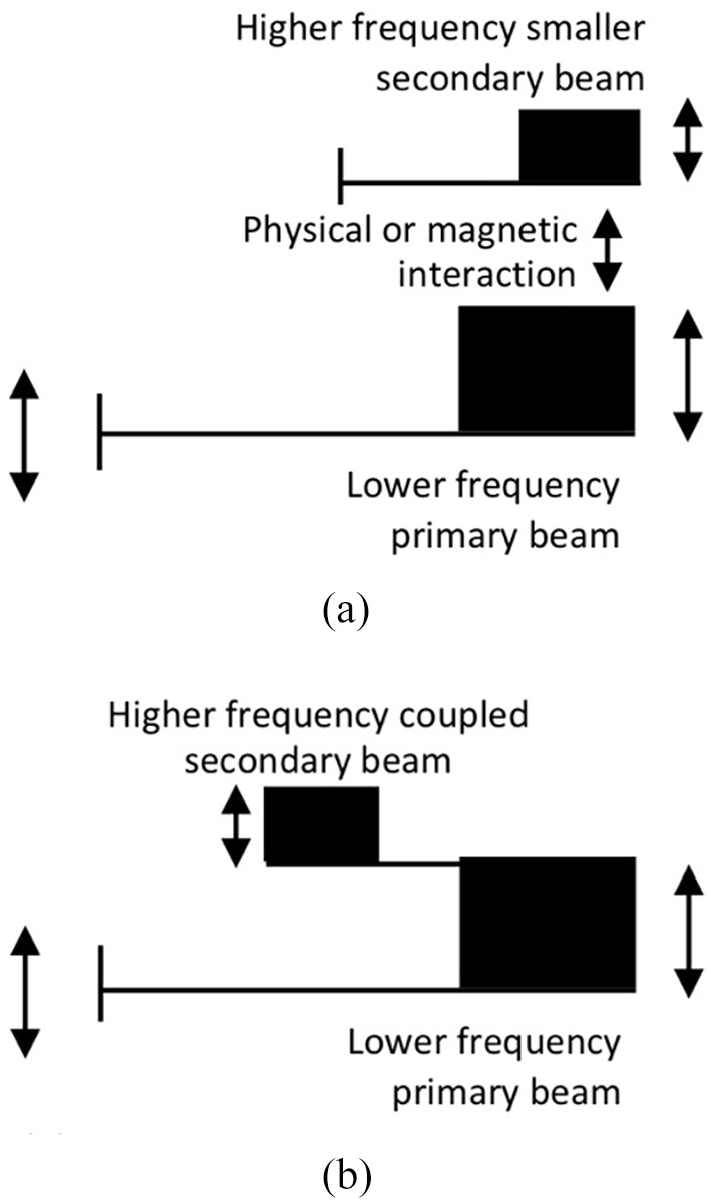
Generic schematic of frequency conversion using a lower frequency primary resonator to drive a higher frequency secondary resonator: (a) physical or magnetic interaction and (b) interaction achieved through internal coupling.
Frequency conversion mechanisms themselves do not necessarily improve bandwidth or power amplitude. In fact, the additional coupling mechanism required might be an extra source of nonlinear energy damping/dissipation. However, the frequency conversion methods might be desirable when the source vibration is far from (typically lower) the optimal operational range of a given harvester and the accompanying power conditioning electronics. However, it should also be noted that the response from such systems is rarely resonant in nature and relies more on oscillatory decay.
6.2. End-stop effect
In an attempt to widen the operational frequency bandwidth, the use of mechanical stoppers to impose a physical amplitude limit has been studied by Soliman et al. (2008, 2009). A general schematic of such a scheme is given in Figure 15. The mechanical stoppers prevented the oscillating electromagnetic cantilever-based harvester to reach its potential peak, thus achieving a flat and truncated peak from the resonant response. More than doubling of the operational frequency band was experimentally observed during a frequency upsweep with a peak power sacrifice of nearly one-third. However, this broadening behaviour failed to manifest during downwards frequency sweep as a hysteresis effect can be observed. Furthermore, double-sided physical constraint demonstrated more immediate bandwidth broadening than a single-sided physical constraint. Le and Halvorsen (2012) also observed a very similar end-stop behaviour in MEMS electrostatic energy harvesters, where anchors were designed to introduce a double-sided physical constraint at a pre-determined displacement limit. In Le and Halvorsen’s case, the bandwidth broadening from the end-stop effect was as high as nearly 4 times than the linear counterpart.
