
Abstract
Relatively recently, many researchers in the field of energy harvesting have focused on the concept of harvesting electrical energy from relatively large-amplitude, low-frequency vibrations (such as the movement caused by walking motion or ocean waves). This has led to the development of ‘rotational energy harvesters’ which, through the use of a rack-and-pinion or a ball-screw, are able to convert low-frequency translational motion into high-frequency rotational motion. A disadvantage of many rotational energy harvesters is that, as a result of friction effects in the motion transfer mechanism, they can exhibit large parasitic losses. This results in nonlinear behaviour, which can be difficult to predict using physical-law-based models. In the current article a rotational energy harvester is built and, through using experimental data in combination with a Bayesian approach to system identification, is modelled in a probabilistic manner. It is then shown that the model can be used to make predictions which are both accurate and robust against modelling uncertainties.
Introduction
Over the last decade the supposition that electrical energy can be harvested from ambient vibration sources has been the subject of a considerable amount of research. While much early work was focused on the development of small energy-harvesting devices which could be used to power microelectromechanical systems (MEMS) (such as small sensors which can be placed in hostile environments), more attention is now being paid to the concept of using relatively large devices to harvest energy from large-amplitude and/or low-frequency excitations.
As an example, Rome et al. (2005) proposed using a suspended load backpack to harvest the kinetic energy created by walking motion. Interestingly, it was reported that relatively little additional metabolic energy was required to carry the suspended load backpack when compared to a rigid backpack – it was hypothesised that this may be due to alterations in the biomechanics of walking which were induced by carrying the energy harvester. This led to the work of Papatheou and Sims (2012) where a hardware in-the-loop energy-harvesting backpack was developed such that, by being able to easily vary different settings (such as stiffness and damping coefficients), a thorough investigation into the effect of the device on the human gait could be conducted: see Papatheou et al. (2012) for preliminary results. Additionally, work has also focused on whether, when harvesting energy from walking motion, the deliberate introduction of nonlinearities can be used to enhance energy harvester performance (Green et al., 2013).
Much research has also been focused on the possibility of using relatively large devices to harvest energy from the movement caused by ocean waves. Brown et al. (2007) investigated using energy harvesters to power ocean exploration robots. Deciding to reject solar panels and wind turbines in favour of vibrational energy harvesters (as they are potentially able to operate in all weather conditions and require no external machinery), a device was created which was able to fit inside an autonomous underwater glider. Matsuoka et al. (2002) used a combination of theoretical and experimental analysis to test various types of ‘wave energy conversion systems’ while, through experimental testing of a small-scale prototype, Agamloh et al. (2008) developed a device which was able to generate up to 69 W of power from wave motion.
In Choi et al. (2009) an energy harvester was developed which was designed to power an electrorheological automotive shock absorber. It was reported that the resulting device was compact enough to be attached to a real vehicle, and that its voltage output was large enough to obtain the required damping forces in the shock absorber. In subsequent work by Li et al. (2013) a device was constructed that was also designed to harvest energy from vehicle shock absorbers and, in a series of road tests, was able to generate an average power output of between 3.3 and 19.2 W (depending on vehicle speed).
With the low-frequency nature of the aforementioned applications in mind, many researchers have elected to develop energy harvesters which are able to convert low-frequency translational motion into high-frequency rotational motion (which is then used to generate electrical energy via an electromagnetic coupling). Of the works mentioned thus far, this conversion from translational to rotational motion has been achieved via either a rack-and-pinion (Choi et al., 2009; Li et al., 2013; Rome et al., 2005) or a ball-screw (Agamloh et al., 2008; Brown et al., 2007; Cassidy et al., 2011; Matsuoka et al., 2002). Further advantages of such a device were demonstrated in Hendijanizadeh et al. (2013), where the efficiencies of displacement-constrained translational and rotational energy harvesters were compared. It was found that the electromagnetic coupling coefficient of rotational energy harvesters scaled with device size at a greater rate than translational systems (thus making rotational energy harvesters more favourable in situations where relatively large devices are required).
Of particular interest here is the work of Cassidy et al. (2011) where a detailed study of a ball-screw rotational energy harvester was conducted. In their work the authors noticed that the dynamics of their device was strongly influenced by friction present in the ball-screw mechanism as well as other, hysteretic, behaviour. Using Coulomb damping to account for friction effects, a physical-law-based model of the device was developed. The parameters of the model were then estimated using a least-squares method while, to access parameter confidence, approximations of the parameter covariance matrix were also made.
The primary aim of the current paper is to build on the work of Cassidy et al. (2011) and conduct system identification of a rotational energy harvester (also with a ball-screw mechanism) using a probabilistic, Bayesian approach. To that end the experimental results from a series of tests of a rotational energy harvester have been analysed using Markov chain Monte Carlo (MCMC) methods, thus allowing the relative probability of two competing model structures – both of which feature a difference physical-law-based friction model – as well as the probability of the parameters within each model to be assessed. The result is a probabilistic model 1 of the energy harvester which can be used to make predictions about device performance which are robust against uncertainties in the modelling process (thus allowing one to probabilistically analyse the response of the device to various ambient excitations).
Device description
A schematic of the device in question is shown in Figure 1. It is comprised of a sprung mass coupled to an electrical generator using a ball-screw. The ball-screw converts the translational movement of the oscillating mass to rotatory motion which drives a brushless generator (see Hendijanizadeh, 2014, and Simeone et al., 2014, for a detailed description). The device was 25 cm wide and 110 cm tall.
