
Abstract
The singular systems, which could widely describe more general systems and present traits of physical features, are discussed in this study. Taking the fact that noises always exist in the state and output measurement of one singular system into consideration, which may cause some errors and decrease system performance, this article devotes itself to the dissipative control for discrete-time singular Markov jump systems (SMJSs) with multiplicative noises. To deal with the asynchronous phenomena between the system modes and the controller modes, a set of Markov chains are constructed. To make sure the closed-loop singular system is dissipative, a set of sufficient conditions are derived based on the linear matrix inequalities, and then the asynchronous controller is designed to ensure that SMJSs are stochastically admissible and strictly dissipative. Finally, a simulation example is carried out to verify the correctness of the derived theorem. The designed asynchronous controller improves the robustness of the controller and overcomes the asynchronous phenomenon. This control method can be applied in the fields of robot control system.
Keywords
Introduction
Many dynamic systems subjected to abrupt change of environment and failure of system following the rule of Markov jump process, containing stochastic process and Markov chain-based constrained modes, are called Markov jump systems, which can be used to describe real systems with sudden change or modes switching among structure and parameters. According to the characteristics of the systems, Markov jump systems can be divided into two types including singular ones and nonsingular ones. Recently, the study of nonsingular ones is maturing, 1 –5 and the singular ones have been an attractive research topic for its wide application on diverse aspects about robot systems, control theory, fault tolerance, and nonlinear systems.
Singular systems, which also called descriptor systems, semistate systems or differential-algebraic systems, possess stronger capacity of maintaining system physical characteristics than nonsingular systems. Up to now, there are some related reports about singular systems,
6
–8
in which the detailed features of singular systems are presented. After analysis and summary, it is observed that the main and vital problem for singular systems is the stability, which is more complex than nonsingular systems due to the fact that the regularity and impulse elimination of the system need to be dealt. Thus, some researchers study the stability and admissibility of singular Markov jump system (SMJS).
9
–12
For SMJSs, the problem of regularity and stability is analyzed by Chvez-Fuentes et al.
9
In the study by Zhang et al.,
10
the slide mode control method is adopted to study the SMJSs. The admissibility performance is investigated by Gao et al.
11
for discrete-time SMJSs. For SMJSs with time-varying switchings, the problem of stabilization is researched by Wang et al.
12
In the study by Maand Zhang,
13
the
Dissipative theory is a systematic theoretical concept based on generalized system energy, which provides a more useful method for the stability analysis and controller design of dynamical system. Up to now, it has been applied in many fields such as control theory and system theory. With the consideration that the dissipative control is more representative, whose performance takes account of the advantages of both
In fact, the asynchronous phenomena between the system modes and the controller modes commonly exist in practical systems. For example, asynchronous phenomena usually occur in networked control systems, when the system mode could not follow the controller mode for the limited transmission capacity of the network systems. Therefore, the study of the issue of asynchronous control seems much more useful and meaningful. The issue of energy-to-peak state estimation for Markov jump RNNs was investigated by Zhang et al.
26
Zhanget al.
27
studied the asynchronous filtering problem of discrete-time switched linear systems with average dwell time. In the study by Wu et al.,
28
the problem of asynchronous
The parameter uncertainties are existing in many practical systems, such as fuzzy systems and nonlinear systems, which may affect the stability of systems. In this article, we consider the multiplicative noises as the source of the modeling uncertainties. However, research on dissipative control of singular systems with asynchronous phenomenon are scarcely reported. Therefore, it is vital and significative for us to design an asynchronous controller for discrete-time SMJSs with multiplicative noises. A little contribution is provided on dealing this issue, which motivates to carry forward this work. Nowadays, many control strategies are applied in robot systems, 31 –33 the controller designed in this article could be used in various of systems such as robot control, traffic control, and aircraft.
In this article, the asynchronous dissipative control for discrete-time SMJSs with multiplicative noises is investigated. Most researchers have studied the nonsingular systems, without loss of generality, the singular system will be investigated in this article. To deal with the asynchronous phenomenon, two correlated Markov chains are constructed to describe the asynchronous features between the system modes and the controller modes. Asynchronous controller is designed to ensure that the resulting closed-loop system is stochastically admissible and strictly dissipative. The main contributions of this article are as follows: The designed asynchronous controller is more representative than the synchronous one for the controller works asynchronously with the system mode. The singular systems is considered and dissipative control theory, which could reduce to The asynchronous dissipative state feedback controller is designed by given certain values for Q, S, and R and the simulation results illustrate the correctness of the derived dissipative conditions.
The rest of the article is organized as follows. The primary problems and some main Lemmas are stated in second section. The main results are derived in the third section, which provides sufficient conditions for stochastically admissible and strictly dissipative conditions. In the fourth section, an example is set to demonstrate the availability of the derived theorems. Conclusions are derived in the fifth section.
Notation
Throughout this article, the notations are standard.
Problem formulation
Considering the problem of designing an asynchronous controller for discrete-time SMJs with multiplicative noises, the state space equation is described as

