
Abstract
In order to improve the handling stability for four in-wheel motor drive electric vehicles (4IWMD EVs), a novel direct yaw moment control (DYC) strategy is proposed in this paper. To begin with, the problem formulation is stated by considering modeling errors and external disturbance. To obtain direct yaw moment output, a direct yaw moment controller is given by using conventional sliding mode theory at first. In order to deal with large gains of sign function, which brings severe chattering problem in conventional first-order sling mode (FOSM) control, an improved adaptive second-order sliding mode control strategy is proposed based on super-twisting algorithm (STA) to estimate vehicle model errors and external lumped disturbance. In addition, taking the cost problem in practice into account, an integral sliding mode observer (ISMO) is constructed to estimate and calculate the actual values of sideslip angle indirectly on the basis of STA. Furthermore, a composite control strategy is proposed according to stability analysis, combining adaptive second-order sliding mode controller with ISMO. Eventually, comparative simulations are conducted in Carsim and Simulink. The results show that proposed control strategy can achieve superior tracking performance under the premise of tackling chattering phenomenon, and the response curves are smoother. Meanwhile, the influence of uncertain disturbance proves to be weakened significantly with STA-based scheme while performances of other control strategies are seriously affected, which verifies the robustness and effectiveness of proposed control strategy.
Keywords
Introduction
In the context of increasing attention to environmental protection and energy saving, a growing number of researchers are devoted to the study of electric vehicles (EVs). 1 Electric vehicles have been around for the last century but they haven’t been widely embraced. 2 Due to the limitations of technological development, it is a headache that EVs tend to have poor performance while running on the low adhesion road, which may lead to traffic accidents. What’s more, the safety problem remains to be resolved. In recent years, the rise of four in-wheel motor drive electric vehicles (4IWMD EVs) is expected to overcome above disadvantages. 4IWMD EVs technology has become a far-reaching research direction in this field. 3 4IWMD EVs feature wheels driven by motors.4–6 Unlike traditional internal combustion engine vehicles, each wheel can be independently controlled by a drive motor. Consequently, the direct yaw moment control capability of 4IWMD EVs is superior and the deceleration effect of the braking yaw moment is reduced. 7 Thanks to the high precision and sensitivity of in-wheel motor control, 4IWMD EVs have significant advantages in stability and active safety control.8,9
Since traffic accidents pose a huge potential threat to drivers and passengers, it is necessary to conduct research on vehicle stability and safety control. In order to prevent vehicles from slipping and losing control, the lateral stability and maneuverability of a vehicle should be guaranteed. 10 Up to now, commonly used vehicle stability control systems refer to yaw stability or electronic stability control, including direct yaw-moment control (DYC), active torque distribution systems (ATD), active differential braking system (ADB), electronic stability program (ESP), etc.11–13 For 4IWMD EVs, adopting DYC to assure vehicle handling stability has inherent advantages.14,15 General vehicles need to be equipped with electronic differentials, while 4IWMD EVs can realize DYC conveniently in view of their own characteristics. DYC mainly consists of upper controller and lower controller. According to the steering wheel angle and vehicle motion intention, the upper controller generates appropriate yaw moment. Then, the lower controller allocates torque reasonably to each wheel so that the yaw motion can approach the desired state as closely as possible.16–18 Therefore, this paper is committed to improving the maneuverability and lateral stability of 4IWMD EVs by using DYC.
There have been many studies on control methods about DYC. In Mokhiamar and Abe 19 for the purpose of maximizing both stability limit and vehicle responsiveness, a cooperative control strategy is designed. By employing model response of sideslip angle and yaw rate, the paper combines yaw moment and lateral force simultaneously, which proves to be effective by computer simulations. In Mostefai et al. 20 the control system is constructed by a stabilizing observer-based control algorithm. Additionally, fuzzy rules are used to adapt local observers to whole control system. The controller working together with fuzzy-rule-based observer can generate direct yaw moment to compensate for deviations. In Wu et al. 21 the author proposes a novel adaptive model predictive control (MPC) scheme for direct yaw moment control. Results show the yaw rate signal is smoother and the closed loop control system is robust. Although the mentioned control schemes take the nonlinearity of vehicle system into account, these methods highly depend on the accuracy of the model, which would be affected by external disturbance. In addition, the influence of external disturbance should also be discussed, which would impact the robustness of control scheme. In order to make up for the disadvantages, the second-order sliding mode (SOSM) control is recommended and introduced in next paragraph.