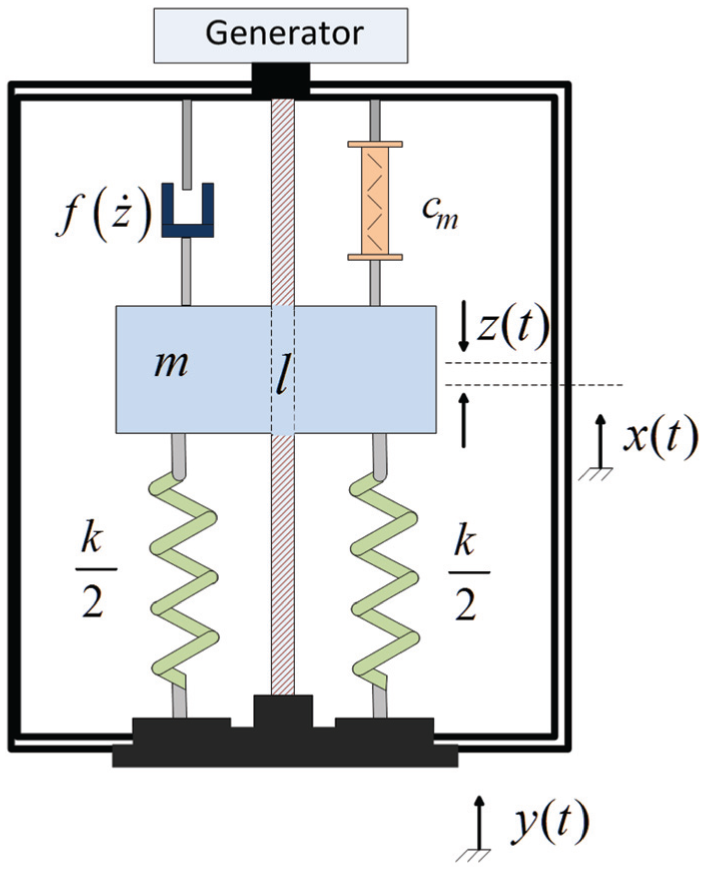
Schematic of rotational energy harvester.
Defining l as the ball-screw lead, cm as mechanical damping, k as spring stiffness, m as the oscillating mass and J as the moment of inertia of the system allows one to write the equation of motion of the device as

where x is the displacement of the mass, y is the displacement of the base


and
Experiment
Figure 2 shows a schematic of the experimental setup used to test the manufactured energy harvester. In this setup the harvester was mounted on a vertical electro-hydraulic shaker and the generator terminals were connected to three variable resistors with a star configuration. Two MEMS accelerometers with a sensitivity of 800 mV/g and a dynamic range of ±5 g were attached to the oscillating mass and the shaker. A voltmeter sensor was used to measure the voltage across the generator terminals, that is, the load resistance. The movement of the shaker was controlled by a PC through an amplifier model FE-376-IPF from Flyde-Signal Ltd. The voltage output signal and the acceleration of the mass and shaker were captured by a National Instruments data acquisition (Daq) system with a sampling frequency of 256 Hz. Figure 3 shows the actual implementation of the test rig, including the energy harvester, shaker and variable resistors.
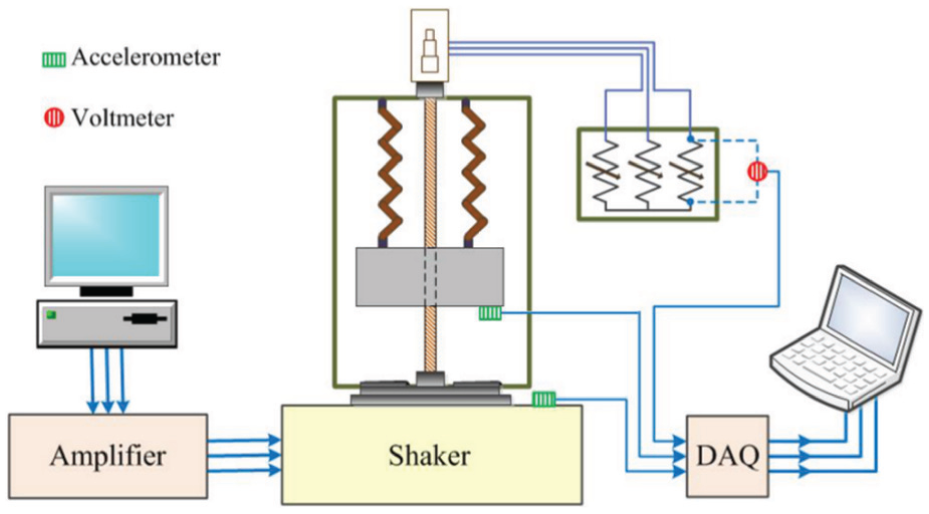
Schematic of experimental setup.
