
Abstract
Coordination of Active Front Steering (AFS) and Direct Yaw Moment Control (DYC) has been widely used for non-autonomous vehicle lateral stability control. Recently, some researchers used it (AFS/DYC) for path-following of autonomous vehicles. However, current controllers are not robust enough with respect to uncertainties and different road conditions to guarantee lateral stability of Autonomous Four In-wheel Motor Drive Electric Vehicles. Thus, a coordinated control is proposed to address this issue. In this paper, a two-layer hierarchical control strategy is utilized. In the upper-layer, a self-tunable super-twisting sliding mode control is utilized to deal with parametric uncertainties, and a Model Predictive Control (MPC) is used in order to allocate the control action to each AFS and DYC. Parametric uncertainties of tires’ cornering stiffness, vehicle mass and moment of inertia are considered. Simulations with different road conditions for path-following scenario have been conducted in MATLAB/Simulink. An autonomous vehicle equipped with Four In-wheel Motor and two degrees of freedom vehicle dynamics model is used in this study. In the end, the performance of the proposed controller is compared with the MPC controller. Simulation results reveal that the proposed controller provides better path-following in comparison with the MPC controller.
Keywords
Introduction
Autonomous Ground Vehicles (AGVs) have become an emerging and promising mode of transportation in recent years. According to the National Highway Traffic Safety Administration (NHTSA), AGVs have the potential to remove driver-related errors which contribute to 94% of serious crashes. 1 Billions of dollars economic loss due to vehicle crashes can be saved by AGVs. 2 Also, AGVs can bring smoother traffic flow and mitigate traffic congestion. 3 There will likely be more benefits of Autonomous Electric Vehicles such as reducing energy consumption and greenhouse gas emissions. 4 Meanwhile, improvement and development in the field of in-wheel motors have made this technology more feasible to utilize it in EVs. 5 Four In-wheel Motor Drive Electric Vehicles (4IDEVs) are likely to provide higher energy efficiency, flexibility in control, high transmission efficiency and better manoeuvrability. 6 As a result, recently, Autonomous Four In-wheel Motor Drive Electric Vehicles (AFIDEVs) have become a focus in many studies. Accurate path-following is one of the most critical control problems for AGVs. The controller needs to follow the desired path smoothly and with the least error to guarantee the safety of vehicles even in extreme conditions. 7 One of the factors which have the most impact in the path-following performance of autonomous vehicles is vehicle lateral stability. Some of the most well-known control methods for vehicle lateral stability control are Direct Yaw moment Control (DYC), 8 Active Front wheel Steering control (AFS), 9 Active Rear wheel Steering control (ARS) 10 and four wheel Steering control (4WS). 11 Among the aforementioned methods, coordination of Active Front Steering (AFS) and Direct Yaw Moment Control (DYC) has been widely used for non-autonomous vehicles in the recent decade.12–22
Recently, some researchers have started to utilize AFS and DYC for the path-following of AFIDEVs. 23 Feedback control and optimal control theory have been used for the coordination of AFS and DYC in these studies. In Ref. 6, a modified composite nonlinear feedback strategy was proposed while considering different driving conditions. Ref. 24 presented an integrated control of the AFS and DYC using integral sliding mode (ISM)-based composite nonlinear feedback (CNF) control technique while considering uncertainties of tires’ cornering stiffness and different driving conditions. In Ref. 25, a combination of lane keeping control and DYC was introduced while considering uncertainties of tires’ cornering stiffness and different driving conditions. In Ref. 26, a novel adaptive hierarchical control framework utilizing an adaptive fuzzy linear matrix inequality-based sliding mode control and pseudo-inverse control allocation was proposed while considering 20% uncertainties of tires’ cornering stiffness and different driving conditions. In Ref. 27, an adaptive robust LQR controller was proposed to achieve optimal AFS/DYC control inputs while considering uncertainties of tires’ cornering stiffness and different driving conditions.
As compared to the forenamed feedback controls and optimal control theory described in the previous paragraph, the Model Predictive Control (MPC) enables the controller to takes into account the physical constraints of actuators, which makes it more popular to use in AGVs with in-wheel motors. 28 Therefore, an integration of simplified motion-planning program and a Model Predictive Control (MPC) was proposed, which uses the front steering and individual wheel torques to track the planned trajectories. 29 In Ref. 30, an integrated model predictive and torque vectoring control based on nonlinear-MPC and Sliding Mode Control (SMC) was introduced while considering different driving conditions. In Ref. 31, an integrated active steering control (ASC) and DYC was proposed, which utilized MPC and a constrained weighted least square (CWLS)-based torque distributor while considering different driving conditions. In Ref. 32, a coordinated path-following system (PFS) and DYC using MPC and pseudo-inverse (PI) control were proposed while considering time-varying longitudinal velocity. In Ref. 33, a hierarchical path tracking coordinated control with DYC is proposed, of which the upper controller uses the MPC based on the dynamic adjustment of control target weight coefficient by variance adjustment factor to calculate the traction force, front wheel steering angle and yaw moment required by the vehicle in the double lane change manoeuvres.
Nevertheless, MPC can still be improved further. It is known that MPC is a model-based controller and highly depends on the accuracy of the dynamic model. Thus, in the presence of various parametric uncertainties and different road conditions, MPC’s path-following performance will decrease. 30 In the aforementioned studies, researchers have considered uncertainties of tires’ cornering stiffness and different road conditions. However, there are other uncertainties such as the uncertainty of vehicle mass and the moment of inertia that can also have a considerable effect on the MPC’s performance. It is of great importance to take them into account when designing the controller.
This paper investigates a coordinated control based on a hierarchical structure for path-following of an AFIDEV, which guarantees vehicle lateral stability and manoeuvrability in the presence of 20% uncertainties of tires’ cornering stiffness, vehicle mass, moment of inertia and different road conditions. In the upper-layer, a self-tunable super-twisting sliding mode control (ST-SMC) and a Model Predictive Control (MPC) operate simultaneously. In the lower-layer, an existing control allocation method is used to distribute total torques among four wheels.
The rest of the paper is organized as follows: Section II presents a path-planning in which a double lane change manoeuvre is designed to test the path-following performance of controllers. Then, a two degree of freedom vehicle dynamics model is presented in Section III, which will be used in designing the controller. Section IV introduces the proposed coordinated control, which consists of an upper-layer and a lower-layer. Then, simulation results are discussed in section V. Finally, a concluding remarks will be explained in section VI.
Path-planning
In the AGVs, the path-following controller needs to have a path as a reference to track it. Therefore, a reliable path is paramount for AGVs safety and occupant comfort. A proper path-planning which considers vehicle dynamics limitations will reduce the path-following controller effort and increase the controller’s performance. The path-planning is done by the decision-making controller in AGVs. The decision-making controller constantly communicates with the vehicle’s surrounding environment via different sensors such as LIDAR, GPS, RADAR and camera to identify lanes, pedestrians, obstacles and other cars around the vehicle.34–39 After processing data, according to vehicle current condition, the decision-making controller generates the desired path to meet the AGV’s mission.
In this study, for evaluating the proposed controller path-following performance, a Double Lane Change (DLC) manoeuvre is designed as the desired path, which is shown in Figure 1. The desired path must be capable of providing reference inputs for lateral stability control (yaw rate and yaw acceleration). Thus, a five-degree polynomial function (Quintic) has been utilized for the DLC manoeuvre.
