
Abstract
Recently, the concept of incremental nonlinear dynamic inversion has seen an increasing adoption as an attitude control method for a variety of aircraft configurations. The reasons for this are good stability and robustness properties, moderate computation requirements and low requirements on modelling fidelity. While previous work investigated the robust stability properties of incremental nonlinear dynamic inversion, the actual closed-loop performance may degrade severely in the face of model uncertainty. We address this issue by first analysing the effects of modelling errors on the closed-loop performance by observing the movement of the system poles. Based on this, we analyse the neccessary modelling fidelity and propose simple modelling methods for the usual actuators found on small-scale electric aircraft. Finally, we analyse the actuator models using (flight) test data where possible.
Introduction
Incremental nonlinear dynamic inversion (INDI) has been applied to a variety of aircraft including quadrotors, hybrid aircraft (tailsitter, tiltwing) and conventional airplanes.1–4 In comparison to classical control techniques, its benefits lie in the achievable level of robustness and performance, the ease of controller tuning and the economical implementation aspects. The method was first introduced by NASA
5
and then further developed at TU Delft.1,2 At the core of INDI, a simple control law given by

Effects of modelling uncertainty
The goal of nonlinear dynamic inversion (NDI) is to invert the plant dynamics so that the resulting closed-loop dynamics are a series of integrators. In principle, the INDI formulation in Smeur et al.
2
shares this goal. However, due to the way in which state-derivatives (i. e. angular accelerations) are calculated, the resulting closed-loop dynamics from the commanded angular accelerations ν to the actual angular accelerations
To analyse this, we assume an INDI-based angular rate controller, as shown in Figure 1. For simplicity, we only analyse the single-input single-output case but expect the results to be transferable in principle to the multiple-input multiple-output case as well. The parameters of the system consist of the plant parameters – namely, the control effectivity


