
Abstract
This article attempts to investigate the reliability measures of a repairable system with
Introduction
System reliability is an important concern in repairable systems, and it has been extensively investigated for applications in power plants, manufacturing systems, and industrial systems. This article focuses on reliability measures for a repairable system with standby units, geometric reneging, and threshold-based recovery policy. Threshold-based recovery policy was introduced by Efrosini and Semenova 1 and further discussed by Efrosini and Winkler 2 in the analysis of an M/M/1 retrial queue with constant retrial rate and unreliable server. Purohit et al. 3 utilized the Runge–Kutta method to compute the steady-state probabilities of an M/M/1 retrial queue with constant retrial policy, an unreliable server, threshold-based recovery, and state-dependent arrival rates. A cost analysis of a repairable M/M/1/N queueing system under a threshold-based recovery policy is conducted by Yang et al. 4 Recently, Yang and Chiang 5 dealt with a machine repair problem under a threshold-based recovery policy. They employed the particle swarm optimization algorithm to solve the cost optimization problem.
Considerable research has focused on repairable systems from the perspective of queueing; however, few studies have approached the problem from the perspective of reliability. Cao and Cheng 6 were the pioneers to incorporate the reliability concepts in the queueing systems. They investigated an M/G/1 queueing system with a repairable service station, where the lifetime and repair time of the service station are exponential and general distributions, respectively. Wang and Sivazlian 7 investigated the reliability characteristics of a repairable system with warm standbys and multi-repairmen. Later, Ke and Wang 8 extended the model of Wang and Sivazlian 7 to cases involving balking and reneging. Wang and Kuo 9 analyzed the reliability and availability characteristics of four different series system configurations with cold and warm standbys. Jain et al. 10 used the Laplace transform technique to obtain the reliability function