40
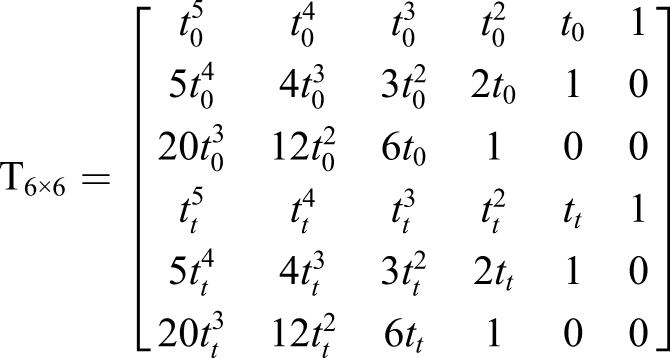
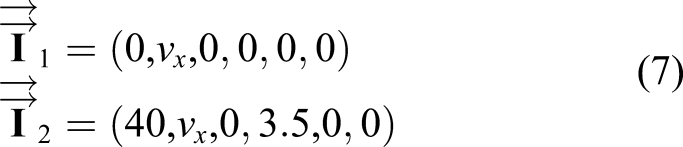
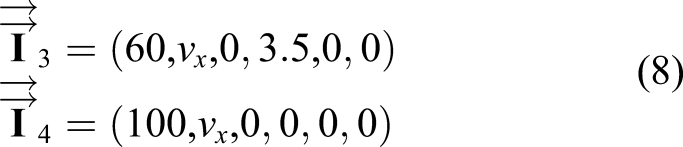
First, a single lane change is designed, then it will be extended for the second lane change, which makes a DLC in total. In this paper, we adopt the notation that an upper-case bold-face non-italic variable is a vector, a lower-case not-bold variable is a scalar and an upper-case non–bold-faced non-italic is a matrix. Double lane change (DLC) manoeuvre.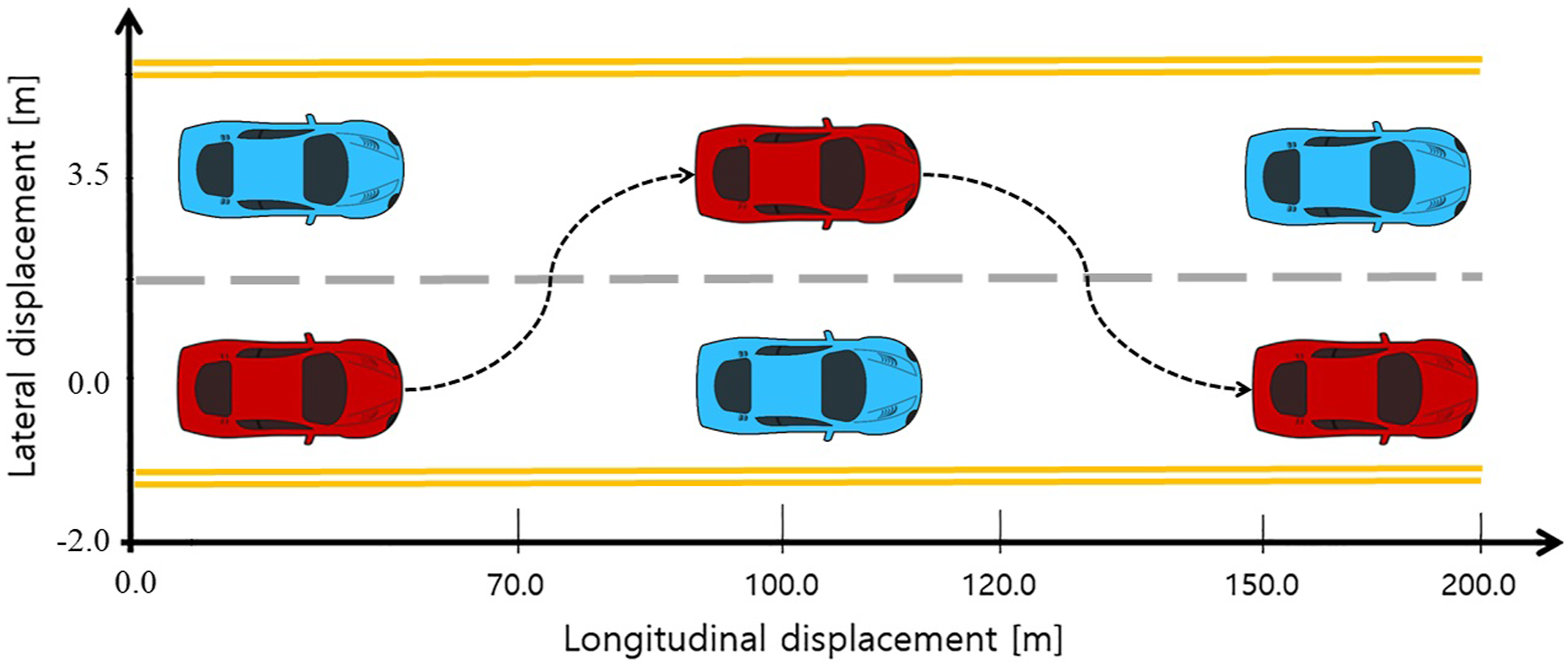
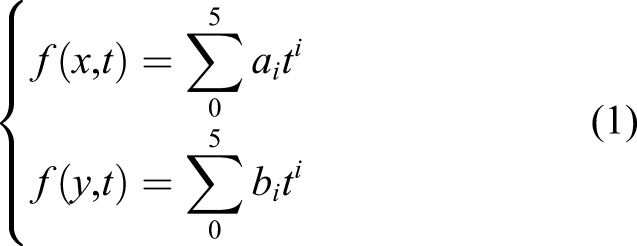
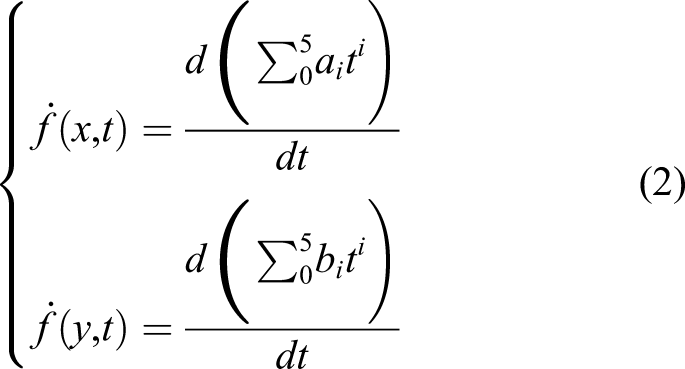
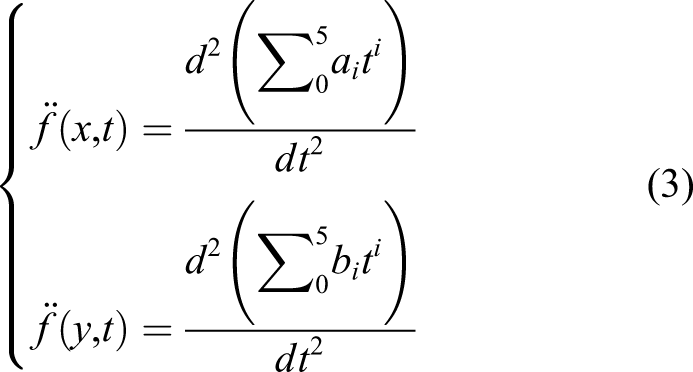
For designing a single lane change path, the following five-degree polynomial function is considered to generate the position of the vehicle in the path.






