This paper aims to achieve two goals. First, the tracking problem with a ramp-type setpoint and disturbance is addressed, where classical methods provide steady-state error. Second, the available fractional-order controller designs in the literature are based on complex calculations. This paper presents a design scheme that employs a target loop-based controller, allowing users to compute tunable parameters without approximation or assumption. The control structure is capable of handling both the step and ramp signals. The main advantage of the proposed design is that it can be analytically tuned using the maximum sensitivity and phase-margin specifications of choice. Explicit relationships are established for the new fractional-order ramp controller (FoRC) parameters to facilitate tuning. The numerical investigations revealed improved servo and regulatory responses compared to recently published strategies. The design controller ensures stability and zero steady-state error as the ramp input increases. Furthermore, hardware verification demonstrates the scheme’s superior performance on a two-tank level loop, even with the influence of disturbances and modeling variations.
Many processes can be better described by fractional-order (real-order) differential equations due to their characteristics. There has been a lot of interest from the scientific community in the increasing use of the fractional theory. Systems whose dynamics do not adhere to integer orders can be represented mathematically by a fractional-order system (FoS). One primary task in control theory is designing a controller for a FoS. The following reference signals with accuracy are the primary goal of tracking control. Despite all the efforts and achievements in this field, theoretical issues and practical concerns still need to be addressed. For example, the classical PID family does not promise a zero tracking error against ramp setpoints. The robotics and control industry frequently uses various reference signals, including ramp, impulse, parabolic, and pulse.
The PID controller is the most used in industrial operations because of its excellent performance and straightforward layout.1–3 The fractional-order PID (FOPID) provides better flexibility and superior control performance due to a more parameterizable design.4–7 With an integer order system (IoS), one can easily incorporate gain and phase margin specifications and notable explicit methods available in the literature. However, the complexity is greater with a FoS and is difficult to solve analytically. Design is more complicated with nonlinear expressions. Studies show that designing a FOPID for non-integer plants is harder than integer orders. Using the internal model control (IMC), fractional filter with closed loop condition8 and frequency domain specifications,9 a fractional-order controller (FoC) was developed for FoS. In Reference,10 a digital FOPID controller is designed to regulate the speed of a buck converter-powered permanent magnet DC motor. In Reference,11 an IMC-based fractional order tilt-integral-derivative (FOTID) control law is presented to handle the processes characterized by time delays across various applications. In Reference,12 a robust FoC based on frequency domain specifications is proposed for a system with first-order plus integral dynamics. In Reference,13 a model-free fractional order controller is developed for stable processes based on a modified relay technique. For integrating processes an optimization-based fractional order IMC-TDD controller is presented in Reference.14 In Reference,15 a loop shaping-based multi-term FOPID was discussed. Based on robustness specification, FOPI was tuned for real-order time delay plant.16 With desired gain and phase margin specifications, an IMC-based FoC is described in Reference.17 An imperialist competitive optimization for tilt controller was developed in Reference.18 Based on the complex root boundary method, a fractional-order integral derivative () controller was presented in Reference19 for integrating plants. The gain and phase margin method for a fractional tilt-derivative controller was recently seen in Reference.20 Though these approaches offer good results, implications need more parameters for tuning, iterative calculations, or certain assumptions. Like user-friendly PID design, the new FoC structure also requires explicit tuning formulas to ease tuning.
Furthermore, as mentioned earlier, the solutions typically handled step-only signals and rejected step-type disturbances, whereas ramp-type tracking or ramp disturbances may fail the control. Nowadays, there is a growing need to tackle ramp setpoints; an example of this behavior may be a system made of a direct current motor with an acceleration ramp as its reference tracking.21,22 Also, ramp tracking is beneficial in advanced systems such as satellite and missile launching. Limited research works have been dedicated to ramp tracking so far. To handle an increasing signal (ramp), a control law based on a one-and-a-half integrator was proposed for non-minimum phase systems.23 An augmented model with a double integrator was introduced in Reference.22 To follow ramp input, a state feedback control law was presented in Reference.21 Some discussion was seen for ramp tracking using fractional integrator to the loop transfer function.24 In Reference25 a PID controller is suggested based on criteria involving relative delay margin and maximum sensitivity. To follow step and ramp inputs, a dual degree of freedom control structure with a differential operator is proposed in Reference.26 A FOTID controller employing IMC is introduced in Reference27 specifically for unstable time-delay processes. The authors proposed a PI controller in Reference,28 whereas in Reference,29 an IMC-FOPI controller is presented for the same plant. However, neither of these designs is capable of handling ramp signals. The indirect fractional IMC-FOPID (IF-IMC-FOPID) is suggested by Reference,30 but it can only handle step setpoints. For integrating processes, the PIDI controller is presented in Reference.31 However, its design is optimization-based, making it not user-friendly. It is fascinating to create a direct fractional-order ramp controller (FoRC) that is able to track a velocity ramp correctly, including compensating input disturbances. Considering the above points, the objectives of this paper can be summarized as follows.
Given some design specifications, develop explicit tuning formulas for FoRC so that it can handle a setpoint ramp and reject ramp disturbances.
While most FoCs have more tunable parameters with complexity, our method involves only two tuning parameters.
The explicit formulas in terms of plant parameters are established to simplify tuning steps.
The suggested control scheme can provide a good trade-off between performance and robustness. It is capable of offering stability even with high perturbations.
A detailed investigation with studied examples from the literature is presented with ramp load disturbances and also practically verified the novel control design.
The rest of this paper is arranged as follows: Section “Fractional-Order Plant Model” presents a fractional-order plant model for controller design. The proposed control scheme is introduced with target loop parameters in Section “Design Target Loop for FoRC.” Section “Proposed Controller Design” develops the FoRC structure according to the plant model. A numerical study with a comparative investigation is included in Section “Case Studies.” The extension of the proposed approach for a broad class of plants is elaborated in Section “Extension of the Proposed FoRC Method to a Broad Class of Systems.” The practical test on the liquid-level system is validated in Section “Experimental Study.” Finally, the conclusion is discussed with some recommendations.
Fractional-order plant model
The proposed scheme is developed considering the non-integer (fractional) order plant with a transfer function.
where , , and are fractional-order. is fractional-second-order time-delay (FSOTD) system with . and are static gain and time delay, respectively. To note, becomes a fractional first-order time delay (FFOTD) model. Although the approach can regulate a controller for a general class of stable fractional systems, the validation part examines well-studied plant models from various classes.
Design target loop for FoRC
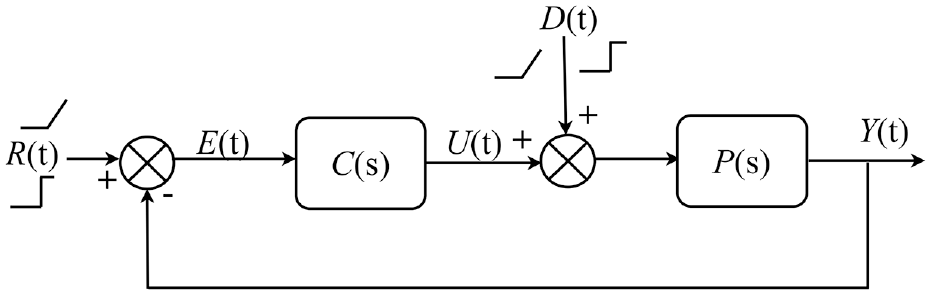
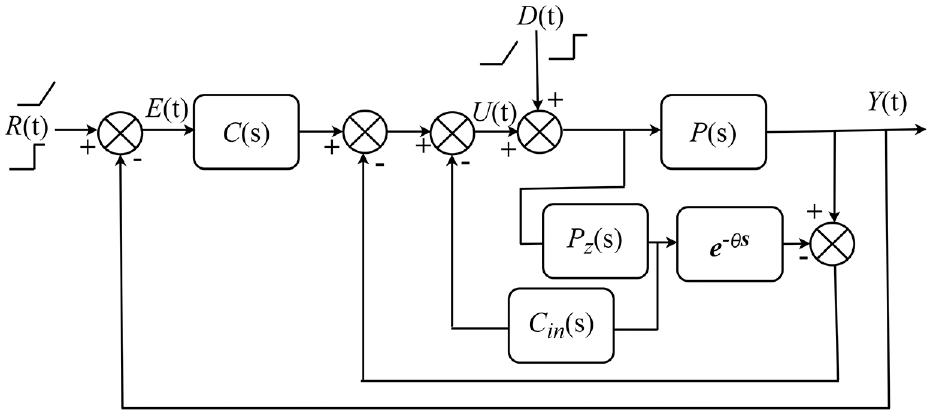
The challenge of efficiently handling higher-order references and disturbances persists despite the recent literature on controller design for fractional-order processes. Figure 1 depicts a typical closed-loop control architecture with controlling the plant . Also, variables , , , , and represent the reference, error, disturbance, control signal and output, respectively. The open loop transfer function (LTF) for the control structure in Figure 1 is represented as .
Closed-loop control structure.
A technique known as target loop-based design is one in which an appropriate desired open loop is chosen first, and then a controller needs to be created to accomplish that. Conventional loop-shaping theories have the potential to affect the concept of target LTF. These theories stipulate that the target loop must include all of the non-invertible components of the process model. In a design of this kind, selecting the target loop is of the utmost importance. The desired loop for a delayed open-loop stable system can be chosen as Bode’s ideal transfer function, .1 Here represents the closed-loop bandwidth, and is the slope of the magnitude curve. Although this target loop can track step inputs and reject disturbances, it would fail to handle the ramp-type signals. We need more than one free integrator in the open-loop design to handle ramp-type servo tracking and disturbance rejection. Let us take LTF in general as below.
with and . To achieve the tracking of ramp setpoints, it is necessary for to have more than one free integrator. This requirement becomes apparent when analyzing the over extended time intervals. Assuming the stability of the closed-loop system, we can employ the final value theorem of the Laplace transform for analysis.
with the closed-loop . If the ramp signal , we get
The expression (5) becomes zero only when , which poses a challenge for integer-order controllers as each integrator introduces a phase loss. To stabilize the closed-loop system, it is essential to compensate for this phase loss by introducing minimum phase zeros to the controller. Considering the above observation, some modifications in the target loop selection are proposed below.
The controller should have two integrators with minimum phase zero.
The target loop can be parametrized as
In , is the trade-off between disturbance attenuation and step response overshoot and is the time delay of the original plant. The choice of can be made as in the desired loop (6), with proper selection of tuning parameter .
This target loop is required to select two parameters instead widely studied function for a given plant model.
Remark 1. It is to note that literature31 suggested to choose between . However, there is a lack of justification or specific relation available.
Attempt to design the target loop with the proper selection procedure for and so that the closed-loop system achieves the desired performance and robustness. The following subsection provides the selection steps for both unknown parameters.
Explicit design for target loop parameters
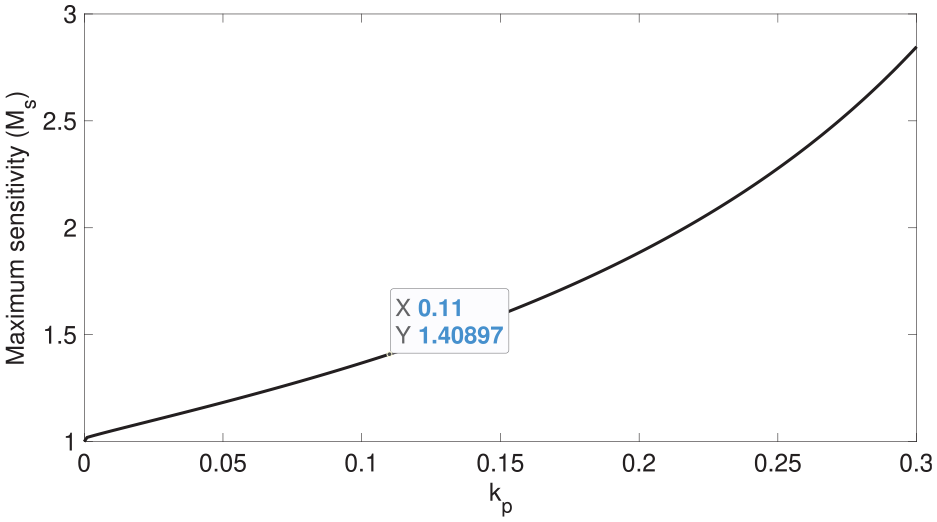
Target-loop parameters and have a close association with maximum sensitivity and phase margin . To achieve robust stability, of should be in the range of and fall within the stability range .31,32 A higher degree of robustness is indicated by a higher value of and a lower number of in the range. In contrast, a faster response with reduced robustness is suggested by a higher value of and a lower value of . This work provides an analytical solution for unknown target loop values employing a graphical technique.
