
Abstract
This paper presents a literature review on the state of the art in modelling and experimenting with radial passenger car tires operating on contaminated road surfaces. To successfully model and experiment with radial passenger car tires, validation is required for the tire itself, material interactions, contaminant modelling, contact theories, and combined interactions. This work presents a review of previous studies. The review includes modelling and validation of passenger car tires in the finite element environment. Both static and dynamic validation techniques are reviewed, focusing on tire footprint, vertical stiffness, lateral stiffness, critical vertical frequency, and combined slip conditions. The modelling and physical interactions of contaminants such as sand, clay, ice, gravel, and snow are also presented for tire interactions on both on-road and off-road surfaces. Techniques such as Smoothed Particle Hydrodynamics (SPH), Finite Element Analysis (FEA), and Discrete Element Methods (DEM) are employed. The contact algorithms used or derived are also reviewed, as they are vital to the accurate prediction of contact forces between two objects. The contact algorithms presented are both physical and modelled, using contact theories such as the Hertzian contact theory, point contact models, and Lumped LeGre Friction models. Additionally, studies including tire-road and tire-terrain interaction characteristics are presented and discussed. These studies vary loading conditions through speed, loading, road surface, and temperature. Furthermore, research on hydroplaning prediction is presented, as water is a commonly found surface contaminant and presents a threat to all drivers. Finally, this review discusses shortcomings and best techniques as they pertain to winter-contaminated road surface modelling with tire interactions.
Keywords
Introduction
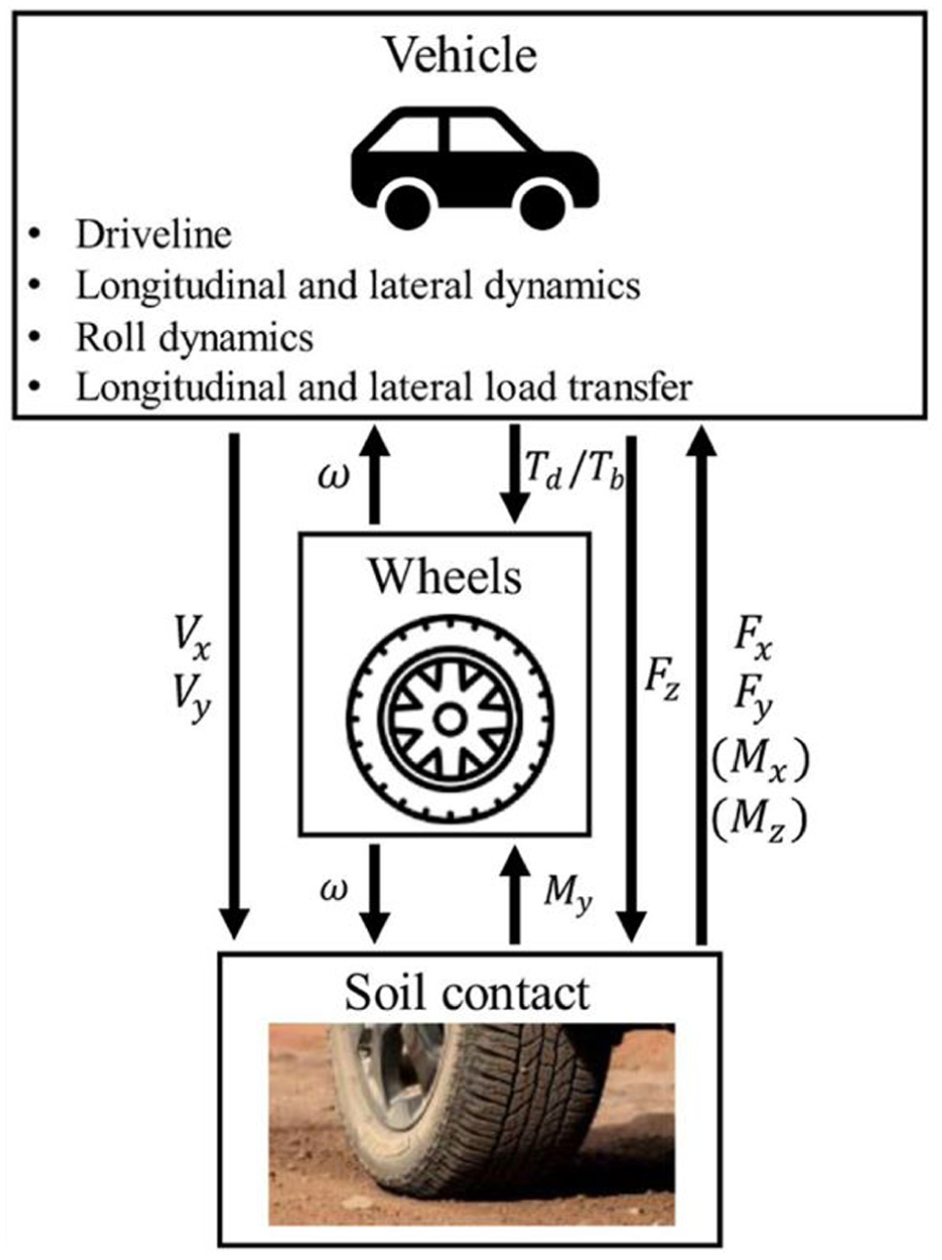
On a vehicle, there are only four entities that interact with the ground at any given time and influence vehicle dynamics during operation. To understand the dynamics better, it is common to model tires and research various scenarios where the tire may be influenced by different conditions such as vertical loading, inflation pressure, coefficient of friction on a surface, weather and temperature. With car tires in simulation, there are many aspects of developing the tire and road surface that are standardized. The tire must be modeled and validated within static and dynamic domain standards before it interacts with any surface. Subsequently, the tire interacts with the road surface through a contact algorithm that ensures interaction between the tire tread and the road material within the contact patch of the rubber. For research focused on passenger vehicles, the driveline must also be considered, with both free-rolling and driven tires needing optimization. To optimize a passenger car tire for interaction with a contaminated road surface, the best validation procedures, contact algorithms, road surfaces, contaminant modeling, and driveline configurations must be selected for each scenario. Accurately replicating real road conditions when winter abrasives are used on hard surfaces requires identifying knowledge gaps and applying the best techniques from existing research. While simple models can be created for basic tire interactions, the most effective models are those that can be scaled and coupled with models of the contaminants. Since not all surface contaminants—such as litter, engine oil, or roadkill—are uniformly distributed, focusing on winter materials like snow, water, salt, and sand, which typically sit evenly on the road, is more appropriate. This uniform model allows for data collection on tire interactions with both deformable terrain and rigid surfaces, providing insight into tire performance under hazardous conditions, such as icy, salted roads in winter.
This literature review thoroughly integrates tire modeling, contaminated surface representation, contact algorithms, and performance metrics into a comprehensive framework specifically aimed at winter road conditions. Unlike previous reviews that tend to isolate individual aspects, this work combines experimental and numerical studies across multiple contaminants (snow, salt, sand, ice, and water). It explicitly highlights gaps related to limited operating-condition ranges, the absence of driven versus free-rolling tire comparisons, and insufficient multi-level tire validation. A key novel contribution is identifying inconsistencies across published research and emphasizing the need for multi-fidelity tire validation combined with scalable particle-based contaminant modeling on rigid pavements. This paper outlines a clear roadmap for future studies to achieve realistic predictions of traction and rolling resistance under complex winter scenarios, such as combined ice-snow contamination.
Tire modeling and validation
Tire modeling and validation are an integral part of simulating the interaction between a tire and road or off-road surface conditions. Below, various methods of modeling and validating tires are presented. The goal of this literature review is to determine what standards are best used in validation and to apply these techniques found in future research to ensure the model performs correctly under any condition.
Empirical tire models
Between 1969 and 1992, modeling and evaluating tire performance was difficult. There was a lack of available resources to produce high-fidelity models. Researchers used simple models to study the response of a vehicle at the ‘limit’ imposed by friction. These models provided adequate results that matched physical test data. 1 The models also helped to understand the effects of loading and inflation pressure on static stiffness. Researchers applied this data to a viscoelastic model of a radial tire, which exhibited similar stiffness compared to inflation pressure. 2 As modeling tires became more popular in 1992, Pacejka and Bakker 3 developed the semi-empirical magic tire formula. This formula describes the forces and moments from the road to the tire under various slip conditions, as shown in equation (1).

While the empirical tire model is widely used to fit data from tire testing and to predict forces at predefined conditions such as slip angle, camber angle, vertical load, and tire stiffness, it also presents several drawbacks. Chief among these are a lack of physical data fitting, steady-state limitations, and a lack of thermal considerations. Although designed to capture a wide range of tire constructions and operating conditions, the model cannot be fitted to the specific make or model of tire being researched. It also focuses on providing a steady-state tire characteristic curve, which does not offer dynamic insight into tire behavior and can therefore reduce the effectiveness of curve fits for individual tires. Finally, although the model originally accommodated a wide variety of tires, advances in tire technology have made it more difficult to capture minor performance changes when tire construction details are not well known.
Semi-empirical tire models
The semi-empirical tire model is an extension of the empirical tire model, which combined physical test data with a physical model that describes the tire as a damper. The simplified physical representation of the tire, along with the empirical data, was a step forward to ensure the modeled tire acts as the physical tire does. As seen in Figure 1, the simplified structure can include a flexible ring mounted on a rigid ring to show the damping effects of the sidewall. Though this is a step forward from the empirical tire model, which does not have a physical representation, the complexity of the model is still limited. These models are limited to point contact or fixed footprint interactions and, therefore, cannot be used for complex simulations that include contaminants.
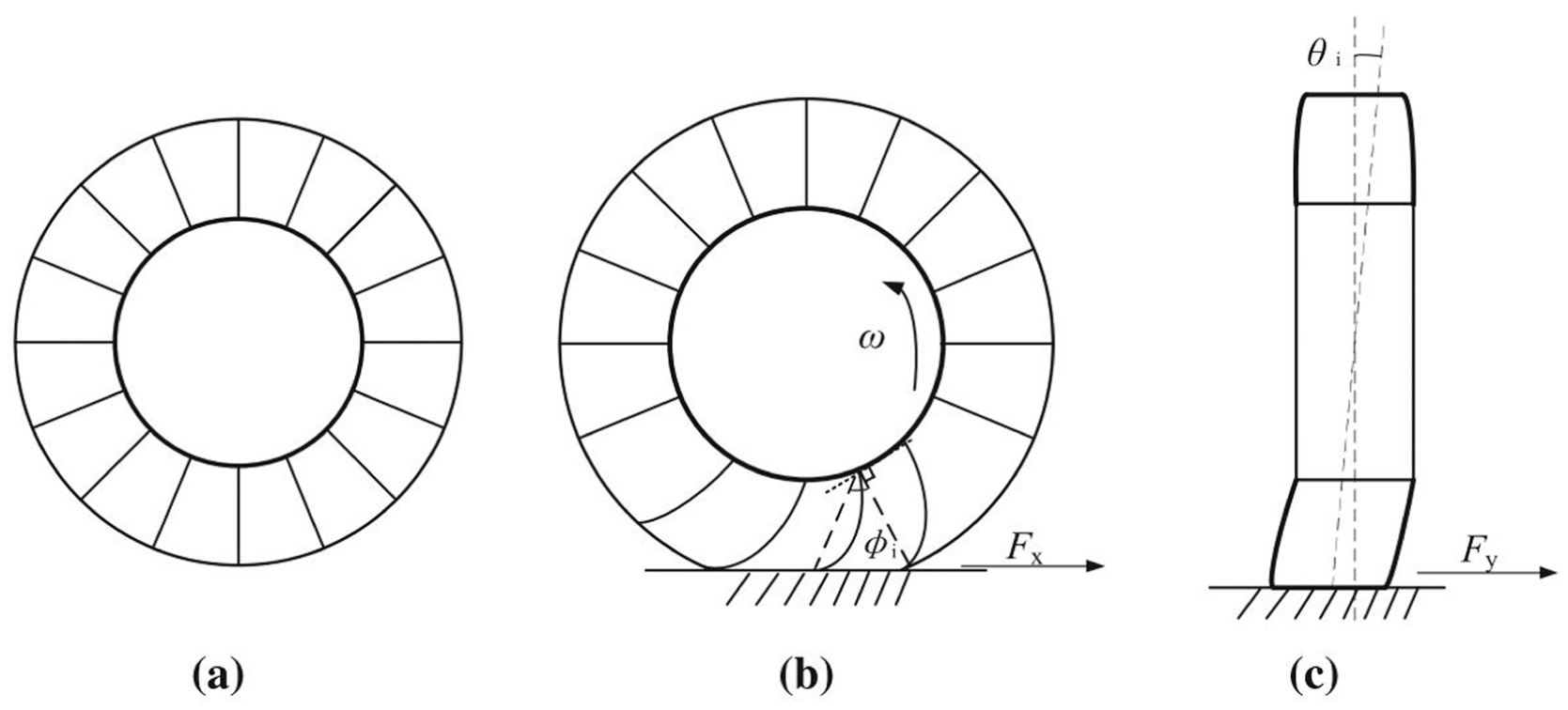
Forced deformation of the ‘HysTire’ under braking and cornering conditions. 4
In 2022, Duan et al. 4 modeled and validated two simple Hoosier tires to evaluate hysteresis properties for forced deformation of elastic materials. The tire seen in Figure 1 was assessed under the conditions of lateral and longitudinal force to understand deformation. The ‘HysTire’ model results were excellent in predicting the mechanical behavior of tires, as it showed the internal relationship for tire dynamics in the lateral and longitudinal directions. Though the model was validated under conditions of lateral and longitudinal force, the tire model was not validated under vertical static loading, which is important to capture how the tire deformation changes the cornering or driving forces.
