
Abstract
This paper studies the output regulation problem of time-varying descriptor systems and the problem of designing state feedback and dynamic measurement output feedback control laws which asymptotically achieves output regulation and disturbance rejection is considered. New regulator equations are proposed for time-varying descriptor systems in the form of differential-algebraic matrix equations. The unique solution of the proposed regulator equations is given as well. We prove that the output regulation problem of time-varying descriptor systems is solvable if and only if the given regulator equations are solvable. Based on the solution of the regulator equations, the state feedback and dynamic measurement output feedback control laws are designed to solve the output regulation problem. The work extends the existing results of output regulation problem for time-varying linear systems to the time-varying descriptor systems. Numerical examples are given to show the effectiveness of our methodology.
Keywords
Introduction
The output regulation problem is an essential topic in control theory. It aims to achieve asymptotic tracking of the reference input and/or reject a class of exogenous disturbances while maintaining the internal stability of the closed-loop system. 1 This problem arises from many control problems in practice, such as cruise control of automobiles, aircraft taking-off and landing, manipulation of robot arms, orbiting of satellites, motor speed regulation, and so on. 1 It is shown in Francis 2 that studies the linear output regulation problem, and proposes that the solvability of a linear output regulation problem is equivalent to that of the given regulator equations of the associated linear time-invariant (LTI) system has a solution. In 1976, scholars invented the internal model principle to study the robust linear output regulation problem. In particular, a dynamic compensator called internal model is designed by using the internal model principle. The robust linear output regulation problem of uncertain linear time-invariant systems is transformed into the stabilization problem of augmented systems composed of original systems and internal models. Since then, scholars have been trying to extend the output regulation problem to various cases.3–10 The perfect regulation problem under measurement output feedback is presented in Chen et al., 3 and a necessary and sufficient condition is derived. In Isidori et al., 4 the linear output regulation problem subject to input saturation is studied, where the sinusoidal or constant exogenous signals are considered. It is shown in Marino and Tomei 5 that considers the case of the exosystem has unknown parameters and known order, and a dynamic output feedback control law is designed to achieve the object of output regulation problem based on the proposed adaptive internal model. Hu and Lin 6 considers the output regulation problem of linear systems subject to control constraint which is described by a compact convex set. In Chen and Huang, 7 the global robust output regulation problem for a class of nonlinear systems in output feedback form has been studied which assumes that the solution of the regulator equations is polynomial. It is shown in Zhang and Serrani 8 that the output regulation problem of linear time-varying systems is studied. The regulator equations is given in the form of differential matrix equations. The output regulation problem of linear time-delay systems and the robust output regulation problem of linear time-delay systems are considered in Lu 9 and Huang, 10 respectively.
Descriptor systems arise in many aspects of our daily life such as cruise control of aircraft landing and taking-off, power systems, orbiting of satellites, motor speed regulation, and so forth. Since the late 1970s, descriptor systems have attracted the attention of many researchers. 