
Abstract
The key indicator to assess the performance of a battery management system is the state of charge (SoC). Although various SoC estimation algorithms have been developed to increase the estimation accuracy, the effect of the current input measurement error on the SoC estimation has not been adequately considered in these algorithms. The majority of SoC estimation algorithms are based on noiseless current measurement models in the literature. More realistic battery models must include the current measurement modelled with the bias noise and the white noise. We present a novel method for mitigating noise in current input measurements to reduce the SoC estimation error. The proposed algorithm is validated by computer simulations and battery experiments. The results show that the proposed method reduces the maximum SoC estimation error from around 11.3% to 0.56% in computer simulations and it is reduced from 1.74% to 1.17% in the battery experiment.
Keywords
Introduction
Concerns regarding energy conservation and environmental protection have increased the popularity of electric vehicles (EVs). Despite their increasing popularity, their performance still need to be improved. Existing EVs have a significantly lower driving range compared to traditional internal combustion engine-based vehicles. Another issue regarding EVs is to miscalculate the remaining power, leaving passengers stranded. These are due to the lack of an efficient battery management system (BMS) that can accurately estimate the remaining power of a battery pack. In this sense, the state of charge (SoC) is a key parameter to ensure a longer driving range with reliable remaining power. Optimal SoC estimation maximises battery energy utilisation, resulting in increased driving range. It is also vital to inform the driver about the current driving range and avoid the harmful consequences of overcharging or overdischarging the battery. The majority of investigations to improve the SoC estimation accuracy primarily focus on algorithm development with no current measurement error assumption.
The SoC is the ratio of the available battery capacity to the maximum battery capacity. 1 It cannot be directly measured but can be calculated or estimated using current and voltage measurements. There are various types of SoC estimation algorithms divided into two main groups: model-free methods and model-based methods. 2 Two most widely used model-free methods are Coulomb counting (CC) and open circuit voltage (OCV) measurement methods. The CC method determines the remaining capacity of a battery by integrating the current flowing in and out of the battery over time. However, noisy current measurement is not the only disadvantage of this method but also the correct initial SoC guess is required for high accuracy. 3 The OCV measurement method measures the terminal voltage when the battery is in a steady state for a sufficient time, for example, 1 h. 4 The measured terminal voltage is assumed to be equal to the OCV and then converted to the SoC through a look-up table, which is obtained by laborious laboratory work. This method is not practical since it requires a long relaxation period and a look-up table.
State of health (SoH) is another important indicator in battery systems and it refers to how well a battery is performing in comparison to its fresh condition. In literature, there are various approaches to calculating SoH accurately. In the work by Guo et al., 5 an SoH estimation algorithm using the SSA-Elman model is proposed. Battery features and capacity are better correlated using this method. In the work by Li et al., 6 an improved electrochemical impedance spectroscopy (EIS) method is introduced to estimate SoH. The improved method increases the equivalent circuit model (ECM) accuracy and reduces the error in the SoH estimation error. An attention mechanism and bidirectional long short-term memory neural network are combined in Guo et al. 7 for estimating SoH. Three features as input of the model are chosen from the incremental capacity curve.
Model-based SoC estimation algorithms require a battery model to reflect the battery dynamics. Electrochemical models and ECMs are the two most common techniques used in battery modelling. In electrochemical models, complex differential equations are used to describe the electrochemical process taking place inside the battery. 8 The pseudo-two-dimensional (P2D) model is one of the electrochemical models existing in the literature. P2D models are based on the porous electrode theory, concentrated solution theory and kinetic equations. 9 Another electrochemical model is the single-particle model (SPM) which was developed to simplify the P2D model. In the SPM, it is assumed that multiple uniform-sized spherical particles form the electrodes and the current distribution is uniform along both electrodes. 10 The electrochemical models can explain battery dynamics in terms of the main electrochemical reactions occurring inside a battery. However, their onsite accuracy is low due to their complexity and numerous parameters to be identified in the models. They are generally used for the optimisation of the battery design. 11 Unlike the electrochemical models, the ECMs are frequently used in estimating the SoC due to the advantages of low computational effort and high estimation accuracy. The ECM describes the battery dynamics via basic circuit elements. In the work by Feng et al. 12 and Hossain et al., 13 it is shown that the Thevenin ECM model with one parallel resistor–capacitor (RC) branch can accurately represent the battery dynamics.
Adopting a battery model requires model parameter identification (MPI). The MPI methods are classified into two main groups: an offline method and online methods. The offline method is an experimental method to calculate the model parameters in laboratories. The hybrid pulse power characterisation (HPPC) current profile is commonly used in the experiment. 14 This method provides fixed parameter estimations. The actual model parameters change as the battery ages and the operational conditions change. Therefore, offline method cannot update the parameters according to different operational conditions and battery ageing, resulting in inaccurate SoC estimates. To adopt the parameters to the changes in operational conditions and battery ageing, online MPI methods are used. The recursive least squares (RLS) method is one of the most popular online methods found in literature.15,16 In the work by Xia et al., 17 a forgetting factor RLS method is introduced to minimise the influence of old data on the current estimate. However, the noisy current input measurement deteriorates the performance of RLS-based parameter identification methods. 18 In this case, the adaptive law-based MPI method can be an alternative. This method guarantees the stability of the parametric uncertainties based on the Lyapunov direct method. 19
The Kalman filter (KF) family has been used in ECM-based SoC estimation algorithms due to its simplicity and powerful estimation ability.20–23 These algorithms first estimate the OCV and then convert it to the SoC using the nonlinear relationship between the SoC and the OCV.24,25 In the literature, the majority of available SoC estimation algorithms do not consider the input current measurement noise. The development of a more realistic SoC estimation algorithm requires taking into account the input noise.
Error is always present in the current measurement, which is the input of both current counting and voltage-based correction methods. Thus, the current measurement error causes SoC error in both methods. 26 The current measurement is corrupted by the current bias noise and the white noise.27,26 The impact of these noises is significantly different. The white noise does not have a significant effect on the SoC estimation error. 28 The extended Kalman filter (EKF) can accurately estimate the SoC based on the current sensor measurement with the large random white noise. 29 However, it is found that the bias noise substantially increases the error in the SoC estimation. 27 In the work by Liu and He, 30 the effect of the bias noise on the SoC estimation is investigated. The bias noise of ± 10 A is injected into the SoC estimation algorithm during the simulation. It is observed that the SoC estimation error is out of the tolerable range by 5%, which may cause overcharging or discharging of the battery in real-time applications. In the work by Liu et al., 31 it is found that the bias noise may reach up to 1% in the battery experiments. It can reach up to 200 mA in practice due to the electromagnetic environment and the temperature. In the work by Liu et al., 31 the bias noise is treated as a constant parameter to be estimated with battery model parameters. The convergence of battery model parameters to their actual values is not guaranteed; therefore, the bias convergence to its actual value cannot be guaranteed. Incorrect bias estimation would lead to erroneous SoC estimation. In the work by Xu et al., 21 a dual KF algorithm is proposed to filter the SoC twice to reduce the current measurement error and battery modelling error. Despite the increased computational cost, this method cannot provide a certain mitigation of the bias noise. In the work by Hou et al., 32 the SoC is estimated for portable devices without sensing the current. The current is an unknown input that is chosen as one of the states. In the work by Chun et al., 33 a method is also developed to estimate the SoC without sensing the current measurement. The method only uses the filtered terminal voltage measurements of each cell in the battery pack. The current applied to the battery is estimated using the corresponding filtered terminal voltage measurement. To estimate the load current based on terminal voltage sensor measurements, it is necessary to use a high-quality but costly voltage sensor; otherwise, the current estimate is likely to be less accurate. An improved fuzzy adaptive KF is designed in Yan et al. 34 to estimate the SoC of EVs working under poor sensor measurements. The system noise and the measurement noise are assumed to be zero-mean white noise, and the proposed method only updates their statistical properties. However, the current sensor is also corrupted by the bias noise and it is neglected.
In literature, different noise modelling strategies have been considered. In the work by Wang et al., 35 a method is proposed to calculate the error probabilities, which characterises the estimation reliability and diagnosis accuracy stochastically. To investigate sensor measurements, data missing phenomenon is considered to address the estimation error in Chen et al. 36 In the work by Kitanidis, 37 the uncertainty in the system input is modelled as a stochastic process with a mean value that is not known and varies in time. In the work by Shu et al., 38 the corrupted measurements are characterised as a Bernoulli-distributed random sequence. In the work by Lu et al., 39 it is shown that the states and unknown system inputs can be estimated by an extended Double-Model adaptive estimation approach. The unknown time-varying input is modelled as a random walk. Then, the system and measurement models are updated based on the unknown input model. Finally, the estimation algorithm is updated based on the new system and measurement models. In this work, we modelled the current sensor as a summation of the true current, the bias noise treated as random walk and the zero-mean white noise. To the best of the authors’ knowledge, our work is the first direct attempt to consider two stochastic noises in the current measurement in the SoC estimation.
The organisation of the article is as follows: section ‘Adaptive battery model identification’ introduces the battery modelling and online MPI method, section ‘Current bias mitigation’ explains the bias noise estimation method; section ‘SoC estimation’ presents the SoC estimation method along with the modification of the standard KF algorithm; section ‘Simulations and results’ presents the computer simulation and experimental results; finally, the conclusion and the future work are presented in section ‘Conclusion and future work’.
Adaptive battery model identification
Equivalent circuit battery modelling
An accurate SoC estimation algorithm can be developed based on a battery model, which is required for the safe and efficient operation of the battery. The ECM-based battery models have been used to replicate the battery dynamic behaviour.
40
There are several ECMs found in the literature. Although Thevenin-based ECMs do not demand comprehensive knowledge regarding battery electrochemistry, they accurately reflect the battery dynamics.41,42 The first-order Thevenin model is revealing superiority over other ECMs due to its simplicity but accuracy in representing the battery dynamics.43–45,46 Figure 1 shows the ECM used in this work. The ECM has an ideal OCV source


