
Abstract
The cooperative output regulation problem for heterogeneous multi-agent systems under sensor and actuator attacks with an adaptive self-triggering strategy is considered in this article. The attack considered is the false data injection attack. To resolve the system, a dynamic internal model is introduced for each agent, and a distributed adaptive self-triggering control scheme is proposed. The results show that intermittent communication is possible for all agents using the proposed control mechanism and no agent shows Zeno behavior. The adaptive controller is used to guarantee that the regulated output for the heterogeneous multi-agent systemss is achieved with cooperative uniform ultimate boundedness under both actuator and sensor attacks. Given the whole state of information is unavailable, the adaptive dynamic system is designed based on receivable compromised or uncompromised output information. The effectiveness of the given control scheme is illustrated by two examples.
Introduction
Over the last few decades, research on the cooperative output regulation (COR) of multi-agent systems (MASs) has undergone extensive development.1–5 Various tasks, such as underwater vehicles, spacecraft formation flying, satellite attitude control, and manipulator manipulation, require collaborative control of MASs. The primary objective of COR is to provide a control scheme that facilitates disturbance rejection and trajectory tracking. In recent years, several notable advancements have been made in this field.6–10 Nevertheless, the majority of these studies have assumed the proper functioning of both the actuators’ security and the complete communication topology of each agent. In reality, cyber-physical attacks on sensors and actuators of MASs pose potential threats.
Consider the scenario where a microprocessor is embedded within an MAS to handle data acquisition and communication control of the drive. If the sensor network is attacked, the sensor data may be destroyed, and false actuator inputs or misleading data can significantly impact system performance, hindering the achievement of system-level tasks. Therefore, it is crucial to address attacks on sensors and actuators of MASs in cyber-physical systems.11–16 Asymptotic stability can be guaranteed in networked MASs when external disturbances are uniformly ultimately bounded. Numerous studies have been carried out regarding systems suffering from external attacks. Specifically, a novel distributed adaptive control structure was developed 15 to ensure asymptotic stabilization of closed-loop dynamic systems. Dogan et al. 17 proposed a framework for control synthesis, which provides stability guarantees for linear time-invariant MASs with uncertainties in the system. Xu and Haddad 18 developed a novel control architecture that addresses the problem of networked MASs affected by random external disturbances in the event of damaged actuators and sensors. Moreover, the framework also addressed actuator attacks, and the proposed adaptive scheme guarantees uniform ultimate boundedness (UUB) of the state tracking error. Recently, Hu et al. 16 investigated the estimation problems under fake data injection attacks, while Gusrialdi et al. 19 proposed a resilient control method for cooperative systems that were attacked from outside. Mustafa and Modares 20 conducted a rigorous analysis of the adverse effects of attacks on MASs and proposed a mitigation method against sensor and actuator attacks. In addition, optimal denial-of-service (DoS) attacks scheduled with energy constraints were analyzed21,22; however, the studies focused on how to damage the performance of the system, and no consensus analysis was given. To address this issue, Lu and Yang 23 presented a distributed control design for MAS, which showed the possibility of achieving consensus under DoS attacks. Jin et al. 24 employed an adaptive control scheme that guaranteed the UUB of the closed-loop system to address sensor and actuator attacks among cyber-physical systems. Meng et al. 25 proposed a novel adaptive controller with leader-following consensus through cooperative UUB for a heterogeneous MAS affected by sensor and actuator attacks. As a result, it is interesting to study the COR in the case of sensor networks under attack.
The existing results of attacks on the sensors and actuators of MAS in cyber-physical systems mostly consider continuous communication, which often leads to significant resource consumption. However, many application scenarios involve agents with limited computing and energy resources. To minimize energy consumption, event-triggered control, an intermittent communication mechanism, has gained widespread attention in this context.26–37 Recently, researchers proposed distributed event-triggered control strategies for solving consensus problems among both heterogeneous and homogeneous linear MASs.33,34 In addition, Tan et al. 36 proposed a distributed event-triggered impulsive control method in which the actuator only executes the control input at event-triggering impulsive instants. However, limited results are addressing the COR problem of MAS by adaptive self-triggering mechanisms under sensor and actuator attacks.
From the review of the existing literature, this article faces two main challenges. First, most of the studies above focus on homogeneous MASs under network attacks. However, this article examines heterogeneous MASs under sensor and actuator attacks, which presents a challenge since agents do not necessarily have the same dynamics. In addition, intermittent communication between devices and actuators is necessary due to limited power resources. Based on the study of Cheng and Ugrinovskii, 29 event-triggering mechanisms can be effective in both engineering and theory to overcome this challenge. As a result, an adaptive self-triggered scheme has been designed.
Inspired by the aforementioned works, the main contributions are summarized as follows: (1) compared with the work by Meng et al., 25 where continuous communication among each heterogeneous agent is required, to avoid the limitations of continuous communication, this article presents a novel adaptive self-triggered scheme for heterogeneous MASs under attacks; thus, the communication is intermittent, the continuous communication can be avoided, and the communication loads of the whole systems can be reduced. Furthermore, Zeno behavior is excluded. (2) A novel adaptive observer is designed to obtain the system state information of each agent. This problem is usually encountered in practical applications but rarely considered in existing researches.17,18 Besides, the state information of each heterogeneous agent can be accurately estimated by the observer even under sensor and actuator attacks, as well as with external disturbances in cyber-physical systems. (3) The points including heterogeneity, antagonistic interactions, external disturbances, attacks, observer-based control, and adaptive self-triggered scheme are given in the meantime. The existing results consider a part of points but not all points.
Notations
Problem formulation
Graph theory
Suppose
Problem statement
Initially, we give a linear MAS with N heterogeneous agents. For each agent i, its dynamics can be determined as follows

where

where

where

where
Remark 1. It can be seen that faults on sensors and actuators are modeled in the same way as in equations (3) and (4). The fact is that as in the work by Meng et al., 25 faults and attacks have qualitatively different characteristics. Faults have random and unintentional consequences, while attacks mislead or cripple the entire network by intentional injection. Faults with random characteristics are easier to detect and mitigate. This is a simplified description of the motivation of the model.
Definition 1. The output
In the case of cyber attacks, the COR performance may be seriously affected. The comprised dynamics can be described as follows