Vehicle dynamics model
It is known that for designing a controller, a dynamic model is needed. As mentioned before, vehicle lateral dynamics have the most effect on the path-following performance. Thus, in this study, a simplified and commonly used two degrees of freedom (2-DOF) bicycle dynamic model of AFIDEV is utilized which only considers lateral and yaw motions and assumes constant longitudinal velocity. Vehicle’s 2-DOF bicycle model can be found in Figure 2. According to the literature, considering 2-DOF bicycle model and tire linear model are high-fidelity enough to design a vehicle control system based on it.44,14 Vehicle 2-DOF bicycle model.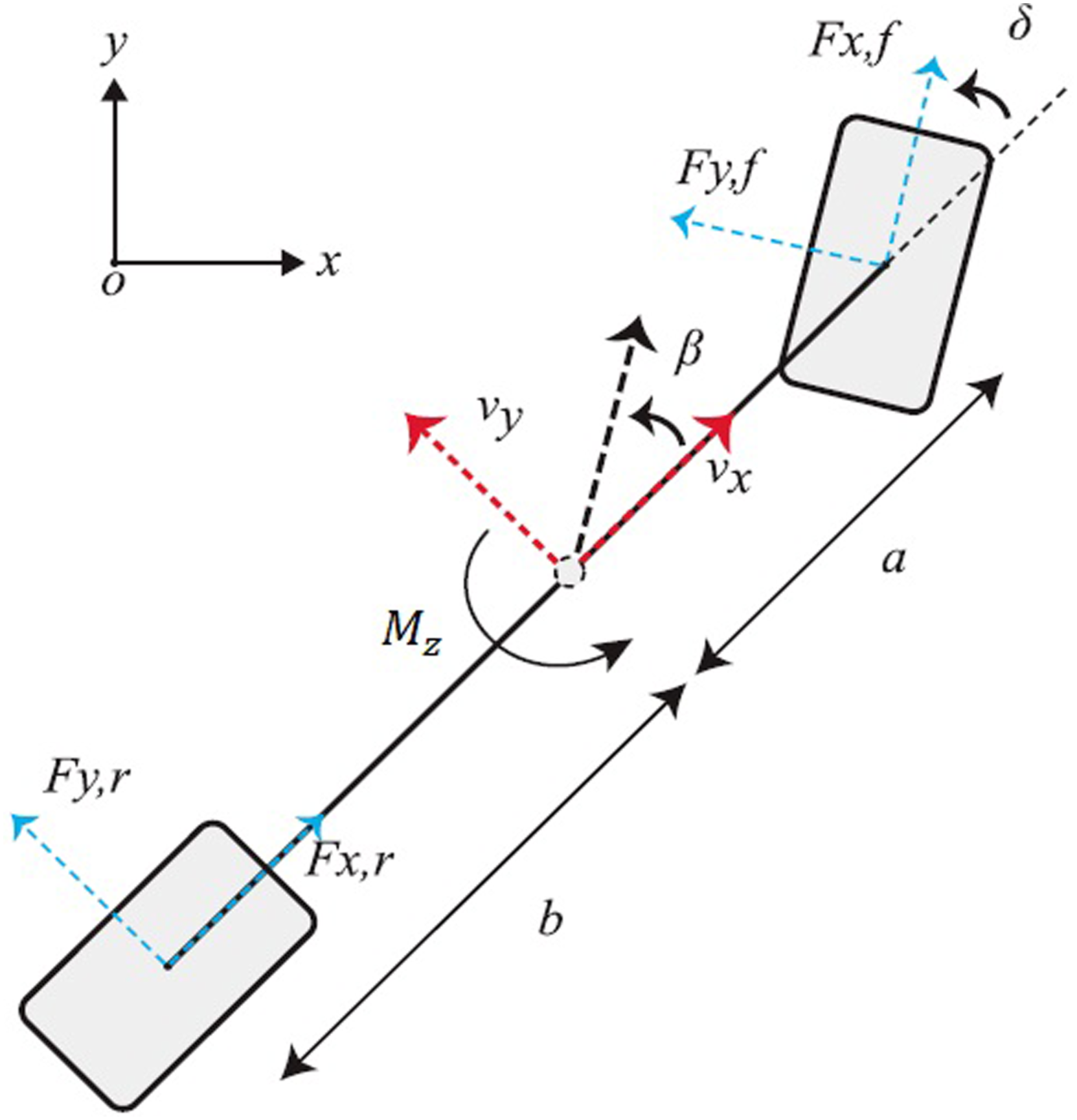
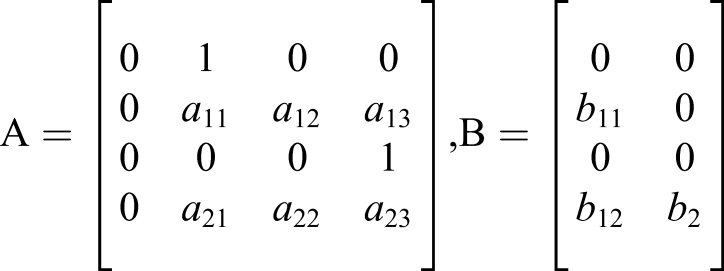
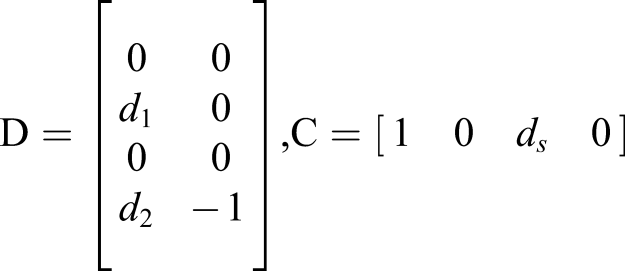
Also, due to the complexity and nonlinearity of the vehicle dynamics model, a linearized model is considered to minimize the controller’s effort. Thus, the vehicle dynamics model equation utilized in this study is considered as follows. 42
The lateral motion






By substituting equations (10) and (11) in equations (12) and (13), the following equations can be concluded.




Controller design
As explained in the introduction, Model Predictive Control (MPC) has been recently used for path-following of AFIDEVs. However, in the presence of various uncertainties, the performance of MPC would be degraded. Thus, in this study, a coordinated control for path-following of an AFIDEV is proposed, which considers uncertainties of tires cornering stiffness, vehicle mass, moment of inertia and different road conditions. The proposed coordinated control is based on a two-layer hierarchical structure. 45 In the upper-layer controller, we introduce a self-tunable super-twisting sliding mode control (ST-SMC) integrated with MPC to improve its robustness with respect to uncertainties for AFIDEVs.
According to Ref. 46, chattering phenomena can be classified into three types. The first type is harmless and inexorable. The second and third types of chattering which are harmful for system are proved in Ref. 46 to be removable by proper use of second-order sliding modes (SOSM) which is considered in this study. 23 In electric vehicles, fast stable actuators and sensors only generate the first type of chattering in SOSM systems.
Figure 3 demonstrates the proposed strategy using a block diagram. Path-planning provides control reference inputs for the error calculator, which also receives the system’s output. Then, the calculated error is fed back to the upper-layer controller to generate a steering wheel angle and external yaw moment for the vehicle dynamic. In the lower-layer controller, the external yaw moment is distributed among four wheels independently. Control block diagram.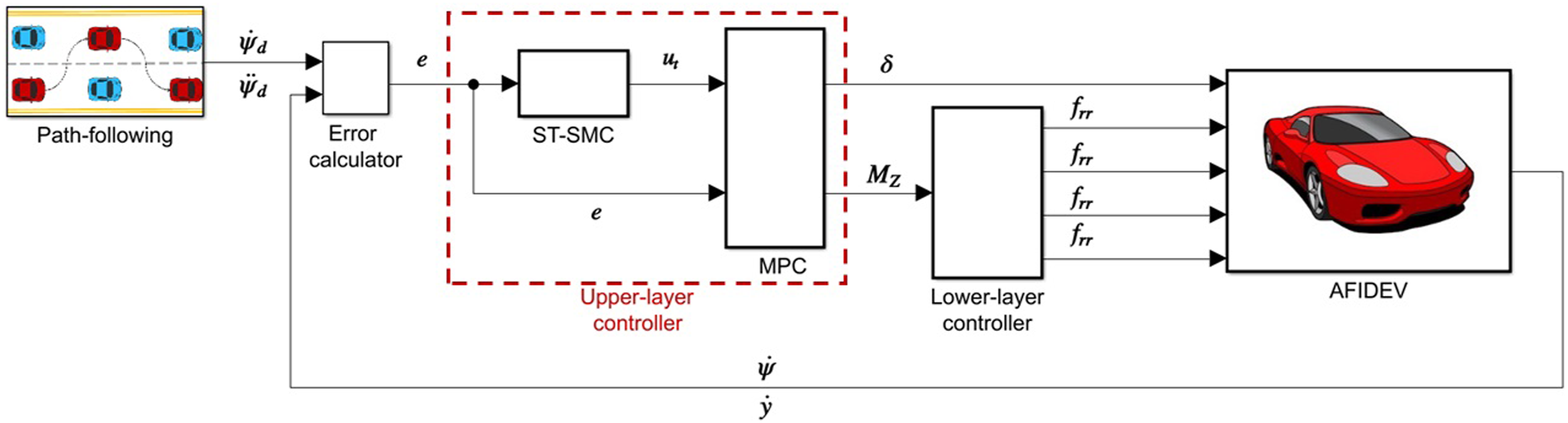
Upper-layer controller: ST-SMC
In this study, a self-tunable ST-SMC is introduced, which is responsible for dealing with parametric uncertainties and different driving conditions. Unlike traditional SMC methods, ST-SMC reduces the chattering problem, and it is also shown to be more robust against uncertain parameters.47,23 In order to use STA, the relative degree of sliding variable to control input needs to be one. Therefore, the sliding surface is defined as follows



Due to this fact that the system is two input single output (TISO), the following equation is introduced which make the system capable of using sliding mode control.