Analytical tire models
Analytical tire models use 3-D finite element models to understand tire behavior, as they can be used to calculate forces such as longitudinal and lateral forces, as well as stiffness and friction. These models require specific adaptation to the tire, where stiffness, damping, load, and environment must be tailored to get accurate results. Although these analytical models can be adapted to deformable terrains, they still lack complexity because they are designed to be more computationally efficient than high-level finite element analysis of tires. Analytical tire models struggle to accurately predict forces under extreme loading conditions, such as low inflation pressure and high vertical loads. These conditions cause significant deformation in the tire’s footprint, which the analytical model cannot fully capture in the tread’s detailed deformation. However, the analytical tire model is a step above semi-empirical and empirical models, as it offers considerably more detail that can be adapted beyond the tire itself, especially on dry, clean road surfaces.
The brush model is a fundamental analytical tire model that represents a tire as a series of bristles, each functioning as a spring and interacting with the road surface. As these bristles interact with the ground, they deform and slip within the contact patch, allowing the model to simulate various forces such as slip, longitudinal and lateral forces, and contact pressure. This model gained popularity after 1952, when pneumatic tire research became more extensively documented. 5 While this model is the first to have a physical presence that deforms independently as the bristles deform, it remains basic and cannot accurately predict forces within the tire tread, as the tread is not modeled as a distinct material.
In 1999, a new tire model called the Flexible Ring Tire Model (FTire) was developed using ADAMS, aimed at evaluating vehicle ride comfort under handling conditions, especially when roads shift and high-frequency vibrations occur. 6 ADAMS is a multibody dynamics software commonly employed to model vehicle handling but was used to create a nonlinear tire that is described by a flexible ring to simulate stiffness when interacting with high-frequency road roughness. While understanding tire performance on such surfaces is essential, the model exhibits poorer performance on low-frequency roads.
In 2020, Lu et al. 7 combined a theoretical tire dynamics model and a rapid test method to obtain lateral and longitudinal characteristics. This method combined experimental results from an MTS test rig with an analytical model that could predict quasi-steady-state slip for three different loads. The data extraction resulted in a highly accurate model for lateral and longitudinal force. This model, however, should have included variable speeds. For the steering angle sweep test, only the load was varied.
Finite element tire models
Finite element tire models utilize engineering simulation software such as VPS, ABAQUS, Ansys, and LS-DYNA. These models can be constructed in software and simulated to move, allowing for visualization of stresses and extraction of forces to evaluate a tire’s response to given inputs. FEA tire models are complex and accurate representations of a tire, composed of individual components such as the carcass, tread, under tread, sidewall, bead, and plies. This enables precise control over each tire component, ensuring it closely matches a physical tire. While these models are less computationally efficient than simpler models, they rely on physical tire data and are specific to a single tire, allowing interaction with real-world road conditions or contaminants. Once validated, these models serve as close digital twins, providing accurate experimental results in place of physical tires.
In 2021, Rugsaj and Suvanjumrat 8 developed a dynamic finite element model of a non-pneumatic tire (NPT) to understand rolling mechanical behaviors of the NPT. The material model used combined a generalized Maxwell viscoelastic model with a linear elastic material to fit the results of tensile and compressive testing done on an actual NPT. To evaluate the dynamic response of the tire a drum and a flat surface were used with the same load of 14 kN and linear velocity of 11 km/h. The resulting spoke deformation because of stresses on the tire showed less than 10% difference from the physical tire.
In 2023, Kim et al. 9 presented the modeling of two radial passenger car tires in ABAQUS explicit. Their work focused on evaluating standing waves in free-rolling passenger car tires using dynamic FEA. During these tests, the tires moved laterally from the center, and the results were compared with experimental data. The simulation showed waves at 210 km/h, and these waves expanded with increasing speed, mirroring physical tire behavior. To better understand vehicle tires, the research should have included both free rolling and driven tires, as standing waves can form in both at high speeds.
Also in 2023, Wang et al. 10 modeled and shaped a radial tire using finite element methods from physical rubber subjected to cyclic load-unload tests at various strain rates. Using an elasto-viscoplastic model, the mechanical properties of the rubber were captured and used to shape the tire, including the rubber bladder and carcass. Once the shape was confirmed, the tire underwent a drum width test to ensure the shoulder flexion matched physical tire test data. Although the tire was not validated with typical static and dynamic testing, this was an important step in confirming the modeled tire’s proper strain response.
In 2024, Han et al. 11 developed a tire-soil interaction model based on a simple tractor tire and soil model in MATLAB/Simulink and CarSim. The test tire data was collected by the researchers and applied to the model. The goal was to understand the influence the lateral slope has on the dynamic characteristics of the tire. Using three speeds, the wheel slip rates increased as the tire lost stability on the terrain.
In 2024, Liu et al. 12 and Fathi et al. 13 modeled and validated radial ply tires by using variable material parameters for the tread, sidewall, carcass, and belts in FEA environments. Both assessments focused on static loading, comparing the deformation profiles of the contact patch and demonstrating accurate footprint stresses relative to the physical tire. A static tire footprint, shown in Figure 2, was verified to align well with manufacturer data.
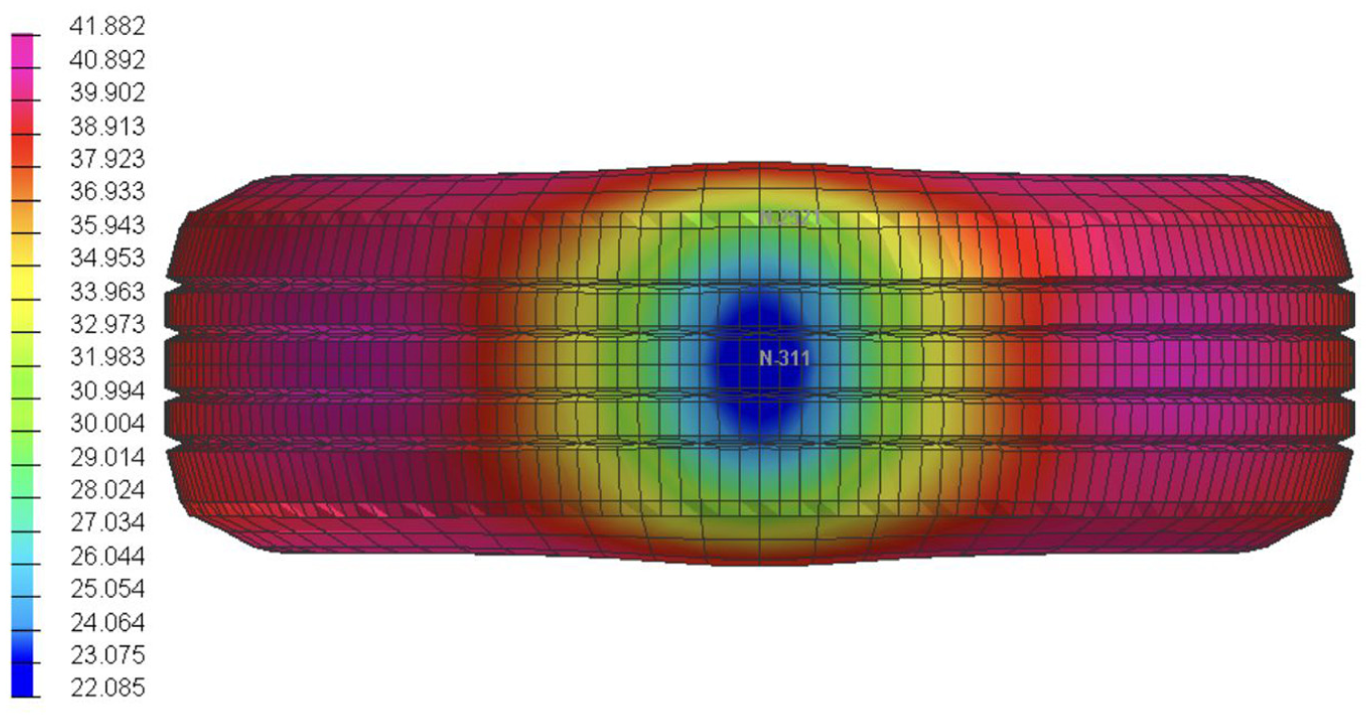
Nodal displacement of a static tire footprint. 13
In 2025, Lu et al. 14 simplified a finite element analysis tire model to address issues such as poor efficiency and accuracy that typical models have. The model was first created using viscoelastic material parameters and then verified through cyclic tensile testing and static verification. The detailed model was subsequently studied under dynamic test conditions such as lateral and longitudinal slip and aligning moment. Although this work can predict various forces with high accuracy, it falls short in predicting different operating conditions with the same level of precision.
In 2025, Ally et al. 15 assessed the efficiency of agricultural tires by employing the Improved Tire Model by Wong and Preston-Thomas in ANSYS to predict the tractive performance of a tire driving over a deep soil bin mesh. By varying the spacing of the lugs, it was determined that above 130 mm spacing, the reduction of active lugs decreases force transfer and increases soil disturbance.
In 2025, Ly et al. 16 modeled a high-fidelity Hoosier R25B 18X6.0-10 racing slick tire using American Society for Testing and Materials (ASTM) and Dynamic Mechanical Analysis (DMA) standards. The model was validated using a contact patch test, drum cleat vibrational analysis, static deflection, and rolling resistance tests. The model was well developed and showed little error compared to the physical model. However, the testing was done at low speed and may not perform as the physical tire is expected to at higher racing speeds.
