This article studies robust stabilization and adaptive control problems for a class of continuous-time nonlinear singular systems by static output feedback. First, under sufficient conditions which the system is impulse controllable, the static output feedback controller is designed, and the stabilization problem of the system is discussed. Second, the and adaptive controllers are designed for the continuous-time nonlinear singular systems with external disturbances. Compared with the existing conclusions, the controller can be designed for more nonlinear singular systems. Finally, an example of a nonlinear singular circuit is given, and the simulation results verify the validity of the proposed controllers.
Singular systems, which are also called generalized or implicit systems, are realistic representations of dynamic systems and can provide a more natural and convenient characterization for practical applications. They can be used to describe more systems characteristics and are widely used in power control systems, economic systems and other systems.1 In the past few decades, many research results are proposed for linear singular systems.2–6 Compared with linear singular systems, nonlinear singular systems (NSSs) can better reflect actual systems. Therefore, there are some works on NSSs in recent years.7–13 In Sun and Zhang7 and Liu et al.,8 the sliding mode controllers are, respectively, designed for a class of NSSs with partly unpredictable premise variables or with time-varying delay. The controller is designed for a class of discrete-time NSSs controlled through a communication network in Xu et al.9 based on the Lyapunov–Kravoskii stability theory. In Sun et al.,10 global asymptotic stabilization and control problems of a class of nonlinear Hamiltonian singular systems with input saturation and time-varying delay are studied. Based on the method of state non-decomposition, the control and adaptive robust control problems are, respectively, investigated for NSSs in Sun and Wang11 and NSSs with actuator saturation in Sun et al.12 In Li and Sun,13 the finite-time stabilization and finite-time robust stabilization of NSSs are studied by state non-decomposition method.
Because the state variables of the actual systems are sometimes not directly measured, the output feedback controller needs to be considered. The research on output feedback mainly includes static output feedback (SOF) and dynamic output feedback. One of the difficulties of dynamic output feedback is that the closed-loop system is very complicated, which can cause great trouble in practical applications. Therefore, a great deal of research achievements on SOF is proposed.6,14–20 The SOF control problem and robust control problem of continuous-time switching linear systems are studied in Carniato et al.14 with multi-vertex uncertainty via linear matrix inequality methods. In Bahreini and Zarei,15 the SOF stabilization problem in a positive linear systems with optimal -gain is studied, and an SOF controller is built to make the closed-loop system positive and asymptotically stable. An SOF adaptive control method is proposed in Zhai et al.16 for a linear systems with random sensor fault by automatically updating controller parameters. The robust SOF control problem is investigated for multi-subject uncertainty linear systems in Chang et al.17 In Belozyorov,18 an SOF controller is proposed for linear control systems via creating an initial approximation of the feedback matrix. For the linear singular systems, an SOF control strategy dependent on time delay is designed in Chen et al.6 for the linear singular systems with time delay. Because of the complexity of nonlinear systems, there are few works on SOF control of nonlinear systems.19–21 In Zhang et al.,19 a reliable SOF controller is considered for switched nonlinear systems with actuator faults by using the iterative linear matrix inequality method, and several sufficient conditions are given to ensure the existence of the SOF controller. The SOF stabilization problem of Lipschitz nonlinear systems is solved in Ekramian20 based on cone complementary linearization method. The stability and SOF stabilization problems are discussed for a class of nonlinear discrete-time singular switched systems in Wang et al.21 As far as the author knowledge, there are few results on SOF control problem of NSSs, except Wang et al.21
The important technology to solve the robust control problem of nonlinear systems is nonlinear control. In Liu et al.,22 a robust controller is designed for stochastic continuous time-delayed systems. The advantage of nonlinear control is that it utilizes the nonlinear characteristics of the system and has good control performance and strong robustness. The key of nonlinear control is to solve the Hamilton–Jacobi inequality.23 In recent years, the Hamiltonian function is widely studied and applied in practical control problems, and many effective controllers are designed in previous works.24–27 In general, there are two approaches to solve nonlinear control problems: one is based on Hamiltonian function method in Lu et al.24 and differential game theory in Soravia,28 and the other is based on the real bounded lemma developed in Chen and Nurdin29 and Haddad and Lanchares.30 Dissipation matrix approach is developed in Sun et al.12,31 based on Hamiltonian function method, and it has more extensively application in the control design of NSSs because the approach does not need to decompose the state of NSSs. In this article, the SOF controllers are designed by the state non-decomposition method for NSSs. The main contributions of this article compared with the existing literature are as follows:
(i) The controllers designed in the article are less conservative and more concise form.
(ii) In the article, the state of NSSs need not to be decomposed, and the singular matrix E has less constraints. Moreover, the nonlinear vector function does not need to satisfy Lipschitz conditions. Therefore, we can design SOF controllers for more NSSs.
(iii) The NSSs can describe practical systems more accurately and commonly. In the article, an controller and an adaptive controller are designed via SOF method for a nonlinear singular circuit system, and simulation results are very effective in attenuating external disturbances and estimating unknown parametric perturbations.
The structure of this paper is as follows. In ‘Stabilization of nonlinear continuous singular systems’ section, we study the stabilization of NSSs, and sufficient conditions of system impulse controllable are proposed. Next, an SOF controller is designed in ‘ control of nonlinear continuous singular systems via SOF’ section for NSSs with external disturbances. Under the foreshadowing of the ‘Stabilization of nonlinear continuous singular systems’ section and ‘‘ control of nonlinear continuous singular systems via SOF’ section, the adaptive control problem for NSSs with external disturbances and parametric perturbations are studied in ‘Adaptive control of nonlinear continuous singular systems via SOF’ section. To illustrate the validity of the controller designed in this article, an example on a nonlinear singular circuit system is given in ‘’Illustrative example’ section. A succinct conclusion is following in ‘Conclusion’ section.