and mean time to system failure (MTTF) of a machine repair system with spares and reneging, where the repairman operates the N-policy. Using the same technique, Ke et al. 11 discussed the reliability measures of a repairable system with standby switching failures and reboot delay. Wang et al. 12 carried out a comparison study of the reliability and availability in four different system configurations with warm standby components and standby switching failures. Lee et al. 13 employed a Bayesian method, using different prior distributions of the system parameters, to study a redundant repairable system with standby imperfect switching and reboot delay. Ke et al. 14 studied the reliability analysis of a repairable system with standby switching failures and reboot delay. Recently, Wang et al. 15 examined a repairable system with imperfect coverage under service pressure condition. They conducted a sensitivity analysis of the reliability characteristics to describe the impact of system parameters on the reliability characteristics.
Queueing models are generally investigated under the assumption of a reliable server. However, in most practical cases, servers are subject to breakdowns, making queueing systems with server breakdowns a topic worthy of further consideration. A comprehensive review of research on this topic is found in Krishnamoorthy et al. 16 From the perspective of reliability, Li et al. 17 discussed the reliability measures of the M/G/1 queue with Bernoulli vacation and server breakdowns. Li et al. 18 considered the PH/PH/1 queueing system with server breakdown and repair, in which the lifetime and repair time of the server are exponential and phase type distributions, respectively. In their work, they showed that the proposed reliability approximation can be applied to various Markovian queueing systems with server breakdowns. Using the supplementary variable method, Wang et al. 19 obtained explicit expressions for the availability, frequency of failure, and reliability function of the server for the retrial queues with server breakdowns and repairs. Wang et al. 20 applied the Laplace transform technique to