When it comes to the uncertain disturbance and error in vehicle model, sliding mode control (SMC) is a good choice to control vehicle motions and design observers or differentiators. 22 It is well-known that SMC performs well in nonlinear systems with good robustness but the chattering problem is a headache. To deal with the chattering in general first-order sliding mode (FOSM) control, high order sliding mode (HOSM) control is proposed and applied, such as super-twisting sliding mode (STSM) control. In Chen et al. 23 a SOSM controller is combined with nonlinear disturbance observer (NDOB) to suppress the chattering phenomenon for path following control of autonomous vehicles. When it comes to nonlinear disturbance in control system, NDOB can estimate or monitor it and the chattering can be further weakened. In Abe et al. 24 a class of SOSM algorithm is presented based on a strong Lyapunov function, which can bring better performance by adding linear correction terms. SMC algorithm is applied after studying the effects of side-slip controlled by direct yaw moment in Abe et al. 24 In Ding and Sun, 25 a HOSM control called super-twisting algorithm (STA) is applied to design finite-time controller and sliding mode observer (SMO) to guarantee vehicle motions. To sum up, SOSM technique has attracted lots of attention and been applied to suppress the chattering phenomenon with excellent robustness. 26 In fact, to mitigate the effects of nonlinear uncertainties, state estimation or observer technology often works in conjunction with SOSM controller, which reduces reliance on model accuracy.27,28 Apart from suppressing chattering phenomenon, the adaptability of designed controller should also be considered and state observers are also necessary for unmeasured state variables due to technologies or other constraints.29,30 Compared with methods mentioned above, SOSM control strategy with observer is able to guarantee robustness and effectiveness for uncertain nonlinear system control without relying on modeling accuracy.
In this paper, the research object is to enhance the handling stability of 4IWMD EVs by means of DYC strategy. The main contributions are summarized below:
Two control strategies for upper controller of DYC system are introduced to generate direct yaw moment for improving handling and lateral stability of vehicle, including a traditional FOSM controller and an adaptive super-twisting sliding mode (ASTSM) controller. On the basis of general SOSM control, proposed ASTSM control can further compensate the shortage of heavy chattering in FOSM strategy by lessening the gains of sign function, in which the system disturbance can be estimated directly.
An integral sliding mode observer (ISMO) is proposed based on STA to estimate the actual values of sideslip angle to save the cost in practical application. According to Lyapunov stability theory, the designed state observer system proves to be convergent within limited time.
The rest of the paper is organized as follows. The dynamic model of 4IWMD EVs is established in Section II. In Section III, the whole DYC scheme is shown, including upper controller design of two sliding mode control theories, lower controller design and structure of proposed state observer. In Section IV, the co-simulation of Carsim and Simulink was carried out and analysis of results is presented. Finally, the conclusion is given in Section V.
Vehicle model and problem formulation
Nonlinear vehicle model
In most existing papers, the seven degree of freedom (7DOF) dynamic model is established to describe the nonlinear vehicle system. In order to consider torque allocation of each wheel, the 7DOF dynamic model of 4IWMD EVs is shown in Figure 1.
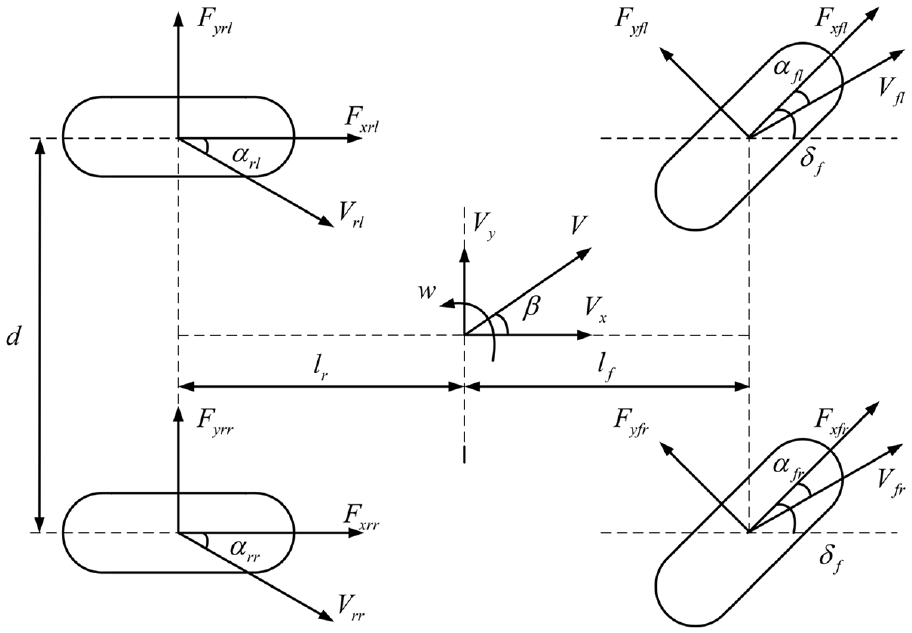
7DOF dynamic model of 4IWMD EVs.
Here,
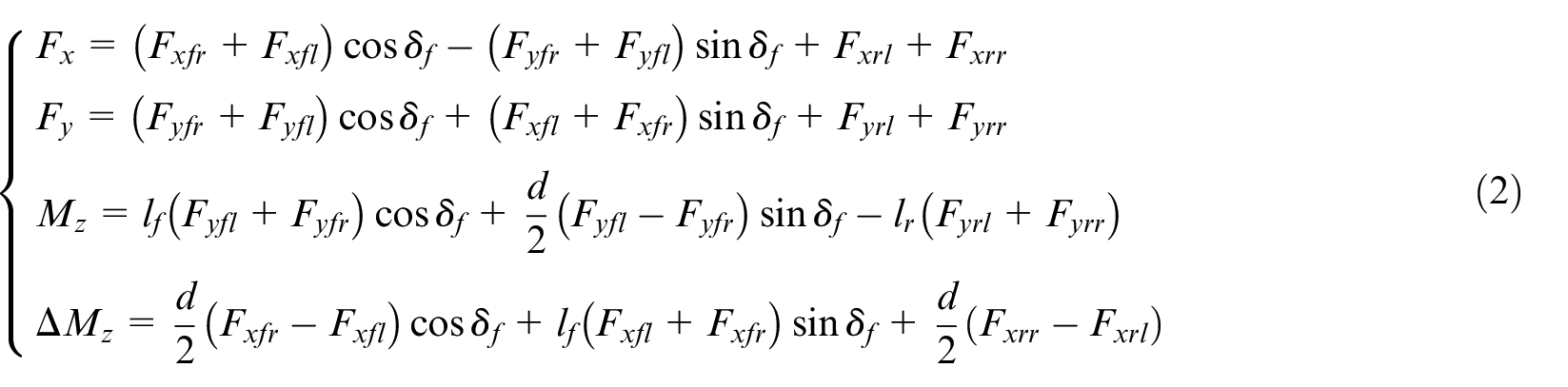
In line with 7DOF dynamic model, the vehicle dynamic equations can be expressed as
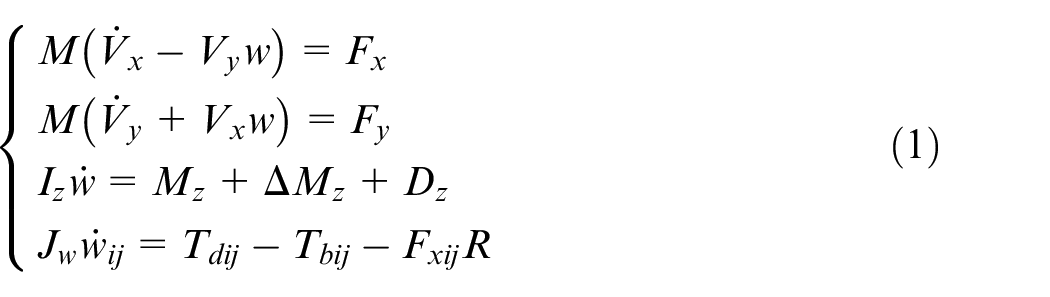
where
In the paper,
Linear vehicle model
A two degree of freedom (2DOF) dynamic model is given in Figure 2 as the linear reference vehicle model. The 2DOF dynamic model is established to derive reference control amount. For DYC system, the desired state variables generally refer to yaw rate and sideslip angle.
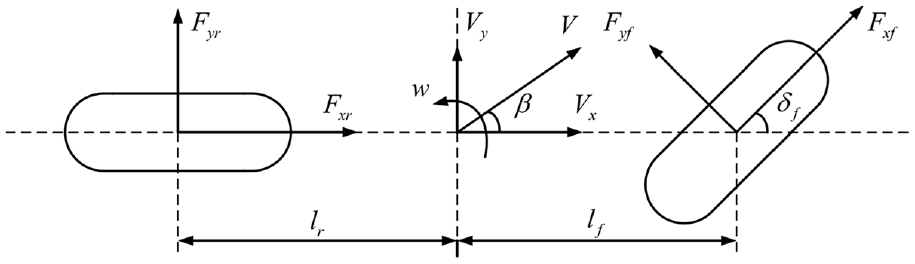
2DOF vehicle dynamic model.
The 2DOF vehicle dynamic model above takes the front wheel steering angle into account and neglects the influence of rear wheel steering angle. The longitudinal velocity is treated as constant here. The lateral and yaw motion can be expressed as

