
Abstract
Many optimal design problems in the engineering field are nonlinear, multivariate, mixed integer, multimodal, and constrained. Meta-heuristic approaches have been widely used to solve these complex problems, but most of them are often sensitive to the settings of tuning parameters for different optimization problems, and suffer from premature convergence during the evolution process. This article proposes a novel hybrid teaching-learning-based optimization (HTLBO) algorithm to tackle this problem. A comprehensive teaching-learning mechanism with no adjustable parameters is introduced to improve the global optimal solution while in the meantime maintaining the solution diversity. The performance of the proposed HTLBO is tested on nine unconstrained benchmark functions and two nonlinear constrained benchmark functions with integer variables. Then the algorithm is applied to solve two significant electromagnetic design problems, that is, optimal brushless direct-current (BLDC) motor design and electromagnetic actuator geometric construction design. Simulation results on both the benchmark functions and practical engineering design problems confirm the efficiency and robustness of the proposed algorithm.
Introduction
Electromagnetic design is a key stage in many engineering systems. Optimal structural design to reduce the overall cost by reducing the materials used in the construction phase is attracting substantial interests in both academia and industry. Among various electromagnetic design problems, the brushless direct-current DC (BLDC) motor and electromagnetic actuator have been widely used in industrial and household products due to their high efficiency, flexibility and reliability. 1 The BLDC motor replaces the commutator and brushes with electronic circuit solutions and overcome their safety issue. Electromagnetic actuator is a connector with fast response speed and simple structure. Optimal structural design of electromagnetic machines is more complex than traditional machines, as many constraints and design parameters exist in the design problem, including integer and continuous variables. In view of the non-linear and mixed-integer nature of the above two problems, a key to solve these electromagnetic design problems is to develop resultful methods used for the identification of model parameters.
Optimization methods for solving nonlinear mixed-integer problems can be divided into two categories: heuristic and metaheuristic methods. The branch-and-bound method, the cutting planes technique, and the Lagrangian relaxation algorithm are considered as the most known heuristic methods. Branch-and-bound method is developed to resolve discrete or mixed constrained optimization problems, 2 the cutting planes technique is used in integer and mixed integer program, which is used to handle valid inequalities for a wide class of structural design problems, 3 and Lagrangian relaxation algorithm is used to provide bounds in a branch and bound algorithm. 4 Generally, these methods need a start point that may lead the algorithm to be easily trapped in local optima, and the computation cost is often extremely high in solving complex optimization problems.
Since heuristic methods have difficulties in solving real world complex design problems, metaheuristic approaches inspired by natural phenomena have been intensively researched in the past decades and genetic algorithm (GA), 5 particle swarm optimization (PSO), 6 differential evolution (DE),7,8 artificial bee colony (ABC) 9 and ant colony optimization (ACO) 10 have accomplished the application in electromagnetic design problems. Metaheuristic approaches have shown to reach an approximate optimal solution with a population of individuals evolving toward the global best solution of the fitness function. More and more successful applications have been reported in solving engineering design problems in recent years,11–18 including the optimal design of BLDC motors and electromagnetic actuators. For example, Potnuru et al. 19 presented a new developed nature-inspired flower pollination algorithm to design the speed control of BLDC motor with optimal PID tuning and successfully demonstrated its effectiveness by comparing with other methods. Merugumalla 20 optimized the PID controller parameters of the BLDC motor drive using PSO and BA. Sadrossadat and Rahmani 21 proposed an artificial neural network (ANN)-based L-P metric technique for parameter optimization of BLDC motors. Yoon and Baek 22 developed an efficient robust design optimization algorithm to improve the torque characteristics of BLDC motors by taking into account the design variable uncertainties. Deng et al. 23 used an application-oriented robust design method to consistently optimize an electromagnetic actuator of the photovoltaic system and validated its effectiveness. However, the performance of these metaheuristic approaches are often sensitive to the choice of tuning parameters for different optimization problems, and may suffer from premature convergence during the evolution process. It is therefore essential to develop simple yet effective metaheuristic methods with fewer parameters for challenging engineering problems.
Being motivated to tackle the aforementioned challenges, this paper proposes a novel hybrid teaching-learning-based optimization (HTLBO) algorithm with no tunable parameters. Teaching-learning based optimization (TLBO) is a relatively novel metaheuristic method proposed by Rao et al. 24 for constrained mechanical design optimization problems, which imitates the process of the classroom teaching between the teacher and the students (learners). The main advantage of TLBO is that it has no adjustable parameters except the size of population. TLBO has been widely used in various optimization problems14,25–29 and has demonstrated desirable performance in solving practical engineering design problems, such as heat exchangers, 30 plate-fin heat sink, 31 and solar cell models. 32 Further, a number of variants have been proposed to improve the TLBO performance33–35 in solving more complex problems. However, TLBO is proposed to get global optimum results for continuous nonlinear optimization problems, which is not suitable for problems with integer variables. Moreover, employing only the teacher information in teacher phase and just two learners in learner phase may lead to local optima and premature convergence.
To address these issues, a hybrid teaching-learning based optimization method namely HTLBO is proposed, which retains the advantages of concept simplicity and easy implementation of TLBO, while it has no adjustable parameters, which makes it suitable for solving a range of complex mixed integer programing problems. In HTLBO, the teacher is retained in teacher phase and an additional search direction is introduced for better guidance of the individuals to the global best solution. Moreover, a new learning mechanism is established with combinations of the information obtained by the random search direction of each single dimension from each student. Further, in order to explore the feasibility solutions for the integer variables, a novel integer variable handling strategy is introduced. To enhance the diversity of population and global search capability, HTLBO is applied to the structural design of BLDC motors and electromagnetic actuators. The optimization results confirm the effectiveness of the proposed HTLBO for solving mixed integer nonlinear constrained electromagnetic design problems in real world. To assess the performance of proposed HTLBO, nine unconstraint benchmark functions and two typical mixed-integer constrained nonlinear benchmark functions are tested and the results show that HTLBO outperforms TLBO, GA, PSO, DE, ABC, and HS.
The remainder of this article is organized as follows: In Section 2, the mathematical formulations for BLDC motors and electromagnetic actuator are provided. The proposed HTLBO and constraint handling are introduced in Section 3. In Section 4, the proposed method is tested on two typical benchmark functions and is employed to solve the BLDC motor and electromagnetic actuator design problems. Finally, the article concludes in Section 5.
Engineering design optimization problems
The BLDC motor problem formulation
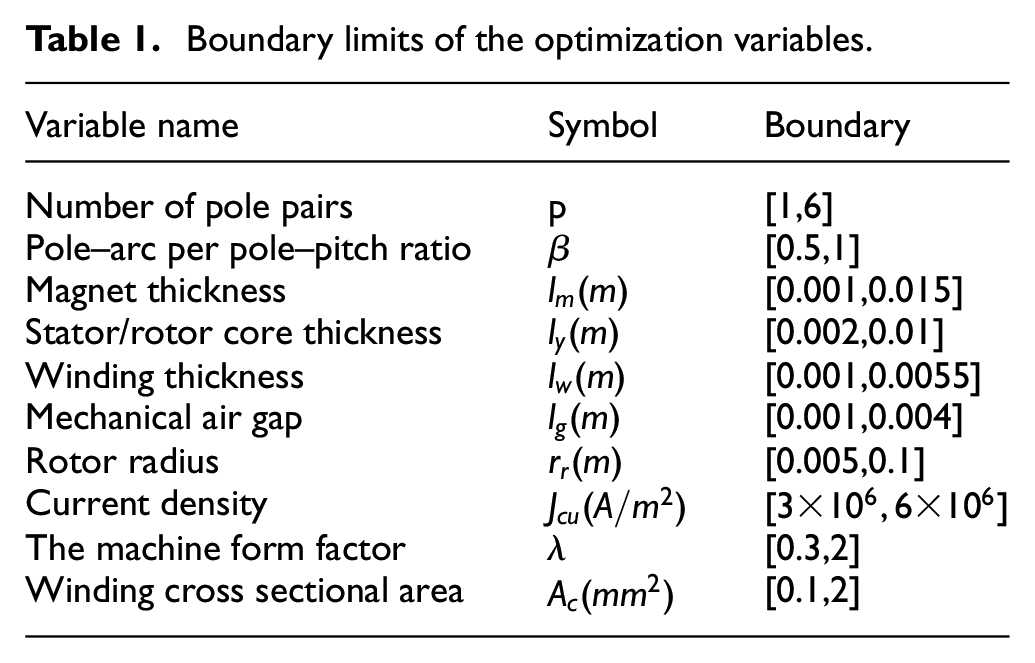
The cross-section area of a slot-less BLDC motor is illustrated in Figure 1. In this article, these geometric parameters are the optimization variables that contain nine continuous variables and one integer variable. The specific requirements of these parameters are listed in Table 1. The boundaries denote the possible range of the decision variables, respectively. The optimization variables are represented as a vector,