develop the reliability function and MTTF of a system with warm standbys and a repairable service station. Wang et al. 21 applied the same technique to examine the reliability characteristics of a repairable system with warm standby units and multiple unreliable service stations. Later, Ke et al. 22 expanded upon this work with the inclusion of imperfect switching mechanisms. Lin et al. 23 constructed the membership functions of the reliability and availability characteristics of a repairable system with one primary machine, one standby machine, and an unreliable service station.
Dimou et al. 24 considered a single vacation queueing model with geometric reneging, in which customers become impatient during the absence of the server. They applied a generating function approach to derive the equilibrium distribution for the number of customers in the system. In a recent work by Dimou and Economou, 25 the generating function approach was applied in the analysis of single-server queues with catastrophes and geometric reneging. To the best of our knowledge, only little attention was paid to queueing models with geometric reneging. We therefore consider a Markovian repairable system with geometric reneging and threshold-based recovery policy from the perspective of reliability. The purpose of this article is threefold: (1) to develop the reliability measures of the repairable system with standbys, geometric reneging, and threshold-based recovery policy; (2) to examine the impact of system parameters on the reliability measures using numerical experiments; and (3) to present an application example for illustrating the potential applicability of the reliability model.
The model
We consider a reliability model with
When the repairman is maintaining the failed units, he is subject to breakdowns and repairs. If the repairman breaks down, he operates the threshold-based recovery policy. This means that the breakdown repairman cannot be repaired until the number of failed units in the system reaches to a specified threshold value
The system failure is defined to be less than
Reliability measures
