
Abstract
Many medical (and ecological) processes involve the change of shape, whereby one trajectory changes into another trajectory at a specific time point. There has been little investigation into the study design needed to investigate these models. We consider the class of fixed effect change-point models with an underlying shape comprised two joined linear segments, also known as broken-stick models. We extend this model to include two sub-groups with different trajectories at the change-point, a change and no change class, and also include a missingness model to account for individuals with incomplete follow-up. Through a simulation study, we consider the relationship of sample size to the estimates of the underlying shape, the existence of a change-point, and the classification-error of sub-group labels. We use a Bayesian framework to account for the missing labels, and the analysis of each simulation is performed using standard Markov chain Monte Carlo techniques. Our simulation study is inspired by cognitive decline as measured by the Mini-Mental State Examination, where our extended model is appropriate due to the commonly observed mixture of individuals within studies who do or do not exhibit accelerated decline. We find that even for studies of modest size (n = 500, with 50 individuals observed past the change-point) in the fixed effect setting, a change-point can be detected and reliably estimated across a range of observation-errors.
Keywords
1 Introduction
When observing a changing outcome over time, using longitudinal data, the process may contain periods in which a marked or distinct change occurs in the underlying shape of the data. The distinct shift from one shape to another is called a change-point.
Change-point models – also known as change-point regression, switching regression, 1 changing regression, 2 two-phase regression, segmented regression, broken-stick regression, turning points 3 or bent-cable regression 4 – encompass a wide class of problems. They have been fitted to many longitudinal processes such as: modelling distinct changes in the rates of a Poisson process for mining accidents,5,6 changes in economic time-series trends, 7 extremes of climate, 8 modelling cognitive decline, 9 effect of calcium supplementation on blood pressure, 10 CD4 T-cell counts for HIV-infected individuals 11 and biomarker levels for prostate cancer12,13 (see also annotated bibliographies and overviews14–17).
In our research setting, which is primarily the study of the longitudinal effects of ageing, individuals experience cognitive decline. However, some individuals experience a period of steep decline, so-called accelerated decline. This naturally leads us to consider change-point models to account for the shift from typical decline to accelerated decline, but fundamental is the concept that not all individuals experience this change. Accelerated decline is a strong precursor of increased mortality and decreasing quality of life. Hence being able to identify sub-groups that are likely to follow different paths is an important area of research, and it is vital to invest in well-designed studies with sufficient statistical power.
1.1 Sub-groups
Within the change-point literature, there has been a focus on fitting a common underlying trajectory, with a change-point, to every individual and investigation of several aspects of this trajectory; for example, inferring the time of the change-point 18 or deriving statistical tests for the existence of a change-point. 19 However, in many real-world applications, the cohort may be heterogeneous, with individuals following different trajectories.
A key research question is to learn firstly, if there are different classes of individual and secondly, what features identify these individuals. The sub-groups of individuals, namely groups of individuals following different trajectories, are not observed and must be inferred; individuals are unlabelled within the data, hence the term unlabelled sub-groups.
Given a set of classes, there will be uncertainty when inferring the individuals’ labels, and some individuals will be incorrectly labelled, this is classification-error.
1.2 Incomplete follow-up
Attrition is a well-known problem in cohort studies20,21 and presents a specific challenge when considering change-point models. If the majority of individuals have dropped out of the study before the change-point, the statistical power to detect a change-point and attempts to classify individuals will be severely limited.
To account for attrition in longitudinal studies, we consider incomplete follow-up using a monotone missing assumption, that is when an individual misses a wave they do not return for any future waves; this drop-out mechanism is common to many cohort studies.
Under monotone missingness, we define a sample size metric, specific to the single-change-point model, which we term the expected post-change-point sample size. The expected post-change-point sample size combines the first wave sample size with the real-world problem of attrition in a manner that is intuitive for study designers.
Any discussion of incomplete follow-up must include the missingness mechanism, typically classed as either: missing completely at random (MCAR), missing at random (MAR) or missing not at random (MNAR). 22
We consider MCAR as a way to include incomplete follow-up in our investigation of classification-error and expected post-change-point sample size, without obscuring these aspects with complex missingness mechanisms, namely investigating how the proportion of random attrition impacts the power to detect a change-point and classification-error in relation to our newly defined sample size metric.
1.3 Bayesian framework
Change-point models have been considered using frequentist 23 and Bayesian5,24 approaches. In a Bayesian framework, the extension of the model to incorporate missing data is conceptually simple, though not always computationally possible. The aim of our paper is to investigate change-point models dealing with attrition; this requires a computationally tractable model.
We have two distinct forms of missing data, the unknown sub-group labels and incomplete follow-up. The missing sub-group labels are the motivation for our paper, whereas the incomplete follow-up is essential to the practical application of our results. These forms of missing data are simple to include in a Bayesian change-point model, resulting in a tractable likelihood. Hence, we decided to focus on Bayesian change-point models.
1.4 Study design
Study design for change-point models is challenging due to the non-linear nature of the model. Bischoff and Miller 25 derived frequentist optimal designs to detect the existence of a change-point in the single-path setting. Atherton et al., 26 also for the single-path setting but in the Bayesian framework, investigated the optimal location for observation times. There has been little work on optimal design for the so-called multi-path change-point problem, which is the setting of our paper, with repeated observations on multiple individuals.
In classical approaches to the investigation of study design, in particular sample size, closed form expressions (or reasonable closed form approximations) are used to obtain sample size formulae. The change-point model with unlabelled sub-groups and incomplete follow-up is of such complexity that even reasonable closed form expressions are unavailable. An alternative is to investigate the model using computational methods, and with the modern availability of computing power, it is feasible to conduct a simulation study to investigate classification-error. 27
The essence of study design is to define a set of criteria and optimise the design to achieve the best value of the criteria, typically under some constraints, e.g. cost and time. For example, randomised control trials are designed to detect a difference between treatments, while minimising the number of patients. We consider Bayesian study design, as we have elected to work in a Bayesian framework, but it is very similar in spirit to frequentist study design.
We define our design criteria to be the precision of parameter estimates, the power to detect a change-point and the classification-error. We may directly affect our criteria by altering the sample size, however as previously discussed, the naive first wave sample size is a poor metric, since we fail to account for attrition. Hence, we consider our expected post-change-point sample size as a combined feature, where the designer can determine a range of possible attrition rates and cohort sizes.
The final design aspects concern the form of the underlying trajectories and the measurements themselves. The measurement error is of fundamental importance as we would expect in sample size calculations, and is typically inherent to the outcome. In our two-class model, change and no change, the key feature of the trajectories is the shift at the change-point, which we term the change-magnitude. It follows that larger change-magnitudes would be easier to detect; however, the parameter that ultimately determines the separation between the classes is the magnitude of the measurement error relative to the change-magnitude. Hence, we consider a range of measurement errors to inform designs with differing measurement variability and also differing change-magnitude ratios.
1.5 Outline
In this paper, we perform a simulation study to investigate classification-error, and the power to detect a change-point, in a class of Bayesian (multi-path) change-point models with unlabelled sub-groups. This family of change-point models are commonly used to investigate change18,28 though this is a restrictive model (fixed effect), we have extended it to incorporate unlabelled individuals (for whom the sub-group to which they belong is unknown).
The focus of our paper is on the classification-error properties of the study design; within the model, we investigate there are many features to explore. For this paper, we consider two common design parameters: measurement error and attrition. Although we perform a simulation study, our generated data are inspired by the study of cognitive decline as measured by the Mini-Mental State Examination (MMSE), 29 where it is recognised that not every individual experiences a change and it is of interest to infer the change or no change label. Our setting allows us to gain insight into the issues of classification-error under sample size scenarios with incomplete follow-up and present guidelines for future study designs.
2 Methods
When reporting a simulation study, it is important to be clear on the aims, computation details and summary measures.30,31 First, we formally define the class of change-point model and the incomplete follow-up mechanism of interest. Next, the details of the Markov chain Monte Carlo (MCMC) method used for Bayesian inference are presented.
Our investigation is motivated by the study of cognitive decline in ageing; using this setting, we define the parameter ranges considered in our simulation study.
Finally, we discuss the issues of sample size determination in relation to our Bayesian approach, specifically the summary measures and statistical criteria for which a sample size is optimal.
The MCMC algorithm was implemented in custom written C code and run in parallel on several multi-core machines to obtain posteriors efficiently. All other analyses were performed using the GNU R statistical software.32,33
2.1 Change-point model
We consider the class of change-point models commonly known as broken-stick models with fixed effects. The underlying shape consists of a linear trend before and after the change point with potentially differing slopes such that there is no discontinuity at the change-point.
Of note, we extend the model such that each individual is a member of one sub-group with differing slopes around (i.e. before or after) the change-point. In this paper, we consider the case where each individual either experiences a change or not, i.e. there are two distinct sub-groups within the population with one group experiencing no change in the slope.
Individuals may have varying numbers of observations at varying times. Formally, let there be n individuals each with mi observations of the outcome yij at time tij, for
For our simulation study, we consider the case of each individual’s observations being aligned such that
Hence, our change-point model includes a mixture of two classes, the so-called no change class (also known as the stable class) and change class, with fixed underlying shape, see Figure 1 for an illustration.