11 They have studied the stability, solvability, controllability and observability, pole assignment, and other related problems of descriptor systems.12–15 Descriptor systems are often used to describe systems with algebraic constraints on state variables. Therefore, it is of practical importance to study the ability to track targets and cope with disturbances for descriptor time-varying systems subject to external disturbances. It is shown in Lin and Dai 16 that the output regulation problem of descriptor linear systems is studied, the regulator equations corresponding to the output regulation problem of descriptor linear systems is proposed. It is proved that the output regulation problem is solvable if and only if the corresponding regulator equations is solvable. In Ji and Huang, 17 the necessary and sufficient conditions for the output regulation problem of descriptor nonlinear systems are given by using a generalized version of the center manifold theorem. Chen and Huang 18 considers the robust output regulation problem for a class of descriptor nonlinear systems which contain uncertain parameters. It requires the solution of the regulator equations be a polynomial of the exogenous signal. The problems of semiglobal stabilization and output regulation of descriptor linear systems subject to input saturation is considered in Lan and Huang. 19 It is shown in Wang and Huang 20 that a normal output feedback control law is designed to solve the output regulation problem of descriptor nonlinear systems without the normalizability assumption. In Pang et al., 21 the robust output regulation of descriptor nonlinear systems is solved via a nonlinear internal model. It is shown that the polynomial assumption in Chen and Huang 18 can be replaced by a much milder condition. A new condition is proposed which can be applied to a larger class of non-polynomial nonlinear systems. It is shown in Jafari and Binazadeh 22 that the robust output regulation of discrete-time singular systems with actuator saturation and uncertainties is solved by using composite nonlinear feedback control.
This paper considers the problem of output regulation for time-varying descriptor systems. It is of significance to study time-varying descriptor systems. The problem of controlling a mobile robot moving on an uneven surface can be formulated as stabilizing a time-varying system.23,24 Generally, there are two methods to solve this problem, internal model method and regulator equation method, respectively. The major difference between the internal model method and the regulator equation method is that the former is usually used to solve output regulation problems in which the system contains uncertainty.7–10,16–18 The system studied in this paper does not contain uncertainty. Therefore, the regulator equation method is used to solve the output regulation problem of the time-varying descriptor systems. In this paper, new regulator equations are proposed for time-varying descriptor systems in the form of differential-algebraic matrix equations. The unique solution of the proposed regulator equations is given as well. We prove that the output regulation problem of time-varying descriptor systems is solvable if and only if the given regulator equations are solvable. In the stability analysis of the time-varying descriptor system, we extend the method in 1 for stability analysis to make the studied closed-loop system stable. Based on the given regulation equations and the conclusions of the stability analysis, the sufficient and necessary conditions for solving the output regulation problem of the time-varying descriptor system are given. The specific design methods of the state feedback controller and the dynamically measured output feedback controller were finally obtained, which expanded the research scope of the output regulation problem.
The contributions of this paper are as follows:
New regulator equations corresponding to the output regulation problem of time-varying descriptor systems are proposed in the form of differential-algebraic matrix equations. The unique solution of the new regulator equations is given in the Appendix as well which is used in the control design.
The state feedback and the dynamic measurement output feedback control are considered. We extend the results of output regulation problem from linear time-varying systems and descriptor systems to time-varying descriptor systems.
Problem formulation and preliminaries
Consider the following time-varying descriptor system:
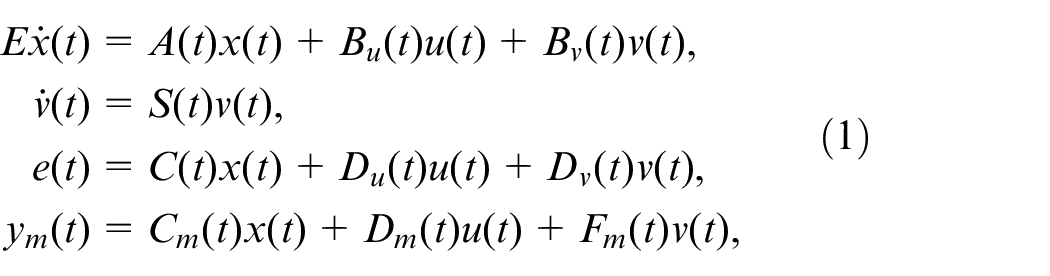
where
In the following, we introduce the definitions of uniform regularity and the impulse-freeness for time-varying descriptor systems.