Controller structure.
In the nominal case,
Poles of the INDI controller
In the nominal case, the closed-loop transfer function from the commanded angular accelerations ν to the actual angular accelerations
Figure 2 shows the movement of the poles of the INDI loop, when the control effectivity Mu is incorrect. In the nominal case (left), the poles of the filter H are completely cancelled and thus do not influence the closed-loop dynamics. Only the poles of the actuator dynamics A remain. We selected the filter parameters of H as follows
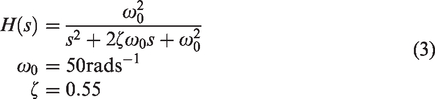
Effect of uncertainty in control effectivity on significant poles of INDI loop,
For
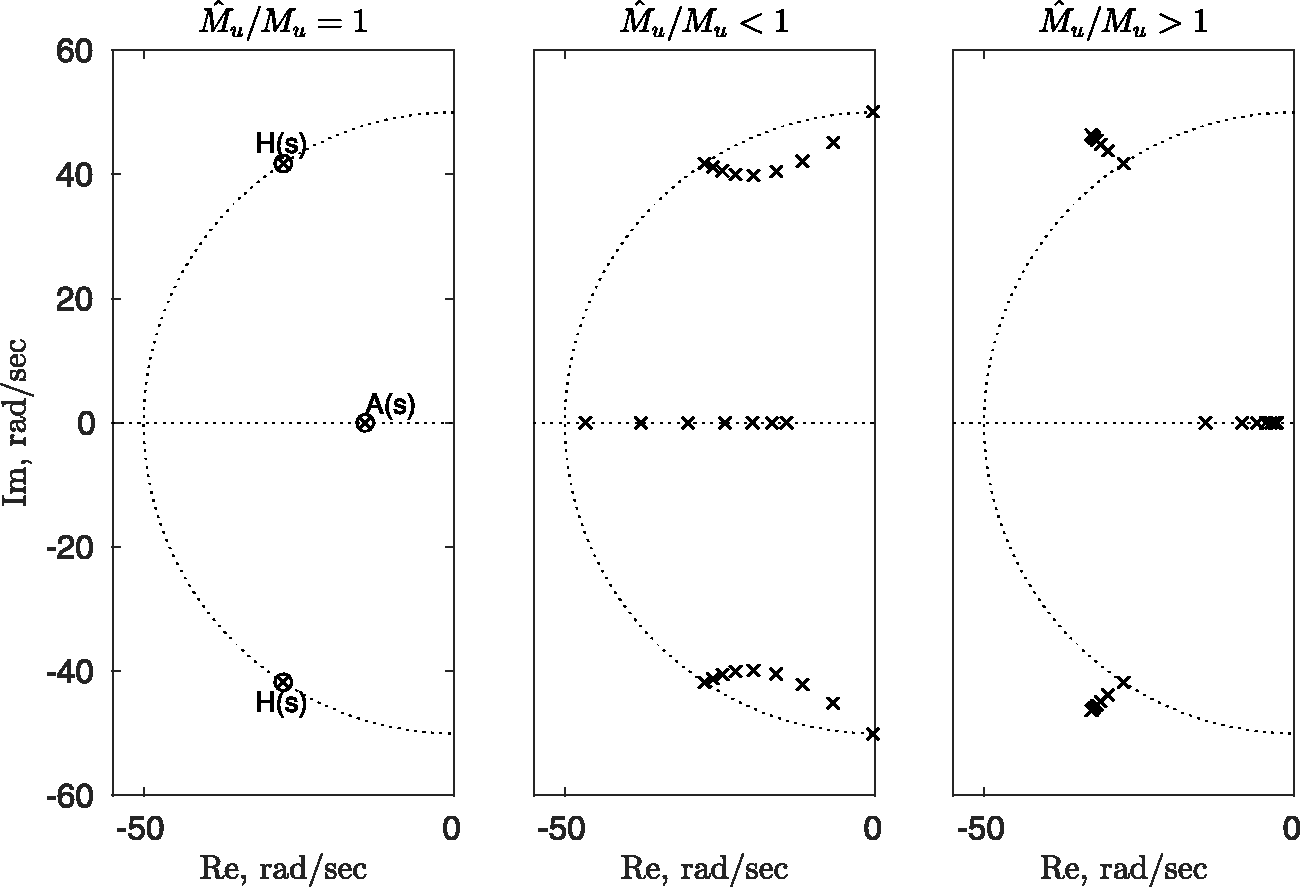
Figure 3 shows a similar analysis as before, this time changing the assumed actuator dynamics
Effect of uncertainty in actuator dynamics on significant poles of INDI loop,
Finally, Figure 4 shows a similar analysis for the effect of uncertainty in the time delay

Effect of uncertainty in actuator delay on significant poles of INDI loop (sample time
In summary, this analysis gives some insight into the behaviour of INDI in case of uncertainty. In our experience, a common problem when implementing INDI for a new aircraft are oscillations. Based on the discussion above, observing the frequency of the oscillations can give a hint as to what the source of the oscillations is. Appropriate mitigations can either be to adapt the assumed model (
Actuator models
Small electric aircraft typically features two kinds of actuators: rudders and electric motors with propellers to produce thrust. Depending on the configuration, the rudders might additionally be positioned in the slip-stream of the propellers. This configuration is often used to create rudder effectivity even when there is no aerodynamic velocity (e.g. flying-wings, tiltwing aircraft).
To model the effectivity of these actuators, we propose a two-step approach: First, we calculate the thrust, slip-stream velocity and effectivity of the motors. Second, we calculate the effectivity of the rudders, taking into acount slip-stream velocities if neccessary.
In addition to these static actuator model properties, we also model the dynamic behaviour of the actuators. This is of course only strictly necessary, when the actuator positions are not measured. Still, for designing the outer rate and attitude controllers, an estimate of the actuator dynamics is beneficial.
For both the static and dynamic properties, we rely as much as possible on properties which are either easily measurable or specified by the manufacturers. In ‘Analysis’ section, we analyse how well these actuator models actually perform and how this compares to the requirements on modelling fidelity derived in ‘Effects of modelling uncertainty’ section.
Static actuator effectivity models
Within the scope of attitude control, the actuator effectivity describes the change in moments due to changes in actuator position (i.e. rudder deflection or throttle). For many applications, it is sufficient to look at the force induced by an actuator and use the corresponding lever to calculate the induced moment. We thus get expressions of the form