where t is the time,
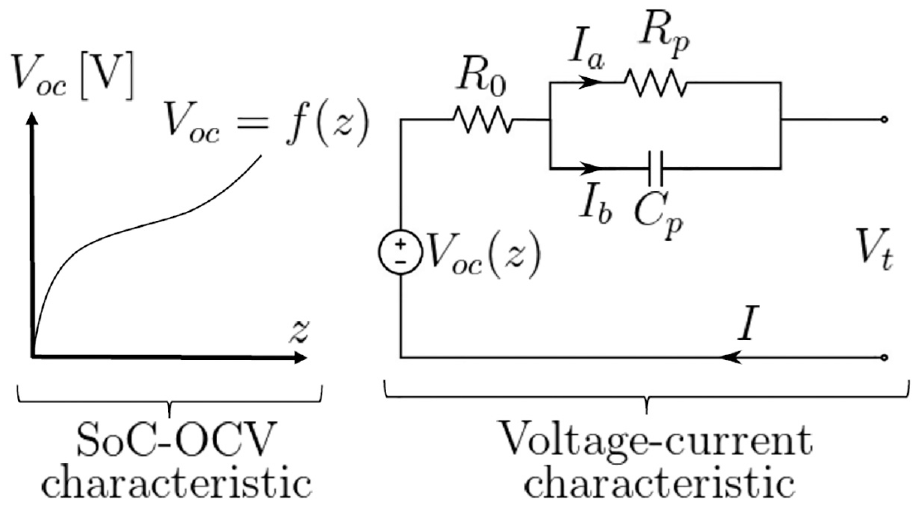
SoC–OCV nonlinear relationship and equivalent circuit model of Li-ion battery.
Online MPI
An online MPI method improves the real-time performance of SoC estimation algorithms. In this work, the adaptive law-based MPI method is adopted to estimate the model parameters in real time. The adaptive law calculates the current estimate of the parameters by adding the previous estimate of the parameters and the correction term. The correction term is calculated based on a difference between the calculated output signal and the measured output signal. Therefore, the model parameter uncertainty is overcome by parameter updating and correction.
Discrete-time expressions of equations (1a) and (1b) are of the form


where

Substitute equation (2a) into equation (3)

Rearrange equation (2b) and substitute into equation (4)
Define

where

Equation (7) can be written in the LPM as follows

where the unknown model parameters vector is given by

and the measured input vector is given by

The terminal voltage difference is calculated from two measurement samples. The measurement equation for the parameter estimation is as follows