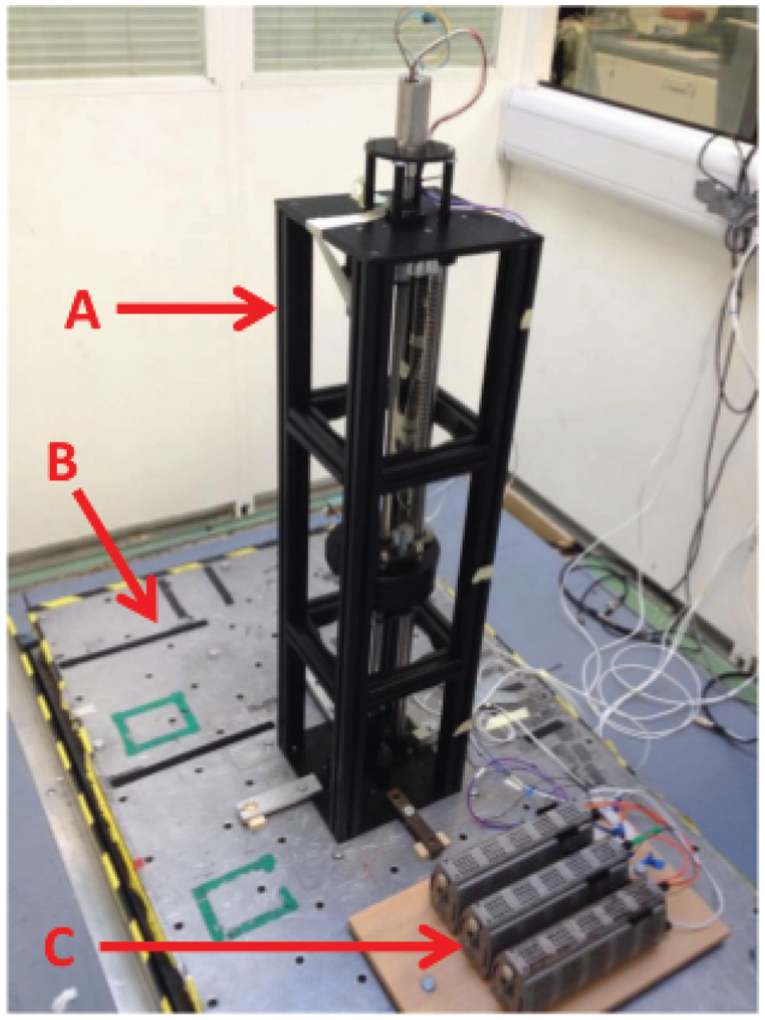
Actual implementation of energy harvester. A: Energy harvester device; B: shaker; C: variable resistors.
In the current article the aim is to establish a probabilistic model of the mechanical portion of the device and, as such, all of the tests shown here were conducted under open circuit conditions. The excitation was Gaussian white noise, filtered by a low-pass filter with a cut-off frequency of 15 Hz. The data used for system identification consisted of 2000 points of base acceleration time history
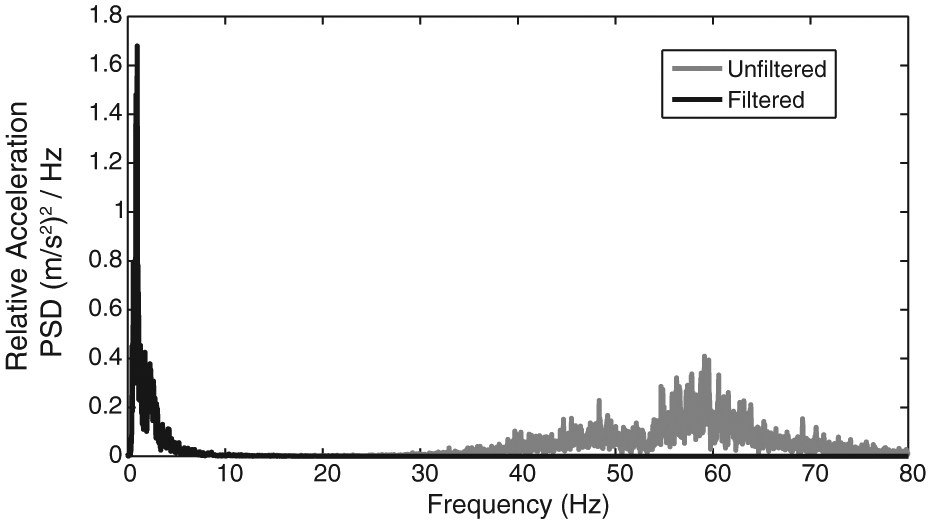
Filtered and unfiltered relative acceleration PSD.
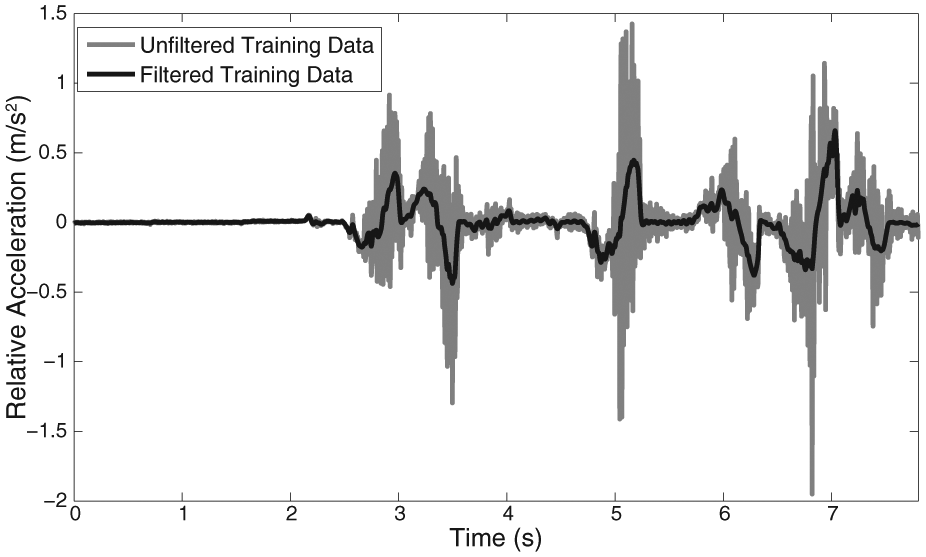
Filtered and unfiltered relative acceleration time history used as training data.