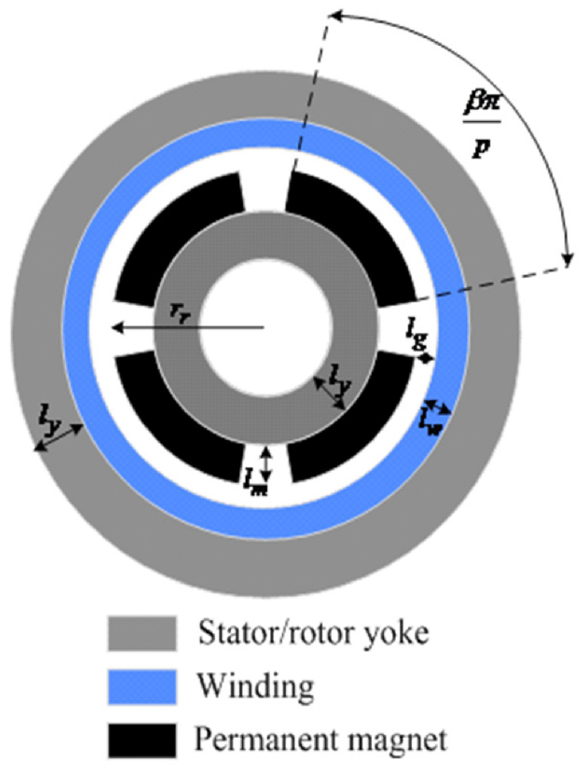
Illustration of the key parameters of the BLDC motor.
Boundary limits of the optimization variables.
Objective function
To formulate the objective functions and constraints is the first stage in optimization programing. The main optimization objective of the BLDC motor is to identify the optimal geometric specifications that minimize the objective function and meet the requirements. In this article, the objective function is simultaneously minimizing a combination of power loss, cost, and volume. Three scalar weighting factors are introduced to make all the objectives comparable and control the importance of each individual objective. The general BLDC problem can be formulated as follows:

where
Material cost
To incorporate the total cost of motor materials into the optimization problem, it is necessary to calculate the cost of several parts including the cost of magnet, windings, and stator or rotor core. The expression can be written as follows:

where
Volume of materials
The volume of stator or rotor core

where
Total power loss
Generally speaking, the power losses of an electric motor can be classified as: electrical, magnetic, and mechanical. The total power loss of the BLDC motor can be written as:

Due to the winding resistance, the electrical loss can be formulated as:

Where
The magnetic losses of the core material are primarily due to the hysteresis and the eddy current losses, which can be expressed as:


where
Suppose the air gap magnetic flux equals the core magnetic flux, then the stator core maximum flux density is given by:

where
The mechanical losses include both windage and bearing friction, and the bearing friction is often calculated by:

Where
Despite the dependence on the rotor parameters, windage losses can be neglected compared with other losses for a smooth cylindrical rotor. It is defined as follows:

where
Constraints
The terminal voltage is founded as follow:

The electrical requirement is the level of the motor voltage source,
Futhermore, several inequality constraints are used to represent the mechanical specifications.

In view of the magnetic and mechanical losses, the developed torque Tem can be approximately calculated as:
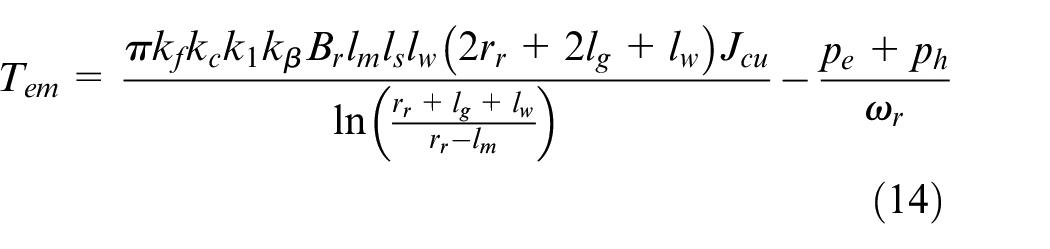
where

where
Additionally, the heat and saturation constraints are expressed as:


where
Formulation of electromagnetic actuators
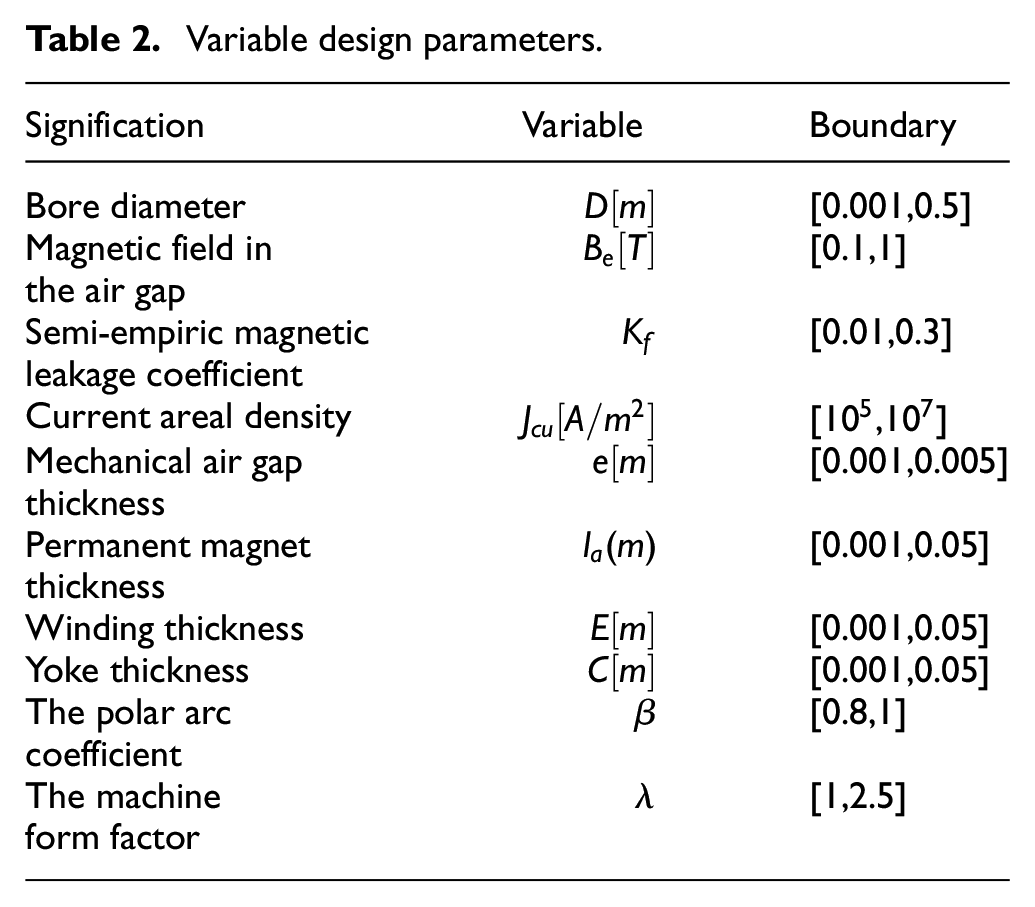
The electromagnetic actuator is a connector which conveys the active lateral torsion to the passive side with fast response speed and simple structure. The design of an electromagnetic actuator contains numerous parameters which follow the laws describing physical phenomena and the specifications of the scheduling requirements. The configuration and geometric structure of electromagnetic actuator are illustrated in Figure 2. The actuator design problem has 10 variables,

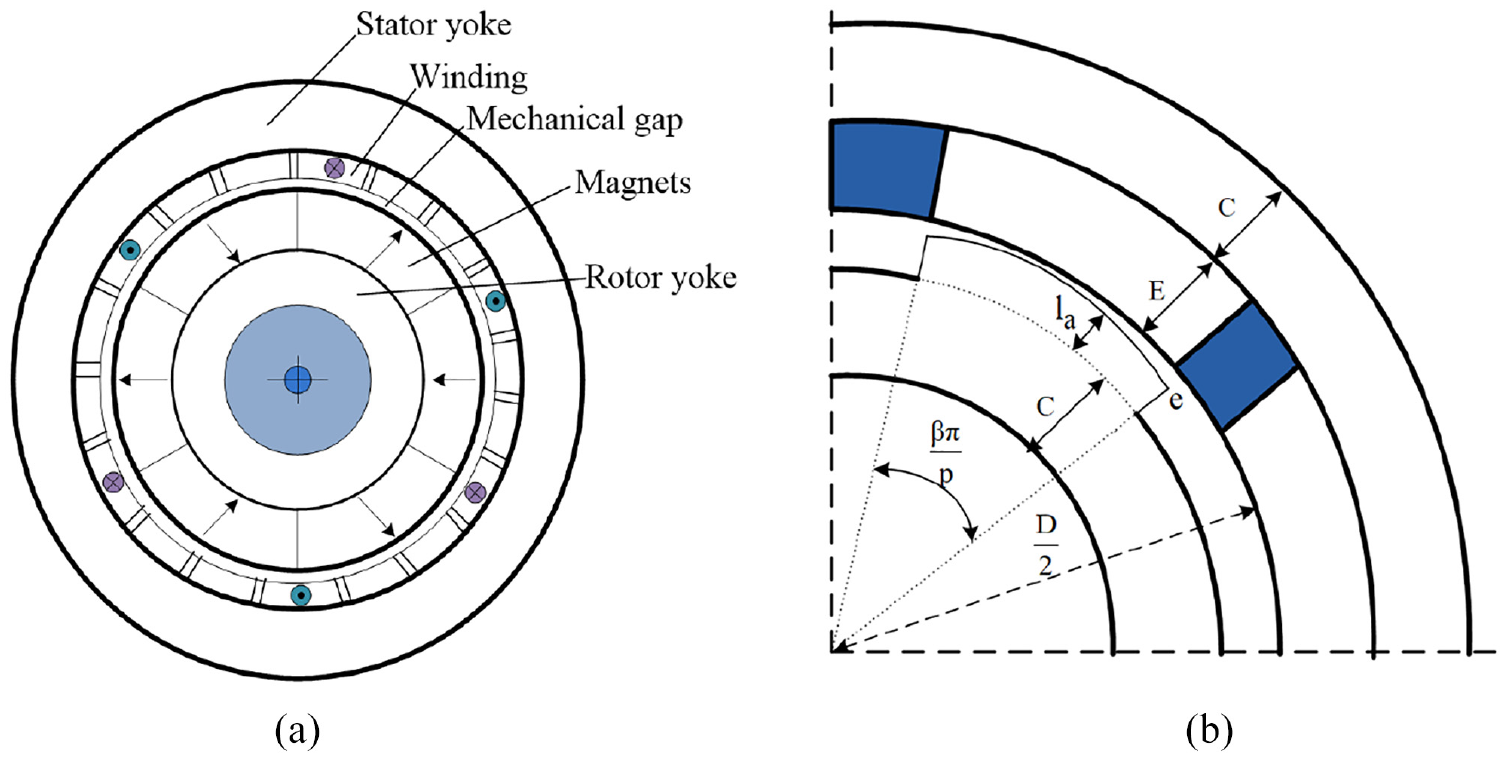
(a) Electromagnetic actuator configuration and (b) geometric structure.
Variable design parameters.
Objective function
The structural model contains 10 design parameters in the engineering fields of electrical, magnetic, mechanical, and heat. The details of the design parameters are given in Table 1 and Mazhoud et al.
37
In this model, the objective is to minimize the active parts volume