where


where



where
Test rig design
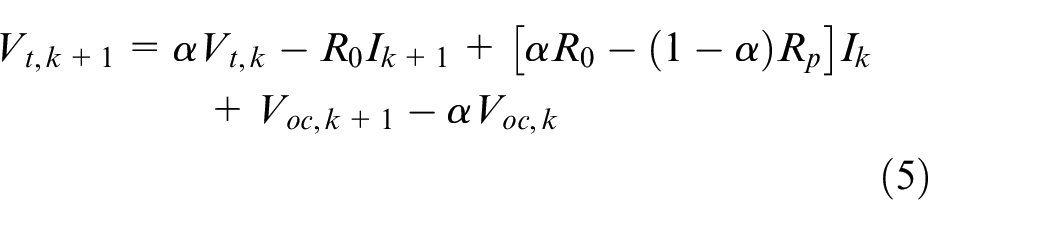
Figure 2 shows a schematic diagram of the test rig designed to run three DC motors powered by a completely new lithium polymer (LiPo) battery whose capacity is 1 Ah. The battery has two serially connected LiPo cells, which makes the battery’s upper cut-off voltage 8.4 V and lower cut-off voltage 6.4 V. CompactRIO is the microprocessor used in the test rig. A graphical user interface is designed on LabVIEW software to control the speed of DC motors. During the battery test, I and
The schematic diagram of experimental setup.
The operational conditions in the experiment.
SoC–OCV nonlinear relationship
All ECM-based SoC estimation algorithms require the nonlinear SoC–OCV relationship to convert the estimated OCV to an SoC estimate. This relationship can be obtained by a battery SoC drop test. 49 First, the battery is fully charged under a CCCV regime until it reaches the higher cut-off voltage given by the battery manufacturer. At this point, the battery is assumed to be fully charged. A fully charged battery is discharged by 5% SoC intervals until the SoC decreases to 80%. Then, the discharge interval is increased to 10% and the battery is discharged until its SoC drops to 20%. Then, the discharge interval is decreased to 5% and the battery is fully discharged. The smaller SoC discharge interval is used at low and high SoC regions to observe the nonlinearity better. The sampling time of the battery SoC drop test is 0.01 s and the experiment is repeated five times. Finally, the average values are calculated based on the collected data. A battery SoC drop test was performed on the LiPo battery and the result is given in Table 2.
The SoC–OCV relationship obtained by a battery SoC drop test.
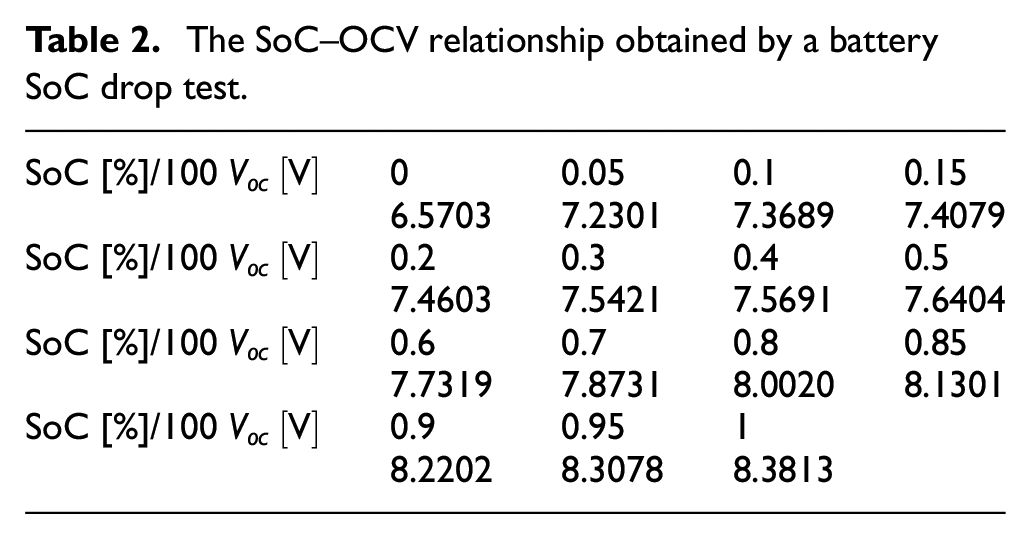
The OCV–SoC nonlinear relationship is modelled by the following nonlinear expression 50

where a, b and c are the constant coefficients, z is equal to SoC [%] divided by 100 and it is in the range of
Current bias mitigation
In battery-powered systems, the current sensor output is the current measurement which is corrupted by two different types of stochastic noise 27

where

where
In battery systems, the second measurable signal is

Rewrite equation (17) for the previous sampling time

Note that

where

Similarly, the estimate of

Subtract equation (21) from equation (20)

In equation (22), to calculate the difference of OCV at two sampling points, we could use the estimated SoC at two sampling points and convert them to the corresponding OCV using the SoC–OCV relationship. However, two estimated SoC could have inconsistent values to charging (increasing SoC) or discharging (decreasing SoC) of the battery. Instead, first, the previous value of SoC is calculated using the following CC equation

where
The one sampling step difference of the measurement residual can be calculated by subtracting equation (22) from equation (19) as follows
The difference

where
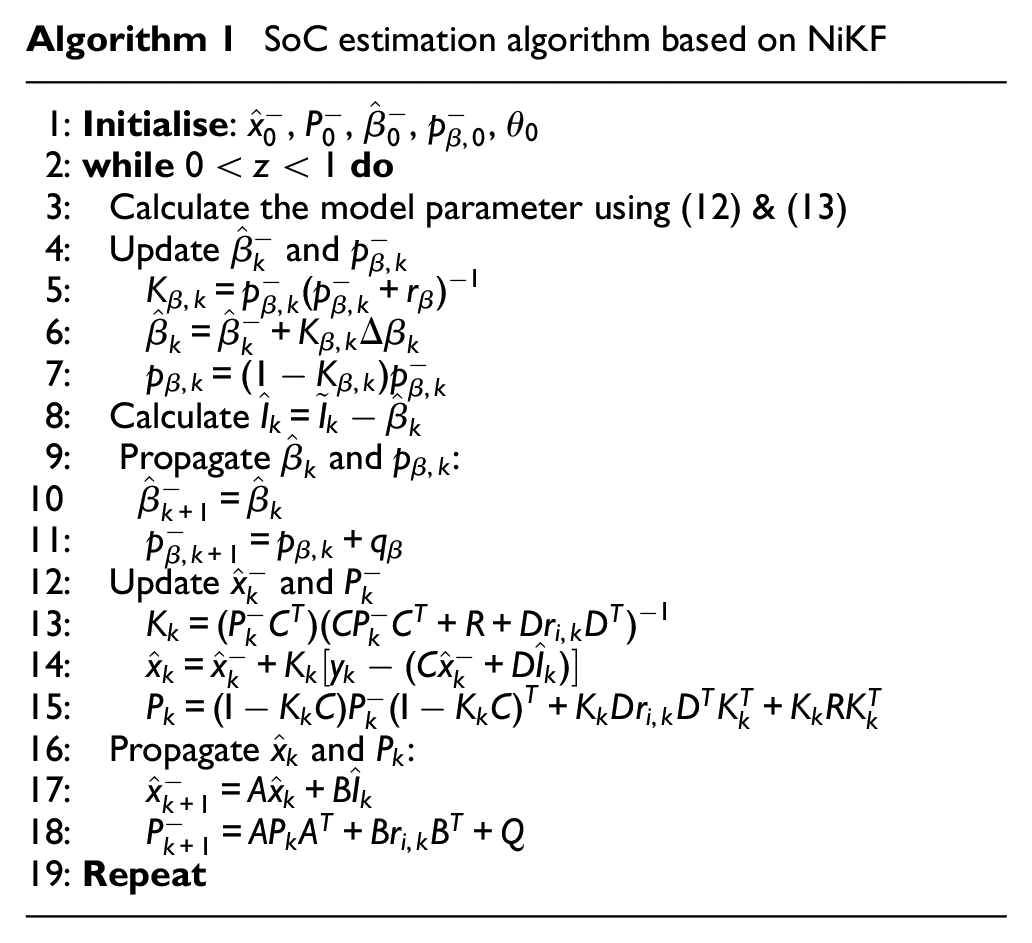
SoC estimation algorithm based on NiKF
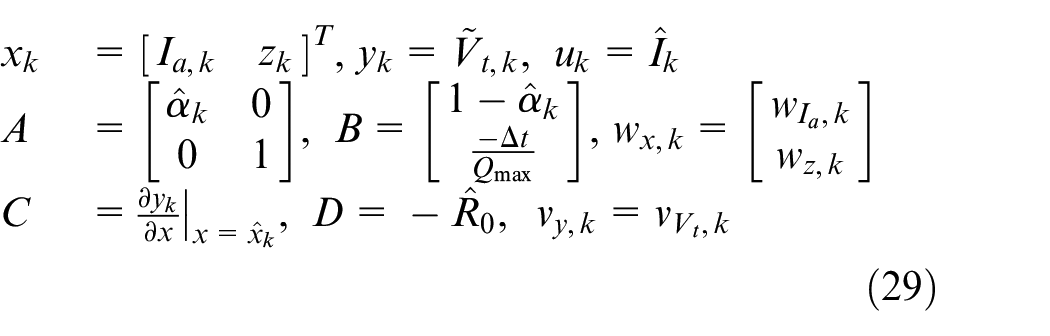
SoC estimation
The SoC propagation equation is given by

