
Abstract
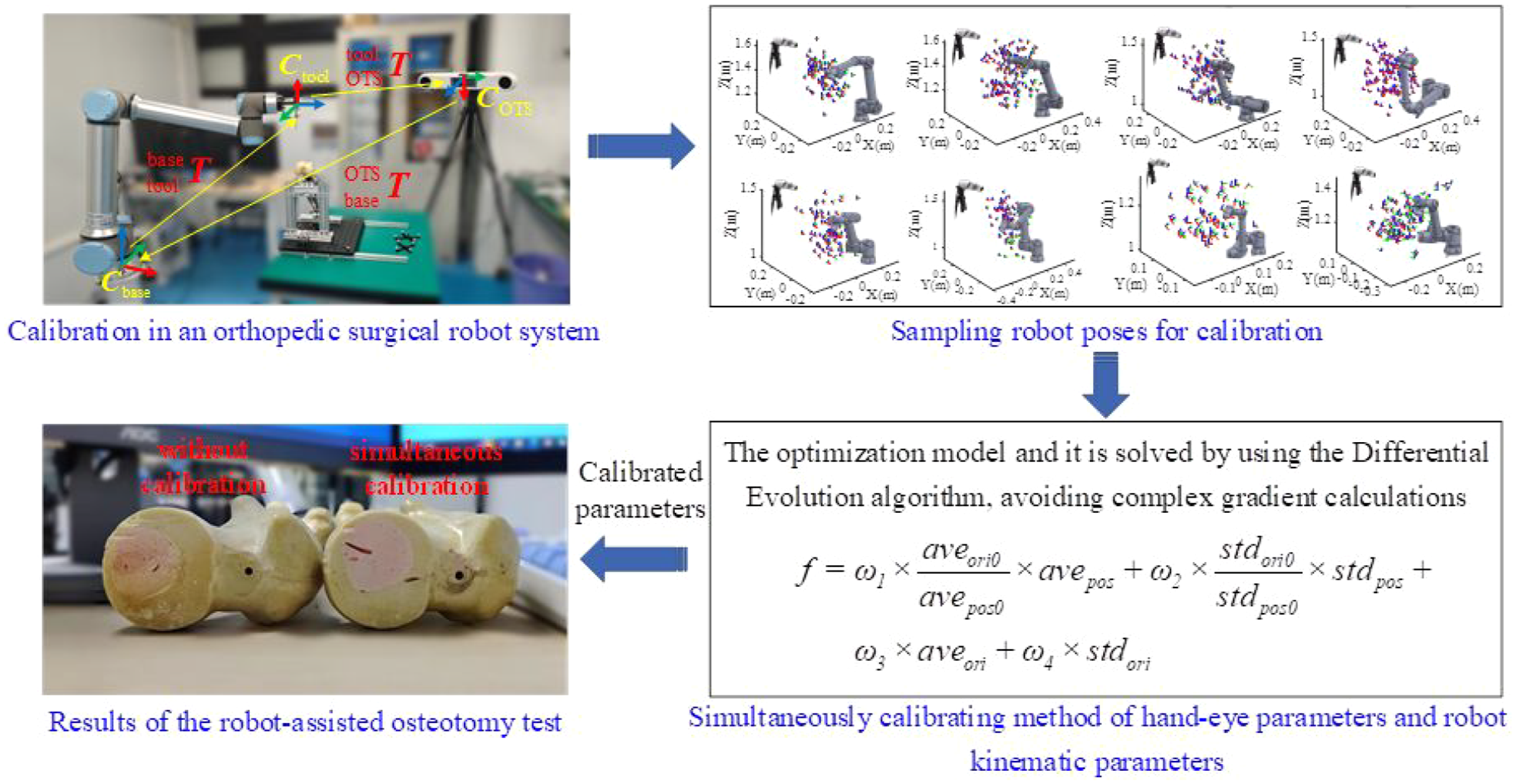
Orthopedic surgical robot systems increasingly demand high-precision positioning and orientation. Low accuracy of positioning and orientation is a potential hazard during a surgery and also affects the surgical quality. The transformation relationship between the robot base coordinate system and the optical tracking system, which is called hand-eye calibration, is supposed to be calibrated accurately preoperatively. The hand-eye parameters identification is inevitably affected by the errors of robot kinematic parameters. Errors in robot kinematic parameters and hand-eye parameters significantly influence the accuracy of an orthopedic surgical robot system. To enhance the calibration accuracy, a simultaneous precise calibration method of the robot’s kinematic parameters and hand-eye parameters for orthopedic surgical robot systems is proposed, eliminating the error accumulation caused by a step-by-step calibration procedure of hand-eye parameters and kinematic parameters. The objective function of the proposed simultaneous calibration method is defined as the weighted sum of the averages and variances of the positioning and orientation errors of the robot’s end-effector, ensuring the difference between the errors of the robot poses after parameters calibration in its work space is small, and it is solved by using the Differential Evolution algorithm, avoiding complex gradient calculations. The proposed calibration method is verified by experiments, and a robot-assisted osteotomy experiment is also conducted to demonstrate the accuracy and effectiveness of the proposed calibration method.
Get full access to this article
View all access options for this article.