Example illustration of the two distinct sub-groups: no change and change. The two linear segments meet at the change-point with no discontinuity.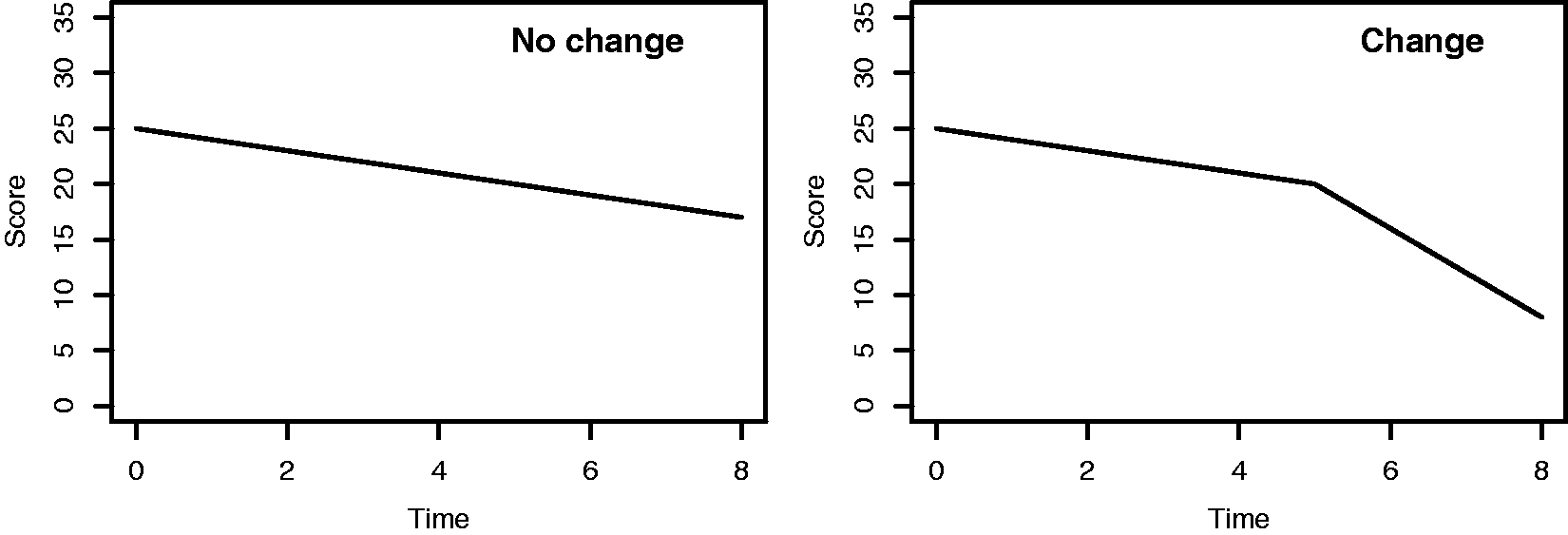
Using a fixed effects model, let α and β denote the intercept and slope respectively of the linear trend in the no-change sub-group. Define δ as the change-magnitude, i.e. the change in the slope after the change-point. The change-point is at some fixed time, c, for all individuals whom experience a change. Finally, the observation-error for each individual at each time point is denoted εij. Hence, the general form of this class of change-point models is

To ensure there is no discontinuity in the trajectory, the intercept of the change sub-group (r = 1) is set to
The model specification is completed by defining the probability of an individual experiencing a change,
2.2 Observation model
Cohort attrition is a significant problem in longitudinal studies, particularly if the aim is to detect the existence and impact of change-points. Hence, we incorporate incomplete follow-up into our simulation study.
When performing a simulation study, the data generating model must be fully specified.30,31 Hence, we must specify the time points at which observations are made and a drop-out mechanism for the incomplete follow-up; our so-called observation model, or equivalently a missingness model.
We consider an observational model with a minimally interesting drop-out mechanism to investigate classification-error, monotone random attrition. Individuals are observed at fixed time points, such that
In this paper, we keep the observation model constant across individuals, namely
This pattern of drop-out, where individuals do not return to the study at later time points, is common in cohort studies.
Under this model, drop-out is independent of sub-group, the missingness is so-called MCAR. 22 The unlabelled change-point model presented is not inherently limited to the MCAR setting. However, to focus on the novel unlabelled sub-groups aspect of the model, we use an MCAR profile in this study. Further work is needed to investigate the characteristics of our model within the more complex, and realistic, settings of MAR and MNAR. 22
2.3 Bayesian inference using MCMC
Within the Bayesian framework, we use Bayes rule to formulate the posterior of interest as the product of the likelihood of the observed data and the prior densities of the parameters. We observe

The likelihood is complicated by the observation model and unknown sub-group labels for each individual. In fact, for a general observation (i.e. missingness) model with unknown sub-groups the likelihood becomes intractable, meaning that we cannot evaluate the likelihood of a set of observations directly. It would require integrating over many possible missing data values, made more difficult as there are no closed form integrals or conjugate priors.
The likelihood is intractable due to the unlabelled sub-groups. To evaluate it, we need to integrate over both the change and no-change possible scenarios for each individual. Under a Bayesian approach, it is conceptually easy to add change-indicators,

Within our simulation study, we are assuming that drop-out is independent of sub-group, the so-called MCAR setting; hence, y is independent of pd. Further, combined with a constant drop-out probability,

Finally, the likelihood term involving the sub-group and outcome is separable, as the sub-group labels are augmenting the parameter space to make the likelihood tractable. Leading to the posterior

The mixture of two sub-groups and change-point leads to a non-standard form of the likelihood (i.e. no conjugate prior), and hence the requirement to use Metropolis-Hastings (MH) updates within an MCMC scheme. The proposal distributions within each MH update were of standard forms. However, there is an interesting aspect to the dispersion of the proposals that we will return to in Section 2.4.
The MCMC chains were run for 105 iterations and, as is standard practice, an initial block of 103 iterations were discarded as burn-in. Further, only every 50th iteration was retained, so-called thinning, to reduce the auto-correlation of the approximately 3000 remaining samples from the posterior density.
2.4 Simulation study
The family of change-point models, combined with an observation model, as defined in Sections 2.1 and 2.2, have many parameters to consider. Within the scope of this paper, it would not be feasible to consider the full parameter space, due to limits of space and clarity in presenting our results.
If we consider a common study design question, determining a sufficient sample size to reliably detect a pre-defined effect size, a key consideration is the measurement error; more noisy observations require a larger sample size. In our setting, with unlabelled sub-groups, noisy measurements are an obvious feature to investigate. The magnitude of the pre-defined effect size is important, but mainly its magnitude relative to the measurement error.
As already discussed, incomplete follow-up is an important feature of longitudinal study design. Hence, we should consider a parameter from the observation model within our simulation study; in our case, the only parameter is the drop-out probability. As will be discussed in Section 3, we present our results in terms of a sample size summary measure, the expected post-change-point sample size, which reduces the complexity in presenting our results.
There remain several other parameters within equation (2), which we can broadly group into three categories as the focus for future work: observation, shape, and sub-group. Parameters concerning the observation model (i.e. the missingness model), such as the number and timing of observations, and drop-out mechanisms, lead into future investigations of more interesting dependent missing mechanisms (i.e. MAR and MNAR). Parameters concerning the shape of the process, namely the slope, intercept, change-magnitude and change-point, are important for translating the results to other settings, but they are inherently linked to the observation-error; thus, we feel that for our first investigation the observation-error is sufficient. As an intuitive comparison, consider a common approximate approach to determining the sample size for a two sample t-test comparing two population means which only requires the ratio of the variance and effect size 38 ; hence, the relative magnitudes of the shape parameters and observation-error are of key importance. Finally, parameters concerning the sub-group labels, which determine the relative numbers of individuals in each group, are set to generate equally likely sub-group membership in this paper, which will likely correspond to a best case scenario for classification.
Thus, we consider two features of our extended change-point model: the effect of the observation-error, τ, that is noise or measurement error and the drop-out parameter, pd. We investigate the interaction of varying τ − pd over different first wave sample sizes in a simulation study.
For a simulation study, we must generate many simulated data sets at a range of parameter values. Rather than considering abstract scales for the parameters, we use a motivating real-world application, modelling cognitive decline in ageing as measured by the MMSE.29,39 Change-point models have previously been applied in the field of ageing and cognition, 40 and for the MMSE in particular 41 which we use as a basis for our parameter ranges.
The MMSE is measured on a scale from 0 to 30, with scores greater than 25 considered normal cognition. Although the MMSE is discrete, and our focus is on a continuous outcome, assuming discrete outcomes as continuous is common and we primarily use the MMSE to motivate otherwise arbitrary parameter values. As all our individuals are aligned, such that
In keeping with our motivating example of studies of cognition in ageing and a yearly time scale, typical studies last five to 10 years with three to five observations (or waves). Thus, we assume five observations at fixed time points for all individuals. Namely,
In summary, the parameter values derived from our motivating example, modelling cognitive decline in ageing, are
Within our simulation study, it only remains to specify the range of the observation-error and drop-out parameters. We consider three error-precisions,
For each of the 15 possible scenarios, three observation-errors and five drop-out probabilities, we generated 150 data sets consisting of 500 individuals. Each individual experiences a change or not, and either has complete information or drops out.