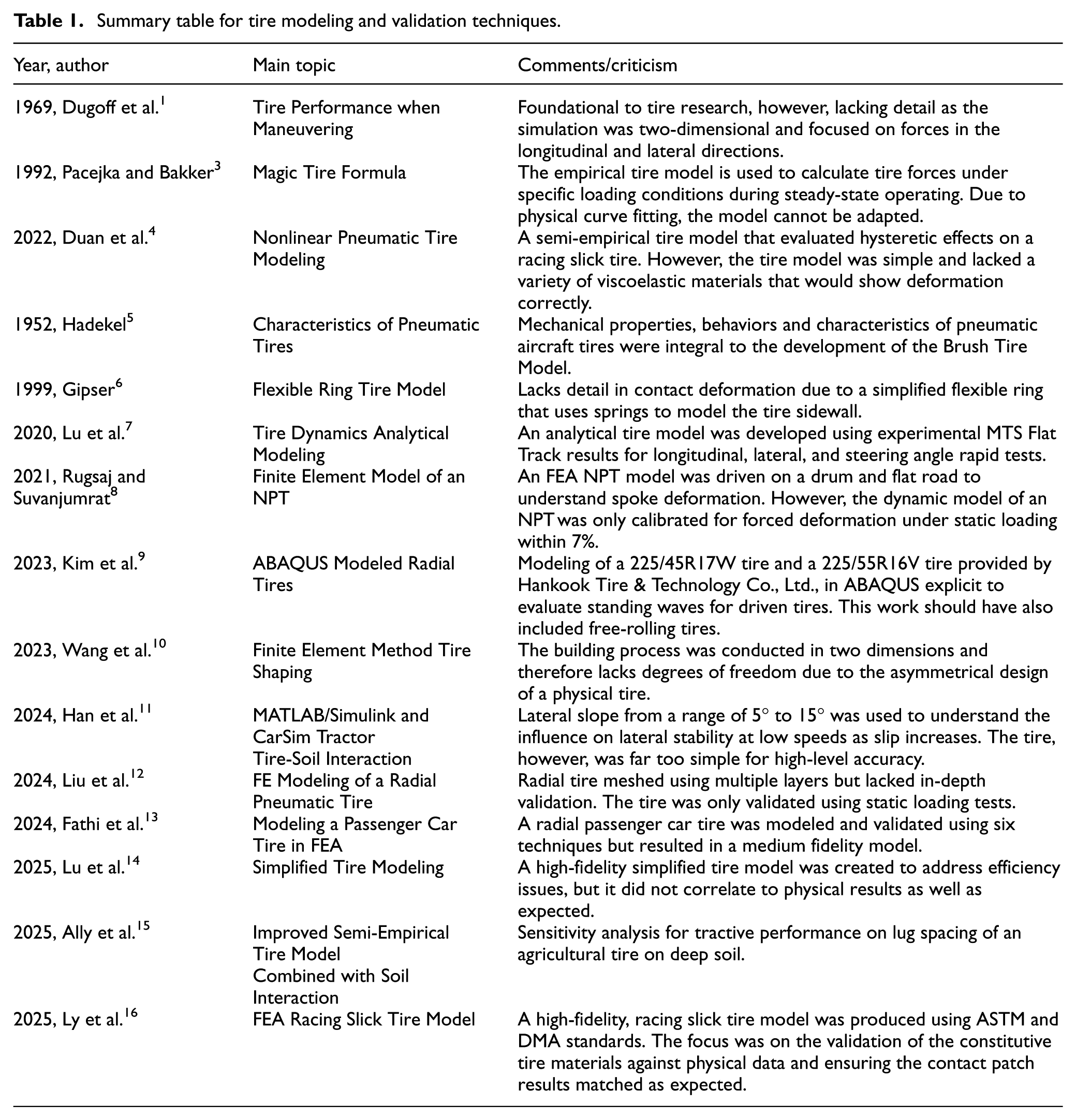
Many research groups have conducted tire modeling and validation. The main validation techniques include lateral and longitudinal forced deformation, free-standing waves, shoulder flection with cyclic load-unloading experiments, static loading for contact patch deformation, cyclic tensile testing, and verification for lateral and longitudinal slip. However, most researchers tend to validate their models using only one of these techniques and overlook the importance of multi-level validation that ensures the model’s reliability across multiple tests. To prevent invalid results, a multi-level validation approach must be employed to calibrate the tire, so it accurately predicts contact forces under any circumstance. Table 1 presents a comparison of validation techniques used in tire modeling.
Summary table for tire modeling and validation techniques.
Contaminated surface modeling and calibration
The section below presents material contaminant modeling and calibration using multiple techniques from DEM, FEM, and SPH.
Classification of road surface contaminants
Road surface contaminants are defined as organic or inorganic particulates that gather on road surfaces from vehicles. These contaminants can include tire rubber, engine oil, petrol, diesel, soil, sand, snow, ice, heavy metals, microplastics, or animal remains. When modeling surface contaminants, many researchers focus on uniform models. This ensures reproducibility and allows comparison between many contaminants under the same loading conditions. Many have researched deformable terrains such as sand, soil, clay, and snow. Below, methods to model and calibrate deformable materials are presented for research on off-road, truck, and passenger car tires. Research on modeling deformable materials is common, but their use outside of soil bins and pressure sinkage testing is less common. The goal of the novel contributions is to model and calibrate material particles that can interact with a tire on a rigid road surface. This reflects typical situations where most passenger car tires interact with deformable winter road contaminants.
In 1968 and 1971, Sapp 17 and Footit 18 evaluated tire traction on snow and ice using both a flatbed test machine and physical road conditions. Their work was crucial, as it provided a valid foundation for using imitation road conditions in current tire traction testing.
In 2020, Xu et al. 19 examined the tractive efforts between off-road tires and granular terrain in LS-DYNA to determine how tread pattern, vertical load, and inflation pressure can influence tractive effort. The granular terrain used was gravel in a soil bin, which increased the tractive effort of tires. The granular terrain, though important to understand how deformable surfaces change when tires interact with it, does not evaluate both driven and free rolling tires, which is important for any vehicle that encounters soft terrain.
In 2021, Carlson 20 studied the impacts of snow and rainwater on the rolling resistance of aircraft wheels at three different speeds with a constant tire pressure using a TUG. The results showed that increased snow depth and lower tire pressure gave higher rolling resistance. As the study aimed to understand the fuel efficiency of vehicles, they did not bear in mind the importance of traction for these vehicles in snow and rain.
In 2022, Zeng et al. 21 measured the tractive interaction between an off-road tire and a granular gravel/sand terrain using a large flat track indoor bin. The results showed that the tractive effort increased linearly with granular size, although the findings had limited application to winter conditions. These tests, due to the granular size of the gravel and sand, provide insight into the use of gravel and sand as road contaminants, but do not account for varying terrain depths.
Numerical techniques for contaminant modeling
People have used FEA to model materials for nearly 60 years, and over time, it has been adapted to model solid materials. 22 The most commonly used techniques are SPH, FEM, and DEM, as they provide a particulate representation of the material being modeled. SPH employs a meshless technique that represents a large set of interacting particles with a predefined contact distance. Each particle is then assigned properties such as mass, density, modulus of elasticity, and shear modulus to ensure that particles interact with the tire as they would in real life, with the same mass, density, velocity, and final position after interaction. On the other hand, FEM models deformable terrain using a finite mesh of elements to predict how the terrain deforms when a tire drives over it. Since the entire mesh is connected, any force applied to the terrain deforms the surface but prevents the material from developing internal shearing. However, it will leave patterns on the deformable terrain surface as the tire drives over it. DEM terrain models are meshless, using a collection of independent particles with their own material properties. The deformable terrain then interacts with the tire and with each other through contact forces, relying on Newton’s laws of motion. Both DEM and SPH terrain models are highly complex because they rely on the contact between thousands of individual particles, which requires significant computational power, and on calibration techniques within the software to ensure accurate interaction between the particles and the tire.
In 2011, Lescoe et al. 23 performed a sensitivity analysis on FEA, FEA-SPH and SPH soft soil-tire interactions. The soil was modeled using a uniform mesh of 25 and 12.5 mm to maintain a reasonable computational time and ensure accurate Von Mises stress was collected as the soil was loaded with the tire. The interaction was modeled to understand how rolling resistance changed during a towed tire test. The SPH particles produced the highest rolling resistance compared to the FEA mesh. Although the results required further investigation, the most accurate rolling resistance test used the SPH technique.
In 2020, Mousavi and Sandu 24 developed a theoretical model to understand tire-ice interaction. Since rubber compounds depend on temperature to generate traction, this study examined how much friction occurs in the tire contact patch when heat is produced and how the model can predict tire performance on ice. Using three tires with different rubber compounds, it was found that the average dry friction and total friction coefficients align with a physical model of the tire and created larger wet regions when friction was higher. However, this research requires further investigation to understand how the rubber compounds used in the tire model influence the tire’s temperature in the contact patch on ice.
In 2020, Shahrokhabadi et al. 25 presented a framework to employ Bézier extraction to connect isogeometric analysis (IGA) with FEA. This numerical method was developed for unsaturated soils to understand the strain localization under the Drucker-Prager yield model. The material used was dense sand and modeled using an IGA-FEA quadratic mesh. With the mesh model, strain localization was approximated with a higher-order and inelastic strain was better distributed within the elements.
In 2021, Gheshlaghi et al. 26 developed an analytical tire-terrain interaction model using finite element analysis for a truck tire size 315/80R22.5, analyzing interactions with various terrains such as dry clay, sandy loam, and sand at three moisture levels. The terrains were modeled with an SPH technique and a node-to-segment contact model for soil particles interacting with the tire. The model produced accurate results for rolling resistance, pressure sinkage, and cornering, validated before the tire’s interaction with soil materials. However, this research does not include driven tires on soft terrain and how that affects sinkage.
In 2023, Wang et al., 27 Shenvi et al., 28 and Surkutwar et al. 29 studied the tractive effort of FEA winter tires on snow-covered pavements to determine how ground contact diminishes with increasing snow depth and at which point the highest tractive effort coefficient occurs. All three teams used SPH and DEM for particles on the road surfaces to understand how snow yields when impacted by vehicle tires.
Also in 2023, Tekade et al. 30 simulated vehicle performance on icy and snowy terrain using a sedan model in Adams Car. Testing scenarios included straight-line braking, constant radius turning, and double lane changes on surfaces with varying coefficients of friction. The simulations showed that All-Wheel Drive (AWD) vehicles performed better on snowy and icy terrain, whereas the Four-Wheel Drive (FWD) vehicles excelled under normal conditions. This work is crucial for understanding the limits of vehicle acceleration in the longitudinal and lateral directions when on icy surfaces. It does not, however, include tractive effort comparisons between the different drivelines on these surfaces.
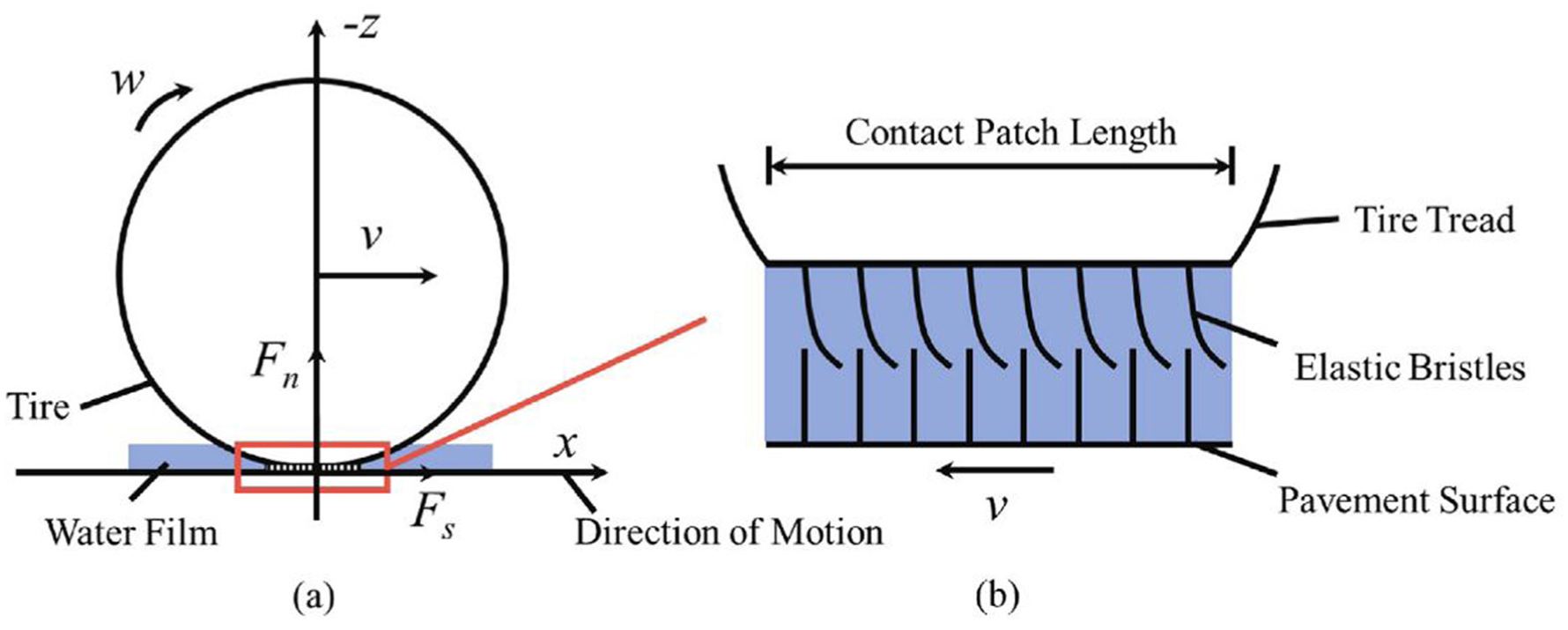
In 2023, Zhu et al. 31 developed an FEA modeled tire size 175/65R14 for both summer and winter tires that interacted with snowy roads under different velocities. The model was developed to understand the friction coefficient between a tire and the snow, as a water film was created due to the heat generated by the tire melting the snow, as shown in Figure 3. The results of the simulations showed that the friction was overestimated for both summer and winter tires; however, they did reveal a trend where friction decreased as velocity increased. Although this work is important for predicting a low-speed friction coefficient, it lacked the use of varied snow depths and an evaluation of friction at road speed.