where
Assumption 1
The state- and measurement-multiplicative noises are zero-mean sequences of independent random variables with variance equal to 1.
The set

for all
The finite set

for all
Remark 1
From the definition,
34,35
it can be obtained that for the same
For such a system, an asynchronous controller is designed as follows:

Remark 2
Obviously, when the set
From system (1), we can get that the noises existing in the state and measurement vectors are one-dimensional, so a linear transformation approach is used to deal with those noises.
Lemma 1
From the literature, 34 considering a random vector L, the linear transformation method is introduced as follows. Given a random n-vector T of the following form

where e is a n-vector and H is a
By Lemma 1, it is supposed that

where
Through the linear transformation, the following result is derived

where
To study the performance of stochastically admissible and strictly dissipative, the closed-loop system can be rewritten as

For notational simplicity, replacing

Definition 1
System (9) is regarded as regular, for any System (9) is regarded as causal, for any System (9) is called stochastically stable, if there exists a positive scalar

where System (9) is regarded as stochastically admissible, if the conditions 1–3 are satisfied.
To ensure that the discrete-time SMJs is strictly dissipative, the dissipative control theory is introduced as follows. Defining the energy supply function:

where
For any

system (8) under zero initial state condition with
Lemma 2
(Schur Complement) The following symmetric and constant matrices are given

where
Lemma 3
From the literature,
36
the matrices P, U, and V are known with compatible dimensions and
Main results
In this subsection, the two theorems are derived through dissipative control theory and linear matrix inequalities (LMIs) technique. In theorem 1, the sufficient condition of open-loop system with zero initial status is obtained. Then in theorem 2, an asynchronous state feedback controller is designed and the sufficient condition of closed-loop is derived to ensure the SMJs with multiplicative noises are stochastically admissible and strictly dissipative.
Theorem 1
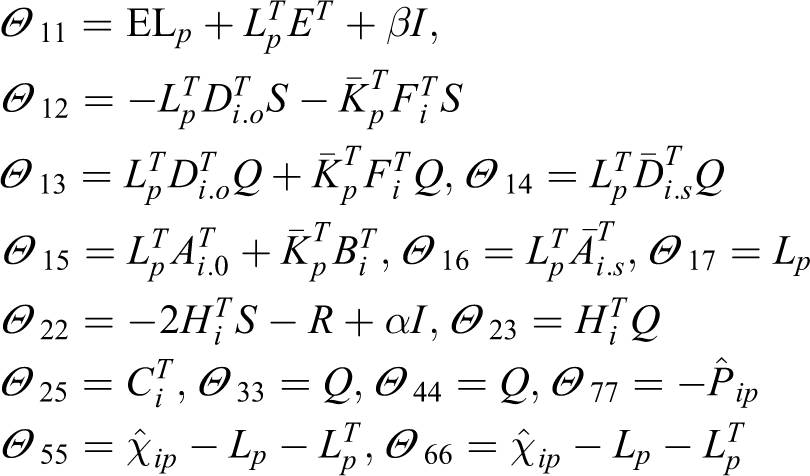
Giving the real matrices Q, S, and R, where Q is negative semidefinite matrix and R, S are symmetric matrices. System (8) under zero initial status with

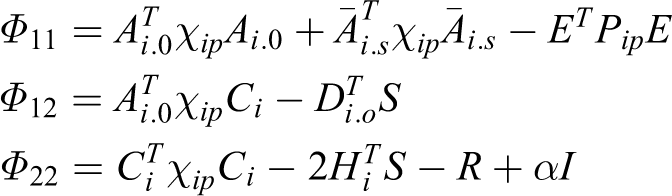
where

with
Proof
Firstly, the regular and casual of the closed-loop system should be proved. We know that

and
Giving positive definite matrix

where ∗ means that the matrix elements that we do not need. Obviously,
Considering the following Lyapunov function of system (8) with