Stabilization of nonlinear continuous singular systems
This section studies the stabilization of a class of NSSs under the sufficient conditions of the system impulse controllable.
Consider the following NSS
where is the state of the system, is the control input, is the output. , , and it is assumed that there exists a nonsingular matrix P such that . , , is a sufficiently smooth vector field of suitable dimensions.
First, the following definition is introduced in order to study the stability of the system (equation (1)).
Definition 1. For any given initial condition , if the obtained closed-loop singular system is impulse-free, the original system is called impulse-controllable, and the control law is also called admissible.32
Lemma 1. If a vector function with () has continuous nth-order partial derivatives, then can be represented as33
where , , are scalar functions.
According to Lemma 1, the system (equation (1)) can be transformed into
where is called the structural matrix.
We give the following assumptions in order to design the SOF control law of the system (equation (3))
A1) rank + rank(E), .
A2) rank , .
Remark 1. Assumptions A1 and A2 are impulse-controllable sufficient conditions of NSSs. And it is more convenient to check the impulse controllability of singular systems.
Lemma 2. If Assumptions A1 and A2 hold, then the system (equation (3)) is impulse controllable.
Proof. Because , there exist two nonsingular matrices such that
Denote
where , . Then, the system (equation (3)) can be replaced by the differential algebra system as follows
Noticing that
rank = rank
= rank + rank (E)
rank = rank = rank
we have rank , rank , that is, is of full row rank and is of full column rank. Therefore, there exists a control law such that is nonsingular. Thus, under the control law , the system (equation (3)) is impulse controllable, that is, the index of equivalent closed-loop singular system is 1 at equilibrium point 0. Thus, A1 and A2 are the sufficient conditions of the system (equation (3)) be impulse controllable.
The goal of this article is to find an SOF controller
such that the obtained closed-loop singular system is asymptotically stable, where .
Under Assumptions A1 and A2, the following results can be obtained.
Theorem 1. Assume Assumptions A1 and A2 are satisfied. Under the controller equation (6), if
holds, then the system (equation (3)) is asymptotically stabilization.
According to Lemma 2, the closed-loop system (equation (8)) is impulse-free under Assumptions A1 and A2. Define a suitable Lyapunov function . Based on equation (7), the time derivative of can be expressed as
Remark 2. The system (equation (3)) is impulse controllable as long as Assumptions A1 and A2 hold. Moreover, the nonlinear vector function does not need to satisfy Lipschitz conditions.
control of nonlinear continuous singular systems via SOF
In this section, it is given a solution to the problem of robust performance analysis for the disturbance system. First of all, construct an SOF control law so that the gain of the closed-loop system from w to z is less than , and the closed-loop system is asymptotically stable when , where is a given disturbance attenuation level and .
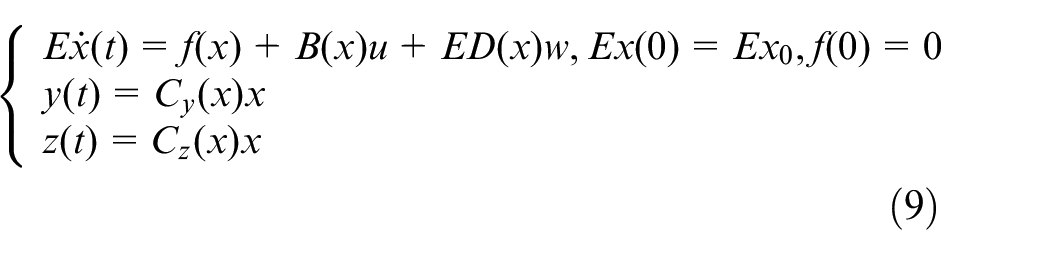
Consider the following nonlinear continuous singular system
where and are penalty signal and external disturbance, respectively; x, u, E, , and are the same as those in the system (equation (1)), and , .
Based on the SOF control law designed in ‘Stabilization of nonlinear continuous singular systems’ section, the following result can be obtained.
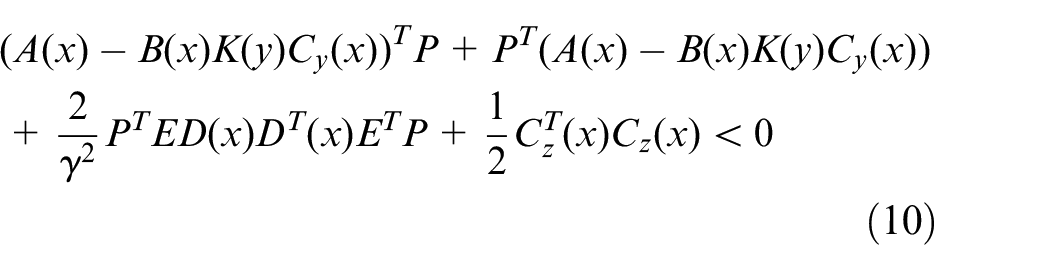
Theorem 2. If Assumptions A1 and A2 are established, and
then SOF controller (equation (6)) is the asymptotically stabilization control law of the system (equation (9)).
