
Abstract
It is widely recognized that the accuracy of explicit finite element simulations is sensitive to the choice of interface parameters (i.e. contact stiffness/damping, mesh generation, etc.) and time step sizes. Yet, the effect of these interface parameters on the explicit finite element based solutions of wheel–rail interaction has not been discussed sufficiently in literature. In this paper, the relation between interface parameters and the accuracy of contact solutions is studied. It shows that the wrong choice of these parameters, such as too high/low contact stiffness, coarse mesh, or wrong combination of them, can negatively affect the solution of wheel–rail interactions which manifest in the amplification of contact forces and/or inaccurate contact responses (here called “contact instability”). The phenomena of “contact (in)stabilities” are studied using an explicit finite element model of a wheel rolling over a rail. The accuracy of contact solutions is assessed by analyzing the area of contact patches and the distribution of normal pressure. Also, the guidelines for selections of optimum interface parameters, which guarantee the contact stability and therefore provide an accurate solution, are proposed. The effectiveness of the selected interface parameters is demonstrated through a series of simulations. The results of these simulations are presented and discussed.
Keywords
Introduction
When performing contact analysis, all contact forces have to be distributed over a priori unknown area in contact. The contact pressure is another primary unknown in such a problem that has to be determined. To estimate these unknowns accurately, extensive research efforts have been made in the field of contact mechanics since the pioneering work of Hertz. 1 A number of analytical and/or semi-analytical contact solutions, such as Hertzian, 1 non-Hertzian,2,3 multi-Hertzian contact models, 4 etc., have been developed and reported.5–7 These approaches have been verified and/or validated to be effective and efficient enough for addressing the problems of wheel–rail (W/R) contact in elasticity as well as in the cases of quasi-static and/or low-frequency dynamics.2,8–12 Regarding the complex problems with both realistic contact geometries and material plasticity considered, finite element (FE) method, as opposed to the aforementioned approaches, appears to be much preferable and powerful for ensuring the desired solutions.
Generally, two basic methods are used in FE programs to enforce the contact constraints, namely the Lagrange multiplier method13,14 and the penalty method.15–18 Due to the easy implementation, the penalty method has been always the first choice to be integrated in the explicit FE software (e.g. ANSYS LS-DYNA 18 ), where the central difference method is commonly used to perform the time integration.
With the rapid development of computer power and computing techniques, many representative three-dimensional (3D) explicit FE models19–22 have been created to fulfill different engineering purposes. For instance, Zhao and Li 19 developed an explicit FE model to study the behavior of W/R frictional rolling contact. The results of verification against CONTACT3,5 showed that the FE model presented was promising enough to be used in the future work. As a further application of that model presented in Zhao and Li, 19 Zhao et al. 22 assessed the performance of W/R frictional rolling contact in the presence of rail contaminants. It was reported that contact surface damages such as wheel flats and rail burns might be caused by the presence of contaminants. Vo et al. 20 assessed the stress–strain responses of W/R interaction under high and low adhesion levels. It was found that the adhesion conditions were highly related to the level of damages (RCF damage, corrugation, etc.) on the rail surface. Pletz et al. 21 introduced a dynamic wheel/crossing FE model to quantify the influence of the operational parameters such as axle loads, train speeds, etc., on the impact phenomena. It was found that the contact pressure and the micro-slip were critical variables responsible for the surface damage of crossing rail. More recent modeling advances of W/R interaction, including the development of implicit FE models11,12,23 (i.e. not referenced but of equal importance as those explicit FE models), can be found in Meymand et al. 7 and Ma et al. 24
In summary, significant progress in the analyses of W/R interaction using explicit FE tools has been made. However, the issue of selecting good (if not optimum) interface parameters, 15 as the essence of penalty-type methods, 25 has not been studied sufficiently. Also, the resulting phenomena of “contact instabilities” from the improperly chosen interface parameters have not been discussed adequately. Here, the phenomenon of “contact instability” is referred to as a numerical problem of dynamic contact stability and has no physical correspondence. Detailed explanations of “contact (in)stability” are given in the later sections. The term of “interface parameters” is referred to as the key variables such as contact stiffness and damping that, if changed or varied, influence the entire operation of W/R dynamic interaction system. “Optimum” refers to the “interface parameters” employed that result in acceptable interface compatibility and maintains numerical contact stability. 26
Up until now, only a few general guidelines15,18,27–29 are available for making the choice of good interface parameters. For example, Huněk 15 proposed that an appropriate value of contact stiffness (also called penalty stiffness) can be made considering the penalty stiffness comparable to the normal stiffness of the interface elements. Similarly, Goudreau and Hallquist18,28 suggested the contact stiffness to be approximately of the same order of magnitude as the stiffness of the elements normal to the contact interface. Belytschko and Neal 27 presented the upper bounds on the contact force in explicit calculations and showed the effect of the contact stiffness on the stable time step. 15 Pifko et al. 29 introduced a coefficient of contact damping to suppress the high-frequency oscillations.
Although those general guidelines are relatively helpful for identifying good interface parameters, it is widely recognized14,15,25,26,30 that there are no universally applicable rules/guidelines for particular problems considered. Regarding the specific problem of W/R rolling contact, more research attention to the importance of interface parameters has to be drawn. The motivation of this study is thus summarized as follows:
To ensure accurate solutions of W/R interaction: Considering that the penalty methods enforce contact constraints approximately, the solution accuracy depends strongly on the interface parameters selected.
14
A set of arbitrary chosen interface parameters on the risk of being underestimated or overestimated may easily cause an unexpected or inaccurate solution from FE simulations. To formulate clear guidelines for good W/R interface parameters: The choice of interface parameters can affect not only the accuracy of contact solutions, but also the stability of explicit FE time integration (i.e. central difference method is conditionally stable).25,26 Thus, well-demonstrated guidelines are in high demand to address the problems of contact instabilities and to maintain the solution accuracy.
To carry out the study on the problems of contact (in)stabilities, an explicit FE model of a wheel rolling over a rail is used. The model adopted is developed in ANSYS LS-DYNA. 18 To improve the performance of FE simulations on W/R interaction, 24 a novel adaptive mesh refinement procedure based on the 2D geometrical contact analysis is introduced. Also, the accuracy of that model has been successfully verified 31 against CONTACT, which is a rigorous and well-established computational program developed by Professor Kalker 5 and powered by VORtech Computing. 3 The modeling strategy proposed 24 has been further extended to study the dynamic impact between wheel and crossing. 32
In this paper, the attention is focused on a comprehensive study on the relation among the choice of interface parameters, the accuracy of contact solutions, and the numerical contact stability. The outline of this paper is as follows. A brief introduction of the explicit FE model developed for the analysis of W/R interaction is presented first. Next section is concentrated on the theoretical background of the FE algorithms to better understand the physics of contact problems before attempting to solve it. Also, the challenges and approaches for maintaining contact stabilities are illustrated. Then, the influence of interface parameters on the computational accuracy and contact stabilities is studied and discussed. Finally, concluding remarks are drawn.
W/R 3D-FE model
In this section, the FE model for the analysis of W/R interaction is presented. The model is shown in Figure 1(a) to (f). The two counterparts investigated here are the standard S1002 wheel and the 54E1 rail, which are commonly used in the Dutch railway network. Note that the model can easily be adjusted for other wheel and rail profiles (i.e. measured worn profiles, UIC60, UIC75, etc.). The single rail instead of a complete track (i.e. double rails) is modeled by taking advantage of the symmetrical characteristic of the vehicle and track. In order to reduce the calculation expense, a short rail length of 1.8 m is selected as inspired by Vo et al.
20
and Pletz et al.
21
The two ends of rail are constrained in the longitudinal and lateral directions. The bottom surface of rail is completely fixed (i.e. a rigid foundation as inspired by the work of Zhao and Li
19
). The reason for defining such boundary conditions is to minimize the vibration of the structure (e.g. the sprung mass in Figure 1(a)) excited by the rolling of a wheel over a rail. In this way, the comparability of FE results to those of CONTACT, which focuses on the cases of steady-state contact,5,33 can be enhanced for the purpose of verification.19,31 The results of the verification of FE model with realistic W/R profiles considered have already been presented in Ma et al.