Condition (2) guarantees the unique solution of system (1). In this paper, we assume that system (1) is uniformly regular and impulse-free.
Now, we introduce an equivalent transformation of time-varying descriptor systems. Consider the time-varying descriptor system as follow:

There always exist two invertible matrices
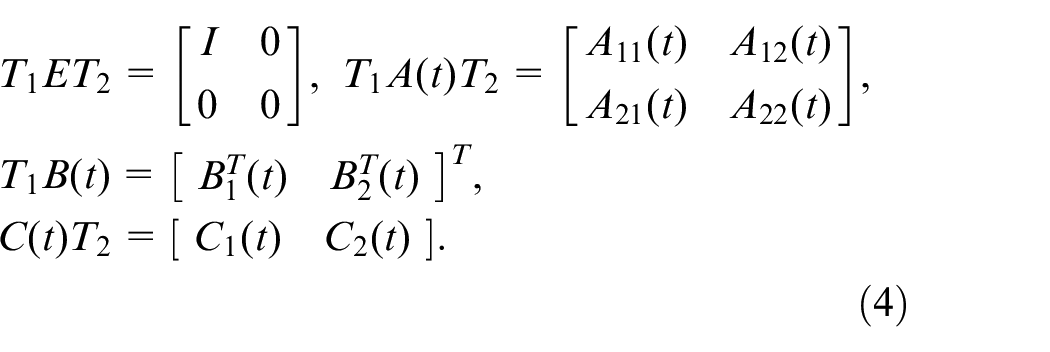
By taking linear coordinate transformation
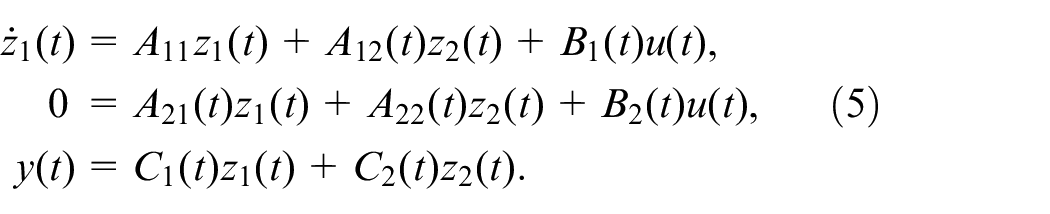
Clearly, system (3) and system (5) are equivalent, which implies that system (3) is uniformly regular and impulse-free if and only if system (5) is uniformly regular and impulse-free. It can be easily verified that system (3) is impulse-free if and only if
We consider two classes of feedback control law in this paper.
State feedback control law:

where
2. Dynamic measurement output feedback control law:

where
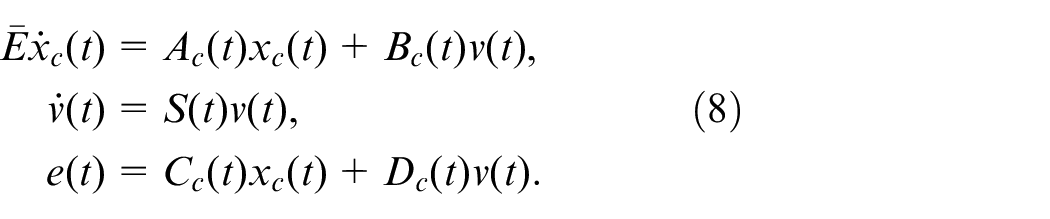
By combining control law (6) or (7) with (1), we can get the closed-loop system as follow:
In the case of state feedback, let
In the case of dynamic measurement output feedback, let
Our object is to choose appropriate
To solve the output regulation problem of the system (1), we need the following assumptions:
Main result
This section presents the solutions to the output regulation problem via state feedback and dynamic measurement output feedback.
Solution of output regulation via state feedback
Next, we present a necessity and sufficiency condition, which is the output regulation problem via state feedback is solvable if and only if the given regulator equations are solvable.


where

Let
by the definition of
Since the pair
Note that the output regulation problem is solved, i.e.,
Since all the matrices are bounded and continuous, then we have


Due to

where
Because of the asymptotic stability of the pair
Then the condition (12) implies the following condition:

Solution of output regulation via dynamic measurement output feedback
Next, we present the necessity and sufficiency condition of the output regulation problem via dynamic measurement output feedback. Before giving the main theorem of this subsection, a technical lemma is given which will be used to proof the main result of this subsection.
(i) Output regulation problem of the system (1) can be solved via dynamic measurement output feedback control law
(ii) There exists a matrix
where
(iii) There exists matrices
and

where


where
which is the same as:
Let
Now, we present the necessity and sufficiency condition of the output regulation problem via dynamic measurement output feedback.


where

According to the proof in the necessity part of Theorem 1, it can be easily known that there exsit bounded continuous matrices
It can be easily obtained that