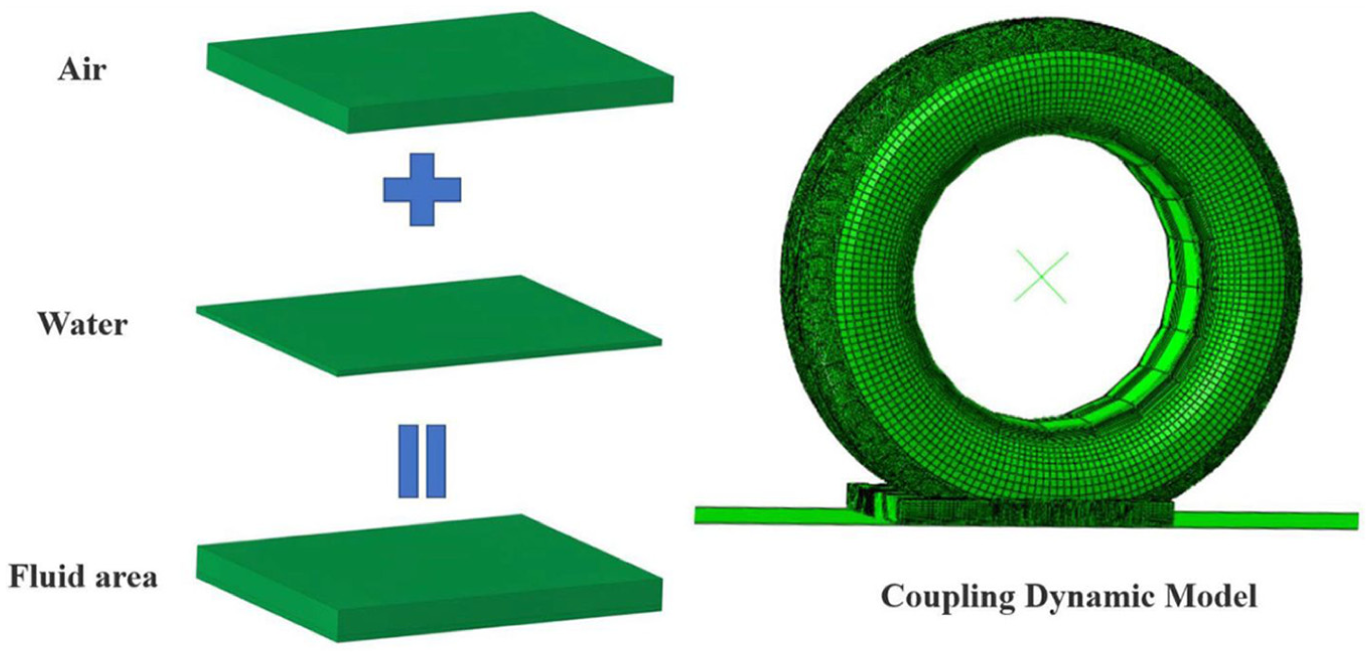
Coupled dynamic model to account for air in snow. 31
In 2025, Bendine et al. 32 used ANSYS to model ski-snow contact dynamics. Within the simulation, the snow was modeled using a mesh for 3D solid elements, and a surface-to-surface contact was applied to the snow and ski. The purpose of the analysis was to understand how pressure is distributed and absorbed by the snow. This technique could be applied to driven tires on snow, as deflection of the snow occurs under driven conditions.
Material constitutive models for contaminants
Many researchers model deformable terrains, such as sand, soil, clay, and snow, for off-road vehicle tires and winter conditions. These terrains are easier to replicate in a lab than temperature-controlled materials like slush, ice, or different snow densities. In FEA environments, deformable terrains can be modeled as cohesive materials or deformable structures and are often meshed. For compacting materials like snow or slush, it is common to model them using the modified Drucker-Prager cap model or as individual particles. Regardless of the method, the material properties must be defined, including parameters like cohesion or internal friction angle, which need to be input to a material card. In FEA, material cards are usually numbered and defined for elastic or plastic behavior. In VPS, Material Type 7 is a hydrodynamic elastic-plastic material, while in LS-DYNA, Material Type 7 is a rubber material. In VPS, Material Type 28 is a Murnaghan Equation of State model used to represent fluids like water. These two material cards in VPS are important, as they are commonly used for SPH modeling in VPS. Granular materials behave elastically and plastically, and water is important for studying wetted materials and hydroplaning.
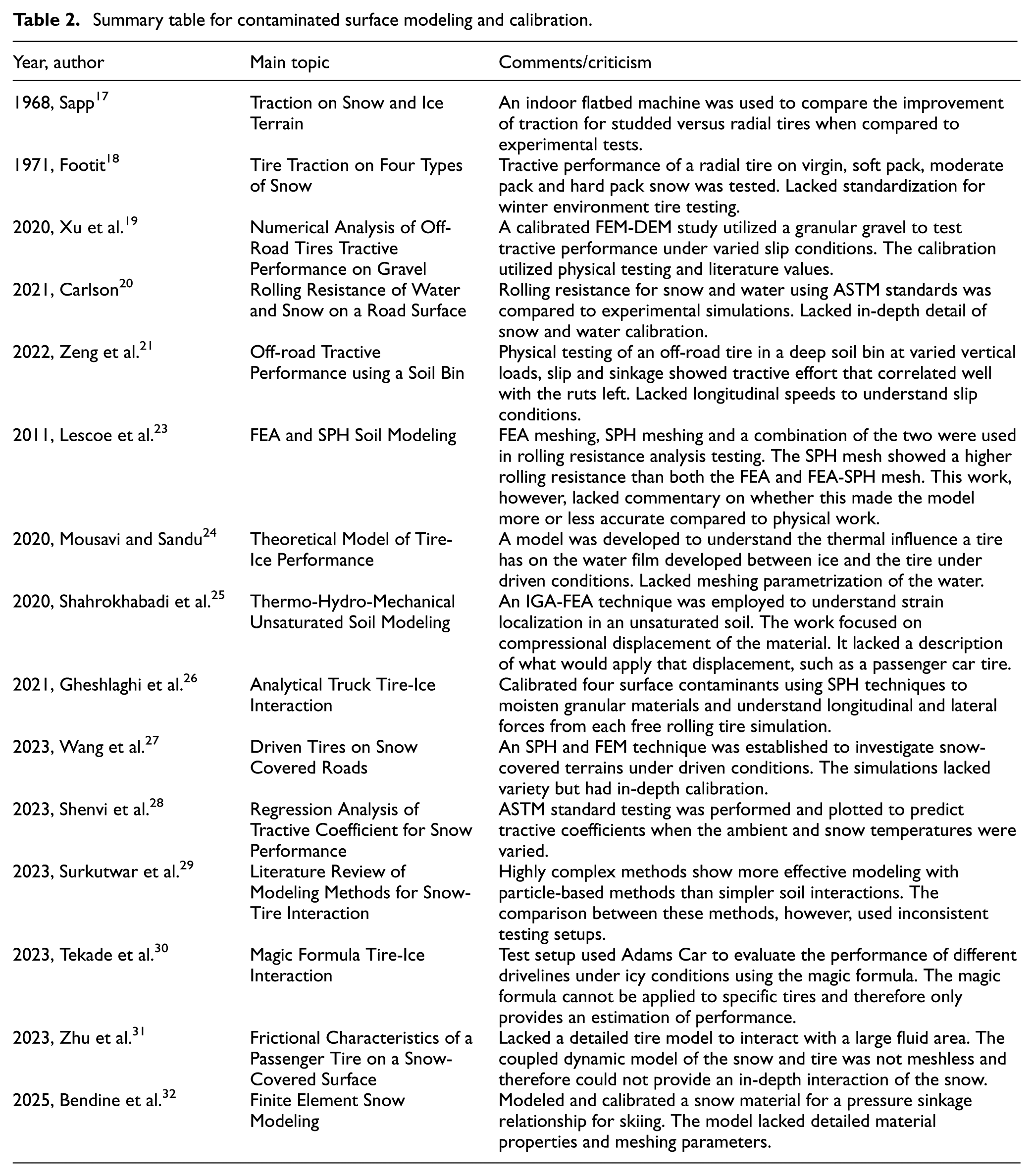
In Table 2, surface modeling and calibration techniques are presented with a focus on FEM, DEM, and physical testing.
Summary table for contaminated surface modeling and calibration.
Tire-road friction contact algorithms
A contact algorithm is used to understand the development of forces in the contact patch of a tire on a road surface. In the section below for simulated tire interactions, many contact algorithms are available. These algorithms are suited for simple to more complex interactions. When contaminants are modeled on the road surface, numerous particles must interact with the tire mesh, requiring a more complex contact algorithm. The contaminant modeling technique used directly influences the choice of contact algorithm. SPH particles, due to their complex nature, require large deformation contacts with penalty enforcement. These contacts acknowledge the non-linear properties of the materials involved and use penalties to prevent excessive penetration between the tire and particles. FEM particles often use node-to-surface algorithms with penalties as well. These types of contacts base the force output on the penetration depth of the particles. Such contact forces are highly effective for high-velocity problems, as they focus solely on the slave nodes and master surface where the contact occurs. Other particles interact with one another but do not exert forces on the master segment, thereby requiring less computational power.
In the 1990s, researchers33,34 proposed simple tire contact models to better understand interactions between a tire and terrain. The first was a modified point contact tire model that employed several assumptions to ensure the accuracy of the transfer function prediction. The second proposed a dynamic friction model that envisioned the two contacting surfaces as irregular asperities, like bristles interacting. These studies laid the groundwork for many contact theories that reimagine how modeled tires interact with flat or curved surfaces and small particles.
In 2004, Nakashima and Oida 35 combined FEM and DEM analysis methods to model a basic tire-soil interaction, where the deep soil was modeled using FEM techniques and the surface soil was modeled using DEM techniques. This approach aimed to balance accuracy with reduced computational time. The results satisfactorily demonstrated the model’s ability to describe tire deformation and sinkage on soil. However, the model cannot overlap the two soil models, leading to internal shear between the layers.
In 2013, Hong et al. 36 proposed a tire-road friction coefficient estimation algorithm that applied the lateral deflection of the tire from the lateral acceleration. The algorithm used wireless sensors to obtain the contact patch profile under lateral acceleration and apply the information to a simple tire model. With this, they were able to estimate the lateral force and aligning moment, which could be used to directly solve the proposed nonlinear equations. When compared to the experimental setup, the estimated friction coefficients at low speeds were fairly accurate.
In 2020, Yang et al. 37 developed a combined discrete-finite element method, called Tire-Sand Contact, to accurately and efficiently detect contact between spherical discrete particles and hexahedral finite elements. The contact forces were calculated using the Hertz-Mindlin model across three zones: surface, edge, and node contact. This method was computationally inefficient because of the large number of sand particles, each a sphere that interacted with the tire tread, which slowed the process. As such, scaling this model to deeper sand or higher tire speeds would be challenging.