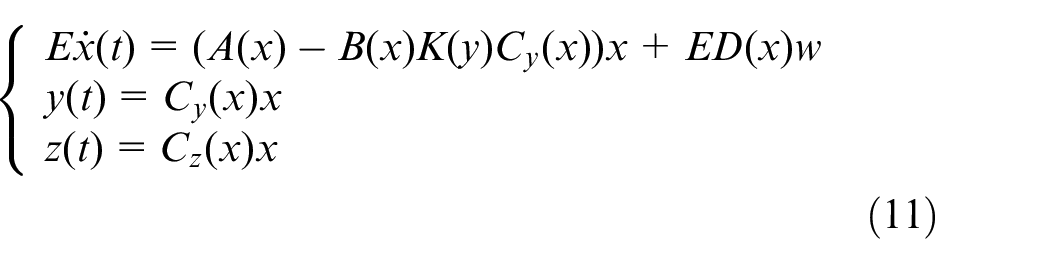
Proof. According to the controller (equation (6)) and ‘Stabilization of nonlinear continuous singular systems’ section, the closed-loop system of the system (equation (9)) can be denoted as
Define , then it can be obtained based on equation (10)
Thus
that is,
holds along the trajectory of the system (equation (11)). Therefore, the gain from w to z of the system (equation (11)) is less than . Next, it is proved that the closed-loop system (equation (11)) with the disturbance is asymptotically stable
It is implied that the closed-loop system (equation (11)) is asymptotically stable when . So, the SOF controller (equation (6)) is the asymptotically stabilization control law of the system (equation (9)).
Remark 3. Compared with the existed conclusions, the controller (equation (6)) designed in this paper is less conservative and more concise form.
Adaptive control of nonlinear continuous singular systems via SOF
Through the discussion of ‘Stabilization of nonlinear continuous singular systems’ and ‘ control of nonlinear continuous singular systems via SOF’ sections, this section studies the adaptive control problem of NSSs on the basis of existing ones and proposes a new control design scheme.
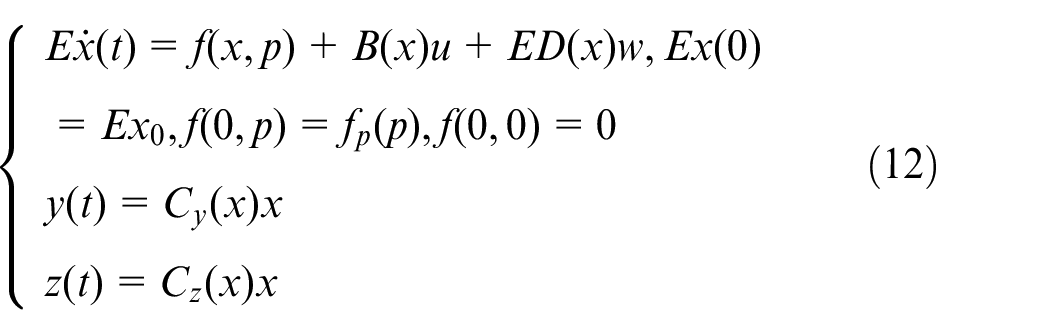
Consider the following nonlinear continuous singular system
where p is an unknown parameter perturbation vector and with being a known constant; x, y, z, u, w, E, , , , and are the same as those in the system (equation (9)).
As it can be seen from “ control of nonlinear continuous singular systems via SOF” section, the system (equation (12)) can be written as the following form
where is some vector of x and p satisfying .
In the system (equation (12)), the adaptive control problem by utilizing the SOF method is described as follows: for a given disturbance attenuation level , the following adaptive law control is designed
so that the gain of the closed-loop system from w to z is less than , and the closed-loop system is asymptotically stable when .
Design an adaptive controller based on the following assumption
A3) There exists a matrix such that
where is an unknown constant vector of p, and .
Assumption A3 is a matched condition. The system (equation (13)) can be transformed as follows under Assumption A3
Accordingly, Assumption A1 can be rewritten as
A1′) rank + rank(E),
On the basis of ‘Stabilization of nonlinear continuous singular systems’ section, under the control law
the system (equation (15)) can be changed as the following form
where v is a new reference input and is the same as that in equation (6).
It is clear that Assumptions A1′ and A2 are the sufficient conditions of the system (equation (13)) being impulse controllable. Based on the control law equation (16), the adaptive control law can be designed for the system (equation (17))
where is an estimation of , and is the adaptive gain constant matrix.
then the system (equation (19)) can be transformed into the following form
Based on the previous analysis, we give the following theorem.
Theorem 3. Consider the system (equation (12)) with its equivalent form (equation (13)). Suppose that Assumptions A1′, A2 and A3 are satisfied for the system (equation (13)). If
holds, then the system (equation (12)) is asymptotically stabilization under adaptive control law
where , and are the same as that in equations (6), (14) and (18), respectively.