Constraints
The actuator design problem has 10 variables, which include four input variables and four output variables. The reformulated model only needs to handle four input variables while the remaining six output variables can be deduced by the specific order of six equality constraints.
The bore diameter

The current areal density can be roughly modeled as the quantity

If

The relation between the magnetic leakage coefficient and the geometric dimensions can be empirically formulated as:

Assuming purely radial flux density inductors in the winding, by integrating the production of no-load magnetic flux density over the whole zone, the electromagnetic torque is given as:

By neglecting the inter-polar leakages and armature reaction flux, the yoke thickness

Overview of the conventional TLBO algorithm
The TLBO is a kind of swarm intelligence-based algorithm 24 which imitates the process of teaching-learning between teacher and learners in a class. The teacher is regarded as the most respected and knowledgeable people in the class, therefore the best learner is chosen as the teacher. Teacher puts the maximum effort into disseminating knowledge among learners to improve the whole class knowledge level and help learners achieve better scores or grades. Moreover, learners can also improve their grades by learning through the interaction and communication among themselves in the class. Since both the teacher and the learners are the two crucial components, the TLBO process consists two phases, namely “Teacher phase” and “Learner phase.” The former refers to learning from the teacher while the latter refers to learning through the interactions among learners. These two phases are further elaborated below.
Teacher phase
In TLBO, each class has learners of different grades and the best learner is selected as the teacher. The teachers aim to improve the average performance of the whole class, while the improvement of each learner depends on its capability. The teacher phase can be described as:

where
Learner phase
In this part, through a range of learning exercises, each learner interacts randomly with other learners. Learners help each other to increase their level of knowledge .
where
The proposed new hybridteaching-learning algorithm
The TLBO has a number of merits such as simple in concept, demanding less computational effort, easy to implement, desirable consistency, requiring minimal storage and few algorithm parameters to tune. However, in the conventional TLBO, the teaching factor is chosen as either 2 or 1, which represents two extreme situations, that is, the learner either learns everything from the teacher, or learns nothing. Further, inappropriate interaction among two selected learners during learner phase may cause premature training and increase the chance of being trapped in the local minima. Given the above considerations, to enhance the exploration as wel as exploitation capacities, some improvements have been made to the basic TLBO.
An elite strategy is introduced in the TLBO to improve the population quality and the performance of the global best solution. 38 Integrated with the quasi-opposition-based learning concept, an efficient optimization approach, namely quasi-oppositional teaching-learning-based optimization (QOTLBO) was proposed to accelerate the convergence of the original TLBO algorithm. 39 A modified teaching learning algorithm (MTLA) was proposed which adds “a modification phase” to improve the process of knowledge learning by Niknam et al. 40 A new Levy mutation strategy based teaching-learning-based optimization (TLBO) algorithm was developed to enhance the accuracy and to increase the diversity of the population. 31 In this article, a new method namely hybrid teaching-learning based optimization (HTLBO) is proposed to further improve the performance of the conventional TLBO algorithm. It is important to note that the optimization process is only modified on the updating mechanism for design variables rather than adding extra controlling parameters. HTLBO focuses on reinforcing the global and local search capabilities that it enables searching feasible space more precisely and avoiding quickly being trapped by local optima.
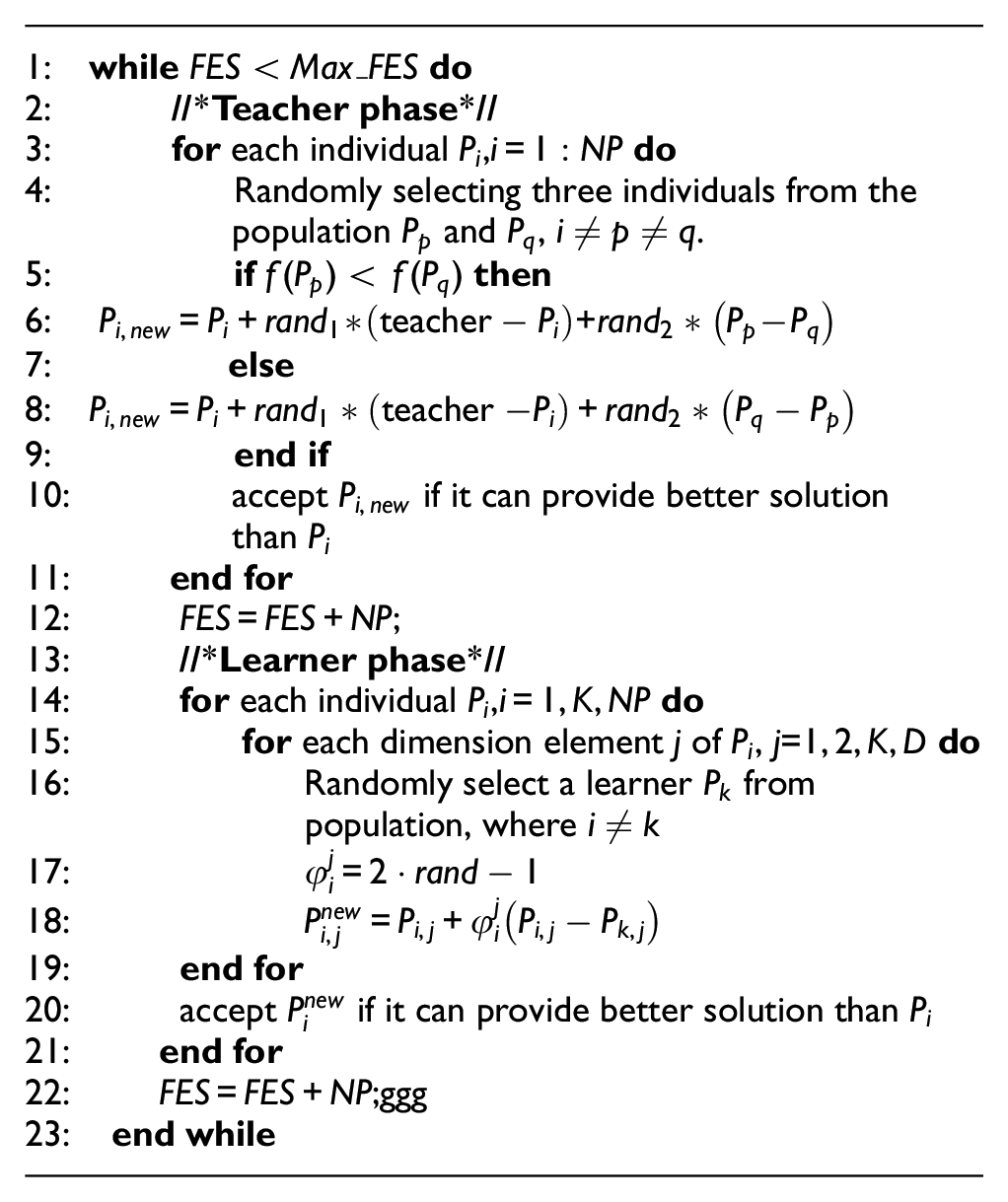
Hybrid teacher phase
In TLBO, the updating of all learners’ needs the guidance of the teacher which means the role of teacher is particularly important. The “Teacher phase” promotes exploitation since all the learners of the population at any iteration are attracted toward the same best position (pointed by the “teacher”). However, by employing only teacher for improving each learner’s performance, the knowledge of the class is updated defectively and the population may suffer a loss in its global exploration capability within a relatively few iterations, falling into the local optimum and resulting in premature convergency. 40
It is obvious that if the learner learns more, the solution will become better. In HTLBO, the character of teacher is retained within the framework and a search direction is introduced for better guidance of the individuals toward the global best solution. For inferior solutions recently explored, when compared in the current population, a new search direction will be provided with additional information for promising search direction which can be more beneficial than using only one difference vector. An explicit mathematic expression can be written as:
where
A more comprehensive learning mechanism which generates a learner with the help of both teacher and learners can greatly improve the population diversity, as well as enhance the globally search capability. The complete update rule for each individual is illustrated in Figure 3:
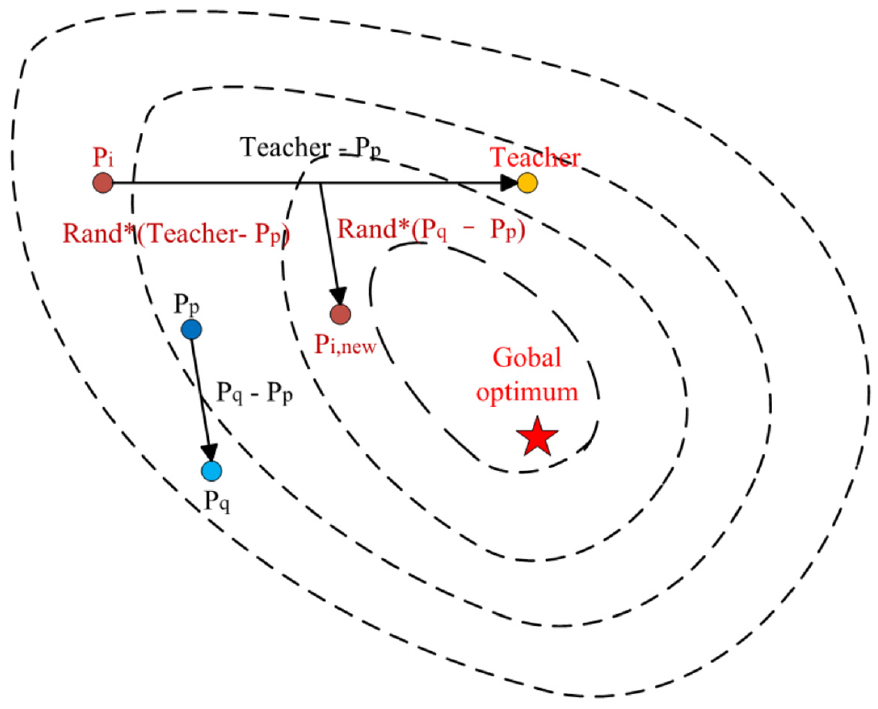
Updating strategy of each individual in teacher phase.
Hybrid learner phase
In the basic TLBO algorithm, each student improves knowledge by learning from two selected learners within the range [0, 1]. During the optimization process, as learners approach to each other and the whole population converges to a narrow region, the learners may have difficulties to escape from large plateaus or suboptimal peaks/valleys. To overcome these issue with the classical learner phase, it is more beneficial for a learner to use the cognition of learner groups, hence this article proposes a new method to incorporate interactions among learners while each learner combines the information obtained by the random search direction of each single dimension. 41 This feature is essential in the optimization process that each learner learns something new by updating itself with nearby learners. A detailed description for new learning mechanism is presented as follows:
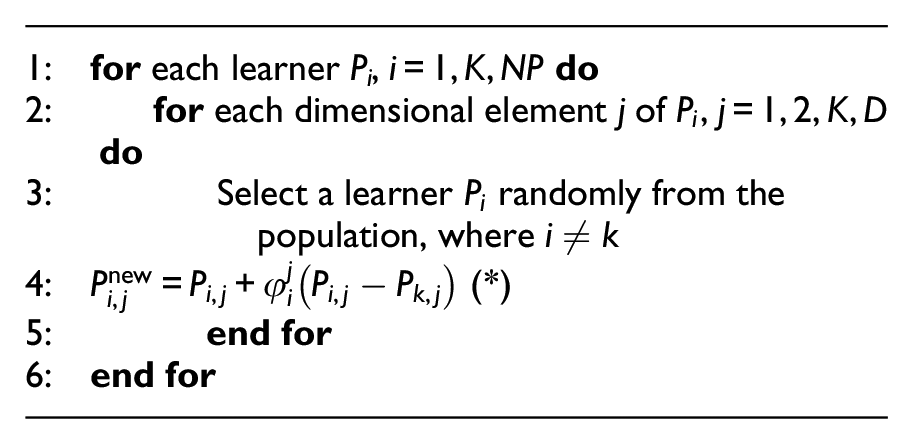
In the formula (*),
The procedure of HTLBO
The detailed steps of HTLBO for implementing the optimization problem is described as follows:
Step 1: Initialize the optimization problem and algorithm parameters.
Step 2: Initialize the population as a
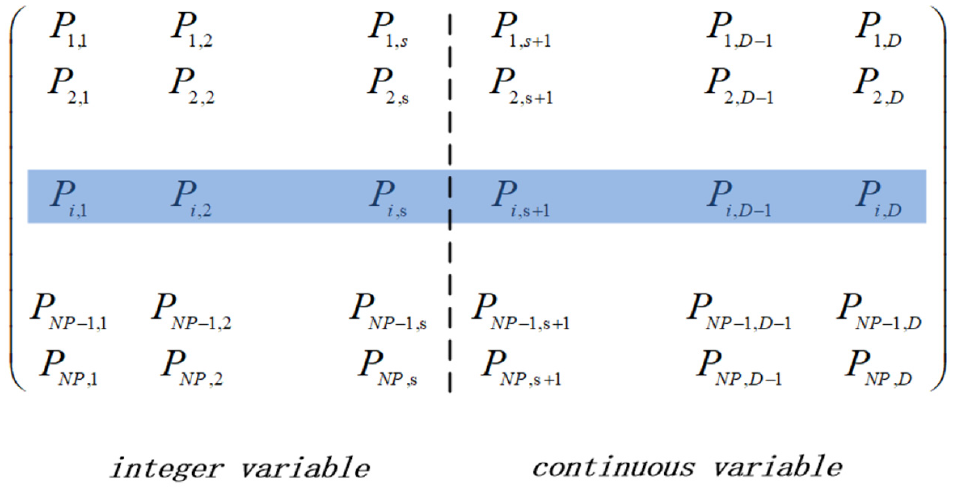
Population matrix.
For the integer variables of the

