
Abstract
This article proposes a novel artificial ecological niche optimization algorithm for car sequencing problem considering energy consumption to satisfy the requirements of the paint shop and the assembly line. Energy consumption, which is an important issue, is often neglected during the production process. In this article, the mathematical model of car sequencing problem with energy consumption is established. A new artificial ecological niche optimization algorithm that imitates natural ecosystem is proposed to solve this problem. The car sequence is considered as an ecosystem. Ecological niche theory, niche overlap and niche differentiation principles are applied in this algorithm, which leads the ecosystem to adapt itself to a more ecological balance condition accompanying less violence appear in the car sequence. Energy consumption in the scheduling process of ring sorting buffer was considered as biogenic migration in the algorithm. The proposed algorithm is verified on a set of instances provided by the French car manufacturer Renault. The computation results indicate the effectiveness of the proposed algorithm.
Keywords
Introduction
Currently, energy consumption has become an important issue and because of global warming and energy prices, more and more automobile manufacturers start to be concerned about low-carbon manufacturing. Due to the individual demands from customers, mixed-model production in the automobile manufacturing shop is inevitable to increase the energy consumption. A modern car manufacturer is usually composed of three major workshops: body shop, paint shop and assembly line. Car sequencing problem (CSP) focuses on the requirements of the paint shop and assembly line. The paint shop has to minimize the consumption of paint solvent, and the assembly line has to smooth the workload. 1 It was described by Parrello et al. 2 as a case of job-shop scheduling in 1986; in order to let the cars produce on a single assembly line homogenous, the line is designed to handle a predetermined ratio of cars with that option to cars without that option. Kis 3 proved that the CSP is nondeterministic polynomial-time hard (NP-hard) in the strong sense and Gent 4 also showed that the decision problem associated with the CSP whether there exists an optimal solution without any violations of the constraints defined by the assembly line is NP-hard. It was often described as a simplified approach of mixed-model sequencing 5 and now become a well-known combinatorial optimization problem faced by car manufacturers. 6 The sequencing problem also widely exists in manufacturing system. Zhao et al. 7 proposed a sequence generation approach that is based on an integrated assembly model to solve assembly sequence planning problems for large-scale assembly. Ab Rashid et al. 8 developed of a tuneable test problem generator for assembly sequence planning and assembly line balancing. Wilson 9 described the philosophy behind the construction of a computer technique that has been used to formulate and solve a set of sequencing problems for efficient use of flexible manufacturing system (FMS).
The approaches that have been proposed for solving CSP can be classified into two types: exact approaches and approximation algorithms. Exact approaches include constraint programming (CP), 10 integer programming, 11 branch and bound algorithm 5 and so on. Approximation algorithms contain greedy approaches, 12 local search (LS) approaches, 13 ant colony optimization (ACO)14,15 and so on. Recently, considerable work has been reported in the field of heuristic approaches to this problem. Cordeau et al. 16 introduced an iterated tabu search (TS) heuristic for the daily CSP. The iterated TS heuristic combines classical TS with perturbation operators that help escape from local optimal. Estellon et al. 13 described two LS approaches for this problem. One approach was based on an original integer linear programming and another one was based on very fast explorations of small neighborhoods. Ribeiro et al. 17 proposed a set of heuristics for approximately solving multi-objective real-life CSP, based on the paradigms of the variable neighborhood search (VNS) and iterated local search (ILS) metaheuristics, to which further intensification and diversification strategies have been added. Morin et al. 15 studied the learning process in an ACO algorithm designed to solve the problem of ordering cars on an assembly line. Solnon et al. 18 made a synthesis of the methods proposed by the candidate teams in the Challenge ROADEF’2005; only two teams used exact approaches at the qualification stage and one team used CP integrated with large neighborhood search (LNS) among the finalist teams; the other methods proposed are heuristic approaches including greedy heuristic (GH), simulated annealing (SA), TS, VNS, LNS, LS, ILS, genetic algorithm (GA) and ACO.
The existing literatures of CSP commonly find the optimal car sequence to minimize the number of color changes in the paint shop and the violations of constraints in the assembly line. However, the industrial sector in China accounted for a significant proportion of its total energy consumption, and the energy consumption in the CSP was often neglected. In practice, a set of cars that need to be sequenced may have different optimal sequences with the same number of color changes and weighted violations, and the energy consumption for these optimal sequences is different. In this article, the mathematical model of the car sequencing problem with energy consumption (CSP-EC) is proposed, and the objective to minimize the energy consumption of the production process is integrated with the traditional CSP. A novel artificial ecological niche optimization (AENO) algorithm, which imitates natural ecosystem, is presented to solve this problem.
The remainder of this article is organized as follows: in section “Problem formulation,” definition of CSP-EC is presented. The ring sorting buffer is used to assist us to study the energy consumption in sorting process. In section “AENO algorithm,” the AENO algorithm was proposed. The basic principle and the detail process of the algorithm are presented. In section “Computation results,” the computational experiments are presented, and the test data of CSP are provided by Renault. Conclusions and future research are given in section “Conclusion.”
Problem formulation
The traditional CSP is proposed by Renault for ROADEF Challenge in 2005. 1 In the paint shop, it is to minimize the consumption of paint solvent. The paint solvent is used to wash spray guns each time when the paint color is changed between two consecutive scheduled vehicles. Therefore, there is a requirement to group vehicles together by paint color that is to reduce the number of paint color changes (PCC) in the sequence of scheduled vehicles. In order to smooth the workload on the assembly line, vehicles that require special assembly operations have to be evenly distributed throughout the total processed cars. These vehicles are considered to be “hard to assemble.” This requirement is modeled by a ratio constraint N/P. Ratio constraints are associated with car characteristics, which require extra operations on the assembly line (for instance, sunroof and air conditioning). A ratio constraint N/P means that at most N cars in each consecutive sequence of P are associated with the constraint. For instance, if N/P = 3/5, there must not be more than three constrained cars on any consecutive sequence of five cars. There are two classes of ratio constraints, high-priority level constraints and low-priority level constraints. High-priority level ratio constraints are due to car characteristics that require a heavy workload on the assembly line. Low-priority level ratio constraints result from car characteristics that cause small inconvenience to production. High-priority level ratio constraints must be satisfied preferentially to low-priority level constraints.
To summarize, this multi-objective CSP consists of scheduling the production of a set of cars to minimize three different objectives: (a) the number of PCC, (b) the number of violations of high-priority ratio constraints (HPRC) and (c) the number of violations of low-priority ratio constraints (LPRC). These objectives usually conflict. However, they can be considered with different priority levels varying from one factory to another or at different times in the same factory. Renault tackled the problem using a weighted sum method that groups the three objectives into a single-objective function, by assigning different weights to each objective, according to their priority levels. Three problem classes with different objective functions are considered with weights
Class 1. Objective function 1 = W1· number of PCC +W2· number of violations of HPRC +W3· number of violations of LPRC;
Class 2. Objective function 2 = W1· number of violations of HPRC +W2· number of PCC +W3· number of violations of LPRC;
Class 3. Objective function 3 = W1· number of violations of HPRC +W2· number of violations of LPRC +W3· number of PCC.
In this article, instances in the test set X were taken in AENO algorithm performance test. The traditional CSP can be formulated as follows