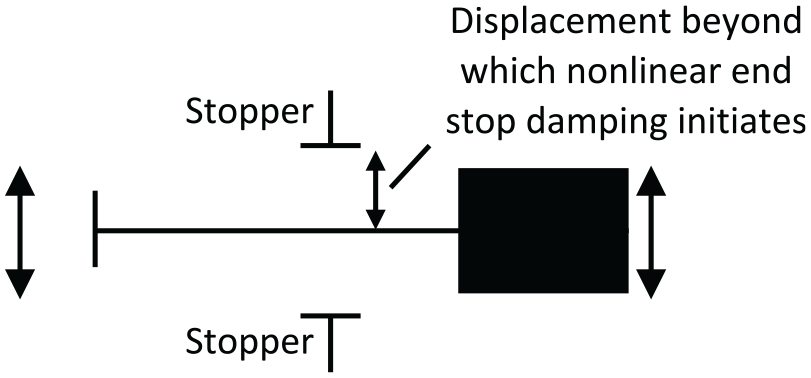
General schematic of a resonator with bidirectional end stops. Amplitude-dependent end-stop damping effect initiates as the resonator attains the end-stop threshold. The end stop can either be mechanical or magnetic in nature.
In both groups’ studies, the frequency broadening were not simply a truncation of what the original resonant peak, but there was a nonlinear resonant peak flattening and extension towards the higher frequency range as the physical constraint introduces an amplitude-dependent nonlinear damping effect. Beyond the amplitude of the physical constraint threshold, the quality factor of the resonator also lowers from this end-stop damping, adding to the peak flattening. While the frequency broadening effect appears promising, such systems compromise the peak power achievable, and the physical impacts from the mechanical stoppers promote structural fatigue. However, it might be potentially possible to introduce magnetic or soft physical constraint to relief wear and tear from the continued physical impacts. For instance, squeeze film damping akin to air spring (Chen et al., 2017) has been leveraged to act as a soft damper for MEMS oscillators that are likely to otherwise experience hard impacts.
6.3. Self-tuning
Literature has widely reported on VEH systems with active (drive power required) frequency tuning mechanisms that involve altering the spring stiffness or centre of mass (Challa et al., 2008; Garcia et al., 2010; Hu et al., 2007; Leland and Wright, 2006). This is typically achieved by an active actuator driving a physical or magnetic interaction with the spring-mass assembly. While tuning the resonant frequency towards the ambient frequency maximises power output, this also requires extra power investment to achieve the tuning. This is further problematic when the ambient frequency constantly varies. Roundy and Zhang (2005) and Zhu et al. (2010) have all analytically concluded that the power drain to continuously active frequency tuning will almost always exceed the net power recoverable. However, certain applications such as ferry engines operating with a fixed load for over an extended period of time have been shown to serve as a feasible candidate for intermittent active tuning (Weddell et al., 2012).
On the contrary, there have been some researchers who have investigated various nonlinear dynamic behaviours that result in a passive (no extra energy required) self-tuning behaviour that matches the effective resonant frequency of the harvester towards that of the ambient source. The idea is for the device to dynamically adjust itself so its resonant frequency tends towards the source frequency.
For instance, Gu and Livermore (2010, 2011) have investigated the effect of centripetal acceleration on the proof mass of a cantilever beam inside a rotary system with radius r. As the rotational velocity
The collaborative studies among Imperial College London, University of California Berkeley and Vestfold University College (Gregg et al., 2014; Miller et al., 2013; Pillatsch et al., 2013) investigated the peculiar behaviour of a doubly clamped beam with a sliding proof mass as illustrated by the generic schematic in Figure 16. As the proof mass is positioned at various locations along the beam, the resonant frequency shifts. With the proof mass able to slide along the beam without any physical constraints apart from friction, the device self-tunes towards the source frequency as the mass self-slides along towards the most favourable position possible within the parameter range. The effect of friction from various material contact was seen to be a key influencing factor. The resulting frequency domain characteristics illustrate a bending resonant peak similar to spring hardening effect. While the device is still bandwidth limited, the operational bandwidth is significantly wider than a linear counterpart. However, frictional energy loss as well as wear and tear from the sliding mechanism might be potential implementation concerns.