For the continuous variables of the

where
Step 3: Adjust
Step 4: Calculate the objective value for
Step 5: Update the solutions with HTLO. The main update procedure of the HTLBO is presented as follows:
Step 6: Check for stopping criteria, if
Step 7: Terminate the procedure and output the best solution stored in P.
To strike a suitable balance between global and local search capabilities of the proposed method, the new gradient descent approach is introduced to optimize the population during the teacher phase. The new learner phase aims to reinforce local search capabilities, in which the local search is strengthened to efficiently avoid premature convergence. The modified optimization process focuses on the design variables themselves rather than adding extra updating mechanism, which enables a more precisely space search and decreases the implementation complexity. The main advantages of the new method are summarized as follows:
It can solve a range of engineering optimization problems which contain mixed integer nonlinear constrained programing.
The learning ability is enhanced to achieve faster convergence while the diversity of population is maintained to prevent premature convergence.
It is simple to implement since no extra parameters are introduced except the population size.
Experiment simulations and result analysis
In this article, all programs were coded using MATLAB and the tests were conducted on a PC with Pentium (R) Dual-Core CPU with 3.20 GHz and 8 GB RAM memory. The proposed HTLBO method is tested on nine unconstrained continuous benchmark functions, two constrained nonlinear benchmark functions, and two electromagnetic device design problems to demonstrate its effectiveness and applicability. In order to analyze the performance of the proposed HTLBO algorithm, it is further compared with some state-of-the-art metaheuristic optimization algorithms including TLBO, HS, ABC, DE, PSO-W, and GA. It should be noted that the GA method was developed as a tool box by the University of Sheffield. The parameter settings for these original versions of methods are available in the relevant references.
Sensitivities to the population size
The population size is a critical parameter in HTLBO due to the one-to-one reproduction strategy. If a very large population size is selected, then the computational complexity of HTLBO will increase considerably and has the difficulty to locate the optimum. On the other hand, if the population size is very small, the diversity will decrease considerably which increases the probability to get trapped in local optima. To find an appropriate population size, the HTLBO is tested on the three problems with dimensions of 30, 50, and 100, respectively, while 30 independent trials were conducted for each problem.
Results, reported in Figure 5, illustrate the convergence performance of HTLBO with different population sizes for a given maximum number of fitness evaluations (
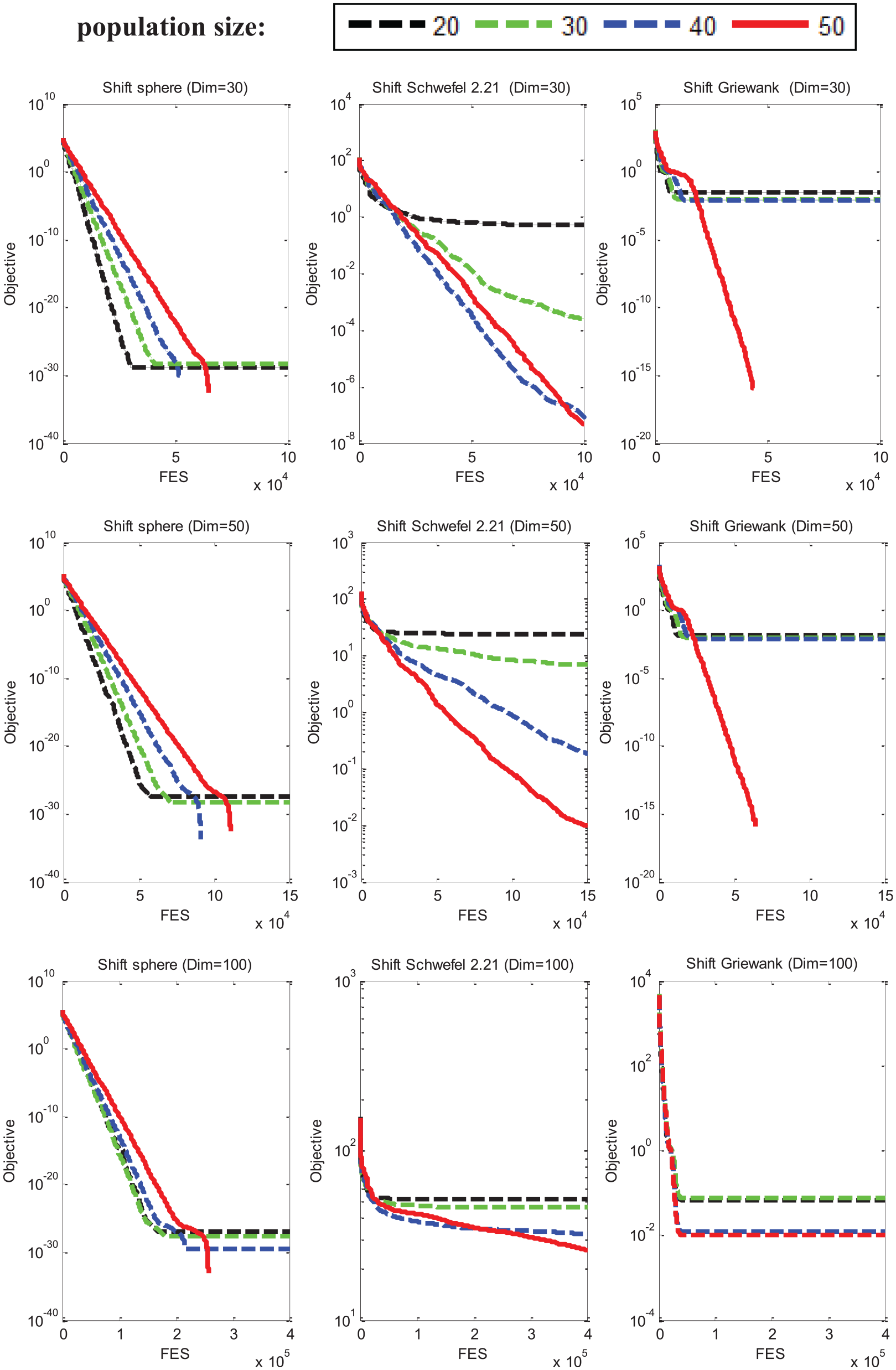
Mean convergence charateristics of HTLBO under different population sizes.
Test on unconstrained benchmark functions
In the literature, many methods were tested on problems with global best solution being located at the center of the whole searching space, for the sake of fairness, the shift strategy is applied to evaluate the performance of different methods. Compared with these conventional benchmark problems, the shifted ones are more challenging and have been widely used in numerical optimization problems.43–45 In this section, nine shifted benchmark functions listed in Table 3 are introduced to test the performance of the HTLBO algorithm to assure a fair comparison. According to their properties, these functions are categorized as three groups:
Formulation of benchmark functions.
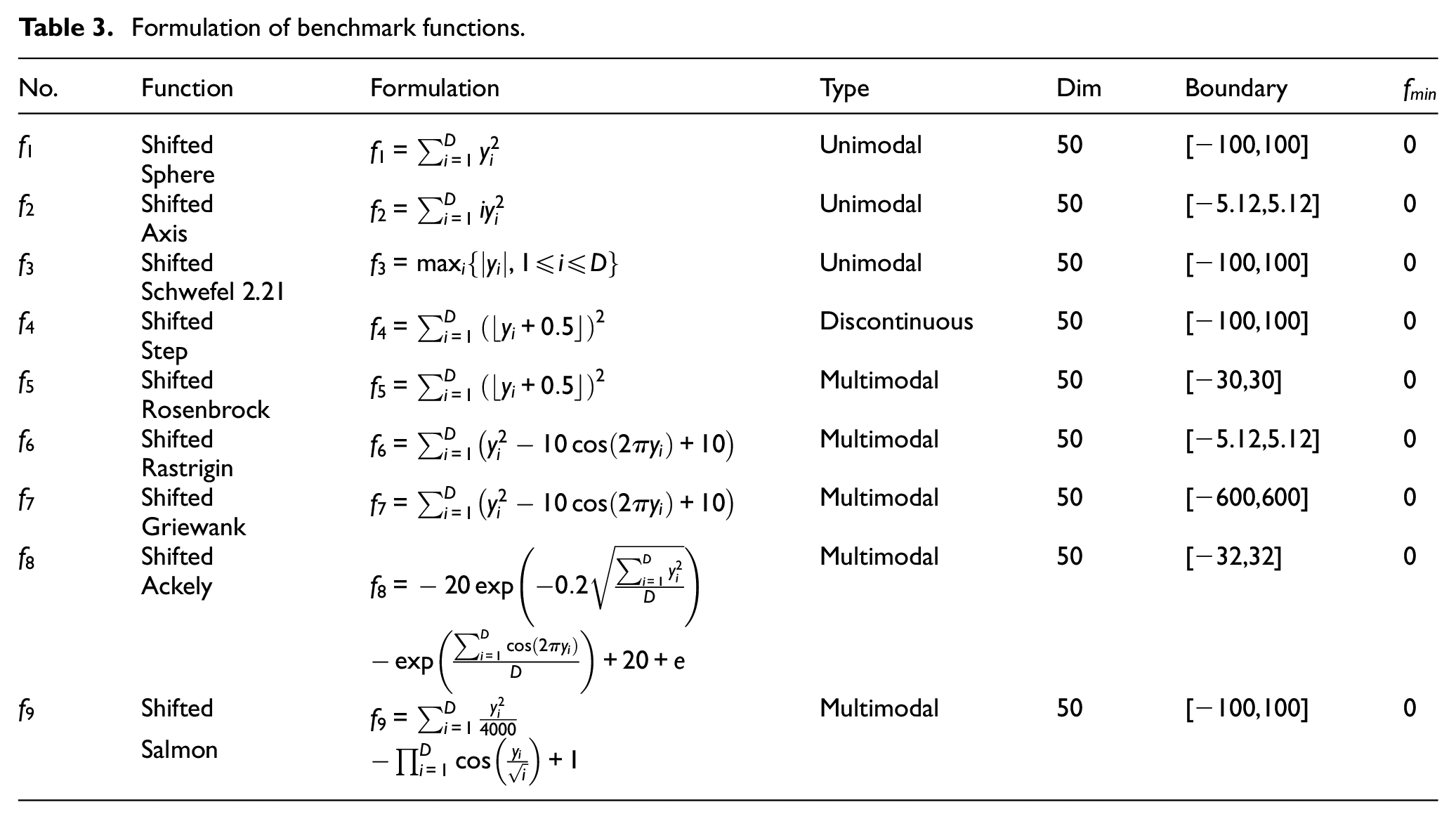
In Table 3,
Tables 4 and 5 are summaries of the simulation results for HTL, TL, HS, ABC, DE, PSO-W,
46
GA, SaDE,
47
CLPSO,
48
CMA-ES,
49
HTLB, TLBO on the benchmark problems
Comparison of methods on average results over 30 runs for 50D.
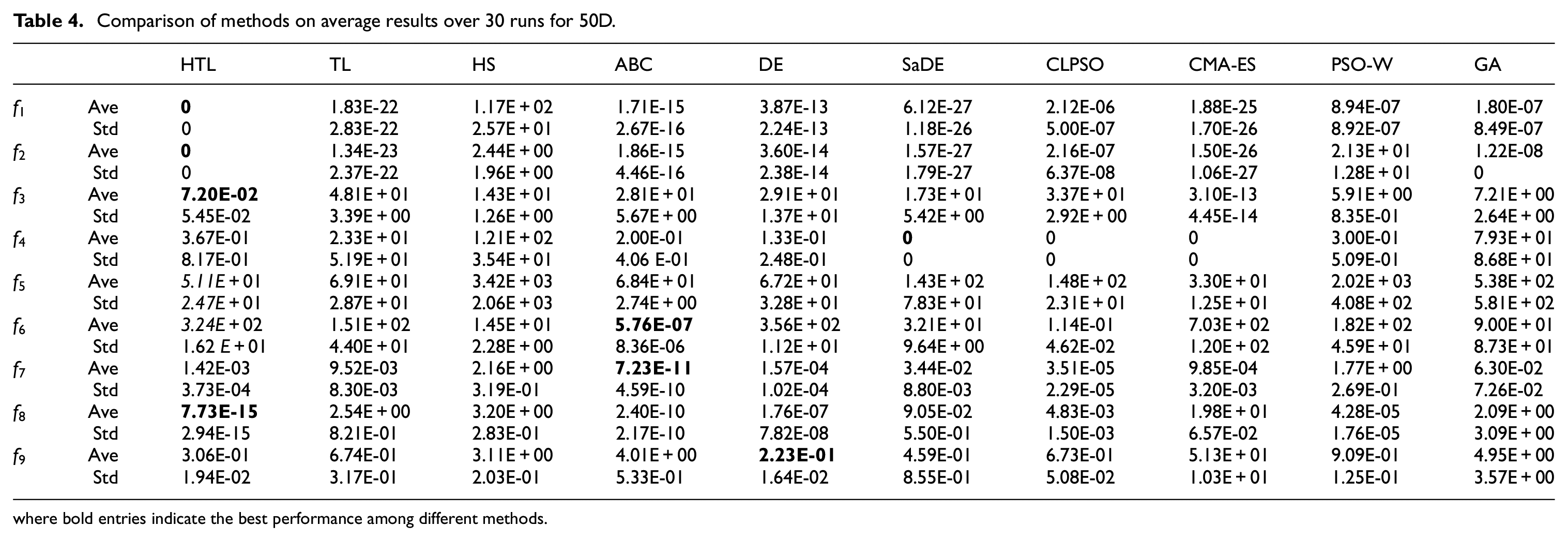
where bold entries indicate the best performance among different methods.
Mean computational time over 30 runs for 50D by HTLBO and TLBO.