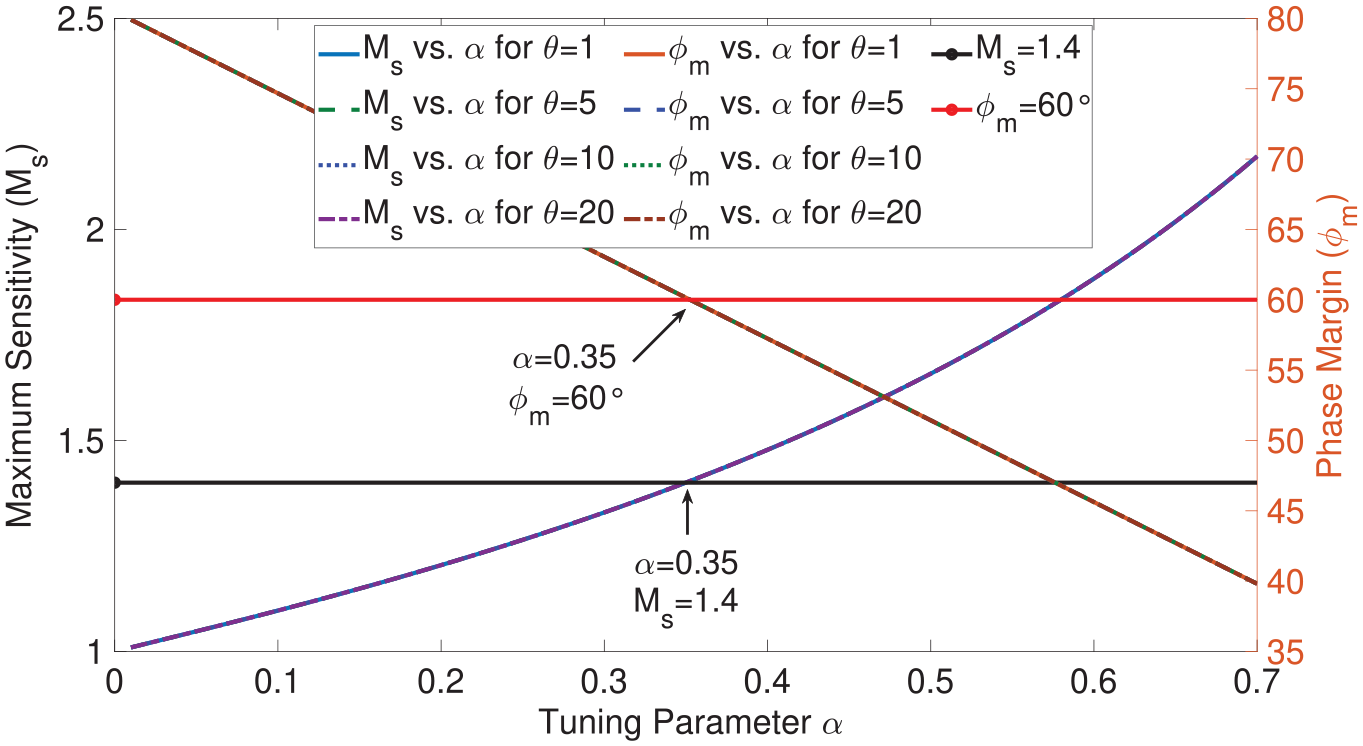
In order to strike a balance between robustness and performance in the closed-loop response, this study considers the values and . Due to the presence of two integrators in the designed LTF, the overshoot is possible. Thus, design criteria are selected to increase the robustness of the closed-loop system. Let us now assume (i.e. ). The relation has been plotted as versus and versus for different values of . Interestingly, both the criteria for and are achievable at and . As seen in Figure 2.
Relation of with and for possible values of .
Remark 2. Design parameters and will always satisfy and and confirm the independence of . When we plot the values of and with and in Figure 3 for varies , it has been found that will always satisfy and . Therefore, an explicit expression can be written as,
Selected value of from and when .
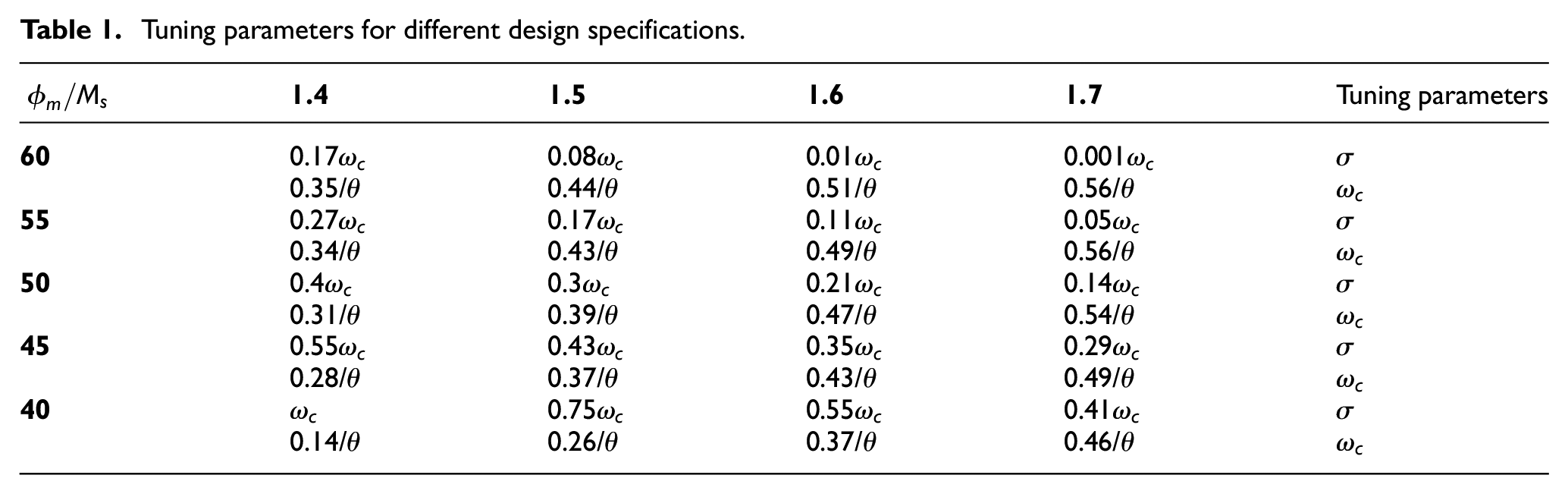
Initially, the time delay is set to 1, making equal to . Graphs are then plotted of versus and versus for various values of , as shown in Figure 2. From Figure 2, it can be observed that both criteria, and , are achieved at and . Subsequently, graphs are plotted of , , and with for different values of time delay, such as and , as shown in Figure 3. From Figure 3, it can be observed that both design parameters, and , are consistently met at and , regardless of the value of .
Similarly, a comprehensive compilation of explicit formulas and potential design specifications is presented in Table 1 to calculate the unknown parameters. Using these formulas, designers can determine the precise controller configurations that correspond to their designed specifications.
Tuning parameters for different design specifications.
1.4
1.5
1.6
1.7
Tuning parameters
60
0.17
0.08
0.01
0.001
0.35/
0.44/
0.51/
0.56/
55
0.27
0.17
0.11
0.05
0.34/
0.43/
0.49/
0.56/
50
0.4
0.3
0.21
0.14
0.31/
0.39/
0.47/
0.54/
45
0.55
0.43
0.35
0.29
0.28/
0.37/
0.43/
0.49/
40
0.75
0.55
0.41
0.14/
0.26/
0.37/
0.46/
Proposed controller design
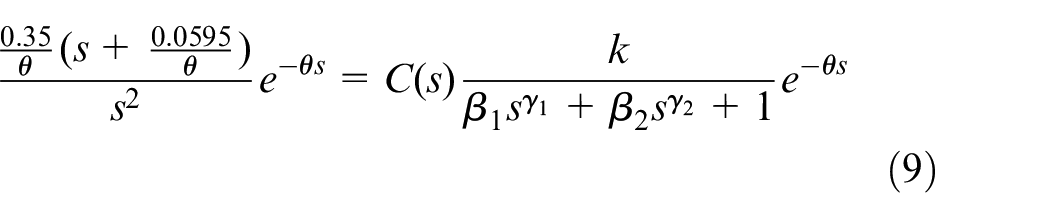
The explicit tuning expressions (7) and (8) can simplify the desired target loop function. Using the plant model (1) and target loop (6), once can write
After rearranging, main FoRC can be developed where,
and
It is observed that is a simple PI and is a FoC. The controller gains can be calculated directly from the plant model’s parameters. Interestingly, the generalized controller exhibits various forms based on the model. For the FFOTD model and becomes,
To note that when , is defined as
Let us take FSOTD model (1) and as per possible values of and , one can see the FoC as following. For , (11) can be written as:
The same controller when becomes
On other hand, integer controller remains unchanged regardless of the plant type or fractional-orders and .
Remark 3. Analyzing the robust stability of the closed-loop system or its family entails assessing the robust stability of its corresponding closed-loop characteristic polynomial(s). The assumed form of the continuous-time fractional-order uncertain polynomial is:
where denotes the vector representing uncertainty, stand for real numbers and for represent coefficient functions.
Then the family of polynomials is defined as:
where denotes the set that bounds the uncertainty. The family of polynomials (17) is robustly stable if and only if is stable for all .
The value set for the family of polynomials (16) at the frequency is defined as33,34
The zero exclusion condition for ensuring the (Hurwitz) stability of the family of continuous-time polynomials (17) can be formulated according to.33,34 Assume the polynomials in the family have an invariant degree, the uncertainty bounding set is pathwise connected, the coefficient functions for and there is at least one stable member . Then, the family is robustly stable if and only if the origin of the complex plane (zero point) is excluded from the set of values for all frequencies . In other words, is robustly stable if and only if
Remark 4. Stability of a fractional-order system can be determine by Matignon’s stability Theorem. Let us consider a fractional-order closed loop transfer function . This system may be transformed from -plane to -plane. Now is considered stable if and only if the following condition is satisfied35–37:
where .
The stability of a fractional-order system can also be analyzed by examining its characteristic equation in the following form:
where and represents the least common multiple of . For every value of , the roots of (22) is . Thus, the fractional-order system is stable if the following conditions are met:
Case studies
Proton exchange membrane fuel cell
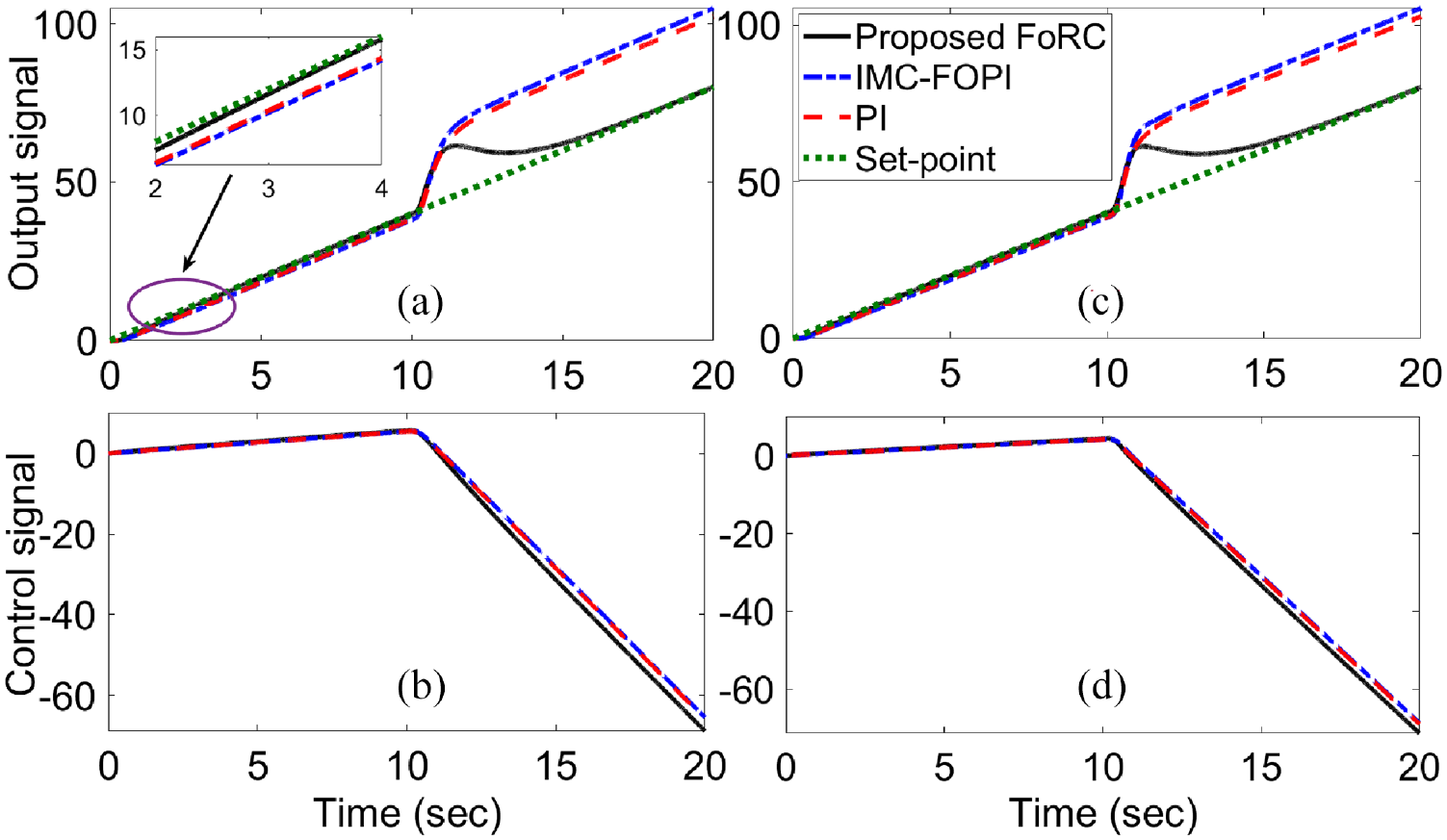
Let us consider a proton exchange membrane fuel cell system dominant with lag.28 It is represented by . The authors in Reference28 suggested the PI controller , while for the same plant, in Reference29 the IMC-FOPI controller was .