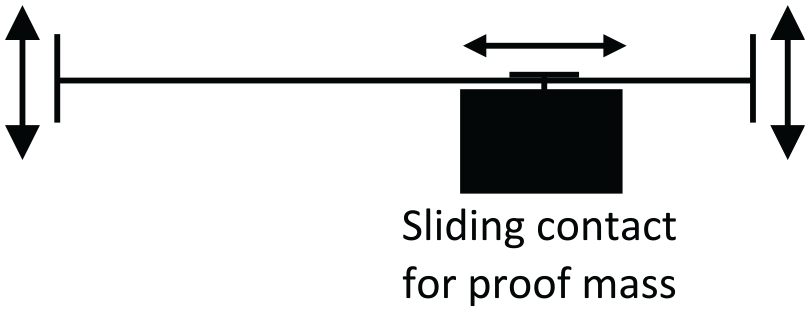
General schematic of the self-tuning resonator achieved through a sliding proof mass.
6.4. Non-oscillatory mechanisms
While any system driven out of resonance will qualify the non-resonant characteristic, there have been several studies that utilise some sort of non-restoring primary dynamic system to drive a secondary VEH resonator. In a sense, this is similar to the frequency converters, except the primary dynamic system here is neither a resonator nor does it possess a restoring term. Such a harvester will be independent of frequency but more sensitive to the absolute value of the excitation amplitude. Therefore, despite the broader frequency bandwidth, the profitability of such devices diminishes for higher frequency where the displacement amplitudes of the drive vibration are typically low and are insufficient to overcome the inertia.
Examples for these non-oscillatory harvesters include cylindrical ferromagnetic roller in a chassis that closely houses an array of small piezoelectric cantilevers with magnetic end mass (Pillatsch et al., 2012) or ferromagnetic/magnetic rolling balls that are coupled mechanically by impact (Cavallier et al., 2005), which can all be either magnetically (Ju et al., 2012, 2013) or electrostatically (Bian et al., 2013) linked to a transducer. Roundy and Tola (2013) demonstrated a device with a single-axis rolling ball inside a fixed tight container that mechanically pushes against a circular proof mass of a suspended piezoelectric cantilever embedded at the centre of the container above which the ball rolls across. From the experimental frequency analysis, it was found that the rolling ball is responsive to low frequencies and becomes increasingly energetic with increasing frequency over a wide range (1 to ~25 Hz) until a specific higher velocity is attained where the ball abruptly becomes motionless due to the overwhelming coulomb friction.
Therefore, while the system is theoretically independent of frequency, it is actually practically unsuitable for high or even moderate frequency applications where the source displacement amplitude is unlikely to be substantial enough. On the contrary, the suitability towards low frequency and high displacement amplitude potentially aligns these mechanisms towards applications such as wearables or human/animal motions (Pillatsch et al., 2012).
6.5. Metamaterial and micro-structural manipulation
As previously mentioned, Arrieta et al. (2010) introduced composite material plates and beams with built-in bistability by leveraging different alignment angles of composite fibres and pre-stress. Similarly, various forms of nonlinearities can be inherently incorporated into materials and structures through various design and fabrication techniques. This is achieved through a class of artificial materials known as metamaterials that are specifically engineered at a microscopic level to exhibit unusual materials properties, including mechanical, acoustic, optical, electrical, dielectric, electromagnetic and other properties (Kshetrimayum, 2004).
Metamaterials themselves are not a different category of vibrational nonlinearity but can be used to intrinsically exhibit nonlinearity. Within the context of kinetic energy harvesting, mechanical property manipulation is often the main focus. However, other properties can also be manipulated to help harvest other domains of energy such as acoustic, solar and electromagnetic (Chen et al., 2014). Mechanical metamaterials can include auxetic materials and structures that have negative Poisson’s ratio (Ren et al., 2018) as well as materials with inherent bistable and self-locking properties derived from origami style cellular structural designs (Kamrava et al., 2017).