By defining

Under Assumption 3, that is

is detectable, there exists a bounded and continuous matrix

is asymptotically stable. Because the informations of
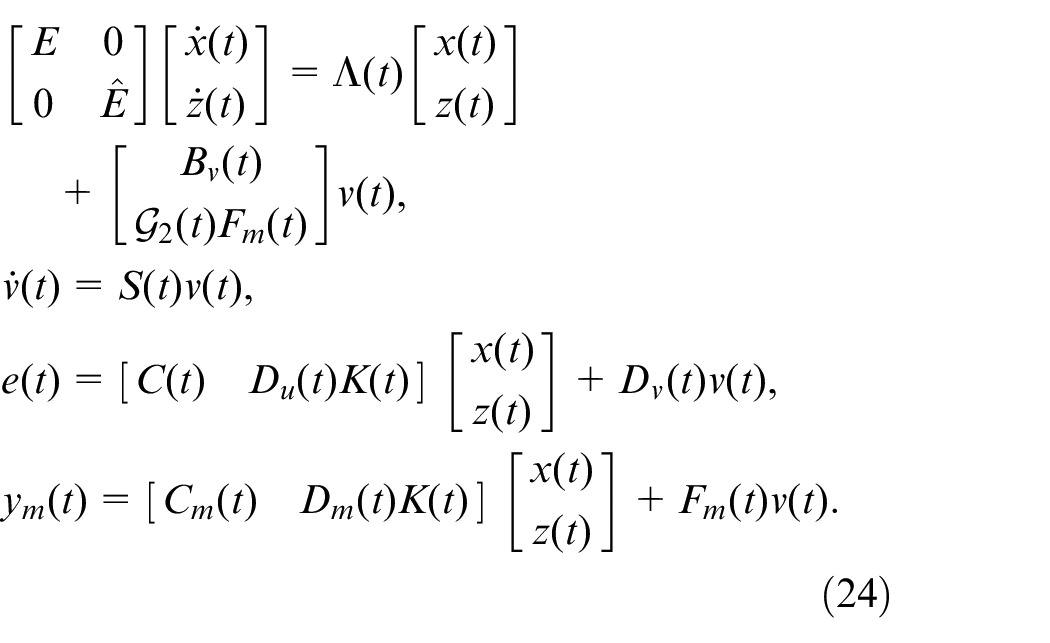
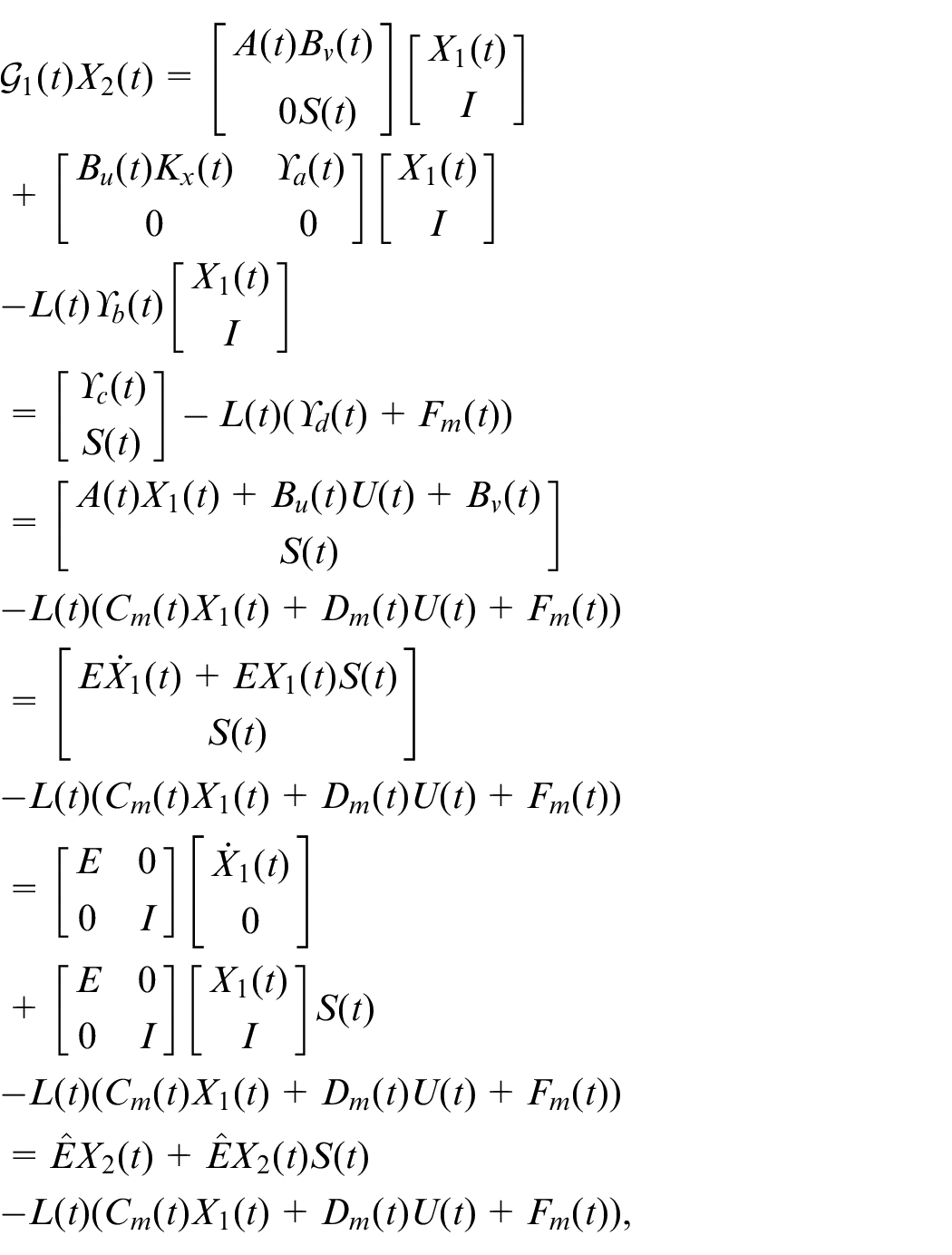
Define
Then,
where
After appropriate elementary transformation, (29) becomes
where
Because the pairs