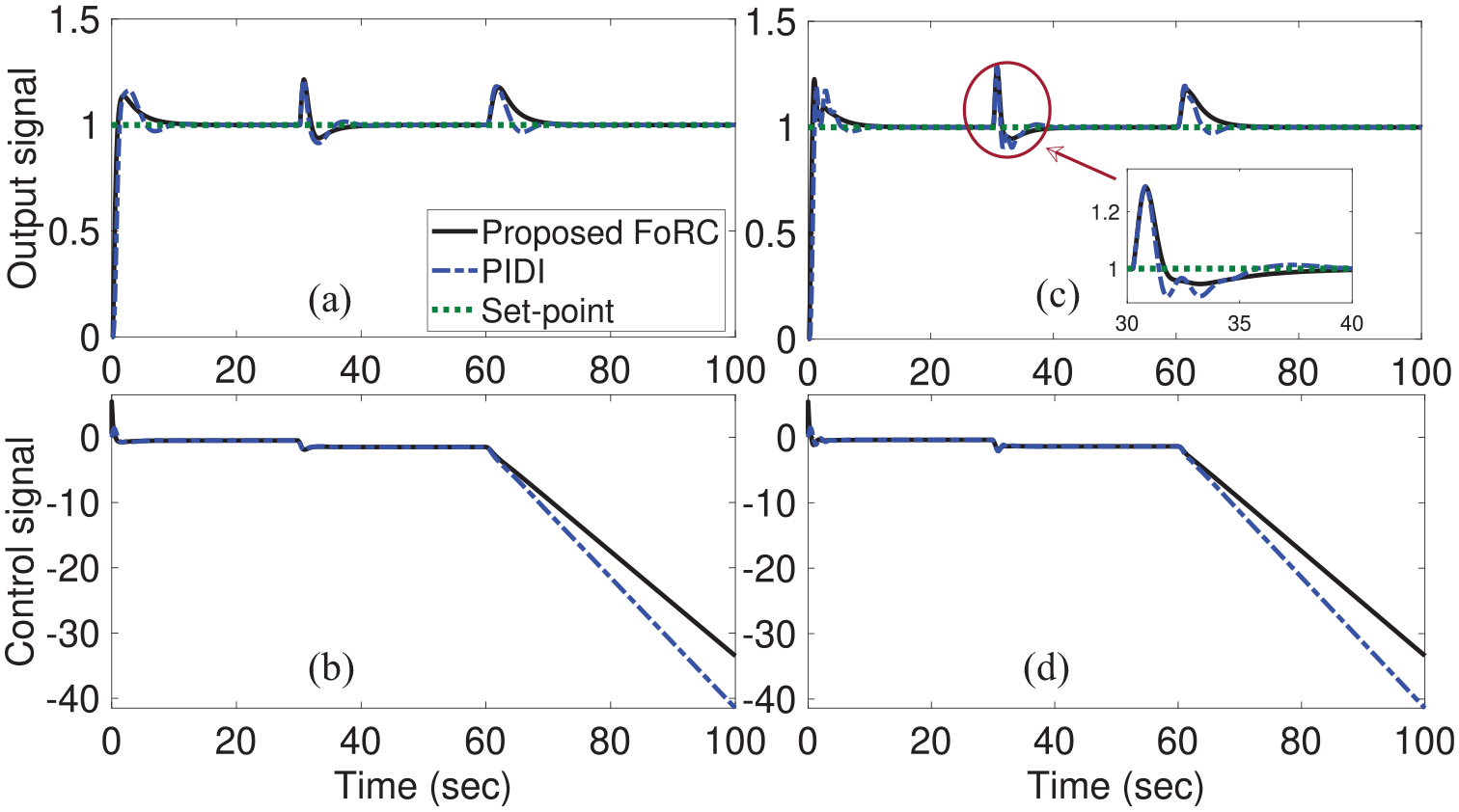
Now following the explicit design from Section “Proposed Controller Design,” the expressions provided in (10) and (12) are replaced by . All controllers are verified for ramp set-point input. The output of the system is shown in Figure 4(a) and the corresponding control signals in Figure 4(b). The simulation was carried out with four ramp inputs with slopes of eight at 10 s. To verify the robustness with uncertainty in model parameters, we assume +30% changes in both and simultaneously. Figure 4(c) shows the outcomes and corresponding control signals are plotted in Figure 4(d). One can see that the proposed fractional ramp controller can track the ramp signal and also reject load disturbance of type ramp effectively. The designs28,29 can not handle ramp signals.
Ramp tracking : (a) Output (b) Control signal (c) Perturbed output (d) Perturbed control signal.
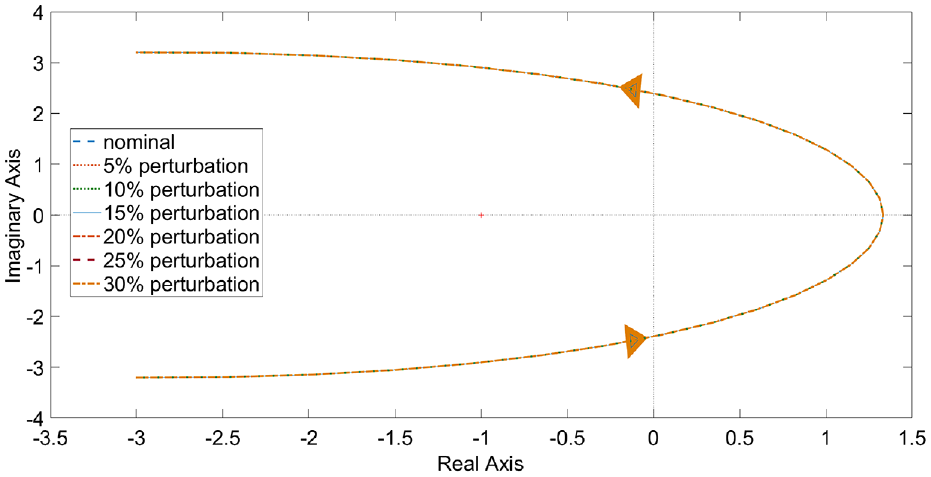
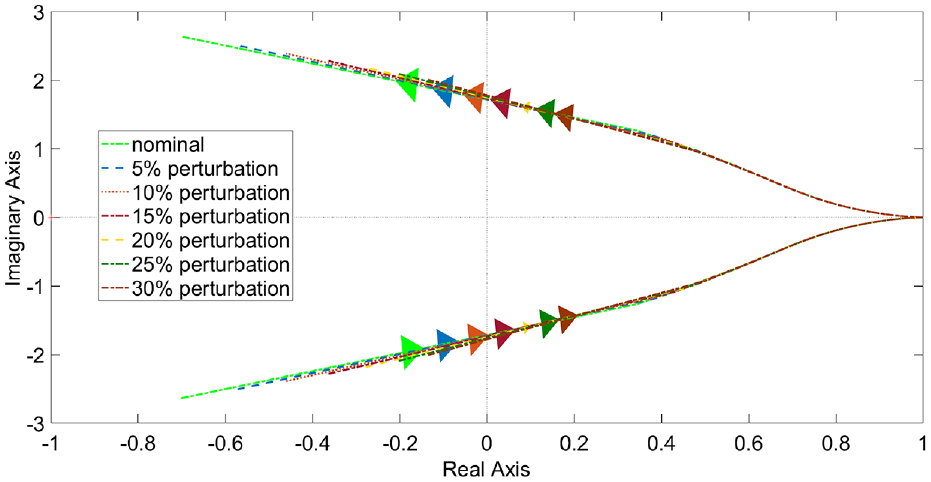
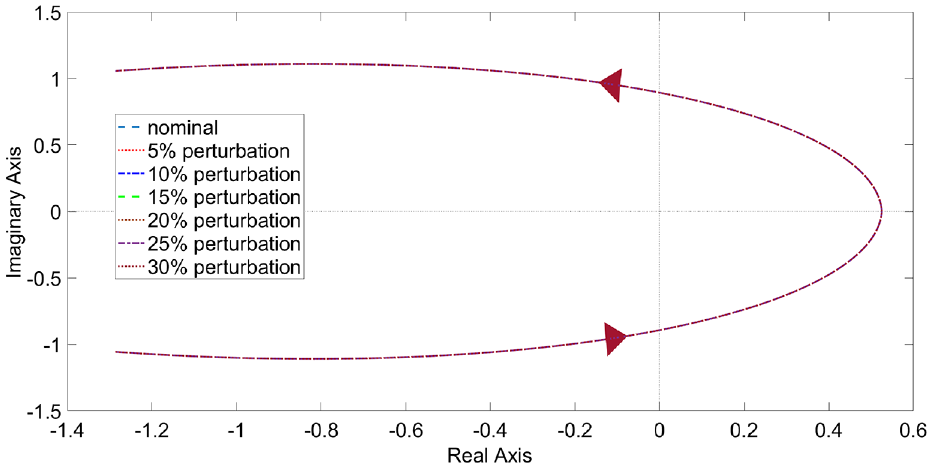
Additionally, to check robustness with an uncertainty bounding set ranging from 0% to 30% variations in both and , the family of closed-loop characteristic polynomials is defined as:
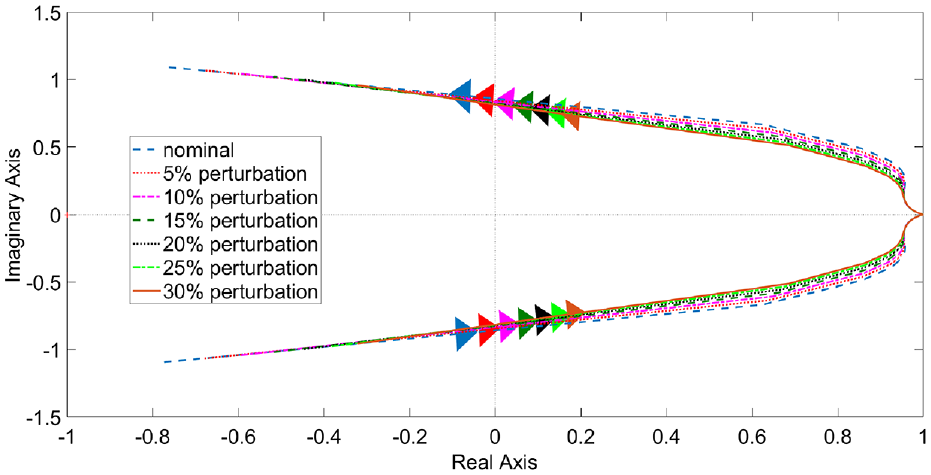
The value sets of polynomials (25) are plotted in Figure 5 for the frequency range from 0 to 1.5 with step 0.1. The family of (25) is identified as robustly stable, meeting the zero exclusion condition as discussed in Remark 3.
Value sets of characteristic polynomials for .
After transformation in the -plane, the roots of characteristic polynomial in (25) are obtained as , and with these roots, the outcome of (23) is . Hence, it shows that the system is stable.