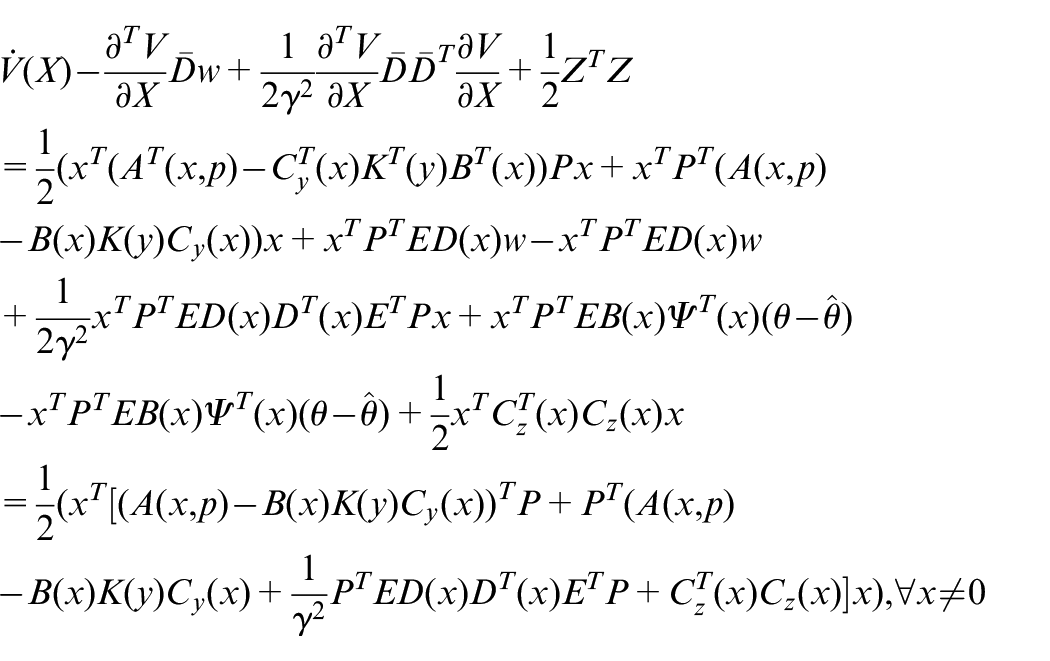
Proof. Choose , then has a local minimum at . Based on the proof of Theorem 2, the system (equation (20)) and the condition (equation (21)), it can be obtained
Similar to the proof of Theorem 2, we can show that the gain from w to z of the system (equation (20)) is less than . Furthermore, when
Thus, the closed-loop system (equation (19)) is asymptotically stable when w vanishes. Therefore, the control law (equation (22)) is the SOF adaptive controller for the system (equation (12)).
Remark 4. In the article, the state of NSSs does not need to be decomposed and the singular matrix E has fewer constraints in the design process of SOF controller. Therefore, it can be applied to more NSSs.
Illustrative example
In this section, we provide an illustrative example to demonstrate the efficacy of the adaptive controller proposed in Theorem 3.
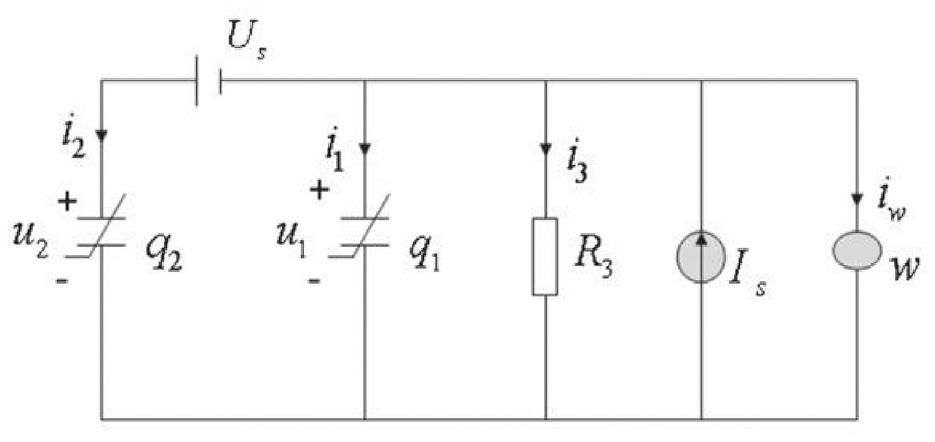
Figure 1 depicts a nonlinear circuit system (equation (12)), where the capacitance is controlled by the electric charge q, its characteristic is represented by and is a disturbance signal. The circuit system can be expressed using Kirchhoff’s current law and Kirchhoff’s voltage law
Nonlinear singular circuit system.
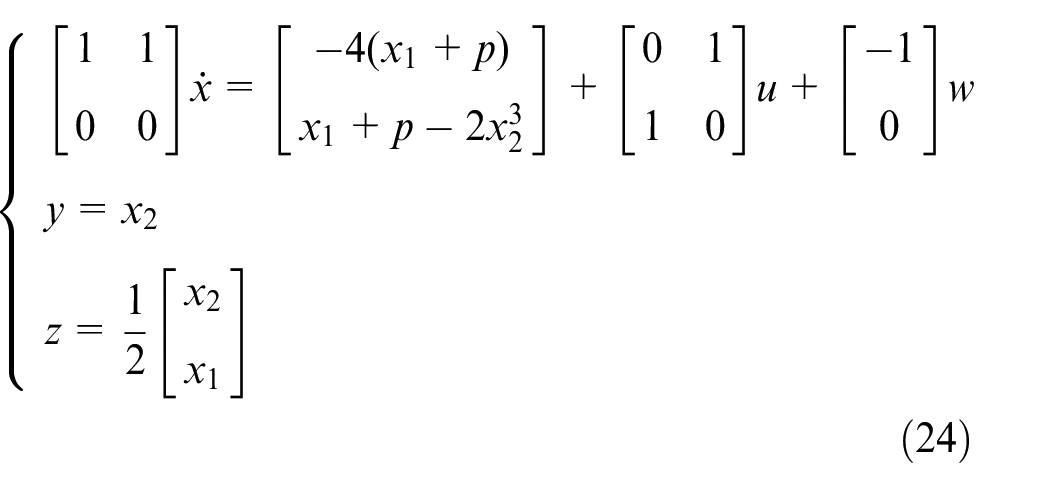
Choose and as the output and penalty signal, respectively. Denote , and , where p is unknown parametric perturbation satisfying . Let , and . Then, system equation (23) can be rewritten as
According to , we obtain ; it is simple to verify that Assumptions A1′ and A3 are accurate, where and .