Before we proceed, consider the following standard assumptions and lemmas.
Assumption 1. Attacks of both sensor and actuator
Assumption 2. Graph
Assumption 3.
Assumption 4. The matrix pairs
Assumption 5. The matrix
Remark 2. Assumptions 2–5 are standard and necessary conditions for solving OR problems for MASs with linear dynamics.4–9 The matrix pair
Lemma 1 (Young’s inequality). Suppose that there exist two positive real numbers
Lemma 2. Suppose that
Main results
In this section, a novel adaptive resilient control protocol is introduced for the considered heterogeneous MASs under the sensor and actuator attacks with a self-triggering mechanism. The COR problem for heterogeneous MASs will be achieved with cooperative UUB.
Control law design
The adaptive resilient control protocol is designed as follows


where


where
Remark 3. Assumptions 1–2 are required. It is worth mentioning that the state
Lemma 3. According to Assumptions 2–5, the matrix
Theorem 1. Assumptions 1–5 are considered hold, the gain matrix K is defined as

Then, an adaptive self-triggering mechanism is introduced as follows

where

The next triggering time instant
Proof. Define

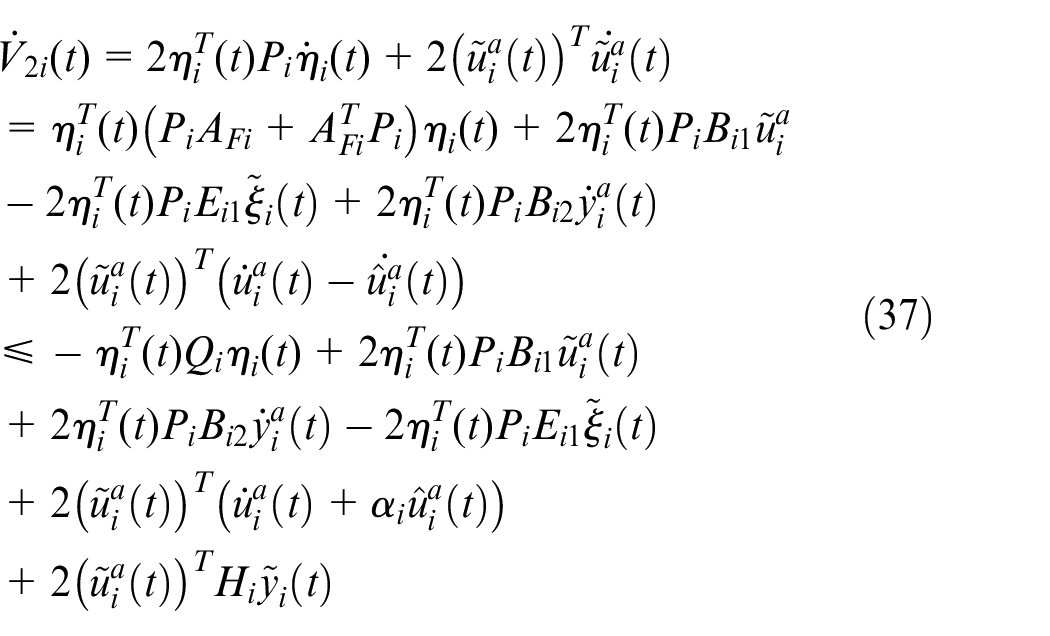
For closed-loop system (14), we consider a Lyapunov candidate as follows

where
Consider the matrix M is symmetric and positive definite, then, according to Lemmas 1 and 2, we can obtain the following inequality

By substituting equation (17) into equation (16), one has
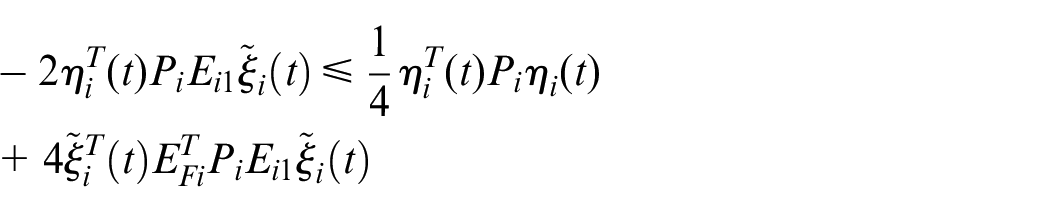
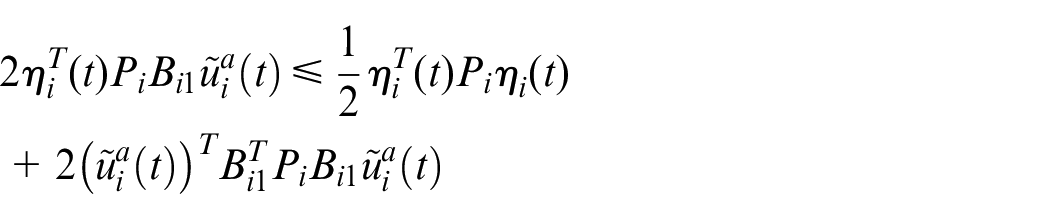
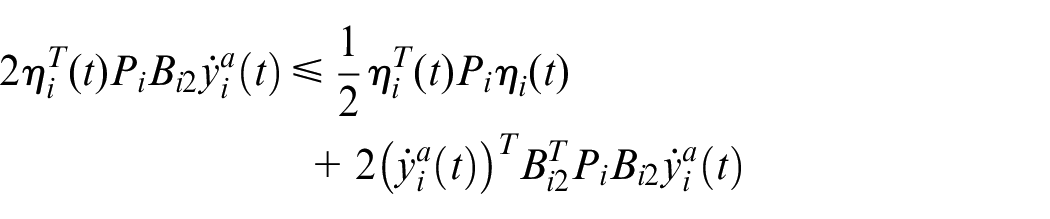
Based on Lemmas 1 and 2, the following inequality is given as