In 2021, Hu et al. 38 developed a two-stage model to estimate the tire-road friction coefficient (TRFC) in CarSim-MATLAB/Simulink. The first stage used a brush tire model to estimate TRFC, and the second stage calculated normal force and slip ratio. The simulations across three different coefficients of friction surfaces and various speeds showed very low percentage differences between expected and experimental friction values. While this approach demonstrated high accuracy for different friction levels, the model’s simplicity prevents it from being suitable for winter road conditions where interaction with particles is crucial. In 2022, Han et al. 39 proposed an estimation method for the tire-road peak friction coefficient (TRPFC). Most tire-road friction estimation rarely considers surface roughness, so reconstruction of a 3D road was performed, and a LuGre Tire model was used for the tire-road interaction. The estimation of the tire model on the road in the lateral and longitudinal directions should have been around 0.85, and the TRPFC model converged and fluctuated around 0.85 after 0.8 s. The drawback, however, was from the use of a LuGre tire model, which applied several single-point contacts in the contact patch of the tire with filters. This would risk the nuances of the 3D road having less effect than originally intended. In 2023, Guo et al. 40 presented an approach to calculating pavement coefficient of friction (COF) during tire–road interaction by distinguishing between acceleration and deceleration zones and examining the influence of tire rubber within pavement surface texture. Using four pavement types, they reported an average COF of approximately 0.06 under both wet and dry conditions, with only a 1% difference between measured and predicted values. Their model combined Hertzian and Persson contact theories to account for both rubber properties and pavement roughness in estimating kinetic COF. Complementing this dynamic friction-based approach, Chen et al. 41 used a pressure-sensitive film measurement system to investigate tire–road contact characteristics experimentally using two automobile tires and three pavement types. Prescale film (0.05–300 MPa range) was placed beneath the tire under static loading for 2 min, enabling the extraction of contact patch stress distributions via FPD-8010E software across varying loads and inflation pressures. While this method provided valuable insight into static contact stress patterns, it remains limited to stationary conditions. This method cannot capture the influence of surface roughness on tire behavior during rolling or driving, highlighting a broader gap between static contact characterization and dynamic friction modeling in current literature. In 2024, Zerbato et al. 42 developed a semi-empirical contact model that modeled the interaction between a tire and soil using MATLAB/Simulink, as seen in Figure 4. The model was based on Bekker’s pressure-sinkage model and the Mohr-Coulomb failure criterion for tire rubber. It was found that the model was suited to accurately model the performance of an off-road vehicle in varying circumstances when the force in the tire reaches the longitudinal thresholds set. This research was very important as the contact model described accounted for the tire rubber, varied drivelines for the vehicle and a pressure-sinkage model for deformable terrains, but for this work, the only aspect that could be improved is increasing the speed of the tire.
Simulink block diagram used to describe the contact and vehicle model. 42
In 2024, Zhao et al. 43 developed a semi-theoretical tire-pavement friction model to evaluate the effect wet pavement had on the safety of a driven vehicle. The friction model used was a modified Average Lumped LuGre method, as seen in Figure 5, to assess the influence of a thin water film on the contact patch. The findings indicated that increased velocity and water thickness reduced the friction coefficient for both experimental and simulated results. Although this model can accurately predict frictional forces when speed and water film thickness change, it remains very simple and cannot precisely represent the footprint of a tire.
Average lumped LuGre friction model. 43
In 2024, Bürger and Naets 44 employed an Abaqus example FE tire model to help refine the node-to-surface contact algorithm used. The contact algorithm relies on master-slave contacts, where the penetration of the slave body into the master generates a counteracting force. This creates a gap between the two materials, and the contact force is then calculated. By applying the Arbitrary Lagrangian Eulerian method, the gap decreases, and both efficiency and the accuracy of the contact forces are improved. To further enhance the model, a complex 3D tire should be used instead of a simple smooth tire.
In 2024, Lampe et al. 45 developed an estimation method for tire-road friction on sloped roads. Using physical test data, the estimation algorithm employed an unscented Kalman filter to predict friction on a dynamic vehicle model. The model accurately predicted and corrected estimates for tire forces, lateral and longitudinal dynamics, and inertial measurements.
In 2024, Cornejo et al. 46 introduced a framework for analyzing frictional contact between composite materials such as rubber and road surfaces. They utilized a Goodyear GT2 195/65R15 tire and a contact model that combined a Dual Augmented Lagrangian Multiplier Method with the Mortar method. This approach was proposed to overcome the limitations of the standard Lagrange multiplier, which faced issues with inequalities that increased computational time and reduced accuracy. The method allowed for understanding how rubber and steel materials, representing the road, with vastly different behaviors, interact under static loading conditions.
In 2024, Millan and Ambrósio 47 rethought a tire-road contact model with direct contact detection, using an algorithm that derived tire contact forces from the relative motion between the two bodies. The contact detection algorithm employed a triangle mesh for the road, while the tire was modeled as a tyroid mesh. The tire forces were evaluated using a University of Arizona tire model, previously validated in other studies, which confirmed its ability to produce smooth tire-road contact forces. From a meshing perspective, finer meshes required more time to evaluate tire forces but offered decreased accuracy, as the points of contact are too close together for the computational sampling time.
Recently, in 2025, Zhao et al. 48 developed a novel approach for estimating the TRFC of three HANKOOK tires. The estimation of TRFC was achieved by adapting a self-diagnostic database for variable road conditions. By combining images of the road with vehicle dynamic information and analyzing the results, the TRFC was estimated in real time using an adaptive Unscented Kalman Filter. This innovative method for determining the friction coefficient between the tire and the road is crucial for new vehicles that aim to incorporate autonomous features and maintain safety. Although the collected data exhibited a wider variance than the baseline data, the estimator can be improved with additional data collection and training.
This section presents tire-road frictional analysis in both physical and simulated domains. The choice of the contact algorithm used is vital when interacting with particulates on a road surface. If the contact algorithm is too simplistic, as many in the literature are, the tire footprint will not interact with small particles, leading to inaccurate force feedback. While many contact algorithms are accurate for basic interactions, few can be scaled to effectively handle particulates. The goal of understanding this gap in knowledge is to select a contact algorithm that accurately represents a tire interaction with a contaminated road surface at any depth without producing simulations that are impossible to solve.
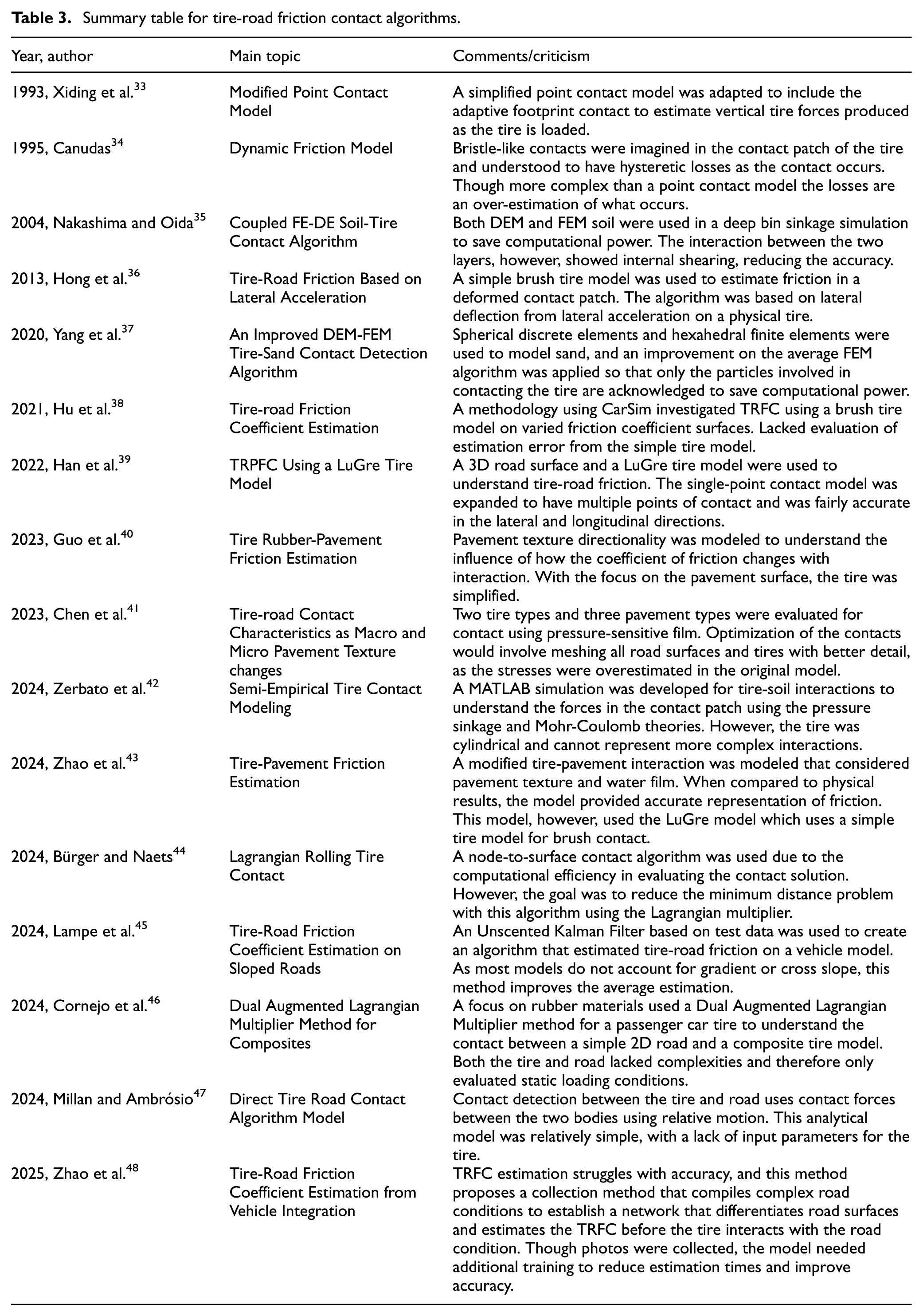
Table 3 presents a summary of tire-road friction contact algorithms used for tire-road interactions.
Summary table for tire-road friction contact algorithms.
Tire-road contaminant interaction
In the section below, tire-road contaminant interactions are described using several methods to understand how tires interact with service roads. Service roads commonly have surface contaminants that can reduce skid resistance, decrease traction, reduce friction, and overall reduce the stability of road conditions. Tire road contaminant interactions can include water, snow, salt, sand, petrol, and diesel on a rigid road surface. The most common tire road contaminant interaction is with rainwater; therefore, it is a highly researched topic and will be covered below.
Hydroplaning analysis
Hydroplaning is a common occurrence, often experienced during heavy rainfall when water accumulates on the road surface. When vehicles drive through rainwater, the tread of the tire floods. This creates a loss of contact between the road surface and the tire tread due to hydrodynamic pressure buildup. Hydroplaning is extremely dangerous and is one of the leading causes of traffic accidents, as the amount of rain that collects on roads cannot be controlled. Many research groups have modeled and investigated the effects of speed, inflation pressure, water depth, tread depth, and loading influence on hydroplaning. Their work seeks to design ways to avoid it. Hydroplaning was identified in the 1900s by the pioneer’s studying hydrodynamics for aircraft tires.49–54 During takeoff or landing, aircraft tires move at high speeds and encounter more fluid than can be expelled by their simple linear treads. This makes them more susceptible to hydroplaning. The National Aeronautics and Space Administration (NASA) has spent significant funds to help research groups understand the speeds at which hydroplaning occurs. These groups were able to encapsulate a hydroplaning estimation in equations (2) and (3).

Where,

Where,
In 2020, Anupam et al. 55 modeled and evaluated the effects of skid resistance when ambient temperature and pavement temperature vary in finite element (FE) software. The interaction between the tire and the road surface was tested using five road models. To calibrate the tire model, an ASTM E1844 GripTester was used at 50 km/h, with an ambient temperature of 33°C and pavement temperatures of 44°C. The same field conditions were then applied in software and validated against the physical data. However, this research lacks validation of the same pavement surfaces for tractive effort and rolling resistance.