where
Furthermore, the slip angles of front or rear wheel (

Problem formulation
The purpose of the paper is to enhance the handling and stability of 4IWMD EVs. In order to achieve the goal, the yaw rate and sideslip angle should be controlled to approach their ideal values as closely as possible.
The reference sideslip angle can be set as zero for the stability and safety while running in critical conditions. In addition, the lateral stability of the vehicle will be ensured if the sideslip angle approaches zero. Therefore, the reference of sideslip angle is defined as

The ideal value of yaw rate can be derived from the 2DOF dynamic vehicle model under the premise of considering a constant forward velocity. Assuming that the front wheel steering angle can be measured and cornering stiffness coefficients of front and rear wheels are definite, the ideal value is
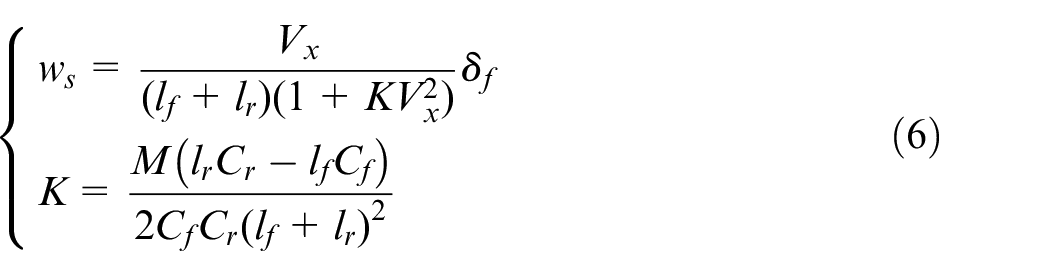
where
In reality, the maximum lateral acceleration is constrained, satisfying

To realize control targets, the direct yaw moment is calculated by upper controller as control law. Based on the output of upper controller, the task of lower controller is to allocate torque to transmit control commands to actuators to control each wheel independently.
To realize DYC strategy, it is necessary to obtain real values of yaw rate and sideslip angle to calculate tracking errors. With the development of sensor technology, both variables can be measured directly. However, yaw rate is treated as measured part but sideslip angle is regarded as unmeasured sate in most situations, since the sensors for measuring sideslip angle are too expensive. Taking expense problem into account, the state observer is usually employed to derive real sideslip angle indirectly.
To sum up, the main task for designed DYC controller is to generate control commands for 4IWMD EVs to make yaw rate and sideslip angle track the desired ones calculated from linear vehicle model. In addition, it is necessary to derive sideslip angle by proposed state observer. To be continue, two lemmas are listed in advance, which are going to play a role in the following parts.

where

where
Control system design
The whole DYC system is introduced for details in this section, constructed by upper controller, lower controller, and state observer. The structure block is shown in Figure 3. As is shown, an ASTSM controller plays a role of upper controller, which can inherit the robustness of SMC and alleviate chattering at the same time. Then, torque distribution is realized to each wheel by means of lower controller. As sideslip angle is the unmeasurable state variable in control system, an ISMO is employed here to estimate its real value.
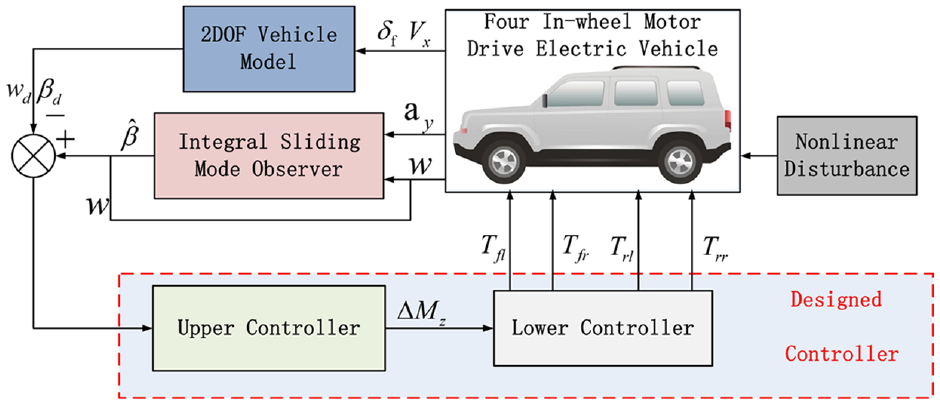
The diagram of DYC system.
Upper controller
(1) FOSM controller design: Before displaying the improved control method, a traditional sliding mode control strategy is displayed first. It is well-known that SMC is an important control strategy for nonlinear systems with uncertainties. Before giving the control law, the sliding mode surface is selected as