where
The input car sequence contains n cars with
A set of cars is taken as an example to demonstrate the computation of the violations as follows. The car sequence has seven cars with three options and three colors. The priority and ratio constraint of each option are shown in Table 1.
Example of a CSP.
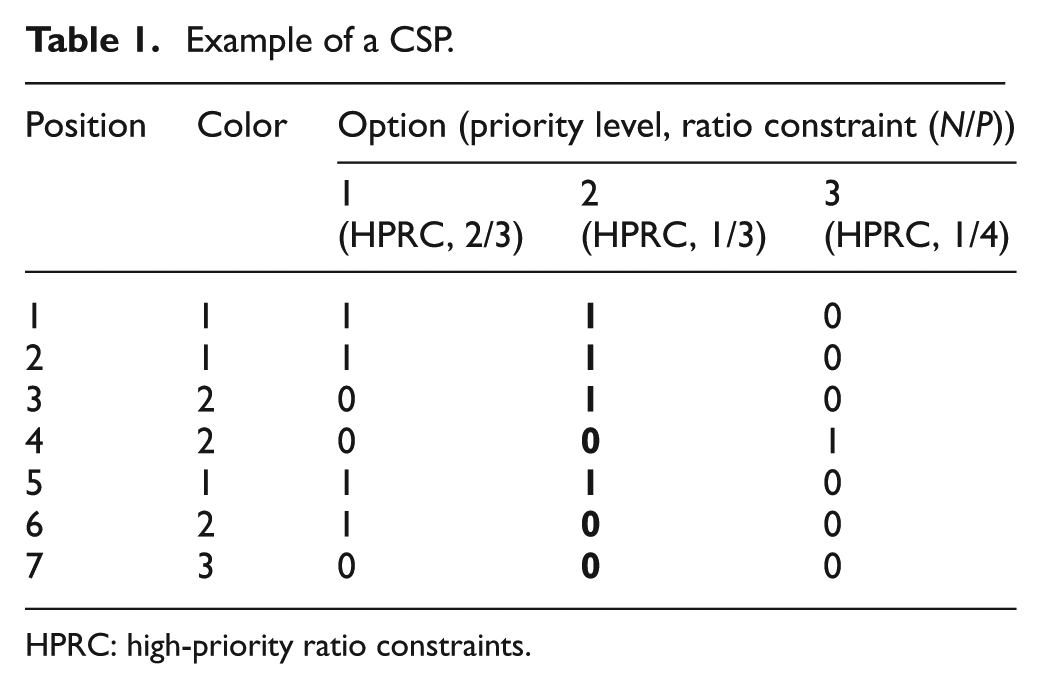
HPRC: high-priority ratio constraints.
The state matrix of this car sequence can be formulated as equation (8) corresponding to equation (7)