By applying the parameters of equation (28) into equation (27), the total control input is obtained as follows

Upper-layer controller: MPC
In this section, a Model Predictive Control (MPC) is utilized as the main path-following controller. MPC calculates control actions at each control interval using a combination of model-based prediction and constrained optimization during the predicted horizon.
51
In MPC, equality and inequality constraints can be considered. In this study, we use the active solver for our MPC. In order to simplify the controller design and implementation, the continuous state-space equation (18) is converted into a discrete-time system as follows

In this study, the following cost function and constraints are proposed.


Lower-layer controller
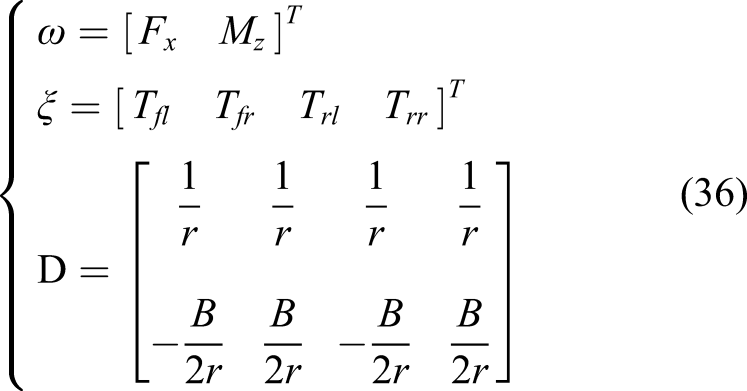
In this section, an existing method for torque distribution has been provided to complete the hierarchical structure of the controller. This method is widely used for control allocation in 4IDEVs.53,11 Considering that the front wheel steering angle is very small, the effect of steering wheel angle on longitudinal force and external yaw moment can be ignored.
Figure 4 demonstrates 2 DOF dynamic model of the vehicle. It reveals the detailed interaction between the total longitudinal force, each tire’s longitudinal force and external yaw moment. Their relationship can be expressed as following equations 2-DOF dynamic model of the vehicle for lower-layer controller.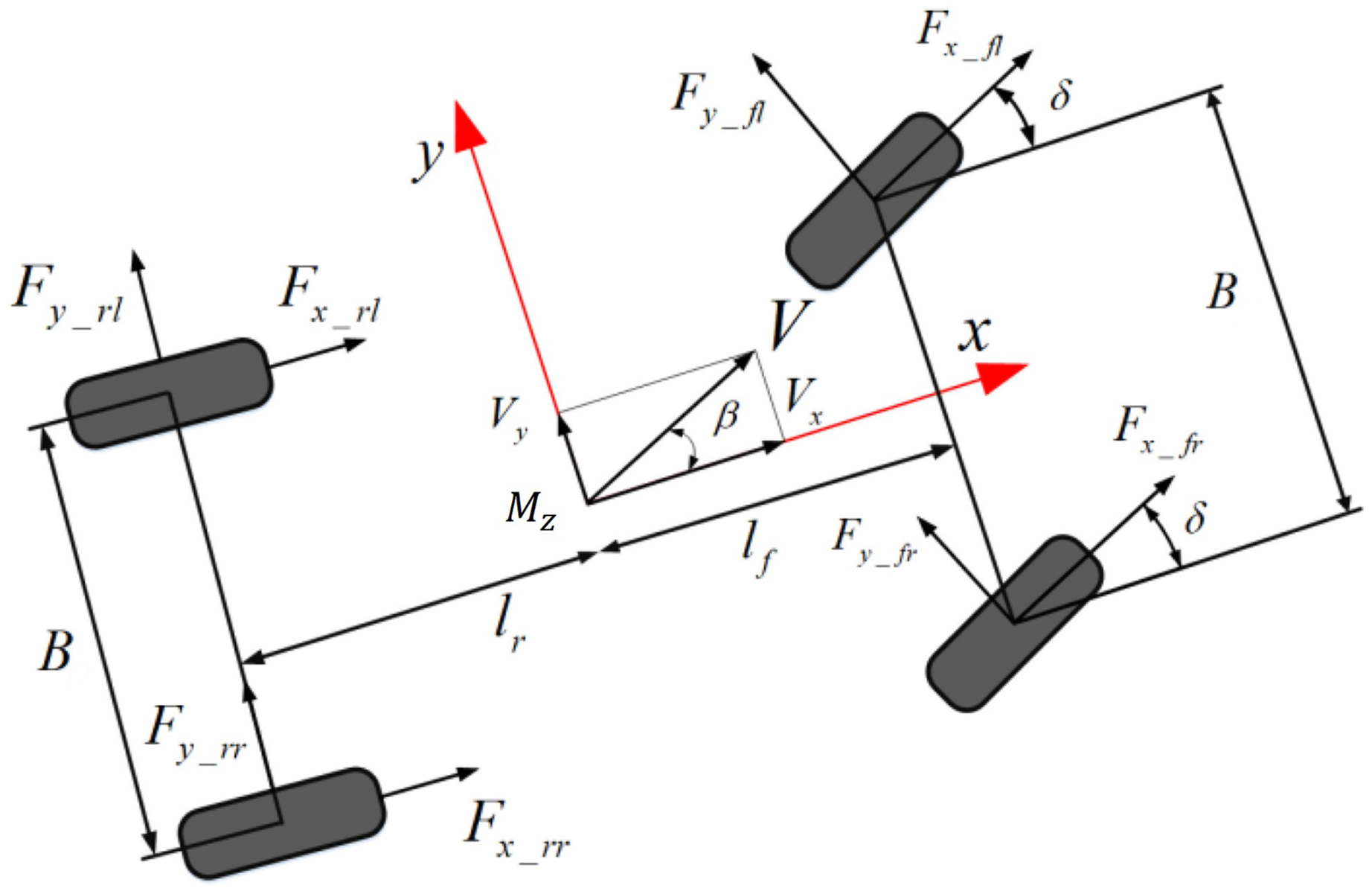




The sequential least squares problem can be written in the form of the weighted least squares problem by proposing the weighting coefficient ɛ as follows
54

which can be also written as follows



Simulation results and discussions
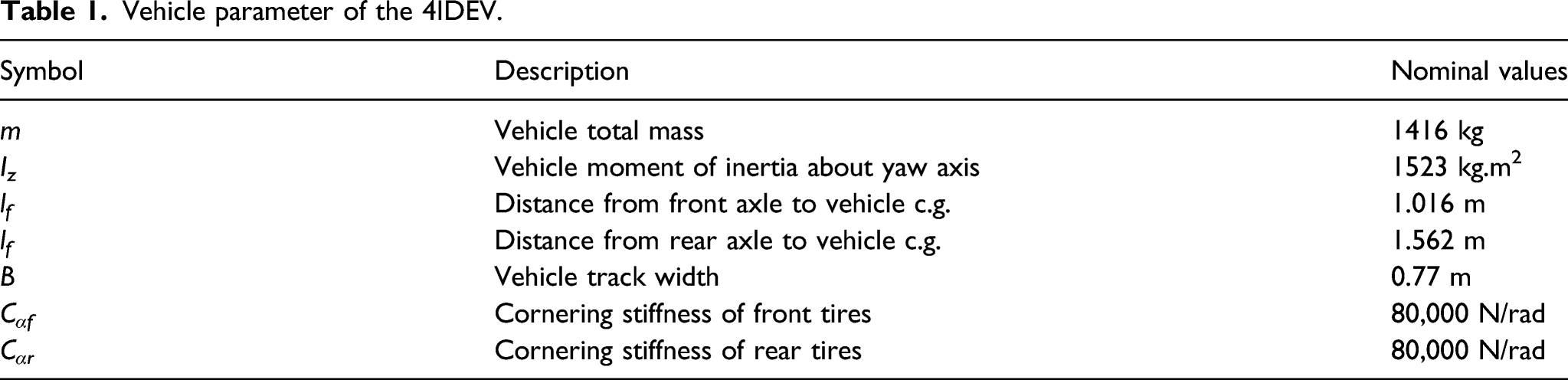
In this section, the performance of the proposed coordinated control of AFIDEV in a Path-Following scenario is evaluated in different conditions using MATLAB/Simulink. 2-DOF vehicle bicycle model is used for simulations. 44
Vehicle parameter of the 4IDEV.
