This article studies the control problem of Markov jump systems subject to actuator saturation and partial mode information. The asynchronous phenomenon between the controller and the plant is addressed by introducing a hidden Markov model. By means of convex hull method, some sufficient conditions are obtained to guarantee the stochastic stability of the saturated Markov jump systems. Finally, a numerical example is given to illustrate the effectiveness of the algorithm.
Markov jump systems (MJSs) are a class of hybrid systems with the switchable modes following the rule of Markov process. Due mainly to the jumping characteristic from Markov process, MJSs are effective in modeling complex systems whose structures and parameters are susceptible to abrupt variations.1,2 Over the past decade, more attention has focused on the control problems of MJSs, and a string of related achievements have been made. Cao et al.3 considered the hybrid sliding mode control problem for the uncertain Markovian jump systems. A synchronous fuzzy logic systems (FLS)-based adaptive fault-tolerant compensation controller was proposed to guarantee the stability of MJSs.4 The synchronous neural network-based adaptive fault-tolerant control was considered for MJSs with nonlinearity and actuator faults.5 A model-free adaptive optimal control policy for discrete-time MJSs was developed in the works of Zhou et al.6 The control problem of a class of singular MJSs with time-varying inputs and state delays was investigated.7
Furthermore, in the control field, actuator saturation is an undesired phenomenon, which results from physical limitations and may degrade the performance of systems, even cause systems to become unstable. Actuator saturation was handled by regarding as a locally sector bounded nonlinearity.8,9 The concept of domain of attraction in mean square sense was proposed to analyze the stochastic stability of closed-loop systems.10 A design algorithm of synchronous controller for Markovian jump systems with actuator saturation was deduced in the works of Saravanakumar et al.,11 which satisfies extended dissipation. A self-triggered saturated model predictive control for MJS subject to actuator saturation was studied in finite-frequency domain.12 The synchronization problem for a class of discrete complex dynamical networks in the presence of Markov jump topology and actuator saturation was addressed in the works of Li et al.13 However, MJSs with actuator saturation have not yet been investigated fully, which motivates our work.
It should be noticed that the references mentioned above are based on two assumptions: the mode information of plant is available completely and accurately, and the designed controller is operated synchronously with the plant. However, in practice, acquisition of complete mode information is questionable and the cost is probably high, due to time delay and other physical limitations. The synchronous stability analysis for discrete-time MJLSs with partially known transition probability was given by Zhang et al.14 A synchronous controller was designed for a class of discrete-time MJSs with partially unknown transition probability.15 Some references have recently discussed parametric adaptive control based on partial mode information. A neural adaptive control was proposed for the single-rod electro-hydraulic system (EHS) with uncertain hydraulic parameters and unknown external load.16 The parametric uncertainty that existed in the manipulator model was considered in the works of Guo et al.17 and an adaptive estimation law is designed to enhance the controller robustness. Furthermore, mode information of system may not be accurately delivered to controller because of practical constrictions. The asynchronous phenomenon between system and controller was proposed by Wu et al.18 The asynchronous phenomenon was described via establishing a hidden Markov model (HMM) in the works of Xue et al.19 and the tracking control was guaranteed. The asynchronous control problem was investigated for uncertain MJSs with actuator saturation.20 Observer-based finite-time asynchronous sliding mode control for MJSs with time-varying delay was studied in the works of Wang and Ma.21 In view of the fact that the actuator saturation and partial mode information have not yet been considered for MJSs simultaneously till now, accordingly, in this article, the asynchronous control problem is considered for saturated MJSs with partial mode information. Based on convex hull method, the control algorithm is designed to guarantee stochastic stability. Finally, a numerical example is given to demonstrate the effectiveness of the scheme.
The contributions of this work are twofold. First, the HMM with partial available mode observation conditional probability matrix is established to deal with the asynchronous phenomenon between the controller and the plant. Second, the design algorithm of controller is deduced to guarantee that MJSs with actuator saturation and partially available observation conditional probability satisfy stochastic stability.
The rest of the article is summarized as follows. In the second section, the preliminaries for MJSs with actuator saturation is elaborated. In the third section, some sufficient conditions are proposed to assure that the resulted closed-loop hidden MJSs satisfy stochastic stability. The fourth section provides a numerical example to demonstrate the effectiveness of the design scheme of asynchronous controller. The conclusion is drawn in the fifth section.
Notations. The notations in this article are quite standard. and denote, respectively, the n dimensional Euclidean space and the set of all real matrices. Superscript ’T’ indicates matrix transposition. In symmetric block matrices, ★ is the short form for the symmetric terms. is expectation operator. is the operator norm (the largest eigenvalue of of matrix A).