Auxetics have already been demonstrated to help enhance the power efficiency for harnessing direct contact kinetic energy along with triboelectric (Zhang et al., 2017) and piezoelectric (Li et al., 2017) generators. However, its effectiveness to enhance more dynamic kinetic energy and its vibrational frequency behaviour are yet to be fully investigated. Thus far, the benefits of auxetics illustrated are essentially that of mechanical displacement and/or force amplifiers similar to the stacked amplifiers for piezoelectric transducers (Zhou and Zuo, 2013).
Furthermore, Hwang and Arrieta (2018, 2019) have proposed a bistable lattice design that essentially arrays microscopic bistable lattice cells together, where oscillatory wave of one snap-through state can propagate along and trigger subsequent snap-through states. This creates an inherently bistable metamaterial at the constituent lattice cell level and gives rise to inherently frequency-independent behaviour suitable for harnessing broadband vibration. While the propagating vibration waves can be triggered independent of input frequency, the oscillatory behaviour is still inherently non-resonant in nature. This new bistable lattice metamaterial maximises and embodies the advantages of conventional bistable structures and can potentially be used to capture low-amplitude broadband noise vibration as well.
6.6. Solution co-existence and control of high-energy orbits
Most nonlinear vibratory principles have observed bifurcation and co-existence of solutions for a particular set of frequencies. Within the Duffing nonlinear resonant bending regime, there are both low- and high-energy output branches (Daqaq, 2010), which can manifest as apparent hysteresis that limits practical implementation. Within the context of bistable oscillators, the system with just about sufficient energy to overcome the potential barrier can either enter into the high-energy inter-well snap-through states or be trapped within the relatively low-energy intra-well oscillations (Daqaq et al., 2014). Furthermore, certain orders of parametric resonance, such as the second order
Trying to sustain continued operation in high-energy orbits within the Poincaré map is non-trivial and many studies have been devoted to understanding and controlling the dynamics of these more desired vibratory regimes. For spring nonlinearities, this includes using impedance damping modulation from the electrical domain as a means of controlling the oscillatory trajectory in the high-energy branch (Mallick et al., 2016), using piezoelectric actuation impulses to perturb the oscillator into the high-energy orbits (Lan et al., 2017) and utilising mechanical impulses from a weakly coupled oscillator (Remick et al., 2014) to achieve similar high-energy results.
Furthermore, mechanical impacts (Zhou et al., 2015) have been used to probabilistically increase the bistable snap-through states and a nonlinearly coupled bistable Duffing piezomagnetoelastic oscillator (Erturk and Inman, 2011a) has been shown to expand the orbit size of the phase portraits. In all these approaches, either through active control or careful design with known boundary conditions, high-energy orbits can potentially be sustained and maximised.
Udani and Arrieta (2017) proposed an active control strategy for bistable systems that results in basins of attraction to promote inter-well snap-through states by introducing controlled phase-shift perturbations via the primary transducer. Similarly, there have also been passive mechanical designs (Jia and Seshia, 2013; McInnes et al., 2008) that attempt to perturb the bistable potential barrier in order to encourage high-energy inter-well oscillations.
While active control schemes will require an investment in energy, the objective is to harness more additional energy from the high-energy branches compared to a passive system, taking into account the extra devoted control energy. As with most energy harvesting scenarios, the power profitability of any scheme will depend on the nature and condition of the vibrational source. However, the implementation feasibility and average power output comparisons of these schemes still require further assessment in order to practically evaluate the net profitability of using active control to sustain high-energy orbits, especially when exposed to a fast varying, random and broadband real-world vibrational source.
7. Discussion on challenges, recommendations and outlook
This article has surveyed the research, theoretical background and advances in nonlinear VEH to date, from the angle of dynamic vibratory principles. The scope has primarily been limited to the mechanical domain. Many nonlinear vibratory principles have been borrowed from the more established vibration dynamics field. This included Duffing oscillators, bistable systems, parametric oscillators, stochastic resonance, mechanical frequency conversion, physical stoppers, self-tuning mechanisms and non-restoring mechanisms.
The use of nonlinearity in VEH has often been hailed as a means to broaden the operational frequency bandwidth. While this is certainly a key research motivation, various nonlinearities have also been used to address a wider range of issues. Some of the main issues and challenges nonlinear VEH aims to address include the following:
narrow and confined operational frequency bandwidth,
low or limited average power and power density,
slow time-varying frequencies, slowly de-tunes frequency-match,
fast time-varying frequencies, short transient states, cannot attain full resonance,
shocks in noise excitations, short decay states, no resonant build up,
broadband noise excitations, cannot achieve resonant amplification, and
switching between low- and high-energy orbits within the Poincaré map.