Testing of mixed integer nonlinear functions with constraints
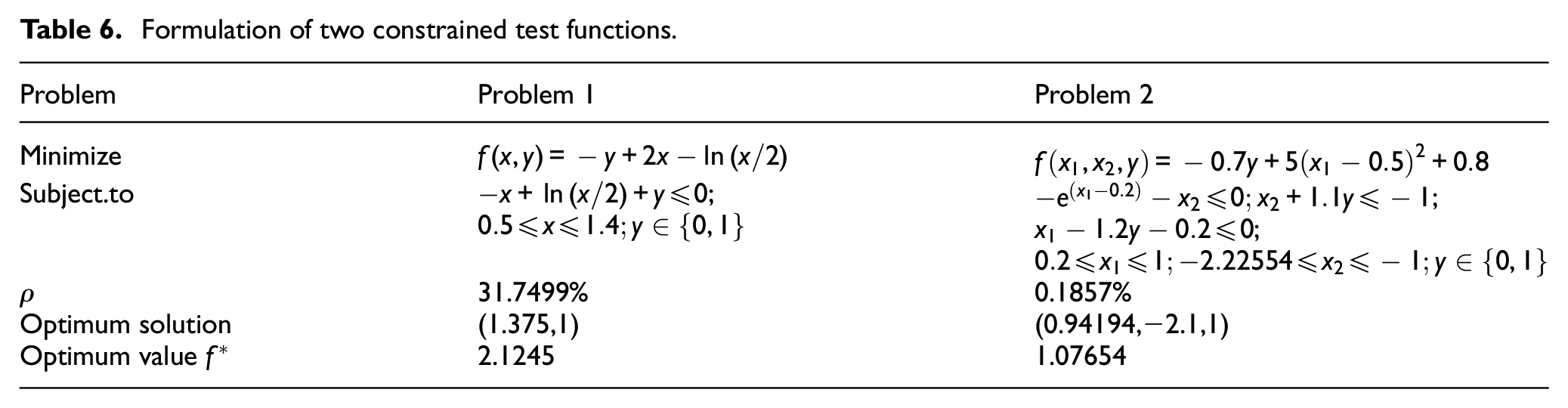
In this section, two benchmark constrained nonlinear functions are tested to verify the performance of the proposed HTLBO quantitatively. The two test functions have continuous and integer variables and their detailed information are given in Costa and Oliveira.
50
The expressions, constraints, true global optimum solutions, and corresponding true global optimum values are listed in Table 6. To estimate the difficulty of the test problems, feasible points are generated through a purely random process, and the
Formulation of two constrained test functions.
To ensure a fair and valid comparison of different algorithms, the (
Results of various methods for the first system.
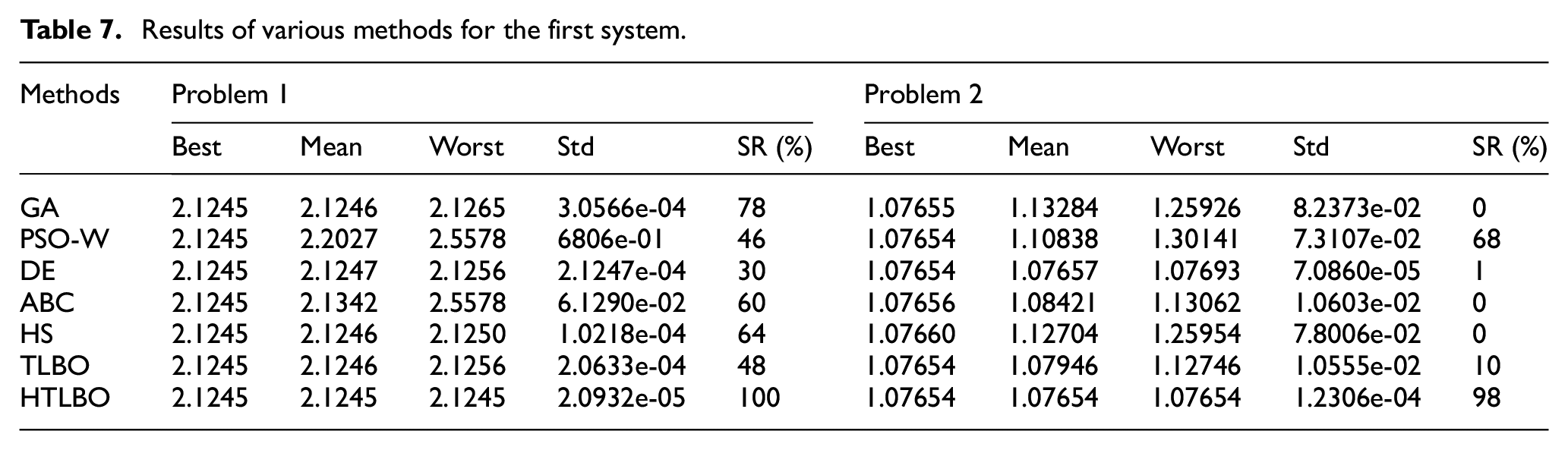
Comparison results of HTLBO with other six state-of-the-art algorithms for the two test constraint problems are listed in Table 7. It is shown that all algorithms can find the global optimal value 2.1245 of the test problem 1. In terms of search success rate, HTLBO is 100%, the TLBO is 48%, and the rest of algorithms vary from 30% to 78%, which illustrate the superiority of the suggested HTLBO over other algorithms. On the test problem 2, it is observed that only PSO-W, DE, TLBO, and HTLBO can yield the best result 1.07654 for problem 2, while GA, ABC, and HS failed. It is shown that HTLBO is able to produce superior performance among all the methods in reaching the global optima robustly as measured by the successful rate. According to Table 7, it is evident that the proposed HTLBO algorithm significantly outperformed other algorithms, which confirms that the HTLBO is proved highly potential in solving mixed integer optimization problems with constraints.
Note that many real world problems can be formulated as constrained mixed integer non-linear programing problems. These problems, exemplified by the two test functions, due to strongly nonlinear and combinatorial nature, are considered difficult problems in the engineering field. Table 7 confirms that the proposed HTLBO algorithm can consistently outperform the existing meta-heuristic approaches in terms of the following aspects. (1) Accuracy. It is clear that HTLBO is always capable of identifying the best solutions. (2) Performance variation. The statistics shows that HTLBO offers extremely consistent performance in repeated runs. (3) Adaptability. The two problems are completely different optimization problems. HTLBO has demonstrated superior performance in both cases, implying its adaptability to different engineering problems in offering the best performance. To further demonstrate its outstanding performance, the HTLBO is applied to solve two important optimal engineering design problems, namely BLDC motor optimization and electromagnetic actuator optimization.
BLDC motor optimization results
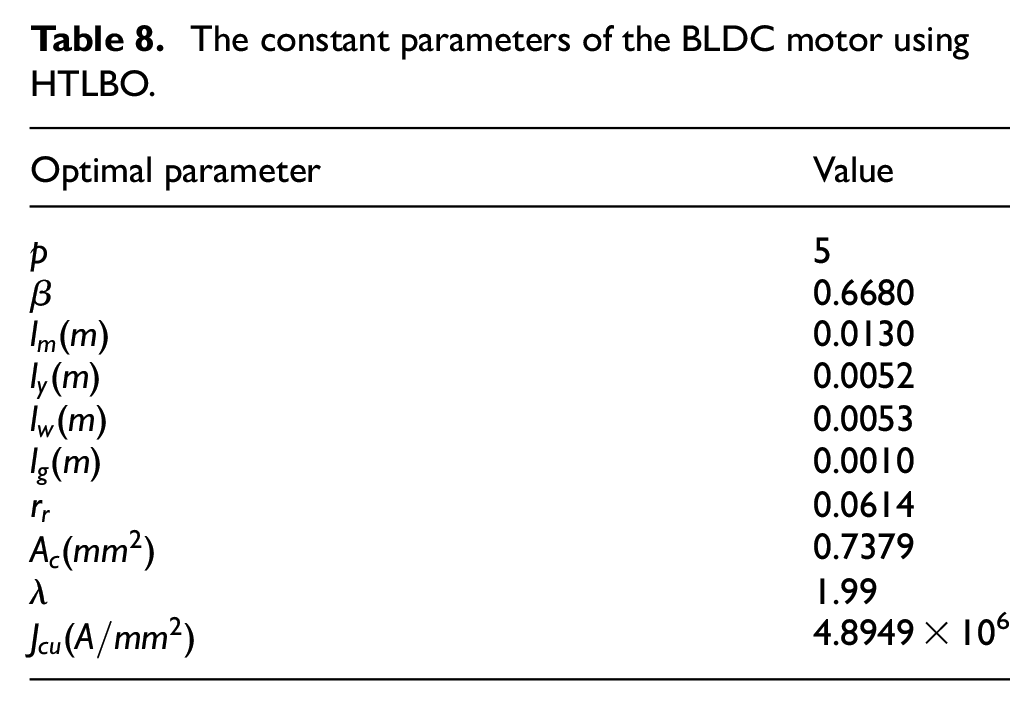