Motors
The most common type of electric motor used in electric aircraft is the synchronous AC motor. It needs to be driven by a specialised electronic component called an electronic speed controller (ESC), see Figure 5. An ESC is controlled via a throttle value δ, which can typically be normalised to ranges from 0 to 1 (or −1 to 1, if the ESC supports driving the motor in reverse). The ESC generates the appropriate voltages to drive the motor, resulting in an angular velocity measured as revolutions per minute (RPM) n. Depending on the propeller and inflow conditions, these angular velocities then result in a thrust F. This description makes the simplifying assumption that the angular velocity is independent of the inflow. It thus enables using a simpler model at the cost of modelling fidelity.

Motor model. ESC: electronic speed controller; BLDC: Brushless Direct-Current Electric Motor .
The motor model we propose consists of two parts: a mapping from the throttle δ and the supply voltage U of the ESC to the RPM n and a mapping from n combined with the inflow Va to the thrust F.
ESC/Brushless Direct-Current Electric Motor (BLDC) model
When the motor RPM are not measured, we use the following model based on the supply voltage U, the motor speed constant KV and the throttle setting δ

This model basically assumes that the motor is in a no-load condition, which is a very crude approximation. The advantage is, however, that only the parameter KV needs to be known, which is usually specified by the motor manufacturer.
Propeller model
For small electric aircraft, a database of measured propeller performance exists.
9
Also some manufacturers provide additional performance preditictions
10
based on analytical methods. To model the propeller thrust, we first calculate the static thrust produced at zero inflow speed and then correct this value using an estimate of the current inflow speed. We model the static thrust as

The value of K1 can either be derived using one of the previously mentioned propeller databases, from simple test setups or from previously acquired flight data.
To correct for the inflow velocity, we add a correction term, resulting in


This choice of correction term is informed by the propeller data displayed in Figure 6. Figure 6 shows the thrust produced by a propeller
1
at different axial velocities and at different RPM. For the relevant inflow speeds (

Thrust over axial velocity.
As a first approximation, K2 can also be interpolated from available propeller performance data. The performance database published in APC Propeller Performance Data
10
was calculated using blade element momentum theory. While here the parameter K1 is consistently overestimated, the parameter K2 matches the measured data published in Brandt et al.
9
well. The data suggest that K2 can be approximated as a function of the propeller diameter D and the propeller pitch S


Since the UIUC database 9 features a wide range of different propeller types and manufacturers, we expect that the corresponding model will extrapolate well to new propellers.
Rudders
We approximate rudders as thin plates, where the rudder effectivity is given by


Dynamic actuator models
For dynamic actuator models, we use first-order lags with time delay and optional rate limit, which is a common approach found in the literature.2,3Figure 7 shows the corresponding block diagram. The actuator time constant T and the rate limit (denoted as