In the simulation results presented in Figure 5, μ = 0.3 (icy road) and a longitudinal velocity of v
x
= 20 m/s is considered. According to Figure 5(a), it can be realized that the proposed controller can accurately track its desired path and has a better path-following performance than the MPC. The path-following performance can also be investigated by lateral error (e) in the Figure 5(d), which reveals a difference between the proposed controller and MPC errors. The performance of both controllers in using AFS (Figure 5(f)) is close. However, the important difference can be figured out from external yaw moment (M
z
) in the Figure 5(c), which in the proposed controller, DYC is more sensitive to environmental changes as compared to the MPC. Simulation results with μ = 0.3 (icy road), v
x
= 20 m/s and 20% uncertainties of front and rear tires cornering stiffness, vehicle mass, moment of inertia in a double lane change (DLC) manoeuvre. (a) vehicle’s path. (b) external yaw moment. (c) sliding surface. (d) lateral error. (e) e1 and e2. (f) steering wheel angle.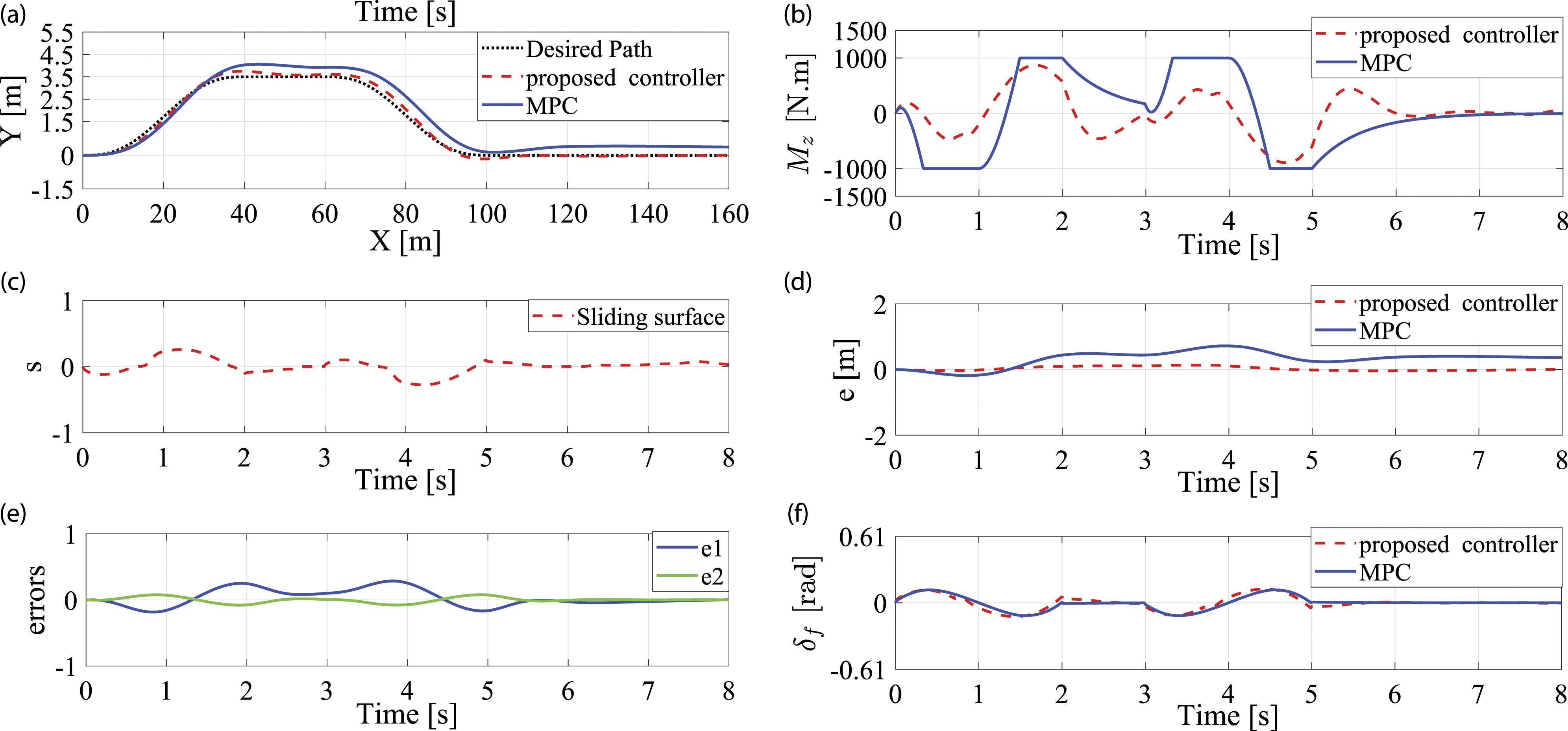
Another simulation result is presented in Figure 6. In this simulation, μ = 0.3 (icy road) and the longitudinal velocity of v
x
= 25 m/s are also considered. Low adhesion road and high speed result in a difficult situation for the controller. According to Figure 6(a), in this case, the proposed controller again has a better path-following performance than the MPC; also, the lateral error difference between the proposed controller and MPC has been increased, and it has become more significant in Figure 6(d). The proposed controller uses AFS more than MPC based on Figure 6(f). Furthermore, considering the changes of external yaw moment in Figure 6(b), the proposed controller shows to be more sensitive to the changes of environmental conditions as well as the uncertainties. This higher sensitivity results in a quicker response of the DYC which eventually results in a better path-following performance. Simulation results with μ = 0.3 (icy road), v