Bio-reactor
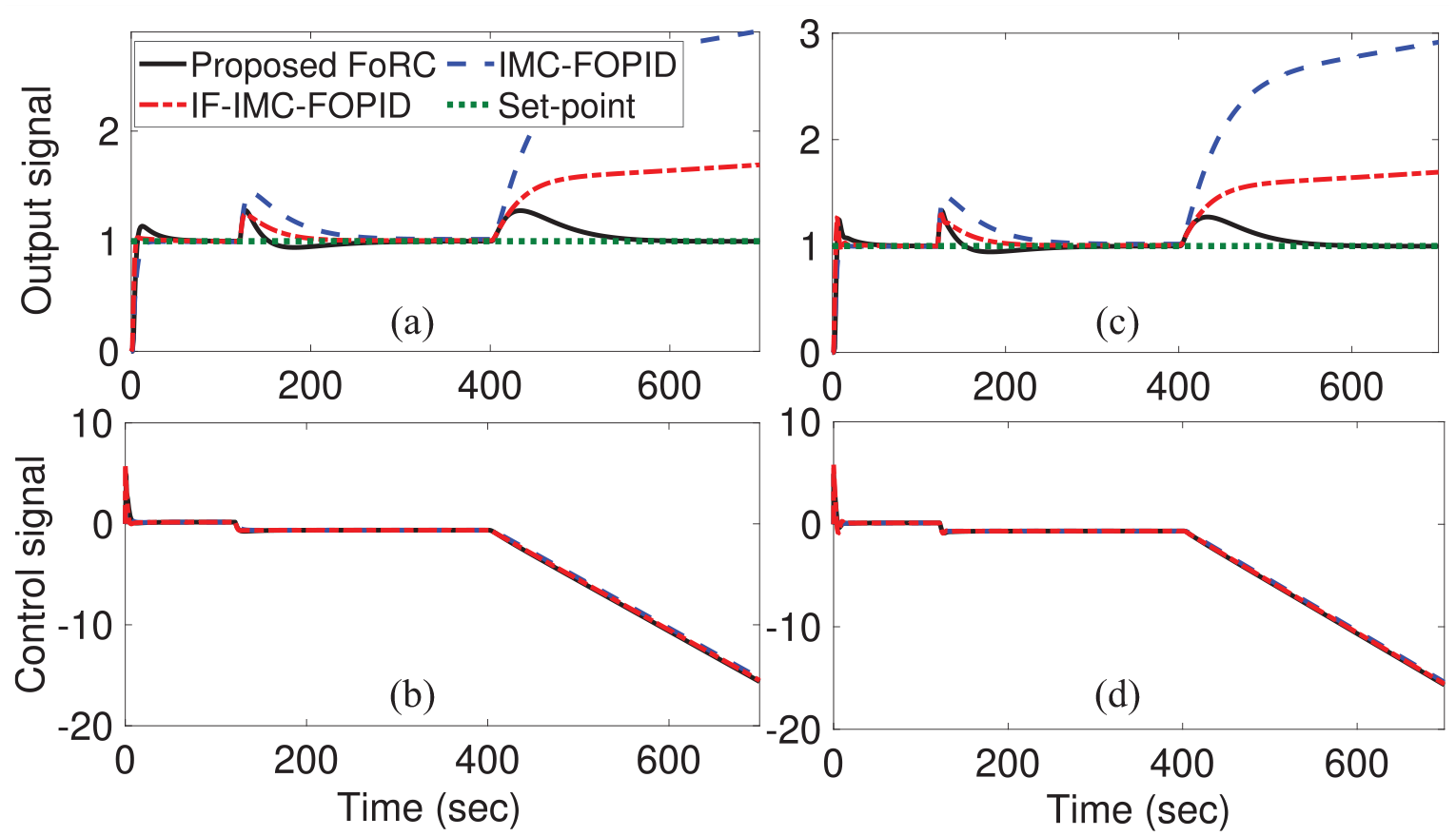
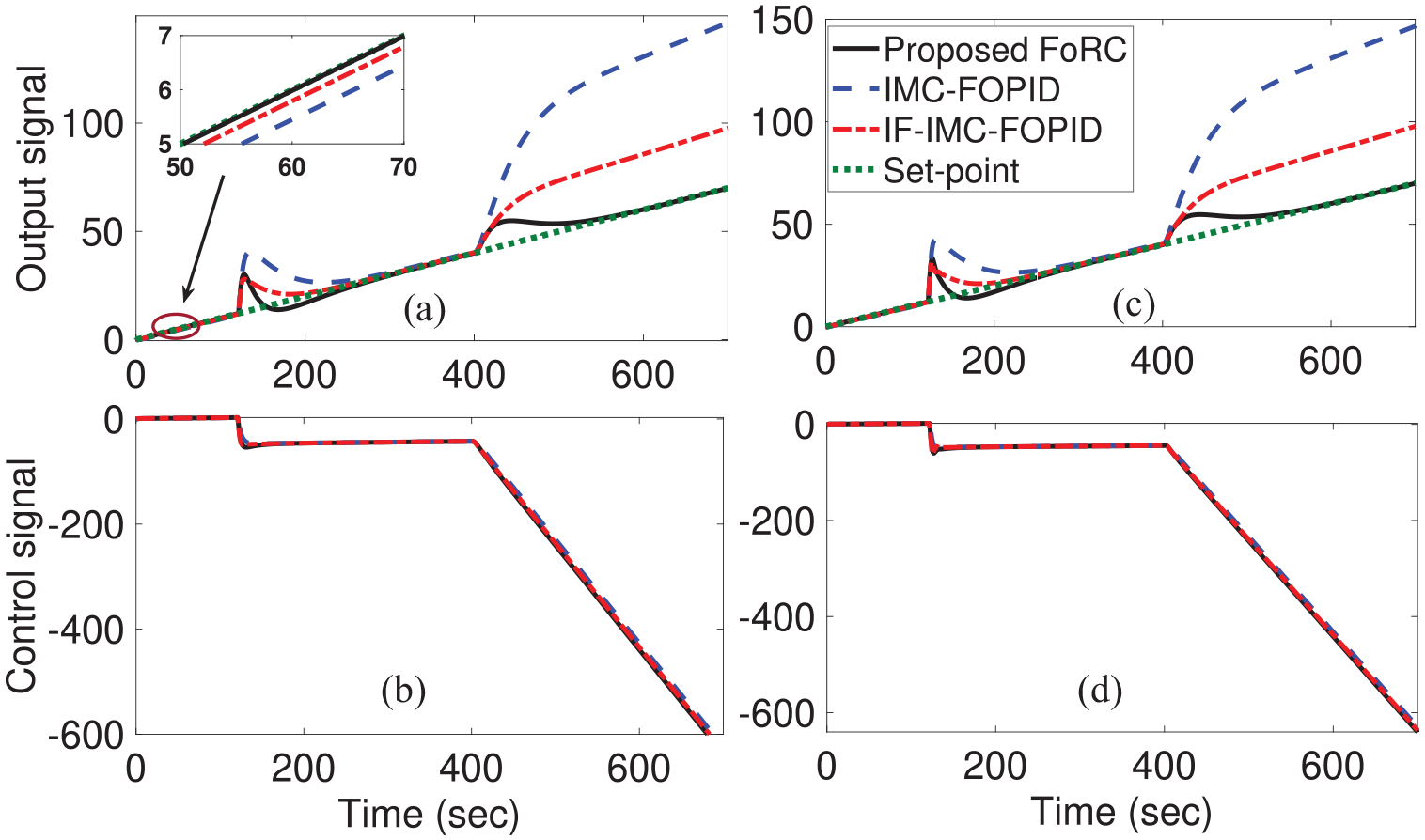
Let us consider a bioreactor model from29,30 as . Indirect fractional IMC-FOPID (IF-IMC-FOPID) was suggested30 as
. For the same plant, the higher-order IMC-FOPID structure by29 was . Following the proposed FoRC in Section 4, the parameters were calculated directly using (10) and (14). Our method obtains the FoRC as .
The outputs are compared with29,30 for the input type step and ramp signals. The respective plots are seen from Figures 6(a) and 7(a) and the corresponding control signals are also given in Figures 6(b) and 7(b), respectively. For Figure 6(a), simulation was performed with unit step input at sec, step disturbance of magnitude at sec and ramp disturbance with slope 0.05 at 400 s.
Step tracking : (a) Output (b) Control signal (c) Perturbed output (d) Perturbed control signal.
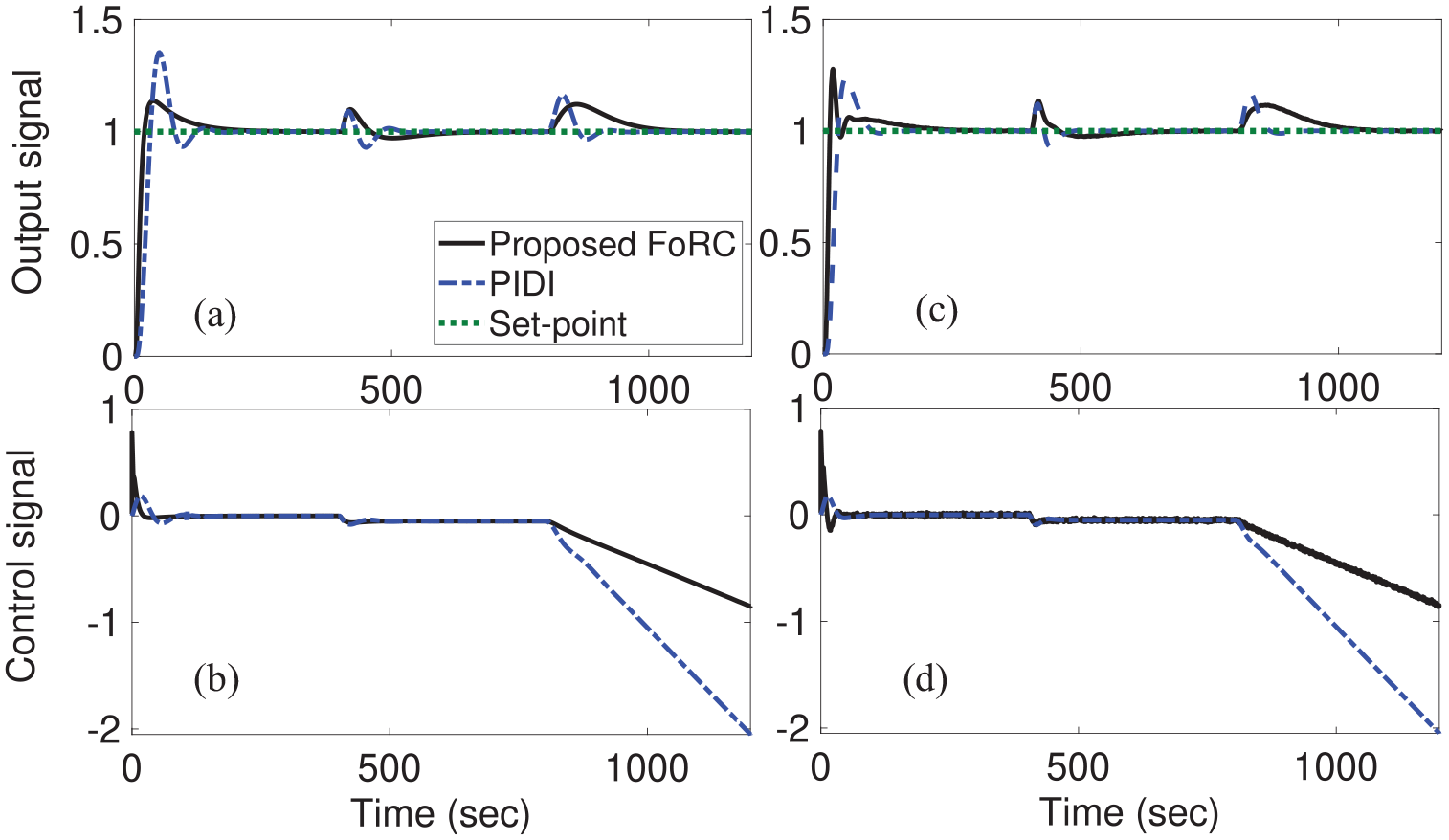
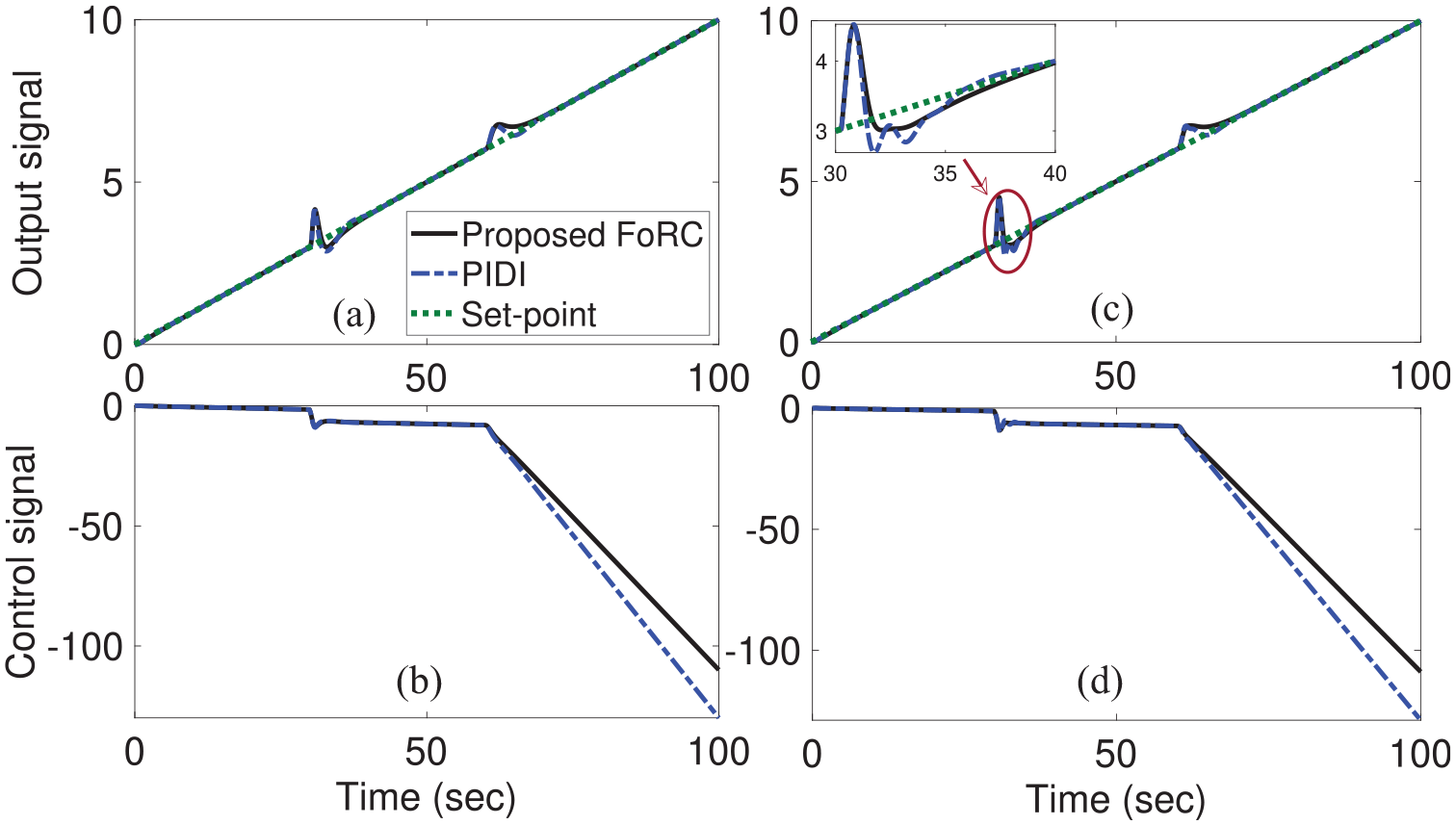
Ramp tracking : (a) Output (b) Control signal (c) Perturbed output (d) Perturbed control signal.