To assess the impact of sample size, we restrict the number of individuals used from each simulated data set. The subsets were defined by restricting to the first k individuals in each data set,
Having defined the parameter values from our motivating example, it is possible to discuss the scales of the prior and proposal distributions within our Bayesian analysis. The priors are all uninformative and proper
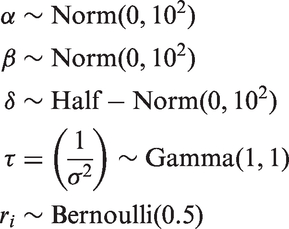
We use a half-normal prior on the change-magnitude, δ, to aid identifiability and, in the case of cognitive decline, the direction of change is known a priori.
The proposal distributions require a slight adaption due to our focus on sample size. With larger sample sizes, the posterior variance is expected to be smaller; hence, using the same proposal distribution across all simulated data sets will induce different mixing and acceptance rates, potentially distorting the comparison across sample sizes. To minimise this, the variance of each proposal distribution was scaled based on the number of observed individuals. Thus, the proposal distributions were
In a real application, it may be beneficial to use an adaptive update scheme to improve the efficiency of the MCMC chain. In our simulation study, this deterministic adaption was sufficient.
2.5 Bayesian sample size
Frequentist sample size calculations have a long history, particularly in medical research due to clinical trials, and are typically framed in terms of hypotheses with Type I and Type II errors. The null hypothesis, significance level, alternative hypothesis, and desired effect-size combined with optimality criteria define the required sample size.
Bayesian sample size is slightly different and is split into two main types: model comparison using Bayes Factors, which may be extended to a fully decision theoretic approach; or inferential approaches (see Adcock 42 and Pezeshk 43 for a review).
The fully decision theoretic approach44,45 is the preferred method, accounting for the prior distribution and incorporating a loss-function to quantify the cost of a decision. However, to avoid further complicating the results, and how to translate them to different settings, we discount the use of utility functions as they are very application specific.
The Bayes Factor approach
46
compares the marginal posterior probability of the data, D, under two models, which can be taken as equivalent to the null and alternative hypotheses in the frequentist approach. The Bayes Factor comparing two models is defined as the ratio of the marginal posterior of the data under each model,
The remaining Bayesian approaches are termed inferential, 43 for example the average length criterion (ALC) and posterior moments. The ALC is defined as the average length of the ν% highest posterior density (HPD) interval. The HPD interval is a form of Bayesian credible interval, which is often compared to frequentist confidence intervals (although a confidence interval and a credible interval are two distinct concepts and typically would not coincide). Sample size is then defined in terms of a minimum desired ALC. Thus, the ALC is a sample design criterion, akin to setting the desired significance level and power in a frequentist design setting. Simpler than the ALC, sample size can be defined in terms of a minimum desired posterior moment, such as median, mean or variance.
In our investigation, for the intercept (α), slope (β), change-magnitude (δ) and error-precision (τ), we consider the error in the estimated posterior median, the variance of the posterior and the 95% ALC. For the change-indicators (r), we analyse the classification-error.
2.6 Simulation summaries
For each scenario, we generated 150 data sets, each generating a posterior sample using the MCMC scheme in Section 2.3.
For the intercept (α), slope (β), change-magnitude (δ) and error-precision (τ), we compute the posterior median from each data set within a scenario, s, and summarise all data sets using the MAE

Again, for the intercept (α), slope (β), change-magnitude (δ) and error-precision (τ), we compute the posterior variance and 95% ALC and summarise all data sets using the mean of the variance or ALC

We note that the overall summaries are based on 150 data sets. Hence in addition to the error due to using a finite sample from the MCMC posterior, there will be further Monte Carlo error due to using a sample of all possible data sets. 49 The decision to use 150 repetitions of each scenario is in line with other simulation studies and gives sufficient insight into the relationship of interest.
Within our change-point model, there are two distinct sub-groups, change and no change. This naturally leads to two questions: whether there is a change at all, namely whether
In the classical sample size framework, the Type II error, or power, of the test is the ability to detect a difference when one exists. In the Bayesian framework, we could perform model selection comparing the base δ = 0 against
Finally, we summarise the classification-error for each scenario. In our simulation study, the true ri is known for each individual and we can obtain a posterior probability for whether they experienced a change or not. We plot receiver operating characteristic (ROC) curves as the true positive rate against the false positive rate ranging over all thresholds. In this instance, the posterior of each ri can be summarised as the probability of being assigned to the change class; we then vary the threshold of assignment to the change class from zero to one. To summarise ROC curves, it is common to compute the area under the curve as a measure of classification-error, our area under the ROC (AUROC). By definition, an AUROC of one corresponds to a perfect classifier and an AUROC of half is random assignment.
3 Results
We first illustrate several simulated data sets, to present the qualitative nature of our scenarios and to highlight the noisy properties of the simulated data. Despite having the true generating parameters, we do not expect to recover them perfectly nor do we expect to be able to avoid classification-error.
Within our simulation study, we ran 20,250 MCMC chains covering 150 repetitions of all scenarios: three error-precisions, five drop-out probabilities and nine samples sizes. Given the number of MCMC chains, we considered summary measures of the acceptance rates and convergence; both were sufficient for valid inference under our implementation (see Appendix for further details).
Our aim is to gain insight into the relationship of sample size and classification-error, focusing on the error-precision and drop-out probability. Even moderate tabulated output would be far too verbose, thus we present graphical representations of our results that more succinctly illustrate our findings.
In the following sections, we plot the summary measures defined in Section 2.6 by error-precision against the expected sample size post-change-point. The plots show the mean for each scenario, omitting the uncertainty due to Monte Carlo error for clarity, and LOWESS52,53 curves to highlight the trend across the scenarios.
Using these summary plots, we assess change-point detection and classification-error under varying post-change-point sample sizes. Although not our main focus, we also consider the three shape parameters: intercept (α), slope (β), change-magnitude (δ); and inference on the error-precision (τ) itself.
3.1 Example data sets
Our change-point model was coded in the R statistical software package
32
and for each scenario – defined by
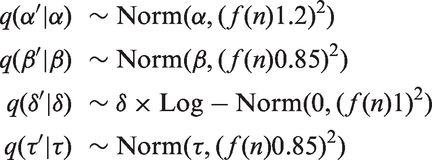
Figure 2 illustrates five example data sets with n = 75 individuals and common intercept (α = 25), slope ( Example data sets under different scenarios with n = 75 and common intercept (α = 25), slope (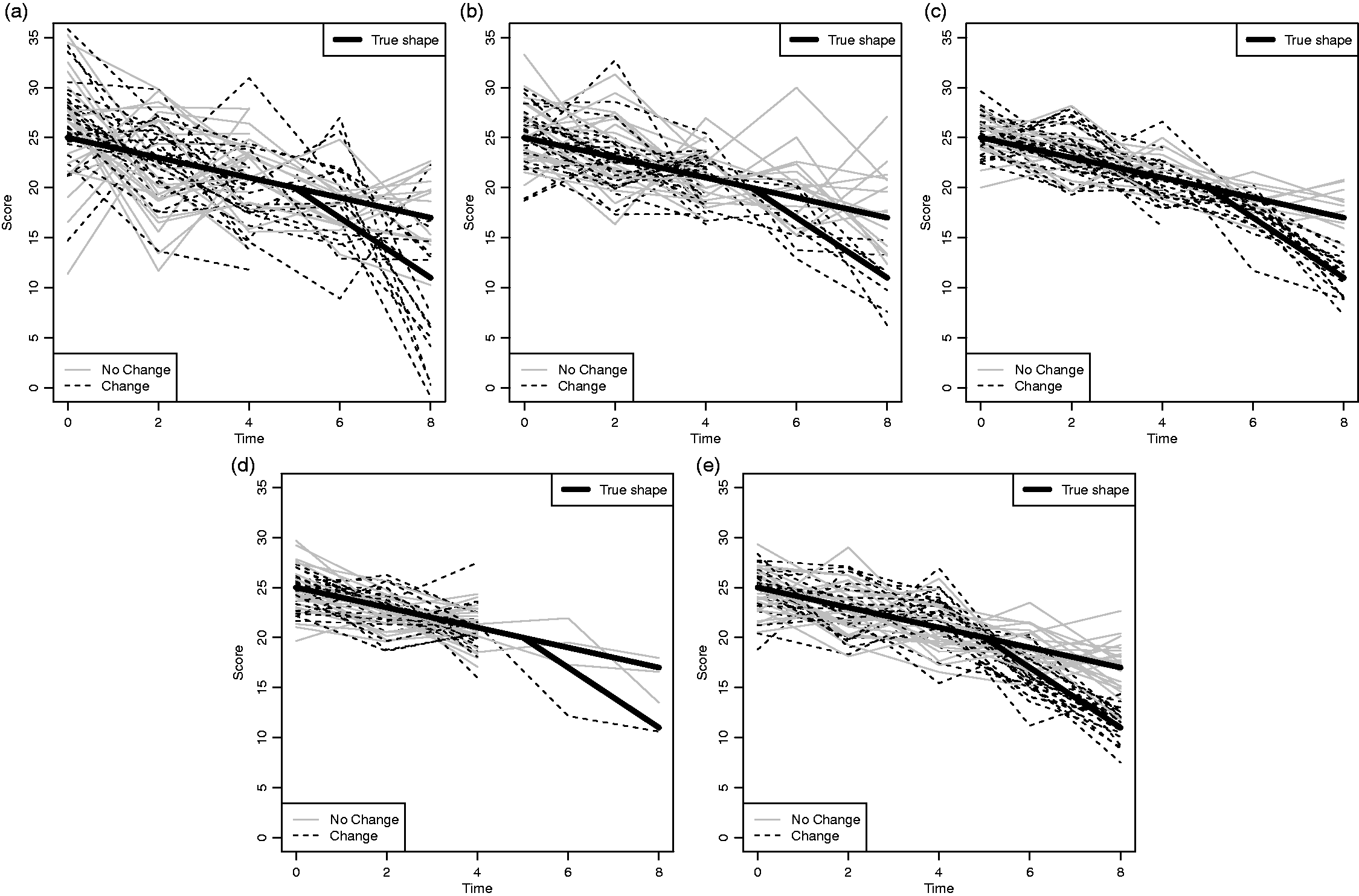
In our model, each individual is a member of the change or no change class. Figure 2 shows that some individual’s observations are at odds with their sub-group due to observation-error. For example, in Figure 2(b), there are individuals whom did not experience a change (solid grey line) but have similar final observations to those who did experience a change (dashed black line), and vice versa.