x
= 25 m/s and 20% uncertainties of front and rear tires cornering stiffness, vehicle mass, moment of inertia in a double lane change (DLC) manoeuvre. (a) vehicle’s path. (b) external yaw moment. (c) sliding surface. (d) lateral error. (e) e1 and e2. (f) steering wheel angle.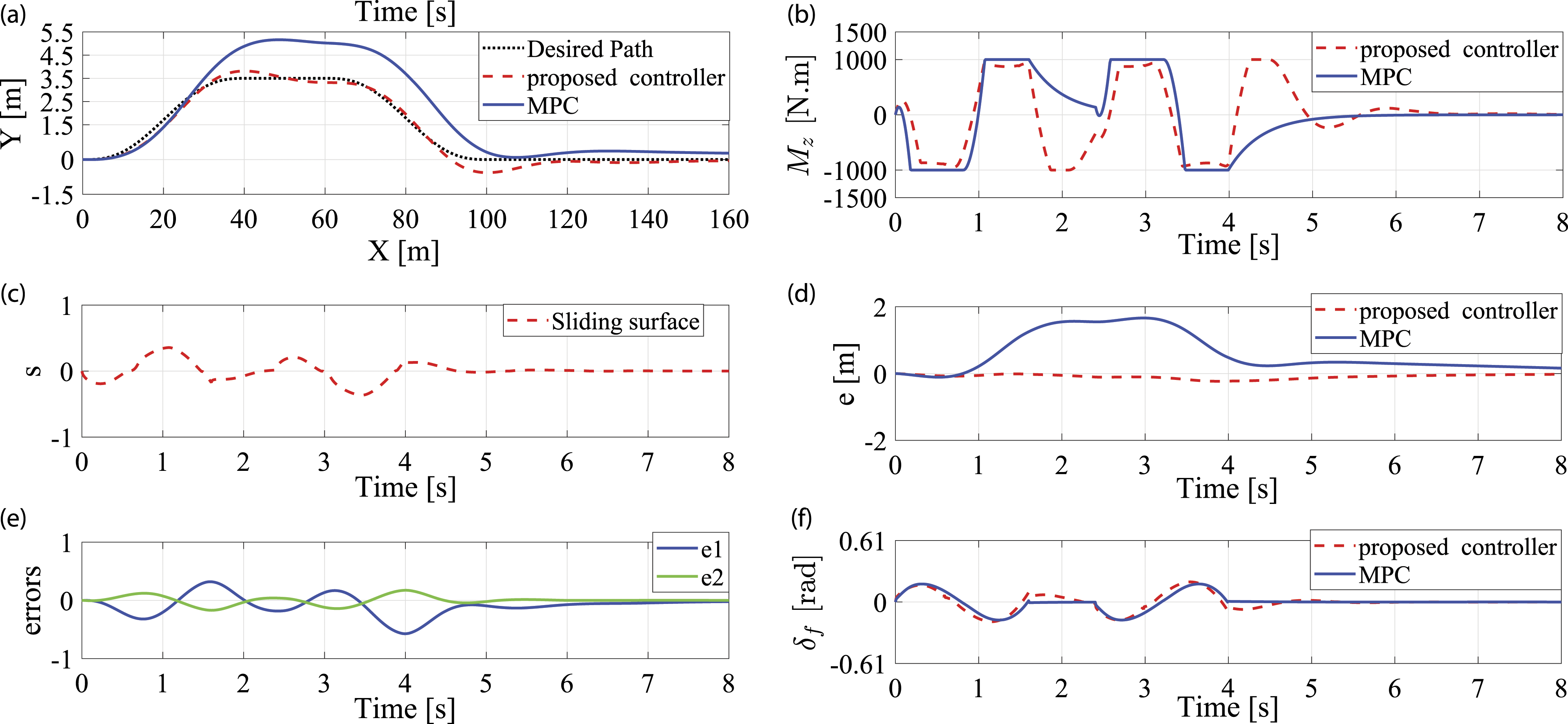
The simulation result is presented in Figure 7 considering μ = 0.5 (wet road) and longitudinal velocity v
x
= 20 m/s. According to Figure 7(a), it can be seen that the proposed controller accurately tracks the desired path and has a better path-following performance than MPC. The path-following performance can also be investigated by lateral error (e) in the Figure 7(d), which reveals a significant difference between the proposed controller and MPC errors. Both controllers’ performance in using AFS (Figure 7(f)) is close. However, a significant difference can be observed from the external yaw moment M
z
in Figure 7(b) which demonstrates a delay in utilizing DYC in the MPC, and that is the reason of the high error in MPC. Simulation results with μ = 0.5 (wet road), v
x
= 20 m/s and 20% uncertainties of front and rear tires cornering stiffness, vehicle mass, moment of inertia in a double lane change (DLC) manoeuvre. (a) vehicle’s path. (b) external yaw moment. (c) sliding surface. (d) lateral error. (e) e1 and e2 (f) steering wheel angle.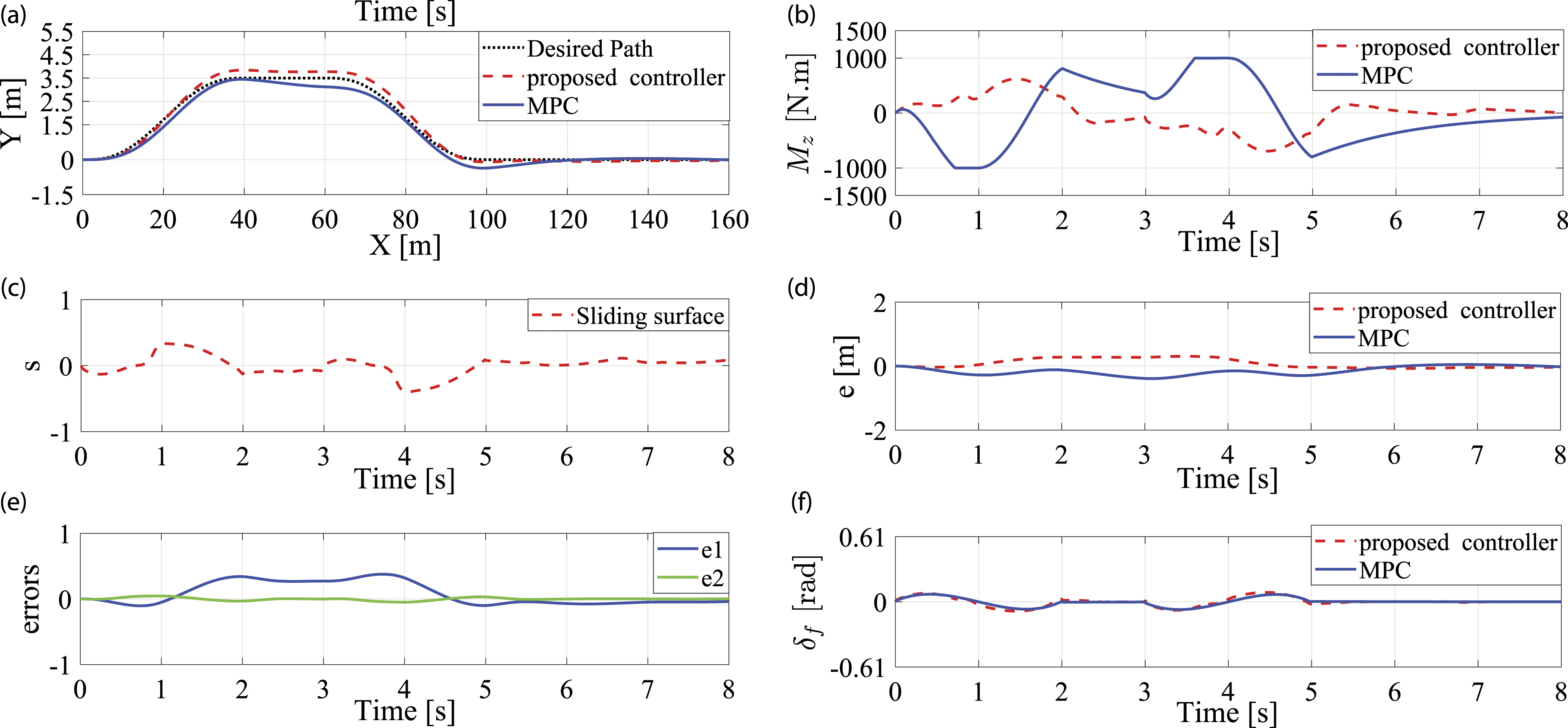
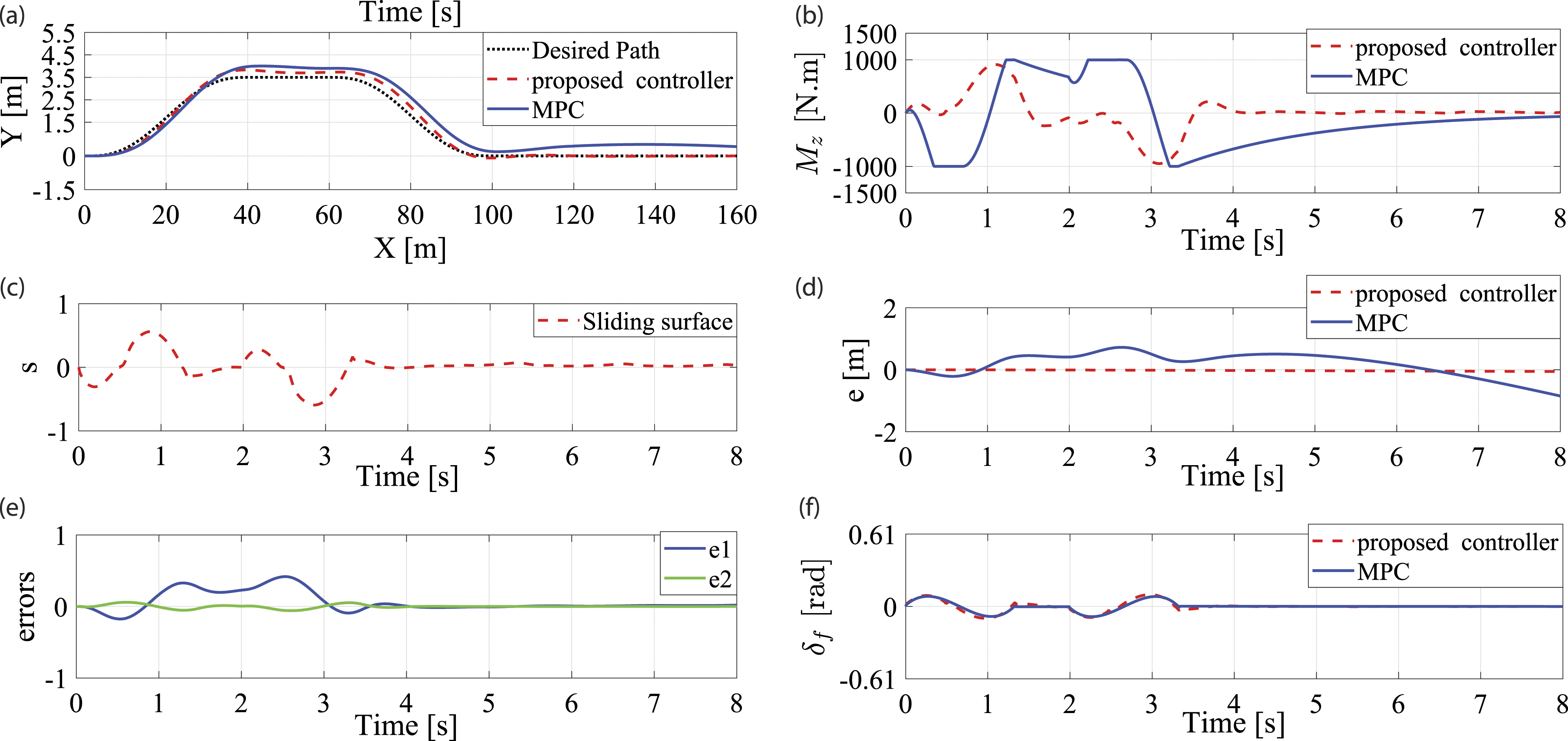
Simulation result presented in Figure 8 shows controller performance with μ = 0.5 (wet road) and longitudinal velocity v
x
= 25 m/s. According to Figure 8(a), the proposed controller still has a better path-following performance. However, it is challenging for the MPC to track the desired path properly because of the lateral error. Figure 8(d) reveals that MPC can not eliminate the error at the end of the manoeuvre. The utilization of AFS (Figure 8(f)) in the controllers is similar to the previous simulation in Figure 5. Again, the proposed controller is more successful in using DYC to decrease the error, according to Figure 8(b). MPC showed less sensitivity to the environmental changes and uncertainties, which resulted in a weak path-following performance. Simulation results with μ = 0.5 (wet road), v