Here, the sliding mode surface contains the deviations of yaw rate and sideslip angle.
Combined with the vehicle dynamic equation (1), the derivative of sliding mode surface can be representable as
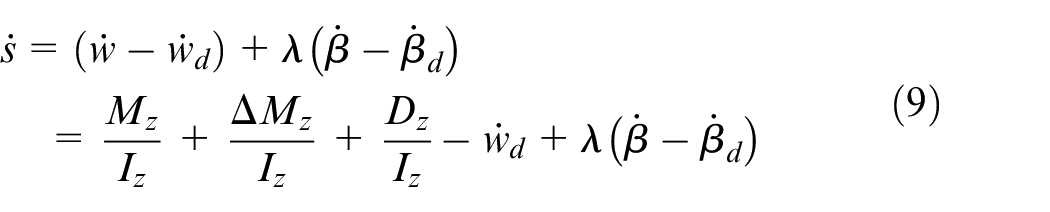
Define a new variable

Note that
Submitting (10) into (9), the derivative of sliding mode surface can be reformulated as


where the gains satisfy

Substituting the FOSM control law into (11), the time derivative of sliding variable gives

In consonance with (14), the time derivative of Lyapunov function can be expressible as
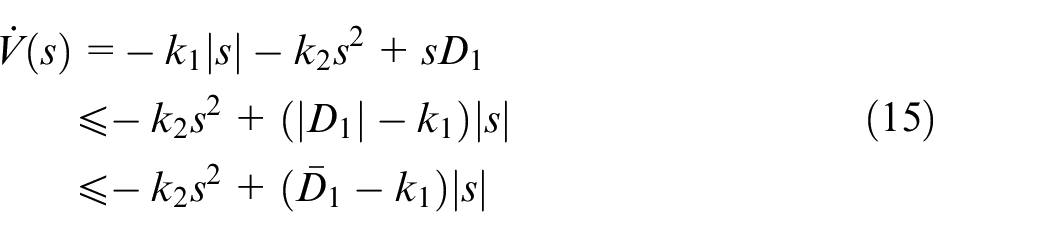
While the gains satisfy
(2) ASTSM controller design: SMC is famous for excellent robustness, but the general FOSM control is accompanied by serious chattering problem. As a result, requirements for reducing the chattering effect promote the development and innovation of HOSM control. On one hand, HOSM control can provide the same robustness as FOSM control. On the other hand, the chattering problem can be eliminated to some extent with the help of HOSM. Considering parameter adjustment problem, an adaptive higher order sliding mode control algorithm named ASTSM is displayed here.
Taking the derivative of (8) into account, define a new second order sliding mode surface as

where
The time derivative of the sliding mode surface can be written as

Noting that the condition
Substituting (18) into (17), the time derivative of the sliding mode surface can be rewritten as

where
It is assumed that the new sliding variable

where
By introducing the control law (20), the sliding mode variable (19) can be recast as 27

where
Conjoined with the new sliding mode surface, the Lyapunov function is modeled as

Adopting the transformation in (27), the new state vector is derived as

Taking the time derivative of (23) yields

where
By introducing the state vector (23), rewrite the Lyapunov function in quadratic form as

where
Associated with the new state vector (23), the time derivative can be presented as
where
Note that

Substituting (27) into the second term of (26) produces

where
Whatever the sign of

According to the above inequality, serious chattering is likely to happen because the constraints are uncertain and coefficients may be large. To make the requirement easy to meet, the boundary had better satisfy
It is tough to monitor

According to Ding et al.
15
and Chen et al.
23
it is reasonable to assume that
where the gains satisfy

where
Define a new variable as

After giving the construction of ASTSM control law, the internal state
Sorting of the formulation (34) gives
The estimation error is representable as

Taking the time derivative of estimation error (36) yields
By the agency of (37), the final expression of

Considering the estimation error, the Lyapunov function is chosen as

According to (38), the following result can be derived.
The above equation can be regarded as a quadratic equation of one variable with respect to

Hence,
Thus, the disturbance terms in the super-twisting sliding mode system are globally bounded by

Similar to (28), the time derivative must satisfy the following expression:

where
The matrix
According to the Lyapunov stability theory, the estimation error and sliding variable can converge to the origin in the finite time.
Lower controller
The required additional yaw moment
Here,
Next, the relationship between real torque of each wheel

By means of increasing/reducing the driving or braking torque, four wheels of EVs can be controlled independently working together with in-wheel motors.
State observer
In this part, a novel ISMO is introduced based on STA to estimate sideslip angle.
Assuming that the vehicle speed is fixed, the following equations can be obtained.

Substituting above equations into 2DOF vehicle dynamic state equation (3) produces
In addition, the lateral acceleration of vehicle is expressible as

As is discussed above, the real values of yaw rate and lateral acceleration can be derived by means of sensors but the sideslip angle can’t be measured directly due to high cost. In order to solve the problem, the formal structure of ISMO in the paper is designed as

where
Here,

There, the sliding manifold is chosen in the form of
It can be easily inferred that the derivate of the estimation error is expressed as


where
Similar to above steps, a new state vector is chosen as
Meanwhile, the Lyapunov function is designed as follows.