3.2 Existence of a change-point
To consider the question of classification-error, we must first determine whether distinct sub-groups exist. There are two degenerate cases, in the first a change-point exists and all individuals experience a change. The other degenerate case is when no change-point exists, i.e. the change-magnitude is zero, and all individuals experience no change.
The case of no change-point presents an identifiability issue for our model. If the change-magnitude is truly zero, then the change and no change sub-groups follow identical shapes; meaning the labels are ill-defined. Conversely, the case of all individuals experiencing a change given a non-zero change-magnitude is well defined, since the labels correspond to distinct shapes.
Hence, before we can consider classification-error, we must first address the existence of a change-point, i.e. check for a non-zero change-magnitude. As discussed in Section 2.5, we could model the existence of a change-point and, using Bayes Factors or variable selection approaches, obtain appropriate posteriors. However, for the reasons discussed earlier, we shall not directly compare the evidence for a change-point but instead consider the posterior probability of the change-magnitude being non-zero. Recall, by definition
Figure 3 plots Mean posterior probability of change-magnitude, δ, being less than (a) –0.05, (b) –2, and (c) –3; given the true change magnitude is 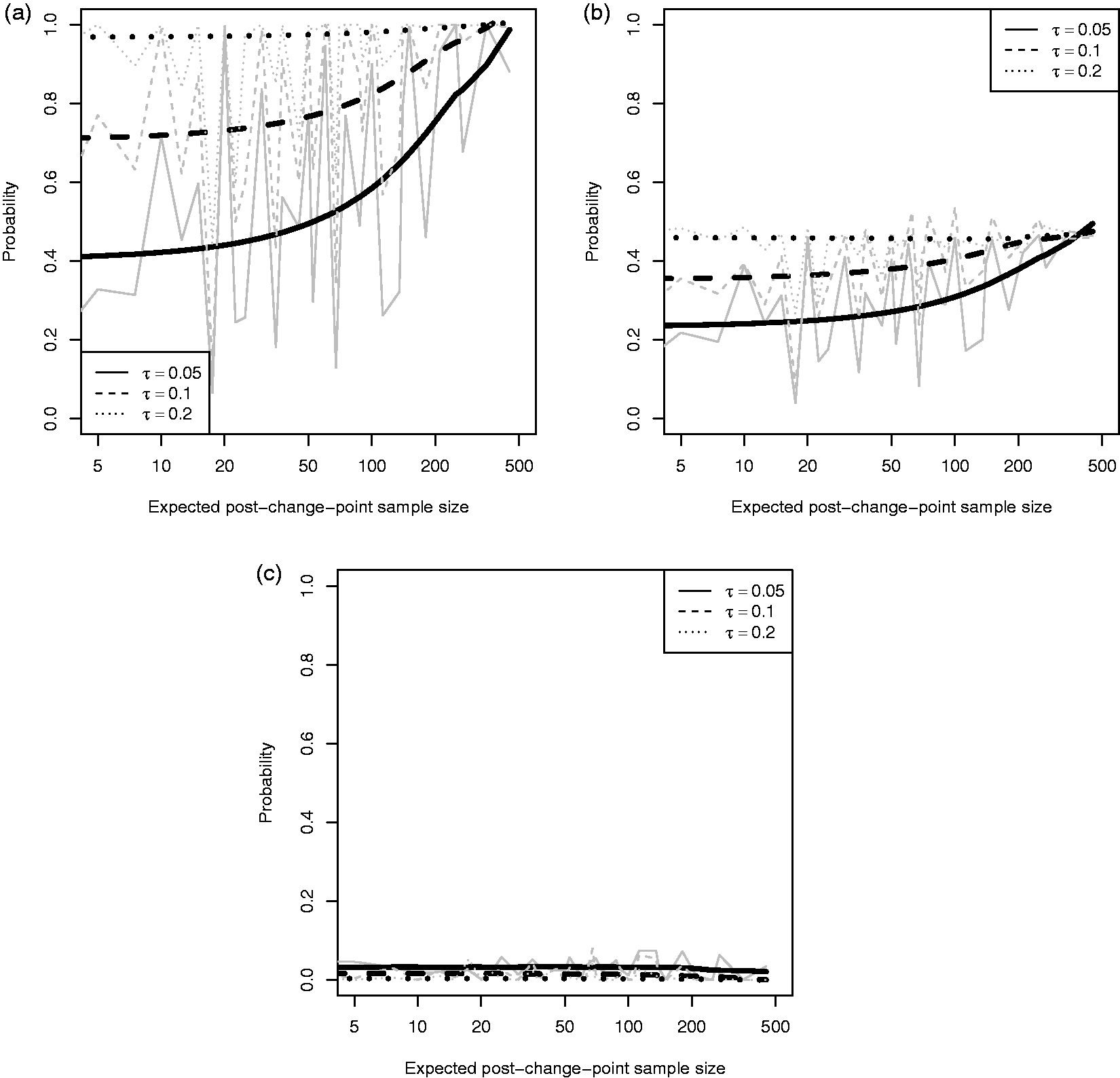
Figure 3(a) reflects our explanation of failing to detect a change-point. We see for the smallest error-precision scenario,
Note that Figure 3(a) only indicates that the posterior density is away from zero, not that it is centred around the true parameter. It is perhaps concerning that even for large post-change-point sample sizes, say 200 individuals, under our reasonable error-precision (
Assuming reliable inference, we would typically expect the posterior to be approximately symmetric about the true parameter value (
Finally, to illustrate the directionality of the inference, Figure 3(c) plots the posterior probability of a change-magnitude smaller than –3. Note that the order of the three error-precision lines is reversed on this plot compared to Figure 3(b), as we are considering the opposite tail of the posterior; namely the solid line corresponding to
3.3 Classification error
Classification is inference at the level of individuals, unlike inference on the change-point model parameters which is at the population level (in a fixed effects model). Classification-error concerns differences between an individual’s true label and their inferred label. However, this comparison is only well defined, if both the true and inferred labels are interpretable. That is, unless we first confirm the existence of a change-point the inferred labels, change and no change, are meaningless. Hence, change-point detection is more fundamental to our problem.
We first consider the issues of ill-defined labels. Then, once we have determined the existence of a change-point, following Section 3.2, meaning that our change and no change labels are well defined, we can consider the accuracy of classification.
Figure 4(a) plots the mean AUROC by error-precision over a range of post-change-point sample sizes. Counter to our expectation, the classification-error becomes greater for larger sample sizes and appears to be tending to an AUROC of 0.5, i.e. random labelling. We do not expect classification to become worse with an increasing sample size.