31
FE model of W/R dynamic contact: (a) schematic graph; (b) FE model – side view; (c) refined mesh at the rail potential contact area; (d) refined mesh at the wheel potential contact area; (e) FE model – cross-sectional view; (f) close-up view in refined regions.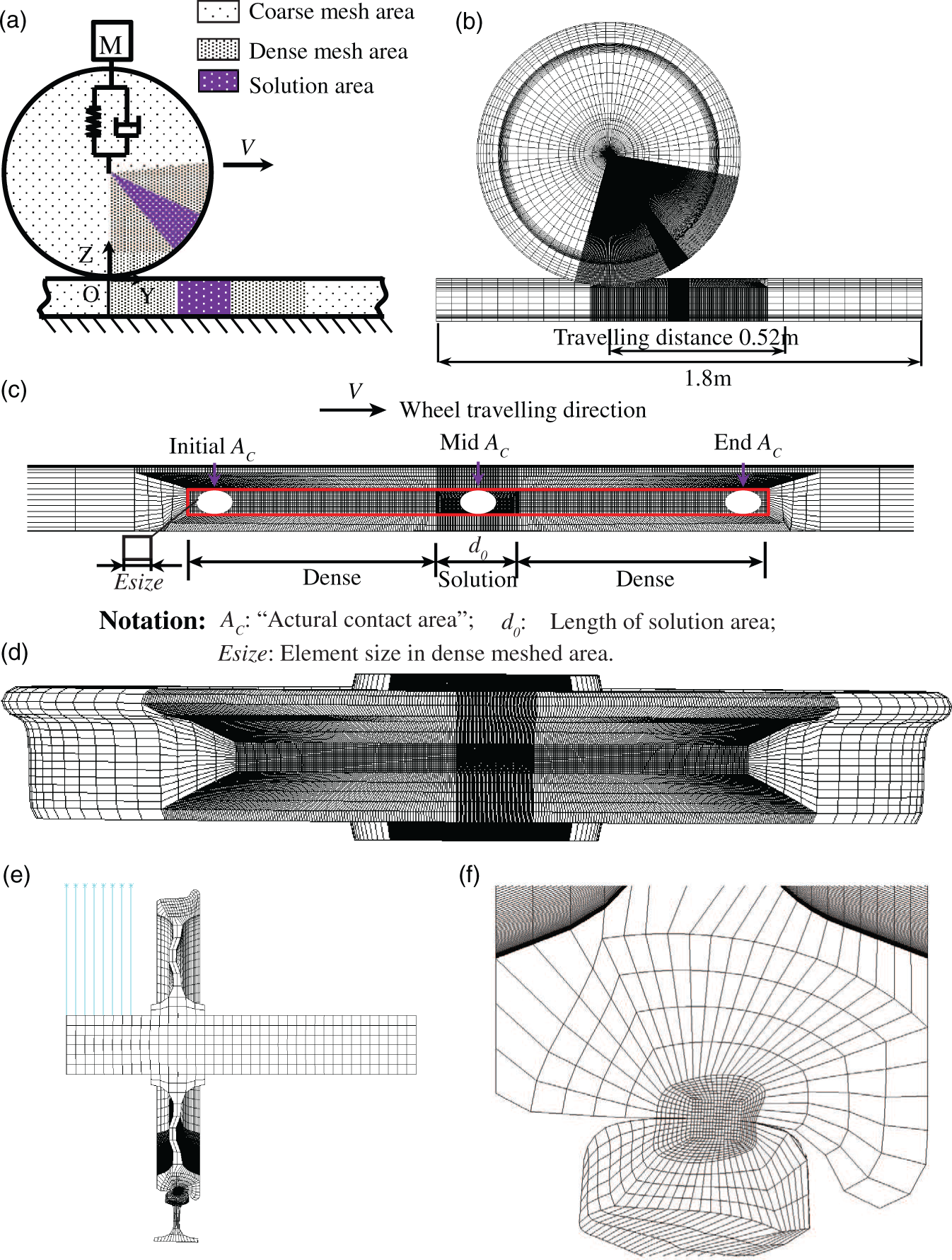
The wheel is set to roll from the origin of the global coordinate system over a short traveling distance of 0.52 m along the rail (see Figure 1(a) and (b)). The corresponding wheel rolling angle (i.e. a wheel rolled) is approximately 65°. The wheel is traveling with an initial translational velocity of 140 km/h (typical speed of VIRM intercity trains in the Netherlands). Accordingly, an initial angular velocity of 84.46°/s (based on the magnitudes of wheel rolling radii) is exerted on the wheel. Besides, a driving torque with a traction coefficient of 0.25 is applied on the wheel.
The global coordinate system O – XYZ is defined as: the X-axis is parallel to the longitudinal direction along which the wheel-set travels, the Z-axis is the vertical pointing upwards, and the Y-axis is perpendicular both X and Z directions, forming a right-handed Cartesian coordinate system.
In the FE model, the wheel and rail contact bodies are discretized with 3D 8-node structural solid elements (SOLID164). Only the regions where the wheel travels are discretized with the dense mesh, leaving the remaining regions with the coarse mesh (see Figure 1(a) to (d)). A solution area is introduced and positioned in the middle of the dense meshed area. This area is defined as a region to extract and analyze the contact properties, such as the resulting contact patch and normal pressure. In this region, the mesh size is approximately two times smaller than the dense meshed area for the purpose of capturing the high stress–strain gradients. For the FE model shown in Figure 1, the mesh size in the solution area is 1 mm, while that in the dense meshed area is 2 mm. The wheel model has 141,312 solid elements and 154,711 nodes, whereas the rail model has 117,598 solid elements and 132,177 nodes.
Material properties and mechanical parameters.
Friction is the force resisting the relative motion (i.e. slip) of contact surfaces. Coefficient of friction = Friction force/Normal force.
Traction is the force applied to generate motion between a body and a tangential surface. The tangential traction appears only if the friction is assumed. Coefficient of traction = Traction/Normal force.
For such a typical FE contact analysis, the basic process consists of three steps: (1) Build the model, prescribing the initial location of W/R, defining correct boundary conditions, and preforming mesh refinement; (2) Apply axle loads and run simulations, involving traction application, contact definition, and settings of time steps; (3) Post-process the FE simulation results, examining the contact properties such as normal pressure, shear stresses within the contact patch, subsurface stress–strain responses, etc.
All the explicit FE simulations are performed on a workstation with an Intel(R) Xeon(R) @ 3.10 GHz 16 cores CPU and 32 GB RAM. Also, the shared memory parallel processing capability of ANSYS LS-DYNA (high-performance computation module) for eight processors is used.
Recap explicit FE theory
In this section, the corresponding explicit FE theories, which are highly related to the background of contact stability, are recapitulated. More generally, a solution of the unknown vector of the displacements 
where
Stability of central difference method
By taking advantage of the central difference method,18,30,35 the iterative scheme of the explicit time integration varying from the instant tn to 


From Courant criteria, it can be seen that the global calculated time step
Penalty method
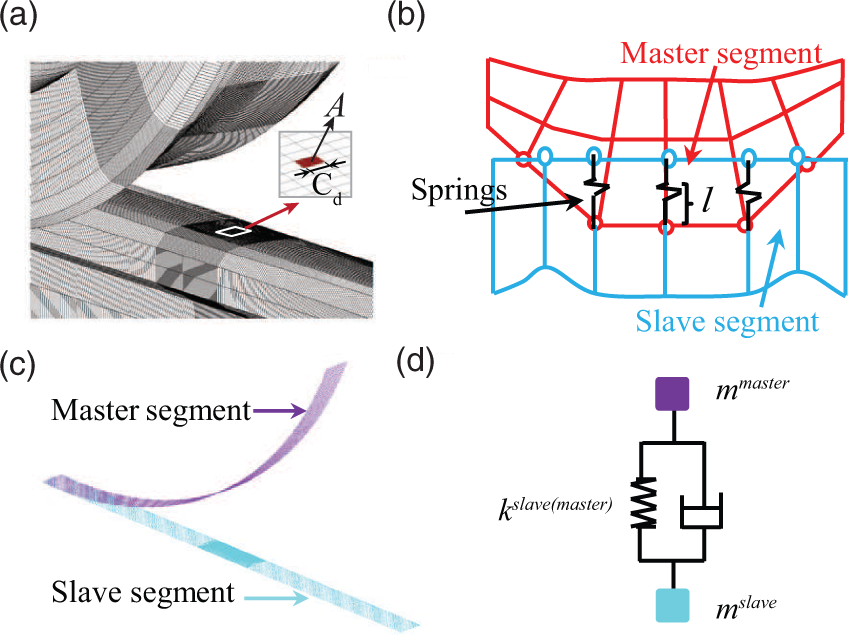
The penalty method17,30 is one of the most commonly used approaches to enforce the contact constrains in the explicit FE programs, where a list of invisible “interface spring” elements are placed between the penetrating slave nodes and the master segments (as depicted in Figure 2(a) to (c)). The restoring interface force vector Schematic graph of the penalty method: (a) close-up view of FE model; (b) cross-sectional view of the contact segments; (c) master–slave segments; (d) schematic of the “invisible” spring-damper-mass system.
Contact stiffness
The penalty stiffness k for these “springs” is prescribed as follows
18

Contact damping
In order to avoid undesirable oscillations in contact, a certain amount of damping perpendicular to the contact surfaces is automatically included in the explicit FE software (e.g. LS-DYNA). For simplicity, a damping coefficient ξ is introduced as
18

Contact stability
Together with the related nodal mass mmaster and mslave, the “closed” contact segment (see Figure 2) becomes an “invisible” spring-damper-mass system. Here, the contact segments are the components of nodes on the outmost surface layer of the two wheel–rail contact bodies (see Figure 1 and Figure 2(c)). mmaster and mslave are referred to as the master and slave nodal mass, respectively.
The interface spring stiffness k used in the contact algorithms 18 is based on the minimum value of the slave segment stiffness kslave or master segment stiffness kmaster. Accordingly, there are two time step sizes obtained according to the two contact stiffness (master and slave) for these invisible spring-damper contact elements. One is the contact time step size of the master segment, and the other is that of the slave segment.
Contact surface time steps
Two critical time steps for the master segments 
Taking the contact damping coefficient ξ into account, the critical time step size of contact elements 
Contact stability criteria
The calculation time step 
Otherwise, the contact stability could not be guaranteed.
Underlying challenges and possible solutions
As it has been presented in the section “Recap explicit FE theory”, the FE theoretical background is rather complicated. There are several interface parameters involved in both the contact modeling and solving procedures. Thus, a number of challenges are encountered and need to be addressed.
Interface parameters
To properly capture the highly nonlinear contact characteristics of W/R interaction, a very dense mesh in the potential contact area is always desired. However, it is not always the case that the very dense mesh can be used in the model due to the large and complex contact geometries as well as the limited computer capability. Therefore, a nonuniform mesh (see Figure 1(c)) is introduced by making the solution area much denser than the other contact regions.