Let

then

It can be found that

and

then

Considering the following performance index
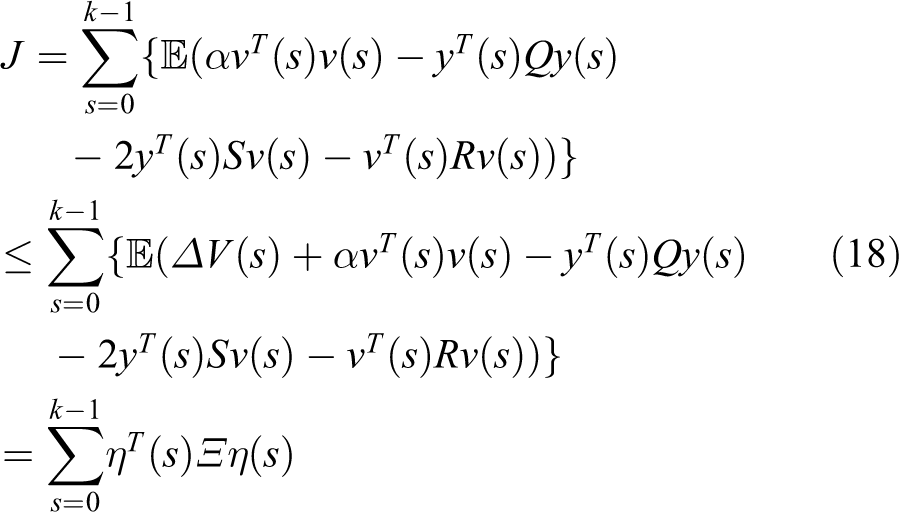
where


with
According to lemma 2
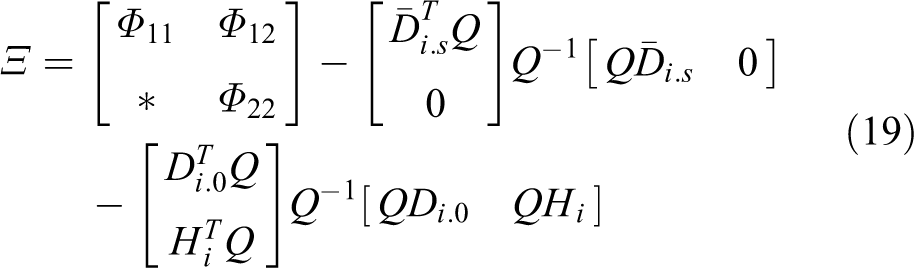
where
According to equation (19), under the condition that
Then the stochastically stable should be proved. We know that
Finally, the asynchronous state feedback controller is designed as

To investigate the stochastically admissible and strictly dissipative performance of closed-loop system (14), based on theorem 1, the following theorem can be obtained.
Theorem 2
Given the real matrices Q, S, and R, Q is negative semidefinite matrix and R and S are symmetric matrices. The asynchronous state feedback controller is designed as

where
Proof
We note
According to theorem 1, it is easy to get

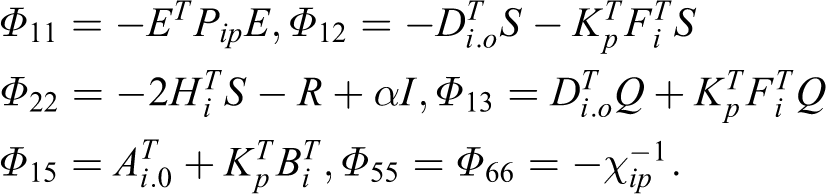
where
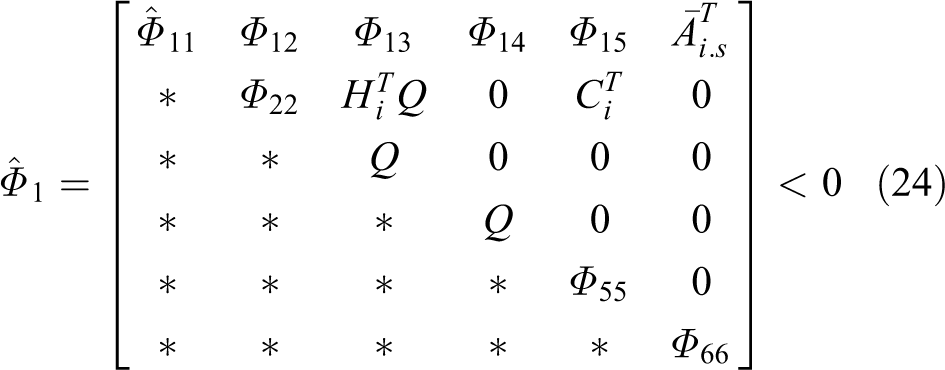
By lemma 2, the following inequality is derived.