To give a more quantitative impression of the energy harvester performance, the amplitudes of the excitations used during testing were compared with the amplitudes that the device may experience when excited by wave motion. To that end, the vertical acceleration of a boat (a double hull catamaran weighing approximately 3.5 tonnes) was measured while sailing in the English Channel. In this particular case the maximum acceleration recorded was around 6 m/s2 while the maximum acceleration used during testing was roughly 4 m/s2, confirming that the base acceleration used during testing was similar to the amplitude of excitation that the device would be subjected to if it were used to harvest energy from wave motion (although this is obviously rather dependent on weather conditions).
Initial modelling
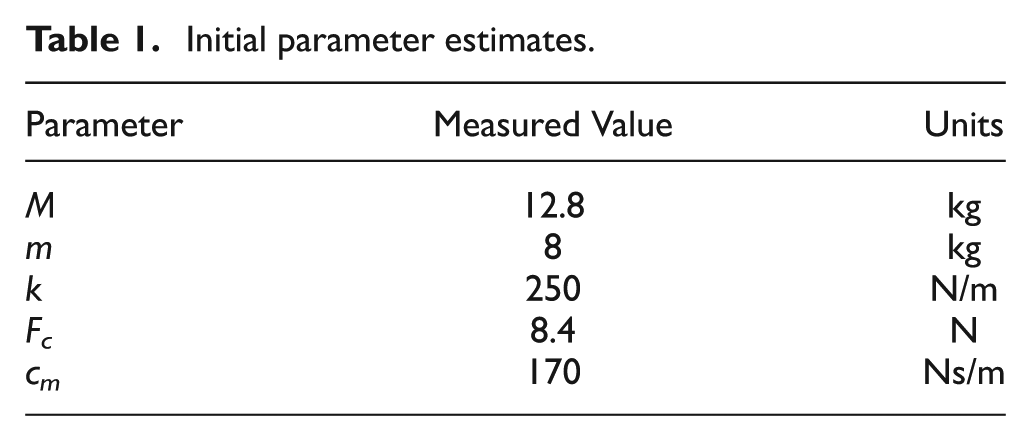
Before embarking on Bayesian system identification, several tests were performed to produce prior estimates of the model parameters. To estimate the static Coulomb friction (Fc) present in the device, the mass was displaced by an amount x1 downwards such that, as the mass was held in equilibrium, it follows that

Repeating this process but displacing the mass by the amount x2 upwards and noting that, to be in equilibrium

it follows that 2Fc≈k(x2 − x1). Using the estimated value of spring stiffness (250 N/m) and finding that x2 − x1 = 0.067 m, Fc = 8.4 N was used as a prior estimate for the static friction coefficient of the system. Subsequently, using a simple Coulomb damping model (such that
Initial parameter estimates.
A Bayesian approach
The task is now to use the experimental data

and

respectively. Equation (7) allows one to assess the relative probability of two competing model structures. This is a particularly important tool with regard to model selection because, as it can be shown, models are assigned higher probabilities if they are able to replicate the training data without being overly complex (see Muto and Beck, 2008, for a comprehensive discussion).
The first aim is to evaluate the ‘posterior parameter distribution’

where

so that the likelihood takes the form

where N = 2000. For the interested reader, a more thorough discussion on the choice of likelihoods is given by Simoen et al. (2013).
The denominator in equation (6) is a normalising constant given by

which is usually intractable and too time-consuming to evaluate numerically (as a result of the curse of dimensionality).
To generate samples from the posterior parameter distribution without having to evaluate equation (11), it is now common practice to employ MCMC methods such as the well-known Metropolis algorithm (Metropolis et al., 1953). MCMC essentially involves the creation of an ergodic Markov chain whose stationary distribution is equal to some target π(
Results
Linear model
Starting with a relatively simple model, it was first hypothesised that the friction effects present in the system could be modelled by increasing the viscous damping coefficient. Consequently, what is shown here is essentially a ‘Bayesian equivalent linearisation’ where the equivalent linear system is learnt from data. Acting under the assumption that M, m and k were estimated with sufficient accuracy, the vector of parameters to be estimated in this case was
Moments of the Gaussian prior distributions used for fitting the linear model.
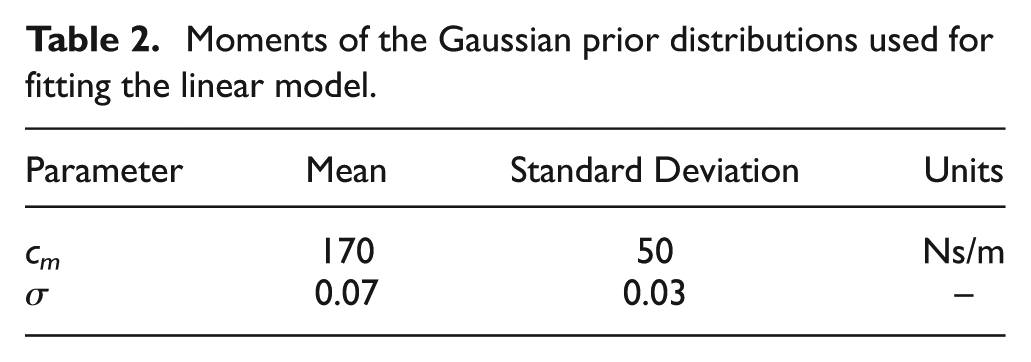
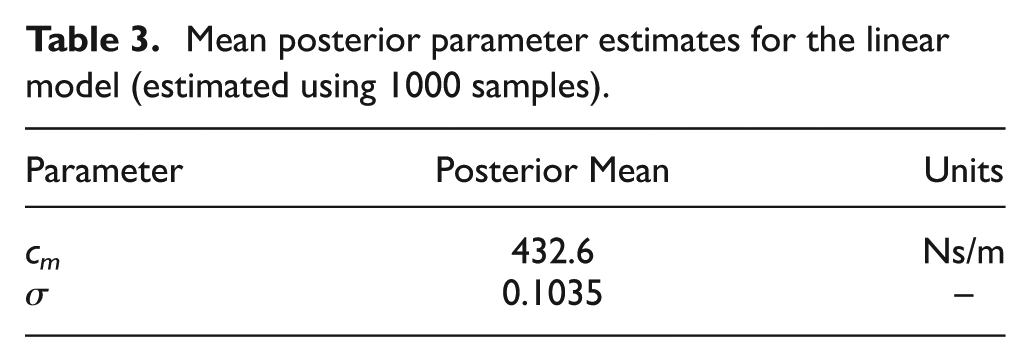
As described in the previous section, TMCMC (Ching and Chen, 2007) was used to generate 1000 samples from the posterior parameter distribution. Figure 6 shows the resulting samples from the posterior while the mean posterior parameter values are given in Table 3. With regard to Figure 6 it is interesting to note that the mean value of cm is approximately three times larger than the value that was estimated in ‘Initial modelling’, confirming that the system is strongly nonlinear.