where

where


where
In practice, it is expected that the standard KF’s performance degrades due to the noisy input current measurement. Therefore, standard KF algorithm given in Kasdin
51
is reconstructed by considering the input current measurement model given in equation (15). Note that u in equations (28a) and (28b) is replaced by
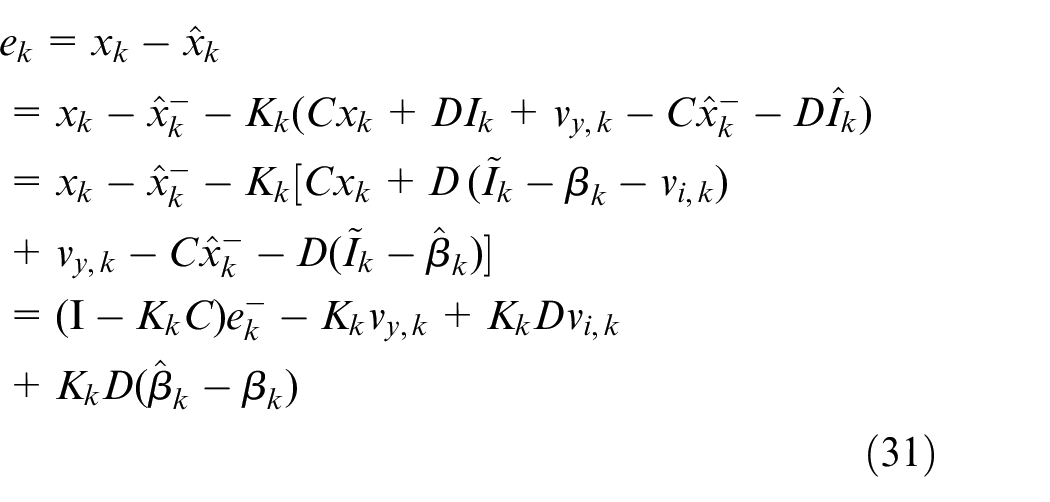
We are to derive the standard KF based on the generic model of the battery system. The derivation of the noisy input Kalman filter (NiKF) starts with updating the priori prediction of the state vector as follows

where
where

The posterior state estimation error covariance matrix is as follows
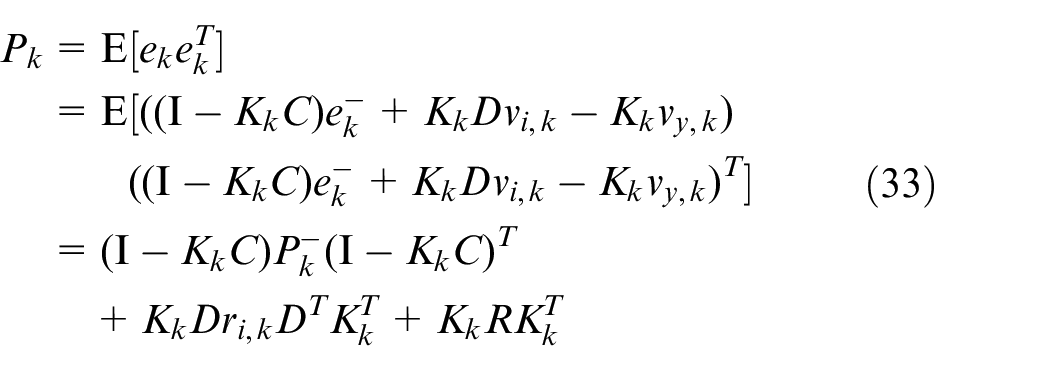
where
The Kalman gain matrix is derived by minimising the trace of

Taking the trace of equation (34) gives

Differentiate equation (35) with respect to
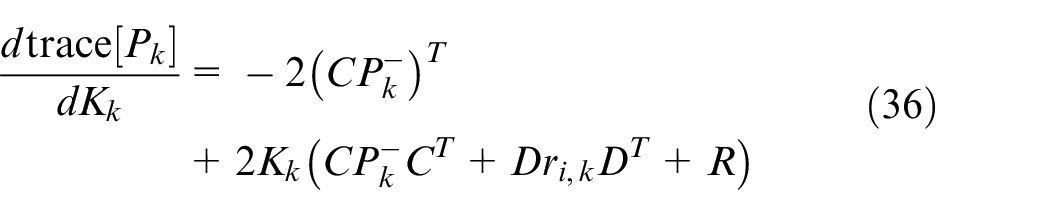
Equalising equation (36) to zero and solving for

The state is propagated as follows

The posterior error covariance matrix is propagated as follows
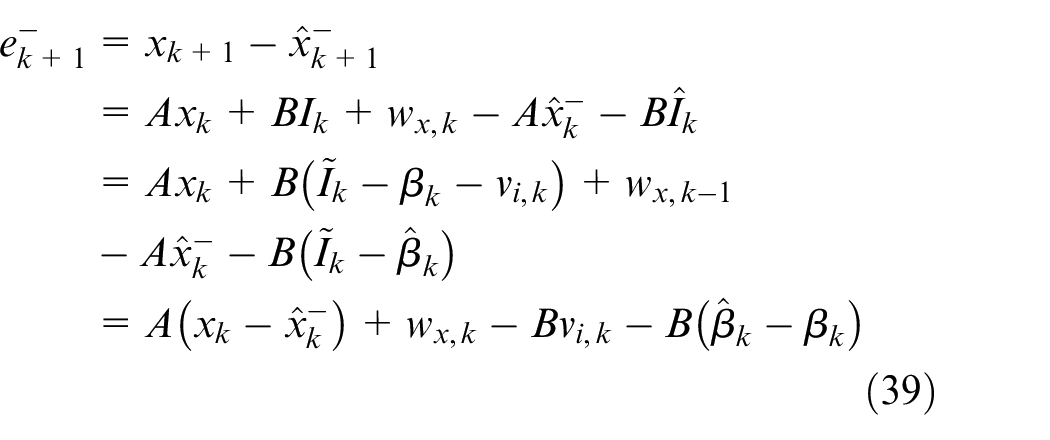
where