It is clear that the two parameters (mesh density and mesh uniformity) shown in Figure 1(c) are to be adjusted and evaluated. By decreasing the length d0 of the solution area into zero, the nonuniform mesh refinement becomes a uniform one. Similarly, the mesh density could be changed by increasing or decreasing the mesh size Esize of the element. Here, “mesh density” refers to the number of elements per unit area in the dense meshed area (not that in the solution area).
Besides, there are no standard routines on how to prescribe the magnitude of the penalty scale factor α and the contact damping factor VDC embedded in equations (6) and (7). Their effects on the contact stability have not been sufficiently discussed especially in the field of FE-based simulations on W/R rolling frictional contact.
To sum up, the main challenges associated are exploring the relation between the dynamic responses of W/R interaction and the four key interface parameters: namely, (1) Penalty scale factor α; (2) Mesh uniformity d0; (3) Mesh size Esize; (4) Contact damping factor VDC.
Approaches for addressing challenges
To address the aforementioned challenges, the approach of parametric study is adopted. In this section, the details of this approach are given first. Following that, the scheme on how to integrate such an approach with the FE analysis is reported.
Parametric study
According to the general rule of a parametric study, the dynamic behavior of the W/R interaction has to be studied by iteratively varying the values of certain interface parameters, while the other parameters are fixed. Based on the parametric studies, the following questions are expected to be answered:
How does the contact instability look like? Are there any effective measures for maintaining the contact stability (if contact instability happens)? What are the effects of the interface parameters on the performance of the contact stability as well as on the dynamic contact responses? Is there a set of interface parameters that is the most suitable one for the analysis of W/R interaction?
Integration with FE model
To perform the parametric study, it has to be properly integrated with the 3D-FE model. Its basic working mechanism is shown in Figure 3.
Flow chart of the parametric study with 3D-FE model.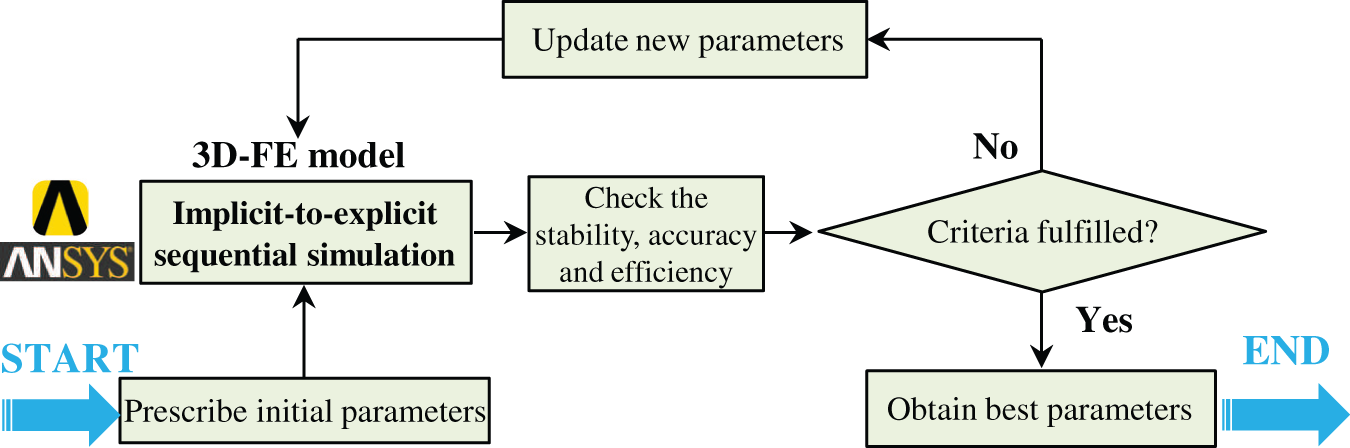
Firstly, an initial set of the interface parameters is prescribed in the 3D-FE model. Once the explicit FE simulations are completed, the statuses of the contact stability, calculation efficiency, and accuracy have to be examined. The criteria are the good compromise among the contact stability, calculation efficiency, and accuracy. When the criteria are satisfied, the best set of the interface parameters is identified. If not, new parameters will be updated and tested against the 3D-FE simulations iteratively until such a compromise is reached.
Results and discussions
Following the flow chart shown in Figure 3, a series of explicit FE simulations are performed so as to examine the effect of the four interface parameters on the performance of W/R interaction. These interface parameters vary within certain given ranges:
Penalty scale factor α (from 0.05 to 409.6); Mesh uniformity d0 (from 0 mm to 120 mm); Mesh size Esize (from 1.5 mm to 4.0 mm); Damping factor VDC (from 10 to 180).
It is worth noting that all these interface parameters are studied in the case of zero lateral shift of the wheel-set. To increase the calculation efficiency of this parametric study, the FE modeling procedure has been parameterized using MATLAB scripts and ANSYS Parametric Design Language (APDL). 24
Contact stiffness
Nine cases of penalty scale factor varying from 0.05 to 102.4 are selected for analysis, while the other parameters are kept constant. Due to the inversely proportional relation between the contact time steps
Figure 4(a) shows the variation of vertical contact forces corresponding to different penalty scale factors α. It can be seen that a “saw-toothed” force oscillation is generated and located at a distance of 150 mm from the origin. As the wheel rolls further along the rail and approaches the vicinity of the solution area (d0 = 80 mm), a “sudden perturbation” of the contact force gets noticeable for the cases of α = 204.8 and α = 409.6 (extremely high contact stiffness) as well as those of α = 0.05 and α = 0.1 (extremely low contact stiffness).
(a) Variation of the vertical contact forces w.r.t. different penalty scale factors α; (b) variation of three typical time steps.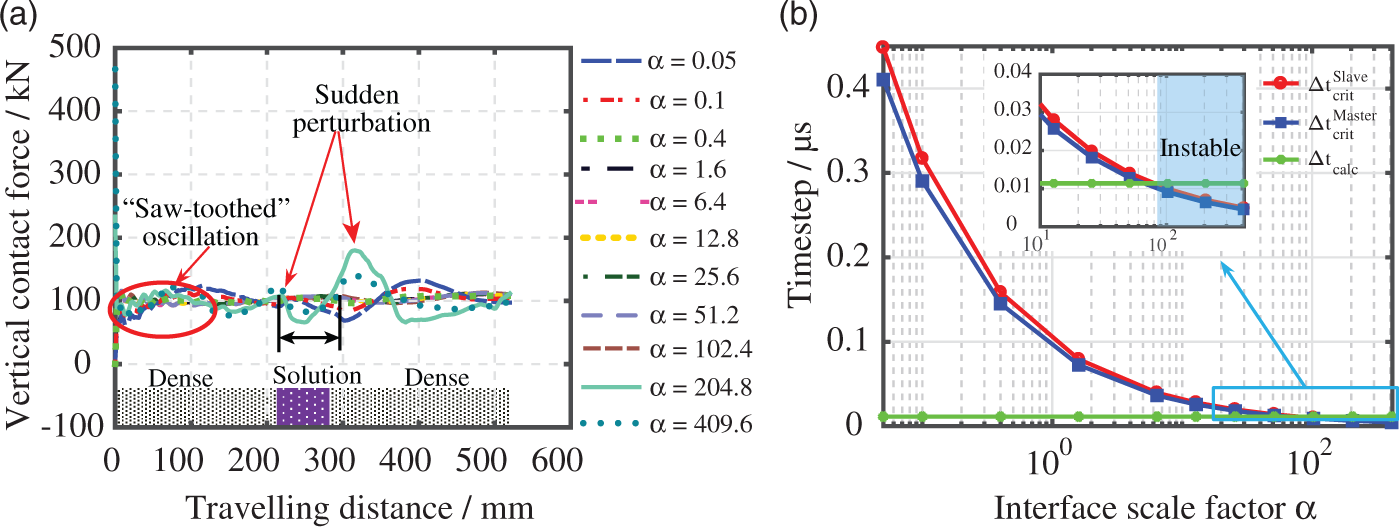
The observed “saw-toothed oscillations” and “sudden perturbations” of the contact forces could all be interpreted as the indicators of “contact instability”. In contrast, a continuous and smooth dynamic response from the explicit FE simulations is perceived as a prognosis of the “contact stability”.
A comparison (see Figure 4(b)) of the contact time steps
In order to verify the hypothesis of the initial conditions, four FE simulations with different initial train velocities V0 ranging from 90 km/h to 250 km/h are performed. Here, the penalty scale factor α of 12.8 is adopted. Figure 5(a) shows the variation of vertical contact forces with respect to different initial train velocities V0. At the higher train speed levels, it can be seen that the “saw-toothed” dynamic force oscillations are getting more noticeable.