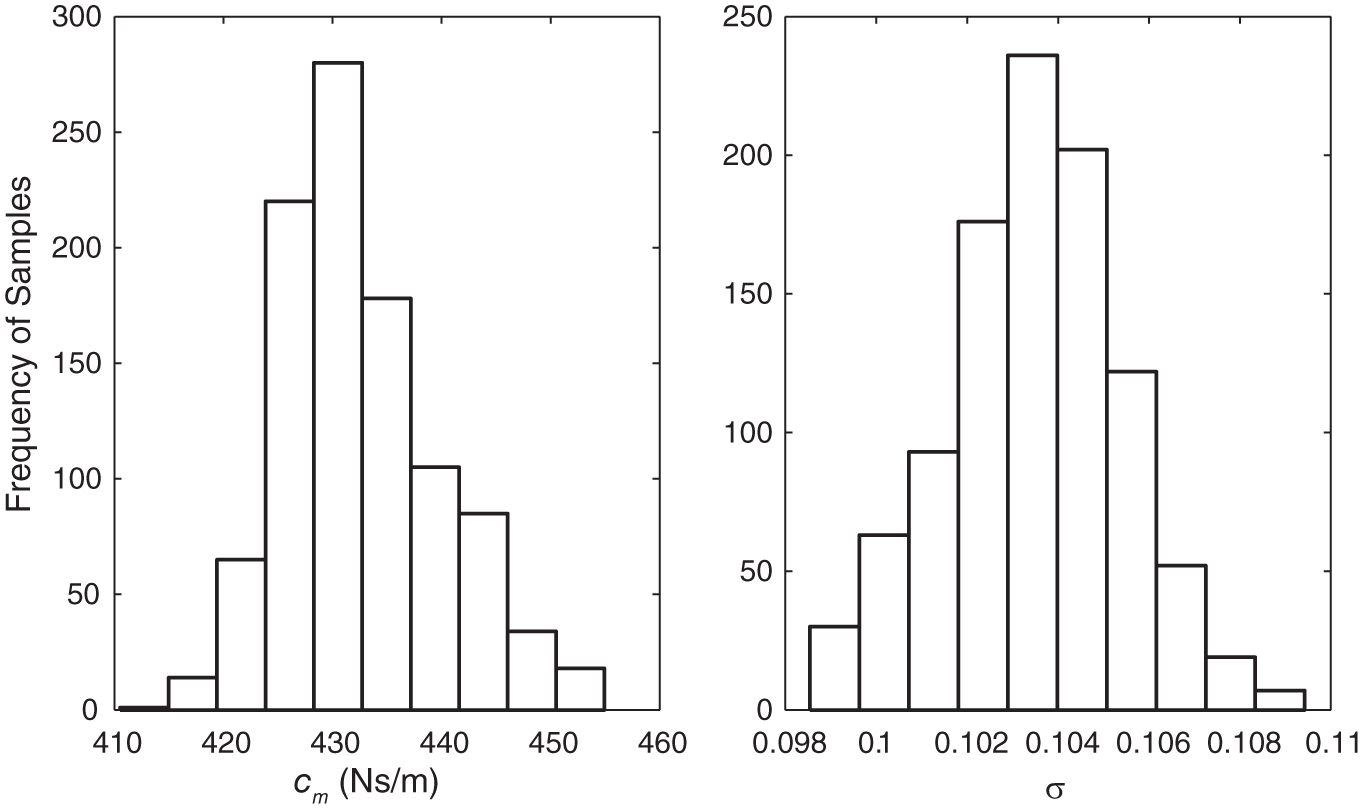
MCMC results for the linear model.
Mean posterior parameter estimates for the linear model (estimated using 1000 samples).
Running Monte Carlo simulations (where each simulation utilises parameters which, using MCMC, have been sampled from the posterior parameter distribution), an ensemble of model responses was generated. The mean response of this ensemble is compared with the training data in Figure 7, where the confidence bounds are three standard deviations from the mean. Clearly, the linear model is a poor representation of the real system; it is interesting to note that there are regions where the real device appears to be ‘sticking’ which the model is unable to replicate. Based on this observation as well as the damping-force plots shown by Cassidy et al. (2011), it was hypothesised that a hyperbolic tangent friction model may be a more appropriate choice.