The prior covariance matrix is expressed as follows
Note that
Simulations and results
The first random noise corrupting the current measurement is the random walk bias


where

where

The mean value of

Hence, the variance of

The second noise corrupting the current measurement is the white noise which is a typical sensor noise whose mean is zero and distribution is Gaussian or normal


It is assumed that the
The simulated battery has the capacity of 0.85 Ah. It is fully discharged under two different dynamic loadings shown at the bottom of Figures 7 and 8. During the process, the bias noise and the white noise are added to the current input in every 0.01 s. The true battery model parameters are chosen similar to ones in equation 52 and set to

For the simulation purposes, the initial
The initial state
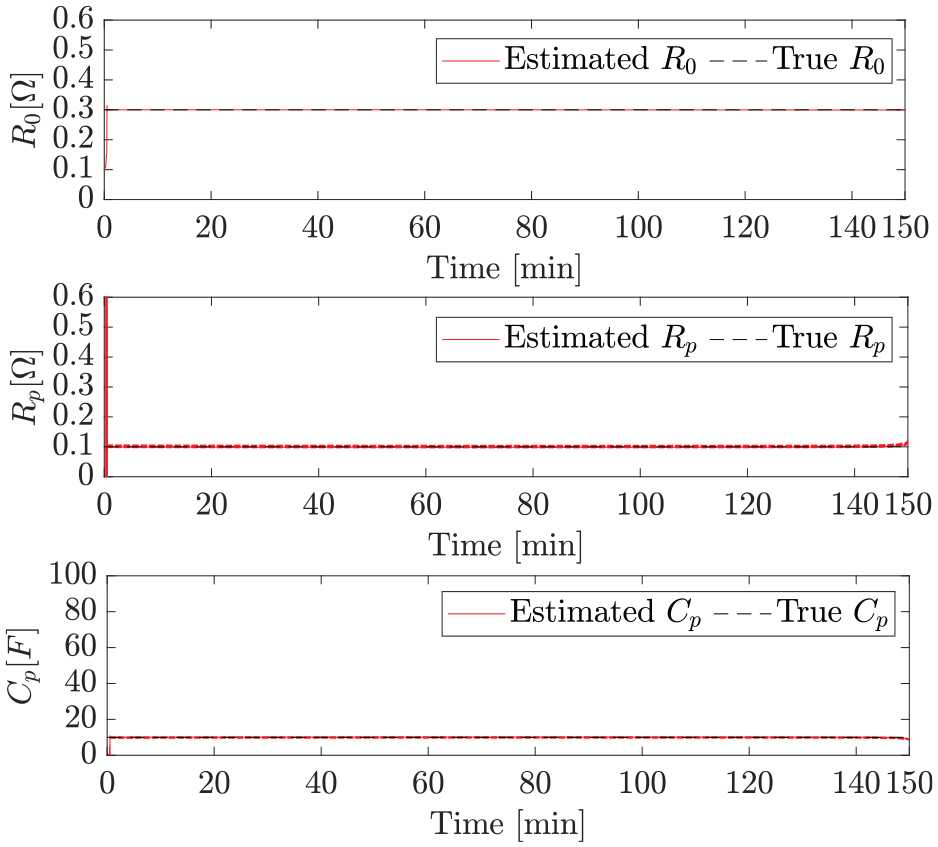
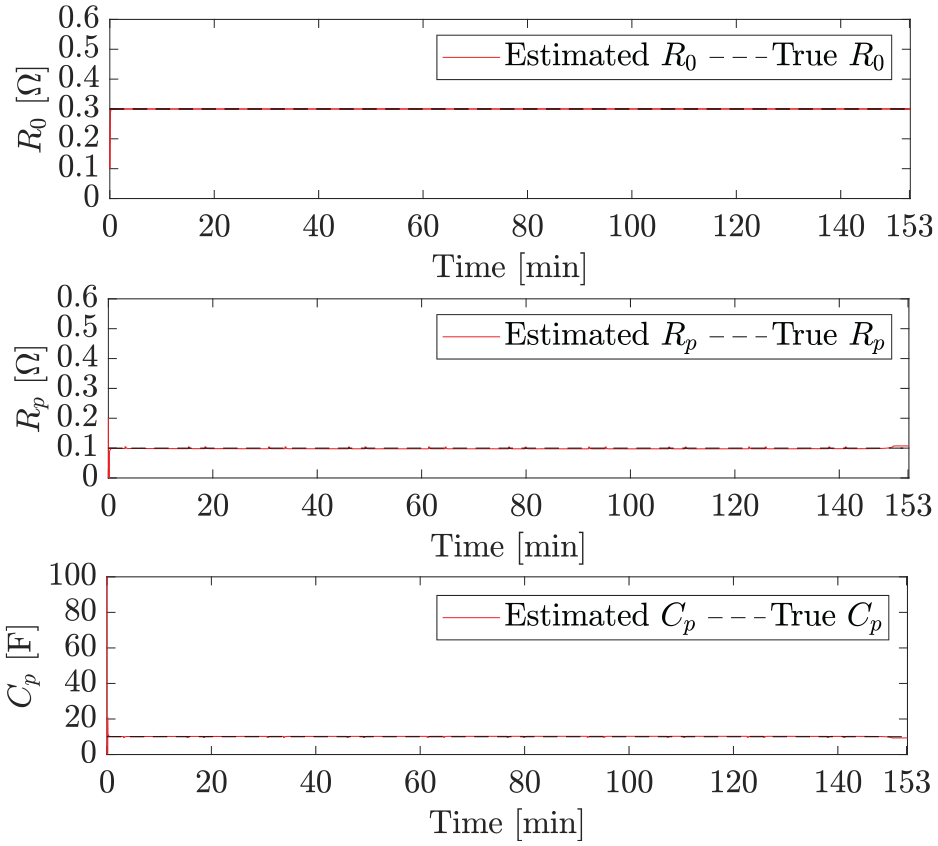
Figures 3 and 4 show that the online parameter estimation algorithm successfully calculates the model parameters under two different dynamic loadings. In both cases,
ECM battery parameter estimation under DST cycle.
ECM battery parameter estimation under HPPC cycle.
Calculated parameters are then fed to the SoC estimation algorithm. The estimation of
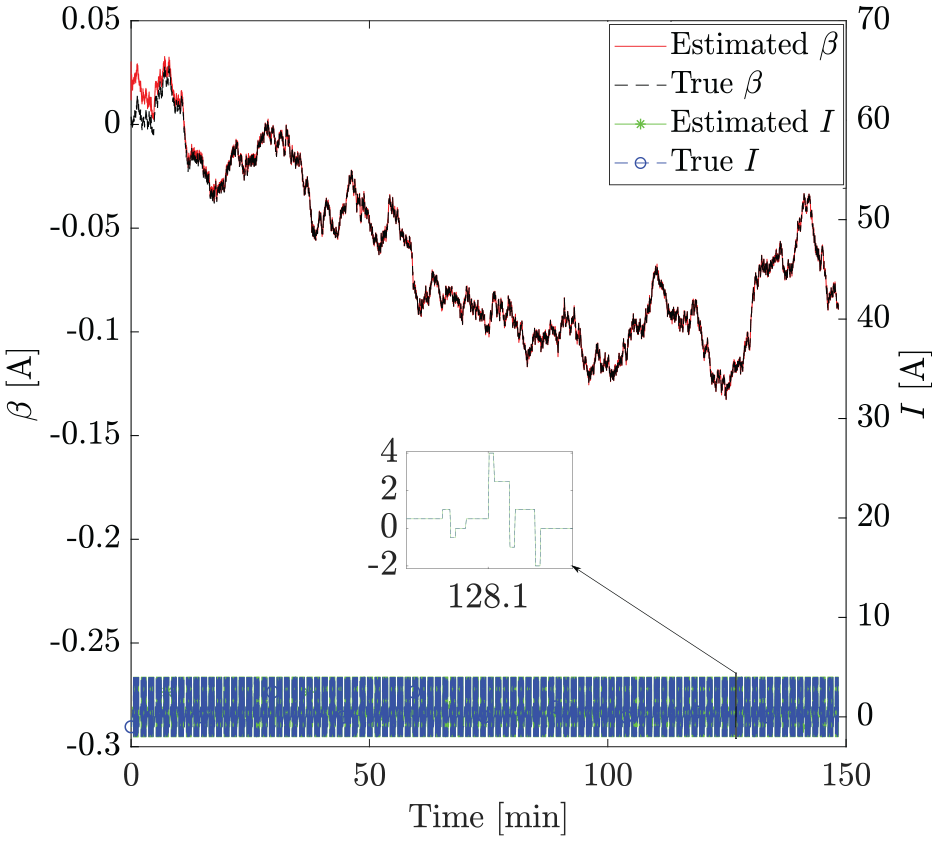
Bias estimation results under DST cycle.