Problem formulation
Consider the following discrete-time MJSs as
where is the control input and is the system state. The system matrices are functions of the stochastic process , which denotes a Markov chain taking values in a finite set with the transition probability matrix given as
where , , for all . For simplicity, when each possible value , it has , where are constant matrices with appropriate dimensions.
The function is the standard saturation function with appropriate dimensions defined as , where . The notation of has been slightly abused to denote both the scalar valued and the vector valued saturation functions.
In practice, the information of system mode accessible to controller is often inaccurate, that is, the observed mode in controller side may asynchronize with system mode. To address the asynchronous phenomenon, we introduce a stochastic variable to represent the mode information of the controller taking values in a sample set with the conditional probability matrix given as
where , , and
Choose the asynchronous controller as
where is a -dependent controller gain matrix and it can be simplified as with .
Remark 1. and can construct an HMM and the following closed-loop MJSs(7) can be regarded as a hidden MJSs, in which, the stochastic process is not observable, but can only be observed through the mode of controller that produces the sequence of observations . And the conditional probability matrix describes the relationship between and . In the elements of an HMM, we assume that every observation in controller side is independent. And for Markov assumption itself, the transition probability of being in a given system state at time k only depends on the state at time , i.e., .
Let be the c-th row of the matrix H, and define the symmetric polyhedron by . Let be a set of positive-definite matrix, and denote . Let be the set of diagonal matrix, the diagonal elements of it are either 1 or 0. Assume that each element of is labeled as , , and denote . Obviously, if , is also an element of .
To transform the asynchronous control problem of saturated nonlinearities into that of linear feedback, the lemmas are introduced as follows.
Lemma 1. Hu et al.22 and Cao et al.23 assume that two feedback matrices are given. For , if , then
where a scalar valuesatisfies.
Remark 2. In Lemma 1, can be treated as an independent variable whose value range needs to be analyzed. When , we can set to obtain . When , we can set a proper scalar value that satisfies to guarantee . Overall, the transformation from saturation function to convex set function can be realized by conversion function equation (5), whether or .
Lemma 2. Cao et al.23 suppose that matrices , and a positive- definite matrix are given. If , then
Combining discrete-time system equation (1) with asynchronous controller equation (4), under the condition , the closed-loop hidden MJSs can be described as
Based on closed-loop hidden MJSs (7) and condition , the control target is to find the largest set that all initial states starting from it can remain in it totally and trend to the origin. Before proposing the detail design procedure, we introduce the following concept of stochastic stability.
Definition 1. Peng et al.24 let a set be the domain of attraction in mean square sense of systems equation (1) and denote the trajectory of the state starting from initial state . Systems equations (1)–(2) [with satisfy stochastic stability at the origin if, for every initial state , there exist the inequality
Main results
In this section, some sufficient conditions are established to ensure closed-loop hidden MJSs (7) satisfy stochastic stability under the condition .
However, acquiring the complete information of observation probability is difficult or costly to be accomplished, that is, some elements of are unknown. For notation clarity, denote the finite set , , with
Theorem 1. Based on the asynchronous controller equation (4), systems equation (1) are stochastically stable, and the set lies in the domain of attraction in mean square sense,25 if for all , , there exist matrices to ensure the inequality holds as
where
Proof. Choose the system mode-dependent Lyapunov function as
Introducing operator , and taking it on both sides of the inequality equation (19), then by equation (18), one has
Continuing the above procedure iteratively from to , we can obtain
Finally, taking the limit on both sides of inequality equation (21)
Furthermore, the following inequality is derived from equation (22) as
where is a bounded matrix. The results above denote that the set is in the domain of attraction in mean square sense. On this account, hidden MJSs(7) is stochastically stable under the condition . This completes the proof.
In Theorem 1, sufficient conditions equations (9) and (10) are given to judge if the initial state is contained in the domain of attraction. Nevertheless, equations (9) and (10) cannot be directly applied to design the controller, owing to the nonlinear terms . In order to facilitate the procedure of the design controller, we transform the conditions into linear matrix inequalities (LMIs).
Let be a bounded convex set containing the origin, and it can be best described as a polyhedron , where symbolize the given initial states in . If the initial state lies in the domain of attraction, the following maximization optimization problem can be formulated as
s.t. (i)
(ii) Inequality (9)
First, for initial states with , condition (i) in equation (24) is equivalent to . Hence, it obtains
By Schur complement, it has
Second, according to Schur complement, condition (ii) in equation (24) is equivalent to
Finally, one sufficient condition to satisfy (iii) in equation (24) is , and it is equivalent to , when . By Schur complement, one has
Nevertheless, due to the disunity of and its inversion, equations (26)–(28) cannot be applied to solve the controller synthesis problem. To deal with the dilemma, specific operations are given as follows.