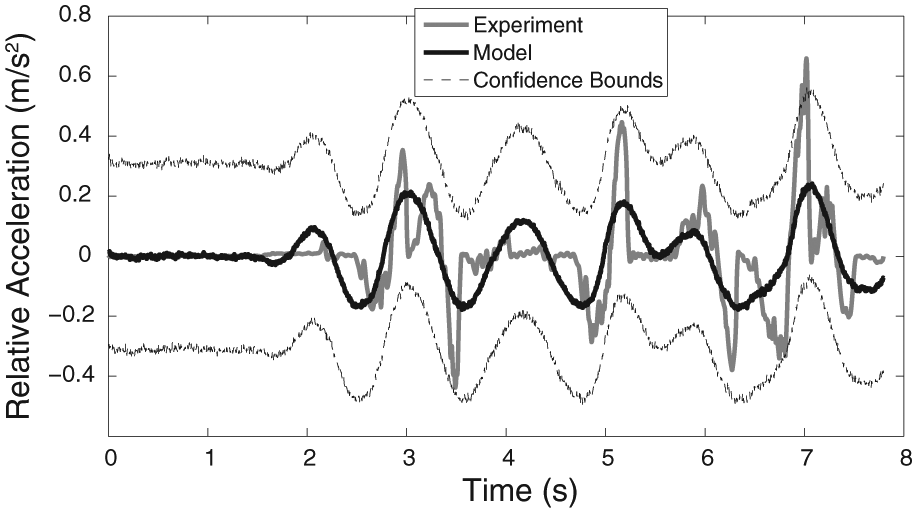
Comparison between the average response of the linear model (black) and the training data (grey).
Hyperbolic tangent
In this case a model of the form
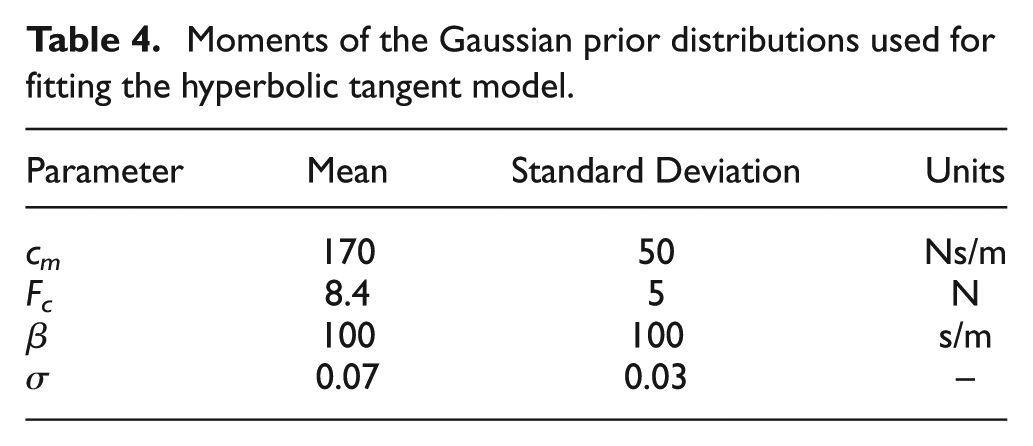
Moments of the Gaussian prior distributions used for fitting the hyperbolic tangent model.
The resulting samples from the posterior are shown in Figure 8 while the mean posterior parameter estimates are given in Table 5. It is encouraging to note that the mean values of cm and Fc are fairly close to those that were estimated in ‘Initial modelling’.
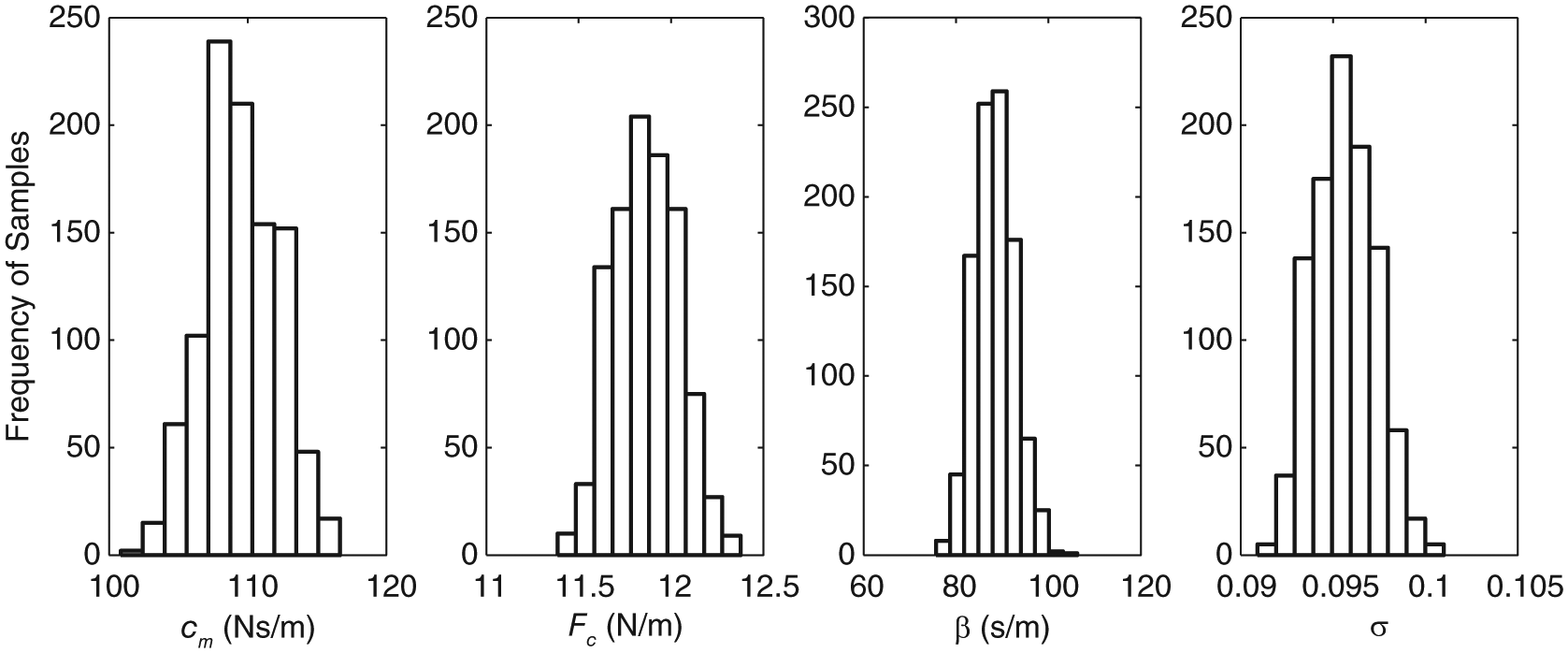
MCMC results for the hyperbolic tangent model.