In this sequence, option 1 has no conflict. The ratio constraint of this option is 2/3, there are no cases of more than two cars that have the same option in any subsequence of three cars, and option 3 has no conflict as the same reason. However, option 2 has three conflicts, in positions 1–3, positions 2–4 and positions 3–5. Details on the computation of the violations’ number of ratio constraints in each conflict can be described as follows 1

where
For option 2, there are two violations in the first conflict and four violations in all. It implies that rolling sequences (on which the violations’ number of ratio constraints is computed) must begin on production day D-1. For a ratio constraint N/P, the first rolling sequence contains the P-1 ultimately scheduled vehicles of production day D-1 and the first scheduled vehicle of production day D. The vehicles of production day D-1 are already scheduled, so their positions cannot be changed. 1
In this article, the ring sorting buffer is applied in order to study the energy consumption in sorting process. The structure of the ring sorting buffer is shown in Figure 1. In Figure 1, ST is the straight track of the ring sorting buffer, CT is the circular track of the ring sorting buffer, G0 is the entrance of the ring sorting buffer, G1 is the exit of CT, G2 is the entrance of CT and G3 is the exit of the ring sorting buffer. In the ring sorting buffer, G3 can go through all the cars that it can schedule the cars exactly as the requirement if the capacity of the buffer is enough. The energy consumption of the sorting proceeding can be formulated as follows

where wi is the additional power consumption of the car i in the sorting process, T is the operating time of the sorting buffer and W0 is the unloaded power consumption of sorting buffer.
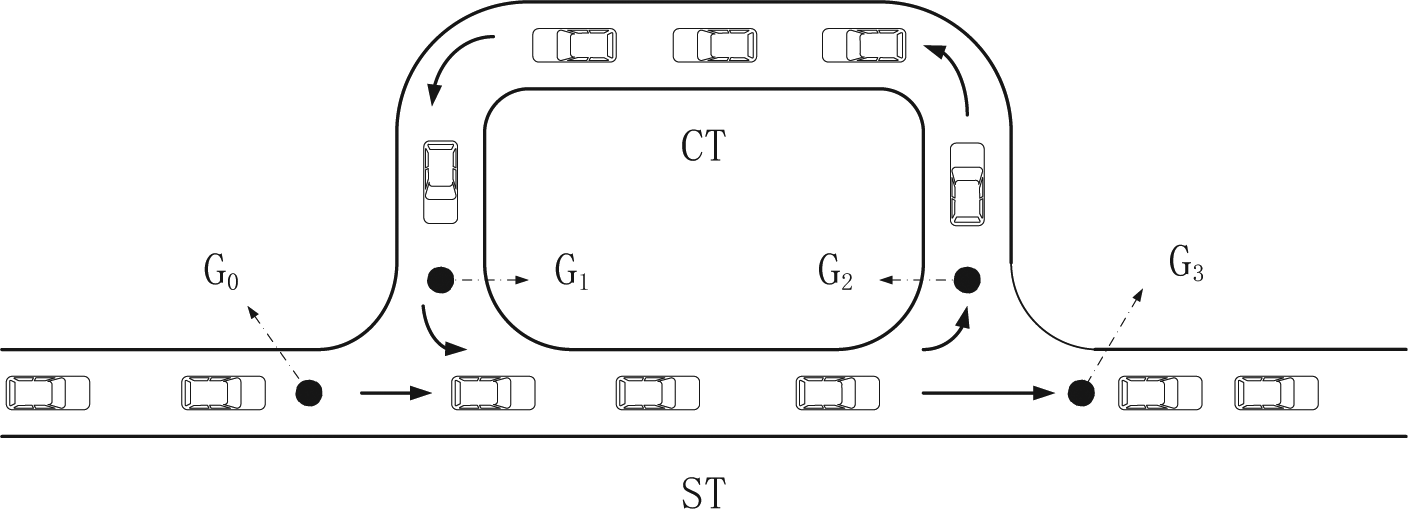
Ring sorting buffer.
The cars that need to be scheduled can circulate along the track in the ring sorting buffer until they get the right place in the sequence and exit from the outlet G3. The rest of cars in the sequence, which do not need to be scheduled can enter the ring sorting buffer from the inlet G0, go through the track ST and then exit from the outlet G3 directly.

where
Parameters

In equation (12),

The

First,

The car has to be sorted by ring sorting buffer when the serial number of it in the CT appears reverse order in the car sequence, so the computation of