The output indicated better results for the new FoRC. More importantly, Figure 7(a) shows the ramp tracking, having 0.1 slopped at sec. Also, assuming a step disturbance of magnitude ±50 at s and a ramp disturbance with slope two at 400 s. Again, the proposed method outperformed the others. Further, to check the effectiveness of uncertainties, a study conducted with +30% changes in both process gain and delay simultaneously. The results for step and ramp signals are plotted in Figures 6(c) and 7(c). Note that the designs from References29,30 can only handle step setpoints. These results show that the proposed FoRC can effectively track and reject step and ramp signals together.
In addition, the robustness is checked with an uncertainty bounding set ranging from 0% to 30% variations in both and , the family of closed-loop characteristic polynomials is defined as , and the value sets of polynomials are plotted in Figure 8. The family of polynomials is identified as robustly stable, meeting the zero exclusion condition as outlined in Remark 3.
Value sets of characteristic polynomials for .
After transformation in the -plane, the roots of a characteristic polynomial for this case study are obtained as , and with these roots, the outcome of (23) is . Hence, it shows that the system is stable.
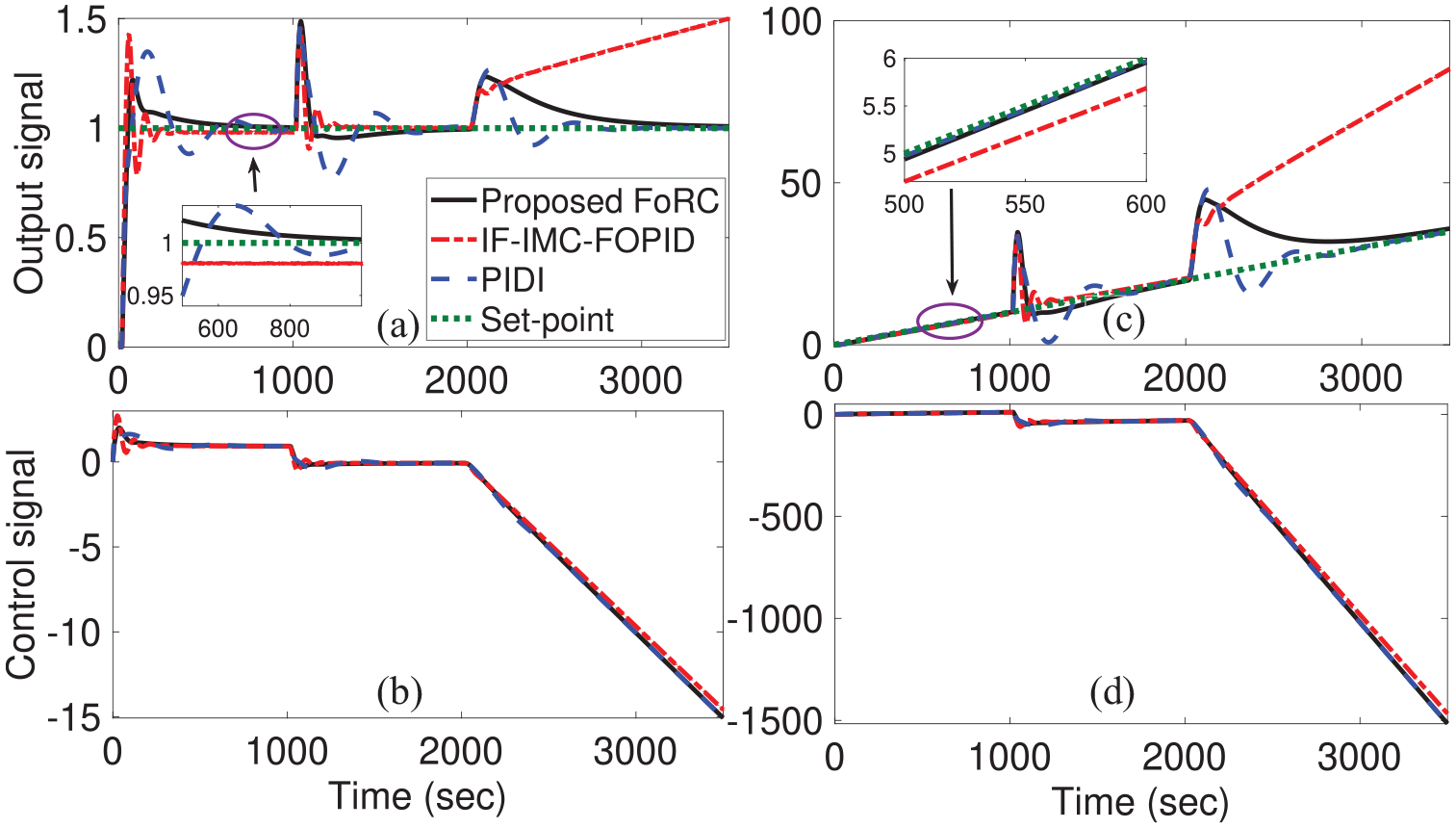
Conical water tank system
Let us consider a large deadtime conical tank system studied in Reference.30 The plant model is given as .
The IF-IMC-FOPID in Reference30 was . Now following the design presented in Reference,31 the PIDI controller for the same plant was calculated as . Now using (10) and (15), we have obtained .
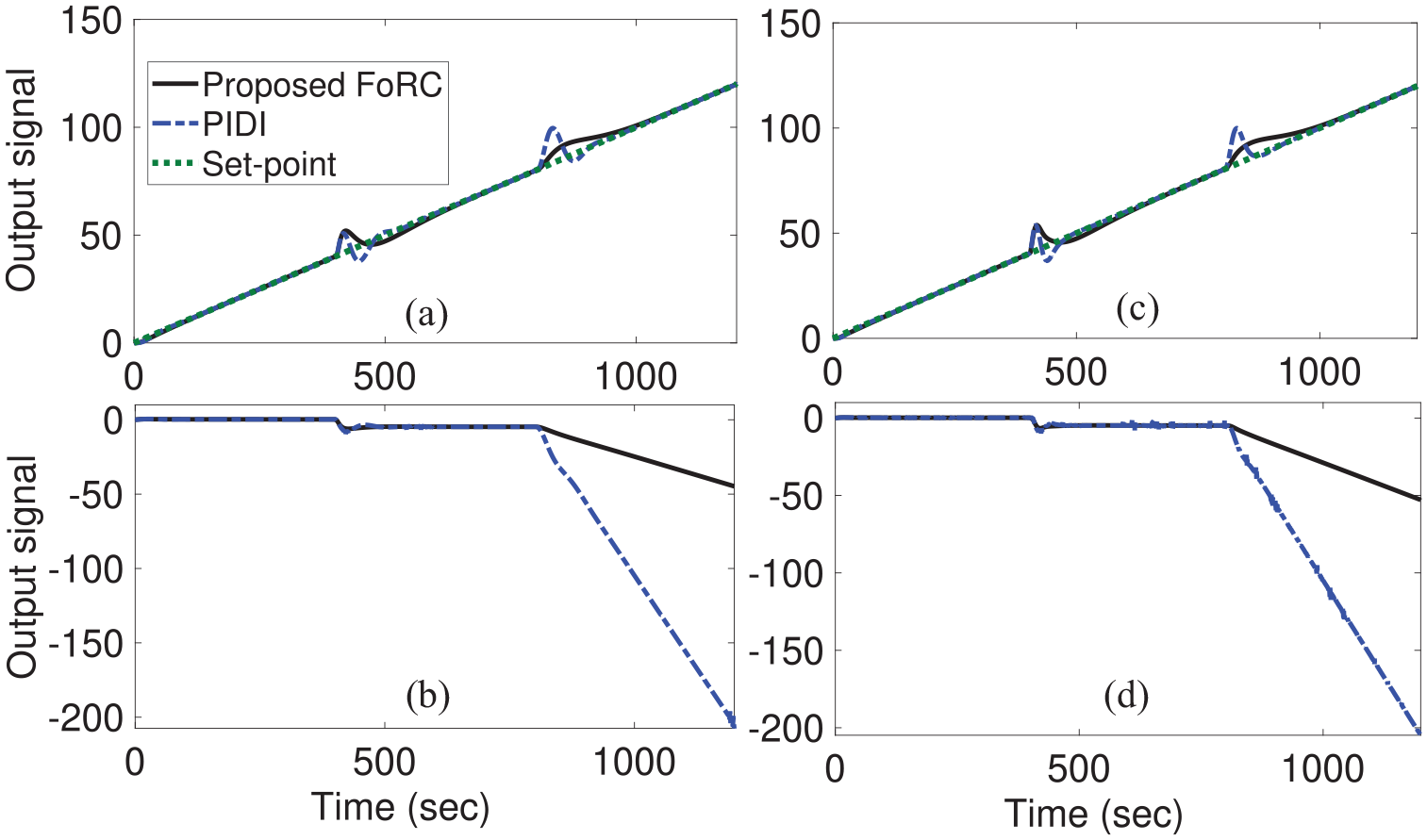
Performances are compared with step and ramp setpoints, with +30% perturbations in and . Figure 9(a) shows a unit step reference at s, a step disturbance of magnitude ±1 at sec and a ramp disturbance with slope 0.01 at 2000 s. Figure 9(c) shows 0.01 slopped ramp input at s a step disturbance of magnitude +50 at s and ramp disturbance with slope one at 2000 s. Corresponding control signals are plotted in Figure 9(b) and (d), respectively. Again, it is proven from the comparative results that the proposed controller can handle both situations better with fewer tuning parameters.
Perturbed : (a) Step tracking output. (b) Control signal. (c) Ramp tracking output. (d) Control signal.
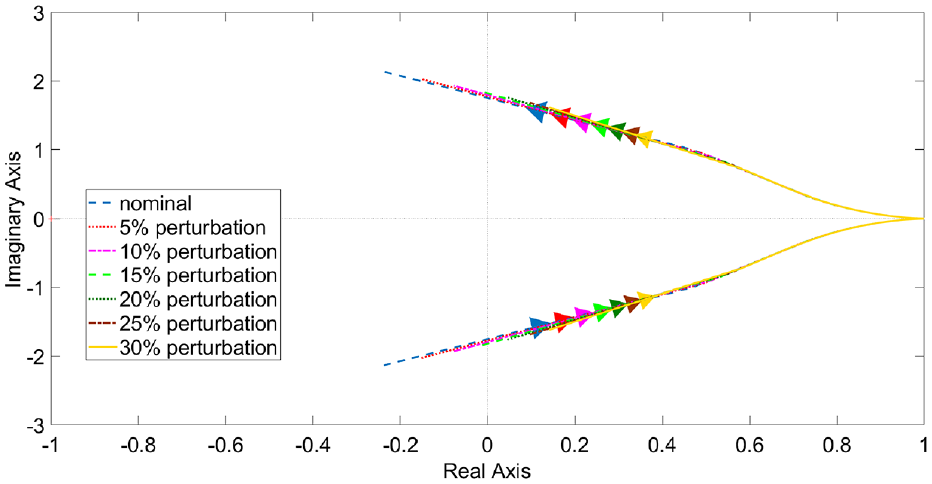
Further, the robustness is checked with an uncertainty bounding set ranging from 0% to 30% variations in both and , the family of closed-loop characteristic polynomials is defined as , and the value sets of the polynomials are plotted in Figure 10. The family of polynomials is identified as robustly stable, meeting the zero exclusion condition as outlined in Remark 3.
Value sets of characteristic polynomials for .
