
Abstract
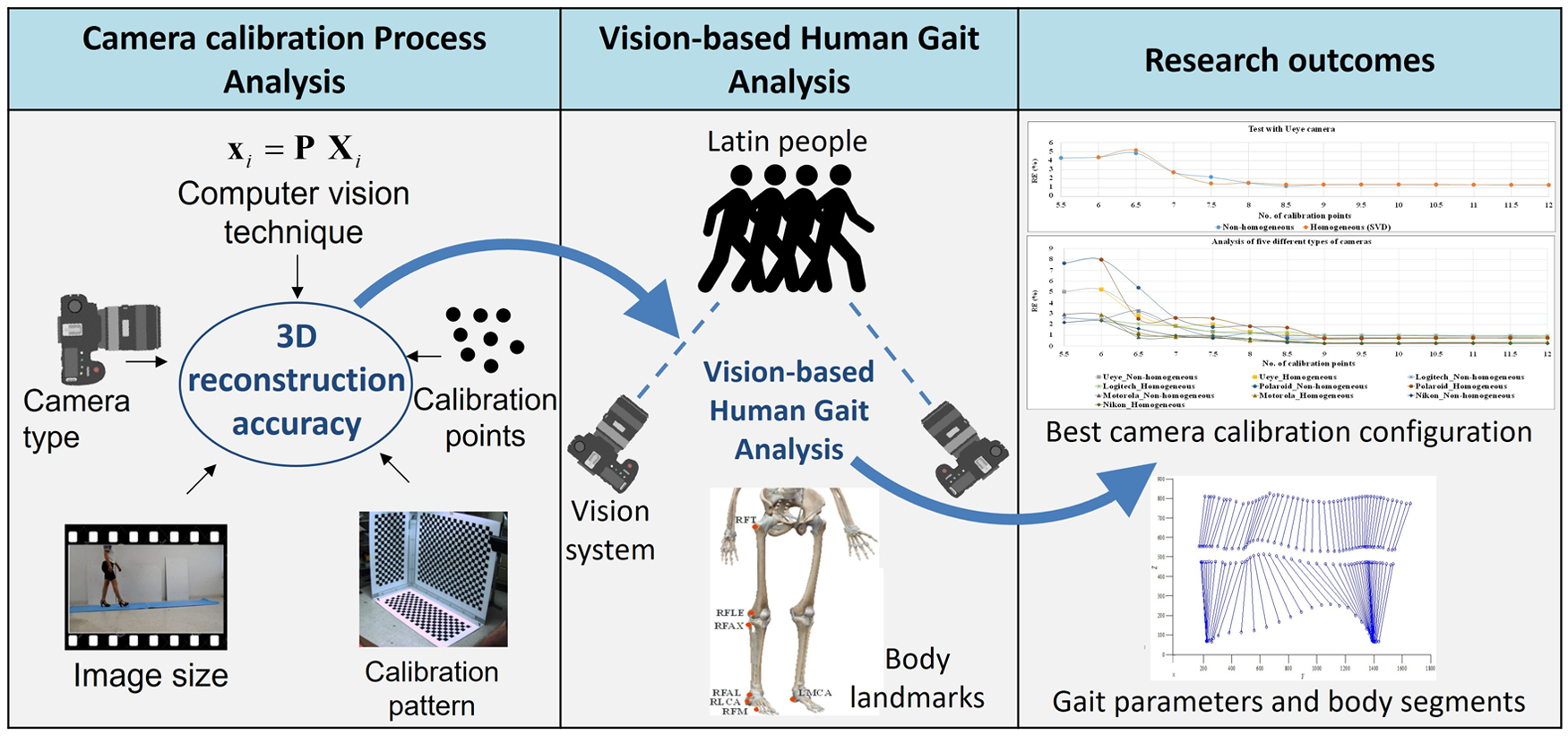
The camera calibration process (CCP) is an essential procedure in computer vision techniques (CVT) affecting the 3D reconstruction accuracy as it involves computing the parameters needed to determine 3D information from 2D images. The CCP performance depends on the model used to approximate the camera behavior, and on the intrinsic and extrinsic conditions used. Inadequate CCP conditions may result in large 3D reconstruction errors. Although in human gait analysis (HGA) applications some works have focused on studying the influence of CCP conditions on the reconstruction accuracy, there is a lack of methodological guidelines on optimal calibration conditions. In order to bridge this research gap, in this paper an investigation to evaluate the influence of the CCP conditions, such as the number of calibration points, camera type, image size and calibration pattern size, on the accuracy of 3D reconstruction for HGA, is presented. A linear CVT based on the Direct Linear Transformation (DLT) algorithm was selected. The results have shown that the 3D reconstruction accuracy increases with the number of calibration points, the quality of the cameras, the image size and the calibration pattern size. Adequate reconstruction errors for HGA (smaller than 1%) can be obtained when using the homogeneous CVT, 24 calibration points, conventional cameras, image size of 1280 pixels × 1024 pixels, and a large calibration pattern (1.2 m × 0.7 m × 1.0 m). This CVT and CCP conditions can be obtained with relatively low-cost equipment, making it attractive for clinical use in low-income countries.
Keywords
Get full access to this article
View all access options for this article.