where





With sorting the

The number

It can be seen above that the energy consumption is closely related to the order of the target sequence. With the same value of objective function (equation (1)), there may be different optimal sequences with different energy consumptions. The order of the target sequence requires more attention. Therefore, energy consumption and traditional CSP are integrated into a multi-objective optimization problem. The multi-objective function can be formulated as follows
where
AENO algorithm
In this section, an AENO algorithm for the CSP-EC is proposed. The main idea of AENO algorithm is imitation of competition and migration process in nature. The car sequence is simulated as an ecosystem, each car is simulated as a population, cars with the same color have the same habitat and the options of cars are simulated as ecological factors. If the car has this option, it means that the population has this ecological factor, the value of the ecological factor of this population in the state matrix is considered 1 and otherwise, it is considered 0. The ratio constraint of options is simulated as the range of foraging. For example, if the ratio constraint of the option is 1/3, it means that in this ecological factor, the total resource in radius of three positions can accommodate only one predator or the niche overlap will happen. Competitive exclusion happens between the populations when niche overlaps appear and then the populations emigrate to somewhere for the abundant resource. This process is shown in Figure 2. The algorithm consists of two stages, the first stage is optimization of habitat distribution including habitat concentration and artificial migration of habitat, the second stage is optimization of population distribution in habitat including initialize the population of habitat, territorial differentiation and priority optimization of ecological factors. During the first stage, populations with the same habitat get together in the process of habitat concentration, and then artificial migration of habitat optimizes the distribution of these habitats. The purpose of the first stage is to optimize resource distribution in global. During the second stage, the population of the habitat is initialized, and territorial differentiation and priority optimization of ecological factors are applied to redistribute populations in each habitat. The purpose of the second stage is to optimize resource distribution in the local. Energy consumption in sorting process of car sequences is simulated as the energy consumption during the migration of populations. In nature, the number of populations and the distance of their migration are related to energy consumption during the migration. It is seen that less number of scheduling cars and a shorter distance of the scheduling during the sorting process can reduce the value of parameter
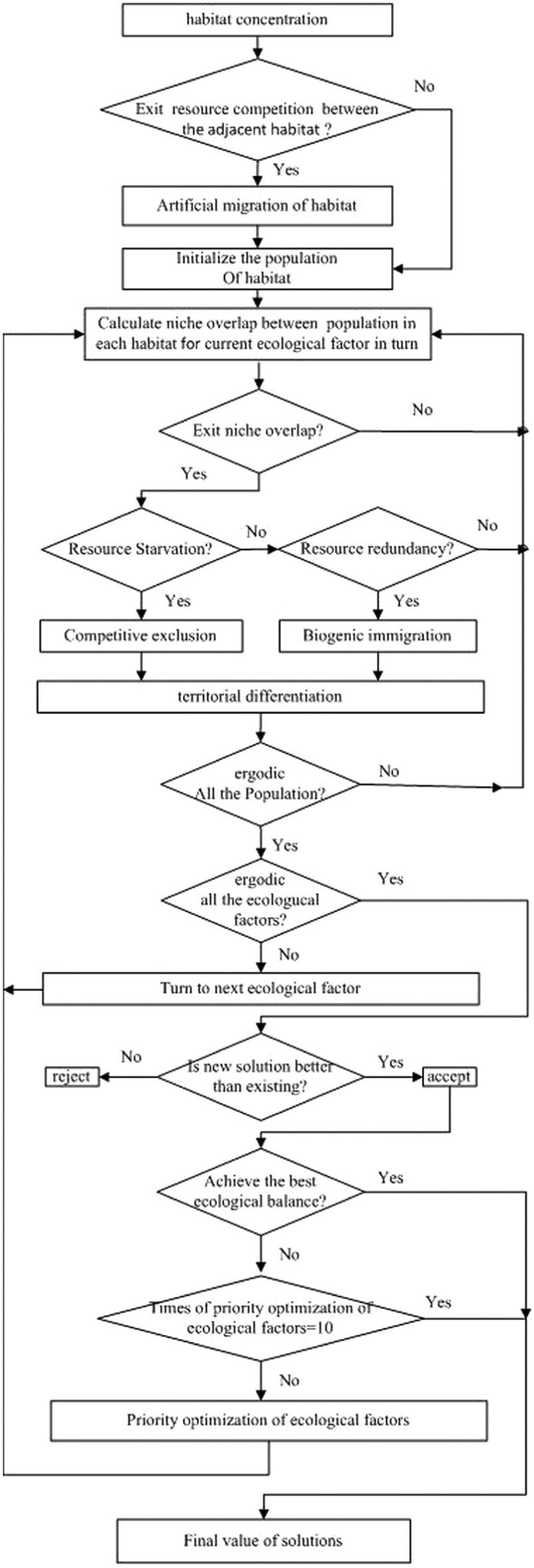
Flowchart of AENO algorithm.
Optimization of habitat distribution
During the habitat concentration, all the populations that have the same habitat gather together and then the resource needs will be calculated in each ecological factor for every habitat in equation (29)

where
If
The following procedure was proposed in order to make the distribution of resource more reasonable. Figure 3 shows the steps of a summary presentation of optimization between habitats. The Proc1 in Figure 3 adjusts the distribution of resources through row operation of
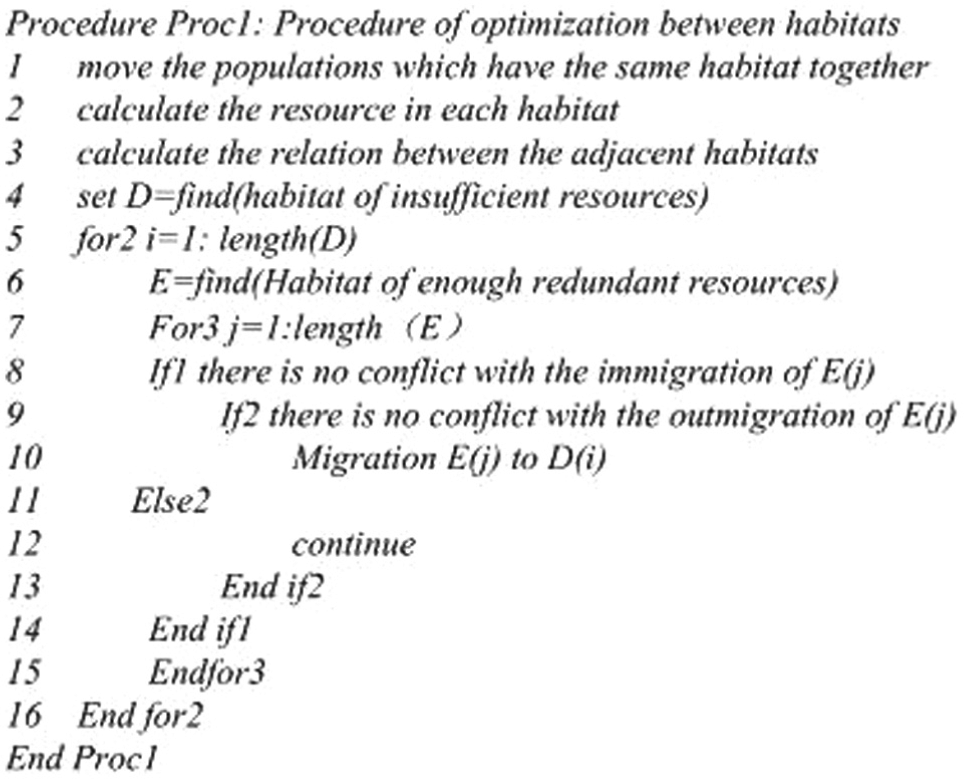
Procedure of optimization between habitats.
Optimization of population distribution in habitat
The distribution of population can be formulated in equation (7). In each habitat, there are more abundant nonliving resources in front of it. The populations in the back area will migrate to the front area for the abundant nonliving resources if the immigrate does not cause ecological niche overlap. When niche overlaps appear between populations in some ecological factors, competition and exclusions will happen. The populations will migrate to somewhere with more abundant resource in the habitat. Figure 4 shows the steps of a summary presentation of optimization in habitat. In Figure 4,