Bias estimation results under HPPC cycle.
The results show that the proposed algorithm can estimate
Figures 7 and 8 show the SoC estimation under the measured current input and the corrected current input along with the current input estimations. The mean absolute error (MAE), root mean square error (RMSE) and maximum percentage error (MAXE) of the SoC estimation are used to quantify the performance of the proposed algorithm. The MAXE in SoC estimation is reduced from around 11.3% to 0.56% under the HPPC cycle. It is decreased from 7.2% to 0.78% under the DST cycle. The battery experiment is also conducted to validate the proposed algorithm.
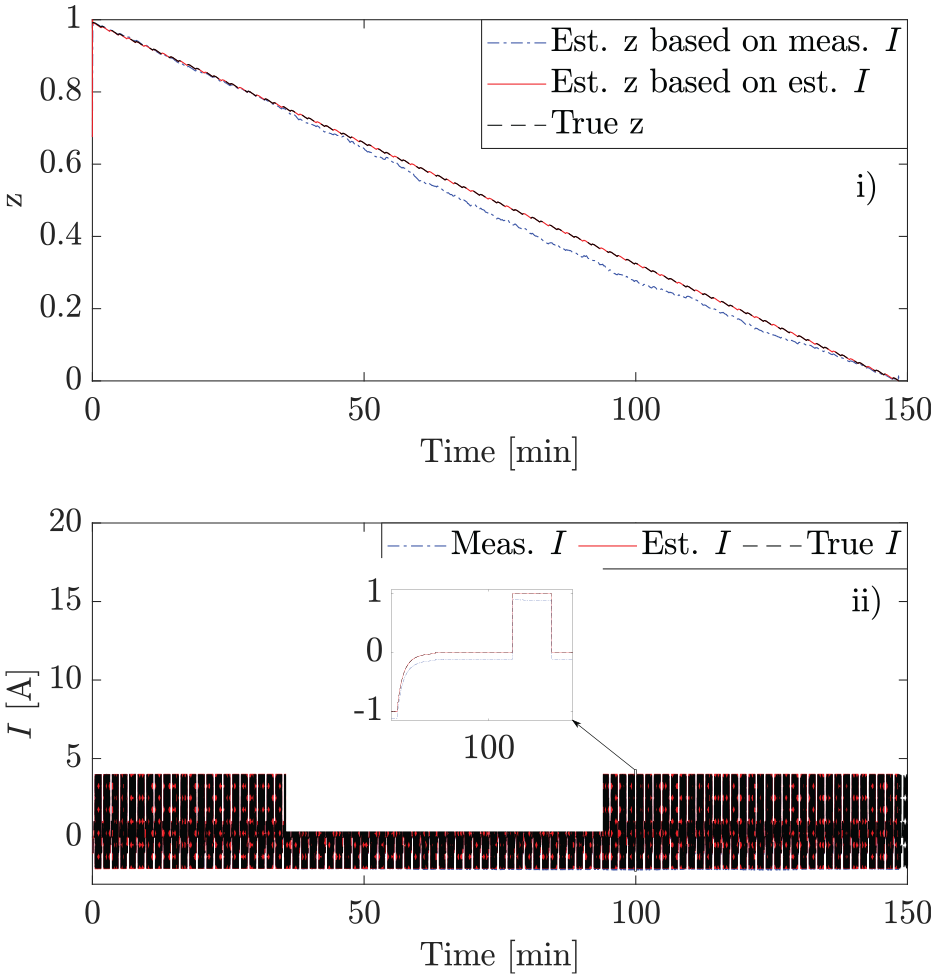
SoC and I estimation results under DST cycle: (i) SoC estimation results and (ii) current measurement correction result.
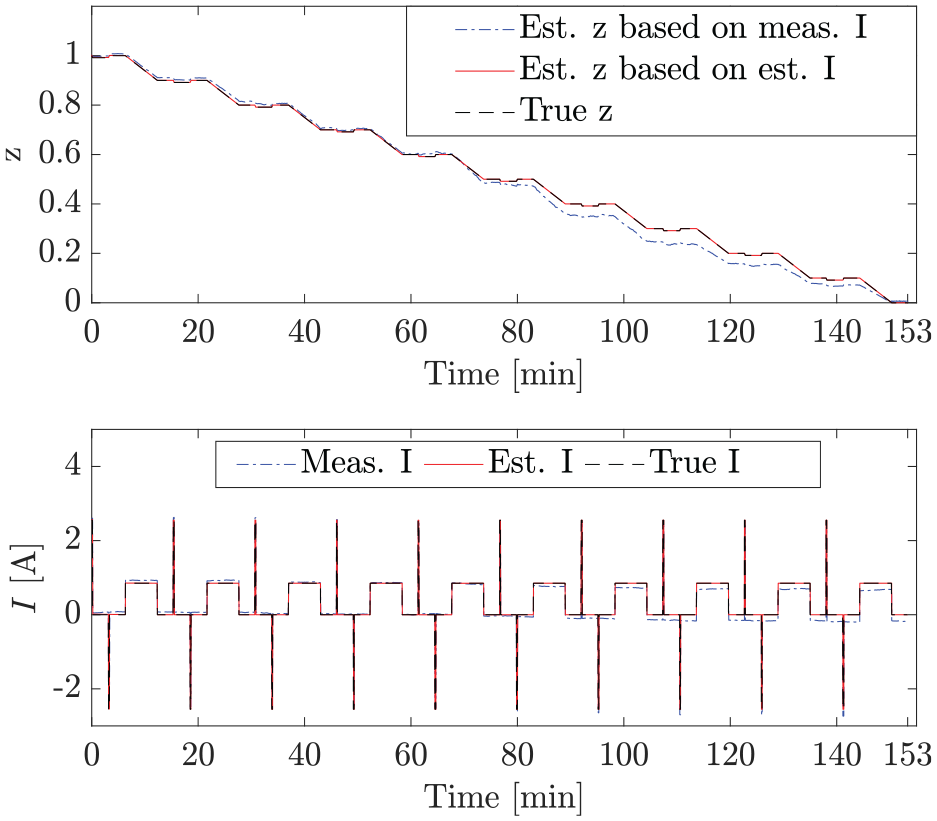
SoC and I estimation results under HPPC cycle: (i) SoC estimation results and (ii) current measurement correction result.
Figure 9 demonstrates
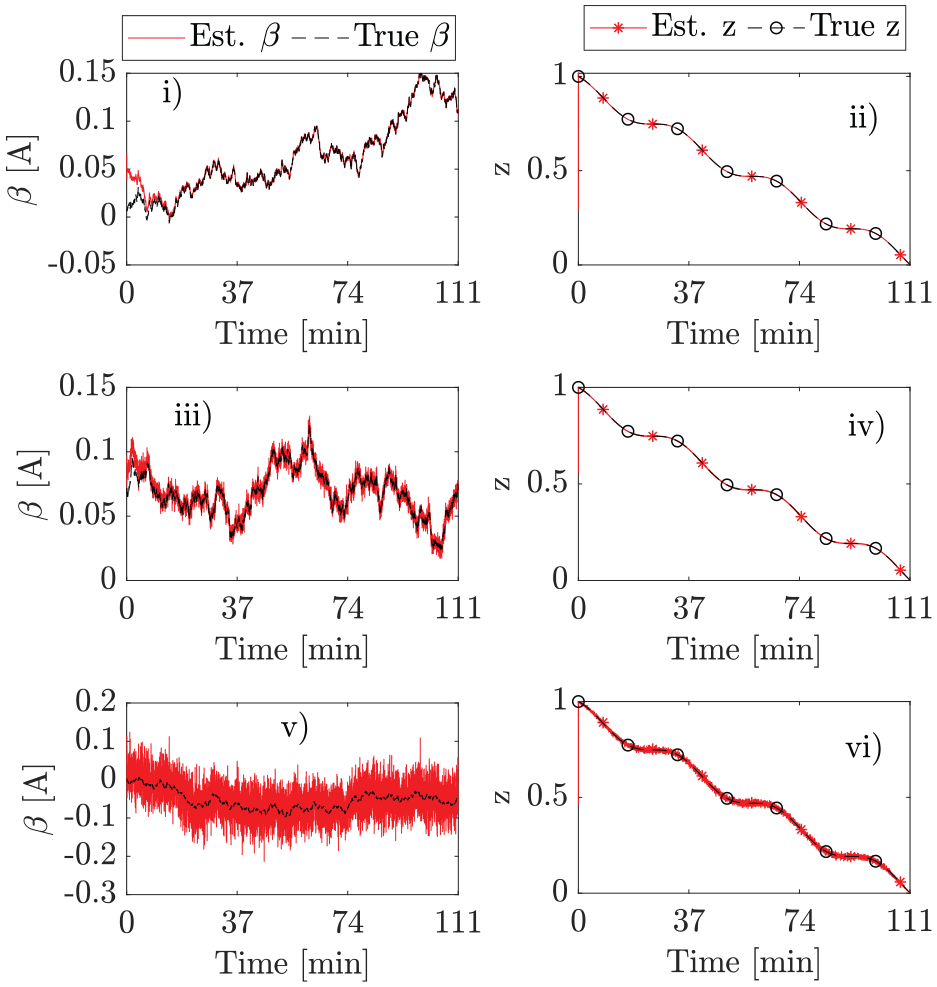