After transformation in the -plane, the closed-loop roots for this particular case study are obtained as , and with these roots, the outcome of (23) is . Hence, it shows that the system is stable.
Extension of the proposed FoRC method to a broad class of systems
The explicit approach can be extended to a broad class of plants. In order to handle other model types, the control structure in Figure 1 has been modified as shown in Figure 11. In this figure, is a proportional-derivative (PD) controller in the inner loop to stabilize the plant and is the delay-free part of the process.
Modified closed-loop control structure.
In this modification, both controllers are designed independently. Firstly, the controller is tuned using the maximum sensitivity criterion. Following this, is designed using the same target loop approach as explained previsouly.
Design of for fractional integrating processes
Let us consider a fractional integrating process as:
and inner loop controller taken as a PD controller. So, one can write
Now, from Figure 11, the closed loop transfer function of the inner loop can be written as:
Now consider as and using (26) and (27), equation (28) can be simplified as:
where , and with .
Design of for fractional unstable processes
Let us consider a fractional unstable process as:
By employing equations (27) and (28), along with (30), the inner closed-loop transfer function can be represented as:
where , and with .
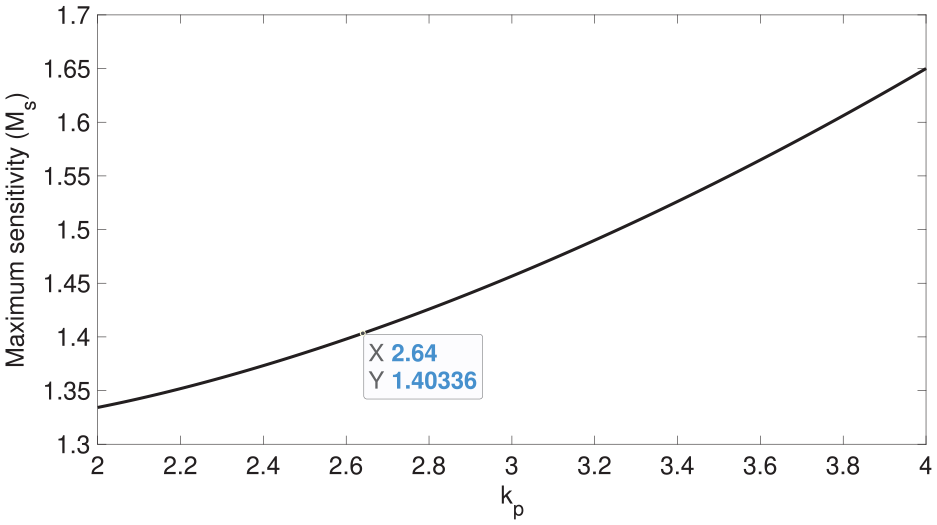
The value of single tuning parameter will be determined based on the constraints of . So, to design the inner loop controller, maximum sensitivity can be represented as:
To obtain the appropriate value of for both integrating and unstable processes, is selected.
Now, with zero external disturbances and no discrepancy between the original plant and the plant model, the open-loop transfer function from Figure 11 and (28) can be expressed as:
Next, according to the design procedure provided in Section “Proposed Controller Design,” the outer-loop controller is designed for the complete inner-loop transfer function and can be expressed as:
and
To evaluate the applicability of the proposed method in a wide range of systems, some additional case studies have been conducted as follows. The results are presented in the subsequent subsections below.
Integrating process
Let us consider a fractional integrating model as . Following the design presented in Reference,31 the inner loop PD controller for the same plant was calculated as and the outer loop PIDI controller was given as . For the proposed method, the inner loop controller parameters are obtained as from Figure 12 and . From (34) and (35), the outer loop controller is calculated as .
plot for integrating process to choose .
The outputs are compared with Reference31 for the inputs of the step and ramp signals. The respective plots are seen from Figures 13 (a) and 14 (a) and the corresponding control signals are also given in Figures 13(b) and 14(b), respectively. For Figure 13(a), simulation was performed with unit step input at s, step disturbance of magnitude at s and ramp disturbance with slope 0.005 at 800 s. The output indicated better results for the new FoRC. Figure 14(a) shows the ramp tracking, which has slopped at s. Also, assuming a step disturbance of magnitude at s and a ramp disturbance with slope 0.5 at 800 s. In the same way, the proposed method outperformed the others. In addition, to check the effectiveness of uncertainties, a study was conducted with +30% changes in both the gain and delay of the process simultaneously. The results for both the step and ramp signals are plotted in Figures 13(c) and 14(c). It is clear from these results that the proposed FoRC exhibits superior performance in terms of both servo and regulatory responses in the case of step signals while maintaining competitive performance in the presence of ramp signals.
Step tracking : (a) Output. (b) Control signal. (c) Perturbed output. (d) Perturbed control signal.
Ramp tracking : (a) Output. (b) Control signal. (c) Perturbed output. (d) Perturbed control signal.
Further, the robustness is checked with an uncertainty bounding set ranging from 0% to 30% variations in both and , the family of closed-loop characteristic polynomials is defined as , and the value sets of polynomials are plotted in Figure 15. The family of polynomials deemed robustly stable due to its fulfillment of the zero exclusion condition, as noted in Remark 3.
Value sets of characteristic polynomials for .
After transformation in the -plane, the closed-loop roots for this particular case study are obtained as , and with these roots, the outcome of (23) is . Hence, it shows that the system is stable.
Unstable process
Let us consider a fractional unstable process studied in Reference.38 The plant model is given as . Following the design presented in Reference,31 the inner loop PD controller for the same plant was calculated as and the outer loop PIDI controller was given as . For the proposed method, the inner loop controller parameters are obtained as from Figure 16 and . From (34) and (35), the outer loop controller FoRC is calculated as .
plot for unstable process to choose .
The outputs are compared with Reference31 for the inputs of the step and ramp signals. The respective plots are shown in Figures 17(a) and 18(a) and the corresponding control signals are also given in Figures 17(b) and 18(b), respectively. For Figure 17(a), simulation was performed with unit step input at s, step disturbance of magnitude at s and ramp disturbance with slope 0.005 at 800 s. The output indicated better results for the new FoRC. Figure 18(a) shows the ramp tracking, which has 0.1 slopped at s. Also, assuming a step disturbance of magnitude at s and a ramp disturbance with slope 0.5 at 800 s. In the same way, the proposed method outperformed the others. In addition, to check the effectiveness of uncertainties, a study was conducted with +30% changes in both the gain and delay of the process simultaneously. The results for both the step and ramp signals are plotted in Figures 17(c) and 18(c). It is clear from these results that the proposed FoRC exhibits superior performance in terms of both servo and regulatory responses in the case of step signals while maintaining competitive performance in the presence of ramp signals.
Step tracking : (a) Output. (b) Control signal. (c) Perturbed output. (d) Perturbed control signal.
Ramp tracking : (a) Output. (b) Control signal. (c) Perturbed output. (d) Perturbed control signal.
Further, the robustness is checked with an uncertainty bounding set ranging from 0% to 30% variations in both and , the family of closed-loop characteristic polynomials is defined as , and the value sets of polynomials are plotted in Figure 19. The family of polynomials deemed robustly stable due to its fulfillment of the zero exclusion condition, as discussed in Remark 3.
Value sets of characteristic polynomials for .
After transforming into the -plane, the closed-loop roots for this case study are , and with these roots, the outcome of (23) is . Hence, the system is shown to be stable.
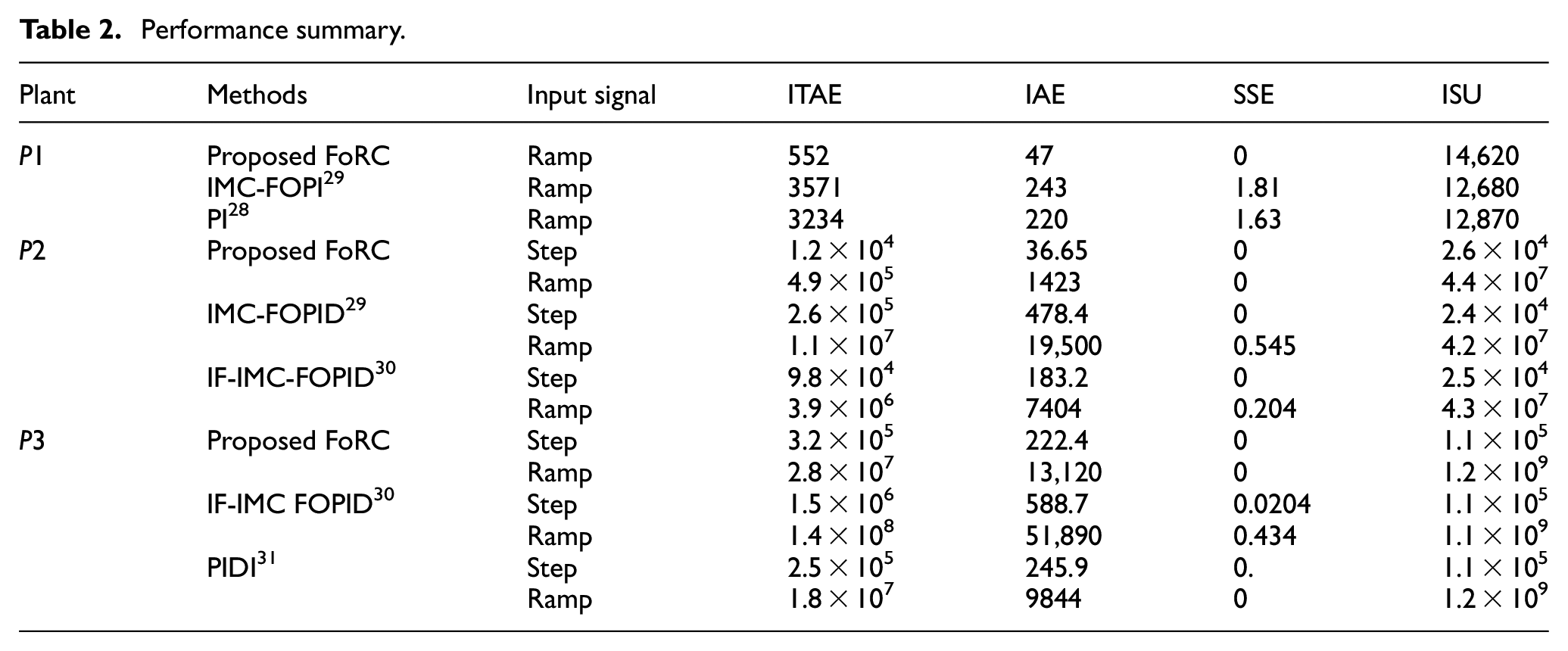
Robustness verification
The quantitative values are calculated for comparisons such as ITAE, IAE, steady-state error (SSE) and the integral of the square of the control signal (ISU) in Table 2. It can be seen from the table that the FoRC demonstrates superior performance, particularly with ramp inputs, without any steady-state error.