where
Taking time derivate of the new Lyapunov function turns out

where
Since
So far, the convergence of whole control system with state observer is proved.
Simulation results and discussions
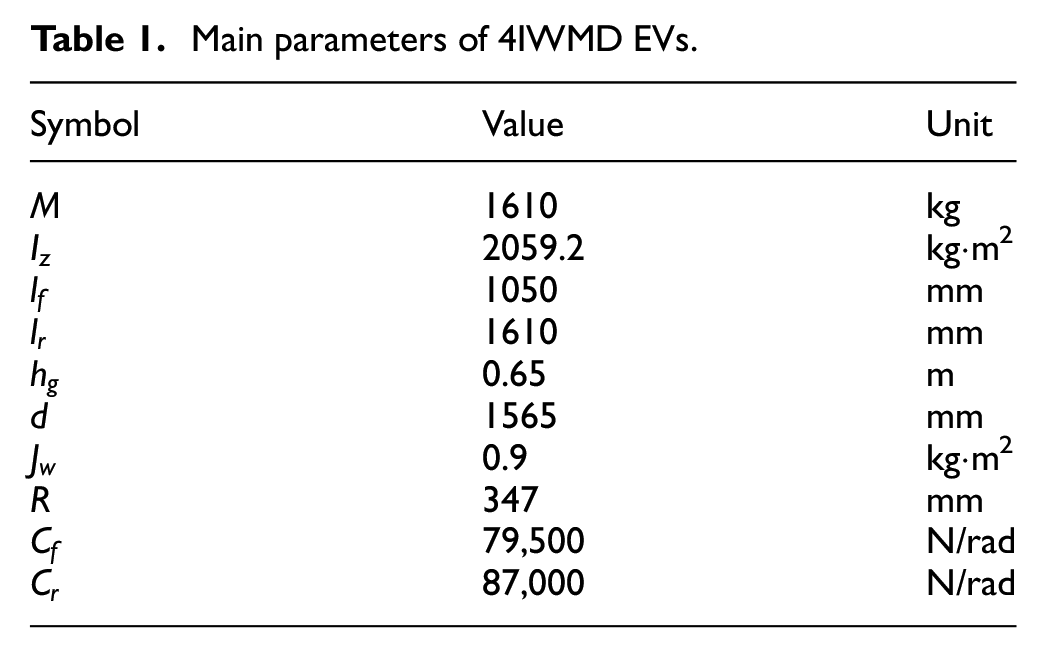
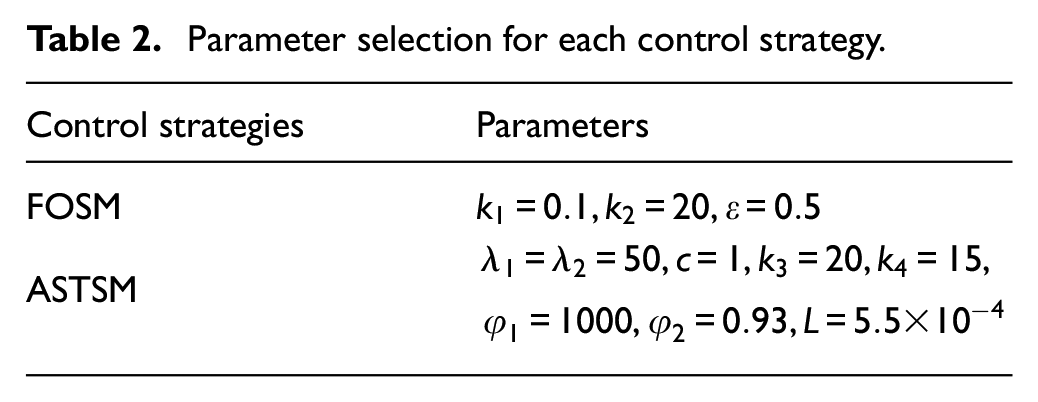
Till now, the design of DYC system and observer is completed. In order to verify the performance of proposed control strategy, co-simulation results of Carsim and Simulink are presented in this section. The main parameters of 4IWMD EVs are shown in Table 1. The gains of upper controllers are chosen by experience under the premise of Theorem 1 and 2, which are displayed in Table 2. In addition to FOSM and SOSM controllers mentioned in the paper, MPC method is well-established and widely used in this field. 21 Therefore, another upper controller based on MPC strategy is constructed for comparison.
Main parameters of 4IWMD EVs.
Parameter selection for each control strategy.
Sideslip angle estimation
For the purpose of proving the effectiveness of designed state observer, the simulation was carried out in the double line change conditions.
The parameters of state observer are chosen as follows:
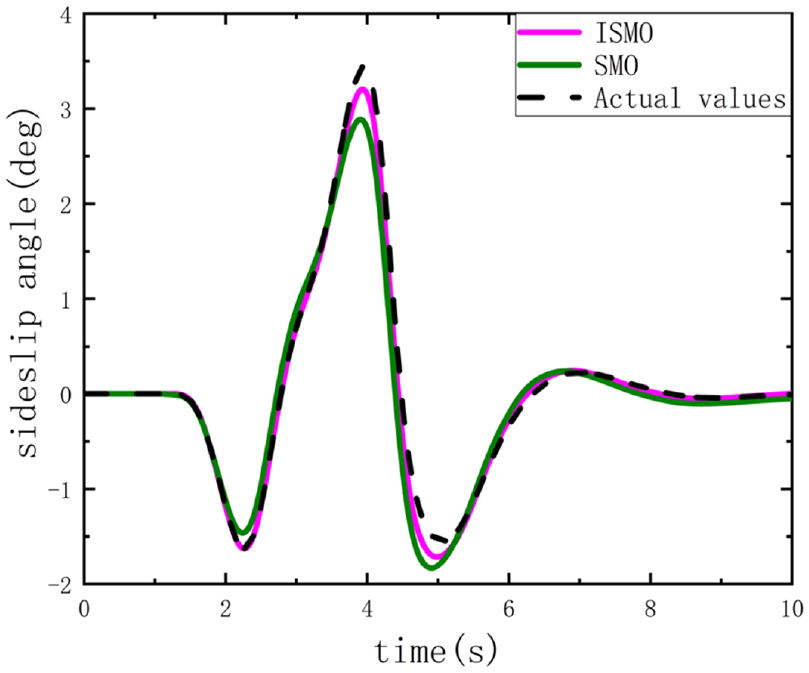
Estimation results on double lane change maneuver (speed = 120 km/h, road friction coefficient = 0.85).
For further validation, another condition was added by changing the speed and road friction coefficient. The initial speed of the vehicle is set as 85 km/h and the road friction coefficient is chosen as 0.3. The result is shown in Figure 5. As can be seen from the result, the estimation error of SMO increases sharply in low adhesion condition and the efficiency can’t meet the industrial requirements. The maximum error of proposed state observer is controlled at 0.3° and the accuracy is much better compared with SMO.
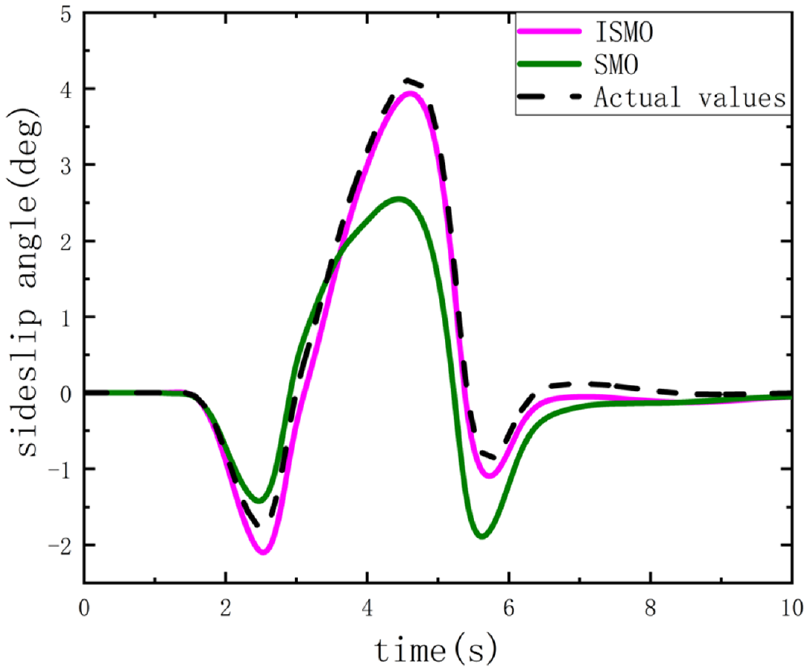
Estimation results on double lane change maneuver (speed = 85 km/h, road friction coefficient = 0.3).
Double lane change maneuver without disturbance