where
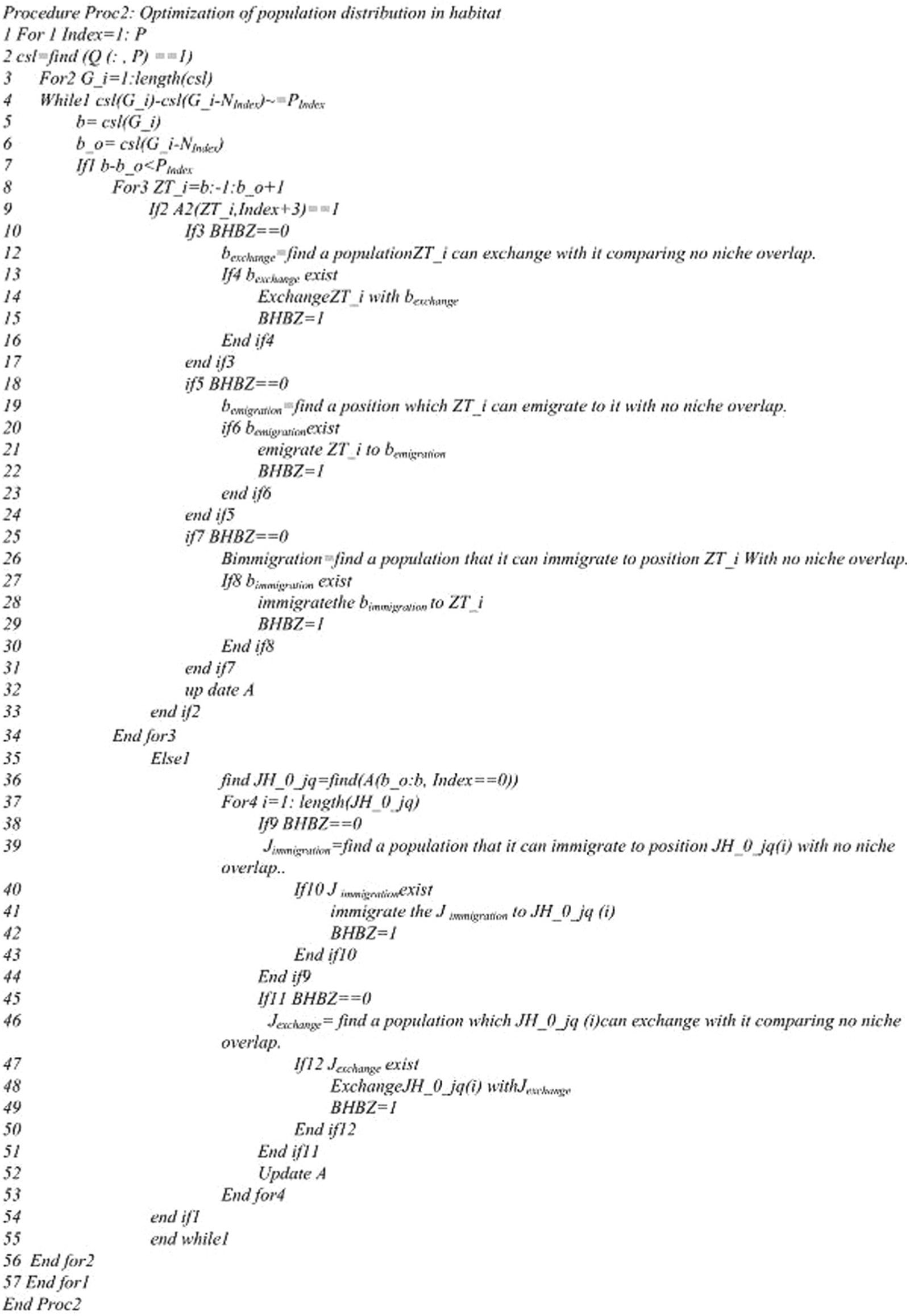
Optimization of population distribution in habitat.
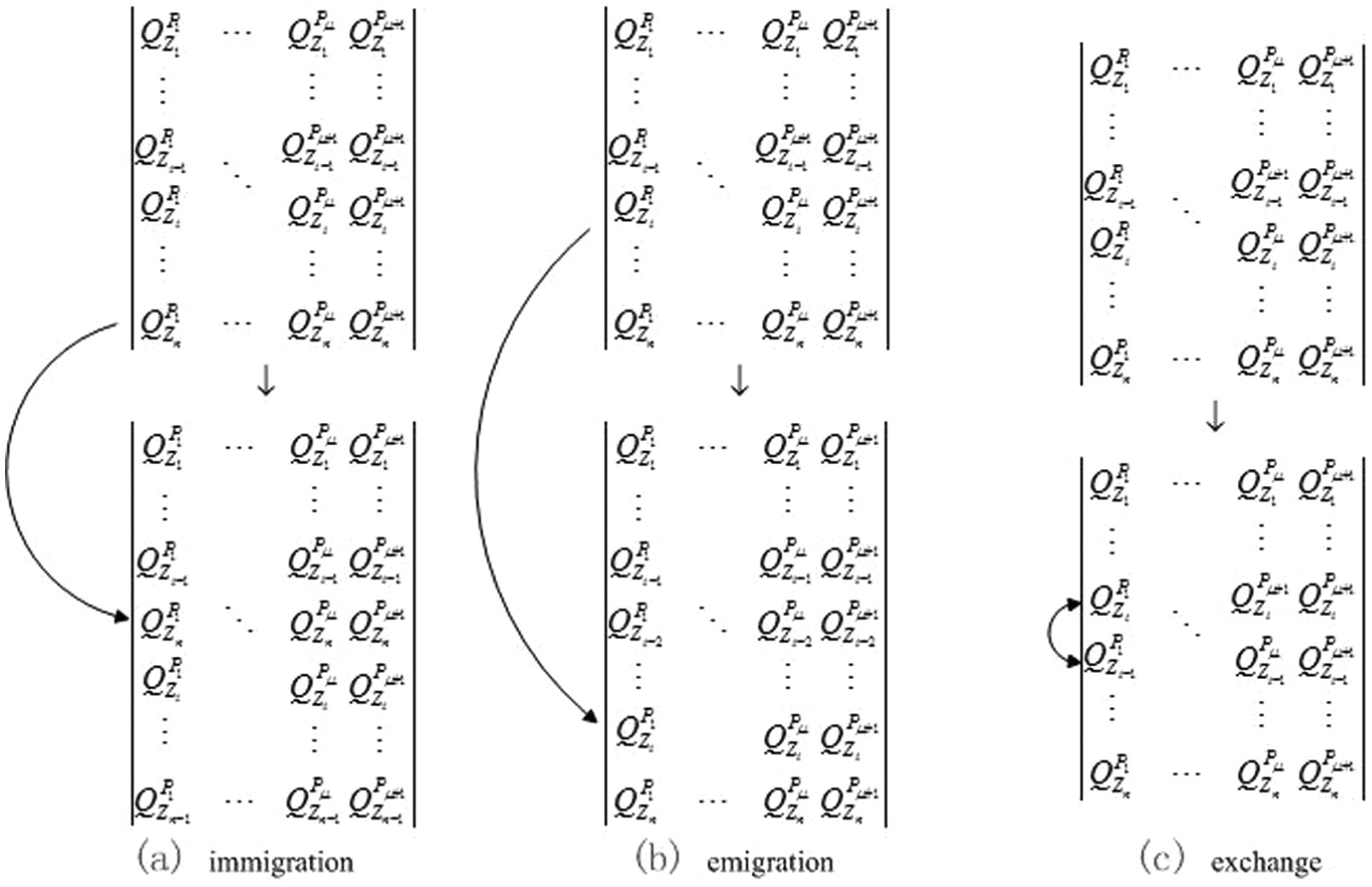
Migration patterns of population: (a) immigration, (b) emigration and (c) exchange.
When the conflicts appear, the number of niche overlaps in each conflict is calculated according to equation (9). Then the optimal value
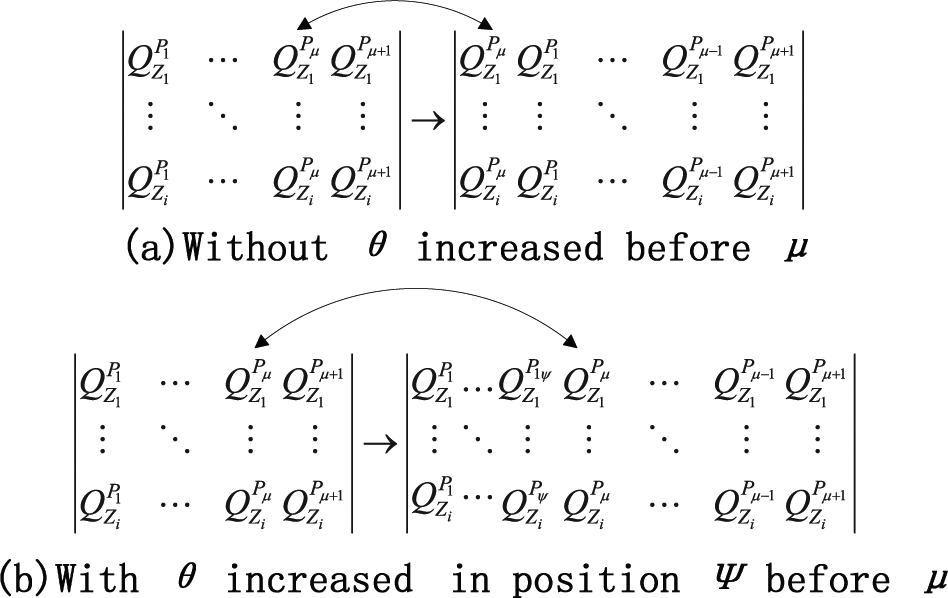
Priority improvement of the ecological factor
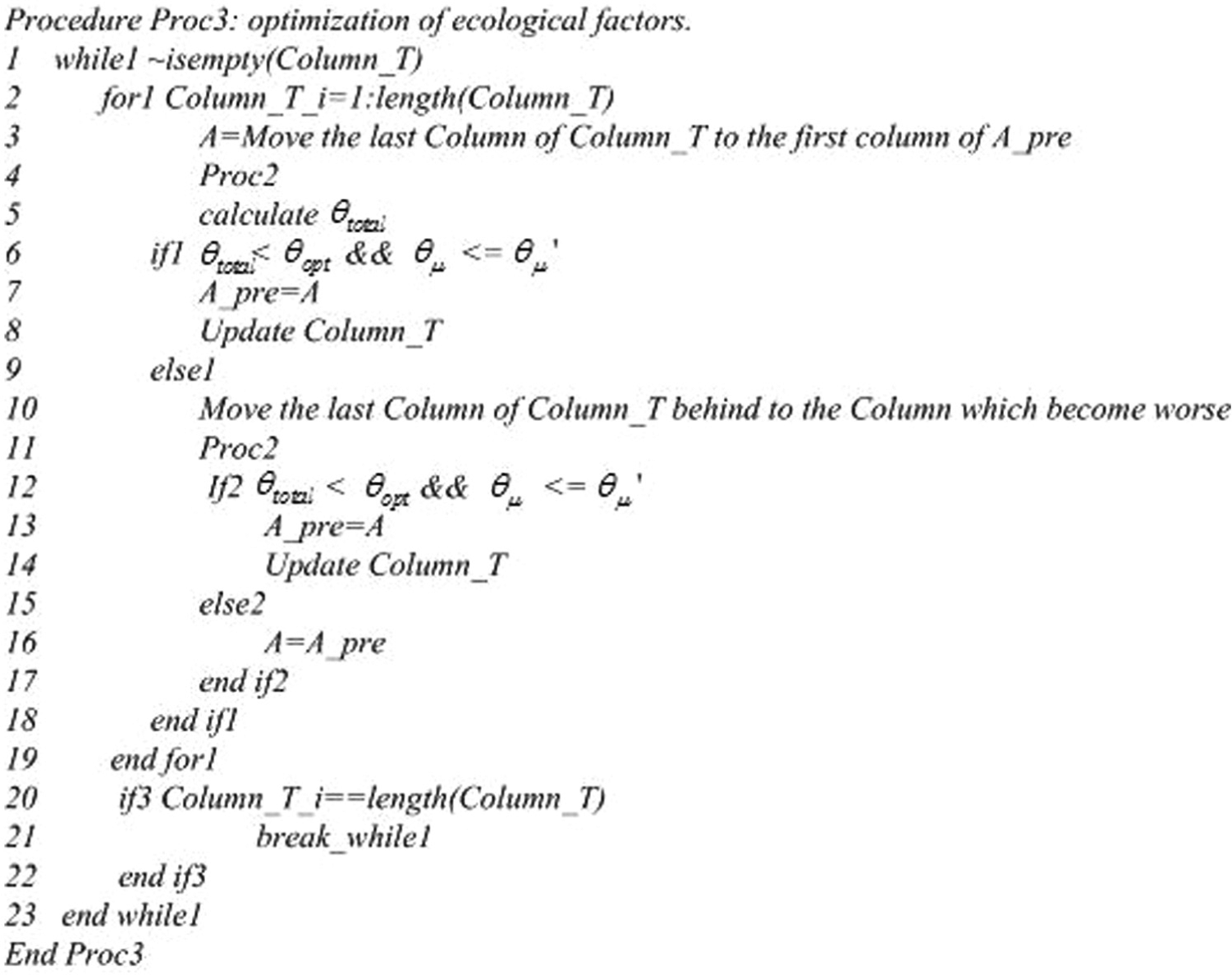
Optimization of ecological factors.
Energy consumption optimization