(a) Variation of the vertical contact forces w.r.t. different train velocities V0; (b) variation of the vertical contact forces corresponding to reduced calculation time step sizes 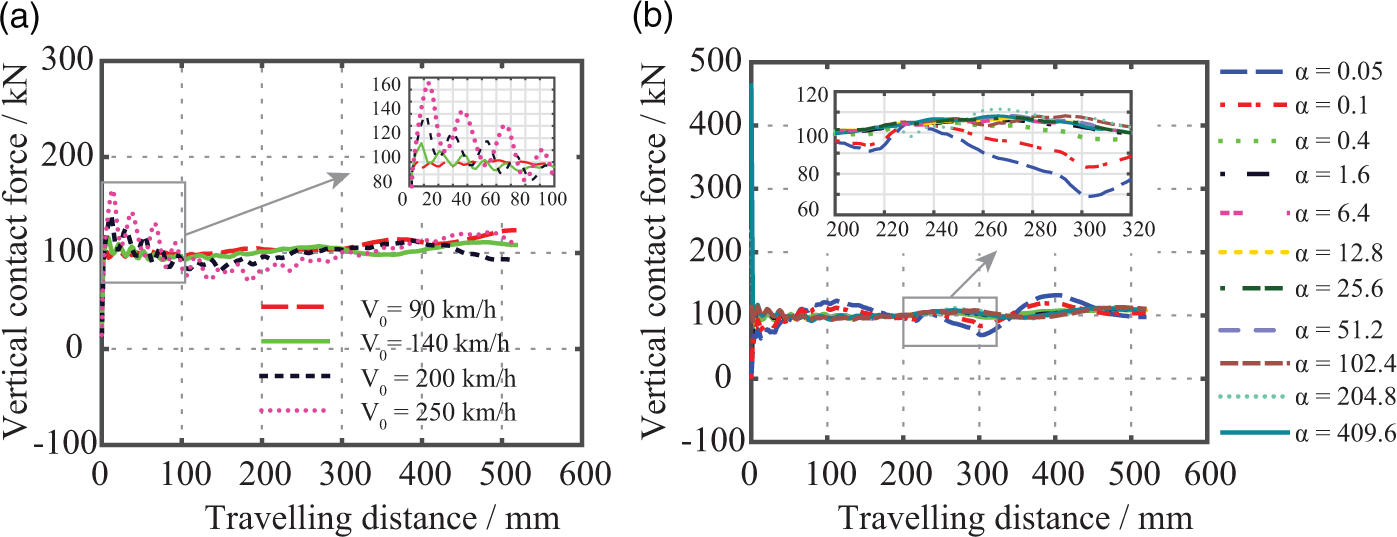
Besides, two more FE simulations for the cases of
However, the calculation expenses for the tuned cases of
Figure 6 shows the distributions of normal contact pressure, which are extracted at the instant when the wheel travels over the middle of the solution area. It can be seen that both the magnitude and distribution of the contact pressure tend to converge at higher levels of penalty scale factor. Such an observation agrees well with the classical penalty theory17,18,30,34 that the larger the contact stiffness is, the more realistic the results would be.
Effect of contact stiffness on contact pressure distribution.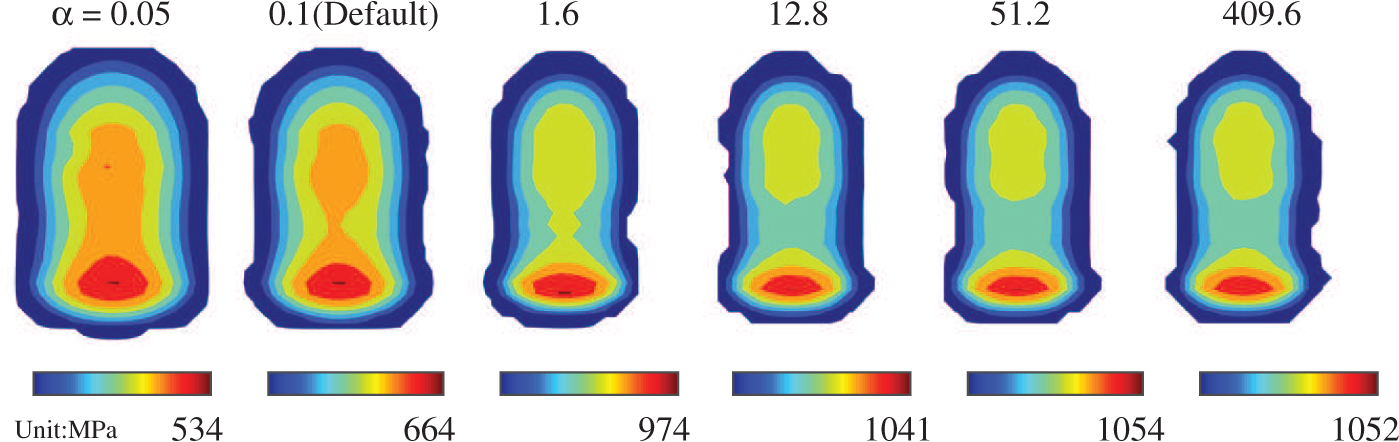
It can be concluded from the simulation results that the default parameters (such as the default penalty scale factor α = 0.1) in LS-DYNA cannot accurately simulate the dynamic behavior of the W/R interaction well, and the values of these parameters used in the analysis have to be justified. The guidelines for selecting a suitable penalty scale factor α could be formulated as follows:
To ensure a proper accuracy of the contact solution, the contact stiffness should be as large as possible, which can be achieved by increasing the penalty scale factor α. For the chosen value of the penalty scale factor, the calculation time step Once the calculation time step
Based on the aforementioned guideline, a penalty scale factor α of 12.8 that can maintain the best compromise of the accurate contact performance and calculation efficiency is suggested.
Mesh uniformity
Figure 7(a) and (b) shows the FE models corresponding to different mesh uniformities. The case of d0 equal to 0 mm indicates the uniform mesh (see Figure 7(d)). d0 is prescribed to vary from 0 mm to 120 mm. When the length of the solution area changes from 40 mm to 120 mm, the number of the solid elements in the solution area increases from 472 to 1382.
Variation of nonuniform mesh to uniform mesh: (a) 120 mm; (b) 80 mm; (c) 40 mm; (d) 0 mm – uniform mesh.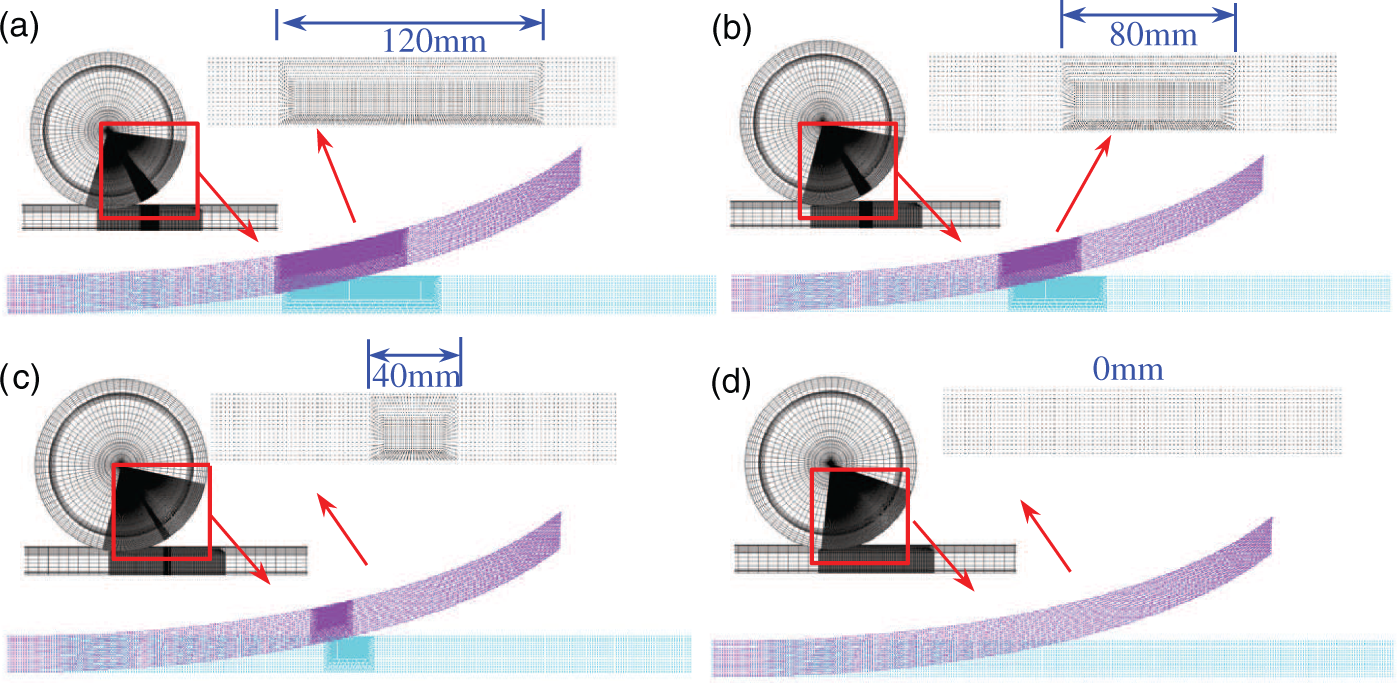
To study the influence of the mesh uniformity on the dynamic performance of W/R interaction, the default penalty scale factor α of 0.1 is chosen to be studied first, while the other parameters (except the mesh uniformity d0) are fixed.