In 2020, Behroozinia et al. 56 modeled and validated an FE tire in ABAQUS against physical testing data collected using a tire test rig trailer towed by a truck, which could vary parameters such as normal load and speed. Using physical data, the FE model was calibrated against a tire-pavement interaction. The model then incorporated an intelligent, tire-based algorithm that monitored and maintained velocity, normal load, and friction in the contact patch during maneuvers, using accelerometers, piezoelectric strain sensors, and pressure sensors embedded in the tire. Given the varied loading and speeds, it is important to gather similar data sets on different road surfaces so that the intelligent tire algorithm can estimate friction under various weather conditions.
In 2020, Ding and Wang 57 investigated the hydroplaning risk of truck tires using fluid-structure interaction models. Three tires sized 11R22.5, 425/60R22.5, and 445/50R22.5 were evaluated in ABAQUS at 96 km/h, where the contact patches of the three tires shown in Figure 6 demonstrate each tire’s ability to evacuate water at three depths. This research, as expected, confirmed that increased water depth lowers hydroplaning speed and that larger tires are more effective at evacuating water from the contact patch.
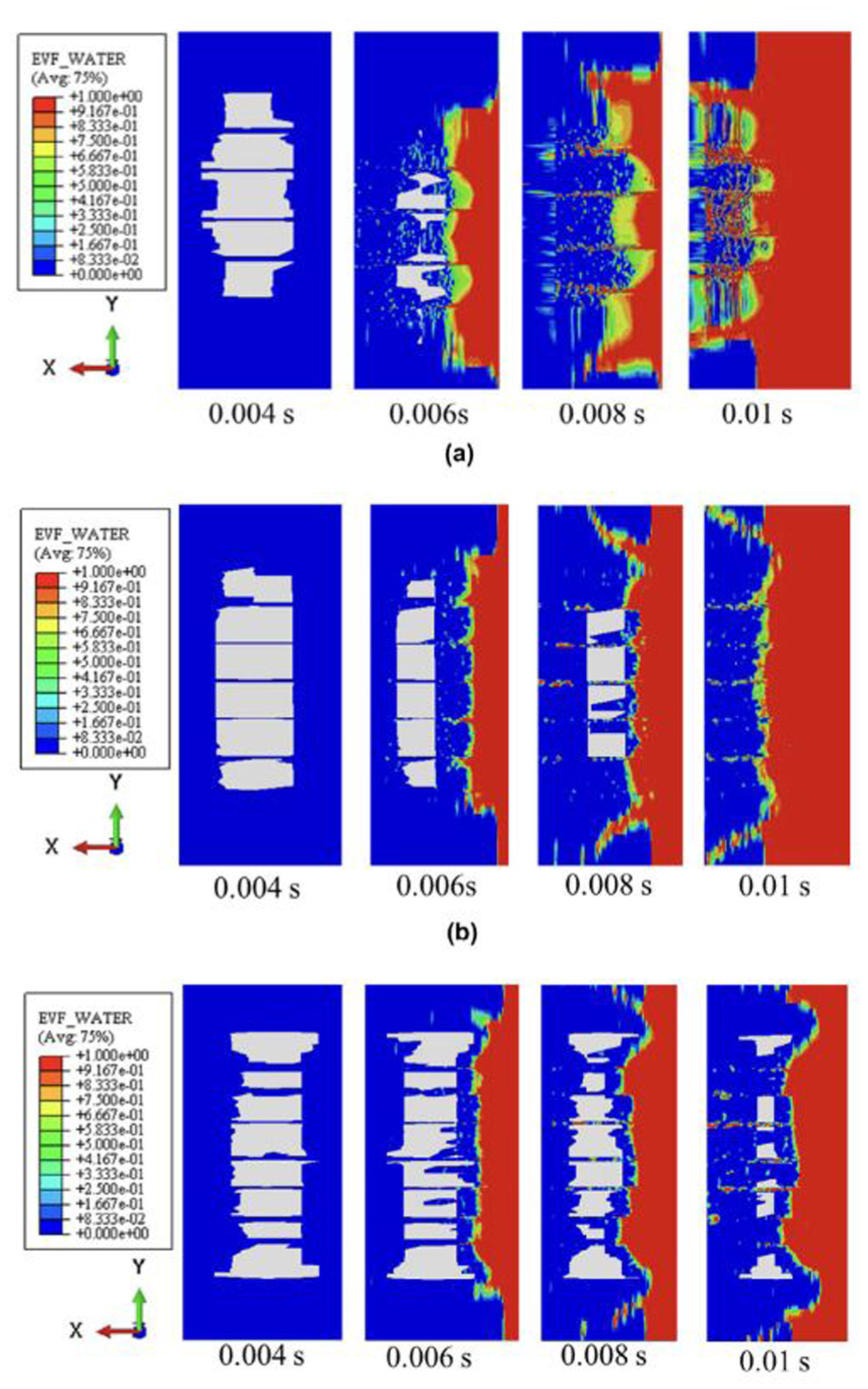
Contact patches for (a) single 11R22.5 tire, (b) wide-based 425 tire and (c) wide-based 445 tire at 96 km/h for three fluid depths. 60
In 2021, Maleska et al. 58 researched hydroplaning performance using the German Association of the Automotive Industry (VDA) test procedures for passenger car tires. The physical testing used a test track with a water depth of 7–10 mm and constant velocity. The laboratory testing used an indoor rig that recorded the footprint of two tires, one of which was free rolling, and the other was accelerating. The results showed that hydroplaning speed increased when wheel load and inflation pressure were increased. To improve this research, deeper water and varied velocities are important to understand how the tires will behave in any driving situation on residential or highway roads.
In 2022, Tao et al. 59 developed an FEA model using ABAQUS plug-ins and Python to analyze hydroplaning speed. With the modeled tire with four varying tread patterns, the tire was evaluated at speeds between 20 and 90 km/h. The wheel was loaded between 3.8 and 5.3 kN with increasing water thickness of 5 mm and 20 mm × 5 mm. The tire was then processed with the thickness of the water, tire pressure, and tread complexity to assess its performance under varying conditions. The findings showed a decreased contact area with increased speed when tire pressure and the thickness of water were constant. This work covered a wide range of conditions that a vehicle would encounter while driving through standing water.
In 2024, Yang et al. 60 modeled an aircraft tire in FEA and used SPH particles to simulate the water particles on a runway. With varying inflation pressures between 300 and 700 kPa for fluid depths from 0.75 to 7.5 mm, the group validated their model with the NASA equation and the hydroplaning speed reached at these pressures. The NASA equation, however, was developed for radial-ply passenger car tires. This influences the results; the rubber, plies, and inflation pressures vary between passenger car and aircraft tires.
In 2025, Deng et al. 61 evaluated a Michelin ENERGY XM2+ 185/65R14 tire over 7.684 mm of water using computational techniques to assess the dissipation of fluid from the contact patch, as shown in Figure 7. On a flooded surface, the tire was tested at various inflation pressures. The model could predict the hydroplaning speeds of the tire within 10% of the theoretical NASA-predicted critical speed. However, the model was most effective for assessing the hydroplaning speeds of low-pressure tires used on small vehicles. As a result, its accuracy may be lower when the tire is inflated to match a passenger car tire.
Tire hydroplaning model for fluid dissipation. 61
In 2025, Vilsan et al. 62 presented research on hydroplaning risks related to accumulated water on road surfaces based on average rainfall in Maryland, United States of America. The average rainfall indicated water film heights up to 1.9 mm, which poses a significant risk to drivers with worn tires traveling at highway speeds. Using the Gengenbach and Gallaway models, the study compared factors such as speeds, tread depth, inflation pressure, and pavement texture to identify which elements increase or decrease hydroplaning speeds. The research concluded that greater water film thickness leads to lower critical hydroplaning speeds, consistent with the NASA equations.
In 2025, Aboelsaoud et al. 63 simulated the hydroplaning phenomenon using a fluid structure in ABAQUS that combined the coupled Eulerian-Lagrangian fluid motion technique with a modeled 180/65R14 tire. As high linear velocity achieves hydroplaning, the model was run with varied linear velocities, inflation pressures, vertical loads and water film thicknesses. The proposed model was compared to the NASA hydroplaning equation, and the model overpredicted the speeds at which hydroplaning occurs by a small percentage. This research work covers a wide range of operating conditions for a 180/65R14 and, therefore, confirms that their tire model is fairly accurate compared to the NASA equation over a large range.
Hydroplaning risk cannot be limited to a single set of parameters that guarantees a vehicle will hydroplane. The factors influencing hydroplaning include vehicle speed, load, tread depth, inflation pressure, water depth, and the road surface itself. Since hydroplaning can be hard to reproduce, simulations are often used instead of real models because parameters affecting hydroplaning can be easily adjusted. The NASA equation provides a good estimate of the speed at which hydroplaning may occur, especially when considering the effect of inflation pressure. However, this basic equation does not account for other risk factors such as vehicle load, tread depth, water depth, and road texture. Increasing vehicle load and tread depth helps reduce the risk of hydroplaning because the tires exert more force, maintaining contact with the road surface longer, even as hydrodynamic pressure increases. Greater tread depth allows the tread to effectively channel water away from the contact patch and maintain contact with the road. Conversely, worn tires reduce the ability to move water from the contact patch, increasing the risk of losing contact. Water depth and road texture can also heighten hydroplaning risk. If the water depth is too high, the tire tread becomes flooded, creating hydrodynamic pressure that lifts the vehicle off the road surface. Additionally, certain roads with poor drainage, due to the macrotexture of the pavement surface, can negatively impact hydroplaning.
Rolling resistance analysis
In 2021, Vieira et al. 64 evaluated how five tire types affected rolling resistance on two road surfaces. The five types of tires were all-season, summer, winter tires without studs, winter tires with studs, and winter tires with hard particles, all loaded to 4 kN with an inflation pressure of 180 kPa. Using a rolling resistance measurement trailer shown in Figure 8, the results indicated that the highest rolling resistance came from winter tires with and without studs. This research provided a good comparison between free-rolling tires and road surfaces; however, it could be improved if driven tires were considered, since no vehicle has all free-rolling tires.

Rolling resistance skid trailer. 64
In 2021, He et al. 65 used ABAQUS to model a 205/55R16 tire to simulate a tire-pavement interaction during braking and accelerating on a rigid road surface to study the characteristics of contact stress at varying operating conditions. The study effectively modeled tire-pavement interactions under various conditions but lacked a detailed examination of the implications of contact stress characteristics for pavement design.
In 2022, Ge et al. 66 investigated the interaction of tires and asphalt to optimize pavement surface design in FE software. The tire was modeled and validated using physical static compression testing and validated in simulations. To ensure the contact between the pavement and the tire, the contact was modeled using Signorini’s condition and Coulomb’s friction law. The tire and the pavement were tested under free-rolling and full-braking conditions to understand the contact stresses in the vertical, transverse and longitudinal directions. The simulations from this team only highlighted two pavement conditions and road contact, and therefore are used to validate the tire, but not to analyze varying loading conditions outside of 5 kN vertical load and 5 km/h.
In 2024, Vardanyan et al. 67 proposed a method to measure the adhesion coefficient between a pneumatic tire and a road surface. The road surfaces included: dry asphalt, wet asphalt, dusty and wet concrete, packed snow, ice and varying temperature conditions. The electromechanical device seen in Figure 9 was attached to the vehicle and collected signals to measure the coefficient of friction; these signals were measured against literature data to provide a confidence level in adhesion. This work, if applicable to simulation, would be very helpful in predicting adhesion as weather conditions change, but this product requires a significant amount of work to ensure it works on variable road surfaces.