Actuator model.
Analysis
In this section, we analyse the accuracy of the previously described models. Where possible, we validate the models using measured data from flight tests or other test setups. We already presented the rudder model presented here in previous work. 4 Determining the fidelity of the model would require dedicated wind-tunnel testing which was beyond the scope of this work. We thus do not discuss the rudder effectivity model in the following analysis.
Motor model
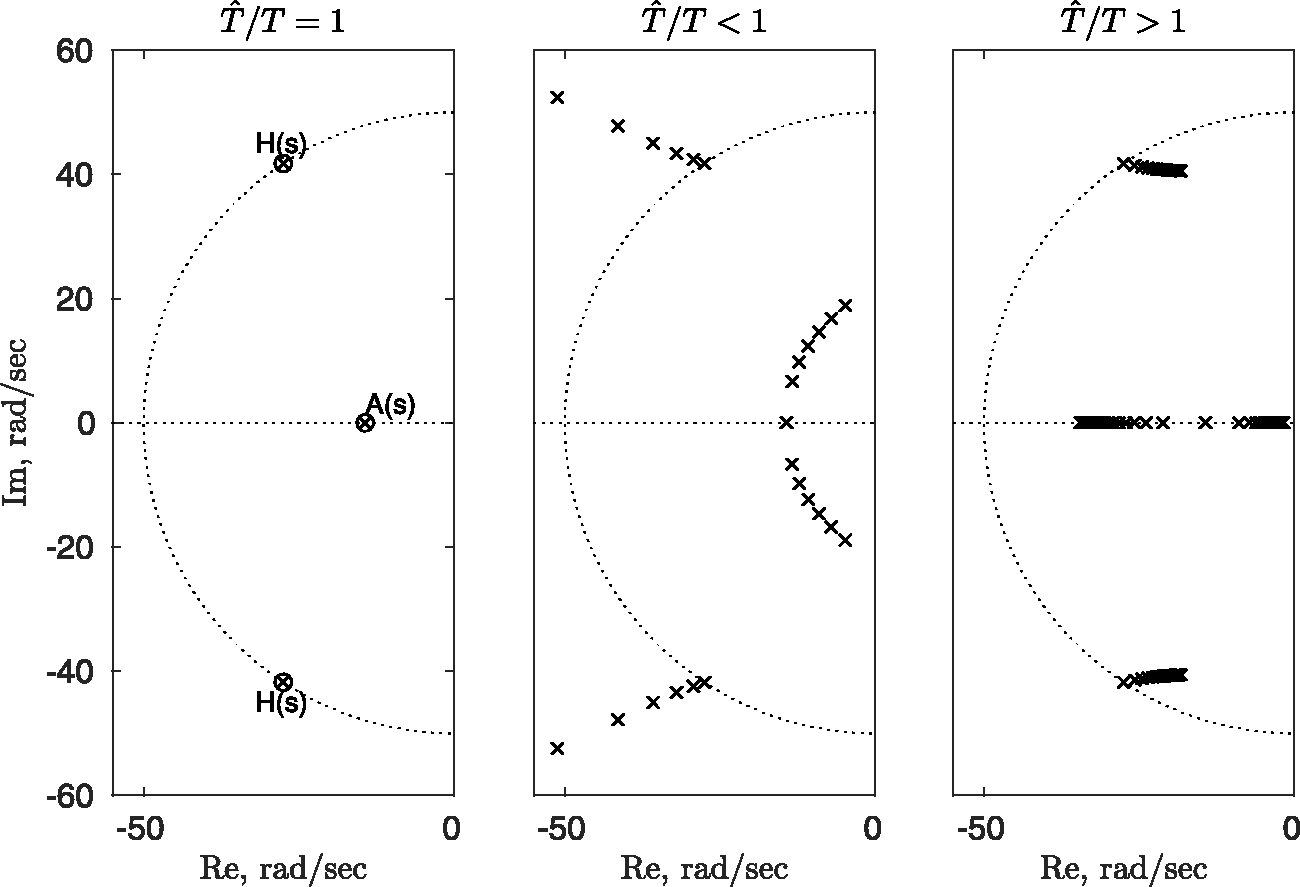
The motor model consists of two parts: the ESC/BLDC model and the propeller model. To validate the ESC/BLDC model, we analysed flight test data of a tiltwing aircraft, where the RPM were measured. Figure 8 shows a comparison of the predicted RPM and the measured RPM. As mentioned previously, the ESC/BLDC model assumes a no-load condition, which naturally does not reflect the actual flight conditions. Thus, using the KV value specified by the manufacturer will always result in an overestimation of the RPM. The relative error between the expected RPM
BLDC/ESC model. RPM: revolutions per minute.
The propeller model (8) consists of two constants K1 and K2. We assume that K1 can be accurately determined from the static motor model (6). K2, however, has to be either measured in wind-tunnel tests or determined using analytical methods. The approximation of K2 as a function of the propeller diameter and propeller pitch given in equation (9) can be used as a first approximation if no other data are available. It is, however, not clear if over- or underestimation occurs. In our experience, K2 only becomes significant at high airspeeds, at which point the rudder effectivity usually is high enough for the rudders to act as the primary control surface.
In summary, we expect the motor model to be sufficiently accurate with a tendency to overestimate the propeller effectivity. Thus, reffering to Figure 2, this should result in fully damped system dynamics.
Dynamic actuator model
The rate-limited first-order lag model used to model servo motors has three parameters: the rate limit