Area under ROC curve for (a) all individuals and (b) only those individuals with observations after the change-point. The plot for all individuals seems to indicate larger sample sizes lead to a loss in accuracy, but this is an unfair comparison due to the inclusion of individuals who drop-out before the change-point – their classification is ill defined. Hence, the second plot considers only individuals with observations past the change-point.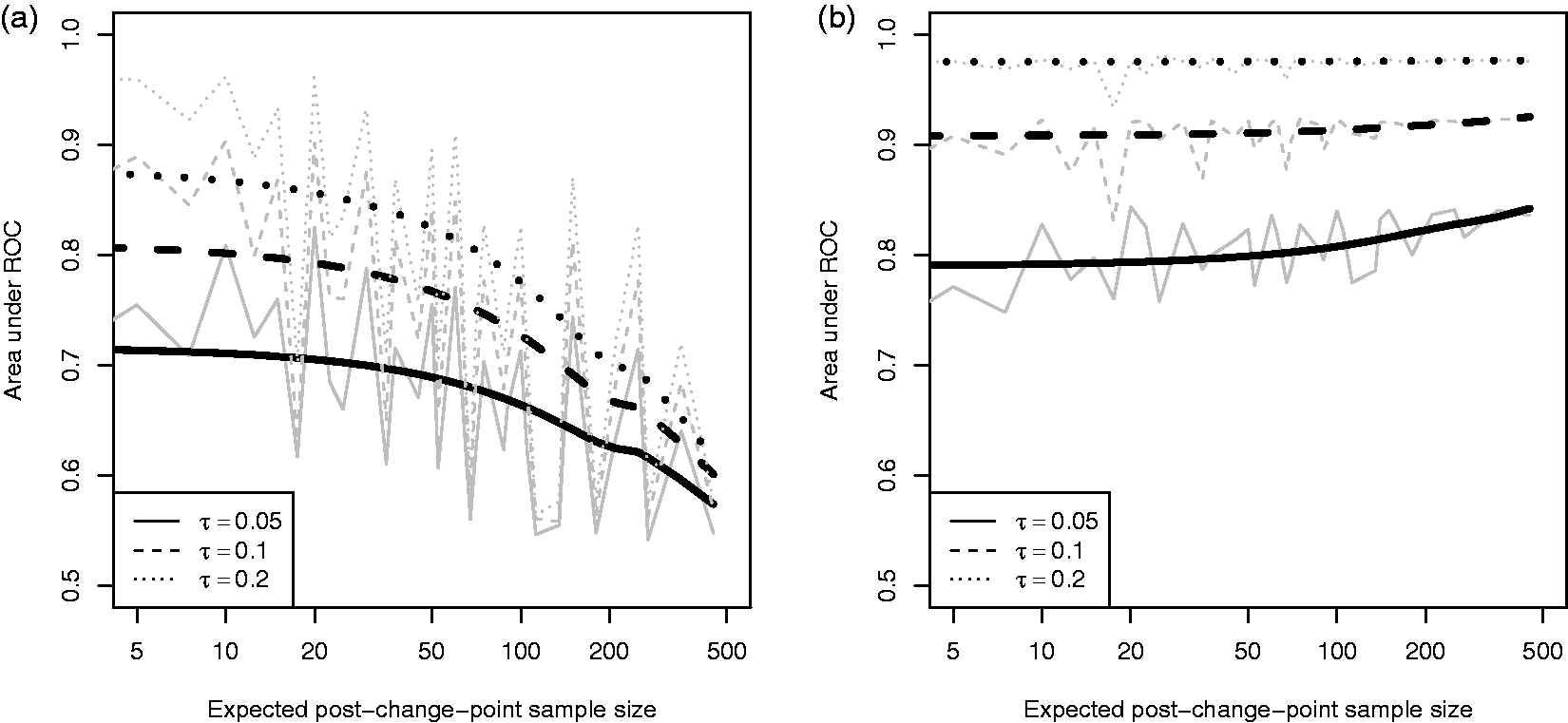
Recalling our simulation setting from Section 2.4, individuals who drop-out are lost to follow-up before the change-point, so they cannot really be in either the change or no change group. This issue arises since we are considering inference at the individual level, unlike in Section 3.2, where at the population level the question of the existence of a change-point is well defined.
In fact, we might consider these individuals to be in a distinct third group, for whom the question of whether they experience, a change-point is ill defined. Such a group is distinct since individuals are MCAR, and the drop-out probability is independent of sub-group. Hence, there is no information in the observed data (scores y and times t) to inform the sub-group label for individuals with incomplete follow-up; they will have random labels. Thus, for these individuals, the AUROC will approach a half.
Typically at larger post-change-point sample sizes, there are more individuals with incomplete follow-up, leading to a large number of random labels. These random ‘true’ labels will lead to many mis-classification errors from our inference, since both the ‘true’ label and posterior label will be random the probability they coincide is dependent on the proportion of change and no change individuals in the population.
For our setting, with known fixed change-point location and MCAR drop-out, we can exactly define three distinct sub-groups: change, no change and dropped-out before change-point. Figure 4(b) plots the classification-error for the subset of individuals with observations past the change-point, that is individuals for whom classification into change or no change is well defined. Hence, we have removed the effect of including the dropped-out individuals. Immediately, we see that classification improves with sample size, as we expect.
When interpreting Figure 4, we must account for detecting a change-point as indicated by Figure 3. Until a change-point is reliably (we deliberately leave the term reliably undefined) detected, the AUROC appears steady, then begins to climb slowly. Even at the largest post-change-point sample sizes, we do not achieve perfect classification. Further, there is an indication that for increasing sample size the AUROC is levelling out to some limiting value. This is in keeping with our earlier observations on Figure 2 that there exist individuals with observed outcomes that are closer to the opposite sub-group, namely some individuals in the no change group have outcome scores – due to the observation-error – close to the change group. Hence, we do not expect to recover perfect classification.
We must also consider that for a post-change-point sample size of 10, combined with an equal chance of experiencing a change or not (
At moderate post-change-point sample sizes, the probability of detecting a change-point increases. However, the simulation study summaries of the Bayesian posteriors for the change-magnitude (δ) will reflect this uncertainty by becoming a mixture of two distributions: no change with posterior mass around zero and change with posterior mass around two. Hence, Figure 3 is really summarising a bimodal distribution. Bimodal distributions are poorly characterised by the variance and ALC (the ALC being ill defined when the posterior is multimodal), which we shall consider in Sections 3.5 and 3.6, so it is important to consider all results in the context of the existence of a change-point.
3.4 Post-change-point sample size
In study design, the often asked question is the required sample size. This is well defined in single time point studies, for example the classic comparison of means between two groups. However, in the longitudinal setting, we have the additional complexity of attrition.
The problem of attrition is especially troubling in a change-point model; in the worst case scenario, we might lose all individuals before any experience the change-point. There are some parallels with designing studies to investigate time-to-event processes, requiring long enough follow-up to capture sufficient events to make inference.
With that background in mind, we proposed a convenient metric to encapsulate both the first wave sample size (at time t1) and attrition; our so-called expected post-change-point sample size. This metric has the benefit of focusing study designers thinking on the key aspect of the change-point process, while still being a univariate summary of the sample size.
For our cognitive decline inspired process defined in Section 2.4, we have two observation times beyond the change-point (c = 5) and drop-out time (td = 4); both of which are fixed for all individuals. Thus, for a given sample size, n, and drop-out probability, pd, there is an expected number of individuals who should be observed at the last observation (
There are two important observations about our metric. Firstly, it is possible to achieve the sample expected post-change-point sample size with different first wave sample sizes. For example, n = 100 coupled with
In Figure 5 we illustrate the benefit of considering our results in terms of the expected post-change-point sample size using the bias in estimating the change-magnitude parameter, which we shall consider in more details in Section 3.5. The change-magnitude parameter, δ, is reasonably “well behaved” and clearly dependent on the number of observations post-change-point.
Mean absolute error of the posterior median estimate of the change-magnitude, δ, plotted against (a) the first wave sample size and (b) our expected post-change-point sample size. We highlight three expected post-change-point sample sizes: 15, 45 and 90, and the (c) the corresponding first wave size, n, and drop-out, pd, paris.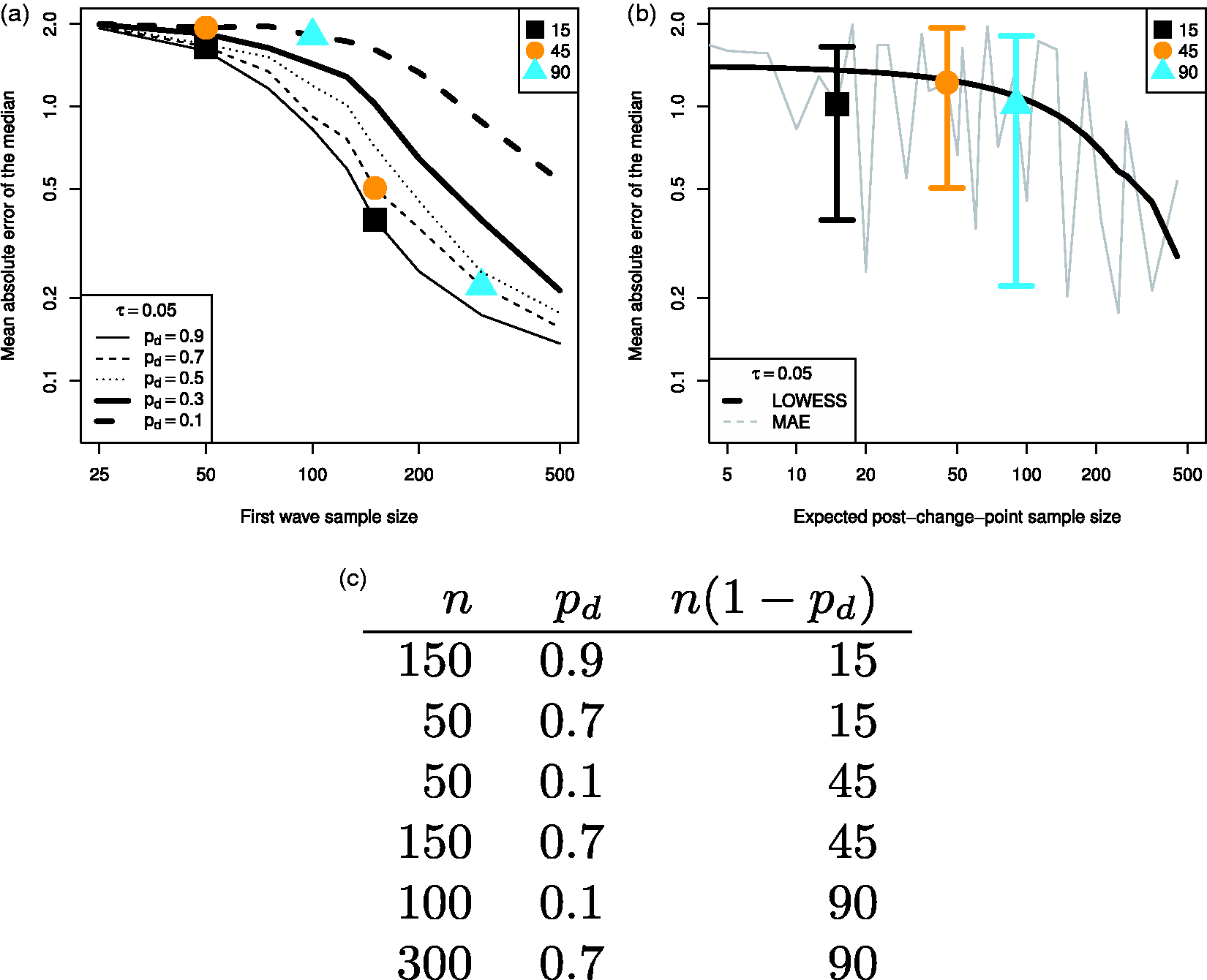
Figure 5(a) presents the mean absolute error for the change-magnitude (δ) parameter when
The general pattern, larger sample size leads to less bias, is clear across both plots. However, the interaction of attrition and first wave sample size in Figure 5(a) is, even for the “well behaved” change-magnitude, complex and highly non-linear. Conversely, Figure 5(b) presents a noiser picture in the raw data, but a clearer understanding of the impact of observations after the change-point on our ability to make inference. This is particularly important more complex questions of change-point detection in Section 3.2 and classification-error in Section 3.3, where our message is that post-change-point sample size is a key consideration. However, we acknowledge, as clearly shown in Figure 5(b), that our simple metric exhibits variability. Hence, our use of LOWESS curves highlights the trends of interest.