Figure 10 shows the parameter estimation based on the battery experimental data. The parameters converge to their values fast.
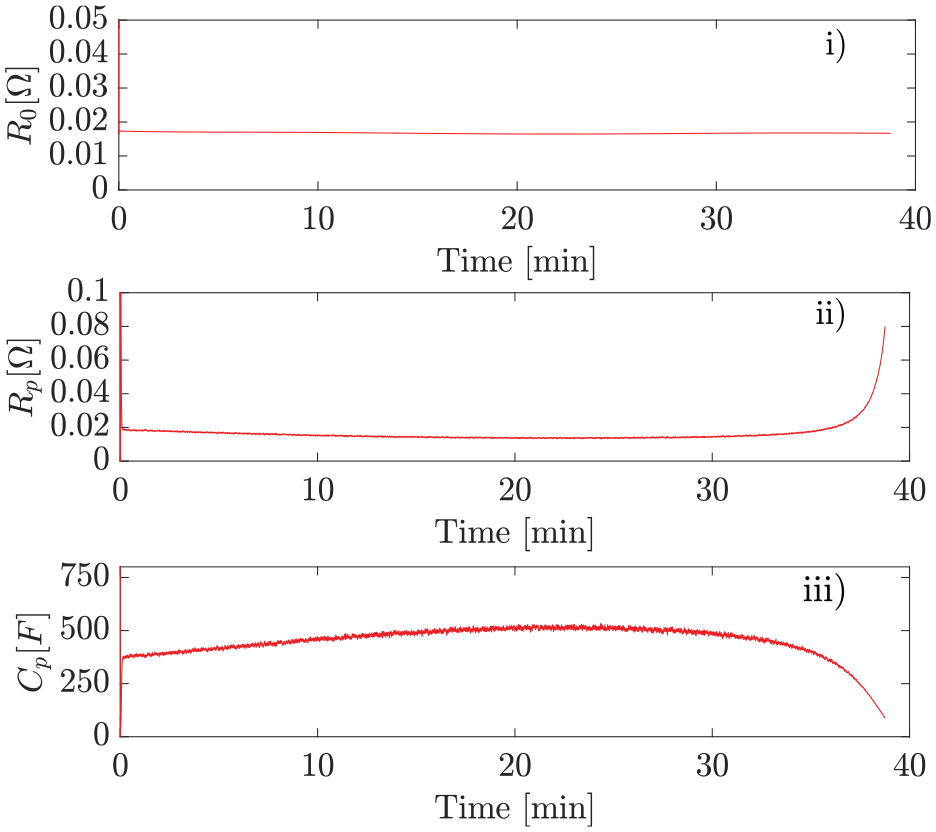
Parameter estimation results by experiment.
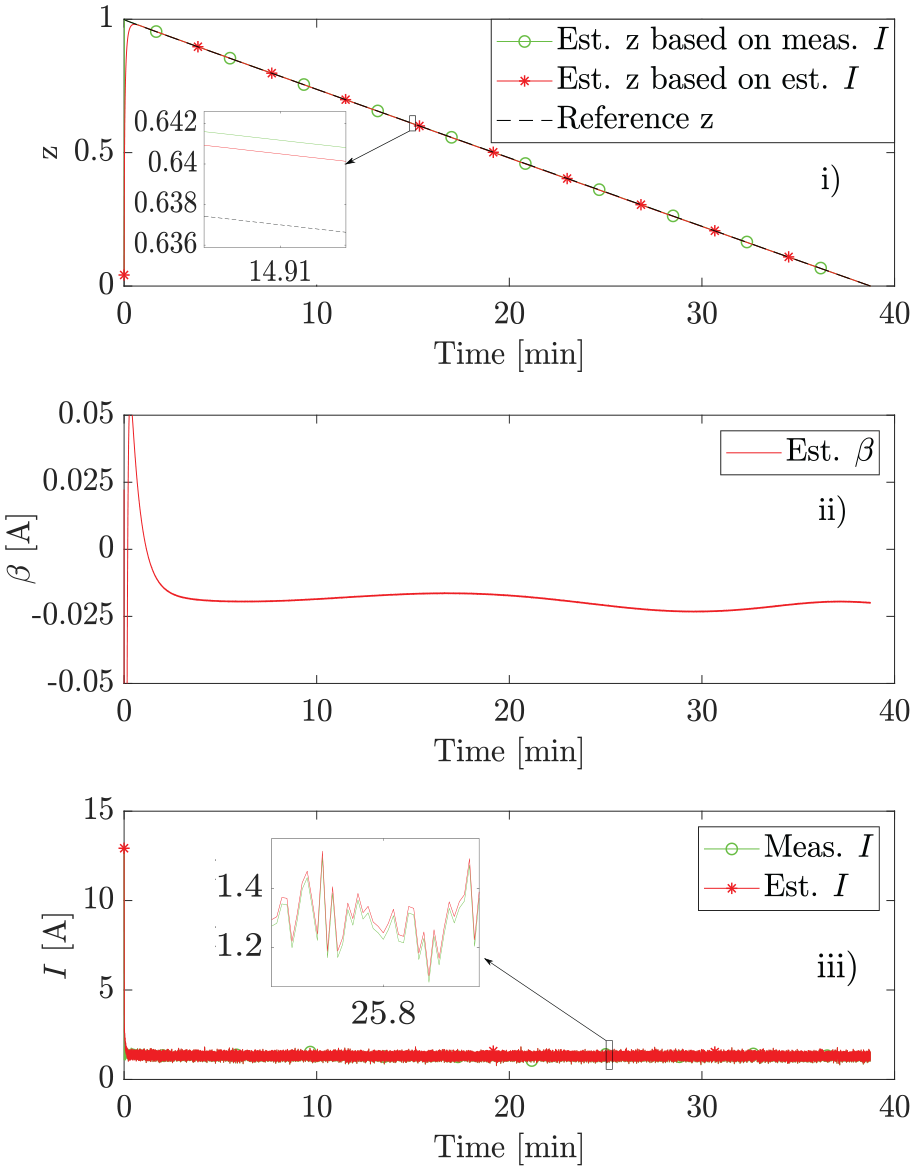
SoC estimation results by experiment.
Summary of SoC estimation errors according to measured current and estimated current.
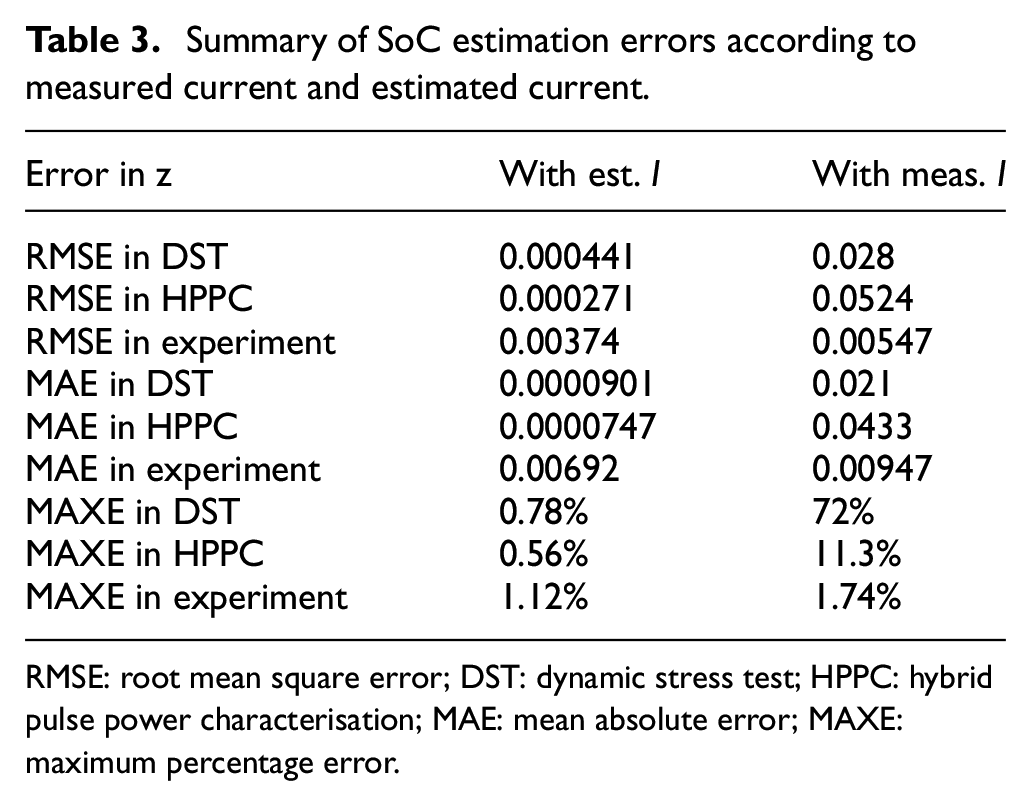
RMSE: root mean square error; DST: dynamic stress test; HPPC: hybrid pulse power characterisation; MAE: mean absolute error; MAXE: maximum percentage error.
Conclusion and future work
The corrupted current sensor measurements, variations in the operational conditions and battery depredation are inevitable in battery-powered applications. Unlike the majority of the SoC estimation algorithms in the literature, the current measurement is corrupted by two stochastic noises in practice. This deteriorates the SoC estimation accuracy, resulting in shorter battery pack life or passenger safety risks due to overcharging/overdischarging. This study proposes an online SoC estimation algorithm that mitigates the input current measurement noise. The method significantly reduces the SoC estimation error and increases the reliability of the BMS. The battery model parameters are estimated online using an adaptive law-based parameter estimation algorithm. The input current measurement is modelled by considering the following two noises: the zero-mean white noise
The future work will investigate the accuracy of
Footnotes
Acknowledgements
The authors thank the Republic of Türkiye Ministry of National Education for funding support for the first author’s PhD at the University of Leeds.
Authors’ contributions
O.K. made a contribution in algorithm design and implementation, performed the computer simulation and battery experiment, and participated in writing original draft, review and editing. J.K. made a contribution in algorithm design, review, editing and supervision.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.
Data availability
Data available on request from the authors.