Figure 8(a) shows the dynamic responses with the default penalty scale factor of Variation of the vertical contact forces w.r.t. different mesh uniformities: (a) default penalty scale factor 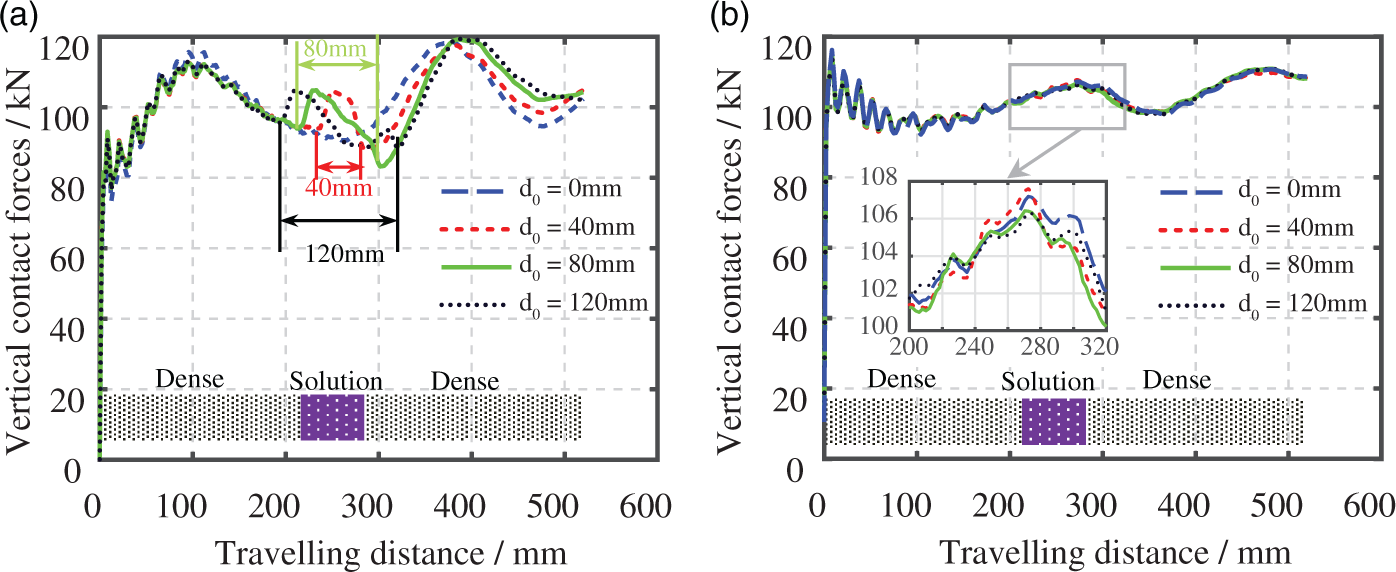
To verify the presumption of the contact stiffness difference, another four cases of FE simulations corresponding to different mesh uniformities have been analyzed using the suggested best penalty scale factor of 12.8. The variation of the vertical contact forces is shown in Figure 8(b). It can be seen that the “sudden perturbations” of the contact instability inside the solution area, which occur at the default penalty scale factor of 0.1 as shown in Figure 8(a), die out. All the responses of the contact forces seem to converge into a common curve. This implies that the “sudden perturbations” introduced by mesh nonuniformity at low contact stiffness could be arrested and eliminated by specifying a high enough penalty scale factor (i.e. 12.8). In other words, the high penalty scale factor can minimize the contact stiffness difference and maintain the contact stability.
Figure 9 shows the variation of time step sizes corresponding to different mesh uniformities. It is clear that the calculation time step size Variation of time step sizes w.r.t. different mesh uniformities: (a) default penalty scale factor 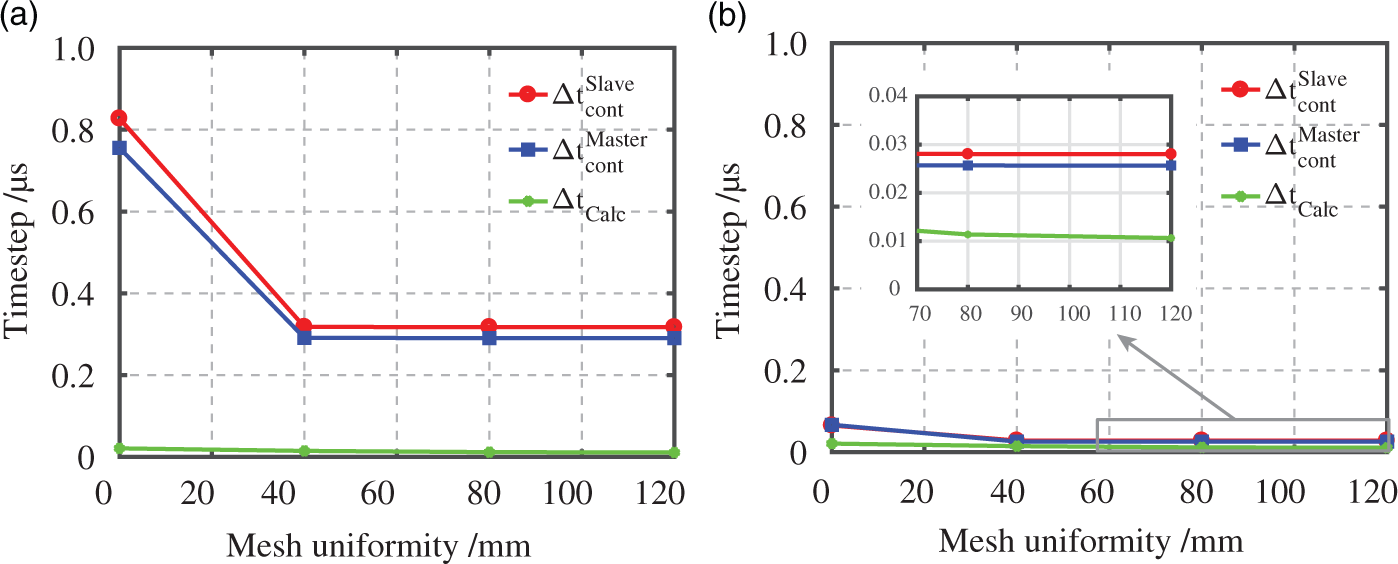
It is observed from Figure 10 that both the magnitude and distribution of the contact pressure obtained from the uniformly meshed FE model are quite different from those of the FE simulations having nonuniform mesh patterns. The reason for that is attributed to the difference of FE mesh patterns in the solution area, where the uniformly meshed FE model is too coarse to capture the high stress gradients within the contact patch. It further demonstrates the importance of mesh nonuniformities to the contact solutions, which means the mesh nonuniformity is one necessary feature for the analysis of W/R interaction.
Effect of mesh uniformity on contact pressure distribution.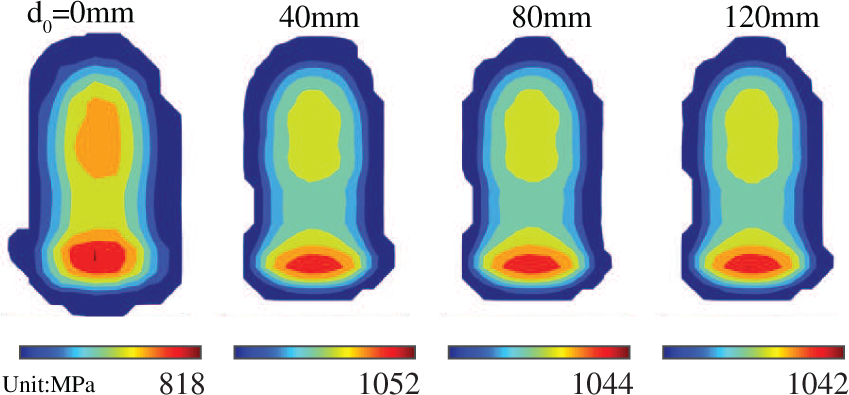
Although the mesh nonuniformity can introduce a high calculation expense compared with the uniformed mesh, detailed contact properties are obtained. Considering that the longer the refined solution area is, the greater the amount of the elements will be created, it makes sense to adopt the length d0 = 80 mm of the solution area to make a good compromise between the calculation efficiency and accuracy. Although the mesh nonuniformity introduces contact instability, using proper contact stiffness this effect can be eliminated.
Mesh density
In order to study the effect of mesh density on the performance of W/R interaction, six cases of mesh size varying from 1.5 to 4.0 mm are studied. The other parameters are fixed.