To compare efficiency of three controllers, the simulation of double lane change maneuver without disturbance was carried out at first. The initial speed of vehicle is set as 120 km/h and the road friction coefficient is chosen as 0.3 to simulate low adhesion road surface. The simulation results are listed as follows. Competition and tracking error of yaw rate under different controllers are plotted in Figure 6(a). Simultaneously, Figure 6(b) displays response curves of sideslip angle varying with time under three control methods. We can observe curves of yaw moment output varying with time in Figure 6(c). Specially, driving or braking torques of each wheel can be obtained from Figure 6(d).
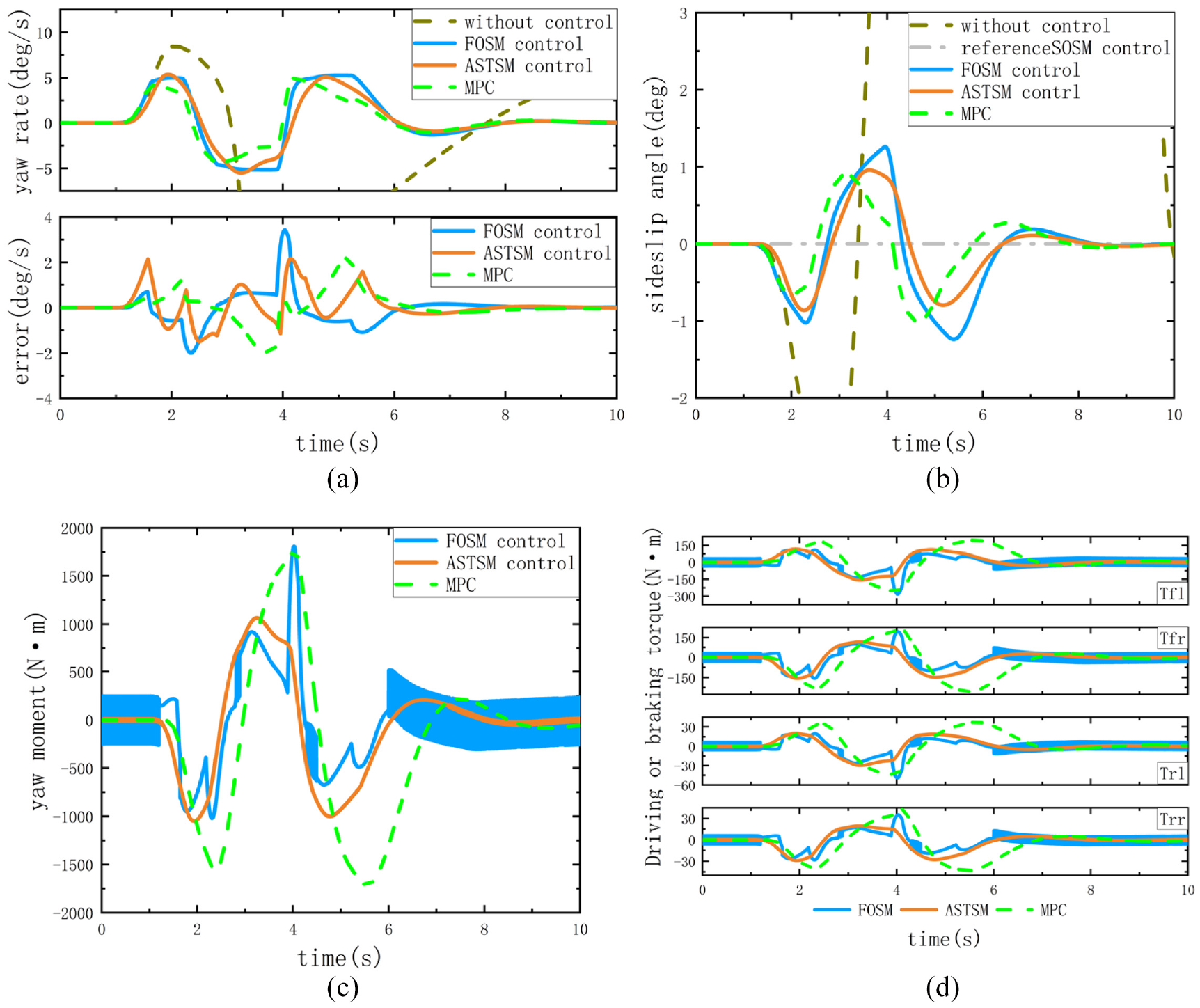
Simulation results on double lane change maneuver without disturbance: (a) competition of yaw rate, (b) competition of sideslip angle, (c) competition of yaw moment output, and (d) driving or braking torques of each wheel.
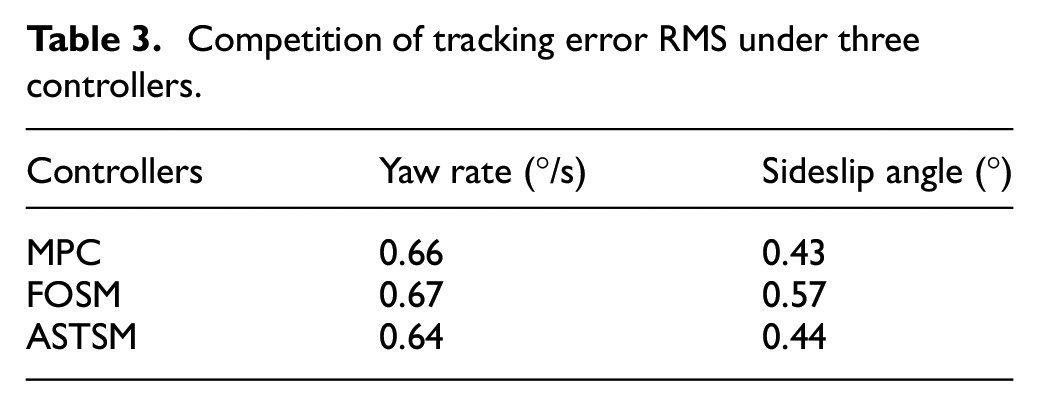
It can be seen that the vehicle without controller cannot run steadily on low adhesion road surface and three control methods are all effective from Figure 6(a) and (b). Both FOSM and ASTSM control can track the ideal values of yaw rate well, and so can MPC. On the other hand, ASTSM and MPC controllers perform better than FOSM in tracking ideal values of sideslip angle from Figure 6(b). Although FOSM controller can stabilize the sideslip angle within a certain range and shorten the variation range, the peak value exceeds 1° inevitably. Of course, the requirement can be satisfied by increasing the gains of FOSM controller. If so, the response curve will show severe chattering phenomenon, which obviously can’t be put into practical application. On the contrary, sideslip angle under ASTSM control can meet the requirement and controlled vehicle owns better lateral stability. What’s more, the root mean square (RMS) of tracking errors under different controllers is listed in Table 3, which can compare control performance numerically. It can be calculated using the following equation.