To parameterize , we let , . Pre- and post-multiplying inequality equations (28) and (32), respectively, by , with denotes the c-th row of G, it has
where
Undoubtedly
which demonstrates . Combining equations (33) and (34), the following can be obtained
Let , , and , then the optimization problem equation (24) can be transformed into the following LMI problem
A numerical example
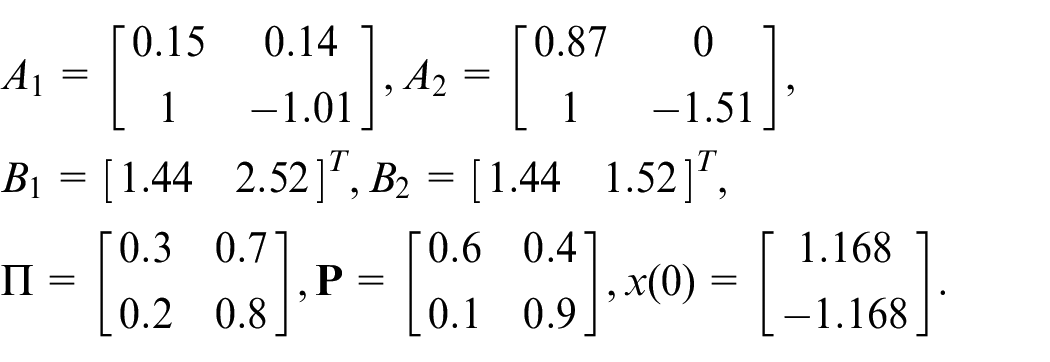
Consider discrete-time MJSs with the following parameters
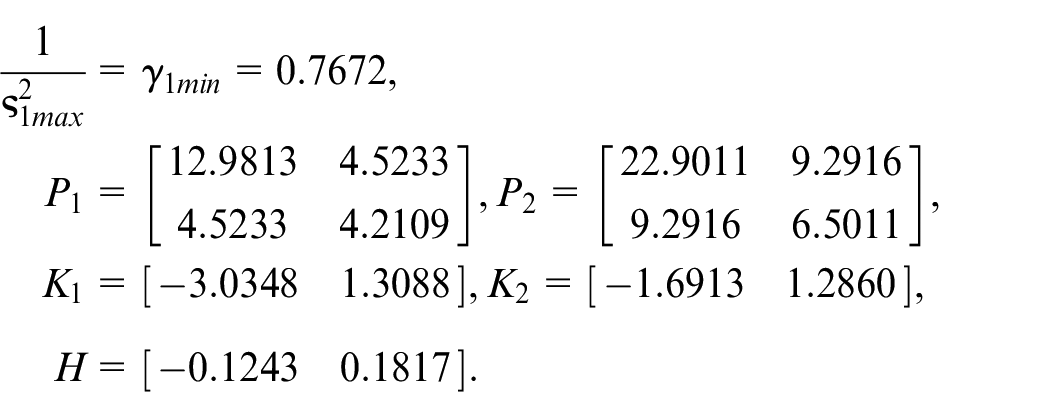
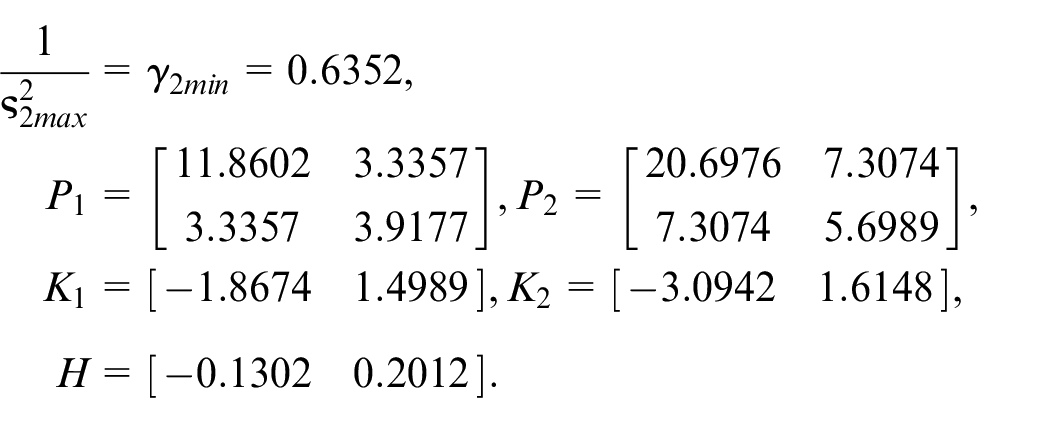
To design the asynchronous controller, we handle the LMI problem OP1 in MATLAB to get