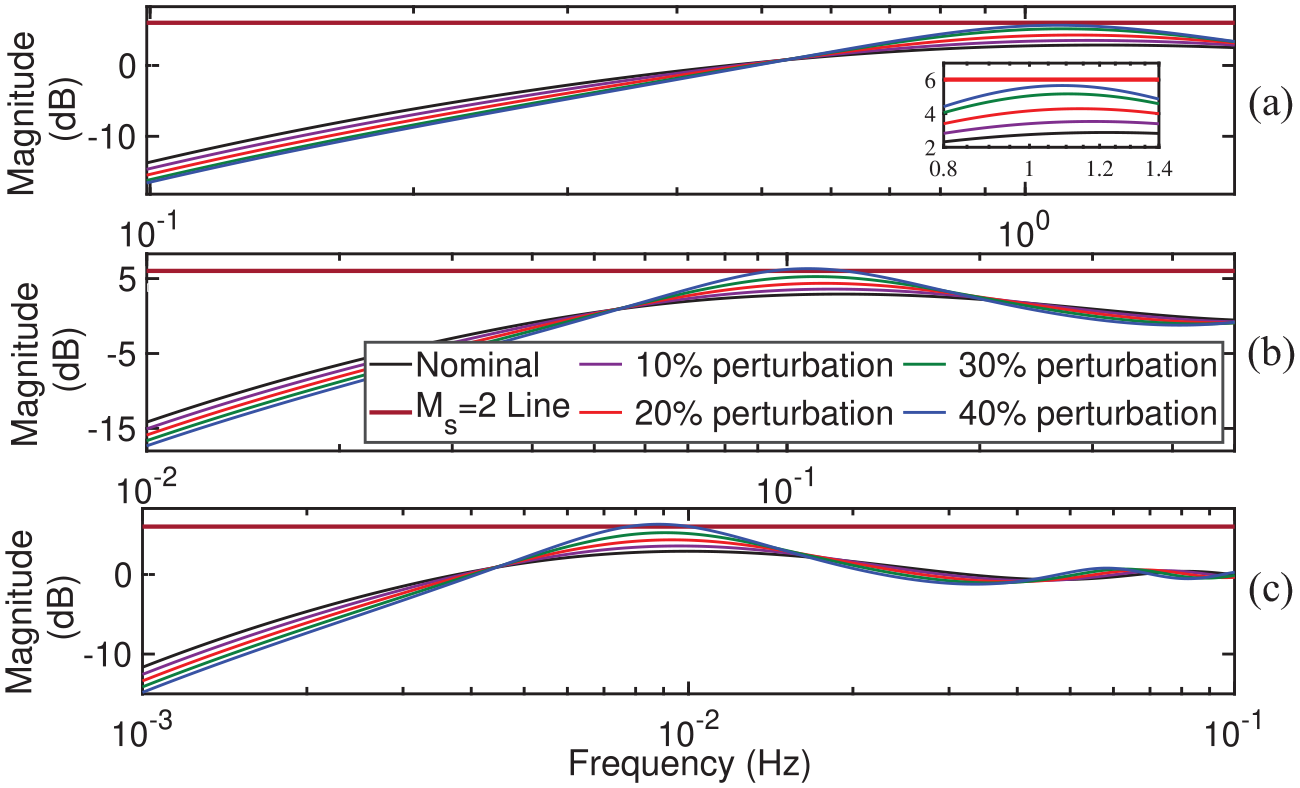
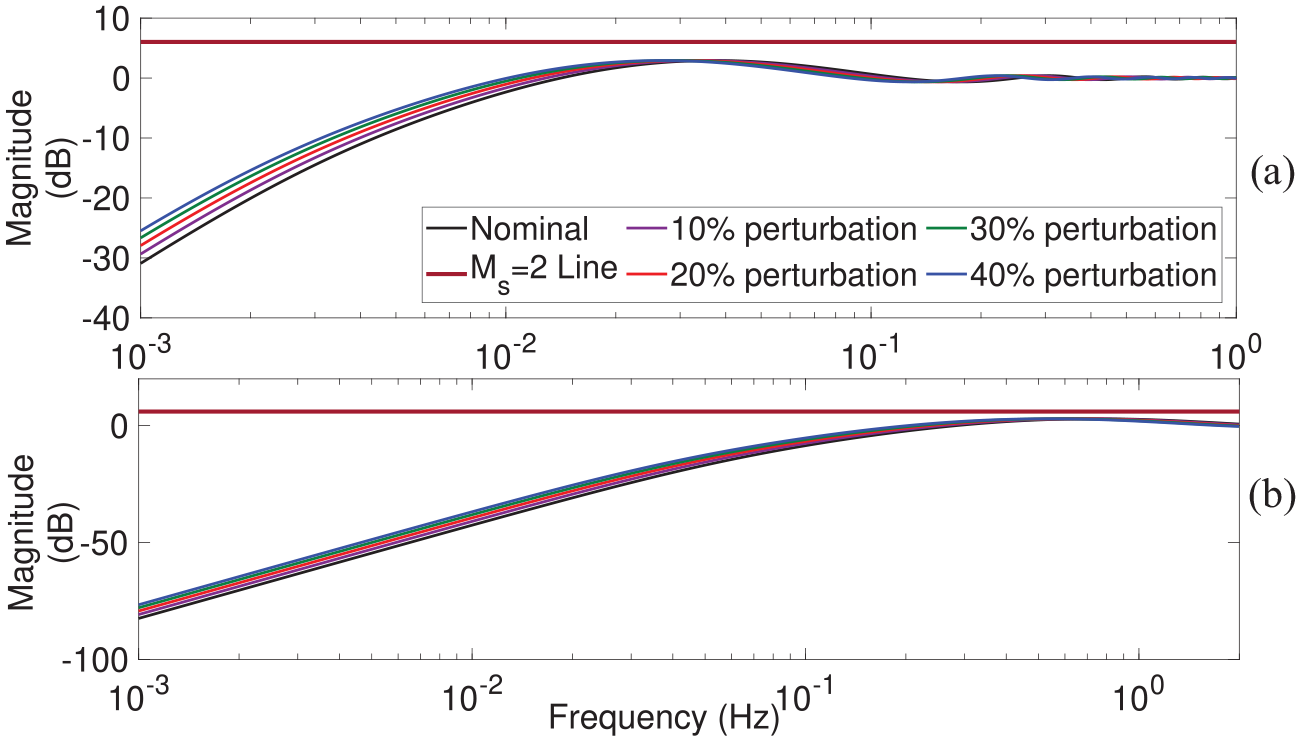
More importantly, the new controller was tested for parameter uncertainty. After changing the plant parameters and keeping the same controller setting, the maximum robustness index was achieved from the FoRC. The closed loop magnitude ensures the below 2 even after 40% changes in and together. Figures 20 and 21 show the perturbed results from all five examples. It is noted that the proposed design is capable of handling large perturbations.
Robustness check for extended studied plants: (a) . (b) .
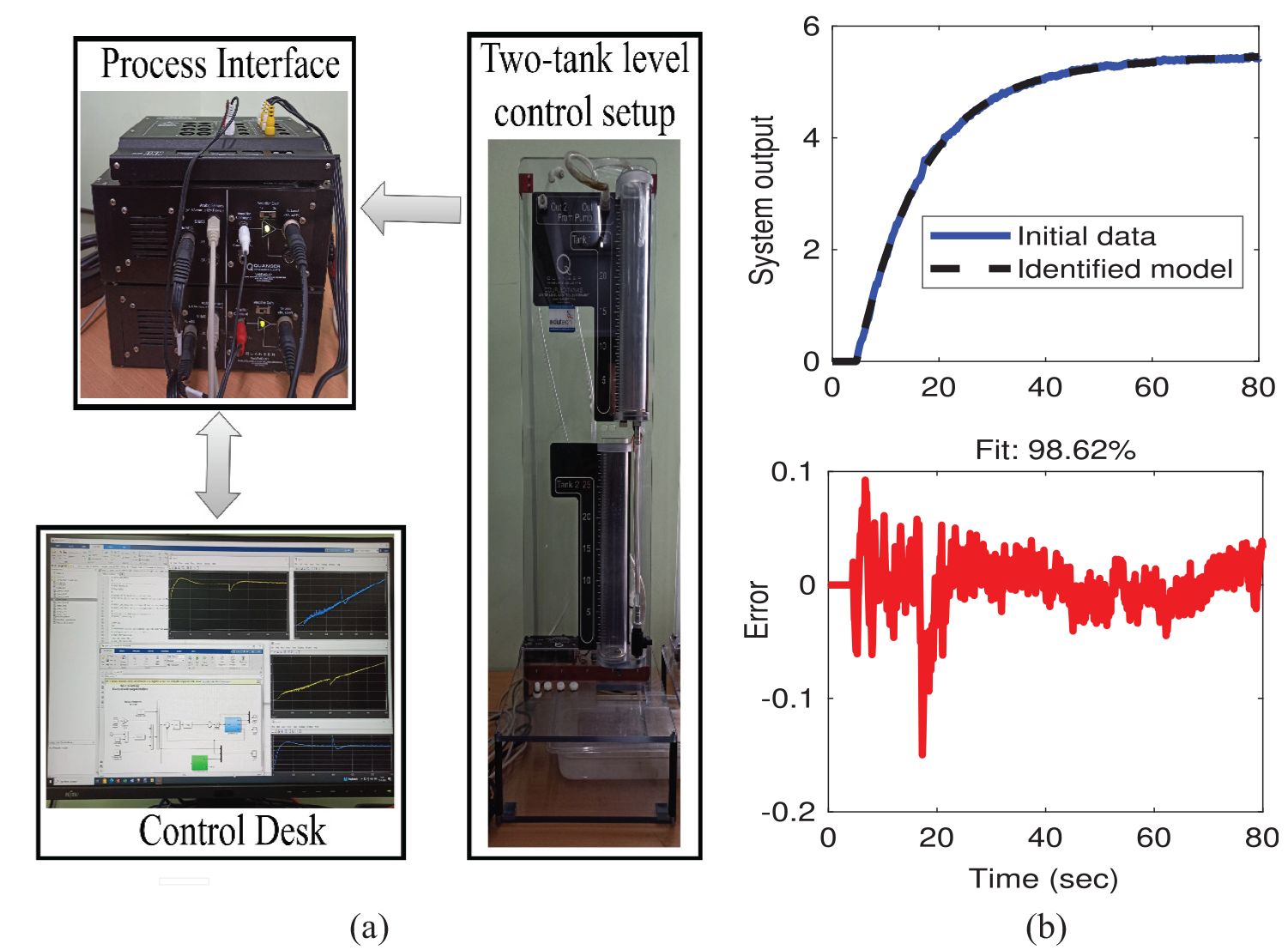
Experimental study
The novel FoRC was tested on a two-tank liquid level setup as seen from Figure 22(a). Here, water is supplied from a reservoir tank to a cascaded two-tank configuration through a water flow line. The control objective is considered to keep the level of tank 2 at its required set level by adjusting the input voltage to the pump.
Liquid level control system. (a) Experimental setup. (b) Practical data and open-loop fractional-order model output.
A fixed voltage is applied to the pump in the setup and the water level in tank 2 is recorded. Using these measured output data, we have estimated a model of the practical setup. The Trust-Region Reflective Newton algorithm, with a 0.002 s sampling time, is employed in the system identification toolbox in MATLAB and the FOMCON toolbox to determine the parameters. The fractional order model of the actual plant, which achieves a fitness of 98.68% as shown in Figure 22(b), is identified as:
Implementing the proposed FoRC controller in two-tank liquid level setup is carried out using MATLAB/Simulink, employing the FOMCON toolbox. The effective implementation of the FoRC controller relies heavily on employing fractional-order integral and differential components. The Oustaloup approximation technique is one of the most commonly employed methods to derive fractional-order approximations. The FoRC controller with optimal parameters (frequency range) and (order of approximation) is used considering complexity and accuracy.
Following the proposed method and using explicit formulas from (10) and (12), we obtained . For the same plant, the PIDI controller using the latest method in Reference31 was calculated as .