where
By premultiplying and postmultiplying equation (23) via

As well, from

From lemma 3, there exists a scalar
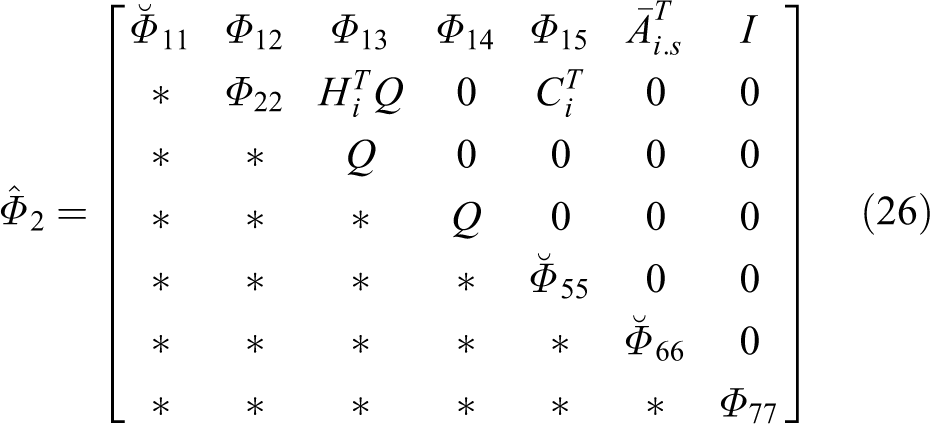
Premultiplying and postmultiplying equation (20) by
Remark 3
In theorem 2, the singular matrix E of closed-loop system can suddenly change with system modes. In practical plants, when system modes change, fast and slow subsystem of system always change. Such kind of model contains more general situations. Therefore, the singular system has more useful and general meaning in real applications.
An illustrative example
In this section, a simulation example is put to demonstrate the effectiveness of the derived theorems and designed asynchronous controller. Given the following parameters of the discrete-time SMJS as:

Considering the state- and measurement-multiplicative noises are one-dimensional, equation (6) is seen as the following equation
where

which implies that the asynchronous controller has two modes. The objective is to design an asynchronous controller for the above stated SMJS, such that the closed-loop system is stochastically admissible and strictly dissipative. By solving the LMIs feasibility problem in equation (21), the best value of t could be calculated as