Servo dynamics at high frequencies.
Figure 10 shows an example Bode plot obtained by running the test displayed in Figure 9 for many different frequencies. It is clear that a low-order linear servo model cannot capture the magnitude and phase behaviour of the nonlinear servo model. The sharp edge in the magnitude plot is related to the nonlinear effects of the rate limit. The time constant T of the servo actually has little impact on the overall modelling accuracy. How and if this actuator model should influence the design of outer loop controllers still needs to be investigated. As a comparison, Figure 10 also shows an approximation of the nonlinear servo model using a first-order lag, where the time constant is chosen such that it matches the edge frequency of the nonlinear servo model. In terms of designing outer loop controllers, such an approximation might serve as a useful abstraction of the nonlinear dynamic model to still allow the application of linear control methods.

Bode plot of servo dynamics.
In summary, the actuator models presented here are able to capture the dynamic behaviour of the real actuators well. In case of electric motors, simple linear models seem to sufficiently capture the relevant dynamics. In the case of servo motors, the model parameters are hard to derive based on the typical manufacturer specifications. To apply the analysis summarised in Figure 3, suitable alternative (linear) actuator models need to be derived.
Results
The previously described models were used to model the actuators of a small tiltwing aircraft (wingspan

Tiltwing aircraft.
In the nominal case, it can be shown
2
that the dynamics of the closed INDI control loop from the commanded angular accelerations 

If the actuator dynamics A(z) are modelled correctly,
Figure 12 shows the results of a hover flight with the example tiltwing aircraft (see Figure 11) and the previously described actuator models. It is clear that the expected behaviour, namely, the relevant actuator dynamics A(z), is achieved by the controller. Errors in the actuator effectivity would directly result in a damping or amplification of the actual accelerations