are stable,where

Then the closed-loop system (24) is stable (see Wang
29
), that is, Property 1 is satisfied. Now we show that Property 2 is satisfied. Define
where
We proved that
A numerical example
In this section, we employ two numerical examples to verify the effectiveness of Theorem 1 and Theorem 2 proposed in this paper. Firstly, consider output regulation problem of the following time-varying descriptor system:
where


The reference signal to be tracked is

We choose feedback gain as follows:

The initial states of the original system and the exogenous system are given as
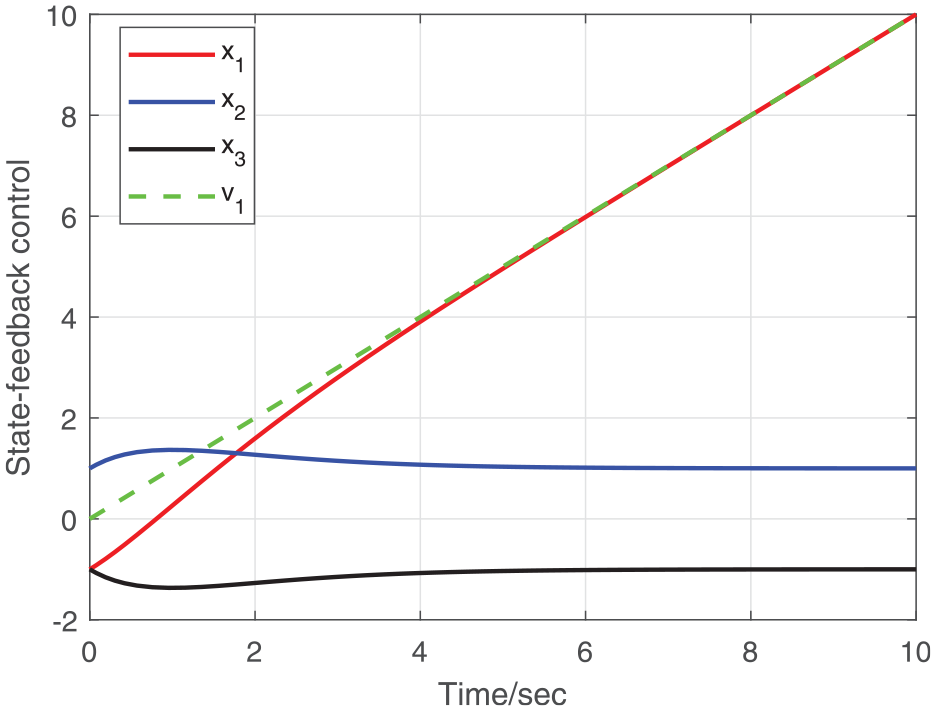
The states and the reference signal.
Next, the output regulation problem of the system (30) via dynamic measurement output feedback is considered, where