The basic idea of AENO without considering the energy consumption in the sorting process of ring sorting buffer is given above. In the nature, during the migration, the energy consumption is related to the population quantity of migration and their migration distance. It is very similar to the energy consumption in the sorting process of the ring sorting buffer according to equation (12). The program is optimized to reduce the energy consumption as follows:
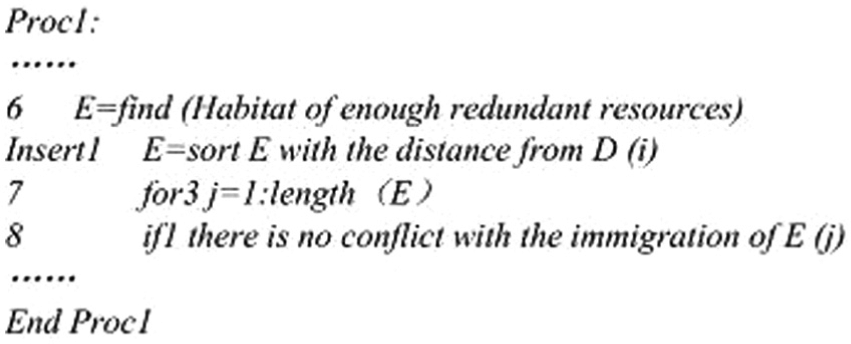
The optimization of Proc1 in Figure 3 is shown in Figure 8. Line Insert1 sort E by the distance from D (i) can reduce the migration distance in the optimization process.