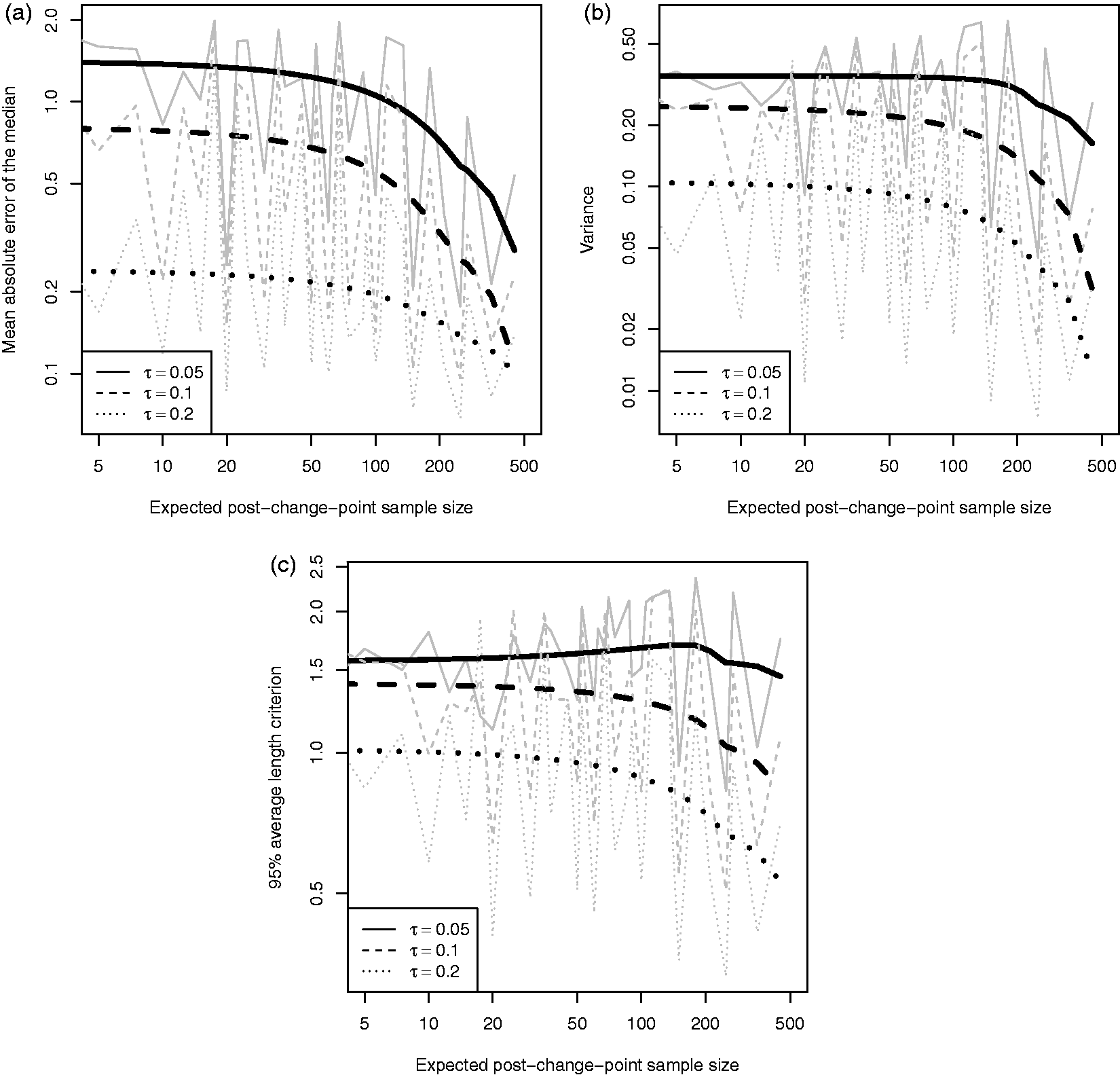
3.5 Intercept, slope and change-magnitude
Our change-point model, defined in equation (1), has three parameters that determine the underlying shape: the intercept (α), slope (β) and change-magnitude (δ), see Figure 1. Figures 6 to 8 plot: (a) the mean absolute error of the posterior median, (b) the mean posterior variance, and (c) the 95% ALC against the expected post-change-point sample size, namely Summary measures for the intercept (α) parameter over a range of post-change-point sample sizes: (a) mean absolute error of the posterior median, (b) mean posterior variance and (c) 95% ALC. Scenarios are grouped by the true observation-error (solid, dashed and dotted lines). Simulation summaries are grey lines and LOWESS curves are black. Summary measures for the slope (β) parameter over a range of post-change-point sample sizes: (a) mean absolute error of the posterior median, (b) mean posterior variance and (c) 95% ALC. Scenarios are grouped by the true observation-error (solid, dashed and dotted lines). Simulation summaries are grey lines and LOWESS curves are black. Summary measures for the change-magnitude (δ) parameter over a range of post-change-point sample sizes: (a) mean absolute error of the posterior median, (b) mean posterior variance and (c) 95% ALC. Scenarios are grouped by the true observation-error (solid, dashed and dotted lines). Simulation summaries are grey lines and LOWESS curves are black.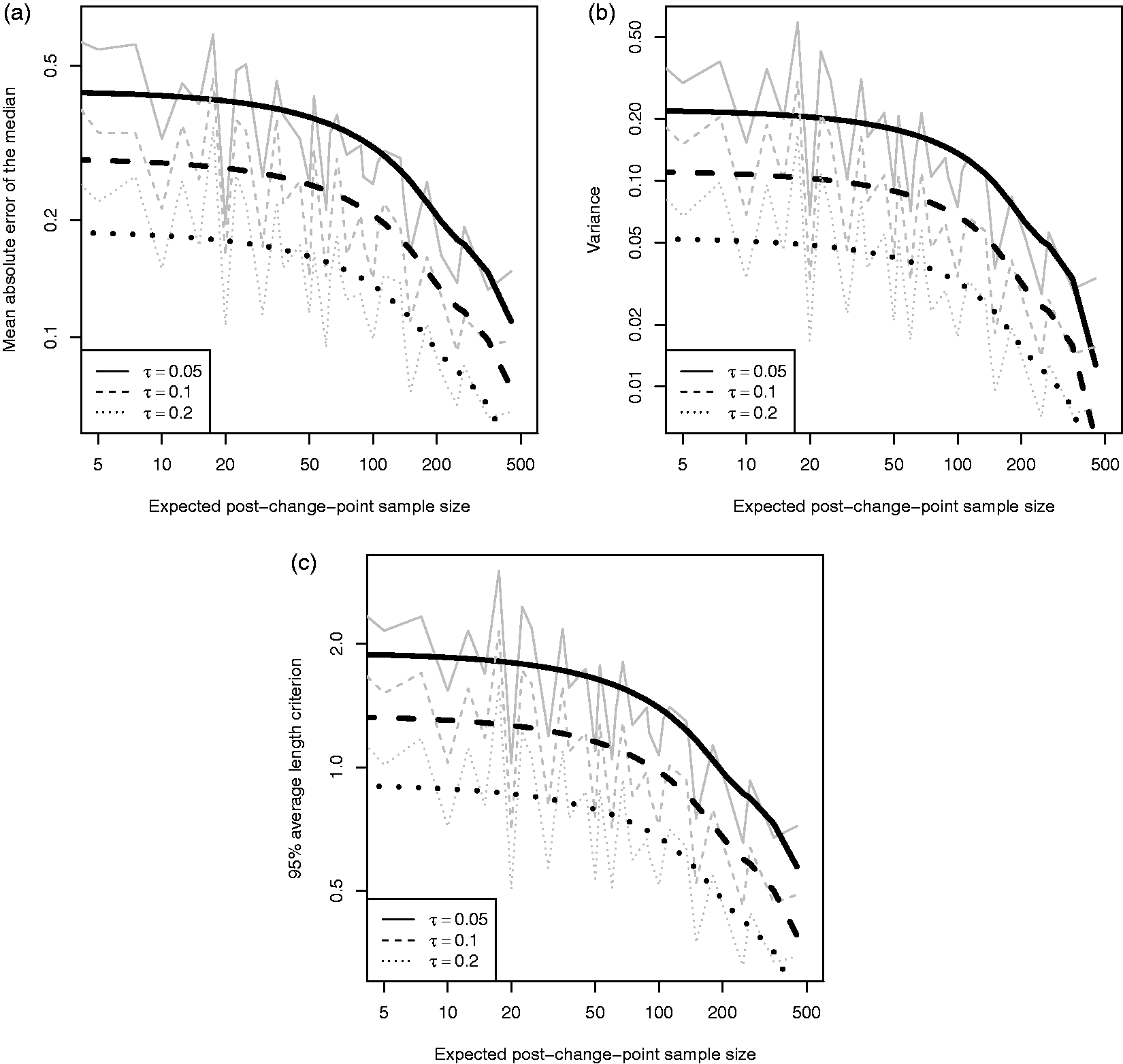
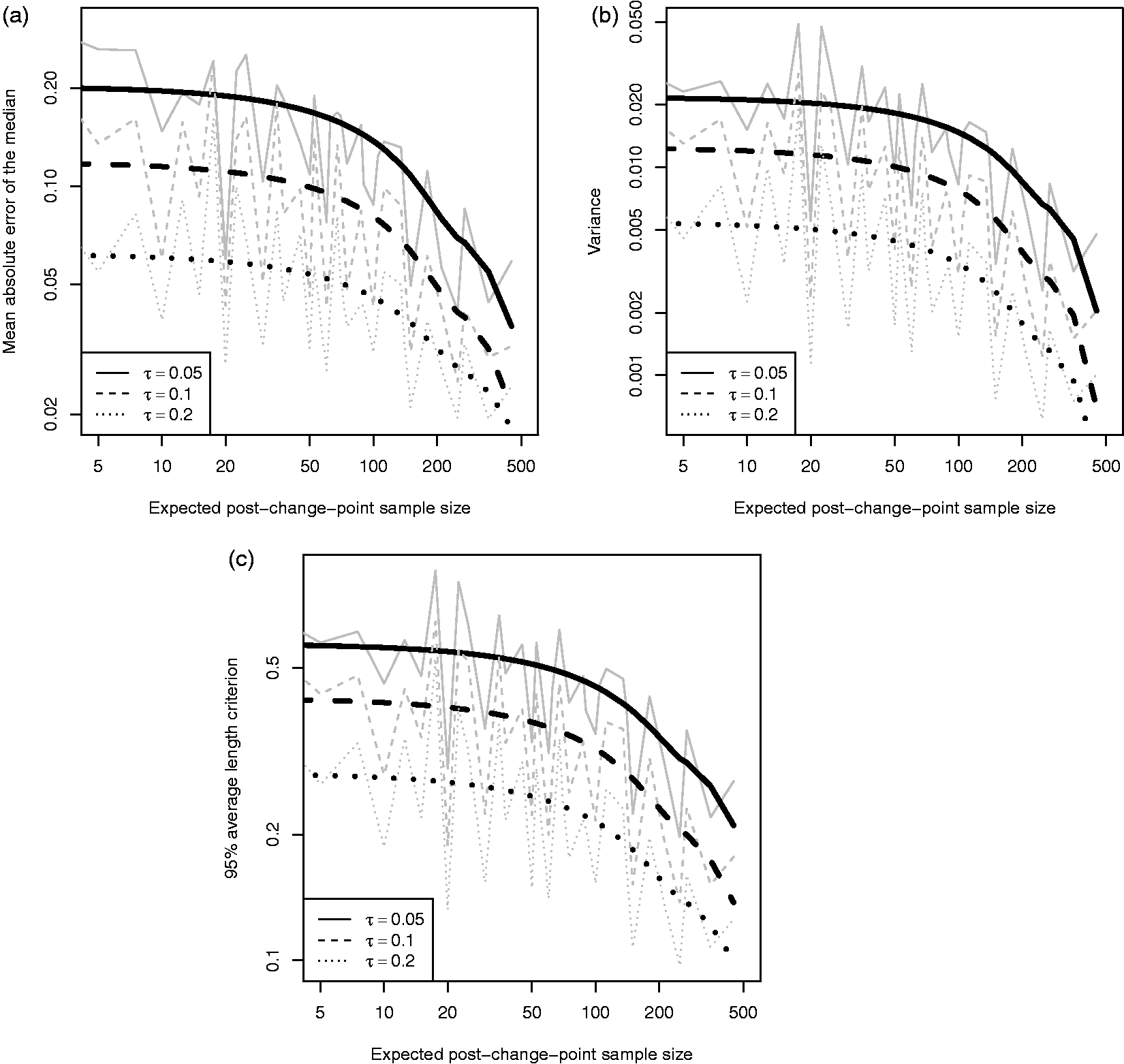
By definition the shape parameters are dependent, since we require continuity at the change-point. Beyond the continuity constraint, a deeper dependence is induced by the existence of a change-point. If the change-magnitude is zero or, almost equivalently, all individuals belong to the no change class, then the slope parameter