Before solving the optimization problem, the constant parameters of the motor are derived from Rahideh et al. 36 To further investigate the performance of the proposed HTLBO algorithm, a number of simulation experiments were performed on the BLDC motor design problem. In the experiment, to handle the constraints in the optimization problem, the penalty function scheme is employed to convert the constrained problem to an unconstrained one by adding an additional term in the objective function, representing the level of constraint violations in the original objective function. The penalty factor is set as 100, which is a relative value comparing to the objective value. In the case study, the population size and the number of objective function evaluations are set to 50 and 10,000 in the HTLBO algorithm, respectively.
Some popular algorithms are tested as well as a comparison purpose with the proposed HTLBO algorithm, while 10,000 objective function evaluations are allocated to all the simulation experiments. The corresponding optimum solution achieved by HTLBO is listed in Table 8. It is obviously clear that the solution does not involve violation of constraints. The statistical results of total 30 independent runs for different methods are summarized in Table 9.
The constant parameters of the BLDC motor using HTLBO.
BLDC design parameters by different methods.
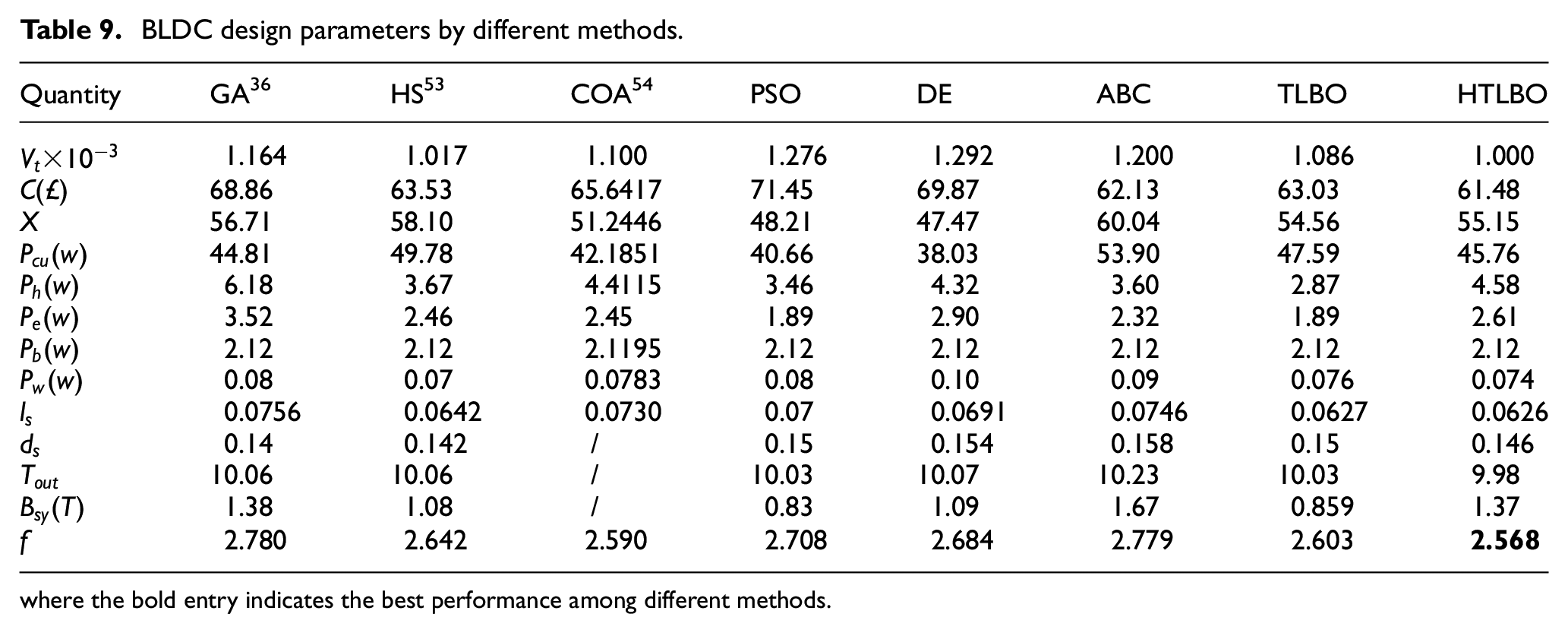
where the bold entry indicates the best performance among different methods.
Among the all approaches, HTLBO can yield the smallest total volume
To further confirm the effectiveness of the proposed HTLBO in the optimization of BLDC motor design, the distributions of the results of each independent run are illustrated in Figure 6. Obviously, results obtained by HTLBO outperforms the basic TLBO. Comparing with the basic TLBO, HTLBO performs much better in terms of the robustness as measured by the standard deviation. According to the experimental results on the BLDC motor design, it shows that HTLBO can achieve high quality results and significantly outperform TLBO in the case study.
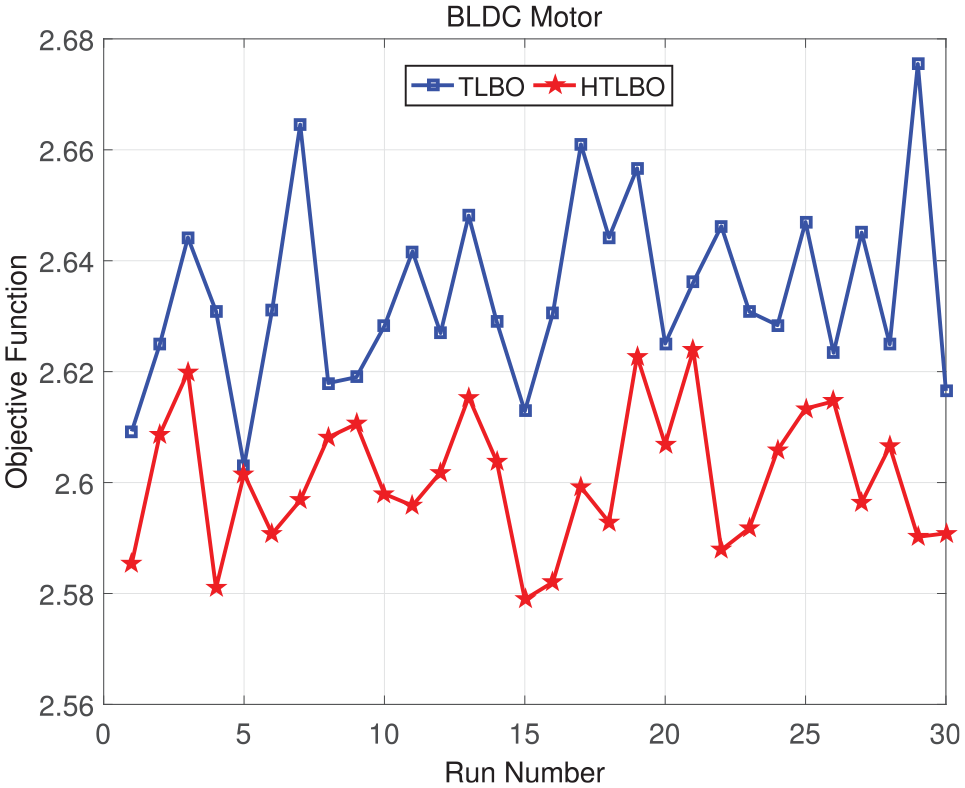
Distribution of best results over 30 independent runs by TLBO and HTLBO.
Electromagnetic actuator optimization results
The structural model includes the dimensioning parameters of a simplified electromagnetic actuator corresponding to various constraints. It is hard to find feasible solutions of the structural design model due to the aggregation of six nonlinear equality constraints in different engineering fields: electrical, magnetic, mechanical and heat. To improve precision and convergence and while to avoid blind searching, a reformulation technique of the electromagnetic actuator is adopted aiming to improve the efficiency of the HTLBO. Consequently, the final constrained optimization problem contains 10 parameters, while the parameters for HTLBO are set as follows: the population size is set as 50,
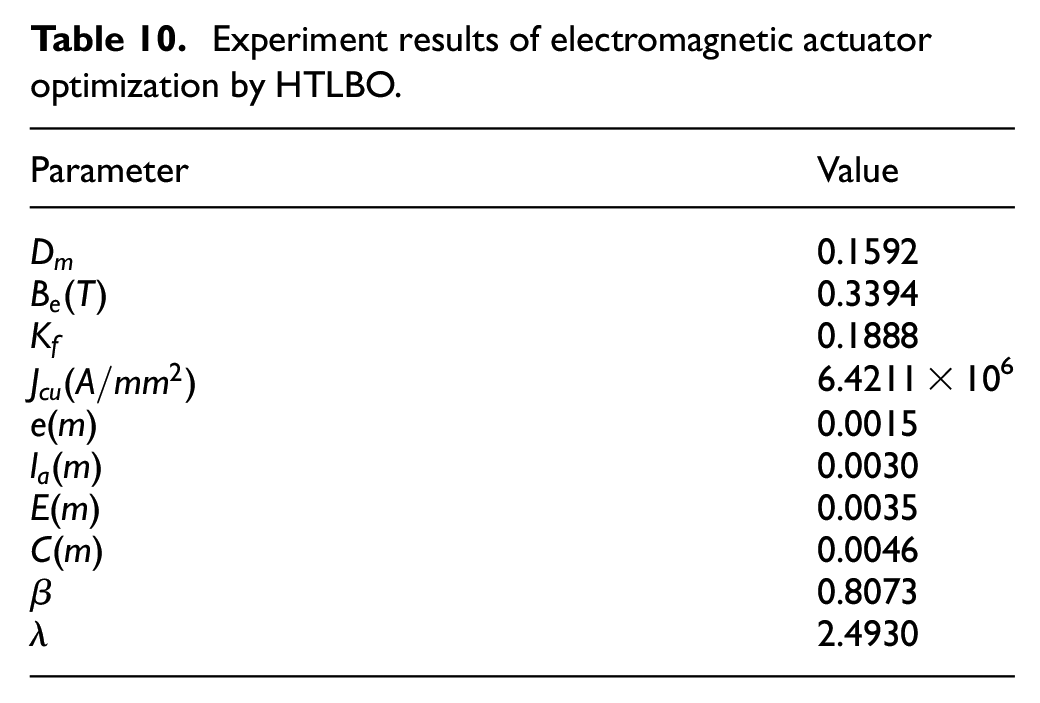
Several experiments were conducted on the actuator design problem using the basic TLBO optimization technique and the-state-of-art methods. The optimal parameters satisfying 6 hard equality constraints using the proposed HTLBO algorithm are listed in Table 10.
Experiment results of electromagnetic actuator optimization by HTLBO.