Figure 11(a) shows the variation of vertical contact forces corresponding to different mesh sizes. It should be noted that the penalty scale factor Variation of the vertical contact forces w.r.t. different mesh sizes: (a) default penalty scale factor Schematic graph of the mesh size variation: (a) brick element with side length of Cd (also shown in Figure 2(a)); (b) refined small element with side length of 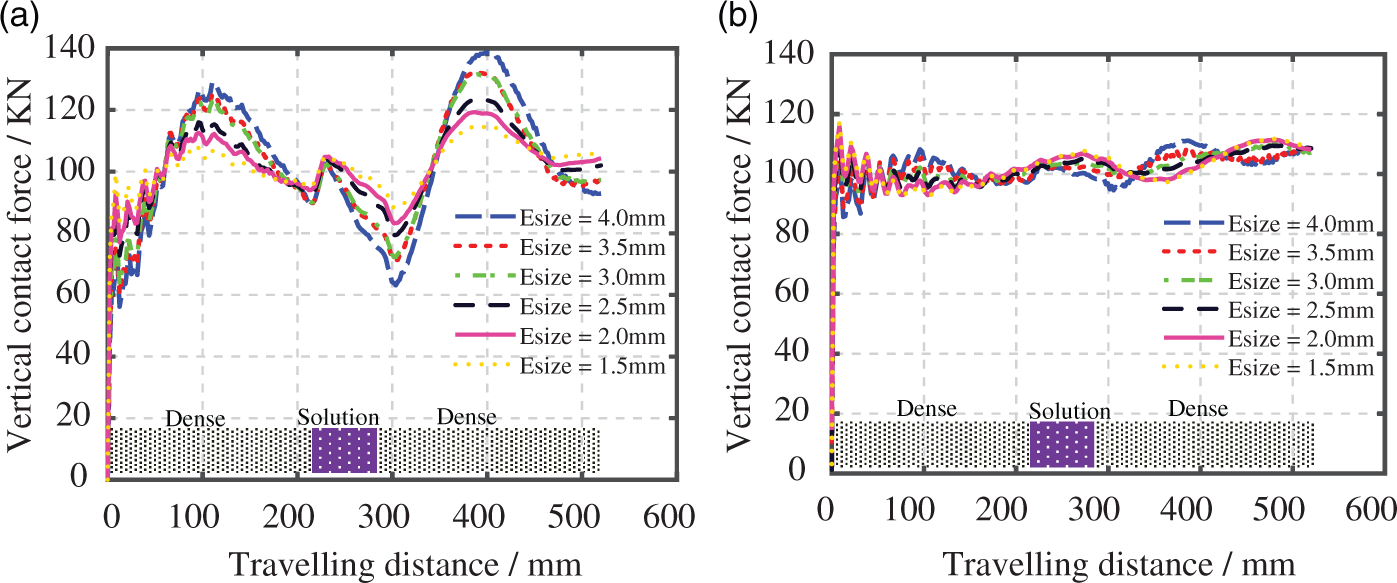
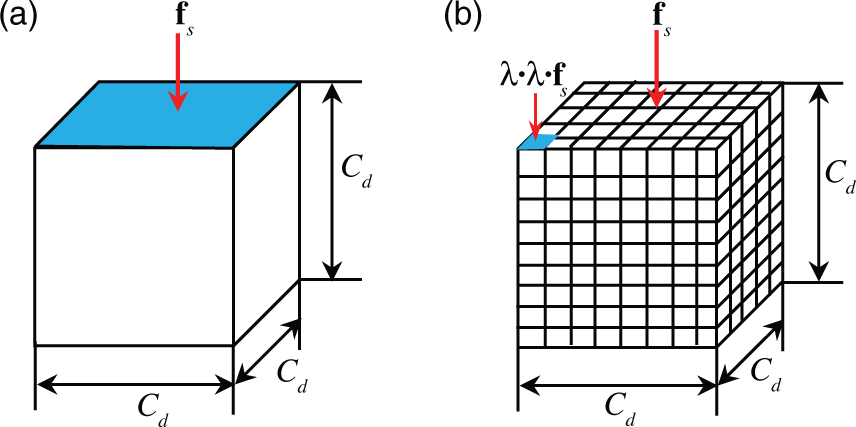
To further evaluate the influence of mesh density at high level of contact stiffness, another six cases of varying mesh sizes are studied by increasing the penalty scale factor to the optimal one of
The reason for this phenomenon can be attributed to the reduced element size, which decreases from Cd to 
From equations (5) and (11), it is found that the dal contact stiffness k contributed by the smaller elements (
Figure 13(a) and (b) shows the variation of time step sizes with respect to different mesh sizes. With the decrease of the element size, both the contact and calculation time step sizes tend to drop.
Variation of the time step sizes w.r.t. different mesh sizes: (a) default penalty scale factor α = 0.1; (b) optimal penalty scale factor α = 12.8.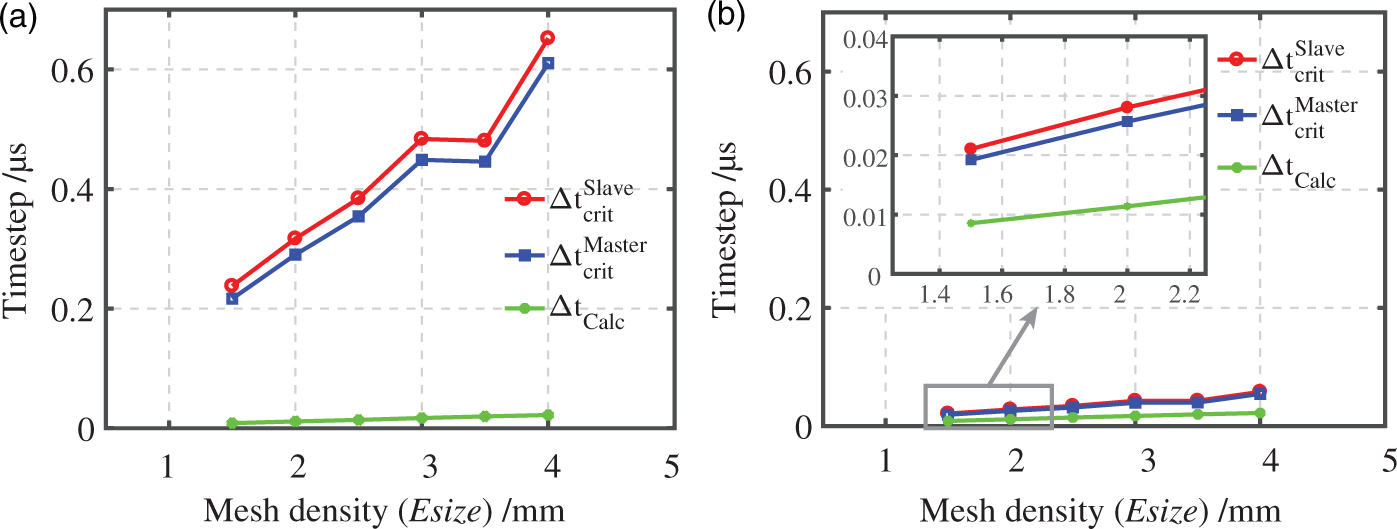
Figure 14(a) shows the normal contact pressure as a continuous contour plot for all the nodes in contact. It can be seen that the distribution of the normal contact pressure is getting converged towards the denser mesh, which also indicates that the denser the mesh is, the better the contact solution would be achieved.
Effect of mesh size on contact pressure distribution: (a) nodal contour plot; (b) element contour plot.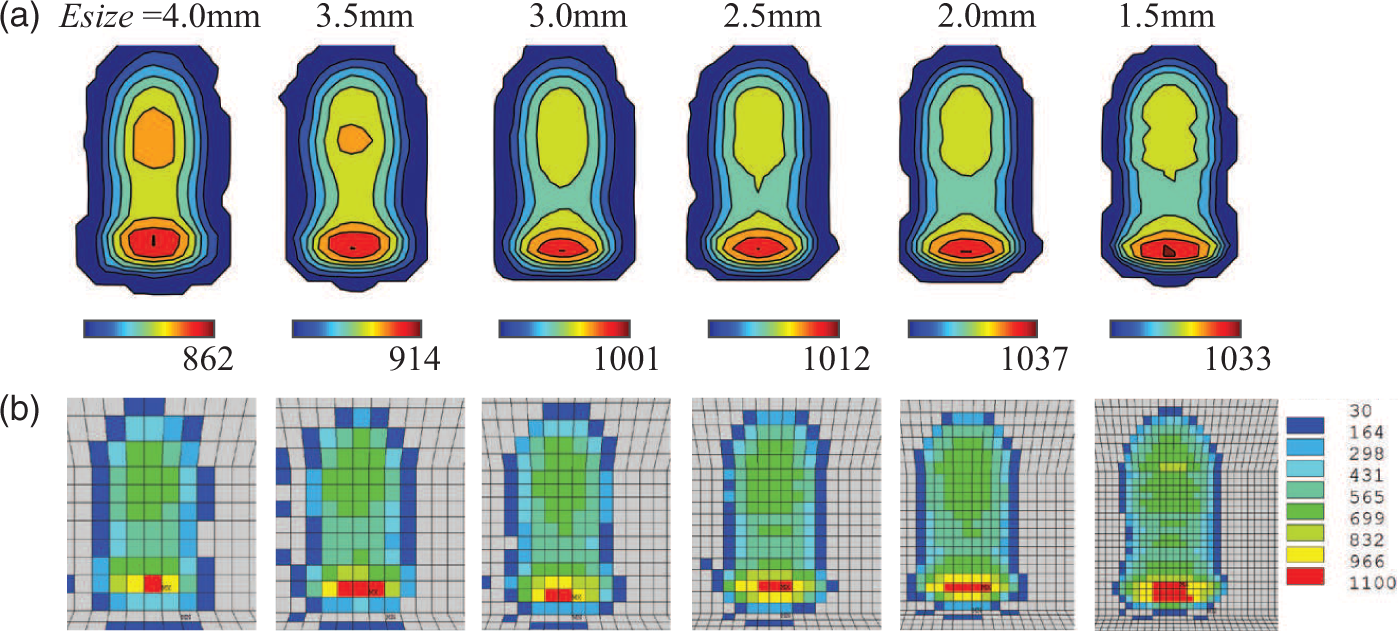
Figure 14(b) shows the normal contact solution results as discontinuous element contours. The discontinuity between contours of adjacent elements is an indicator of the stress gradient across elements. These element contours are determined by linear interpolation within each element, unaffected by surrounding elements (i.e. no nodal averaging is performed). Following the method presented in Ma et al.,
31
the contact statuses of these elements are determined by the normal pressure σn as

Effect of mesh size on normal contact properties.