In this section, we develop the reliability function of the repairable system with standbys, geometric reneging, and threshold-based recovery policy. Then, the MTTF is derived by using the reliability function.
Differential-difference equations
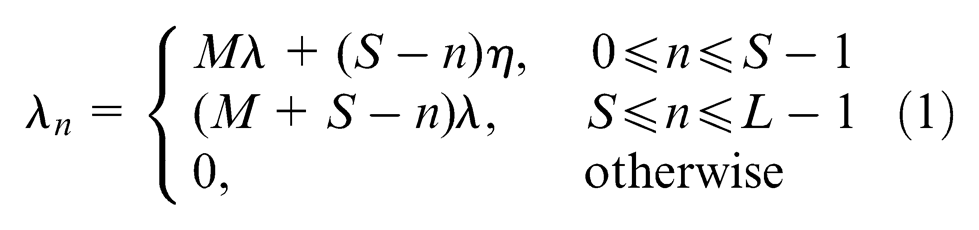
We first define the mean failure rate
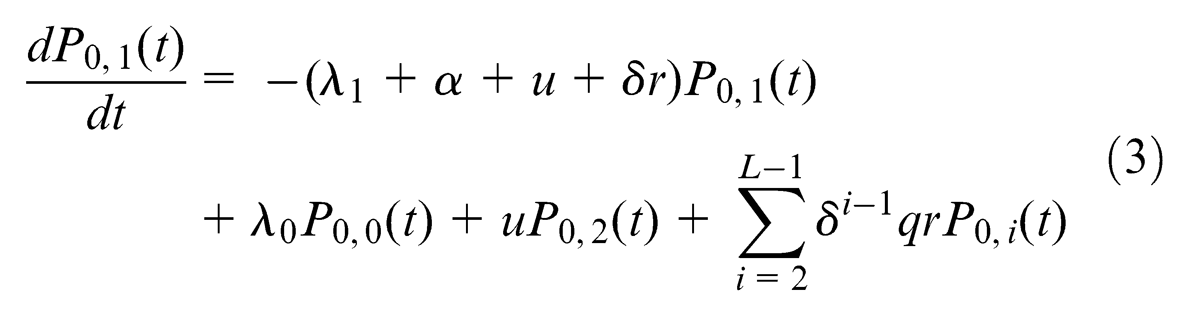
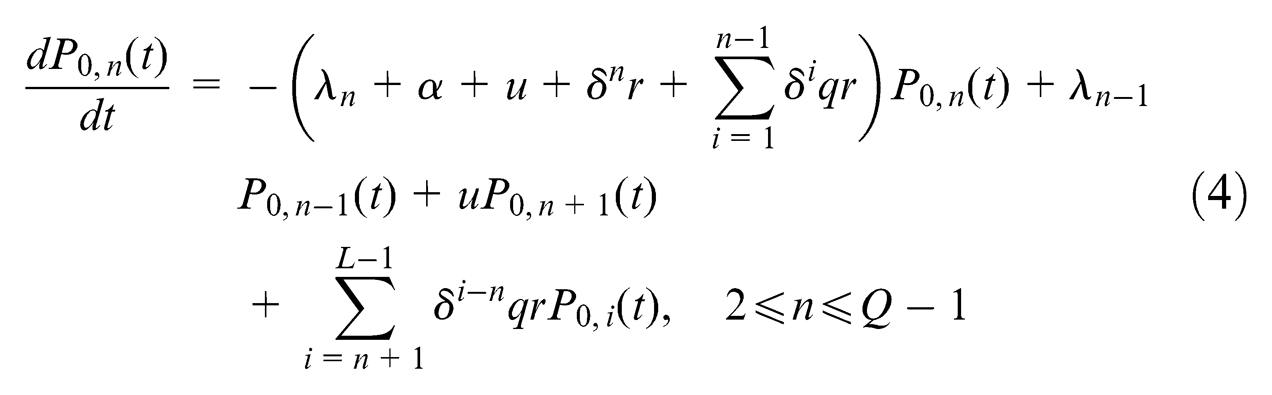
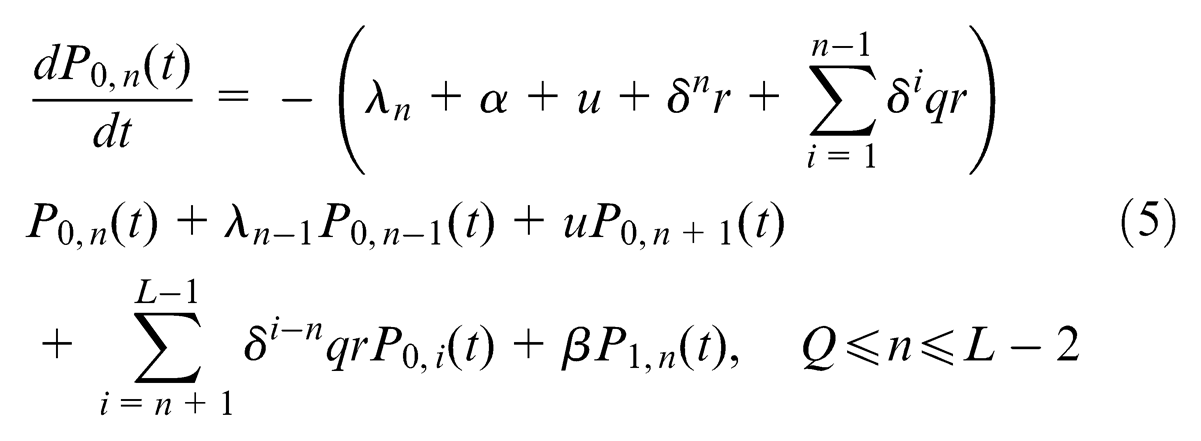
The state-transition-rate diagram for the reliability system with standbys, geometric reneging, and threshold-based recovery policy is shown in Figure 1. Referring to Figure 1, we set the differential-difference equations governing the reliability model as follows


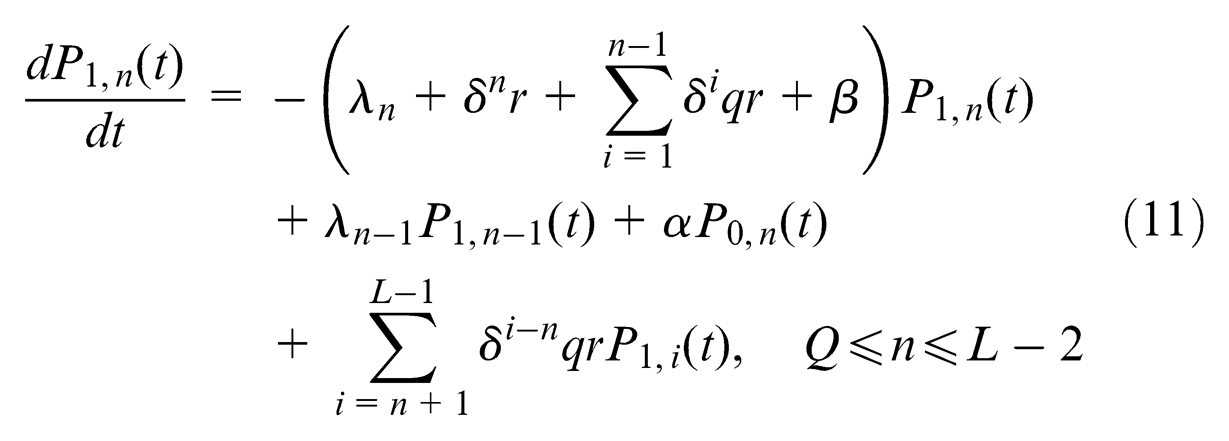
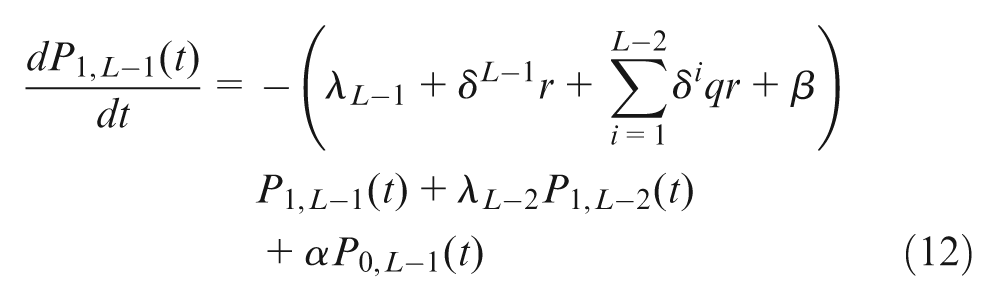
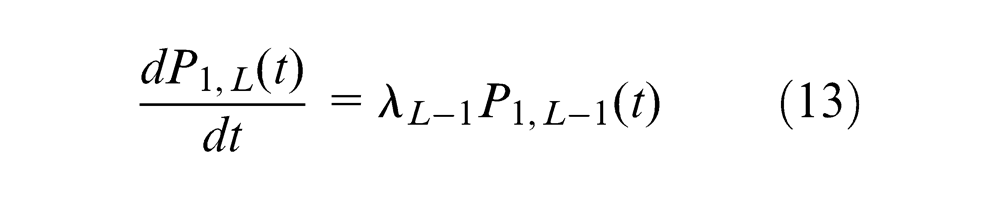
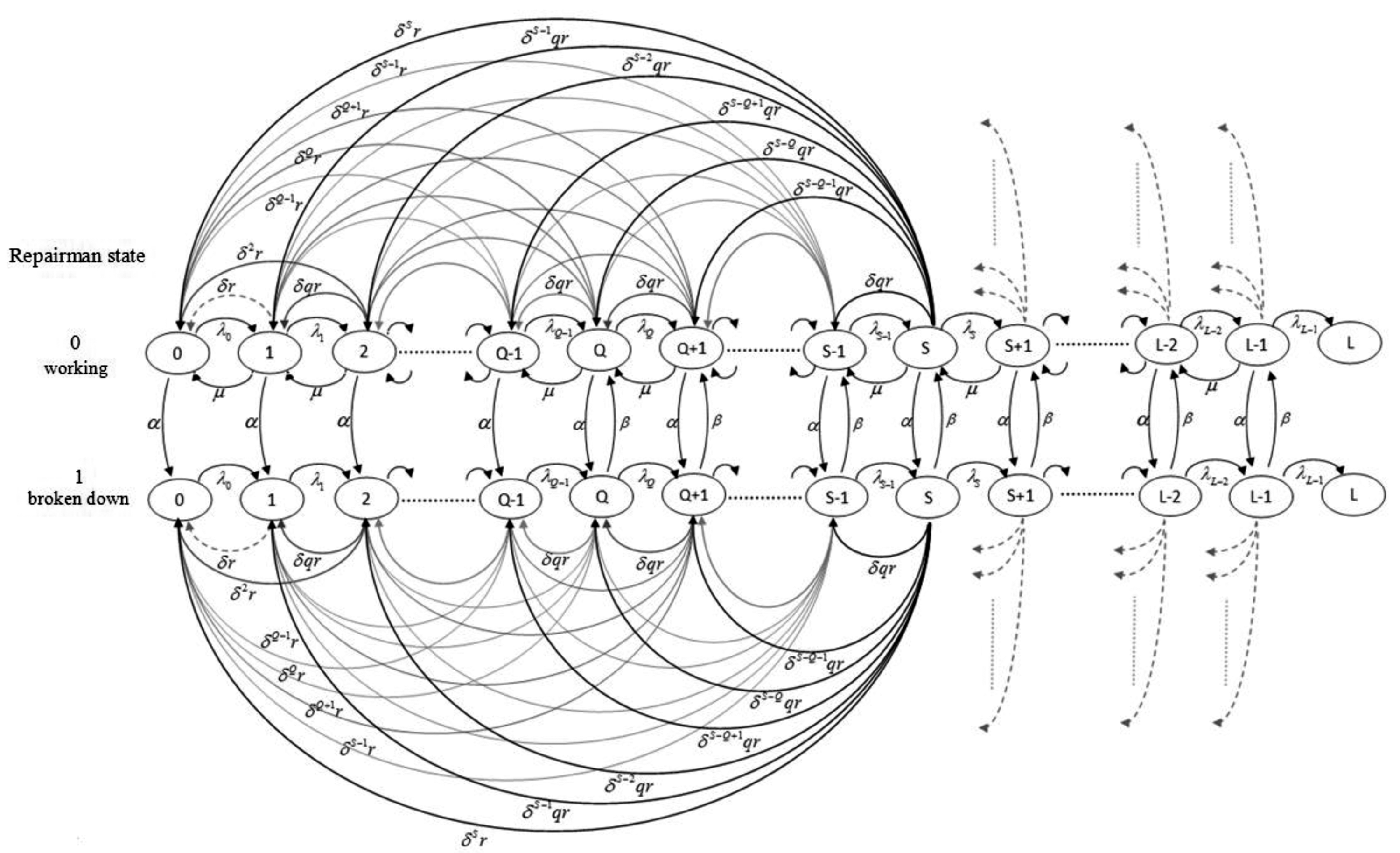
State-transition-rate diagram for the reliability system with standbys, geometric reneging, and threshold-based recovery policy.
Laplace transform equations
The Laplace transform of

Taking the Laplace transform on both sides of equations (2)–(13) and using equation (14), we obtain




Equations (15)–(24) can be written in matrix form as
where
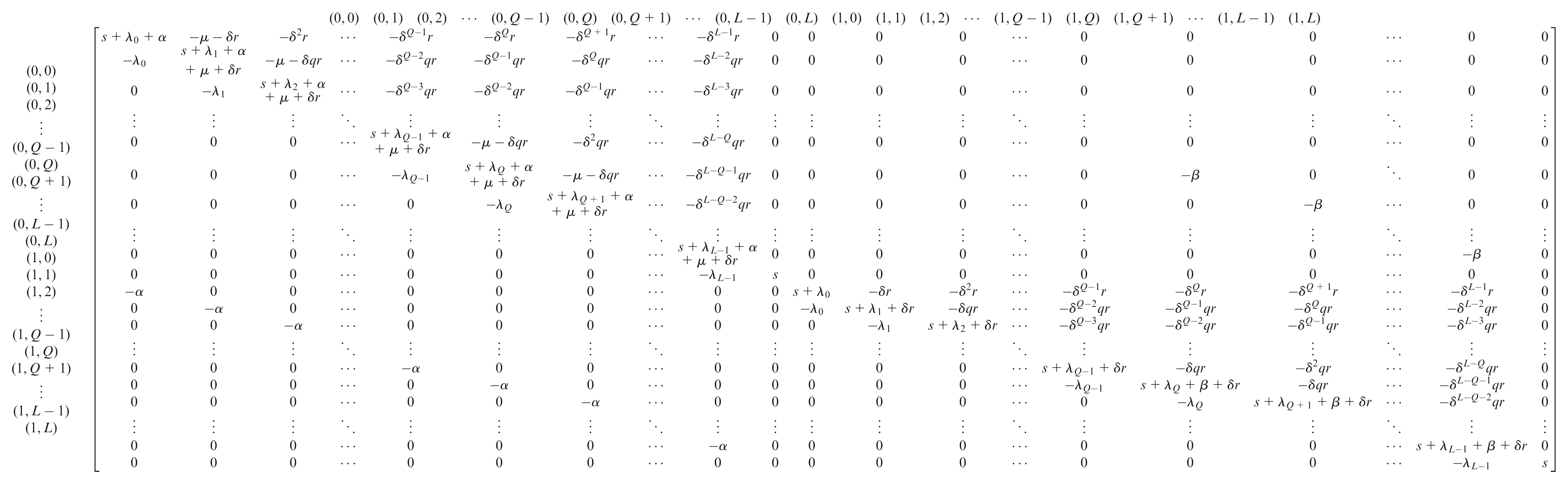
is a
Using Cramer’s rule to solve equation (25),
and
where
Special case
Let
Reliability function and MTTF
Let
where
The MTTF is defined as
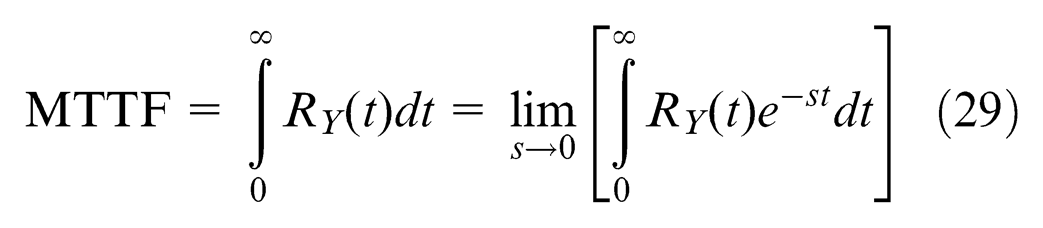
Substitution of equation (28) into equation (29) and after some algebraic manipulations, it yields
Numerical results
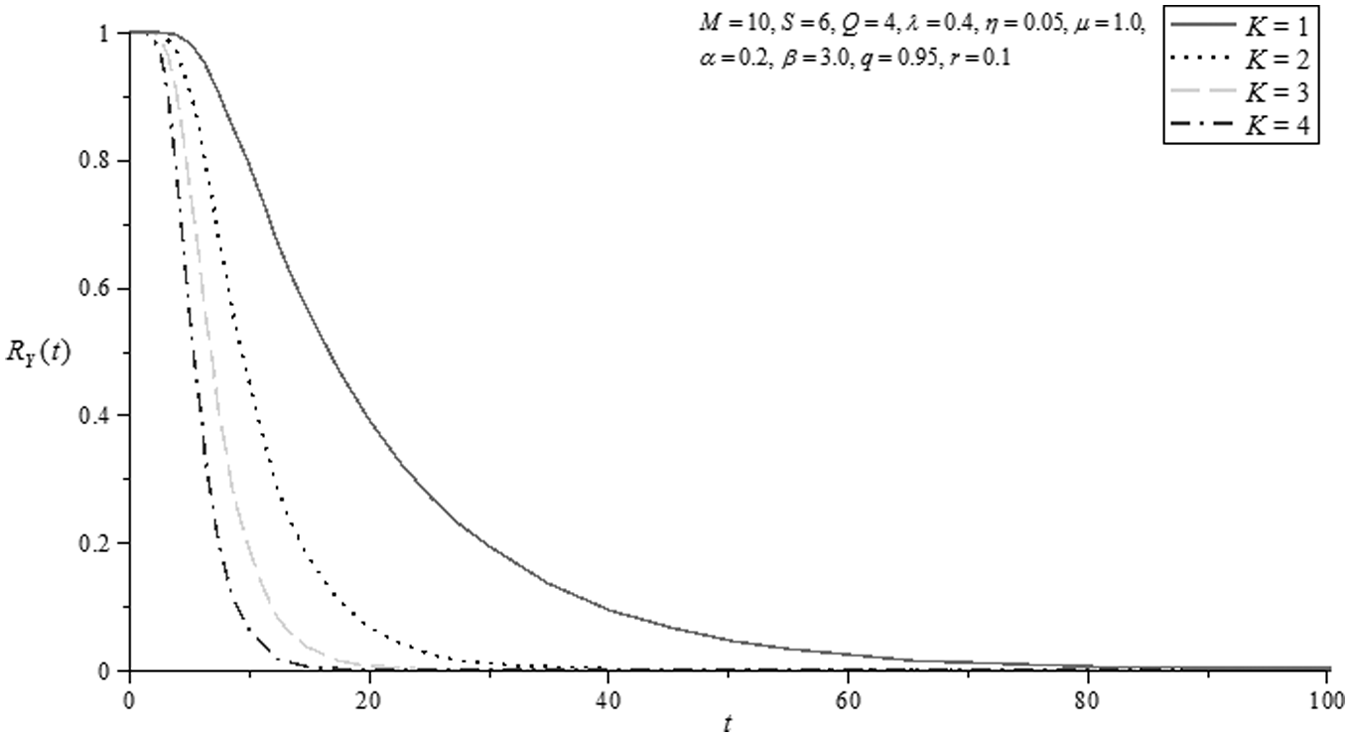
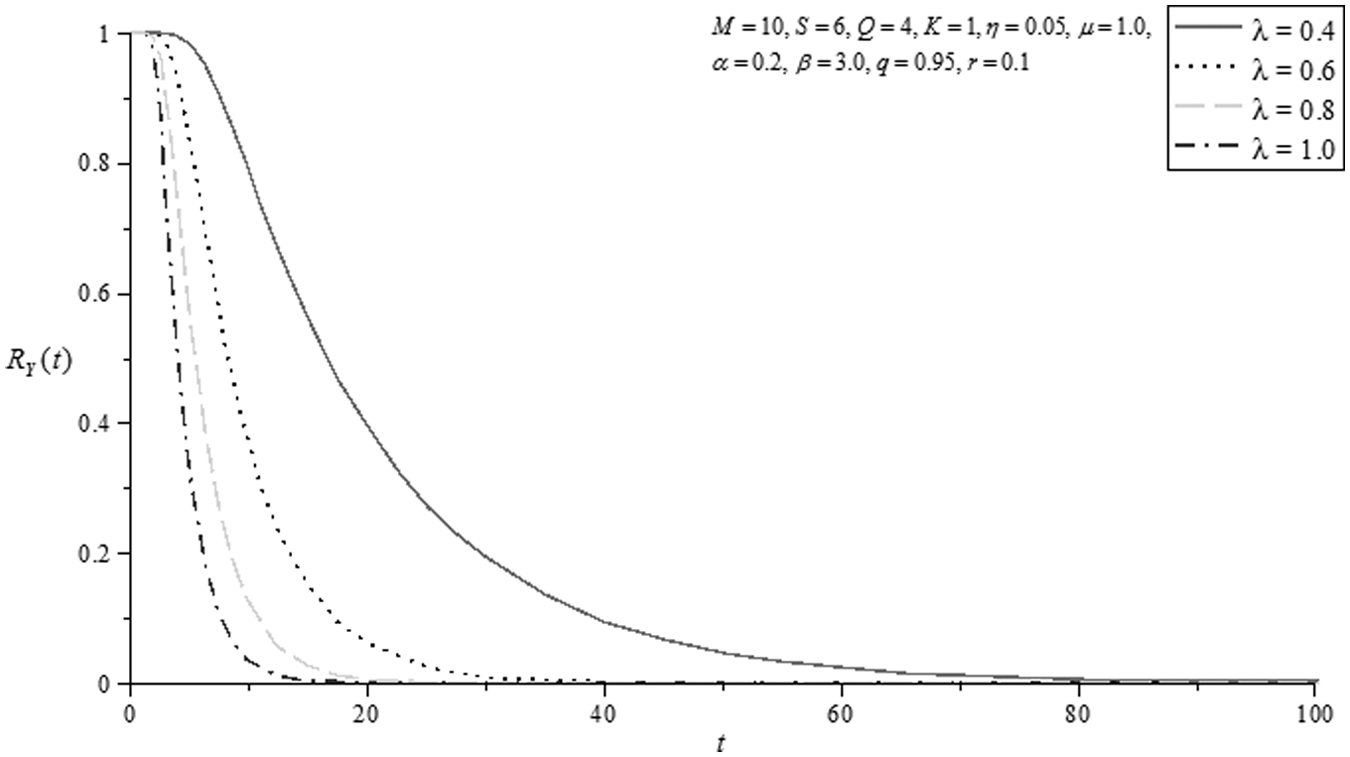
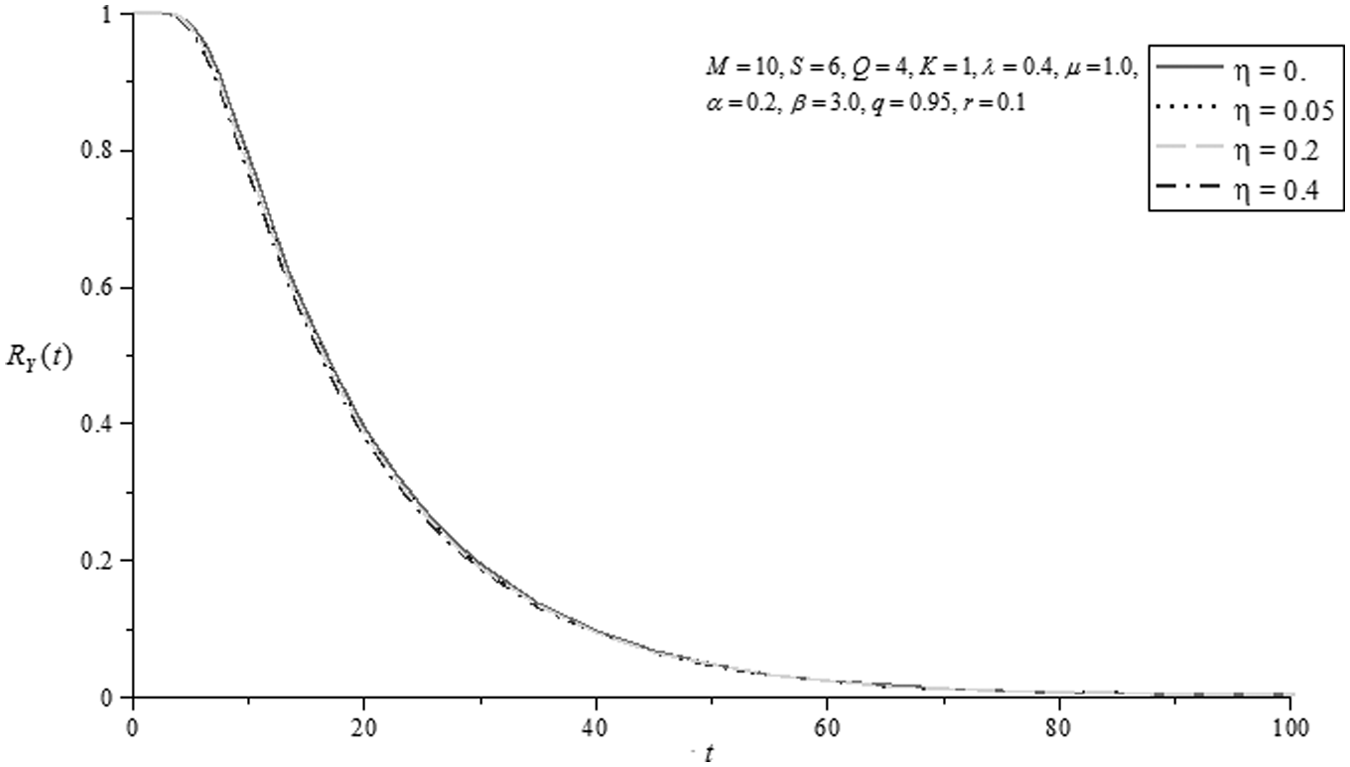
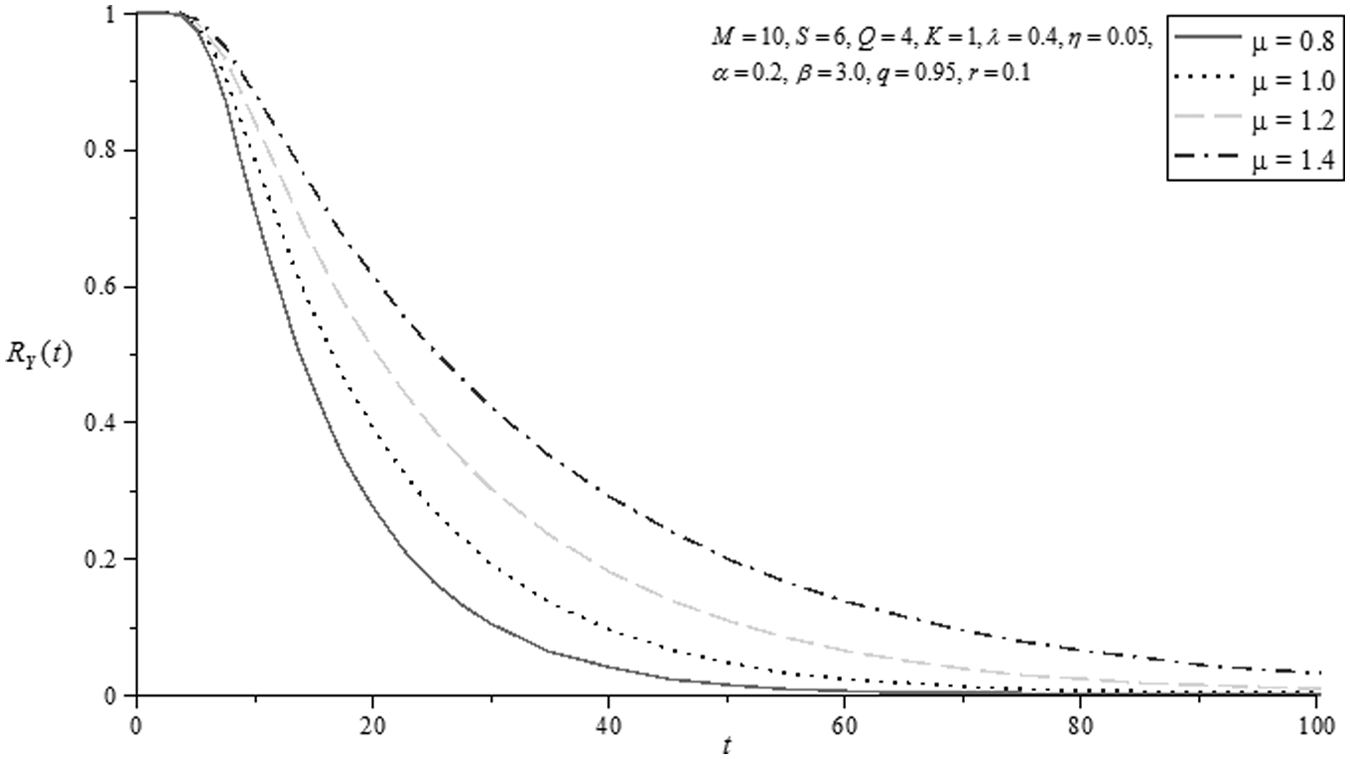
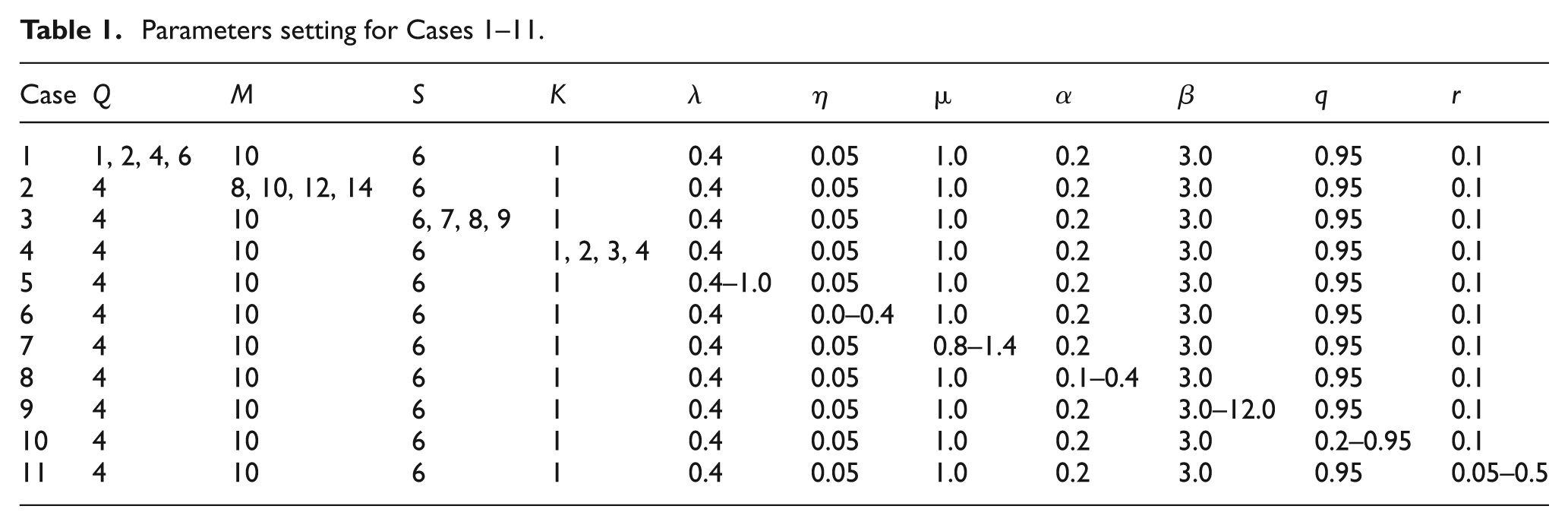
This section presents extensive numerical results to study the impact of various system parameters on
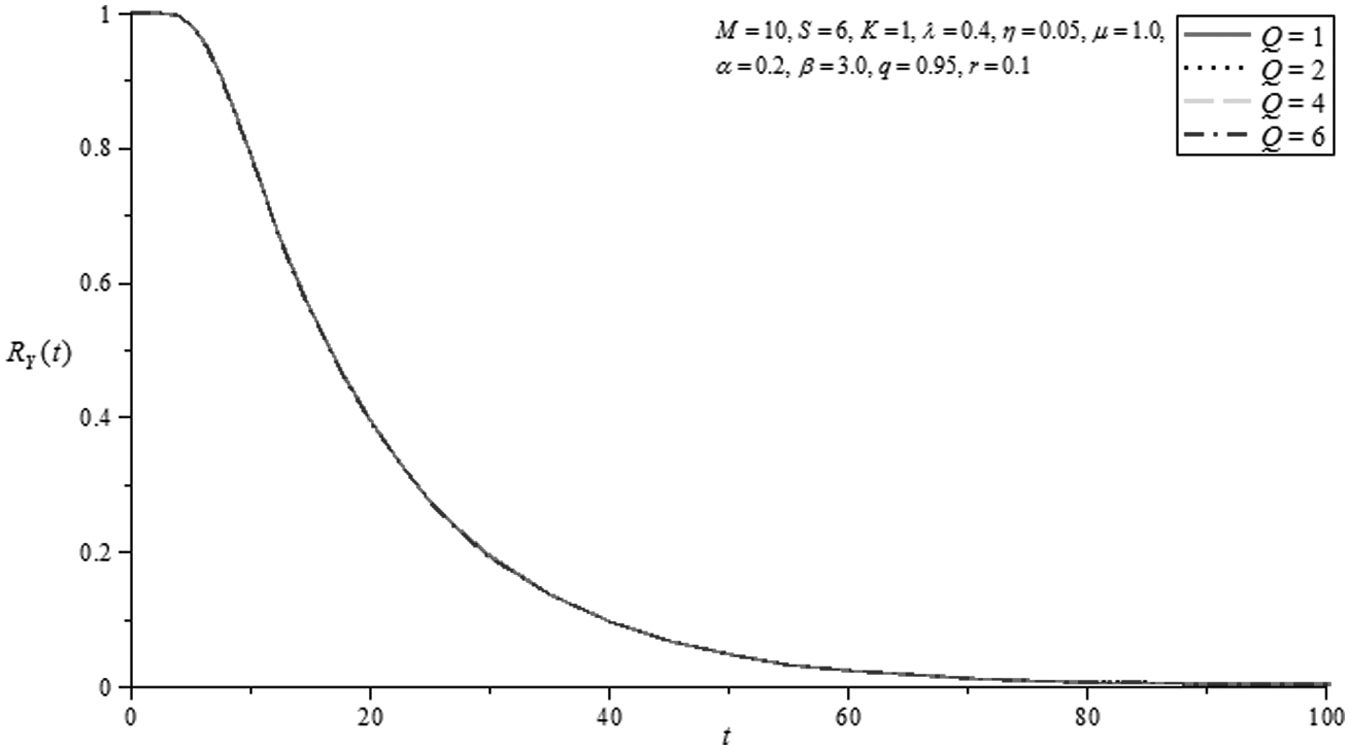
The system reliability with different threshold values of
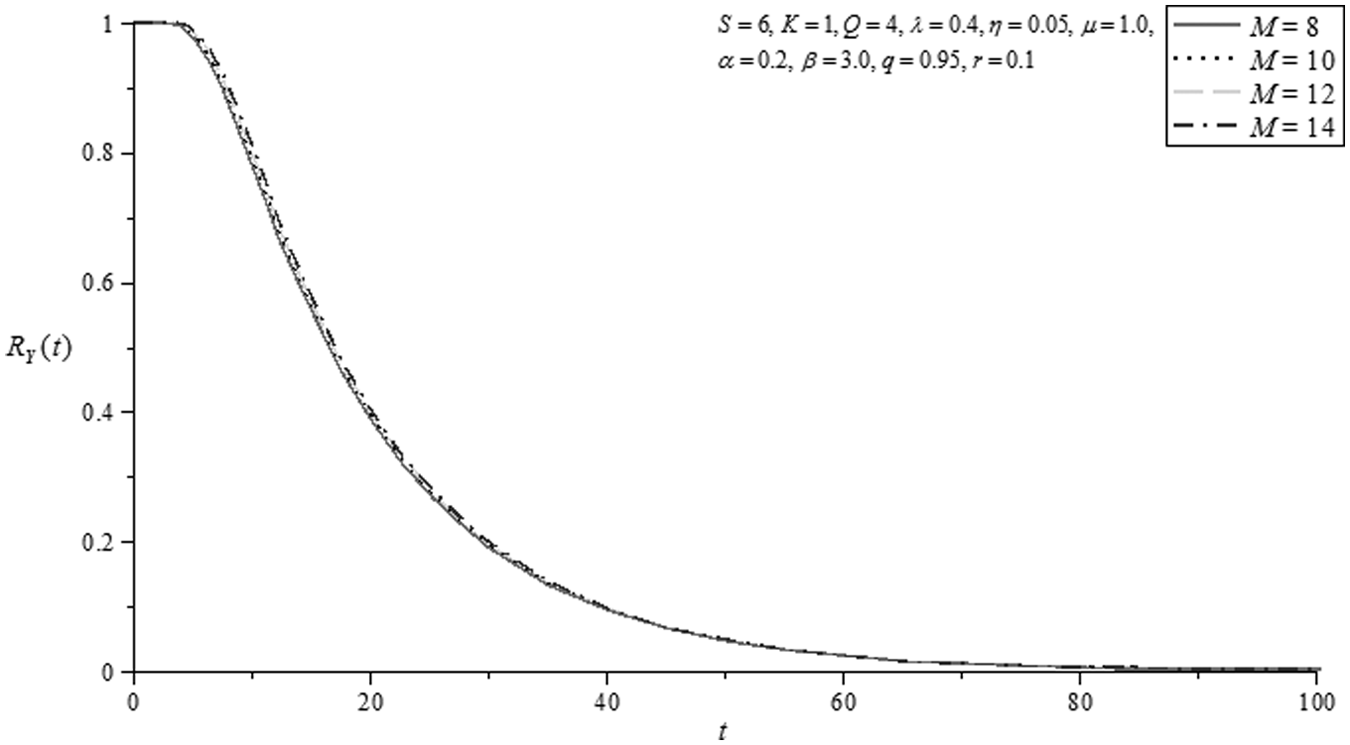
The system reliability with different number of operating units (Case 2).
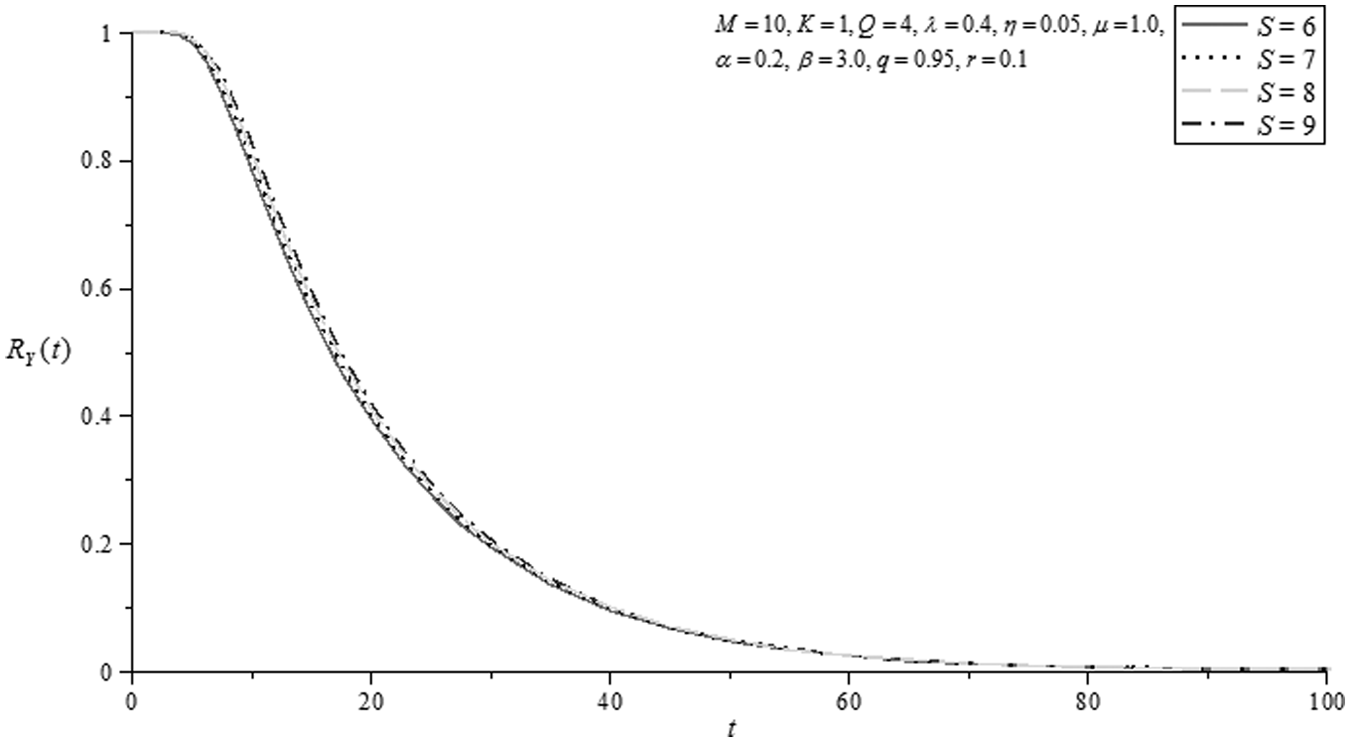
The system reliability with different number of standby units (Case 3).