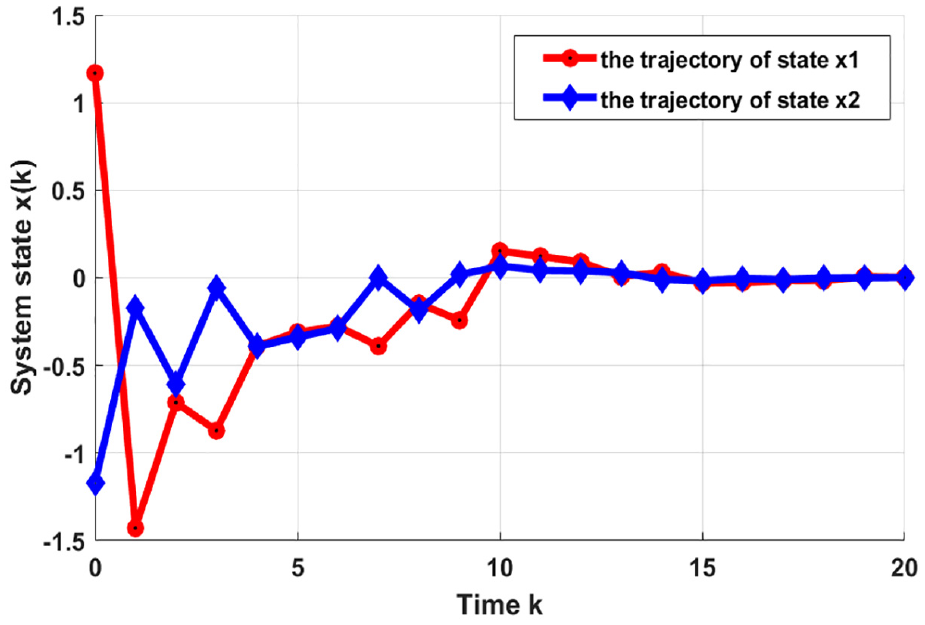
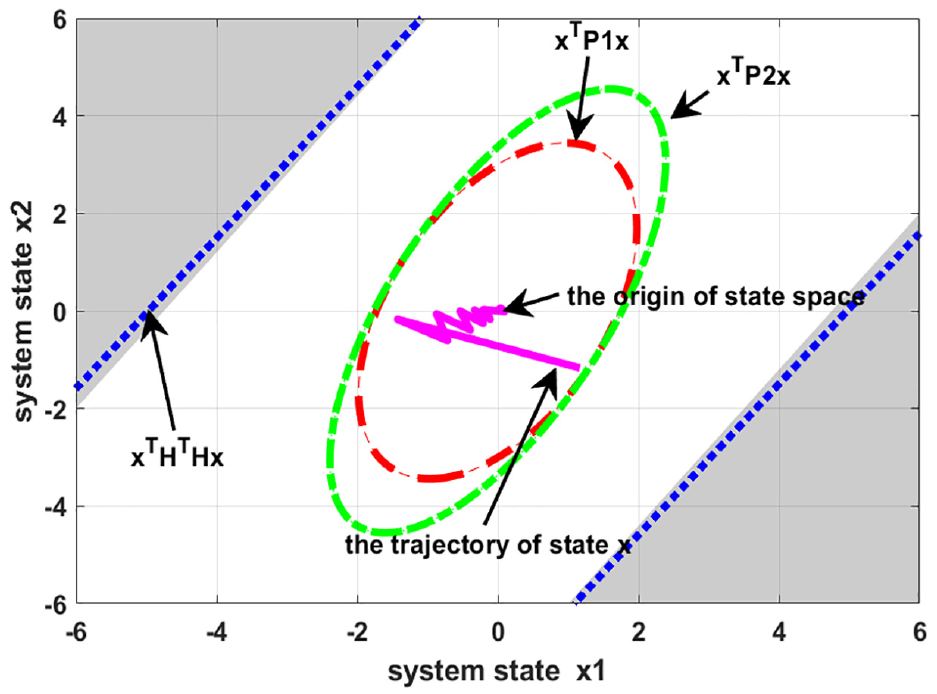
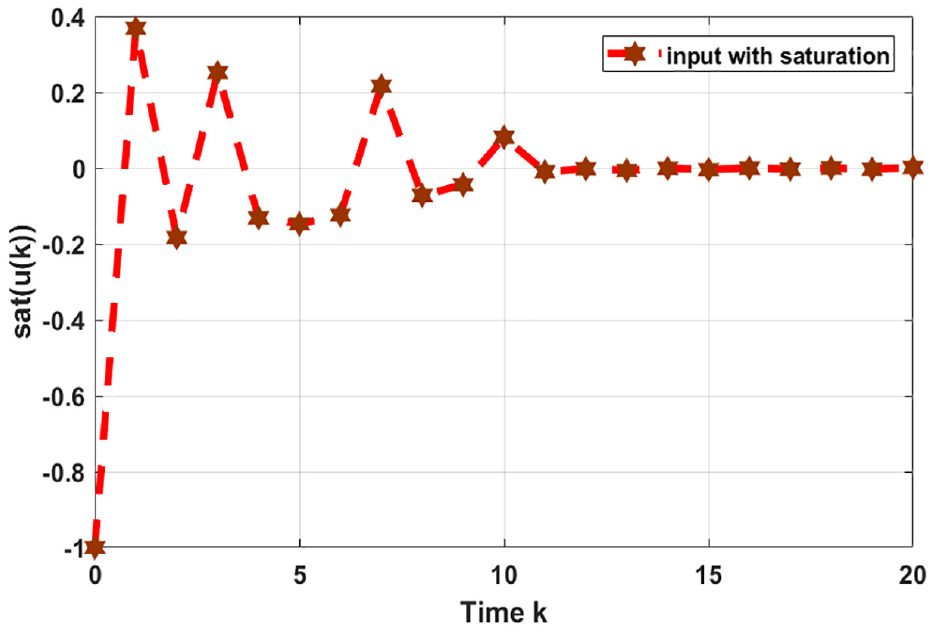
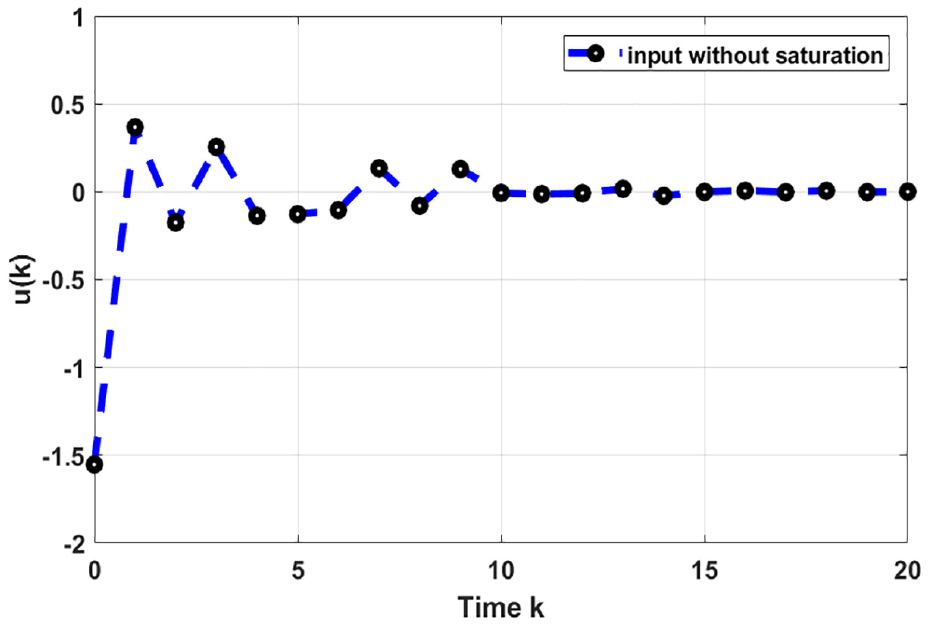
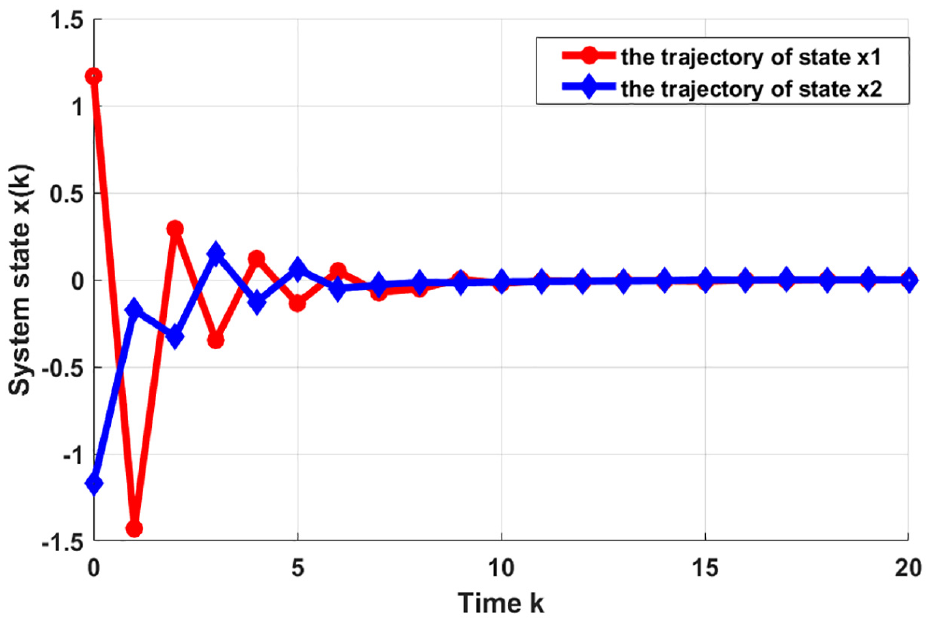
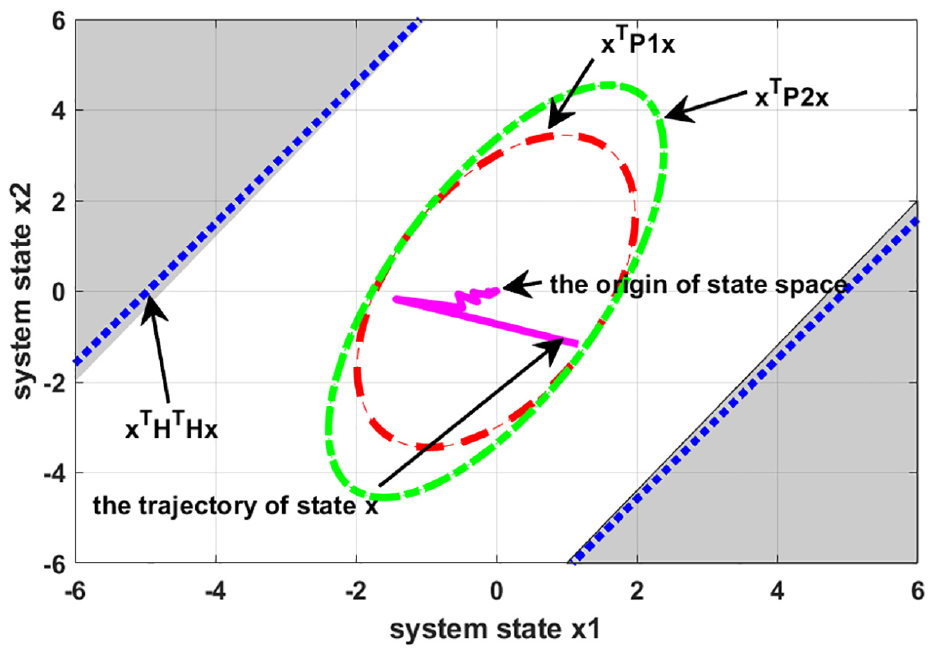
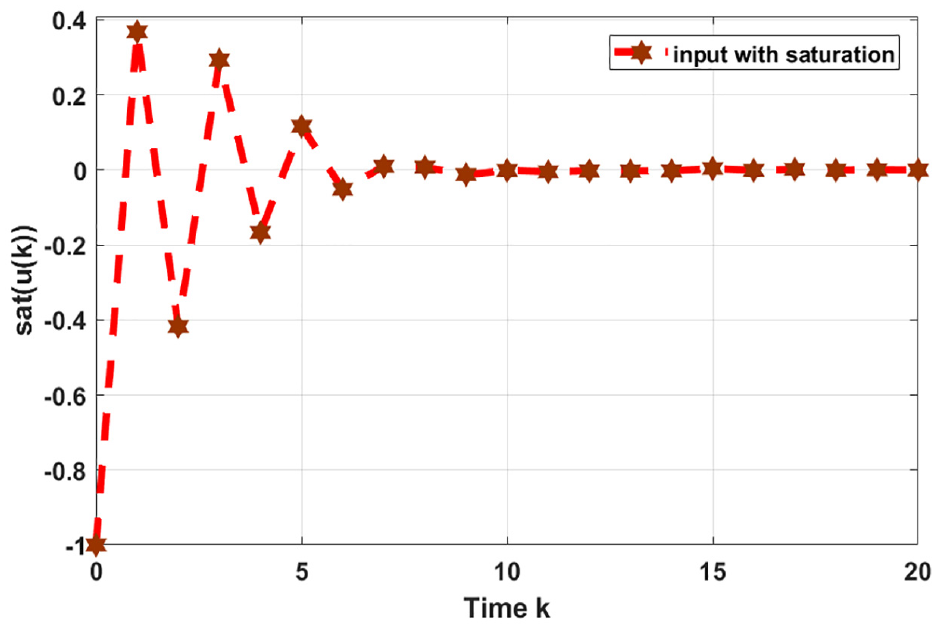
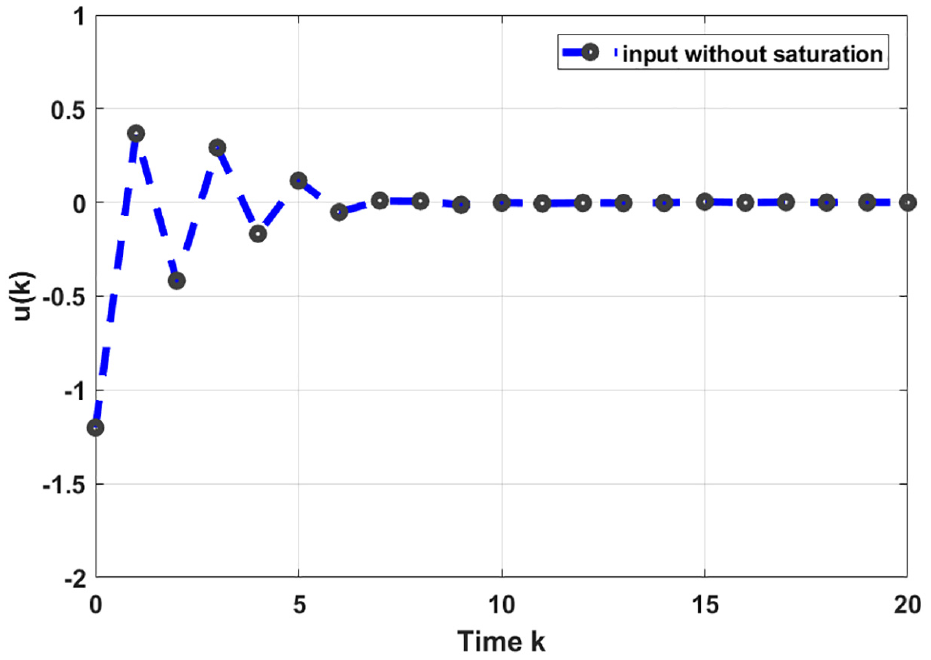
The simulation results of MJSs with partial mode information are depicted in Figures 1–4. Figure 1 manifests the trajectory of state and responding with time k. In Figure 2, the domain of is obviously smaller than that of . The trajectory of initial states contained in can remain in and trend to origin. Figure 3 describes the system input with saturation, and the system input without saturation is shown in Figure 4.