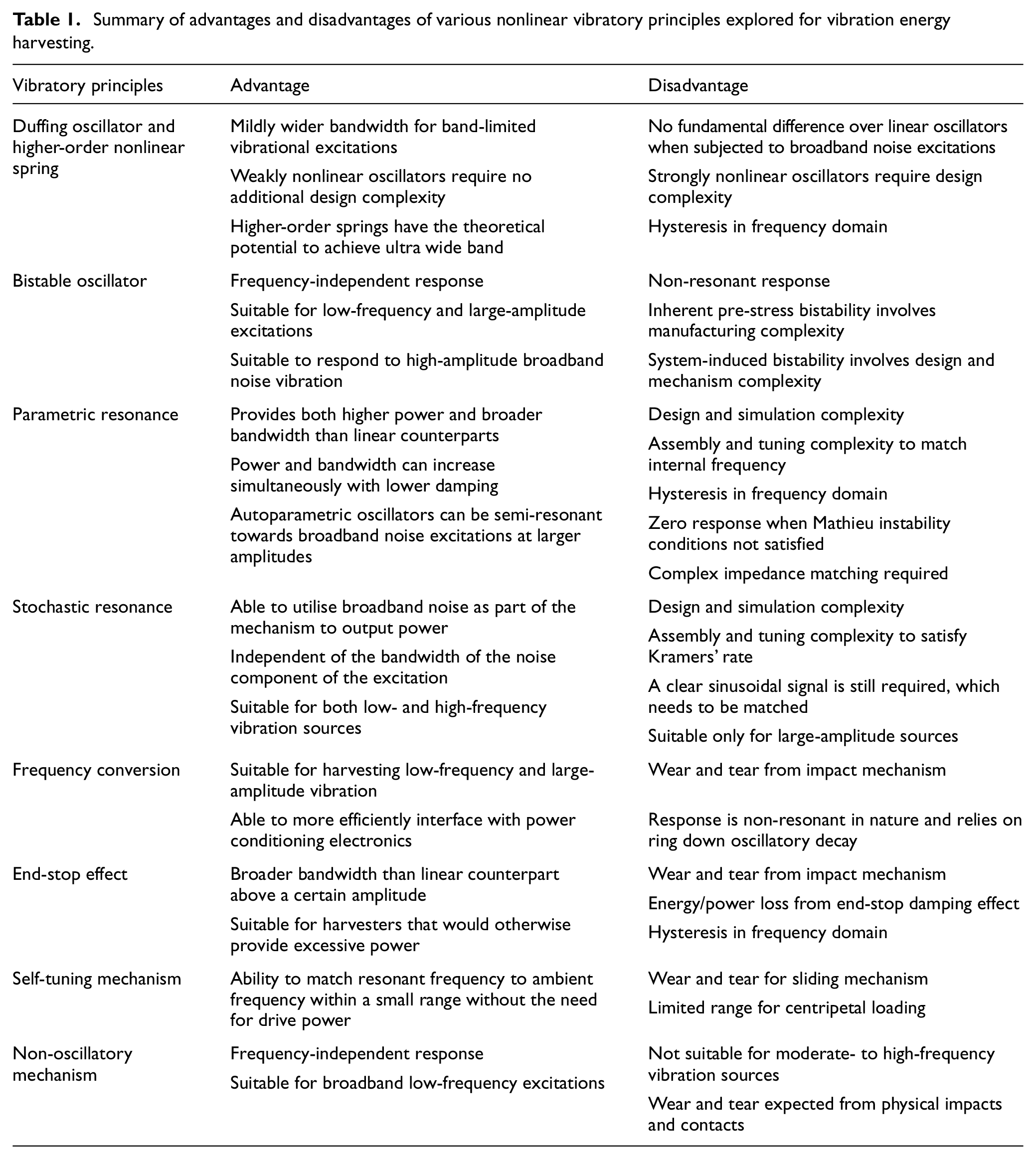
Some of these issues such as time variation of excitation frequencies and broadband shocks are often neglected by researchers, as sinusoidal excitations are widely used in laboratory characterisations. However, real-world vibrations are rarely sinusoidal. Even for real-world periodic excitations, the spectrum often includes noisy broadband signals. While Duffing has certainly enjoyed most of the fame within the arena of nonlinear VEH, its initial broadband promises have hardly fulfilled the earlier hype. The past decade saw a rapid emergence and evolution of research on these peculiar nonlinear strategies. A brief summary of the advantages and disadvantages for each type of nonlinear vibratory principles is presented in Table 1.