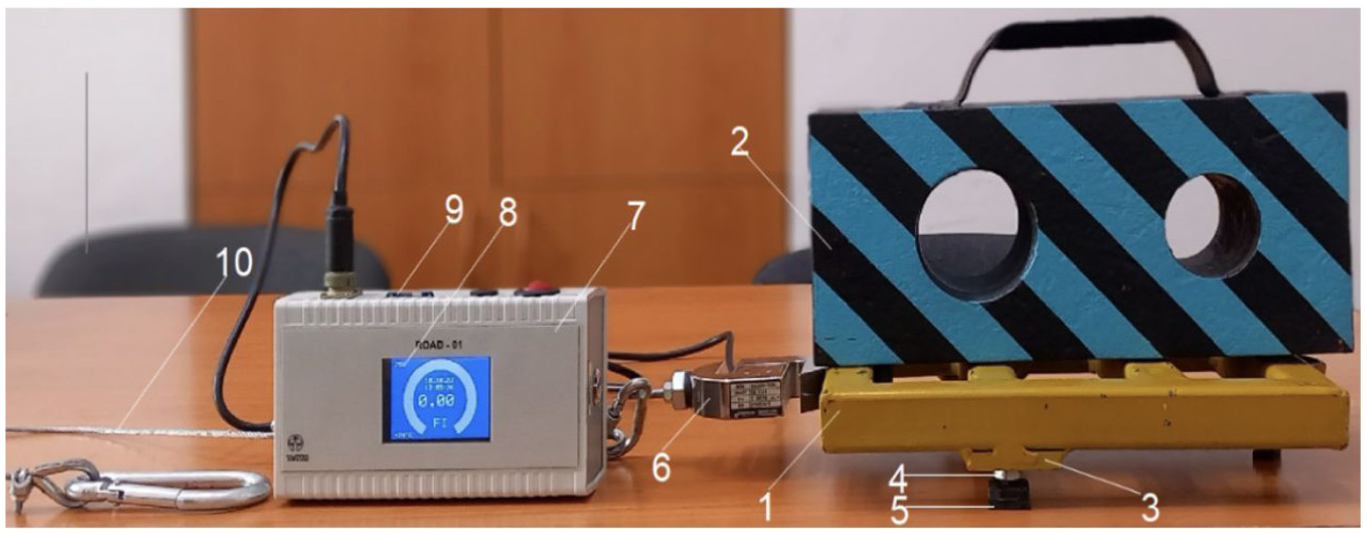
Device used to measure road adhesion coefficient of a pneumatic tire on a road surface. 67
In 2024, Fathi et al. 68 performed a literature analysis on passenger car and truck tires that were modeled in FEA. The work included tire-road interaction, friction contact models, tire temperature influences and various hyper-viscoelastic material models. The work discussed the shortcomings of these topics, specifically in tire-road analysis. Most work included one tire force rather than a comparison between many, such as traction, rolling resistance, cornering force, dissipation of viscosity energy, and hydroplaning speed.
In 2024, Abdelkarim et al. 69 performed simulations in ABAQUS to understand the interaction of tires on a micromechanical pavement surface. The full tire was modeled using viscoelastic material properties from Maxwell’s model. The pavement surface was generated using a computed tomography scan of physical pavement to compose the model and was converted to a three-dimensional mesh using tetrahedral elements. A surface-to-surface contact algorithm was applied to the tire tread and pavement. This was to understand the depth at which the greatest deformation occurred on the tire and the pavement when the vertical load increased. If this model were used in the dynamic domain, this ABAQUS model could be integral to varied driving conditions.
In 2024, Liu et al. 70 investigated rolling resistance on a finite element dynamic model of a tire and road contact for pavement. The FE model of a 205/55R16 passenger car tire was developed in ABAQUS alongside the pavement made with three combined asphalt mixtures that met the structural requirements of asphalt in the Design Code for Highway Asphalt Pavements standards. It was found with the tire and pavement that increasing load increased energy consumption, increasing inflation pressure decreased energy consumption, increasing coefficient of friction increased energy consumption, and that the pavement stiffness increases only changed energy consumption by a non-noticeable amount.
In 2024, Zhu et al. 71 studied tire friction characteristics of a 285/70R19.5 tire inflated to 220 kPa and loaded with 9.8 kN under varied wet conditions when hydrodynamic pressure was built up underneath the tire at 50 km/h. An advanced LuGre hydroplaning dynamic model was developed to combine an arbitrary pressure distribution so that both dry and wet conditions with less than 1 mm of water were evaluated for friction coefficients between the tire and road. The only gap for this work would be to evaluate a higher amount of standing water, as 1 mm is not thick enough to flood the tread of a tire unless they are extremely worn.
In 2024, Wang et al. 72 modeled an ASTM-E524 smooth tire for skid resistance testing in ANSYS-FLUENT to evaluate the speeds at which the tire hydroplaned when inflated to 165 kPa and loaded to 4.8 kN. Compared to the NASA equation, the model produced simulation results within 2.35% of the theoretical results. The takeaway showed that increasing the micro texture depth of the road surface by 0.5 mm, the hydroplaning speed increased by up to 8.3 km/h. This review, however, lacked testing at higher vehicle speeds, with road legal speeds being up to 100 km/h; it is important to capture all speeds that passenger cars traverse.
In 2024, Marotta et al. 73 conducted research to analyze a neural network that could predict tire-road interaction forces using acceleration measurements and sensors such as inertial measurement units implemented in a passenger test vehicle. The network was used to predict the longitudinal, lateral and vertical forces exerted by the rear driven wheels. With thousands of iterations of the neural network, it was able to accurately predict the forces that are seen in both slalom and constant radius cornering tests. Understanding the forces between tires and pavement proves to be the outer limits of what a car can traverse, and with neural networks accurately predicting forces experienced by the car tire, researchers can focus on more complex reactions than those of dry, clean surfaces.
In 2025, Fathi et al. 74 modeled a passenger car tire in the size 235/55R19 and performed an investigation on the impacts that temperature had on the rolling resistance of the rubber in the tread. This was done by varying longitudinal velocities at varied loading conditions for a temperature range between −40°C and 40°C. Temperature plays a key role in rolling resistance in that a tire that experiences a temperature change between winter and summer conditions at low speeds of 10 km/h the tire experiences an almost 15% increase in rolling resistance. This shows insight as to why changing tires between seasons is important, as fuel efficiency has a high correlation to the rolling resistance of rubber for a vehicle. This model could have also been applied to a tractive performance test, as temperature also affects driven tires.
In 2025, Vilsan et al. 75 developed an intelligent tire system that measured the water pressure within the tread grooves of a 245/40R18 with a tread depth of 4.7 mm. Using water depths of 1.5 and 4 mm, they worked to understand the critical depth at which hydroplaning occurred. Using the shallow hydroplaning conditions, it was found that any depth of water higher than the tread did not reduce contact friction any further than it already had been reduced. The Tekscan A101 sensor that was used was able to accurately predict hydroplaning risk in both shallow and deep-water conditions, though it could not estimate the speed of risk, just the hydrodynamic fluid pressure.
Within the section above, a focus on tire road contaminant interactions from rolling resistance was presented. Those who focused on solid contaminants, like sand and salt, lacked comparison between contaminant depths, loading and driveline interactions using driven and free rolling tires. Those who focused on hydroplaning and the interaction with rainwater evaluated variances in tread depth, water depth, inflation pressure, vertical loading, longitudinal speed, and texture of the road surface. Although many who study hydroplaning focus on aircraft hydroplaning, the techniques used should be applied to all contaminant modeling. To gain insight into a full vehicle, both driven and free-rolling tire interactions for a vehicle across multiple seasons and weather conditions should be analyzed.
Traction analysis
In 2020, El-Sayegh et al. 76 performed modeling and validation of off-road tires and gravelly soil terrain interaction. The truck tire size 315/80R22.5 was modeled using FEA, and the soil particles were modeled using SPH techniques. The interaction between the tire and gravelly soil was presented as four axles of a truck, where the first tire was a free-rolling steering tire, the second and third were driven, and the fourth was a free-rolling push tire, as seen in Figure 10. It was concluded that the model was able to predict rolling resistance for the second axle with an error percentage of less than one, but the first drive axle had an error percentage of up to 20%. This tire terrain interaction allows for an understanding of how inflation pressures and vertical loading conditions negatively impact rolling resistance in comparison to dry and clean roads. This work did not, however, present the tractive effort or rolling resistance of the truck tires on pavement to compare different surfaces.
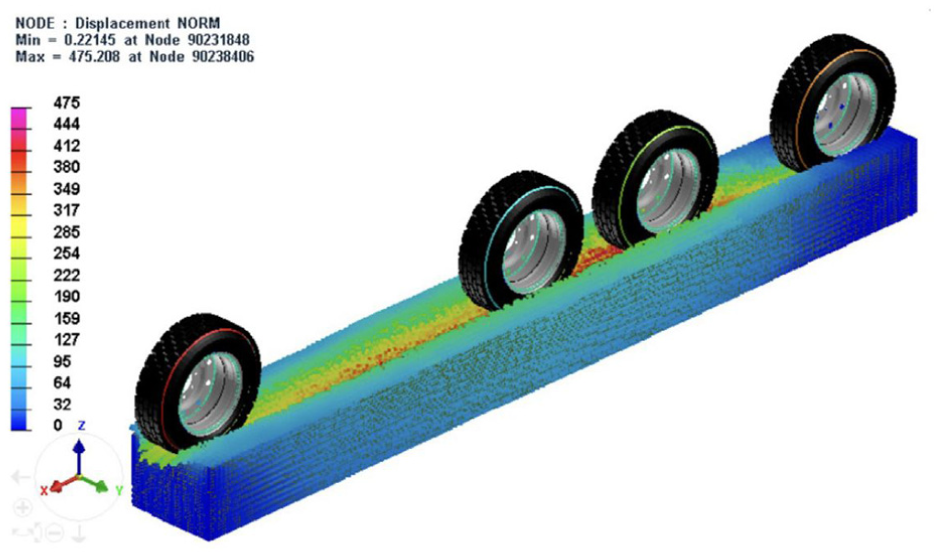
Four-axle truck tire setup on gravelly soil. 76
In 2025, Ran et al. 77 investigated the motion resistance of an A320 landing gear tire size 46/17R20 on a snow-covered surface using the Modified Capped Drucker-Prager model. This model is meant to simulate a cohesive geological material, such as snow, with high fidelity. This work modeled snow with depths less than 50 mm under large volumetric strains. This model is best used for scenarios where the snow is rapidly loaded, and both shear failure and pressure-dependent yield are common under high airplane loading scenarios.
In 2025, Cai et al. 78 evaluated the operation of a 46 X 17R20 aircraft tire using Mooney-Rivlin material modeling on a slush-contaminated pavement using the SPH technique. The model used six different densities of slush in modeling to understand the critical speed at which the aircraft loses contact between the tire and pavement when the fluid build-up below the tire decreases the contact area. The SPH technique was chosen for this research as the structured mesh that was required was automatically transformed into the particle clusters they wanted for a slush trough rather than a full contamination. They also used an improved SPH model that overcame the high-speed deformation problems that previously occurred for SPH models.
In 2021, Ružinskas et al. 79 performed tire traction performance tests with mixtures of snow and water, and crushed ice with water. Using an internal drum test bench, tire traction tests were performed at 4 kN vertical load, 220 kPa inflation pressure, with 0° camber angle at 50 km/h. These tests lacked the application of variable loading, inflation pressure and speed, which is important to understand how water, crushed ice and snow change the traction of tires when conditions change.
In 2022, Kurczyński and Zuska 80 analyzed the impacts that invisible ice had on road surface tractive forces by evaluating acceleration capability. To evaluate the tractive force, the transit van had to have stable conditions with the same maximum velocity, inflation pressure and loading used for the three tests. The results showed that, compared to dry roads and roads wet after rain, black ice provided the least tractive force but did not account for variable depths or thicknesses of the contaminants. Although there is likely to be minimal difference if conditions change, it is still important to capture these nuances.
In 2023, Zeng et al. 81 reviewed numerical tire-soil interactions to understand how soils deform and influence tractive tire performance in deep soil bins. The main interactions that were found in this paper correspond to tire-terrain interactions using deep soil bins with DEM, SPH, or FEM meshing. This work does not address high-fidelity models that interact using both deformable terrain and rigid road surfaces under variable loading conditions. The novelty of this research work lies in the influence contaminants on road surfaces have on tire performance, rather than in the terramechanical deformation of soil materials under variable loading conditions.