The trajectory of system state and .
Stability of MJSs with partial mode information.
System input with saturation.
System input without saturation.
As a comparison, we make a simulation for MJSs with completely observable mode information in Figures 5–8. After processing the optimization problem, it has
Apparently, the fluctuation range of the system state and the time required for system state to trend to equilibrium point are longer in systems with partial mode information.
The trajectory of system state and .
Stability of MJSs with completely observable mode information.
System input with saturation.
System input without saturation.
Conclusion
This work has investigated the asynchronous control problem of MJSs, subject to actuator saturation and partial mode information. The asynchronous phenomenon between the system and the controller is handled by introducing the HMM. Give the sufficient conditions to judge if the initial state belongs to the domain of attraction and ensure the hidden MJSs guarantee stochastic stability, the controller algorithm designed in the linear systems can still guarantee the stochastic stability of the original systems. Based on existing foundation, we will analyze the asynchronous stability for discrete-time MJSs with partially known transition probability in the future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Key Projects of Natural Science Research in Colleges and Universities of Anhui province, Grant/Award No: KJ2020A0128, the Open Fund from the National-Local Joint Engineering Laboratory, Grant/Award No: NELCOF20210101, and the Open Fund from Anhui Engineering Laboratory for Sports Health Information Monitoring Technology, Grant/Award No: KF2022ZD03.
ORCID iD
Shan Jiang
References
1.
ShiPLiF. A survey on Markovian jump systems: modeling and design. Int J Control Autom Syst2015; 13: 1–16.
2.