The system reliability with different values of
The system reliability with different values of
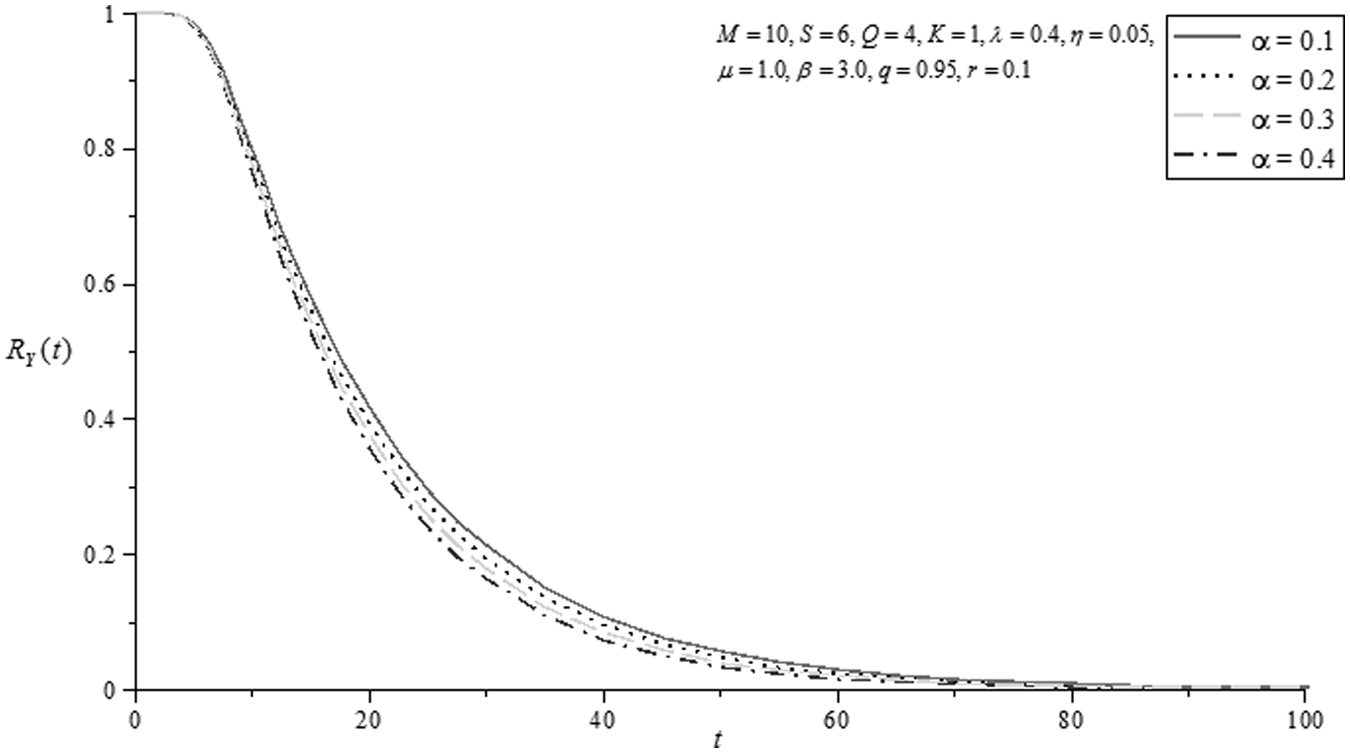
The system reliability with different values of
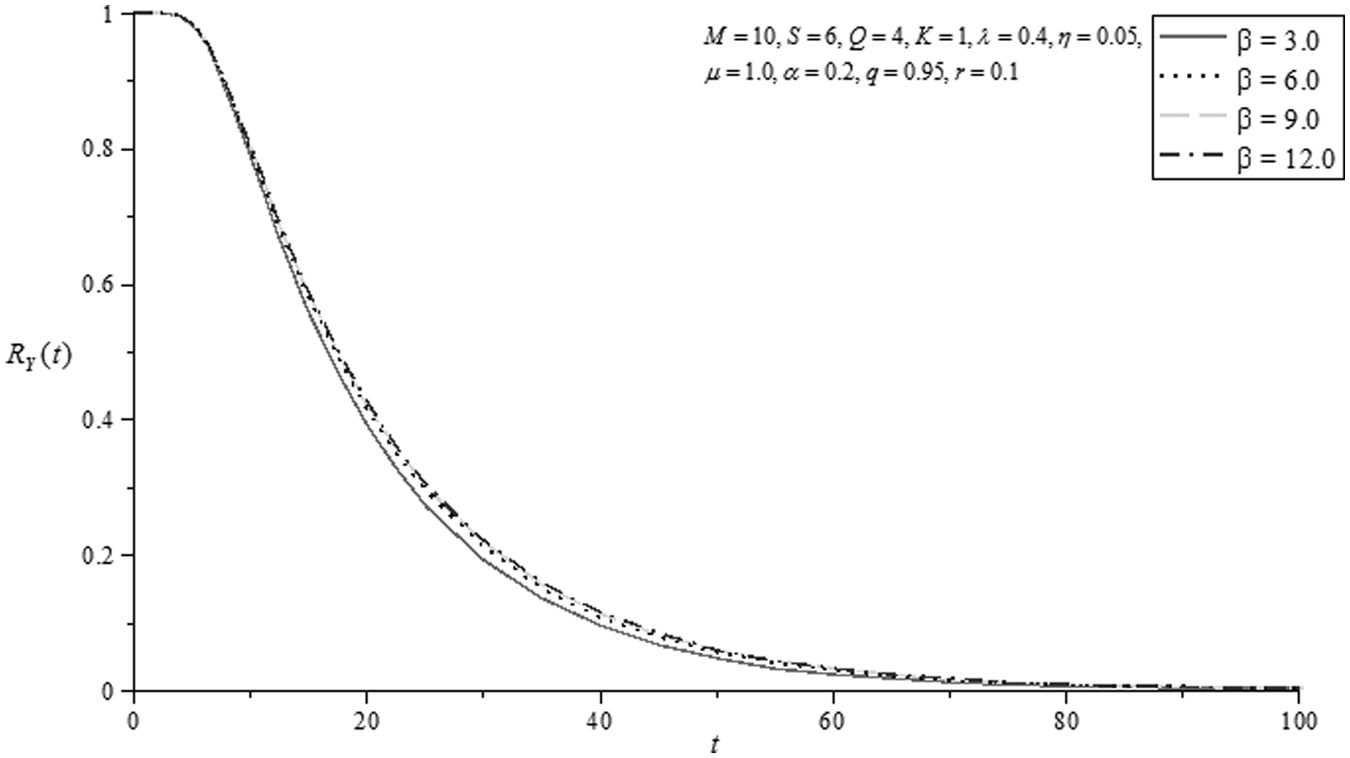
The system reliability with different values of
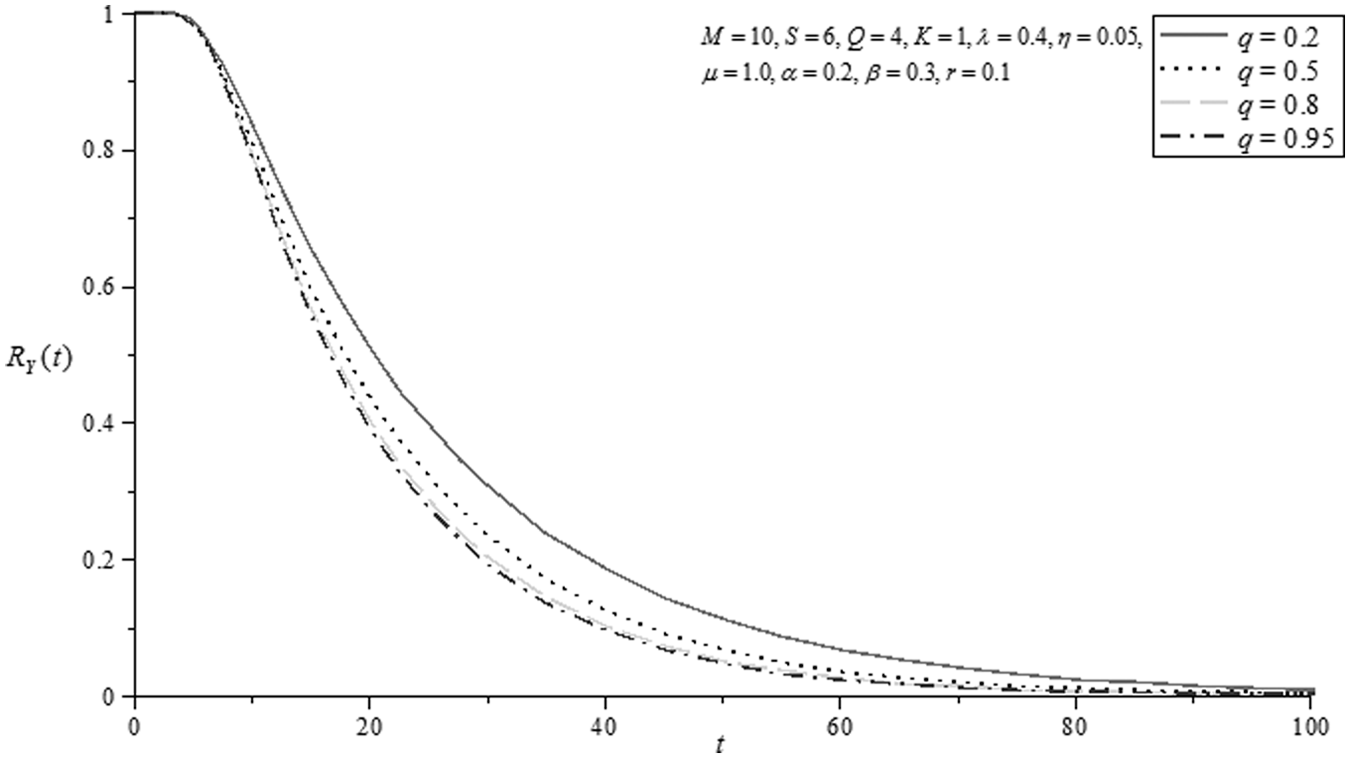
The system reliability with different values of
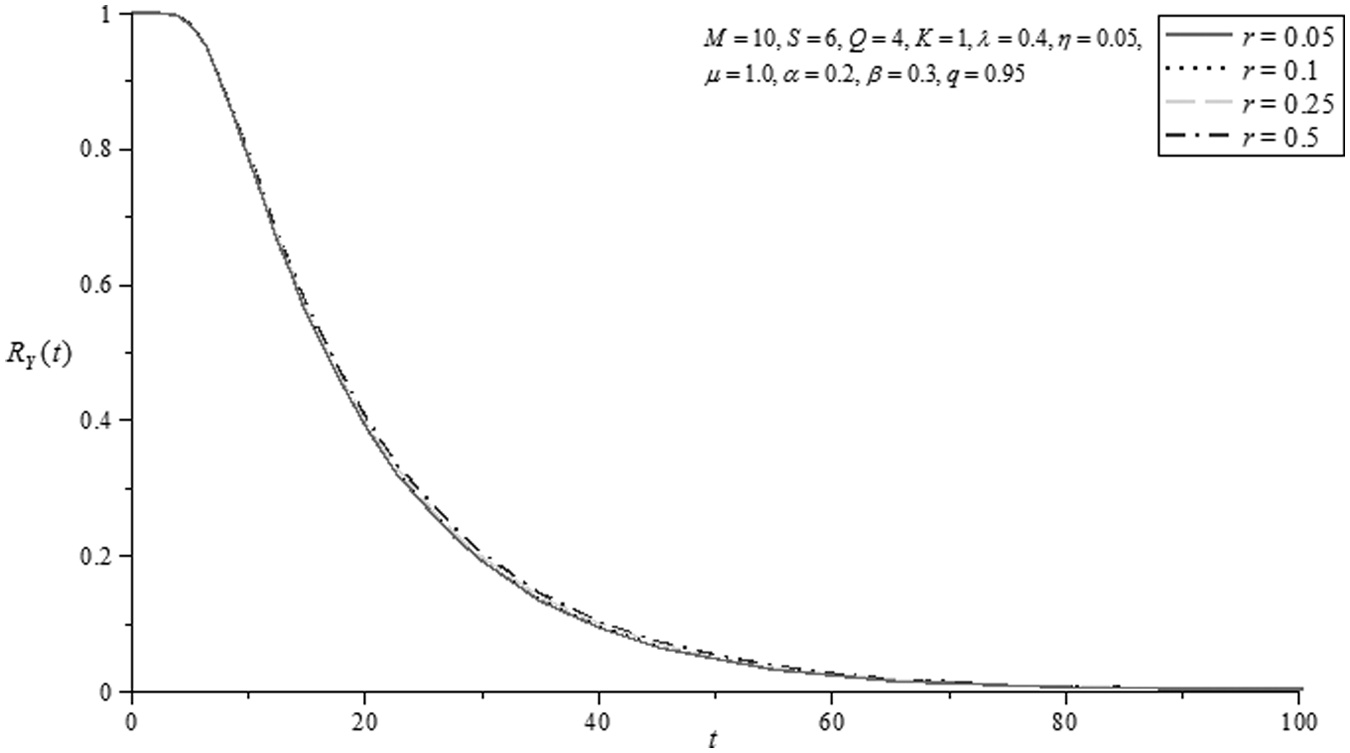
The system reliability with different values of
The system reliability with different values of
The system reliability with different values of
Parameters setting for Cases 1–11.