Mean posterior parameter estimates for the hyperbolic tangent model (estimated using 1000 samples).
Finding that the model was able to replicate the training data well, its ability to predict 80 s of ‘unseen’ data – data which was not used to infer the parameter estimates – was investigated using Monte Carlo simulations. The average response of the model as well as the resulting confidence bounds are compared with experimental results in Figures 9 and 10: Figure 9 shows a small section of the model response while Figure 10 shows the full 80 s. It is clear that the model is able to make accurate predictions about the response of the real system and, although 1.3% of the measured response fell outside of the confidence bounds (a possible solution to this issue is discussed in ‘Discussion and future work’), there are no regions where the measured dynamics of the device are dramatically different from that predicted by the model.
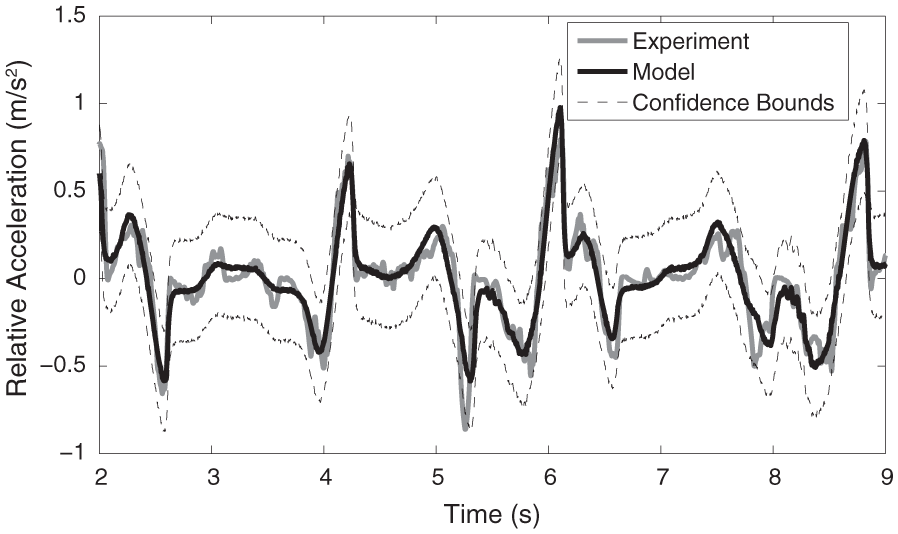
Comparison between the average response of the hyperbolic tangent model (black) and a small section of previously ‘unseen’ experimental data (grey).
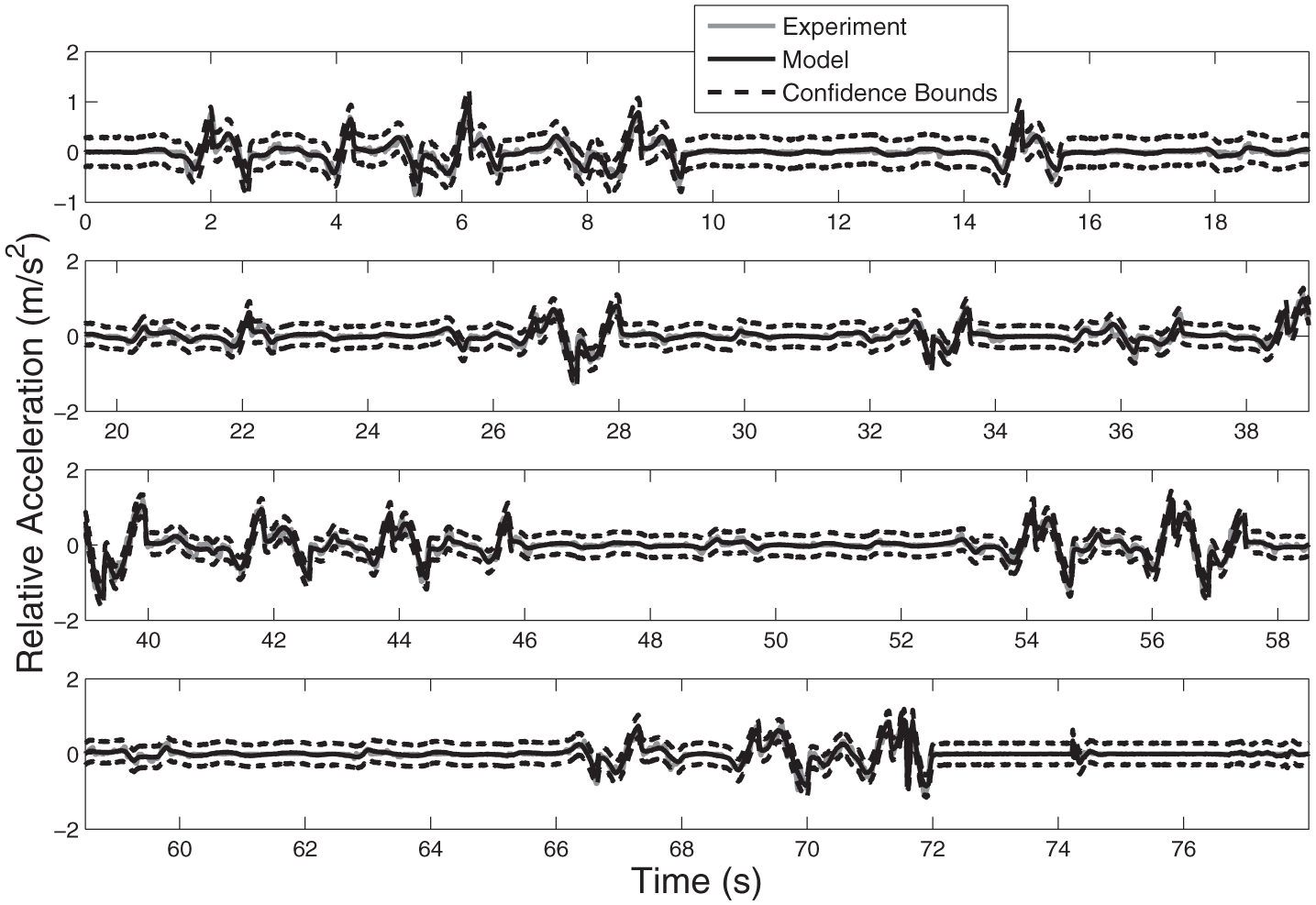
Comparison between the average response of the hyperbolic tangent model (black) and roughly 80 s of previously ‘unseen’ experimental data (grey).
Having used TMCMC to estimate equation (11) for both model structures, their relative probabilities could then be assessed using equation (7). Writing the linear and hyperbolic tangent model structures as

This helps confirm the belief that, relative to the linear model, the hyperbolic tangent model is the most probable. The end result, then, is a probabilistic model of a rotational energy harvester that can be used to make predictions which, by using samples from the posterior distribution, are robust against the uncertainties one has about the physics of the real system.
Discussion and future work
The work presented here has been focused specifically on the modelling of the mechanical portion of a rotational energy harvester. With a robust model established, an obvious next step would be to develop a probabilistic model of the electrical portion of the device. This could be achieved through using the base acceleration as the model input and then using the voltage output of the real device to infer parameter estimates. Subsequently exciting the model with ambient acceleration data, it would then be possible to make predictions about how the energy harvester would perform in real scenarios - these predictions would be robust against uncertainties in both the mechanical and electrical components of the model.