ZhuFZPengLYangRT. Event-triggered distributed filtering for Markov jump systems over sensor networks. Proc IMechE, Part I: J Systems and Control Engineering2021; 235: 1482–1493.
3.
CaoZRNiuYGLamJ, et al. Hybrid sliding mode control scheme of Markovian jump systems via transition rates optimal design. IEEE Trans Syst Man Cybernet: Syst2020; 2020: 1–12.
4.
YangHJiangYYinS. Adaptive fuzzy fault-tolerant control for Markov jump systems with additive and multiplicative actuator faults. IEEE Trans Fuzzy Syst2021; 29: 772–785.
5.
YangHYYinSKaynakO. Neural network-based adaptive fault-tolerant control for Markovian jump systems with nonlinearity and actuator faults. IEEE Trans Syst Man Cybernet Syst2020; 99: 1–12.
6.
ZhouPXWenJWSwainAK, et al. Model-free adaptive optimal control policy for Markov jump systems: a value iterations algorithm. Proc IMechE, Part I: J Systems and Control Engineering2022; 236: 1819–1829.
7.
ZhouJLaiHLLiuCY, et al. Controller design for singular Markov jump systems with time-delays. Proc IMechE, Part I: J Systems and Control Engineering2022; 236: 1566–1577.
8.
HindiHBoydS. Analysis of linear systems with saturation using convex optimization. In: Proceedings of the 37th IEEE conference on decision and control (Cat. No.98ch36171), Tampa, FL, 18 December 1998, pp. 903–908. New York: IEEE.
9.
KosutR. Design of linear systems with saturating linear control and bounded states. IEEE Trans Automat Control1983; 28: 121–124.
10.
LiuHPSunFCBoukasEK. Robust control of uncertain discrete-time Markovian jump systems with actuator saturation. Int J Control2007; 79: 805–812.
11.
SaravanakumarTAnthoniSMZhuQX. Resilient extended dissipative control for Markovian jump systems with partially known transition probabilities under actuator saturation. J Franklin Inst2020; 357: 6197–6227.
12.
LiuYLWenJWLuanXL, et al. Finite-frequency self-triggered model predictive control for Markov jump systems subject to actuator saturation. Trans Inst Meas Control2022; 44: 2406–2417.
13.
LiQShenBWangZ, et al. Synchronization control for a class of discrete time-delay complex dynamical networks: a dynamic event-triggered approach. IEEE Trans Cybernet2019; 49: 1979–1986.
14.
ZhangLXBoukasEKLamJ. Analysis and synthesis of Markov jump linear systems with time-varying delays and partially known transition probabilities. IEEE Trans Automat Contr2008; 53: 2458–2464.
15.
ZhangQLWangGLLiuWQ, et al. Stabilization of discrete-time Markovian jump systems with partially unknown transition probabilities. Discrete Cont Dynamic Syst–B2011; 16: 1197–1211.
16.
QingGChenZL. Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty. Mech Syst Signal Proc2021; 146: 106869.
17.
GuoQZhangYCellerBG, et al. Neural adaptive backstepping control of a robotic manipulator with prescribed performance constraint. IEEE Trans Neural Netw Learn Syst2019; 30: 3572–3583.
18.
WuZGShiPShuZ, et al. Passivity-based asynchronous control for Markov jump systems. IEEE Trans Autom Control2017; 62: 2020–2025.
19.
XueMYanHCZhangH, et al. Hidden-Markov-model-based asynchronous H-infinity tracking control of fuzzy Markov jump systems. IEEE Trans Fuzzy Syst2020; 29: 878.
20.
WangSWuZG. Asynchronous control of uncertain Markov jump systems with actuator saturation. IEEE Trans Circuit Syst II: Express Briefs2022; 69: 3269–3273.
21.
WangXXMaYC. Observer-based finite-time asynchronous sliding mode control for Markov jump systems with time-varying delay. J Franklin Inst2022; 359: 5488–5511.
22.
HuTSLinZLChenBM. Analysis and design for discrete-time linear systems subject to actuator saturation. Syst Control Lett2002; 45: 97–112.
23.
CaoYYLinZLShamashY. Set invariance analysis and gain-scheduling control for LPV systems subject to actuator saturation. Syst Control Lett2002; 46: 137–151.
24.
PengSBoukasEKAgarwalRK. Control of Markovian jump discrete-time systems with norm bounded uncertainty and unknown delay. IEEE Trans Automat Control1999; 44: 2139–2144.
25.
LiuHBoukasEKSunF, et al. Controller design for Markov jumping systems subject to actuator saturation. Automatica2006; 42: 459–465.