x
= 25 m/s and 20% uncertainties of front and rear tires cornering stiffness, vehicle mass, moment of inertia in a double lane change (DLC) manoeuvre. (a) vehicle’s path. (b) external yaw moment. (c) sliding surface. (d) lateral error. (e) e1 and e2. (f) steering wheel angle.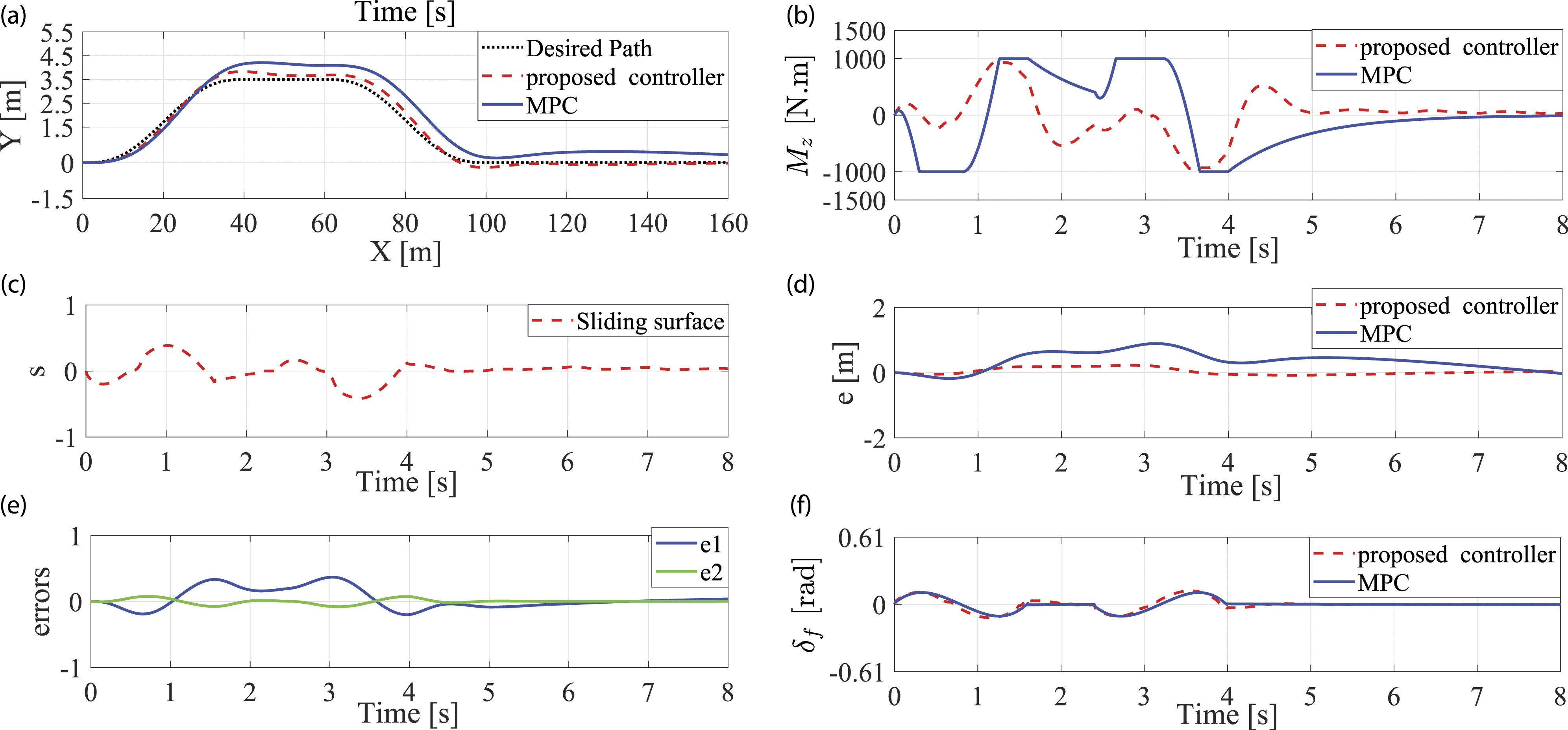
Finally, simulation results presented in Figure 9 demonstrate the controller performance on wet road with a longitudinal velocity of v
x
= 30 m/s. This scenario clearly distinguishes the advantages of the proposed controller compared to the MPC. Higher longitudinal velocity makes the path-following harder for MPC and results in a steady error. The result of the last scenario is shown in Figure 10. In this scenario, the performance of the controller was simulated on a dry road with a longitudinal velocity of v
x
= 30 m/s. Because of the better road condition, the path-following performances of both controllers are close to each other. But, MPC still shows weak performance in applying total moment as shown in Figure 10(b). In most scenarios, MPC has a steady error which is the result of the vehicle model and uncertainties considered in control design. Simulation results with μ = 0.5 (wet road), v
x
= 30 m/s and 20% uncertainties of front and rear tires cornering stiffness, vehicle mass, moment of inertia in a double lane change (DLC) manoeuvre. (a) vehicle’s path. (b) external yaw moment. (c) sliding surface. (d) lateral error. (e) e1 and e2. (f) steering wheel angle. Simulation results with μ = 0.9 (dry road), v
x
= 30 m/s and 20% uncertainties of front and rear tires cornering stiffness, vehicle mass, moment of inertia in a double lane change (DLC) manoeuvre. (a) vehicle’s path. (b) external yaw moment. (c) sliding surface. (d) lateral error. (e) e1 and e2. (f) steering wheel angle.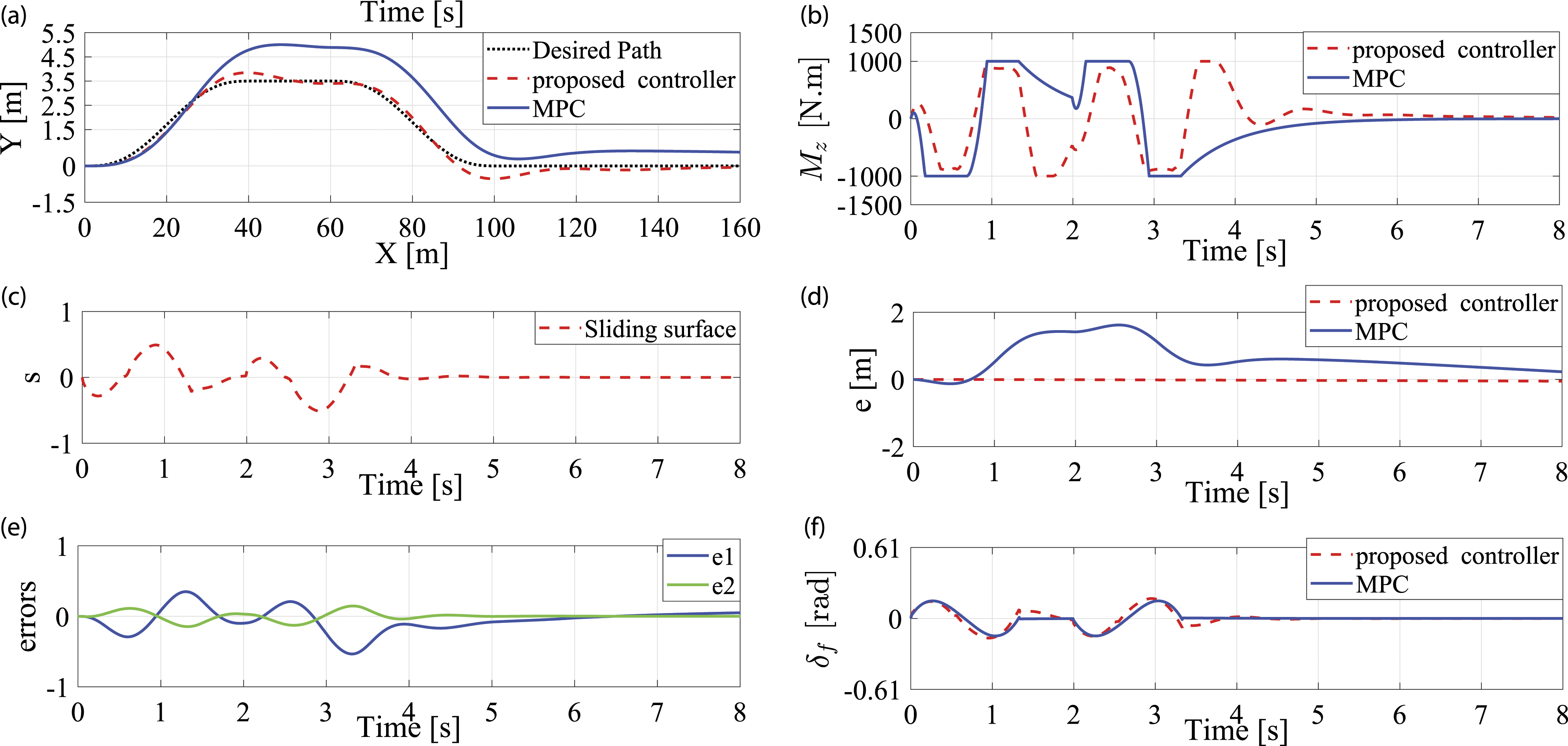