The reference signal to be tracked is
We choose the feedback gain and the observer gain as follow:
The simulation results with
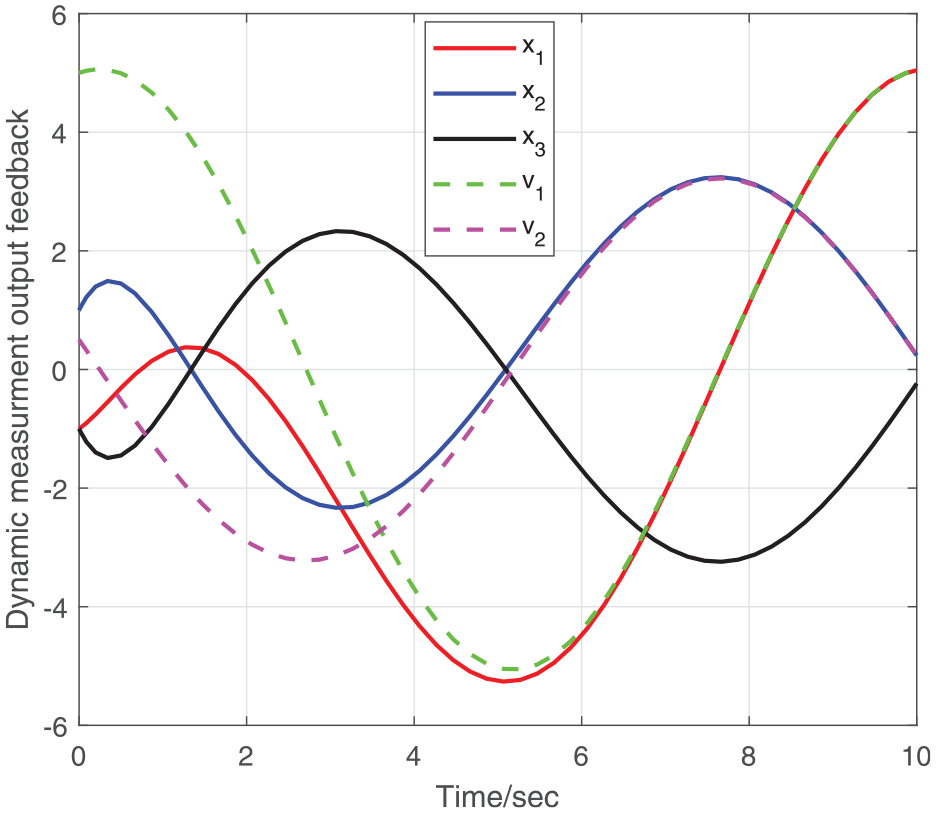
The states and the reference signals.
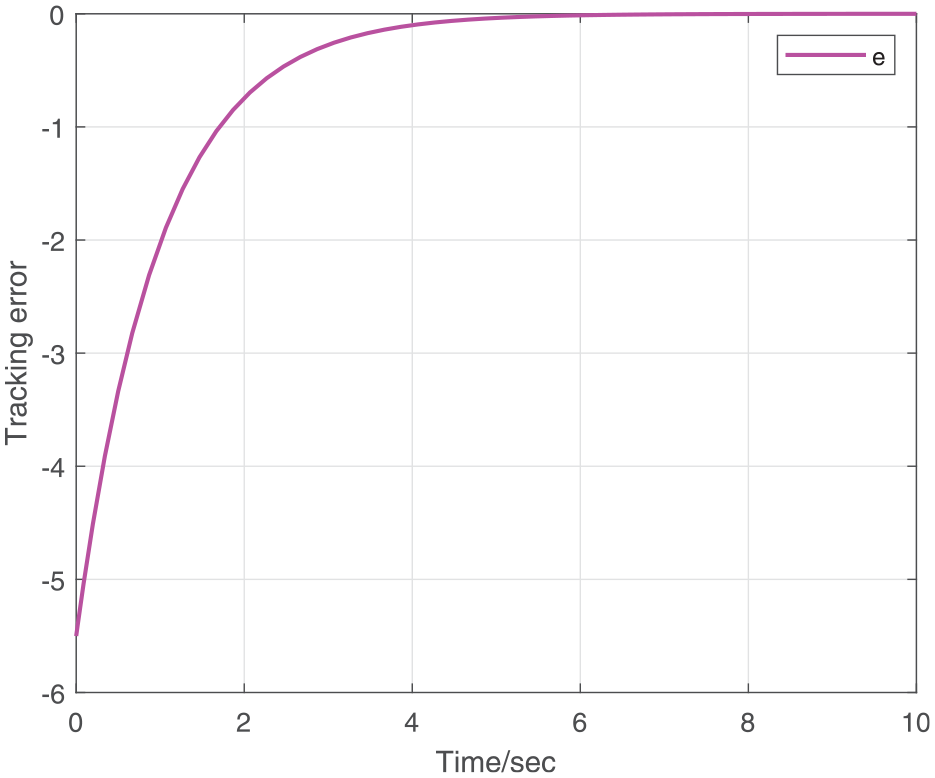
The tracking error signal.
The simulation results verified the effectiveness of our methodology.
Conclusions
In this paper, the output regulation problem of time-varying descriptor systems is studied. The state feedback control and dynamic measurement output feedback control are considered. New regulator equations and its unique solution are given for the output regulation problem of time-varying descriptor systems. The necessary and sufficient conditions for solving the output regulation problem (using regulator equations) are presented. In the future, we will consider the robust output regulation problem of time-varying descriptor systems by using the internal model principle, where the exosystem is time-varying.
Footnotes
Appendix
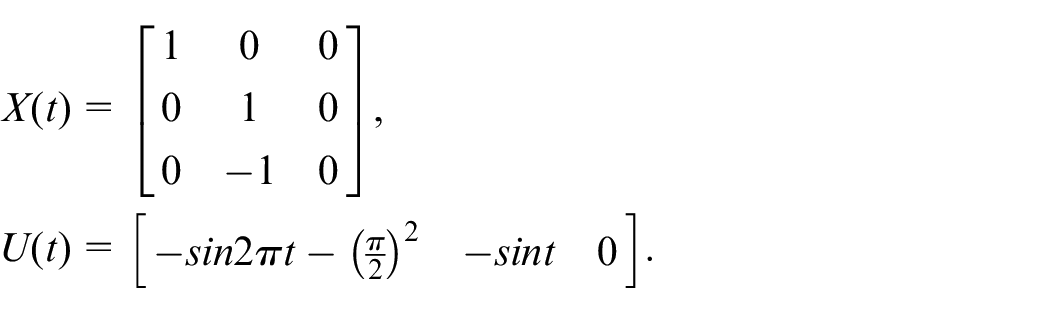
In this section, the unique solution of the following differential-algebraic matrix equation is proposed,
By using the equivalent transformation of the time-varying descriptor system defined in (4), there exist invertible matrices
(A.1) is transformed into the following equation:
where
It is obvious that system (1) is uniformly regular and impulse-free if and only if equations (A.1) and (A.3) are uniformly regular and impulse-free. Due to the invertibility of
The following technical lemma plays a vital role in proving the main result.
which is given by
where
According to the fundamental theory of the ordinary differential equation, the matrix equation (A.10) has a unique solution. By the impulse-free property of the system (1),
Substituting (A.12) into (A.10), we have
According to Lemma 2.1 in Wang
29
and Theorem 1 in Pinzoni,
28
where
Then we have
By the definitions of
Acknowledgements
The authors are grateful to the editor and anonymous reviewers for their valuable suggestions that helped in improving the initial version of the manuscript. The authors would like to express their appreciation to the referees for their helpful comments and suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Project supported by the National Natural Science Foundation of China under Grant (No.61074005) and the Talent Project of the High Education of Liaoning Province (LR2012005).