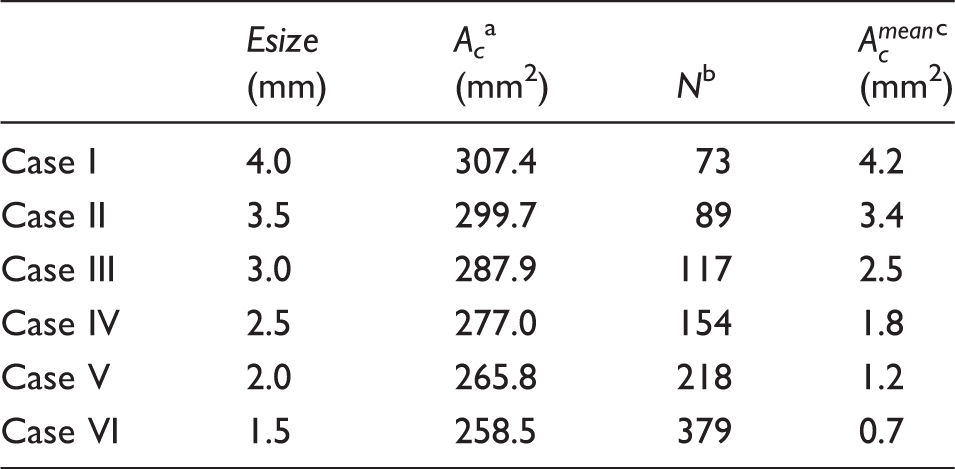
Real contact area.
Number of elements in contact.
Average contact area per element.
As the calculation expense would increase drastically due to the huge amount of elements generated, it is hardly possible to run the simulations with extremely small mesh size (e.g. 0.5 mm). The alternative is to run the simulation with a better selected parameter of mesh density, which could compromise between the calculation accuracy and efficiency in accordance with the criteria stated in the section of “Underlying challenges and possible solutions”. It is found that when the ratio of the contact area to the number of element in contact is around 1, a good compromise between calculation efficiency and accuracy is reached. Thus, the best mesh size at the dense meshed area is suggested to be 2.0 mm (Case V, see Table 2), while the one in the solution area is 1.0 mm. It is worth noting that the suggested mesh size in the solution area (i.e. 1.0 mm) falls within the range of 0.33 mm to 1.33 mm, which is recommended by Zhao and Li 19 to maintain an accuracy comparable to that of CONTACT and to satisfy the accuracy of engineering applications, respectively.
In summary, the mesh density can drastically influence the dynamic responses of W/R interaction when the contact stiffness is small. With the increase of the penalty stiffness, the dynamic response is getting less sensitive to the variation of mesh density. The denser the FE mesh is, the better the FE results can represent the reality.
Contact damping
Similar to the parametric cases studied previously, the contact damping factor VDC varies from 10 to 180. The corresponding dynamic responses of W/R contact forces are displayed in Figure 15. It can be seen that when the contact damping factor gets higher than 160, the resulting contact forces start to oscillate.
Variation of the vertical contact forces w.r.t. different contact damping factors VDC: (a) default calculation time step 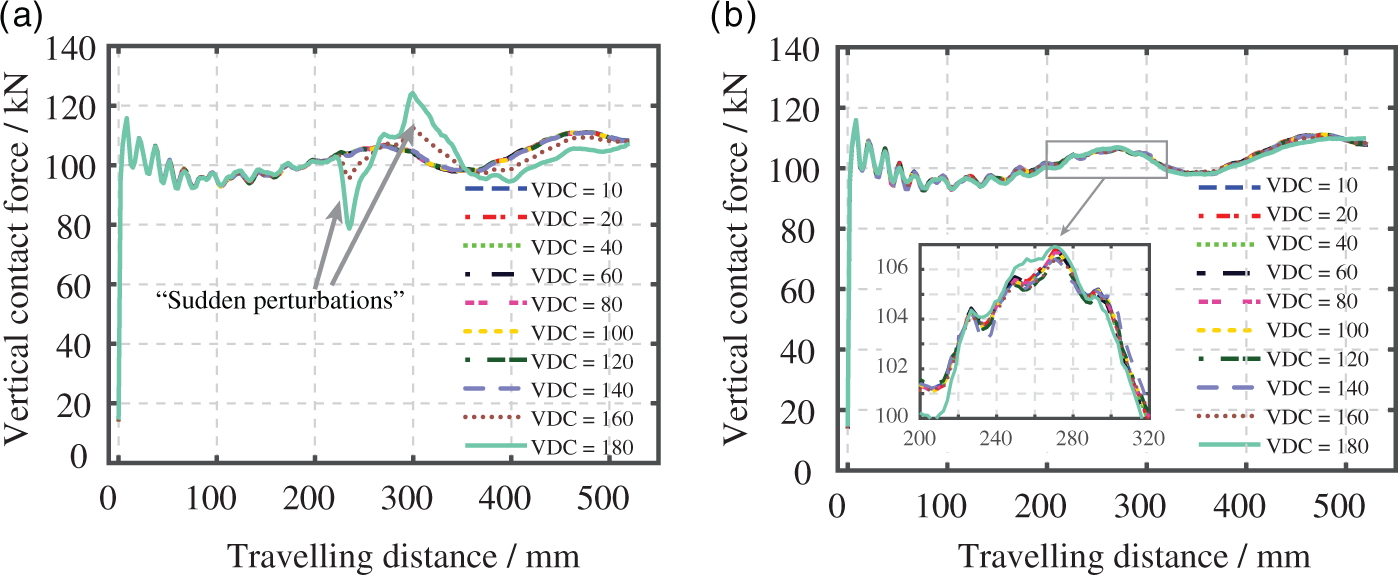
According to equations (9) and (10), the “sudden perturbations” (nearby the solution area) are assumed to be caused by the fact that the value of the calculation time step size exceeds the magnitude of the reduced critical contact time step size. Attempts have been made to check the time step violations by comparing the contact time step sizes and the calculation time step sizes. It is found that the exported contact time step size only follows equation (8), which means that the influence of the contact damping as indicated by equation (9) is not considered for the output. As a consequence, all the contact time step sizes remain constant under different contact damping factors. Therefore, the check of time step violations such as the ones shown in Figures 9 and 13 are not presented in this section. But it is still assumed that the high contact damping is the main cause for the “sudden perturbations”.
To check the validity of the assumption, the calculation time step sizes
Figure 16 shows the variation of the contact pressure corresponding to different contact damping factors. It can be seen that both the magnitude and distribution of the contact pressure hold almost constant, which indicates that the influence of the contact damping factors on the contact pressure is insignificant. This agrees with the statement made by Hallquist
18
that contact damping tends to play an important role in the analysis of impact-related problems.
Effect of contact damping on contact pressure distribution.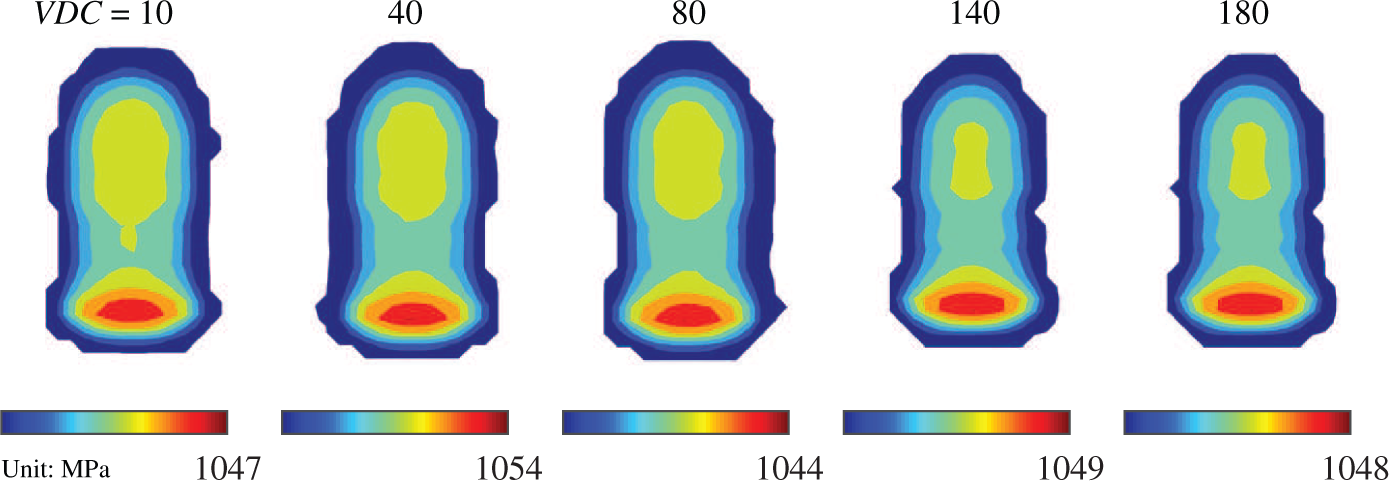
In short, the contact damping is a parameter that is less sensitive to the analyses of W/R interaction. The default damping factor VDC of 80 is good enough to fulfill the criteria of contact stability.
As reported in Tomberger et al., 37 the sources of contact damping are relatively complex in reality, including the surface roughness, lubricant, liquid, etc. Although those over-critical damping factors (i.e. V DC > 100) employed may not have a direct physical correspondence, it is necessary to demonstrate the low sensitive effect of contact damping to the contact instabilities. Further investigation on the modeling of contact damping with high degree of realism is part of the future work.
Discussion: Applicability of suggested guidelines and parameters
From the parametric results, it can be recognized that the proposed guidelines are suitable for identifying an appropriate set of interface parameters. Those guidelines are not subjected to particular geometrical and/or technical restrictions (i.e. special contact geometries, hardware configurations, programming languages, etc.). Thus, it enables the suggested guidelines to have broad applicability in the area of explicit FE-based contact modeling, especially in which the contact constraints are enforced with penalty method. It is, also, recommended for further applications to other mechanical contact/impact systems (e.g., gear, bearing, etc.) that have complex local contact geometries.