Competition of tracking error RMS under three controllers.
where
As is shown in the table, the results of tracking error RMS under ASTSM control is the best overall, which implies the ASTSM control has better performance than others.
Yaw moment outputs calculated based on proposed control methods are given in Figure 6(c) and driving or braking torques of each wheel are shown in Figure 6(d). In comparison, the yaw moment output of MPC is larger than other controllers overall, which means the actuators need to generate larger forces under MPC. We can find that yaw moment output under FOSM control have much more serious chattering problem, which will do harm to actuators. In comparison, the ASTSM controller stabilizes the upper control output significantly, almost no chattering phenomenon. Meanwhile, maximum values of torques distributed to four wheels with FOSM controller are larger and their response curves exist severe chattering.
Double lane change maneuver with side wind disturbance
To further verify the influence of external disturbance on proposed control strategies, double lane change maneuver with side wind disturbance was carried out and Figure 7 gives the time history of side wind. Results are shown as follows. After considering the influence of side wind, competition and tracking error of yaw rate under different control strategies turns into curves in Figure 8(a). Furthermore, Figure 8(b) give the response curves of sideslip angle. The time history of yaw moments is presented in Figure 8(c) and driving or braking torques of each wheel are plotted in Figure 8(d).
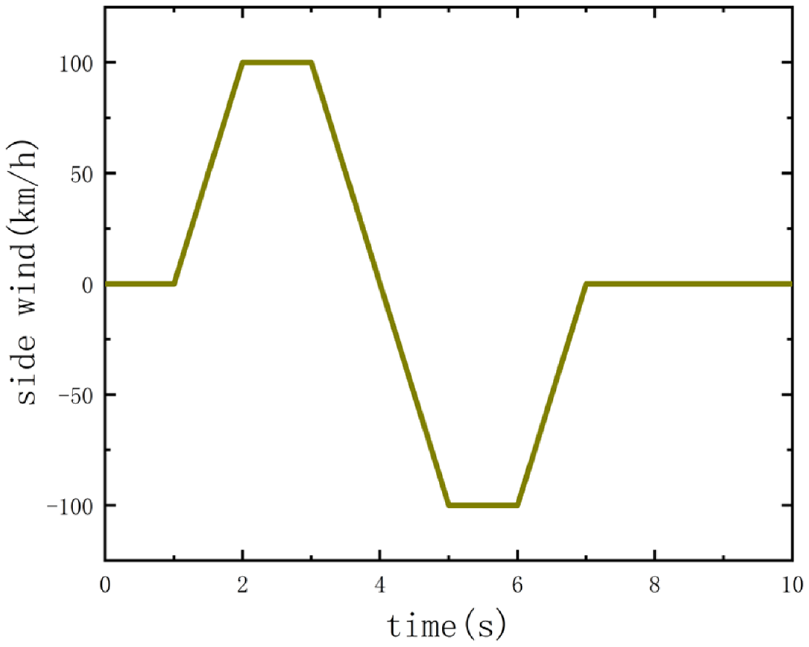
The response curve of side wind.
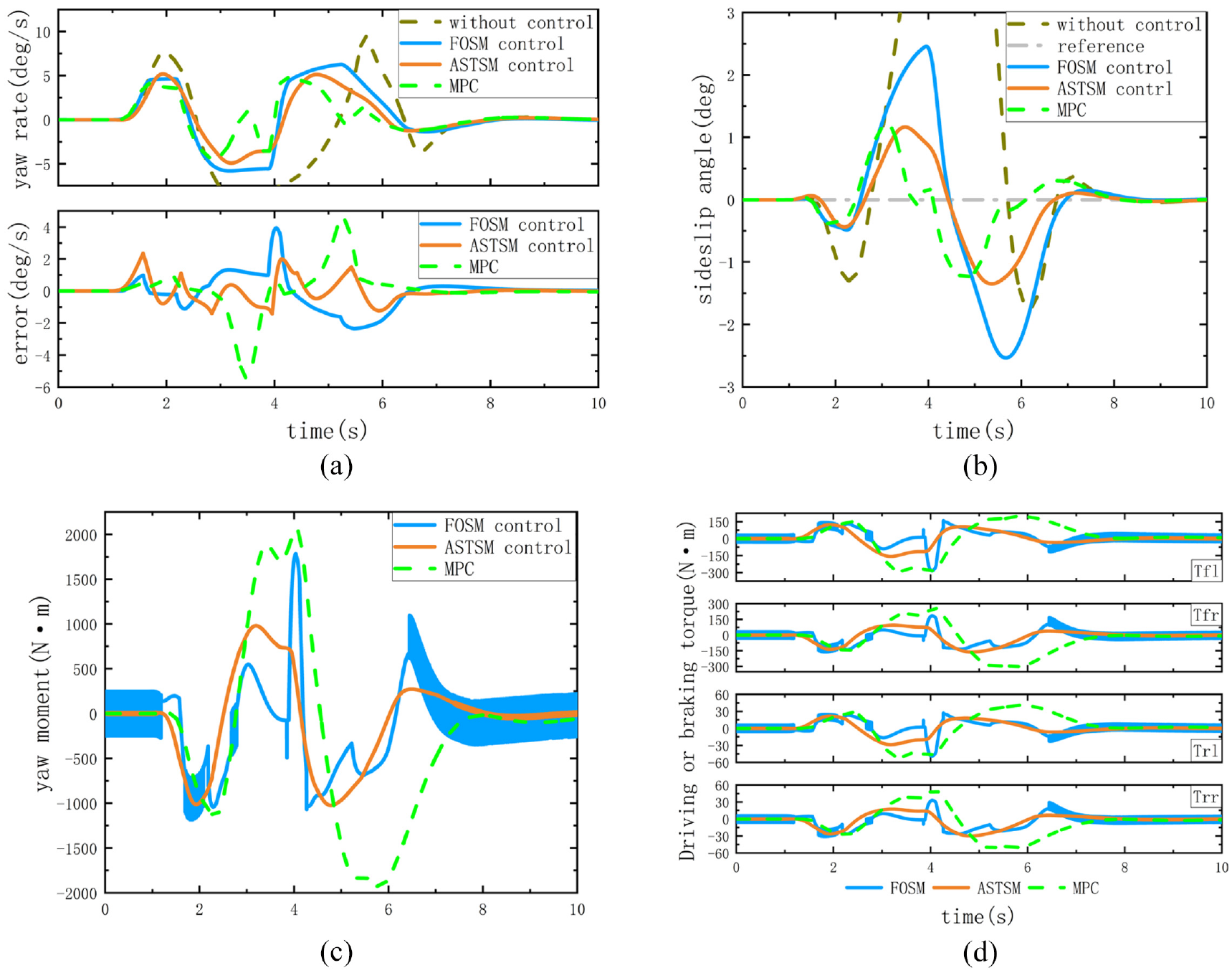
Simulation results on double lane change maneuver with side wind disturbance: (a) competition of yaw rate, (b) competition of sideslip angle, (c) competition of yaw moment output, and (d) driving or braking torques of each wheel.
It is clear that the vehicle without control performs worse on low adhesion road with side wind. From Figure 8(a), the tracking performance of yaw rate under MPC and FOSM controllers becomes worse obviously while there nearly exists no difference under ASTSM controller. In Figure 8(b), the curve of sideslip angle under ASTSM control performs much better than that under FOSM control. As to MPC, it is obviously that the response curve of sideslip angle in Figure 6(b) is much smoother. The RMS of the tracking errors with different controllers can be found in Table 4. It can be seen that the RMS of yaw rate tracking error under MPC increases from 0.66 to 1.35°/s, and there is no huge increase in that of sideslip angle tracking error. The RMS of yaw rate and sideslip angle tracking errors under FOSM control increase significantly because the condition