Summary of advantages and disadvantages of various nonlinear vibratory principles explored for vibration energy harvesting.
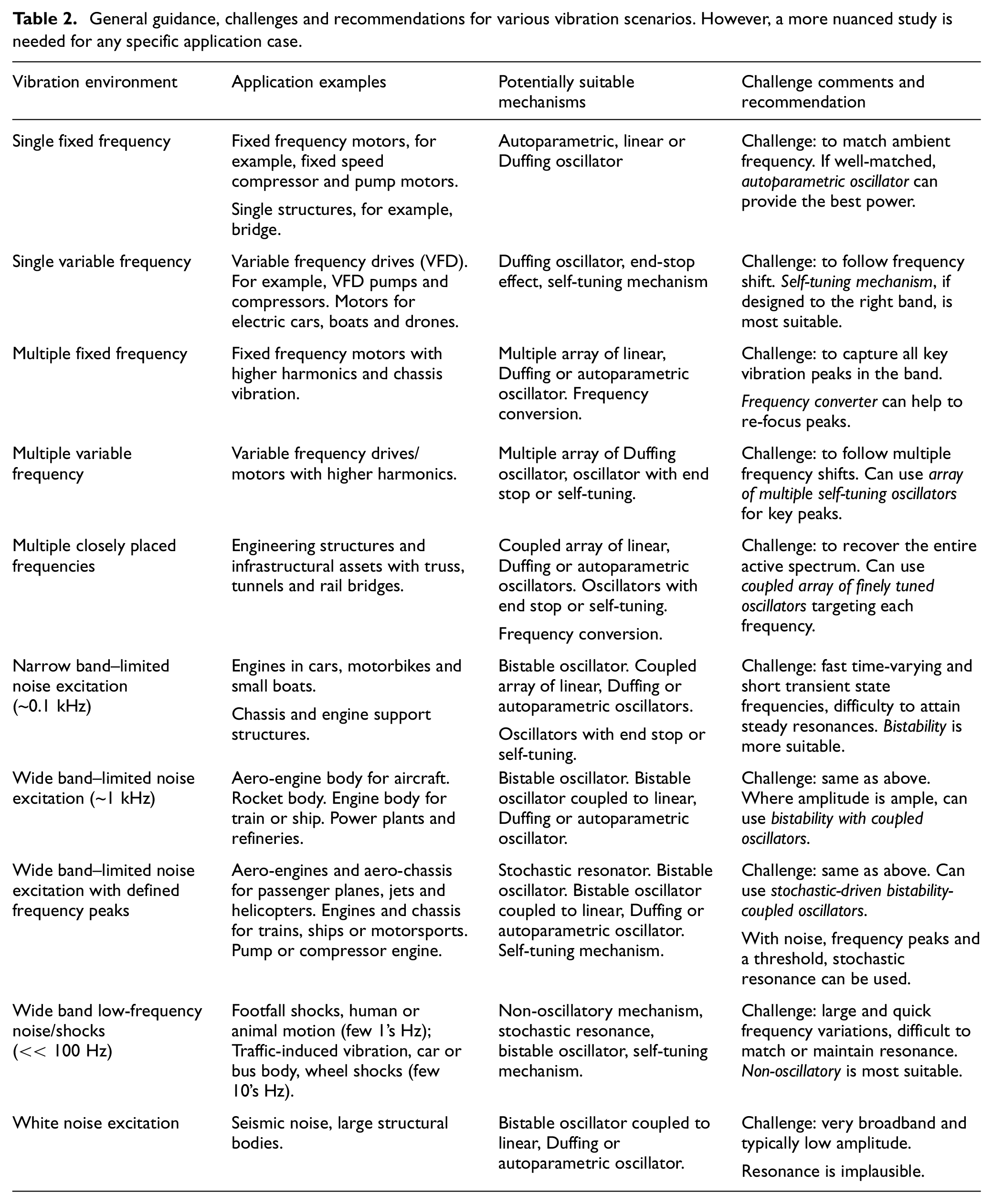
Just like most engineering problems, there is rarely a one-size-fit-all solution. Almost always, selection of a most suitable method depends on the application specification and the vibration environment. Table 2 discusses a few key vibration scenarios and their respective application examples, providing further comments on challenges and design recommendations.