With respect to the suggested interface parameters (i.e. penalty scale factor (
In summary, the applicability of the interface parameters suggested is classified into two categories:
Suggested/similar mesh patterns as shown in Figure 1: The interface parameters suggested have wide applicability for the cases of different axle loads, train speeds, W/R profiles, etc. This can be explained by the recapitulated explicit FE theory, from which it finds that these varying operational patterns and geometrical parameters have no direct relations with the criteria of contact stability.
Taking the varying axle loads (ranging from 80 kN to 140 kN) as an example (see Figure 17), the interface parameters suggested are capable of suppressing the oscillations of contact forces, and thus maintain the contact stability effectively. Also, with the increase of the axle load, a steady growth of the area of contact patches and the magnitude of contact pressure is observed.
Applicability of interface parameters suggested to the cases of varying axle loads: (a) vertical contact forces; (b) contact pressure.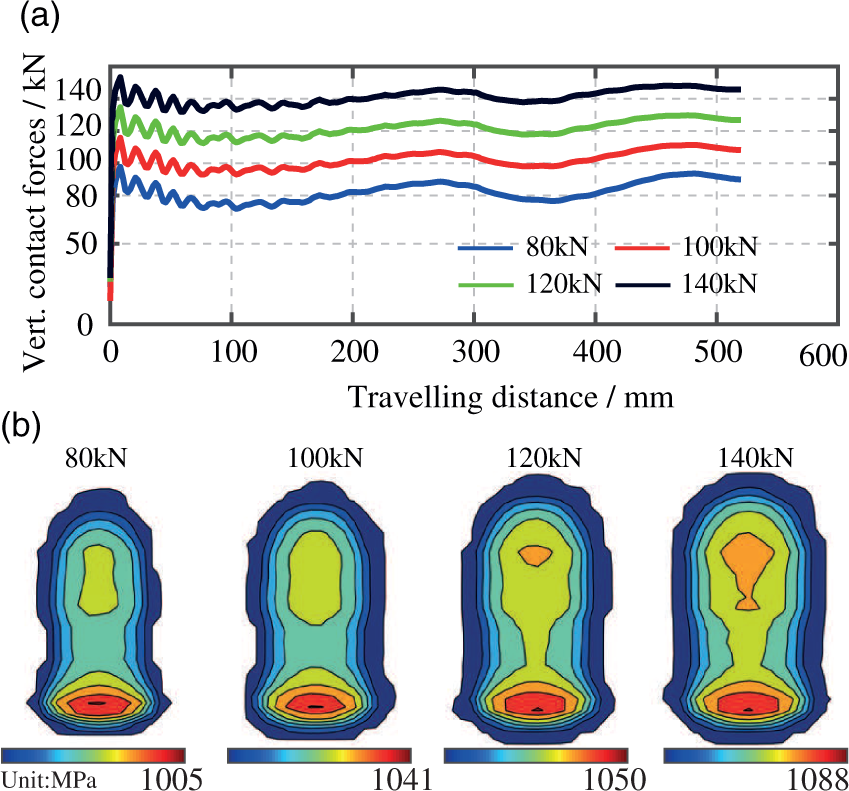
It has also been demonstrated in Ma et al.31,32 that the interface parameters suggested are suitable for the cases of varying operational patterns (i.e. varying friction and traction) and contact geometries (e.g. crossing rail).
Different mesh patterns: When the form (uniformity) and level (density) of mesh discretization change, the magnitudes of both the calculation
Taking the selection of good penalty scale factor αoptimal as an example, Figure 18(a) schematically shows the relation (i.e. adapted from Figure 4(b)) between the calculation and contact time step sizes. As discussed previously, the optimal penalty scale factor αoptimal is selected at the vicinity of the unstable area (i.e. Effect of mesh patterns on the selection of optimal penalty scale factor α: (a) reference case (generalized from Figure 4(b)); (b) variation of 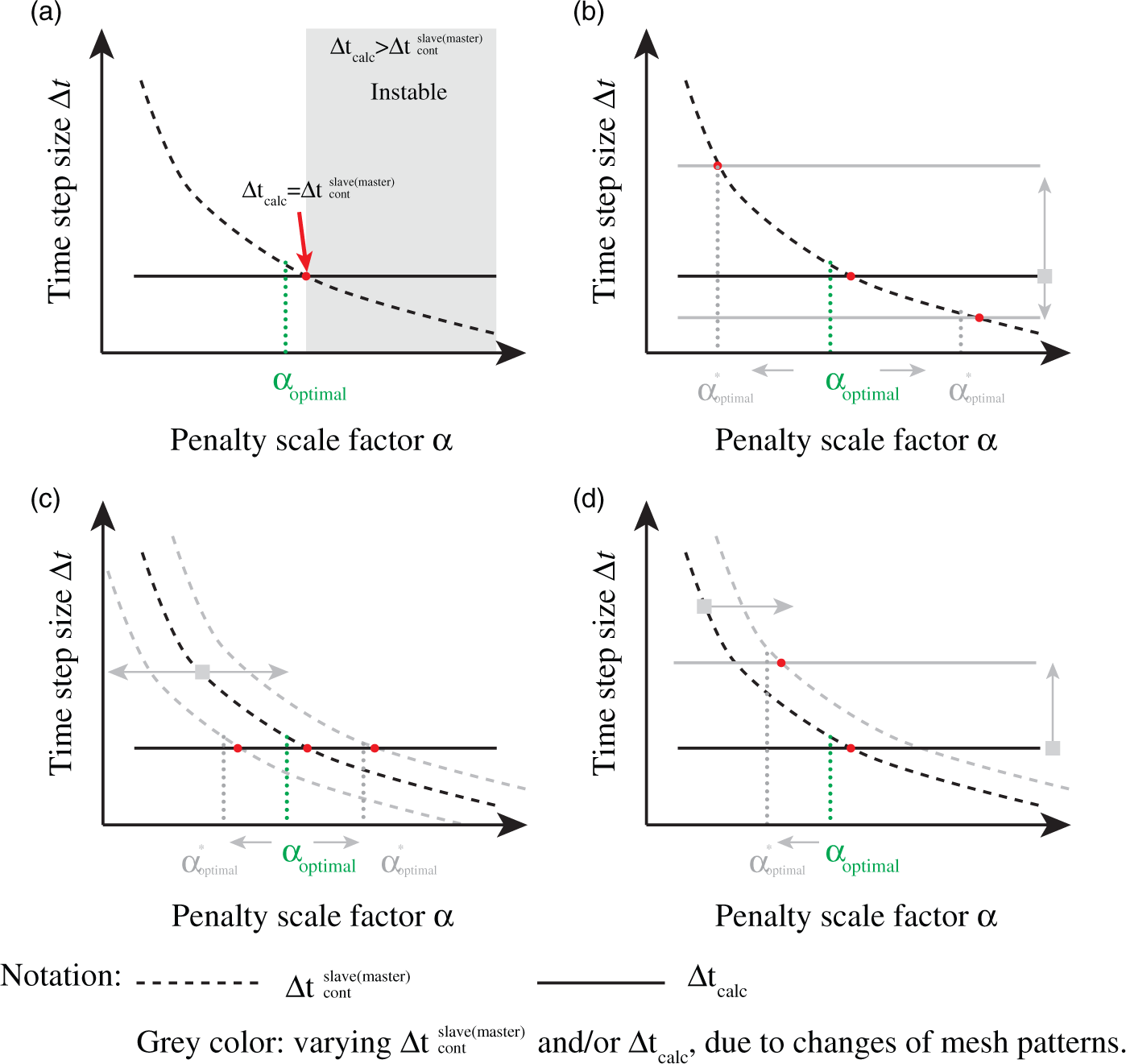
For this reason, the change in the optimal penalty scale factor, alongside the varying mesh patterns, is divided into three groups:
Variation of Variation of Variation of both
In summary, when the mesh patterns are significantly different from that shown in Figure 1, it is suggested to follow the general guidelines to find the suitable interface parameters.
Conclusions and outlook
In this paper, the effect of W/R interface parameters on the contact stability in the explicit FE analysis has been studied. The numerical phenomena called “contact (in)stabilities” have been presented.
Based on the results of this study, it is concluded that the interface parameters (e.g. contact stiffness, damping, mesh size, etc.) strongly affect the accuracy of contact solutions and must be selected carefully. The wrong choice of these parameters (such as too high/low contact stiffness and damping, course mesh, or wrong combination of these parameters) can result in an inaccurate solution of the contact problem that manifests itself in the amplification of the contact force or/and inaccurate contact responses (mainly due to the contact instability). The choice of these parameters used in the explicit FE analysis has to be justified.
The guideline for the selection of optimum interface parameters, which guarantees the contact stability and therefore provides an accurate solution, is proposed. According to this guideline, the time steps in the explicit analysis
An appropriate set of interface parameters is suggested (i.e. penalty scale factor (12.8), damping factor (80), mesh size (dense meshed area: 2.0 mm; solution area: 1.0 mm) and uniformity (80 mm)). In comparison with the general applicability of the proposed guidelines (e.g. other mechanical contact/impact systems), the interface parameters suggested have reduced applicability.
Further research on the contact instabilities excited physically by friction or surface defects (i.e. wheel-flats, corrugation, squats, etc.) is part of the future work.
Footnotes
Acknowledgements
The authors thank Dr Hongxia Zhou for critically reading this manuscript and giving helpful suggestions. The comments from Prof. Rolf Dollevoet on the manuscript are gratefully acknowledged. The authors are also very grateful to all the reviewers for their thorough reading of the manuscript and for their constructive comments, which have helped us to improve the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The author Yuewei Ma would like to thank CSC (China Scholarship Council) for their financial support.