It is apparent from Figure 2 that the threshold value
In order to examine the impact of the system parameters on the behavior of the system reliability, Figure 13 exhibits the sensitivity analysis of the system reliability with respect to
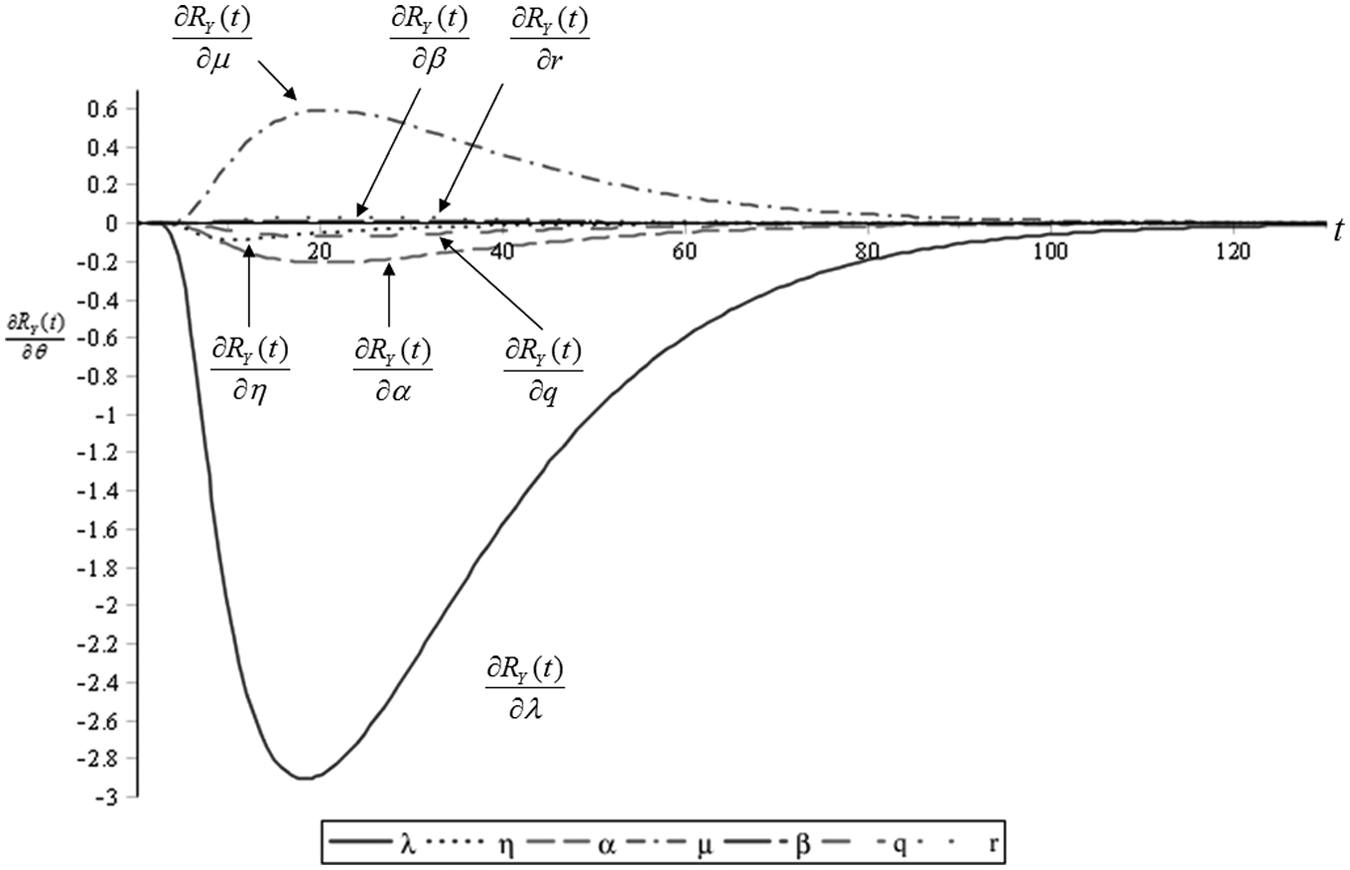
The sensitivity analysis of system parameters on the system reliability.
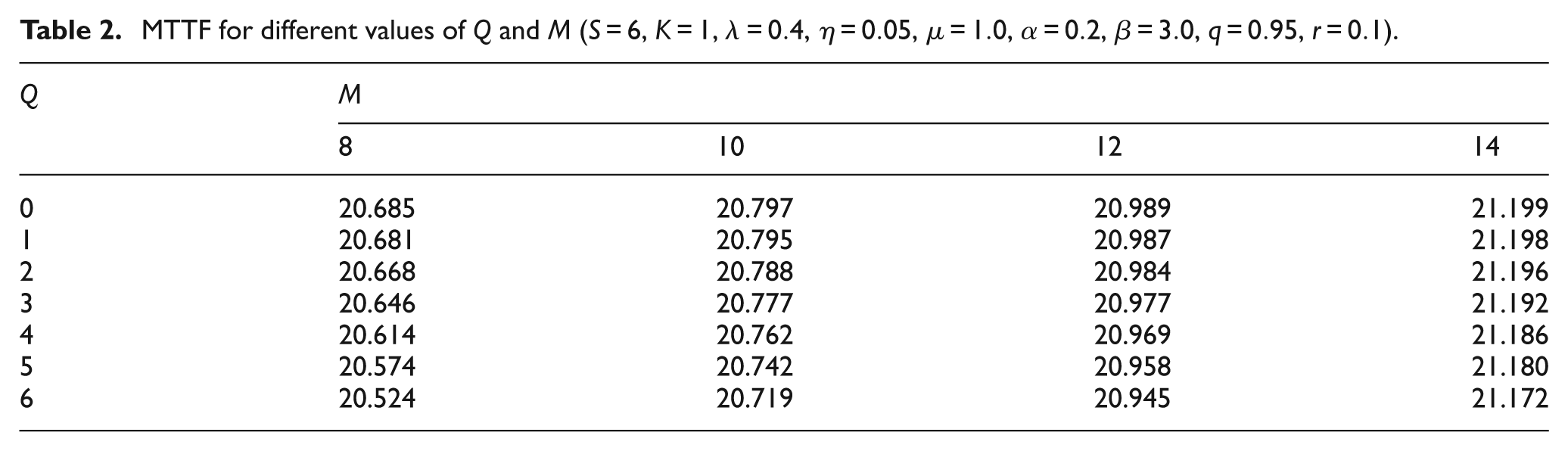
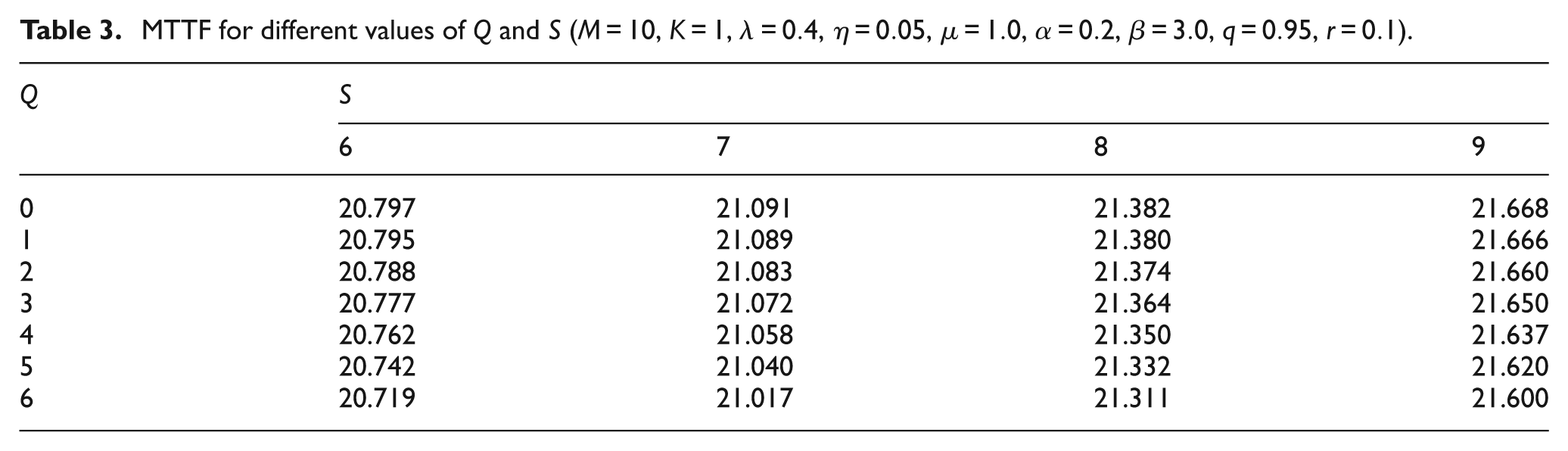
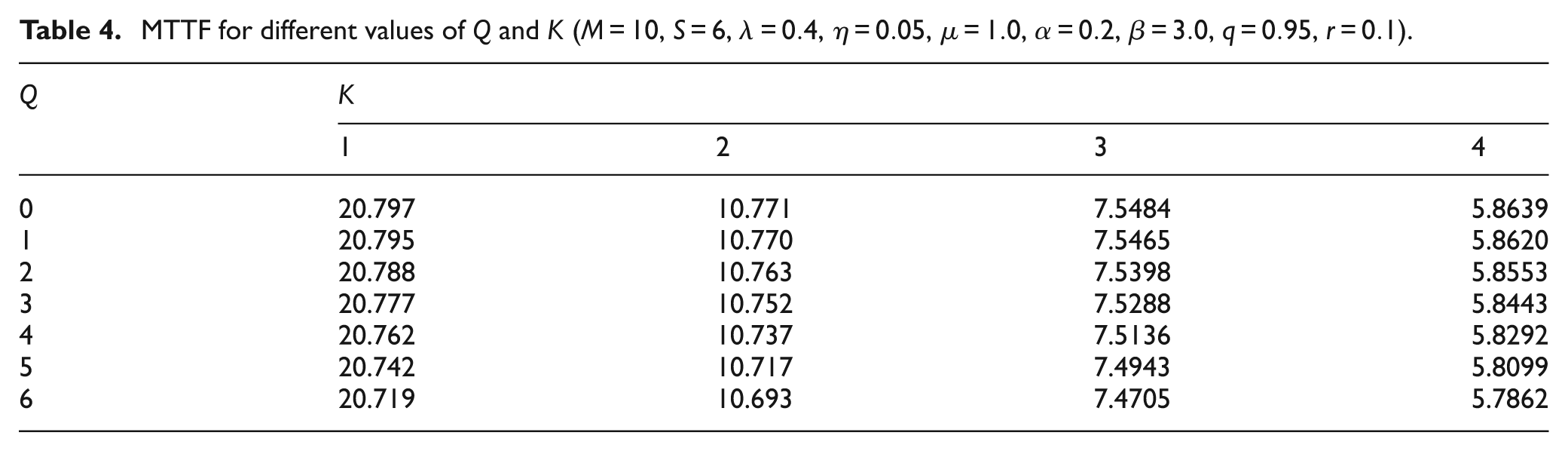
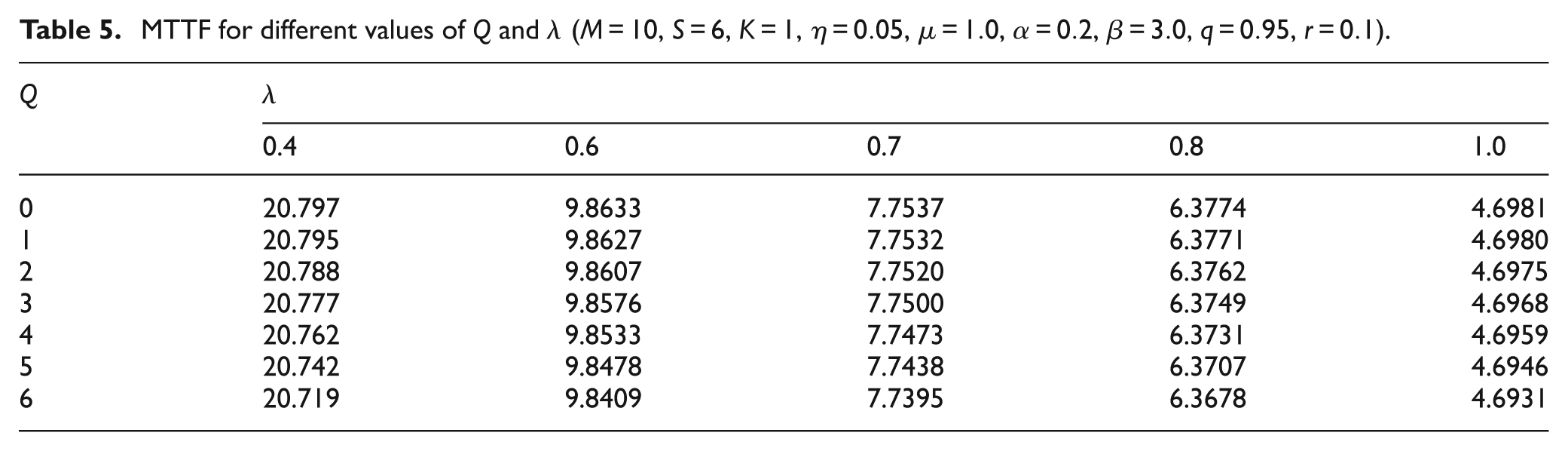
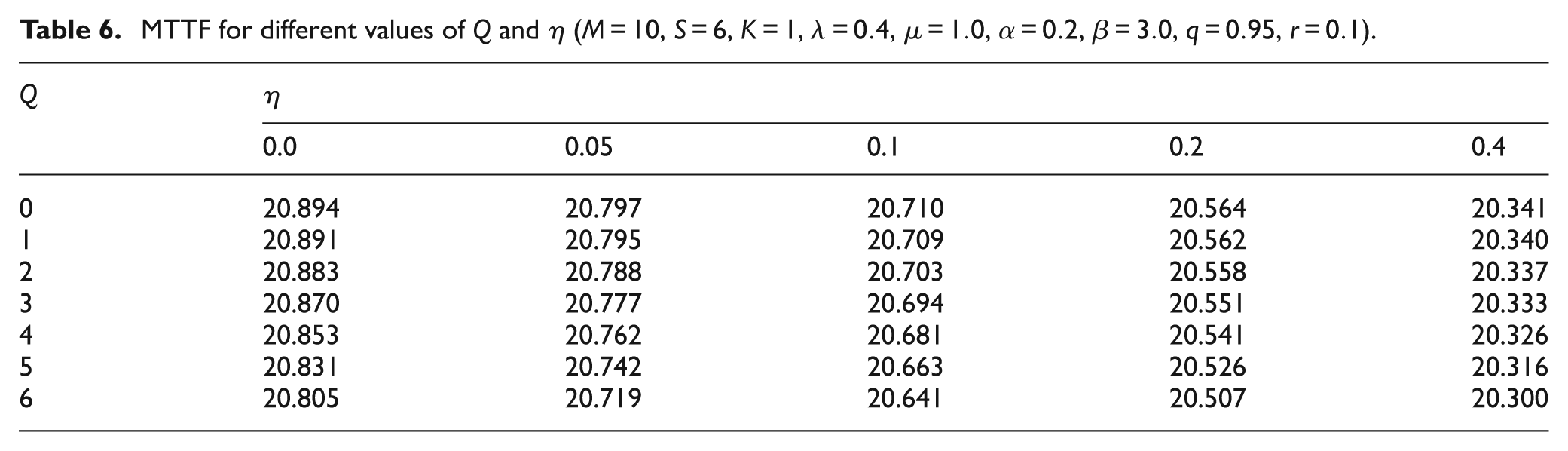
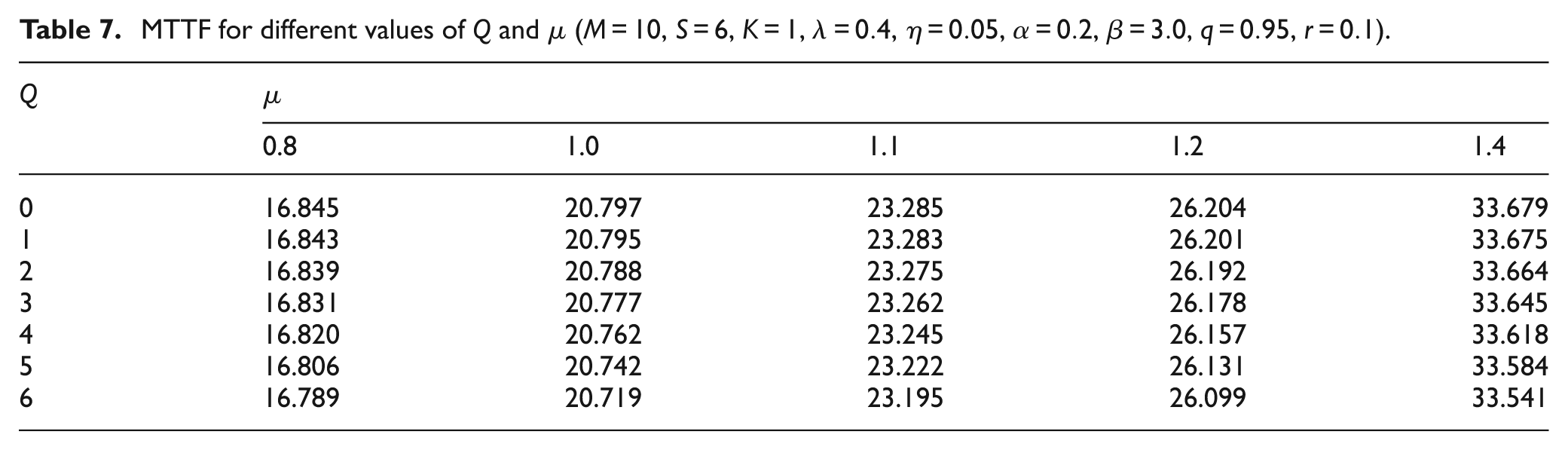
Next, we investigate the impact of various combinations of the threshold value
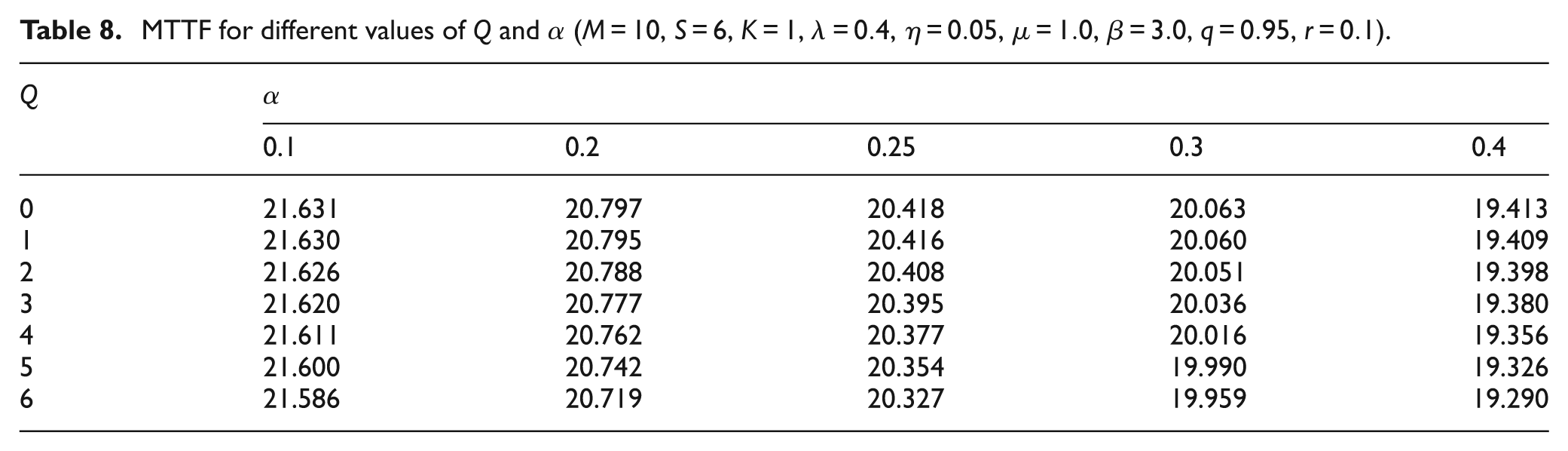
MTTF for different values of
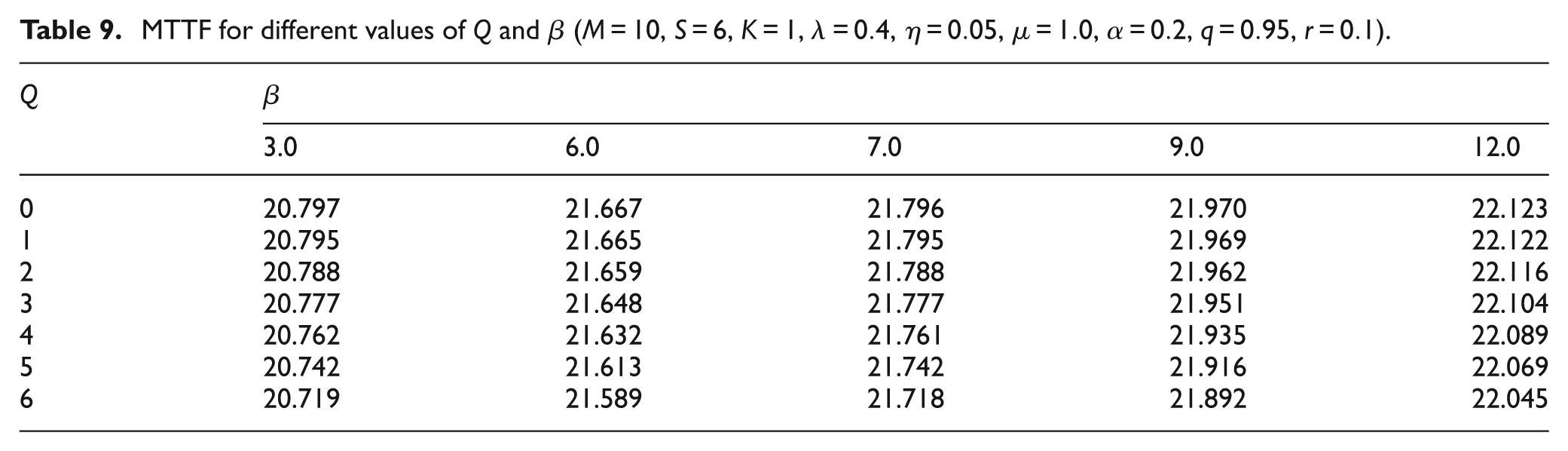
MTTF for different values of
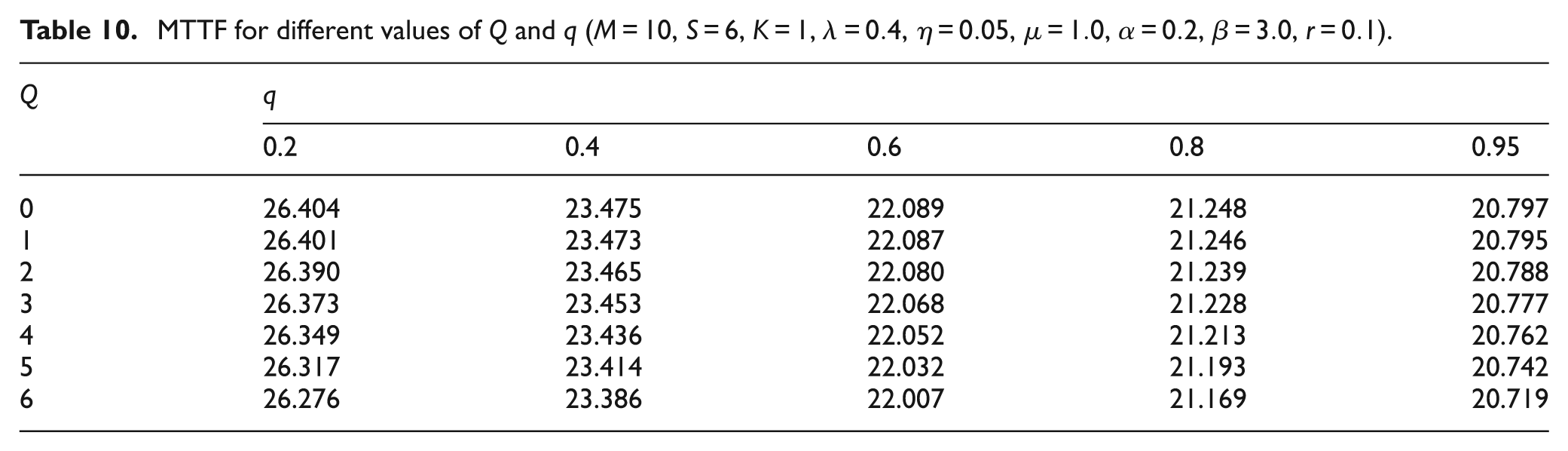
MTTF for different values of
MTTF for different values of
MTTF for different values of
MTTF for different values of
MTTF for different values of