General guidance, challenges and recommendations for various vibration scenarios. However, a more nuanced study is needed for any specific application case.
This tabulated design guidance is derived from the experience and opinion of the author based on this literature survey at this point in time and the author’s previous work on real-world vibration assessments (Du et al., 2017; Jia et al., 2017). Furthermore, future developments in respective nonlinear VEH mechanisms might evolve this design guidance. Also, the vibration environments categorised here are vastly generalised. In reality, real-world vibration profiles are much more complex and may not neatly fit into a specific category. Therefore, a more nuanced and case-by-case design process is needed by a learned expert in order to determine the most suitable vibratory mechanism to recover kinetic energy for a particular given real-world vibration profile.
Furthermore, some mechanisms are easier to design, manufacture and calibrate than others, adding another engineering cost dimension to the overall optimisation process. For instance, given the presence of manufacturing tolerances, it can be more costly to finely calibrate individual autoparametric oscillators to inherently possess the 2:1 internal frequency ratio compared to the frequency matching of linear oscillators to a given external frequency. Therefore, even if the vibration environment is a suitable fit, the power density and bandwidth enhancements from potentially using an autoparametric oscillator over a linear oscillator should be balanced against the additional engineering cost in determining its worthwhileness.
In recent years, miniature, efficient and low-power switch-mode power conditioning circuits (Du et al., 2016a, 2016b) have also proven to be significantly more efficient than traditional passive rectification circuits. For voltage amplitude range in excess of 1 voltage, the extra conditioned electrical power additionally recovered compared to that otherwise lost to passive rectification during each cycle (up to several folds in certain cases), typically exceeds the power consumption of these active circuits (1 –10’s
Nonlinear VEH is still a relatively niche but continuously evolving field, and each individual type of nonlinear phenomenon is as distinct from each other as they are from linear oscillators. While some of the previously promising advantageous attributes have since been fundamentally challenged (such as the broadband nature of Duffing oscillators), others have continued to fuel ongoing research motivations. No single vibratory principle can so far claim to be the ideal and generic solution for VEH.
While linear oscillators still offer the most simplistic design option, using one or more nonlinear mechanisms can potentially help to address a particular set of technical challenges for specific target applications, depending on the nature of the vibration spectra. Future research could involve the nonlinear coupling and integration of various nonlinear mechanisms. Going forward, the ultimate goal for VEH to maximise power output while also being broadband responsive remains an open challenge for ongoing and future research.
8. Conclusion
Research into nonlinear VEH has witnessed a rapid growth in the past decade. While Duffing is the most widely studied type of nonlinearity for VEH, the numerous types of nonlinear VEH are as varied from each other as they are from linear systems. Adding onto previous reviews in the literature that focused on either the bandwidth issue or select few nonlinear approaches such as Duffing and bistability, this article has reviewed eight major types nonlinear vibratory principles and mechanism that have previously been reported in the VEH research field. This includes Duffing oscillators (and higher-order nonlinear springs), bistability (and multi-stability), parametric resonance, stochastic resonance, mechanical frequency conversion, mechanical end-stop effect, self-tuning mechanism and non-oscillatory mechanism. This article has covered underlying principles, advances in the field, advantages and disadvantages, as well the application-orientated vibration environment suitability discussion for each of these vibratory principles. As often with any engineering systems, there is no one-size-fit all solution and the most appropriate approach almost certainly relies on the environmental and application-specific conditions. Therefore, researchers and designers attempting to develop nonlinear VEH can use the summary overview provided in this article as an introductory guidance to navigate the varied field of nonlinear VEH.
Footnotes
Acknowledgements
The author would like to thank Professor Ashwin A. Seshia for his continued mentorship and treasured friendship.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.