Competition of tracking error RMS under three controllers.
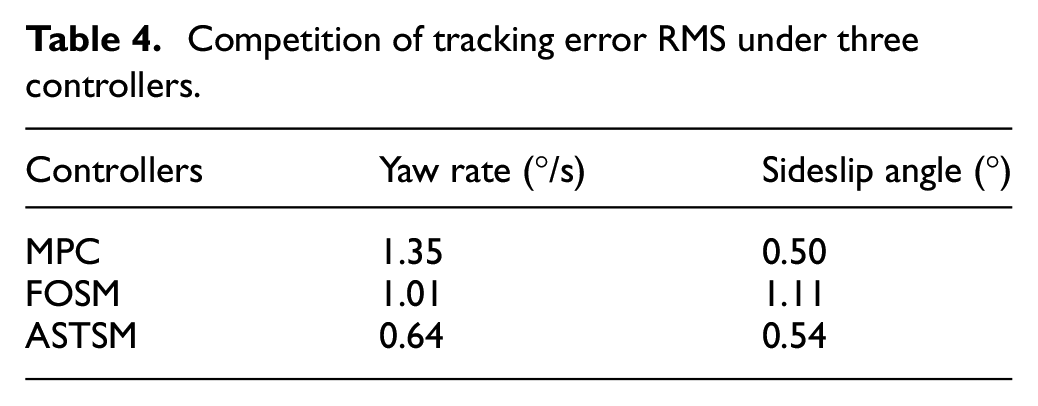
Figure 8(c) and (d) plot yaw moment outputs and driving or braking torques of each wheel, respectively. By using FOSM controller, the severer chattering occurs in the output response curves due to external disturbance. It can be concluded from two figures that the chattering problem can be solved significantly by using ASTSM control strategy even if external lumped disturbance exists, which verifies the effectiveness and robustness of composite controller. Meanwhile, the peak values of yaw moment output and each distributed torque under MPC becomes larger, which would increase actuator burden.
In conclusion, proposed ASTSM control method can tackle chattering problem to a large extent and perform better even if the external disturbance exists. The simulation results can epitomize the effectiveness of proposed control method.
Conclusion
In this paper, a composite DYC strategy based on STA is proposed to improve handling and stability of 4IWMD EVs. To deal with the chattering existing in conventional sliding mode control, the upper controller is constructed based on a second-order sliding mode control algorithm named ASTSM control, which can reduce gains in sliding mode controllers and weaken the influence of external disturbance whatever the disturbance is bounded by. In consideration of expensive cost in actual practice, an ISMO is proposed based on STA, which can estimate sideslip angle effectively. From simulation results, we can conclude that the vehicle can achieve excellent performance in the presence of external disturbance and the chattering shortage is overcome by dint of ASTSM control strategy with ISMO. The proposed DYC strategy eliminates chattering perfectly and proves to be effective and robust.
Footnotes
Declaration of conflict of interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Engineering Laboratory of High Mobility anti-riot vehicle technology (grant number B20210017), the Innovation Fund Project of China Aerospace 1st Academy (grant number HTF20200960), and the National Natural Science Foundation of China (grant number 11672127).