Next, consider the self-triggering condition
On account of Lemma 3, the matrix M is symmetric. Thus, an orthogonal matrix U exists and enables
where

In light of LaSalle’s invariance principle,
The upper right-hand derivative
where

We consider the following two cases to indicate that a minimum triggering time
Case 1:
Case 2:

Considering equation (25) and self-triggering condition (12), one has

As for Zeno behavior, it means that there are an infinite number of triggering instants in a finite time.27,37 Based on the self-triggering algorithm, the minimum triggering time
Then, the self-triggering algorithm will be presented. The upper right derivative

Note that
Inspired by Hu et al., the following condition is considered as

We propose an iterative algorithm for agent i to compute the next triggering time instant

Rewrite the above iterative algorithm in the following form

where the initial condition can be set as
Remark 4. On account of the self-triggering algorithm, when the instant time
Consider the defined equations


Let

where
Theorem 2. Consider the COR problem of MAS under sensor and actuator attacks. Assuming that Assumptions 1–5 hold, the resilient adaptive control scheme is given in equations (6)–(10), and the self-triggering condition is satisfied. Then,
Proof. Considering
The formula is equivalent to

Since

Suppose Assumptions 1–5 hold, the appropriate controller gains
Choose a Lyapunov function as

Deriving the above equation yields
Using Lemma 2, one obtains
and
Combining the above inequalities, we get
Next,

where
In light of the comparison lemma, 25 and it follows from equation (39) that

Due to
Remark 5.
Theorem 3. Suppose Assumptions 1–5 hold, self-triggering condition (12) is satisfied. Let


Proof. As analyzed in Theorem 1, for any initial condition,
The derivative of

Choose the Lyapunov function as

where

for
According to Lemma 2, one has
As analyzed previously, the following inequalities are obtained



Then, the ultimate equation is obtained as follows

where
Similar to the proof of Theorem 2, there exists a positive number
Theorem 4. Suppose Assumptions 1–5 hold, under the distributed control protocol and the triggering mechanism, the heterogeneous MASs (1) uniformly ultimately bounded.
Proof. According to the proposed equation
Therefore, for any
Remark 6. Based on Theorem 4 and Meng et al., 25 the output regulation with cooperative UUB is independent of the upper number of the compromised agent, as long as the communication topology satisfies Assumption 2.
Remark 7. From the proof presented throughout this section, the designed adaptive controller still applies if there is only a constant sensor attack, once the following terms
Illustrative examples
In this section, two examples, including a numerical example and an application to a spacecraft formation flying problem, are given to validate the effectiveness of the proposed self-triggered schemes.
Example 1
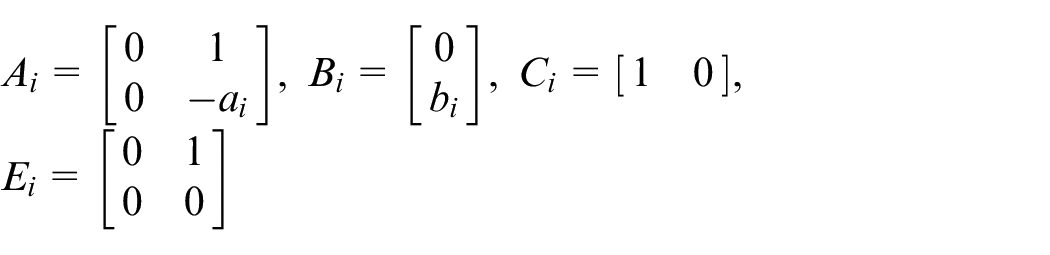
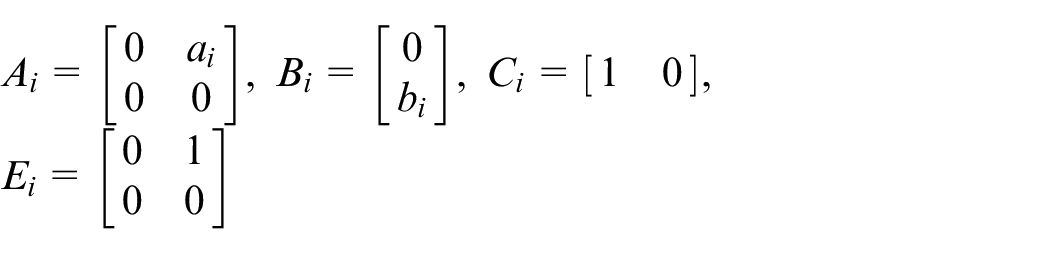
A graph composed of seven heterogeneous agents is considered, as shown in Figure 1. The dynamic characteristics of each agent can be expressed as follows
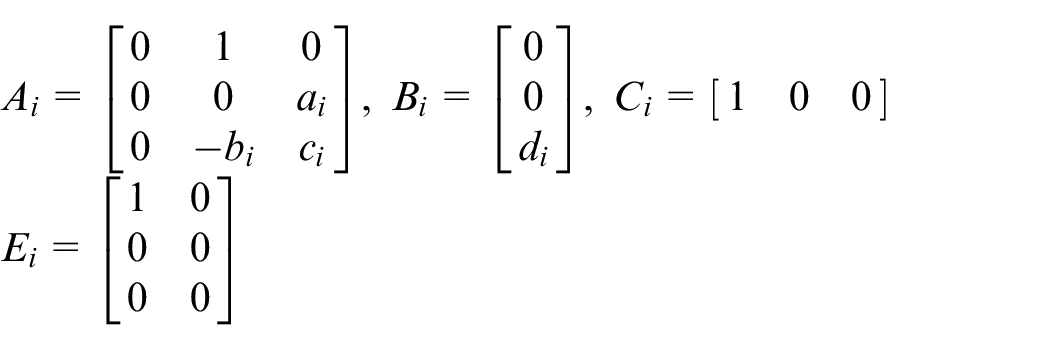
The parameters
Assign
The parameters
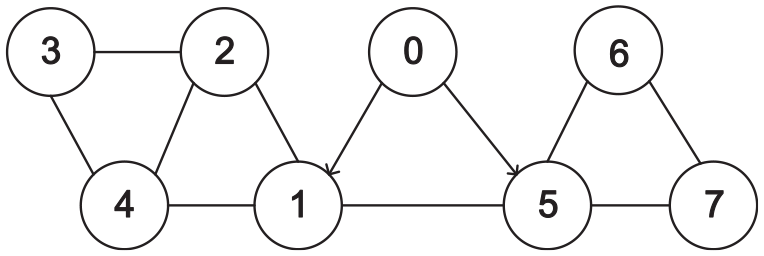
The communication topology among heterogeneous MASs.
Furthermore, according to the design procedure,
The other consensus gains,
The variable