MTTF for different values of
MTTF for different values of
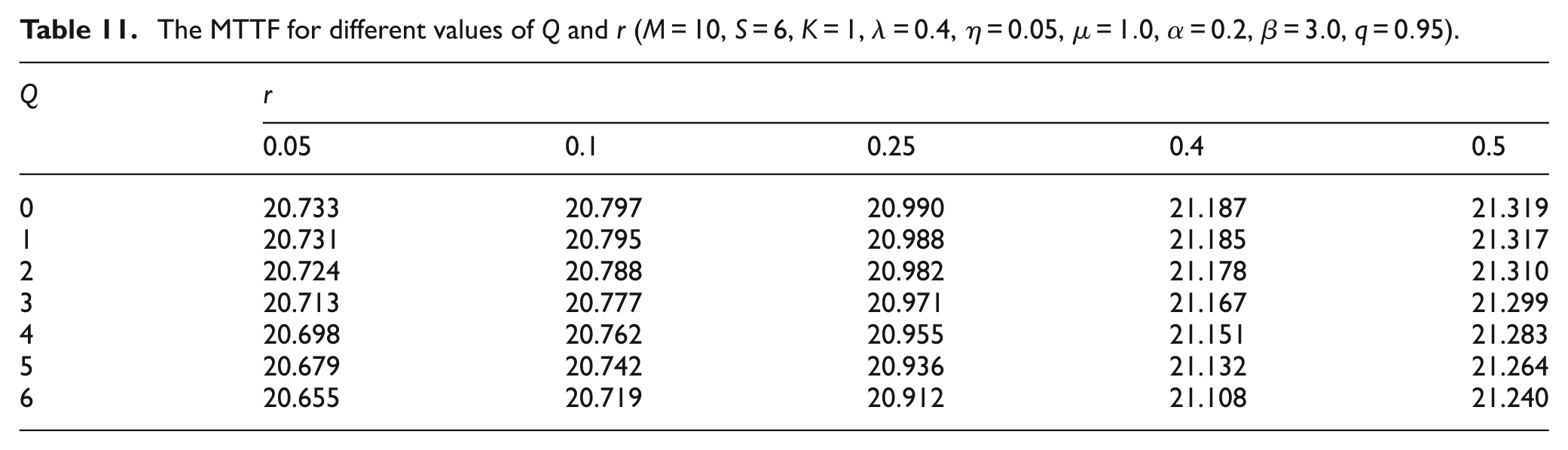
The MTTF for different values of
Sensitivity analysis for the MTTF (

An application example
To illustrate the applicability of the proposed reliability model to real-world systems, we consider an electric power system consisting of eight primary generators and six standby generators. The system distributes electric power and maintains sufficient power to meet the requirements of its customers. When a primary generator fails, it is immediately replaced by an available standby generator. The system is considered to have failed when all generators (primary and standby) fail. The time-to-failure of the primary and standby generators follow exponential distributions with rates
Reliability is an important aspect of performance assessment for electric power systems, making reliability measures an essential tool. Equations (28) and (30) are used to compute system reliability and MTTF