In 2024, Xiao et al. 82 studied the effects road particulate contaminants have on pavement skid resistance using three road surfaces and were measured with the British Pendulum Tester, which provided results when particle sizes were between 1.18 and 2.36 mm. The results showed that the surfaces covered with finer particles had higher friction levels, and the roughness of the particles determined the friction. Smoother particles were more likely to replicate a lubrication effect, and the tire loses friction. This research is important for understanding how granular terrain can affect friction on road surfaces, but it did not consider how larger winter abrasives will increase the surface roughness when granular terrain is applied.
In 2025, Bruno et al. 83 investigated the effects of cleaned contaminated surfaces on skid resistance. The investigation used both laboratory simulations based on experimental data and a Hamburg Wheel Tracking Device with a Pendulum Tester. The contaminants evaluated were petrol, diesel, engine oil, and brake fluid on a dense-graded asphalt concrete material. With hydrocarbon-based materials, skid resistance was significantly reduced, even after cleaning, which ultimately compromised pavement integrity. With hydrocarbons, they fill in the microtexture of the road surface and decrease skid resistance. No matter how effective the clean-up of the contaminant is, the hydrocarbon products are detrimental to the life of the pavement as they erode the material.
Many have studied how tires perform on wet, snowy, icy, and variable particle road surfaces to understand their interaction with particulates. However, the literature lacks comprehensive comparisons, which are essential for understanding how tires interact with surface contaminants. Most researchers focus on a single surface contaminant, speed, loading condition, or specific aspect like tractive effort or rolling resistance. While these are important for understanding basic interactions, examining only one condition prevents the identification of broader trends. Recognizing this gap, the aim was to develop comparisons for a single tire across various operating conditions, such as speed, contaminant depth, and load, for both tractive effort and rolling resistance. Both physical and modeled interactions are crucial for understanding how a tire interacts with deformable terrain. However, physical tests on deformable terrain are intensive, prone to errors from layering inconsistencies, and are often used only to calibrate simulations. Simulated experiments carry the risk of calibration errors not found in physical testing. Physical testing is costly and time-consuming, so many researchers prefer to use simulations. Complete physical testing cannot vary operating conditions as easily as those using simulations.
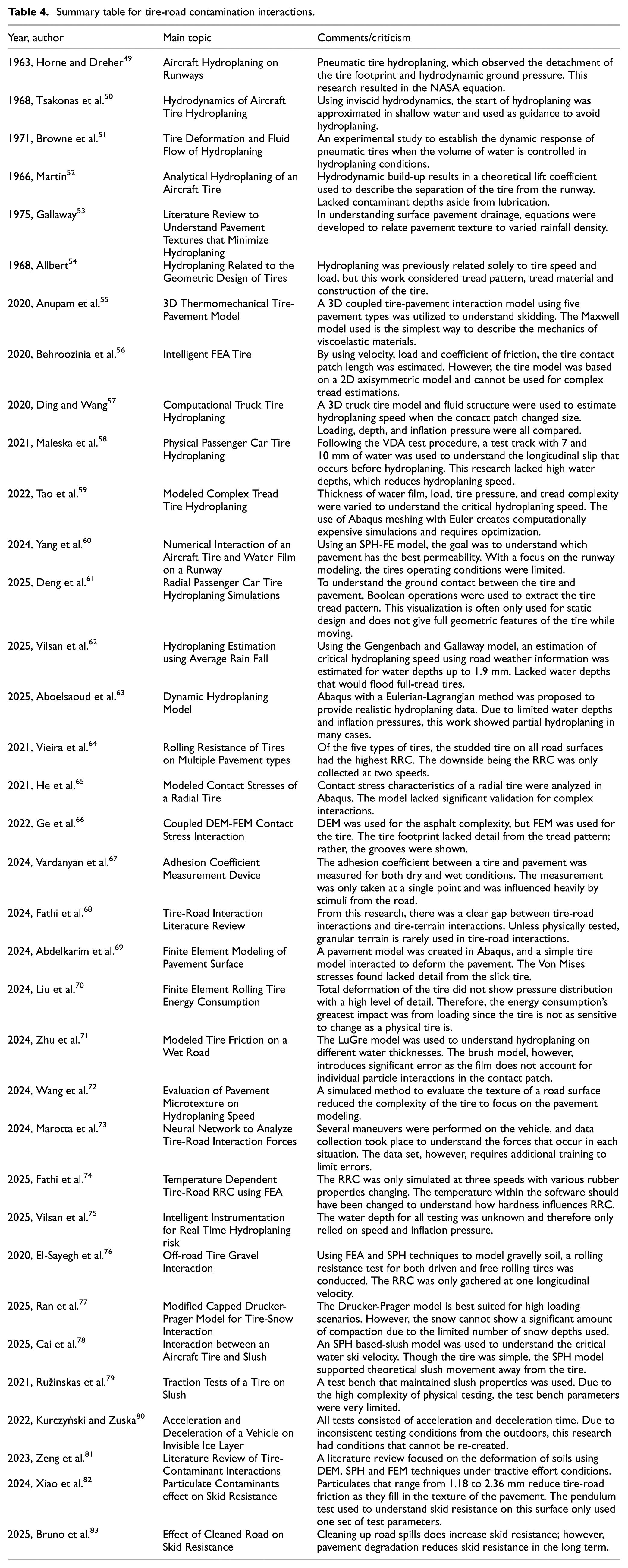
In Table 4, a summary of the tire-road contamination interactions, ranging from rolling resistance, tractive effort and hydroplaning, is presented.
Summary table for tire-road contamination interactions.
Conclusions
In the state-of-the-art review above, many researchers have worked to model and validate passenger car tires to understand how the tire interacts with a road surface using various techniques such as tractive effort, rolling resistance, hydroplaning, and a combination of these methods involving contaminants on the road. Much of the research presented above is highly focused on specific parameters and lacks the variability necessary to adequately evaluate passenger car tires. For example, in tire modeling and validation, many studies use a single validation technique—whether in static or dynamic conditions—and consider only one test to validate the tire. This approach, however, excludes the tire from being used in other scenarios unless validated through a multistage system. Regarding contaminated tire-road interaction, many studies focus on tire-contaminant interaction using soil bins but do not consider how layering the contaminant on a rigid road surface influences this interaction. This limits the research to understanding how the deformable terrain affects the tire, rather than how the tire interacts with the terrain. Furthermore, many researchers who have modeled tire-road friction in a simulated environment select contact algorithms that are best suited for tires interacting with smooth, flat, imperfection-free surfaces. These algorithms, however, are not easily adaptable to model interactions with particles and restrict the scope of the research, as contaminated road interactions cannot be effectively simulated. The same applies to tire-road interactions in general; many studies examine this interaction, but few consider additional materials that could be present on the road surface. This limits the research to a simple model of a tire on a rigid surface with perfect contact and friction, whether for driven or free-rolling tires. To accurately assess vehicle performance, both driven and free-rolling tires should be evaluated on rigid and deformable terrains. In contaminant modeling, there are also significant gaps, especially concerning deformable terrains. While many studies have examined soft terrains in large, deep bins, they often fail to investigate what happens when such terrains are on rigid road surfaces. In Canada, where salt, sand, snow, and water—all deformable terrains—accumulate on roads throughout the seasons, their interaction with tire treads is critical. The lack of models that incorporate this type of terrain on rigid surfaces creates a large gap between real-world conditions and simulation environments. Similar issues are present in hydroplaning modeling, where research tends to lack variation—studies often focus on a single speed, vertical load, and fluid depth, and compare results to the NASA equation. However, the NASA equation is only accurate under specific scenarios and does not account for factors such as pavement texture, high fluid depths, or variable loading. Therefore, researchers need to consider how changing these parameters—load, water depth, and speed—affects their results, rather than relying solely on a fixed set of conditions.
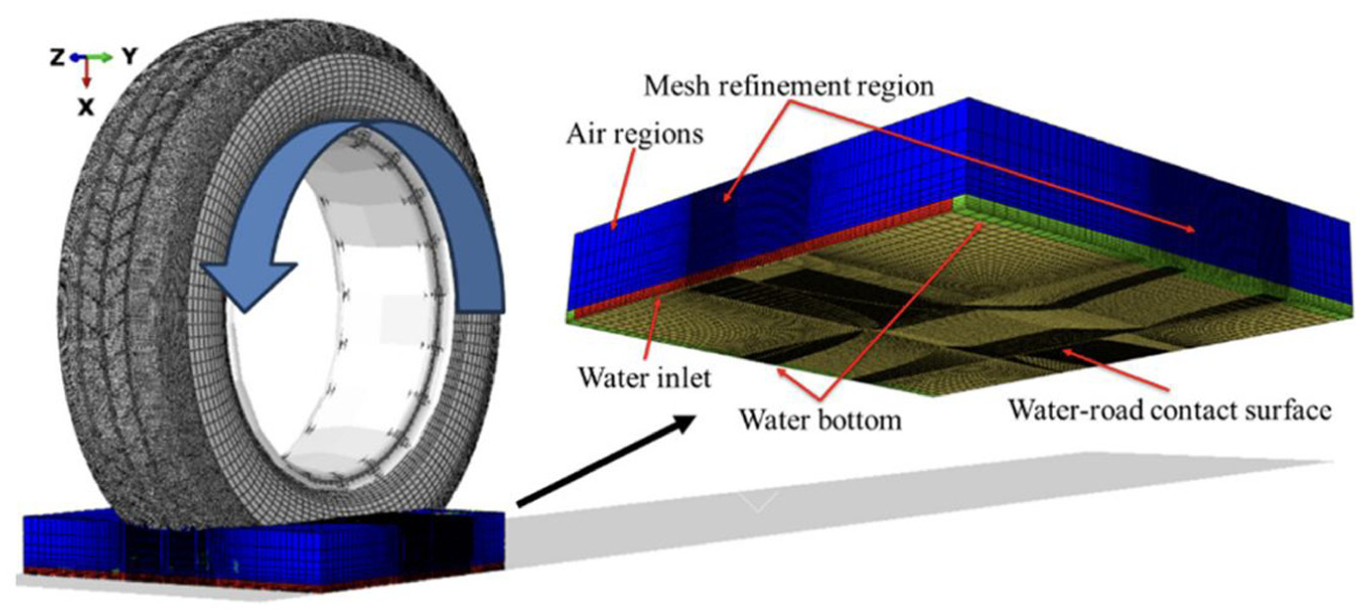
This literature review identified key gaps in existing research, including limited consideration of driven versus free-rolling tires, narrow operating-condition ranges, and insufficient integration of contaminant modeling with multi-level tire validation. Building on these findings, future work will focus on simulating both free-rolling and driven tires across different vertical loading conditions, longitudinal speeds, and contaminant depths for snow, sand, salt, water, and mixed snow–salt surfaces. To address these shortcomings, a high-fidelity tire model validated using several static and three dynamic techniques is employed to ensure reliable prediction of tire performance under varied operating conditions. Contaminant representation and calibration are achieved using a Smoothed Particle Hydrodynamics (SPH) technique, selected for its ability to capture large deformations and incorporate shear-based material characterization. This capability is essential for modeling cohesive materials that are not readily achievable using FEM or DEM approaches. Furthermore, a node-to-segment frictional contact algorithm with edge treatment is implemented to ensure physically consistent tire–particle interaction, preventing artificial penetration while maintaining stable contact. Collectively, this framework provides an organized and scalable approach for quantifying tractive effort and rolling resistance on contaminated rigid road surfaces, directly addressing key limitations identified in current literature.
Footnotes
Acknowledgements
The authors express their gratitude to the Natural Sciences and Engineering Research Council of Canada (NSERC Discovery Grant) for their continuous support during this research work.
Authors note
The authors formally declare that the content of this paper is their original work. It has not been published previously in any media, including journals, conferences, or websites. It is not being reviewed by any editorial office of publishers. All cited materials have been properly credited with citations in the contexts and the References section.
Ethical considerations
Ethical approval was not required.
Consent to participate
Not applicable
Consent for publication
Not applicable
Author contributions
Erin Fenton, Drafted manuscript and edited writing. Zeinab El-Sayegh, participated in the technical editing of the manuscript and reviewed the final document.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.