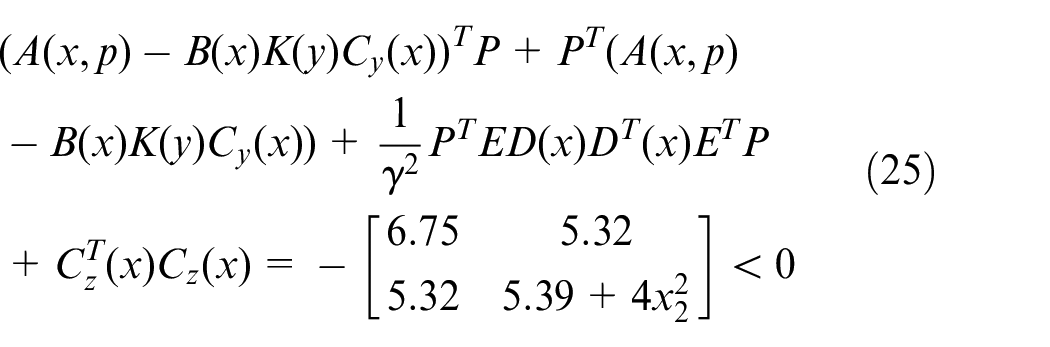
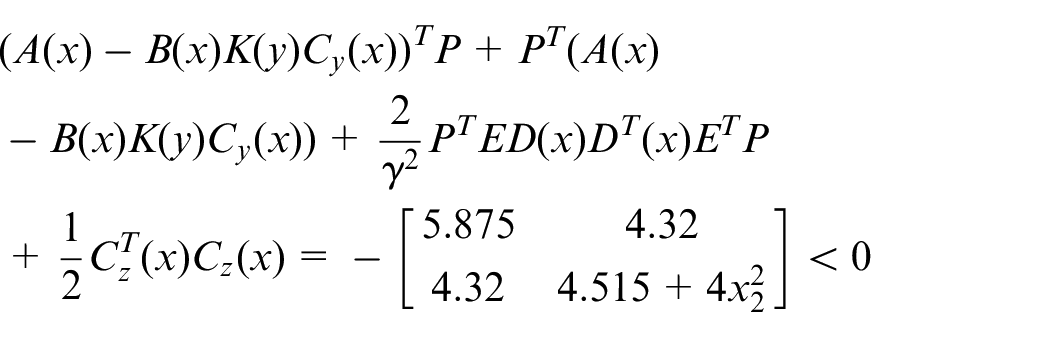
According to the inequality equation (21), we can obtain a solution
such that
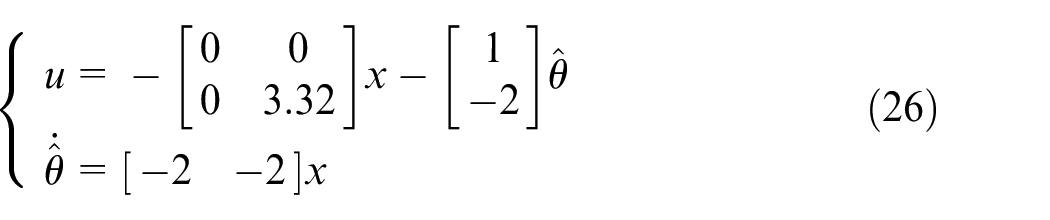
Thus, the all conditions of Theorem 3 are satisfied. Based on Theorem 3, the SOF adaptive controller of the system equation (24) can be designed as follows
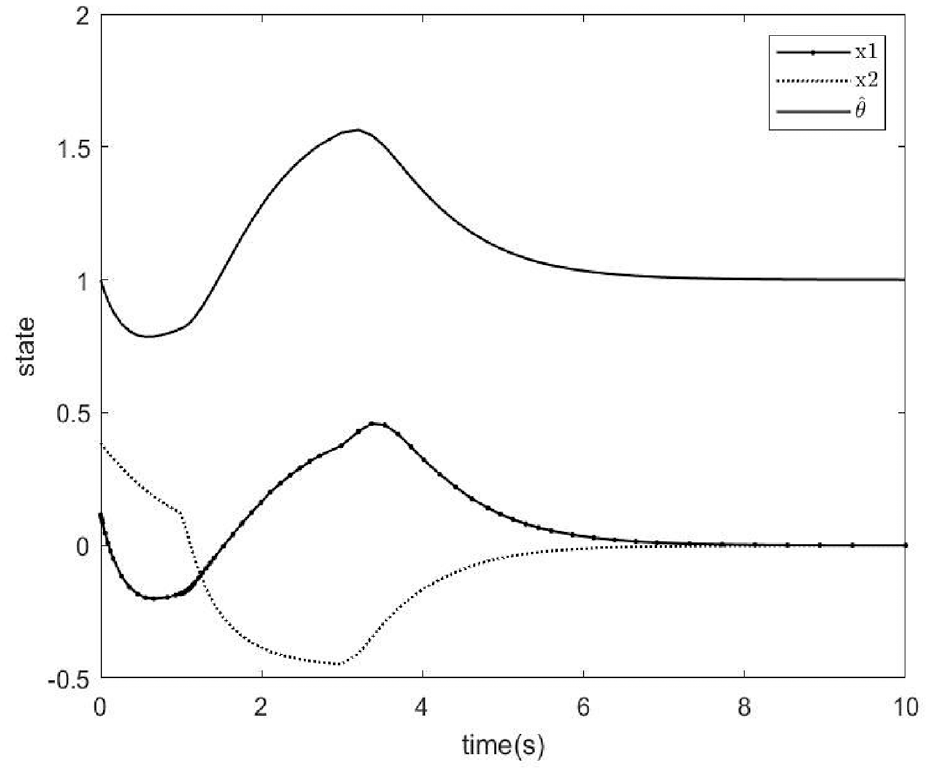
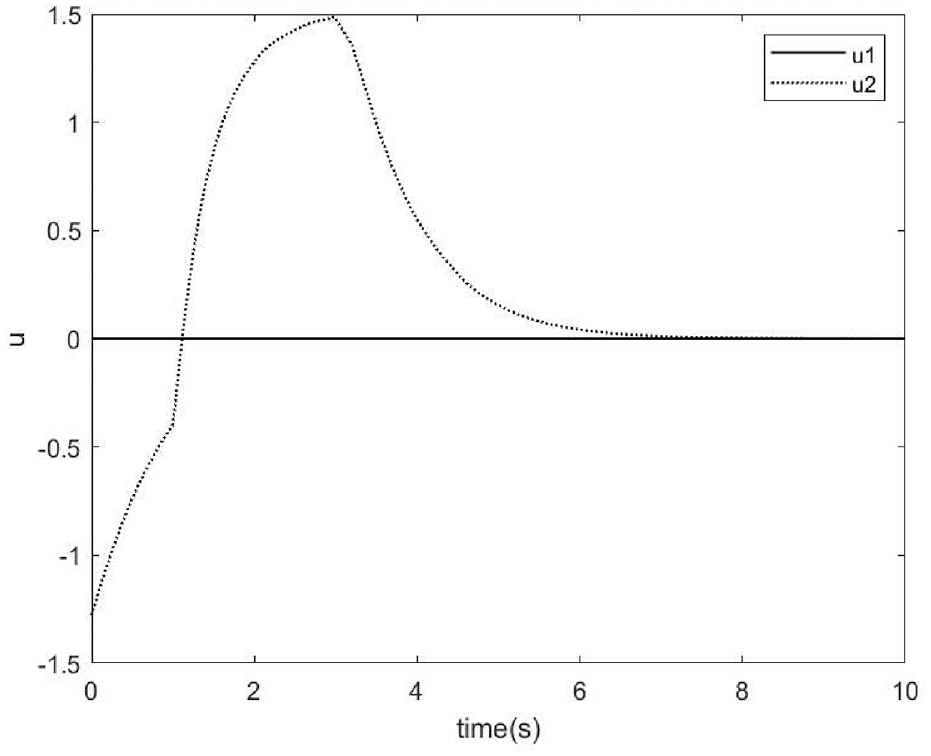
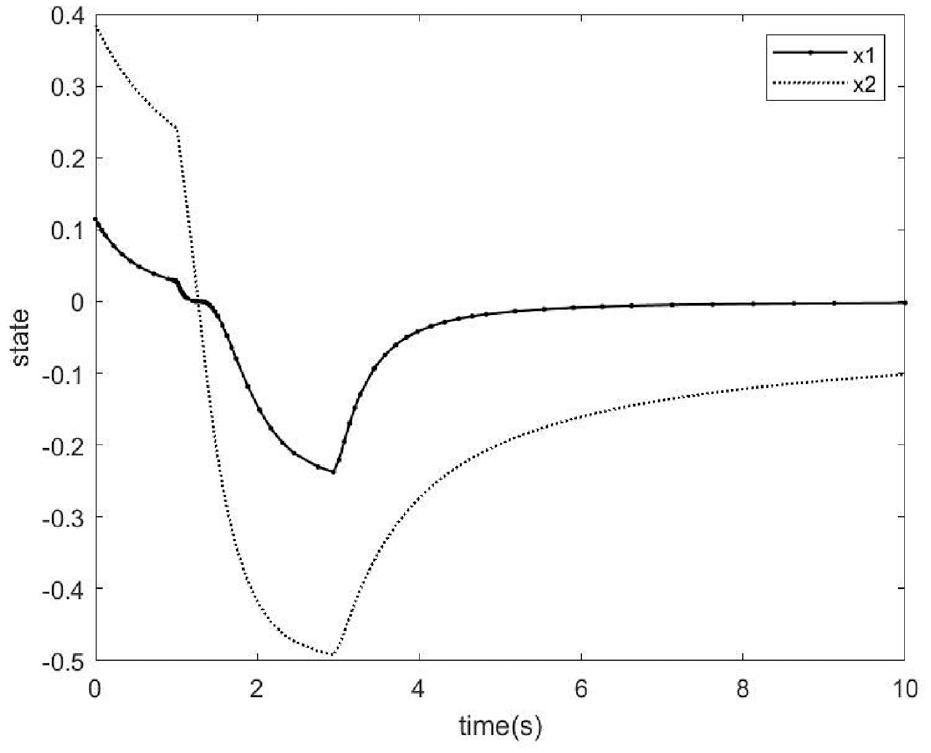
To demonstrate the validity of the adaptive controller (equation (26)), we conduct some numerical simulations with the following options: give initial condition , . To test the controller’s robustness to external disturbances, we add a square-wave disturbance of amplitude to the system in the time duration . Figures 2 and 3 show the response of the state x, and control signal u, respectively.
Response of the state x and .
The control signal u.