will be informed by all observations. Conversely, if a change-point does exist, then the variation is explained by both the slope and change parameters. These two situations will result in different estimates for the slope, which in turn will affect the estimate for the intercept.
Figure 6(a) plots the bias in the posterior median for the intercept (α) parameter. We see that for small post-change-point sample sizes, there seems to be a plateau. Beyond a post-change-point sample size of 50, on the log-log scale, the bias seems to decrease linearly. Given drop-out is MAR, we would expect the bias in the intercept to be well behaved. Figure 6(b) and (c) is closely related, for a unimodal symmetric posterior there is a one-to-one relationship between the variance and ALC. As expected, the measures seem well behaved on the log–log scale for increasing post-change-point sample size.
Similarly, Figure 7 plots the same measures for the slope (β) parameter and the behaviour is comparable.
The change-magnitude (δ) parameter behaves very differently. In Figure 8, the bias is an order of magnitude greater than for the slope parameter despite being comparable, and the variance and ALC do not appear as well behaved.
The explanation of Figure 8 comes from the ability to detect the existence of a change-point. If there is insufficient evidence of a change-point then the posterior for the change-magnitude will be close to zero (in a classical sense or using spike-and-slab priors,
3.6 Error-precision
The error-precision (τ) parameter is particularly important to our discussion. Typically in classical sample size formulae, the user must specify the observation-error a priori as a fundamental aspect of determining the sample size. In that regard, we consider the error-precision as known. In an application, we would also wish to make inference on the error-precision.