The authors plan to utilise the model developed in the current work to optimise this design of energy harvester, possibly using the work shown in Hendijanizadeh et al. (2014), such that its performance could be improved. The authors also intend to use a similar procedure to generate probabilistic models of inerter devices (which also utilise rack-and-pinion/ball-screw mechanisms) – this would be building on works such as Papageorgiou et al. (2009) where the modelling and testing of inerter devices was considered in detail. It is worth noting that, as an alternative to the rotational devices described here, there are also devices which utilise a ‘plucking-based’ method to achieve frequency up-conversion (Pozzi and Zhu, 2011) which are certainly also worthy of further investigation.
With regard to the hyperbolic tangent model, it was observed that the measured response fell outside of the confidence bounds more often than expected (although not by large amounts). It is conjectured here that this may be because the 80 s of data used for validation purposes may contain dynamics which was not present in the relatively small set of training data. An obvious solution to this issue would be to use larger sets of training data but, as numerical integration techniques were used in this case, such a strategy would greatly increase the computational cost of running MCMC. For future work the authors intend to address this issue using the methods presented by Green et al. (2014), where it was shown that small ‘information rich’ subsets can be extracted from large sets of training data and used to infer parameter estimates.
Finally, noting that some of the potential applications of rotational energy harvesters feature ambient excitations which can be approximated as white noise (the excitations which arise as a result of road roughness for example; Li et al., 2013), it may be advantageous to analyse the response of rotational energy harvesters to random excitations. This could draw on works such as Litak et al. (2010), Daqaq (2010), Green et al. (2012) and Langley (2014), where the response of nonlinear energy harvesters (including those which are designed to exhibit stochastic resonance) to white noise excitations has been extensively investigated.
Conclusions
This article is primarily concerned with the development of a robust, probabilistic model of a rotational energy harvester. Through the application of a Bayesian framework, a model of the device is inferred from a set of experimental data. It is then shown that the model is not only able to replicate nonlinearities in the real device (friction effects specifically), but is also able to make predictions which are robust against parameter uncertainties. For future work the authors aim to use this model to probabilistically analyse the ability of the device in question to harvest kinetic energy from high-amplitude, low-frequency excitations (such as those induced by ocean waves or the motion of human walking).
Footnotes
Acknowledgements
The authors would like to thank Dr Thibaut Putelat from the University of Bristol for his useful insights into friction modelling.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to acknowledge the EPSRC Programme Grant ‘Engineering Nonlinearity’ (EP/K003836/1) which funded this collaborative project.