Let the initial state of the system equals to be

The jumping process of Markov chains.
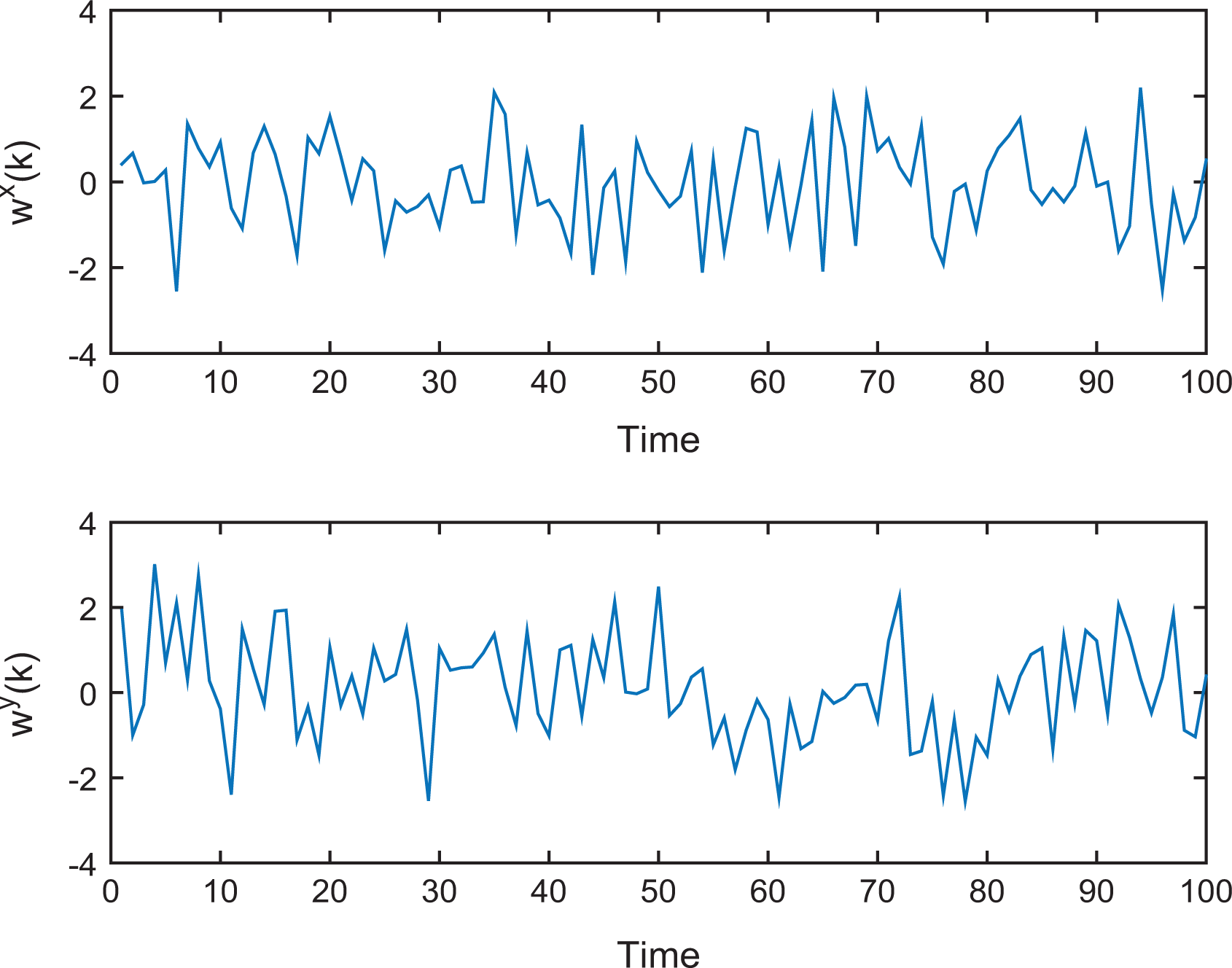
Multiplicative noises
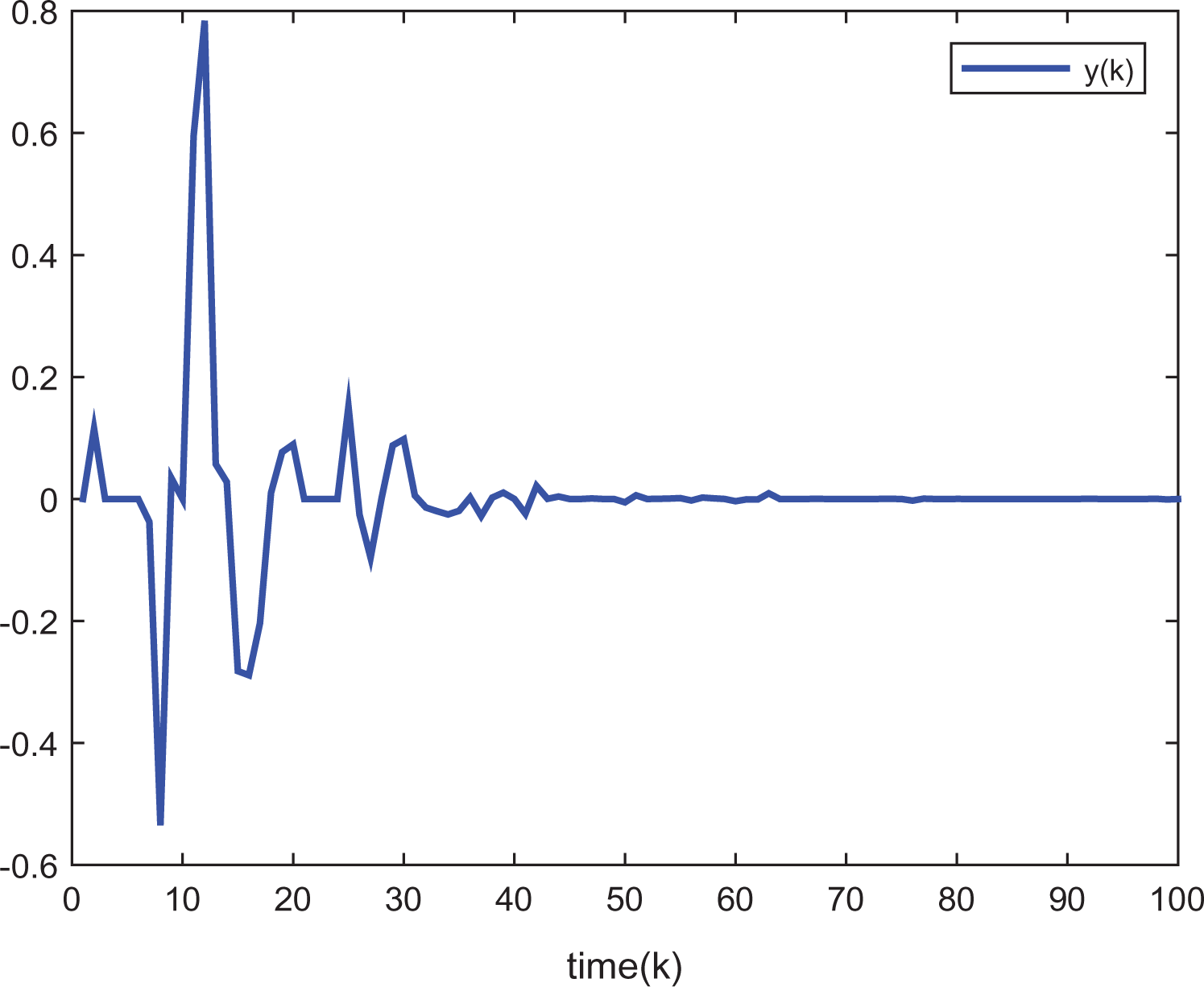
The trajectory of the controlled output.
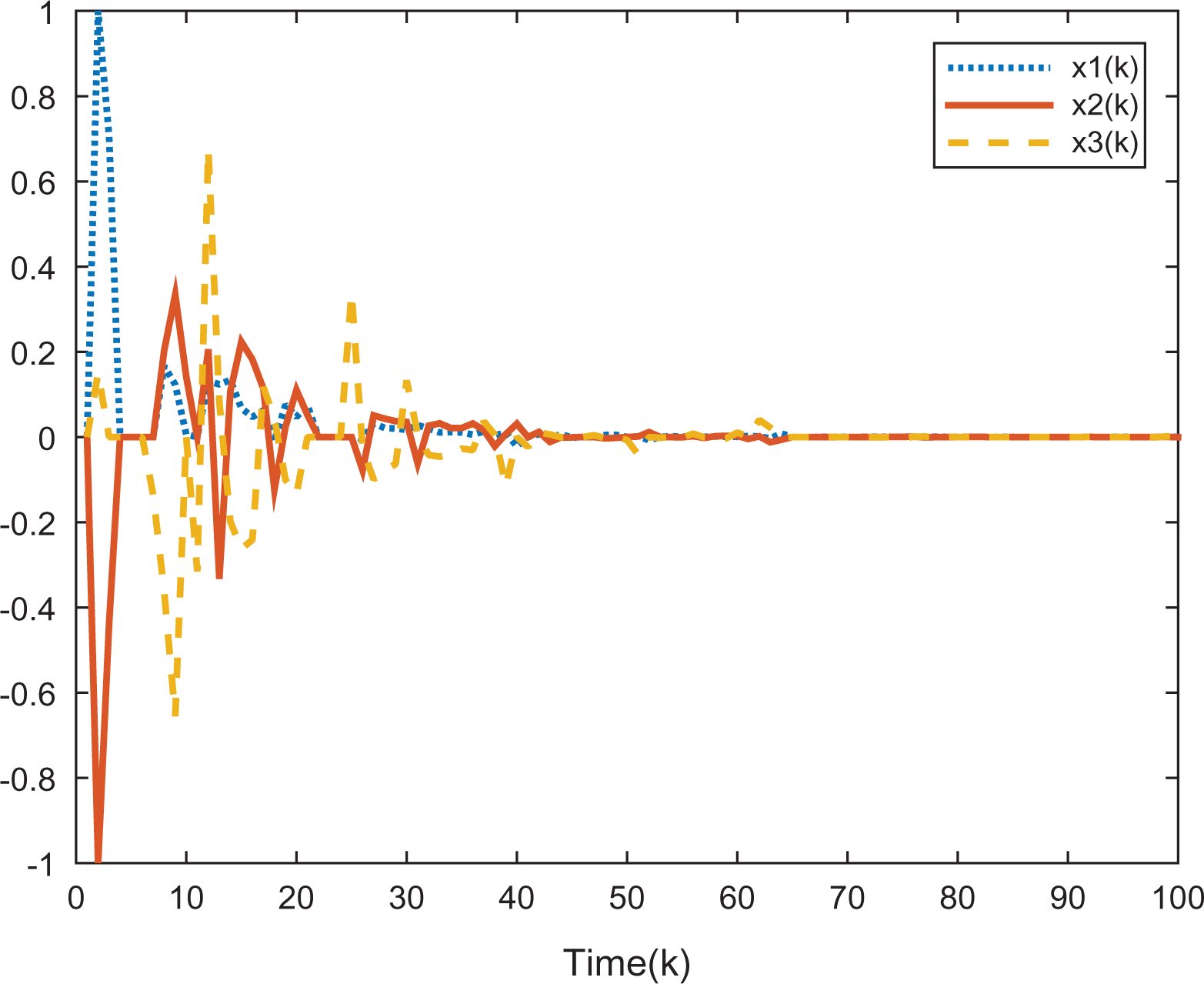
The trajectories of the system states.
To demonstrate the effective and correctness of the designed asynchronous controller, the designed controller is applied to study the problem of positioning in robot domain. Figure 5 shows the robot arm used in our experiments which has six degrees of freedom. To make the positioning results more intuitive, the checkerboard is chosen to get the corner position. In this experiment, the industrial camera is mounted on the flange at the end of the manipulator and the end piece is a mechanical device that can be precisely positioned. On PC, according to the information extracted from the industrial cameras, the designed control algorithm combined with the localization algorithm can calculated the control quantity in real time for the manipulator. The motion of the manipulator is controlled by the upper computer program to complete the positioning experiment. The location coordinates of the corners and the actual corners are extracted. The actual corner coordinates and the location of the corner coordinate information are displayed in