The adaptive coupling gains are defined as
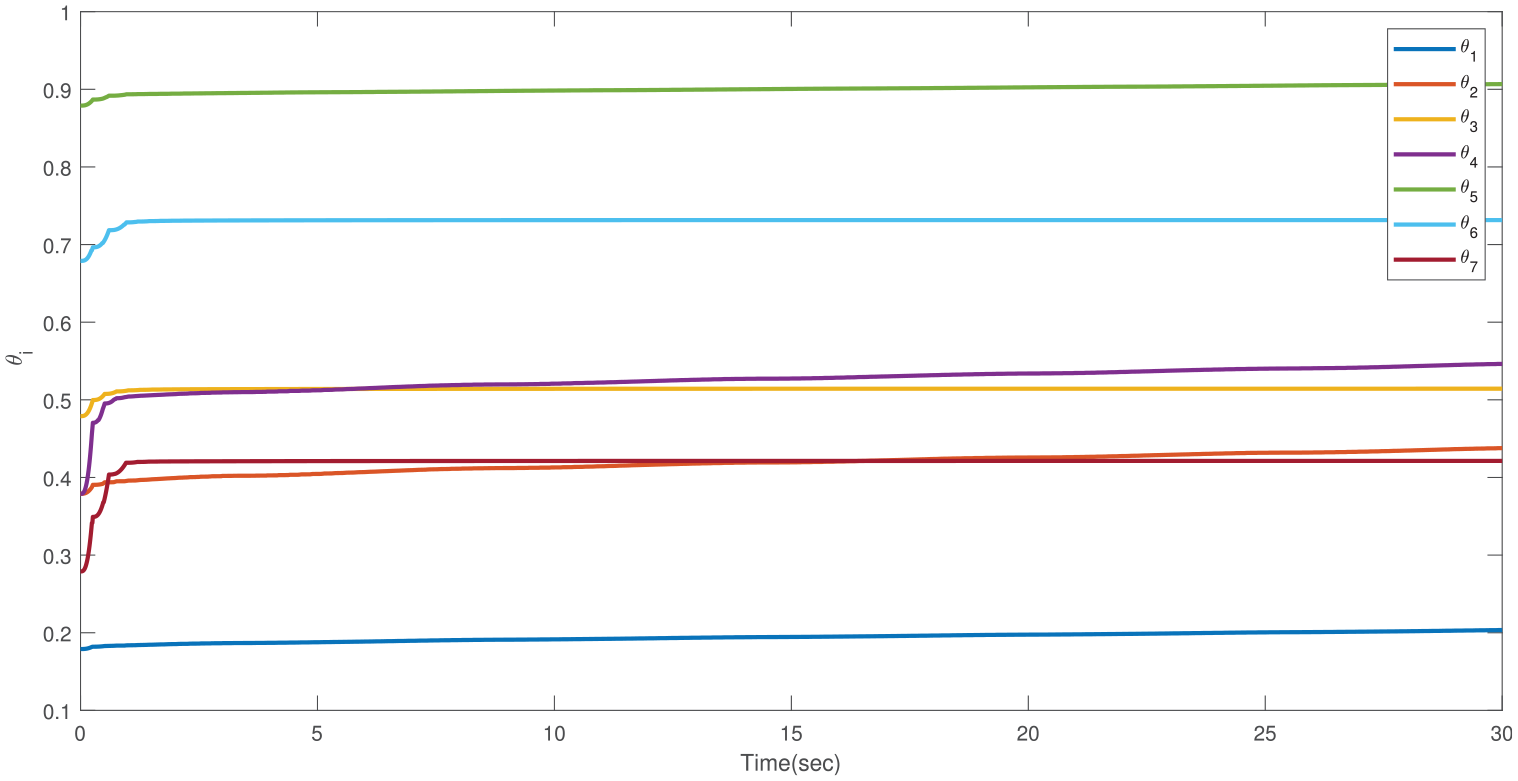
The adaptive coupling gains
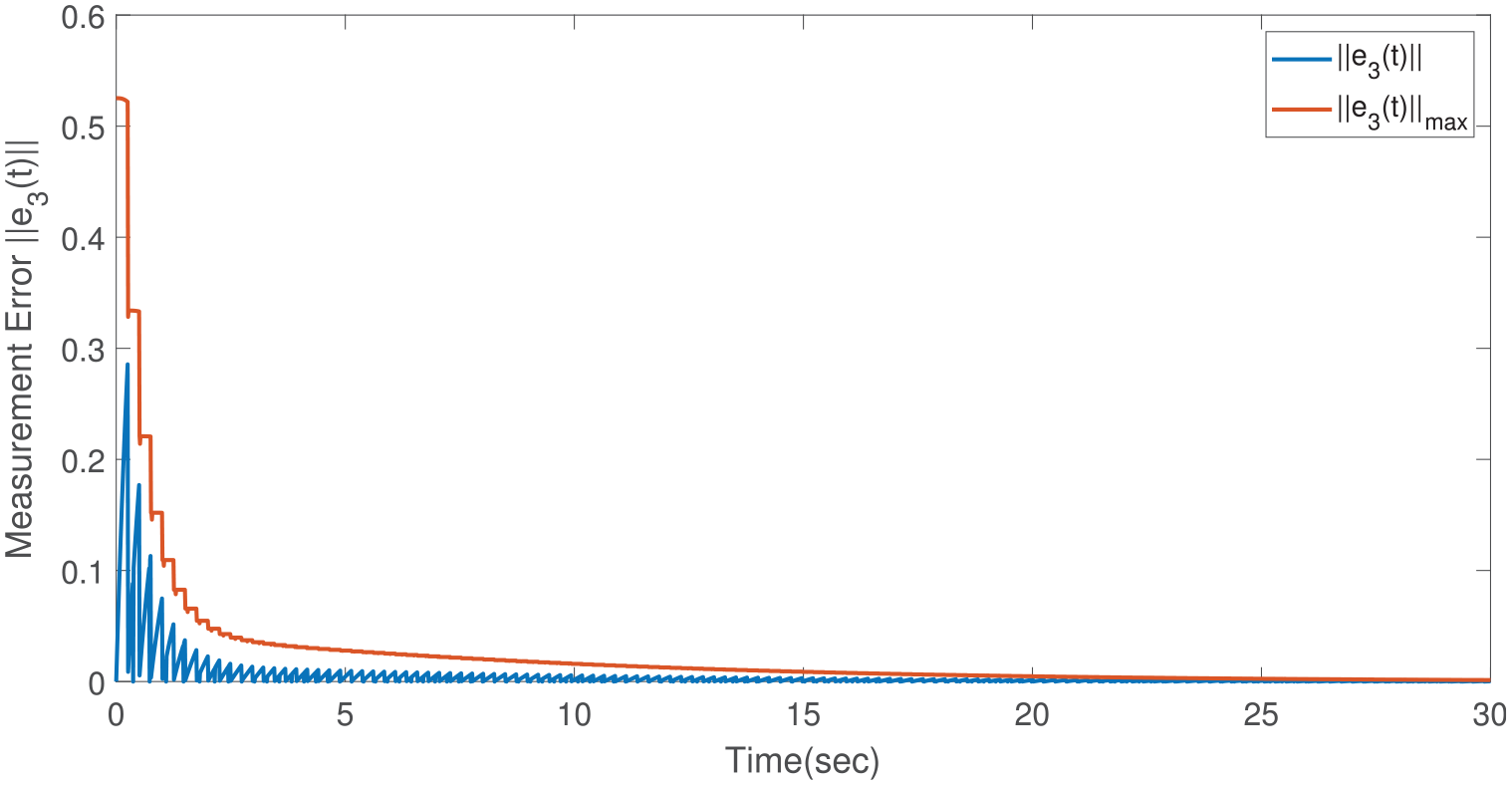
The evolution of
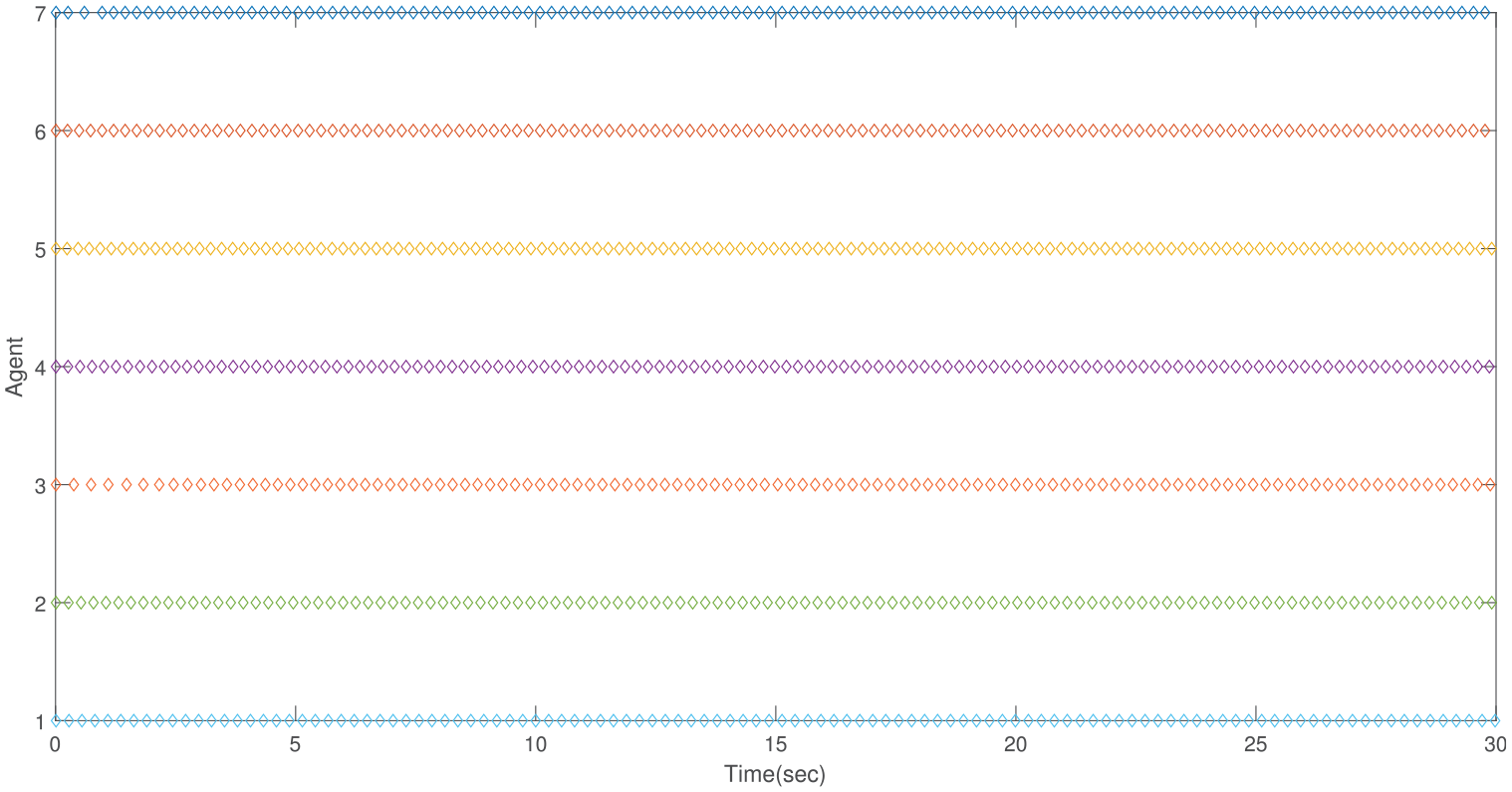
The triggering instants of each agent.
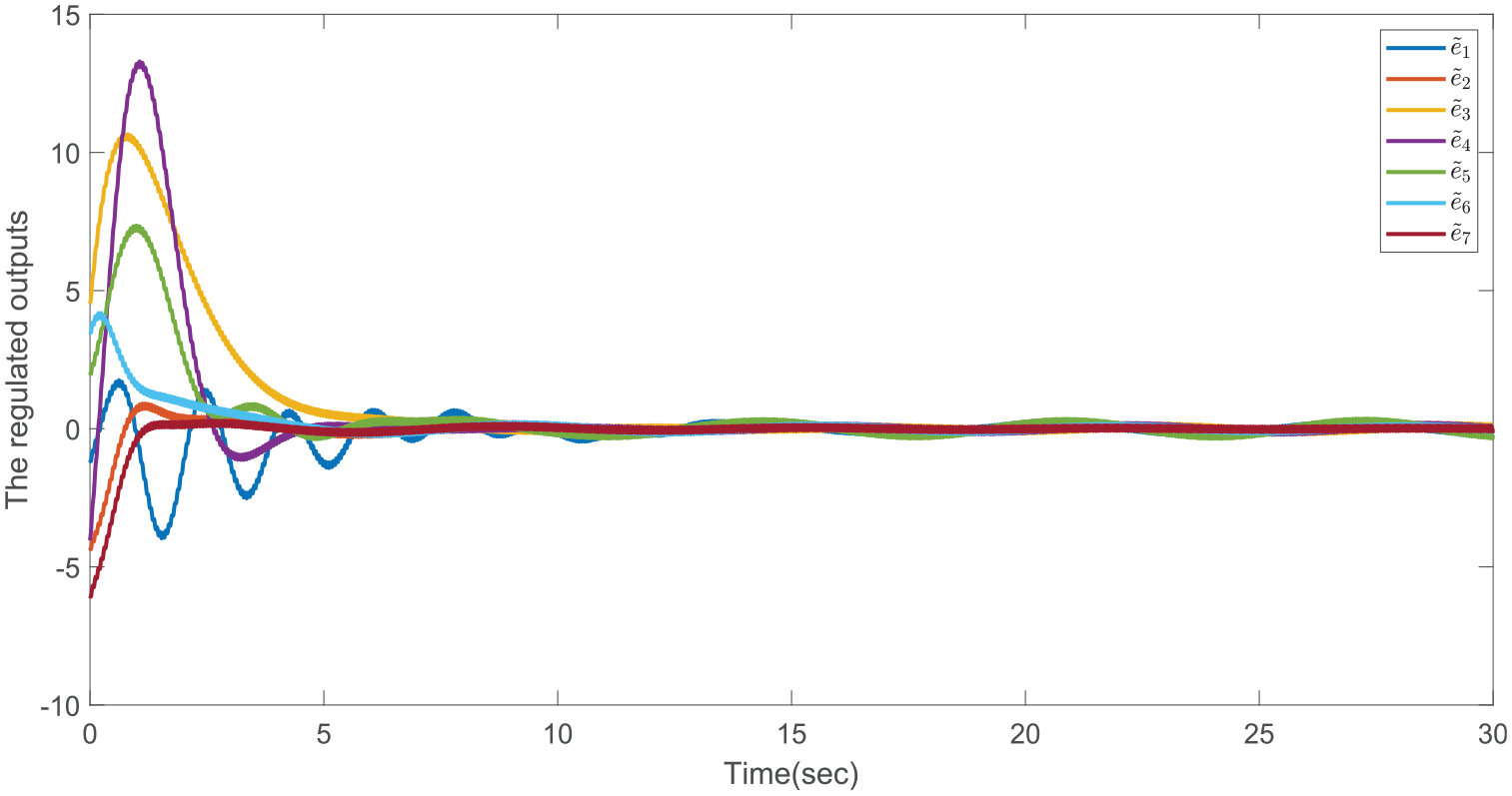
The evolution of regulated output
Example 2: application to a spacecraft formation flying problem in the low Earth orbit
In this example, the proposed adaptive self-triggering control scheme approach is illustrated to be equally applicable to solve the formation flight problem of a spacecraft in low Earth orbit. A related work is referred by Hu et al., 37 which addresses the formation consensus problem for spacecraft in low Earth orbit under event-triggered and self-triggered algorithms.
Consider a virtual reference spacecraft moving in a circular orbit of radius