To sum up, the proposed controller demonstrates a better path-following rather than MPC and controller in Ref. 26 in different road conditions (dry, wet and icy). The proposed controller responds faster to changes in the manoeuvres compared to other controllers. Also, the sliding surface, e1, e2 and total error converged to zero in finite-time which is demonstrated explicitly. In total, the proposed controller is more robust than MPC against uncertainties and have better performance than controller in Ref. 26 in a same condition.
Conclusion
This paper investigates the path-following performance of an AFIDEV in the presence of uncertainties. MPC has been recently used for this application, but the performance of MPC reduces in the presence of various uncertainties such as the vehicle mass and road condition. Thus, a coordinated control for path-following of an AFIDEV is introduced which considers uncertainties of tires cornering stiffness, vehicle mass, moment of inertia and different road conditions. The proposed coordinated control is based on a two-layer hierarchical structure. In the upper-layer controller, a self-tunable super-twisting sliding mode control (ST-SMC) integrated with MPC is introduced in order to improve the MPC robustness with respect to uncertainties. Simulation results revealed that the path-following performance of the proposed controller is better than the single MPC in the presence of 20% uncertainties. The proposed controller also shows an improvement in path-following performance of the vehicle in severe conditions such as wet (μ = 0.5) and icy (μ = 0.3) roads with high longitudinal velocities of 20 m/s, 25 m/s and 30 m/s. The best way to verify the performance of the proposed controller is to conduct a real-time simulation on commercial vehicles, which will be considered in future experimental studies.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the Natural Sciences and Engineering Research Council of Canada [Grant No. RGPIN-2019-05361].