with the aid of Maple software, respectively. The reliability function is then plotted with respect to time (Figure 14). From this figure, it can be observed that (1) system reliability decreases by approximately 50% as time increases from 0 to 10 h and (2) if
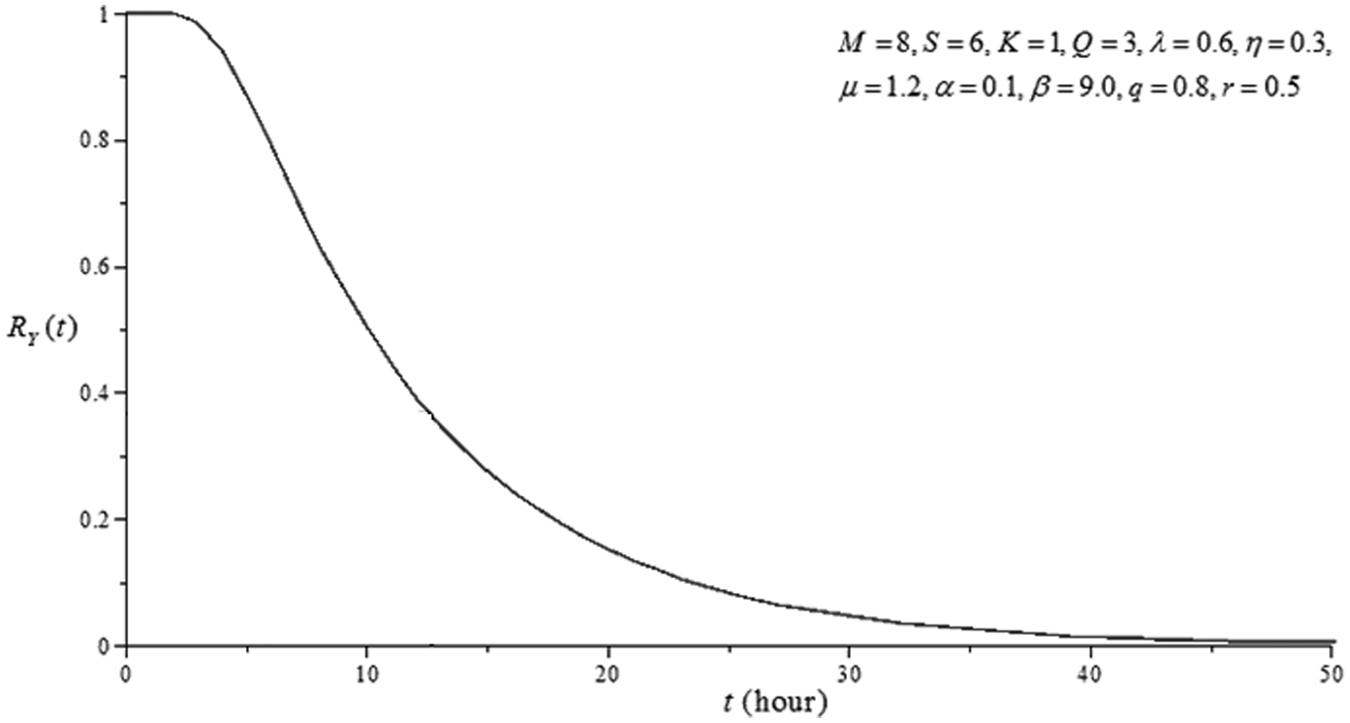
System reliability of the electric power system with respect to
Conclusion
In this article, we investigated a repairable system with standby units, geometric reneging, and threshold-based recovery policy. We first presented the differential-difference equations of the reliability model. Then, the Laplace transform and matrix methods were used to obtain the reliability function and MTTF. Numerical results were given to study the impact of various system parameters on the system reliability and MTTF. It showed that
Footnotes
Appendix 1
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This work was partially supported by the National Science Council of Taiwan (NSC 102-2221-E-141-003-).