Remark 5. If system equation (23) does not have a perturbation vector p, then the adaptive controller (equation (26)) degenerates to an controller, as long as . The corresponding controller can be expressed as
It is easy to check that
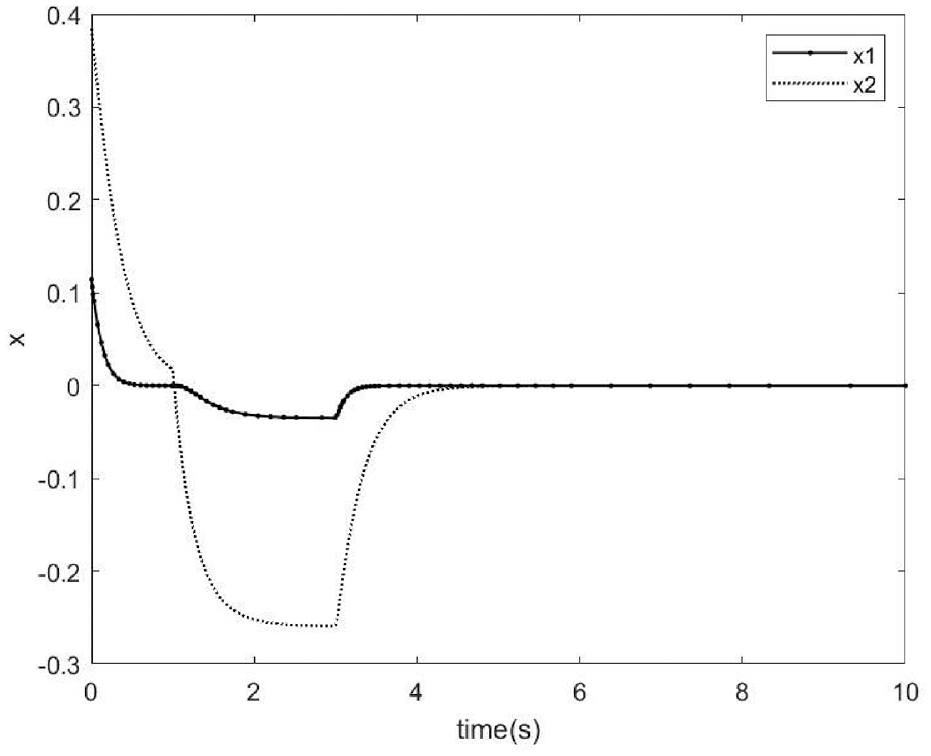
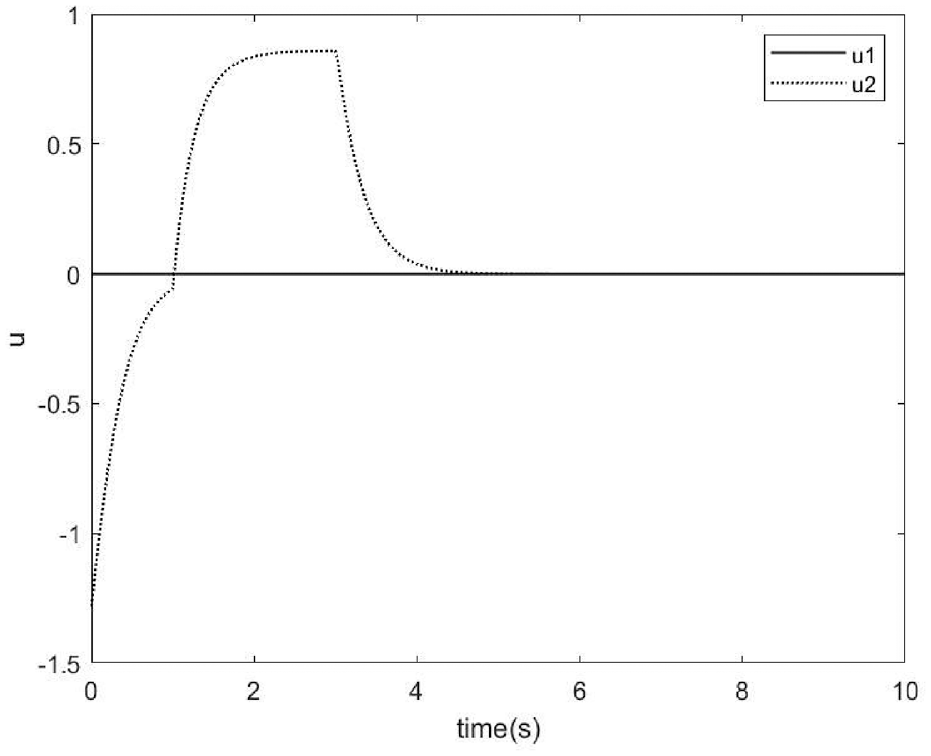
To evaluate the validity of the controller (equation (27)), we select the same initial values and parameters as adaptive controller (equation (26)). Figures 4 and 5 show the response of the state x for the open-loop system and the closed-loop system, respectively. Figure 6 depicts the control signal u.
Response of the state x for the open-loop system.
Response of the state x for the closed-loop system.
The control signal u.
Figures 2 and 5 show that once the disturbance is gone, the state of the system rapidly converges to the origin. The simulation results show that the adaptive controller (equation (26)) and controller (equation (27)) are extremely effective at mitigating external disturbances.
Moreover, it is obvious from Figures 2 and 5 that the controller (equation (27)) makes the state amplitude of closed-loop system be smaller than that of the adaptive controller (equation (26)) after adding the same interference, and makes the convergence speed of the system’s state be faster than that of the adaptive controller when the interference disappears, while the adaptive controller (equation (26)) can estimate the unknown parameter perturbations.
Conclusion
For a class of continuous NSSs, the SOF control and adaptive control are examined in this study. A new SOF control strategy for the NSSs is suggested based on the sufficient conditions of the system’s impulse controllability. In addition, the control and adaptive control problems are taken into account for the NSSs with disturbances. Finally, a nonlinear singular circuit example is provided, and the simulation results demonstrate the viability of the proposed controllers. Future research interests include SOF control problems for NSSs with saturation or time delay.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Nature Science Foundation of China (61877028, 61773015).