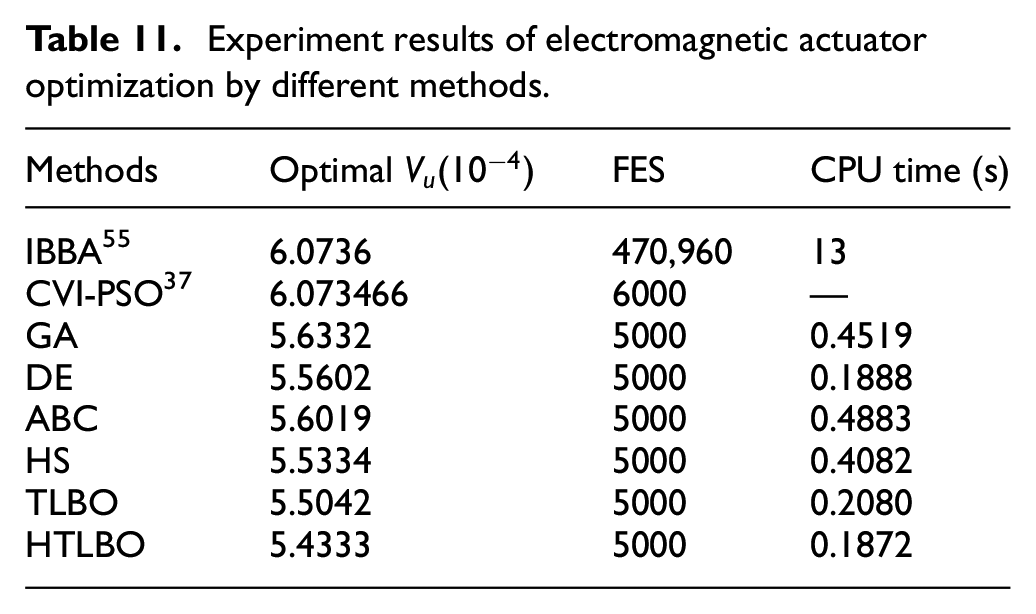
The simulation results obtained by a series of methods are shown in Table 11. In a recent work,37,55 the IBBA and CVI-PSO can reach the optimal solutions with greater efficiency. Futhermore, a decrease in the volume is evident based on GA, DE, ABC, HS, and TLBO. It is found that an optimal solution with less precision
Experiment results of electromagnetic actuator optimization by different methods.
To demonstrate the performance of the proposed HTLBO in enhancing the convergence compared with the basic TLBO, Figure 7 illustrates the variation of the objective function values during the iteration process for both the basic TLBO and HTLBO. Comparing the TLBO, the convergence speed of HTLBO is faster at the later period of iterations. This implies that the local search scheme in HTLBO plays a key role which takes much less generations to overstep the local extremum and find a better solution. In summary, HTLBO is more competitive with the proposed teacher and learner operators. For solving the constrained problem with integer variable as electromagnetic actuator, HTLBO exhibits its superiorities over other methods.
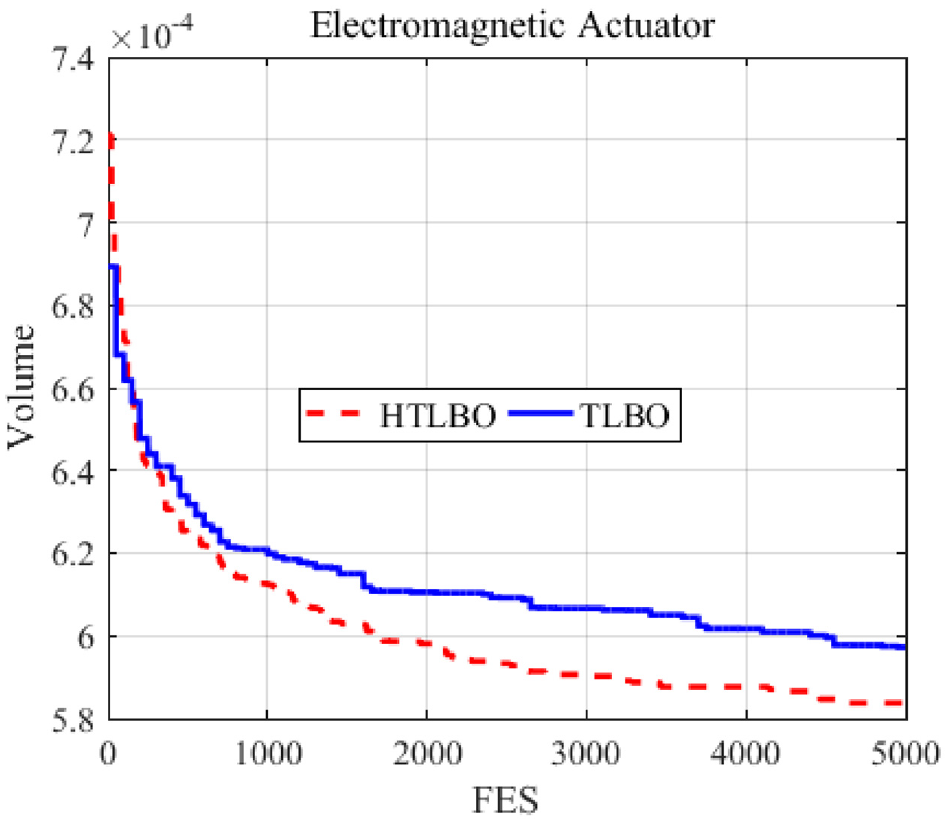
Convergence characteristics of TLBO and HTLBO.
Conclusion
In this article, a hybrid TLBO with global and local strategies (HTLBO) has been proposed to search the optimal geometric dimensions of the BLDC motor and electromagnetic actuators. This newly proposed algorithm has the advantage of simple concept and easy implementation. The HTLBO is shown to be more likely to find better solutions by using more guides in the teacher phase and more comprehensive local search strategy in the learner phase. The effectiveness of HTLBO is validated on nine unconstrained functions and two typical nonlinear constrained functions with integer variables, and simulation results confirm that the HTLBO is able to yield better solutions than the basic TLBO and other six common methods. Furthermore, the proposed method is applied to two electromagnetic device design problems in the real world including the BLDC motor and the electromagnetic actuator, experimental simulations testify that HTLBO can generate the best results. It also reveals that in contrast with reported results and other methods, the HTLBO performs more efficiently. In summary, the proposed HTLBO is demonstrated to be a potential effective method for optimal design of BLDC motors and electromagnetic actuators, and it is also a promising alternative for the optimization of other mixed integer nonlinear constrained electromagnetic problems. Although the HTLBO has shown excellent performance in optimal design of BLDC motors and electromagnetic actuator geometric constructions, it may be not very powerful when solving large scale optimization problems. Therefore, to further improve its performance for solving complex large scale discrete optimization problems will be a future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China No. 61773252 and 52077213; and Natural Science Foundation of Guangdong No. 2018A030310671.