Figure 9(a) to (c) plots the summary measures for the error-precision as for the shape parameters in Section 3.5. Against our intuition, the least precise scenario, Summary measures for the error-precision (τ) parameter over a range of post-change-point sample sizes: (a) mean absolute error of the posterior median, (b) mean posterior variance and (c) 95% ALC. Scenarios are grouped by the true observation-error (solid, dashed and dotted lines). Simulation summaries are grey lines and LOWESS curves are black.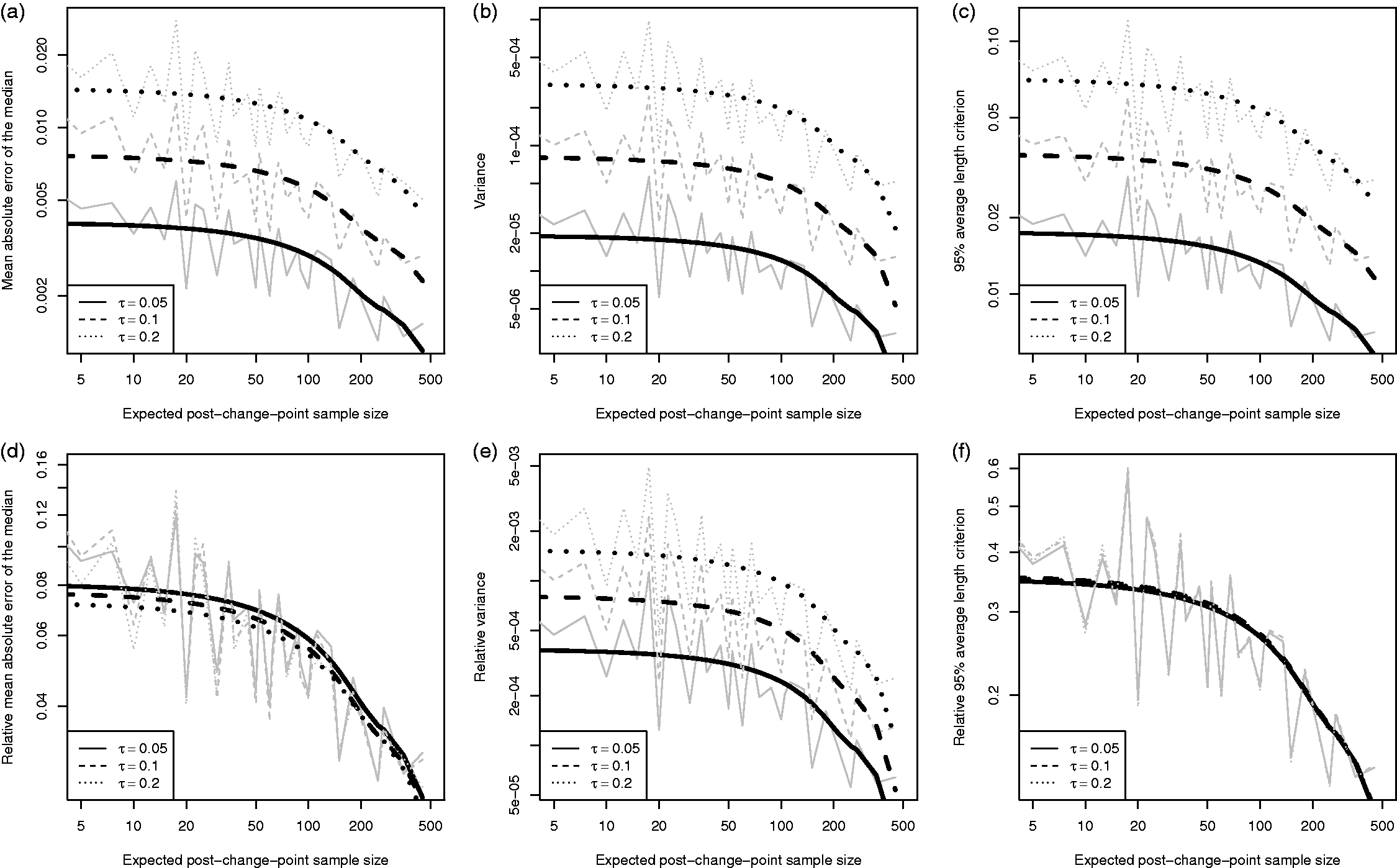
However, this comparison is unfair as the measures are not based on the same values across the three scenario groups; unlike the plots in Section 3.5, where the scenario groups were all comparing their measures to the same true value. To compensate, Figures 9(d) to (f) plots the bias, variance and ALC relative (by scaling) to the true error-precision.
Once scaled, ignoring the low post-change-point sample sizes due to the failure to detect a change-point, we see that there is no difference in the bias and ALC, both of which appear to decrease linearly on the log–log scale. This is as expected since all observation errors are independent, so we would expect fairly reliable inference about the error-precision.
4 Discussion
Using a simulation study, for a class of fixed effect change-point models with unlabelled individuals belonging to either a change or no change class, we have investigated the relationship between post-change-point sample size and classification-error – as well as the bias and variance of the posterior estimates of the fixed effects – in a Bayesian framework.
4.1 Insights into study design
The results relate to our motivating setting of modelling decline in cognition measured by the MMSE. Although exact numerical results would need adjusting under different parameters, the overall trends and conclusions are widely applicable.
Our first insight is to consider study design in terms of (expected) post-change-point sample size, a function of the drop-out probability (pd) and first wave sample size (n). We have shown important relationships that hold for a range of sample sizes and missingness scenarios by reducing these two factors to a single number.
The price we pay for using a simple univariate sample size metric is greater variability across comparable scenarios, where we define comparable scenarios to be n − pd pairs giving similar post-change-point sample sizes (
Study designers can consider the trade-off between the cost to decrease drop out (thus minimising incomplete follow-up) and the cost of initial recruitment to obtain a specified post-change-point sample size. Further, thinking in terms of post-change-point, sample size highlights the issue of biased attrition in cohort studies, 20 since only a sub-sample of initial recruits are represented post-change-point. Our drop-out model is appropriate for unbiased attrition processes and we leave the impact of alternative attrition models for future work.
Our main result combines change-point detection and classification-error. As expected, the error-precision defines the limiting AUROC for larger post-change-point sample sizes. That is, given the separation of the true underlying sub-groups relative to the error-precision, we would expect an upper limit on the classification accuracy, i.e. for very low error-precision the two sub-groups would overlap and be indistinguishable. The observation-error is a key aspect of required sample size, and the effect of larger precision (equivalently, smaller variance) can be trivially seen in Section 3. In our study, an error-precision of 0.05 (equivalently a standard deviation of 4.47) has a limiting AUROC of approximately 0.85. A more realistic error-precision of 0.1 (standard deviation 3.16) for the MMSE 29 has a limiting AUROC of approximately 0.9.
For study designers, the inherent limit on classification is a concern. Worse, the rate of increase to the limit is very slow. Thus, only minor improvements in AUROC are gained for substantial increases in post-change-point sample size.
Conversely, and unintuitively, for low post-change-sample sizes, there is not a significant increase in classification-error (equivalently a decrease in the AUROC). However, the stability in classification-error is an artefact of the half-normal prior on the change-magnitude. Since the parameter can never be zero, even a slight change-magnitude results in a difference in the likelihood between the two labels for an individual. Thus, individuals who are far above or below the true shape will be ‘correctly’ labelled. Despite these ‘correct’ labels, the labels themselves cannot be interpreted (and are essentially meaningless), since if the change-magnitude is zero then both sub-groups really experience no change.
Thus, when designing a study optimised for classification, we require a post-change-point sample size that gives interpretable labels, i.e. confirms the existence of a change-point, and then attains the desired classification-error. Hence, reliability of change-point detection is more important to setting sample size than the classification-error. From Figure 3 we see that, in our motivating example, a post-change-point sample size of 50 is the minimum at which the probability to detect a change-point increases across all three error-precisions.
4.2 Comparison to real applications
The novel aspect of our change-point model is to include unlabelled sub-groups, which has allowed us to gain insight into the issue of classification-error; many change-point models assume every individual experiences a change or pre-classify the individuals. Within our simulation study, we considered individuals to be equally likely to be in either group; this is the most optimistic setting to detect a difference with equally size groups. However, we did not include any covariates that could aid classification, which may reduce the sample size but would add further coefficients to estimate – a trade-off that requires further investigation.
The inclusion of unlabelled sub-groups allows us to consider links between our approach and methods to test for the existence of a change-point; specifically, if all individuals are classified in the no-change group, we have evidence that there might not be a change-point at all. Ji et al. 19 consider a hypothesis test for the existence of a change-point using MMSE scores of 47 individuals (a subset of a larger dataset), where some exhibit so-called accelerated decline (i.e. a change-point) under visual inspection. The individuals’ observation times are zero aligned at diagnosis of Alzheimer’s Disease, so in our framework there is a post-change-point sample size of 47. According to our design criteria, this sample size has only moderate power to detect a change-point. Further, our approach would accommodate a mixture of change and no-change individuals, whereas the hypothesis test of Ji et al. 19 only considers everyone to have a change-point or not.
Although we have used a simplified setting, this class of fixed effect change-point models have been applied in practice.18,28 Hall et al. 18 study the Buschke selective reminding test and, in our notation, estimate an intercept (α) of 46.06, slope (β) of –0.61, a change-magnitude (δ) of 1.49, and an approximate observation-error (τ) of 0.4, which reasonably match our simulation study values derived from the MMSE. With a post-change-point sample size of 365, according to our design criteria, their study was appropriately powered to detect a change-point. However, as part of their approach Hall et al. 18 also estimate the time of the change-point. In terms of our sample size results, the effect of also estimating the change-point would be to under-estimate the power.
4.3 Summary
In our simulation setting, the sub-group label is inferred solely on the observed scores and times. In real application, focusing on classification other covariates, such as gender, would likely be available. Previous work has considered adding covariates in equation (1) under a Bayesian
54
or frequentist
55
framework. The effect of adding covariates into the change probability model – which was held constant in this paper,
The expected post-change-point sample size metric focuses designers thinking on the key aspect of study design for change-point processes, while still being a relatively interpretable univariate summary of the required sample size. It may also be possible to extend this univariate metric to more complex attrition models, beyond the single drop-out time model.
We have shown that even for studies of modest size (n = 500, with 50 past the expected change-point) in the fixed effect analysis a change-point of size two can be detected and modelled. Further work is needed to extend these results to more complicated change-point models and to assess the relationship of sample size with the change-magnitude and the observation model. We have developed initial guidance for study designers on the relationship between accuracy of classification and sample size.
Footnotes
Acknowledgements
The authors would like to thank all the reviewers, in particular Jack McArdle and Timothy Hayes, for their constructive and thoughtful comments which greatly improved the clarity and presentation of the paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Medical Research Council (Unit Programme number U105292687).