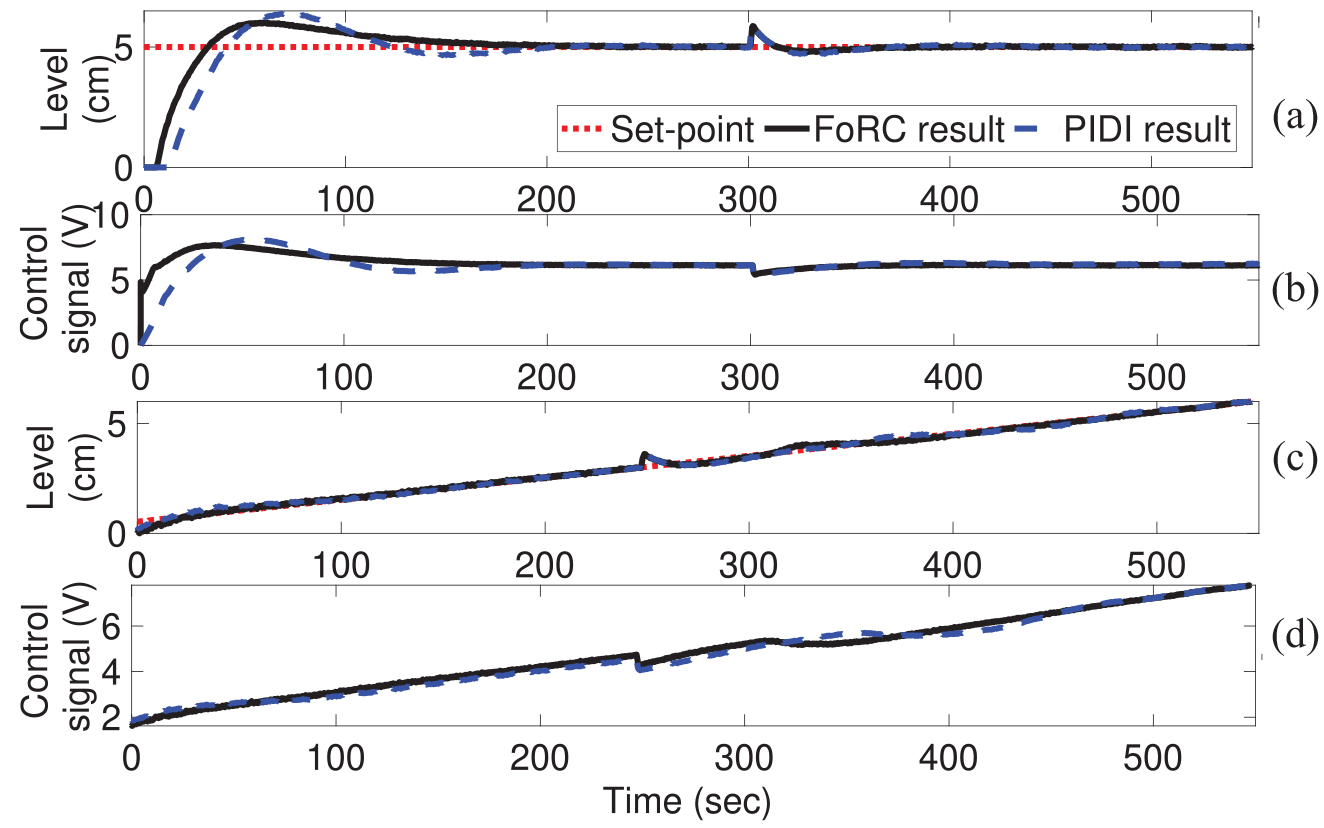
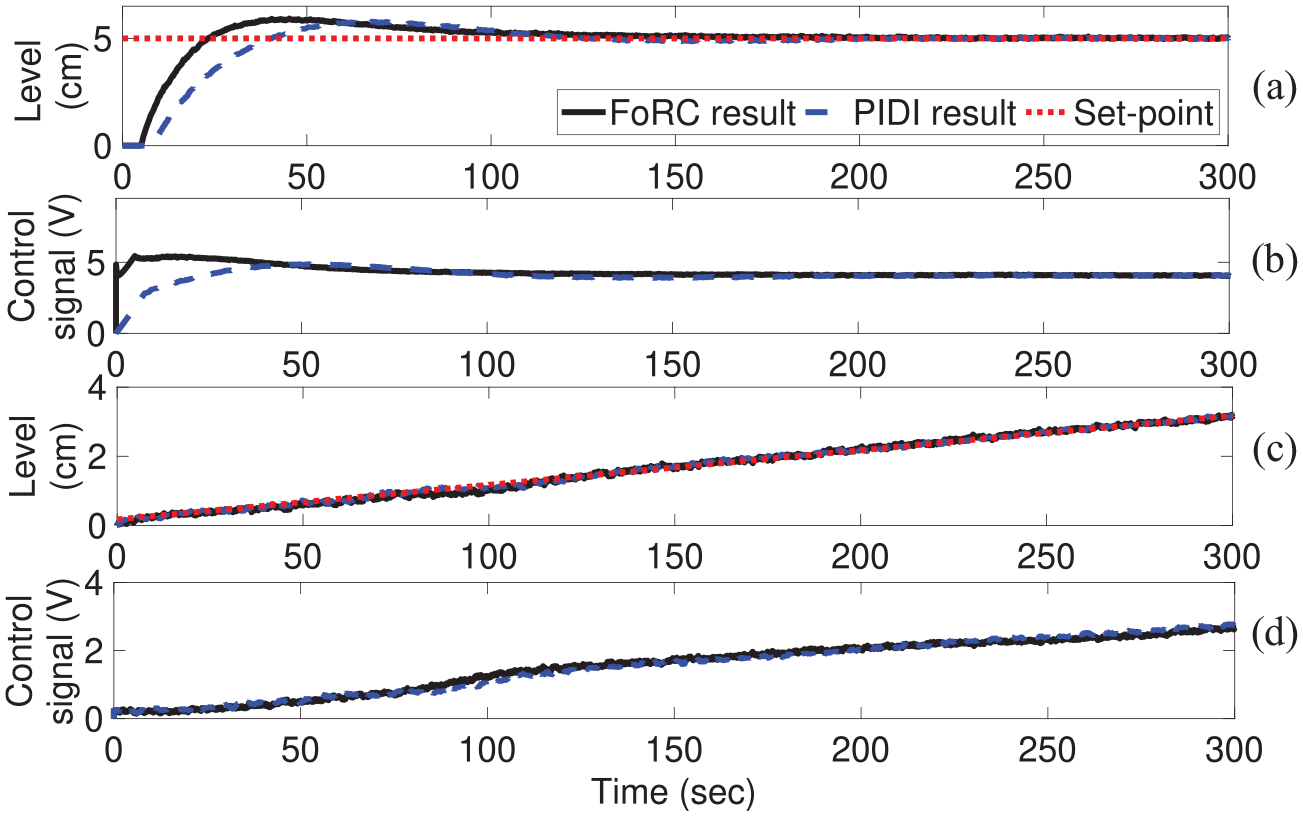
Firstly, we have checked the performance of the step tracking. The required water level was set at 5 cm, and to verify the regulatory result, a small amount of water was manually added as a disturbance in tank 2 at 300 s. The output result is seen from Figure 23(a) and corresponding control signal in Figure 23(b). More importantly, we have verified the performance with the ramp setpoint. The experiment was carried out with a 0.01 sloped ramp input with a manually added disturbance at 250 s. The ramp tracking results are seen from Figure 23(c) and (d). It is clear from the real-time tests that the proposed FoRC exhibits superior performance in terms of both servo and regulatory responses in the case of step signals while maintaining competitive performance in the presence of ramp signals.
The quantitative values are calculated for comparisons like ISE, ITAE, IAE, ISU in Table 3. It can be seen from the table that the FoRC demonstrates superior performance in all cases.
Furthermore, to evaluate the efficiency of the proposed controller under the influence of a step disturbance as well as modeling variations, an experiment is conducted with the disturbance valve kept open. Keeping the same initial controller values, the results are obtained again. As seen in Figure 24, the proposed approach provided consistent performance even when the plant varied and step disturbances were presented.
Experimental results with modeling variations and step disturbance: Step tracking: (a) Output. (b) Control. Ramp tracking: (c) Output. (d) Control.
Conclusions
This paper presented a target loop-based fractional-order control technique for fractional-order plant models. Unlike the most prevalent techniques on PID and FOPID, a new FoRC can handle changing ramp signals. The plant model and the desired robustness generated the explicit relation for the tuning of the parameters. When the design was validated using industrial processes and compared to other high-order fractional controllers, the new FoRC exceeded expectations. It can be seen from the quantitative analysis that the FoRC demonstrates superior performance, particularly with ramp inputs, without any steady-state error. The proposed design can also handle large perturbations in the parameters of the plant model, up to 40% simultaneously in and . Experimentation has demonstrated that the design steps are straightforward and realizable in real time. In addition, the detailed experimental analysis proves the value of the tuning approach. The authors are of the opinion that the method will contribute significantly to industrial fractional-order control. Extending the application of FoRC to more complex industrial systems, including multi-input multi-output systems, could be considered as the future scope of the work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iDs
Sudipta Chakraborty
Utkal Mehta
References
1.
ChakrabortySNaskarAKGhoshS. Inverse plant model and frequency loop shaping-based PID controller design for processes with time-delay. Int J Autom Control2020; 14(4): 399–422.
2.
ChakrabortyS. A new analytical approach for phase-margin specification-based target-loop selection for different class of dead-time processes. Int J Autom Control2022; 16(1): 125–135.
3.
DasDChakrabortySRajaGL. Enhanced dual-DOF PI-PD control of integrating-type chemical processes. Int J Chem Reactor Eng2023; 21(7): 907–920.
4.
BingiKIbrahimRKarsitiMN, et al. A comparative study of 2DOF PID and 2DOF fractional order PID controllers on a class of unstable systems. Arch Control Sci2018; 28(4): 635–682.
5.
DastjerdiAAVinagreBMChenY, et al. Linear fractional order controllers; a survey in the frequency domain. Annu Rev Control2019; 47: 51–70.
6.
MeenaRDasDChandra PalV, et al. Smith-predictor based enhanced Dual-DOF fractional order control for integrating type CSTRs. Int J Chem Reactor Eng2023; 21(9): 1091–1106.
7.
ShalabyREl-HossainyMAbo-ZalamB, et al. Optimal fractional-order PID controller based on fractional-order actor-critic algorithm. Neural Comput Appl2023; 35(3): 2347–2380.
8.
BettayebMMansouriR. Fractional IMC-PID-filter controllers design for non-integer order systems. J Process Control2014; 24(4): 261–271.
9.
AryaPPChakrabartyS. A robust internal model-based fractional order controller for fractional order plus time delay processes. IEEE Control Syst Lett2020; 4(4): 862–867.
10.
PatilMDVadirajacharyaKKhubalkarSW. Design and tuning of digital fractional-order PID controller for permanent magnet DC motor. IETE J Res2023; 69(7): 4349–4359.
11.
MeenaRChakrabortySPalVC. IMC-based fractional order TID controller design for different time-delayed chemical processes: case studies on a reactor model. Int J Chem Reactor Eng2023; 21(11): 1403–1421.
12.
ZhengWChenYWangX, et al. Robust fractional order PID controller synthesis for the first order plus integral system. Meas Control2023; 56(1-2): 202–214.
13.
GnaneshwarKKumarVSharmaS, et al. Non-parametric fractional-order controller design for stable process based on modified relay. J Contr Decis2024; 1–13. DOI: 10.1080/23307706.2024.2312520.
14.
ChandanaNKiranmayiR. Fractional Order IMC-TDD Controller for integrating process using firefly optimization algorithm. J Syst Eng Electronics2024; 34(4). DOI: 10.14118/jsee.2024.V34I4.1558.
15.
Merrikh-BayatF. A uniform LMI formulation for tuning PID, multi-term fractional-order PID, and tilt-integral-derivative (TID) for integer and fractional-order processes. ISA Trans2017; 68: 99–108.
16.
MehtaULechappeVSinghOP. Simple FOPI tuning method for real-order time delay systems. In: KonkaniABeraRPaulS (eds.) Advances in systems, control and Automation. Lecture Notes in Electrical Engineering, (vol. 442). Singapore: Springer, 2018, pp. 459–468.
17.
AryaPPChakrabartyS. Robust internal model controller with increased closed-loop bandwidth for process control systems. IET Control Theory Appl2020; 14(15): 2134–2146.
18.
RajUShankarR. Optimally enhanced fractional-order cascaded integral derivative tilt controller for improved load frequency control incorporating renewable energy sources and electric vehicle. Soft Comput2023; 27(20): 15247–15267.
19.
MehtaUAryanPRajaGL. Tri-parametric fractional-order controller design for integrating systems with time delay. IEEE Trans Circuits Syst II Express Briefs2023; 70(11): 4166–4170.
20.
DasDChakrabortySMehtaU, et al. Fractional dual-tilt control scheme for integrating time delay processes: studied on a two-tank level system. IEEE Access2024; 12: 7479–7489.
21.
Ma'ArifACahyadiAIHerdjunantoS, et al. Tracking control of high order input reference using integrals state feedback and coefficient diagram method tuning. IEEE Access2020; 8: 182731–182741.
22.
CorderoREstrabisTBatistaEA, et al. Ramp-tracking generalized predictive control system-based on second-order difference. IEEE Trans Circuits Syst II Express Briefs2021; 68(4): 1283–1287.
23.
TavazoeiMS. Ramp tracking in systems with nonminimum phase zeros: one-and-a-half integrator approach. J Dyn Syst Meas Control2016; 138(3): 031002.
24.
WeiseCTavaresRWulffK, et al. A fractional-order control approach to ramp tracking with memory-efficient implementation. In: 2020 IEEE 16th international workshop on advanced motion control (AMC), 2020, pp. 15–22. DOI: 10.1109/AMC44022.2020.9244309.
25.
WuZLiDXueY. A new PID controller design with constraints on relative delay margin for first-order plus dead-time systems. Processes2019; 7(10): 713.
26.
LimSYookYHeoJP, et al. A new PID controller design using differential operator for the integrating process. Comput Chem Eng2023; 170:: 108105.
27.
RanjanAMehtaU. Fractional-order tilt integral derivative controller design using IMC scheme for unstable time-delay processes. J Contr Autom Electr Syst2023; 34(5): 907–925.
28.
KareemGBGanesanB. Robust analytical proportional-integral-derivative tuning rules for regulation of air pressure in supply manifold of proton exchange membrane fuel cell. Asia Pac J Chem Eng2021; 16(1): e2569.
29.
LiDLiuLJinQ, et al. Maximum sensitivity based fractional IMC–PID controller design for non-integer order system with time delay. J Process Control2015; 31: 17–29.
30.
TrivediRPadhyPK. Design of indirect fractional order IMC controller for fractional order processes. IEEE Trans Circuits Syst II Express Briefs2021; 68(3): 968–972.
31.
DasDChakrabortySNaskarAK. Controller design on a new 2DOF PID structure for different processes having integrating nature for both the step and ramp type of signals. Int J Syst Sci2023; 54(7): 1423–1450.
32.
ChakrabortySGhoshSNaskarAK. All-PD control of pure integrating plus time-delay processes with gain and phase-margin specifications. ISA Trans2017; 68: 203–211.
33.
BarmishBRJuryE. New tools for robustness of linear systems. IEEE Trans Automat Contr1994; 39(12): 2525–2525.
34.
MatušůRŞenolBPekařL. Robust stability of fractional-order linear time-invariant systems: parametric versus unstructured uncertainty models. Complexity2018; 2018(1): 8073481.
35.
MatignonD. Stability properties for generalized fractional differential systems, in: ESAIM: proceedings, Vol. 5, EDP Sciences, 1998, pp. 145–158.
36.
ChoudharySK. Stability and performance analysis of fractional order control systems. Wseas Transactions on Systems and Control2014; 9(45): 438–444.
37.
IrudayarajAXRWahabNIAUmamaheswariMG, et al. A matignon’s theorem based stability analysis of hybrid power system for automatic load frequency control using atom search optimized fopid controller. IEEE Access2020; 8: 168751–168772.
38.
ZhengMHuangTZhangG. A new design method for PI-PD control of unstable fractional-order system with time delay. Complexity2019; 2019(1): 12.