ORCID iDs
Liying Sun
Renming Yang
References
1.
DaiL.Singular control systems. Berlin: Springer, 1989.
2.
XiaoXParkJHZhouL.Stabilization of switched linear singular systems with state reset. J Frankl Inst2019; 356(1): 237–247.
3.
DuZHuSLiJ.Event-triggered H-infinity stabilization for singular systems with state delay. Asian J Control2021; 23(2): 835–846.
4.
LiuYZhiHWeiJ, et al. Event-triggered control for linear continuous switched singular systems. Appl Math Comput2020; 374: 125038.
5.
ShuYZhuY.Optimal control for multi-stage and continuous-time linear singular systems. Int J Syst Sci2018; 49(7): 1419–1434.
6.
ChenJLinCChenB, et al. Mixed and passive control for singular systems with time delay via static output feedback. Appl Math Comput2017; 293: 244–253.
7.
SunXZhangQ.Sliding mode control for a class of nonlinear singular systems with partly immeasurable premise variables. IEEE Trans Syst Man Cyb Syst2021; 51(4): 2433–2443.
8.
LiuQLiRZhangQ, et al. Adaptive robust sliding mode control for singular systems with time-varying delay and uncertain derivative matrix. Int J Control Autom Syst2019; 17(12): 3179–3193.
9.
XuQZhangYHeW, et al. Event-triggered networked control of discrete-time nonlinear singular systems. Appl Math Comput2017; 298: 368–382.
10.
SunWLiuDTangY.Global asymptotic stabilisation and control for a class of nonlinear Hamiltonian singular systems with delays and saturation. Int J Syst Sci2020; 51(5): 811–825.
11.
SunLWangY.An undecomposed approach to control design for a class of nonlinear descriptor systems. Int J Robust Nonlin Control2013; 23(6): 695–708.
12.
SunLWangYFengG.Control design for a class of affine nonlinear descriptor systems with actuator saturation. IEEE Trans Autom Control2014; 60(8): 2195–2200.
13.
LiMSunL.Finite-time stabilisation for a class of nonlinear descriptor systems. IET Control Theor Appl2018; 12(17): 2399–2406.
14.
CarniatoLACarniatoAATeixeiraMCM, et al. Output control of continuous-time uncertain switched linear systems via switched static output feedback. Int J Control2020; 93(5): 1127–1146.
15.
BahreiniMZareiJ.Robust fault-tolerant control for networked control systems subject to random delays via static-output feedback. ISA Trans2019; 86: 153–162.
16.
ZhaiDAnLYeD, et al. Adaptive reliable static output feedback control against Markovian jumping sensor failures. IEEE Trans Neur Netw Learn Syst2018; 29(3): 631–644.
17.
ChangXHParkJHZhouJ.Robust static output feedback control design for linear systems with polytopic uncertainties. Syst Control Lett2015; 85: 23–32.
18.
BelozyorovVY.New solution method of linear static output feedback design problem for linear control systems. Lin Algeb Appl2016; 504: 204–227.
19.
ZhangMShiPShenC, et al. Static output feedback control of switched nonlinear systems with actuator faults. IEEE Trans Fuzz Syst2019; 28(8): 1600–1609.
20.
EkramianM.Static output feedback problem for Lipschitz nonlinear systems. J Frankl Inst2020; 357(3): 1457–1472.
21.
WangWMaSZhangC.Stability and static output feedback stabilization for a class of nonlinear discrete-time singular switched systems. Int J Control Autom Syst2013; 11(6): 1138–1148.
22.
LiuYWangZMaL, et al. Robust control for a class of uncertain nonlinear systems with mixed time-delays. J Frankl Inst2018; 355(14): 6339–6352.
23.
AbootalebiASheikholeslamFHosseinniaS.Adaptive reliable control of uncertain affine nonlinear systems. Int J Control Autom Syst2018; 16(6): 2665–2675.
24.
LuXZhangXSunL.Finite-time control for nonlinear discrete Hamiltonian descriptor systems. J Frankl Inst2017; 354(14): 6138–6151.
25.
BeattieCMehrmannVXuH, et al. Linear port-Hamiltonian descriptor systems. Math Control Signal Syst2018; 30(4): 1–27.
26.
WangGSunW.Output tracking of time-delay Hamiltonian descriptor systems under saturation constraints. J Frankl Inst2022; 359(7): 2976–2999.
27.
LuXLiH.A hybrid control approach to problem of nonlinear descriptor systems with actuator saturation. IEEE Trans Autom Control2021; 66(10): 4960–4966.
28.
SoraviaP. control of nonlinear systems: differential games and viscosity solutions. SIAM J Control Optim1996; 34(3): 1071–1097.
HaddadWMLancharesM.Dissipativity theory for discrete-time nonlinear stochastic dynamical systems. Int J Robust Nonlin Control2022; 32(11): 6293–6314.
31.
SunLFengGWangY.Finite-time stabilization and control for a class of nonlinear Hamiltonian descriptor systems with application to affine nonlinear descriptor systems. Automatica2014; 50(8): 2090–2097.
32.
XuHMizukamiK.Hamilton-Jacobi equation for descriptor systems. Syst Control Lett1993; 21(4): 321–327.
33.
LangsonWAlleyneA.Infinite horizon optimal control of a class of nonlinear systems. In Proceedings of the 1997 American control conference, Albuquerque, NM, 6 June 1997, vol. 5, pp.3017–3022. New York: IEEE.