Performance of angular acceleration control loop.
On top of these closed-loop dynamics of the angular accelerations, simple proportional-derivative control can achieve a satisfactory attitude controller performance (as described in previous work 4 ). In particular, no further gain scheduling is needed in the outer control loops for the example aircraft. Figure 13 shows the attitude controller performance (here reduced to roll- and pitch angle) over the entire flight envelope of the example tiltwing aircraft. Since the attitude controller is built on top of the angular acceleration controller, this shows that the chosen modelling approach is effective in achieving the required fidelity.
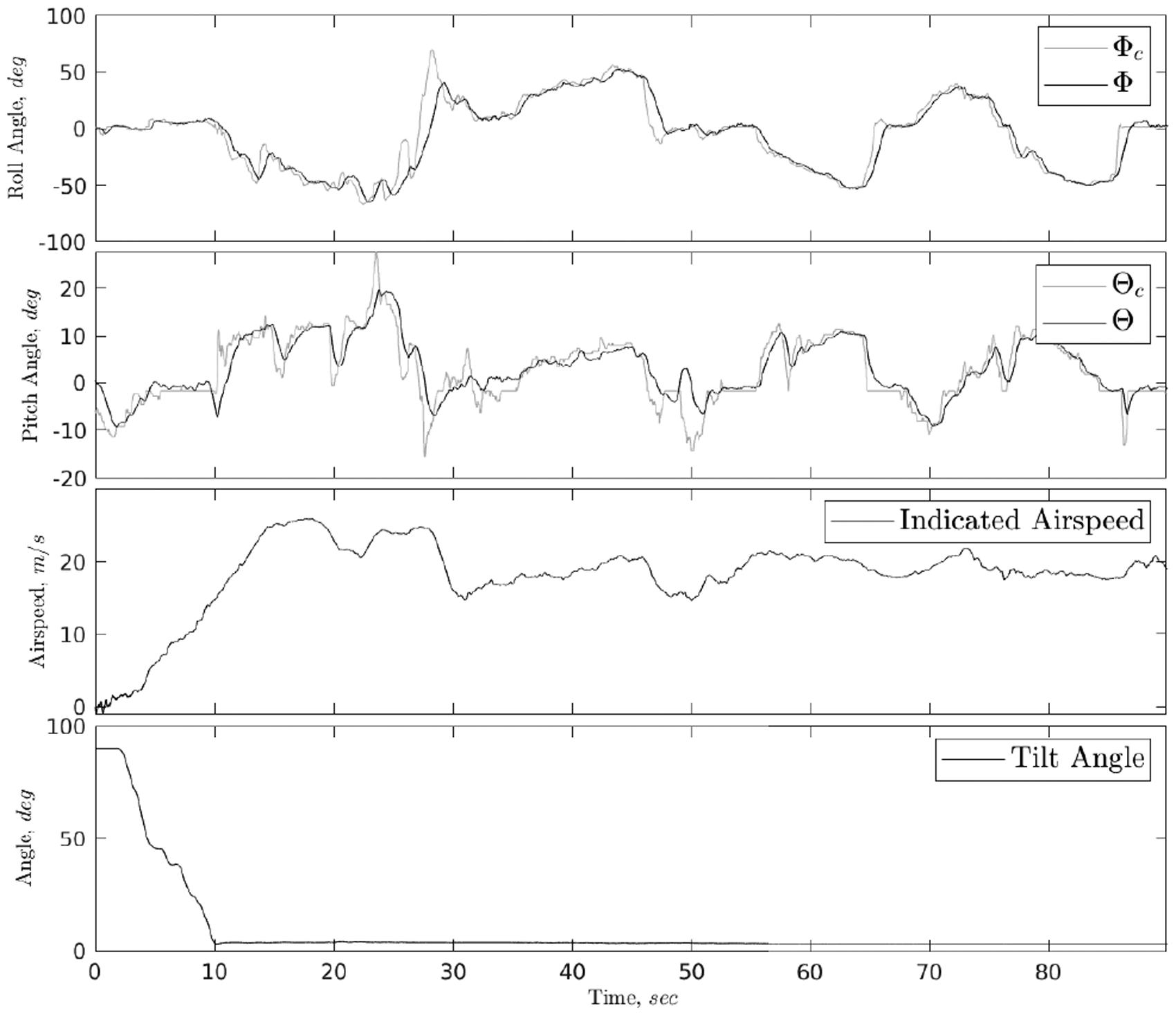
Performance of attitude control loop.
Conclusion
This paper presented our approach to modelling actuators for use in the framework of INDI. First, by studying the effects of modelling uncertainty on the poles of the closed-loop system, the robustness properties of INDI controllers were analysed. We confirmed the known stability properties of INDI but found that the uncertainty bounds of acceptable closed-loop performance are (of course) much tighter. With that in mind, we then considered the typical actuator elements found in small electric aircraft, namely, electric motors with propellers and rudders actuated by servo motors. We derived suitable models for these elements, trying to rely as much as possible and easily obtainable information.
In the following analysis, we assessed the resulting model fidelity using real flight data or measurements where possible. Special consideration was given to typical servo models, which feature a nonlinear rate-limit element. We discussed some effects of this nonlinearity, though further works needs to investigate how and if these nonlinearities should be considered in the design of outer loop controllers. Finally, flight test results could confirm that the chosen modelling approach is effective in achieving satisfactory attitude controller performance for an example tiltwing aircraft.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Note
a. APC 10x3.8 Slow Fly.