Six-axis manipulator.
In this experiment, eight corner points of known coordinates were selected with unit (mm). The designed controller algorithm is applied to the positioning experiment. The corresponding positioning results are shown in Figure 6, which exhibits the actual corner position coordinates and the location coordinates of corner position. From Figure 6, it is concluded that the designed asynchronous controller is effective and can be applied in robot domain.

Positioning result.
Conclusions
The problem of asynchronous dissipative control for singular discrete-time Markov jump system with multiplicative noises is investigated by Lyapunov function approach together with LMIs technique in this article. The asynchronous jumpings between system and controller modes are concerned, and the constructed Markov model efficiently model such jumpings. To reflect more practical plant, the state and output multiplicative noises are introduced and a linear transformation technique is applied to deal with these multiplicative noises. To overcome the problem that the controller modes are asynchronous to the system modes, the asynchronous dissipative controller has been proposed to improve the robustness of the controller. The sufficient conditions are given which guarantee the closed-loop system is stochastically admissible and strictly dissipative. Meanwhile, an example is taken, and simulation results verify the correctness of the derived theorems and designed controller. The control method proposed in this article can be used in the area of robot control and traffic control. It should be pointed out that our future research topics would be asynchronous dissipative control for more complex systems. For example, time delays including random delay, randomly occurring unideal measurements, system with partial transition probabilities and so on. What’s more, the mainly direction of our research is to use the Markov jump systems with dissipative control theory to study the related issues of robot arm systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61773245, 61603068, 61806113, 61503224, 61473177), Shandong Province Natural Science Foundation (ZR2018ZC0436, ZR2018PF011, ZR2018BF020), Key Research and Development Program of Shandong Province (2018GGX101053), Scientific Research Foundation of Shandong University of Science and Technology for Recruited Talents (2017RCJJ061, 2017RCJJ062, 2017RCJJ063), and Taishan Scholarship Construction Engineering.