where
Let
Denote

where
To illustrate the effectiveness of the method proposed in this article to solve a practical engineering problem, a scenario is considered where the formation flight model has five satellites, and the communication topology is shown in Figure 6, similar to Figure 1.
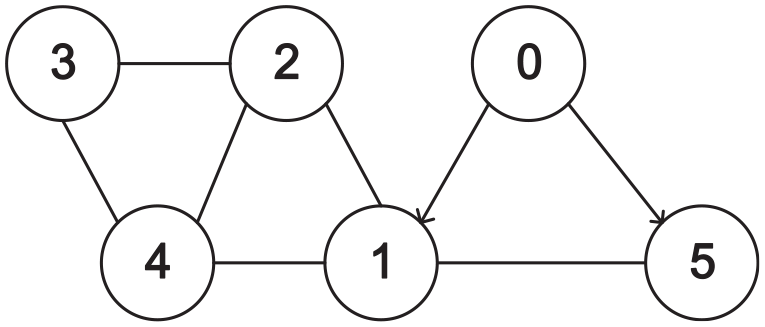
The communication topology among five satellites.
Define the satellite position error as
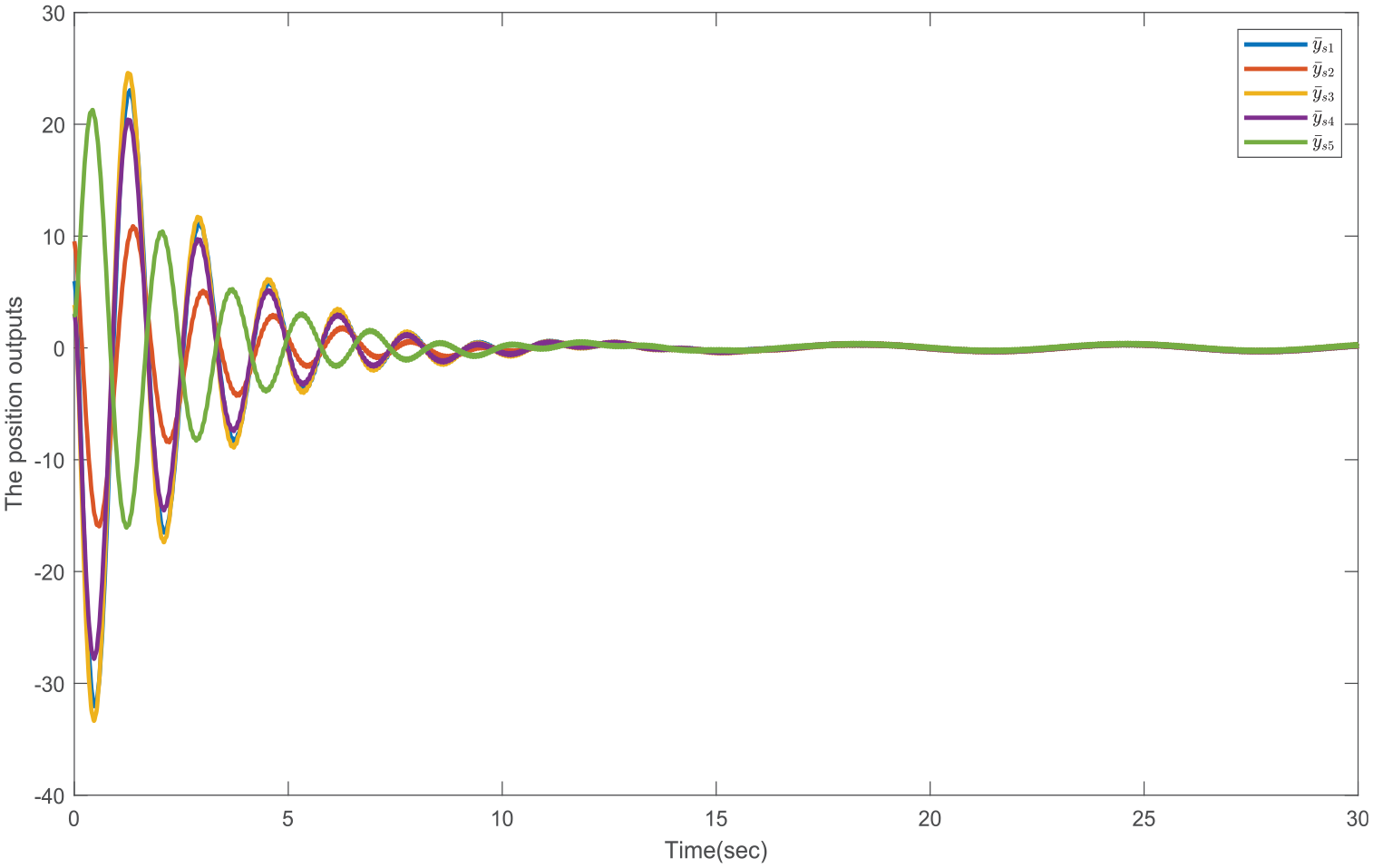
The position outputs via the self-triggered control scheme on the y-axis.
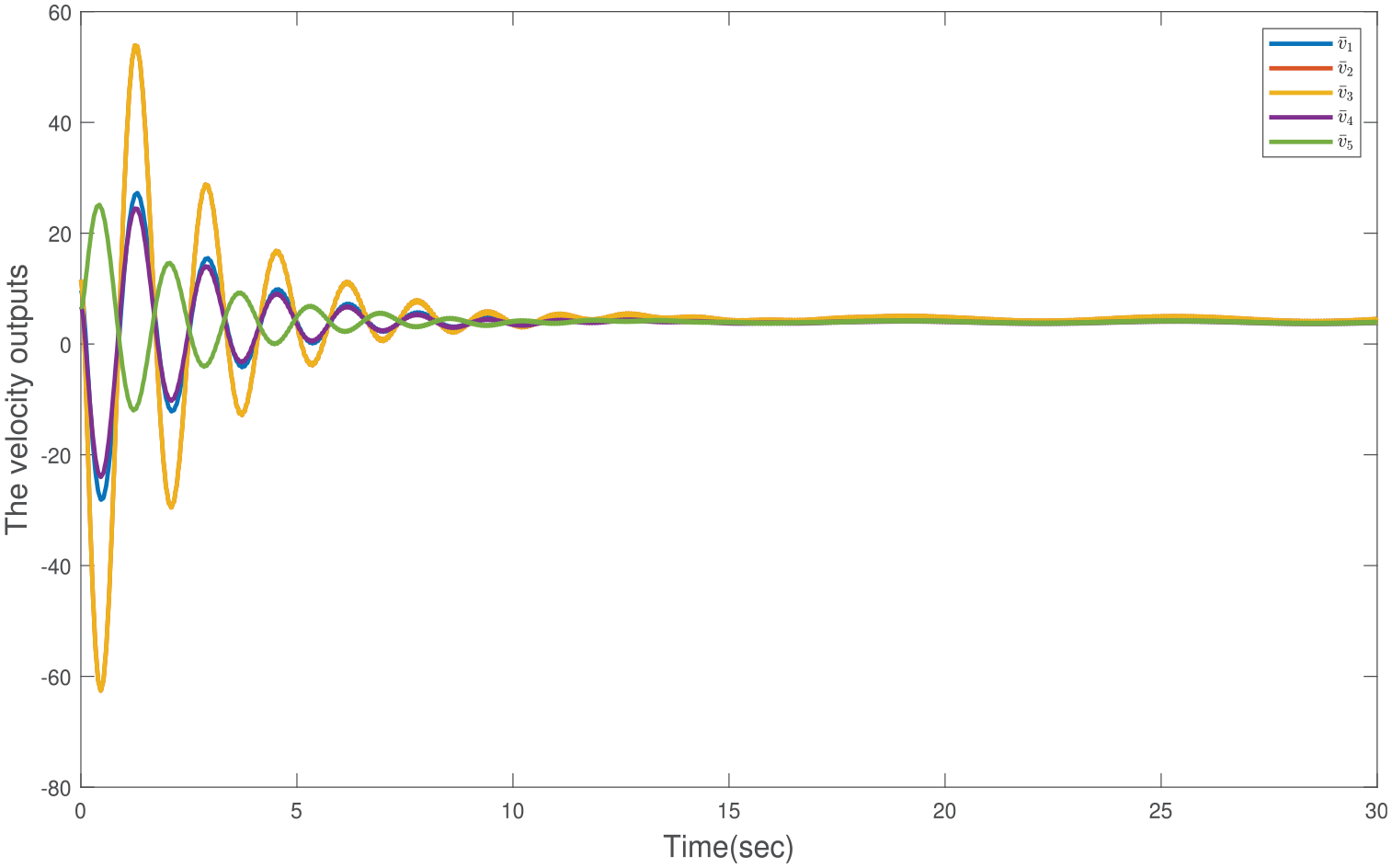
The velocity outputs via the self-triggered control scheme on the y-axis.
Conclusion
This article has addressed the COR problem for heterogeneous linear MASs with fixed graphs under sensor and actuator attacks through an adaptive self-triggered control approach. A dynamic internal model has been introduced for each agent, and an adaptive self-triggered control approach has been given. The results have shown that the regulated output for the heterogeneous MASs could be achieved with cooperative UUB and no agent would show Zeno behavior. In addition, the proposed method would be applied to engineering examples as well. Future research topics could be oriented to systems with switching topologies or time-varying delays.
Footnotes
Acknowledgements
The authors are grateful for the valuable comments and suggestions of the anonymous reviewers who provided the review.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.