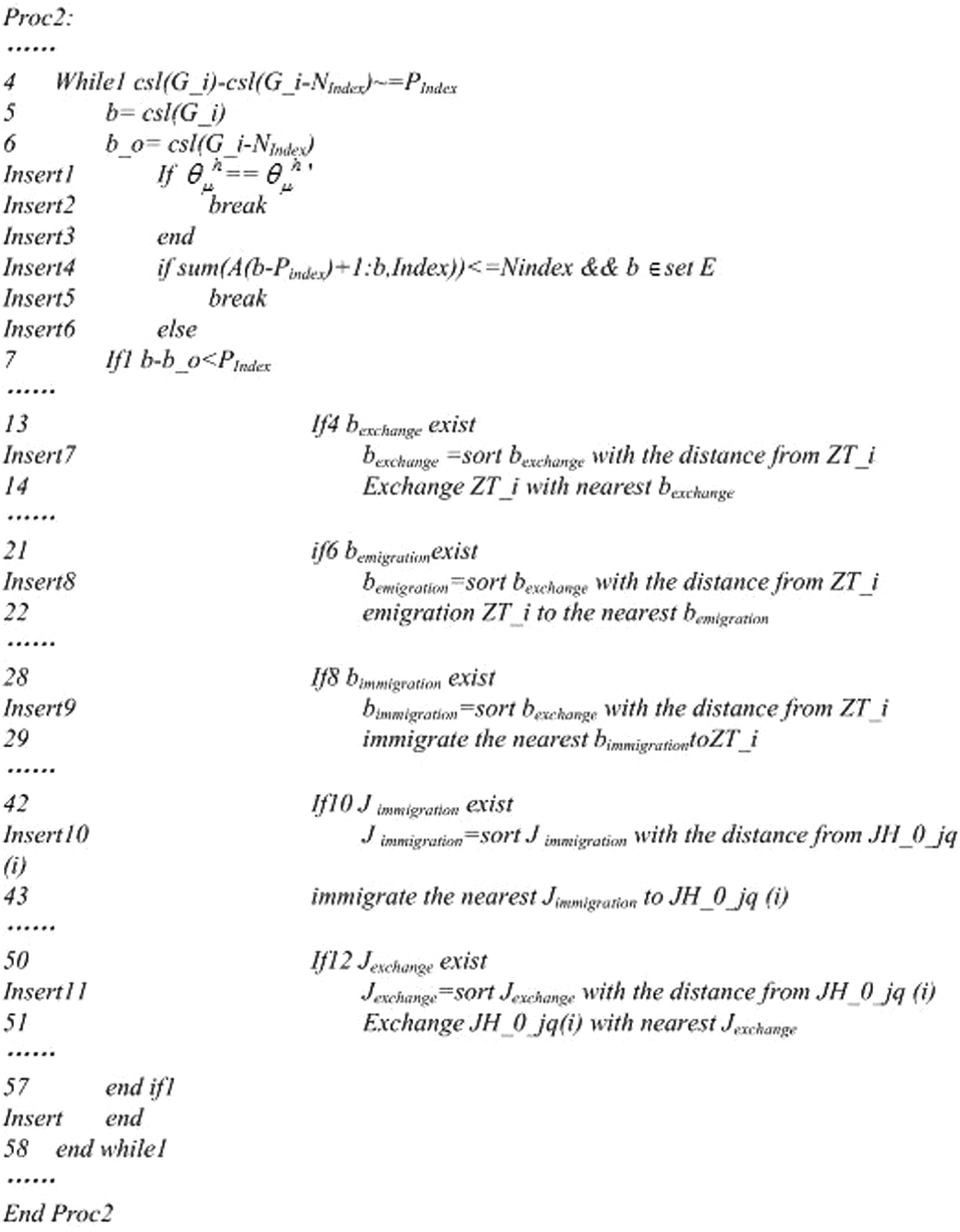
The optimization of Proc2 in Figure 4 is shown in Figure 9,
Program optimization of Proc1.
Program optimization of Proc2.
Computation results
In order to evaluate the performance of AENO algorithm, this algorithm was tested on instances of test set X provided by Renault. These instances are available from the challenge Web site. 1 There are three different objective instances in the test set X. The objective of the 2005 ROADEF Challenge is to minimize the violations in the production process, ignoring the order of the cars in optimal sequence, which may lead to more energy consumption. In this article, instances of Class 1, which are combined with energy consumption in ring sorting process, are taken to test the AENO algorithm.
The algorithm proposed in this article was coded in MATLAB R2010b, and all experiments were implemented on a computer with Intel Core 2 CPU at 2.4 GHz and 2 G memory. The computational results and comparisons obtained from ROADEF’2005 are shown in Tables 1–3.
TEST 022_RAF_EP_ENP_S49_J2.
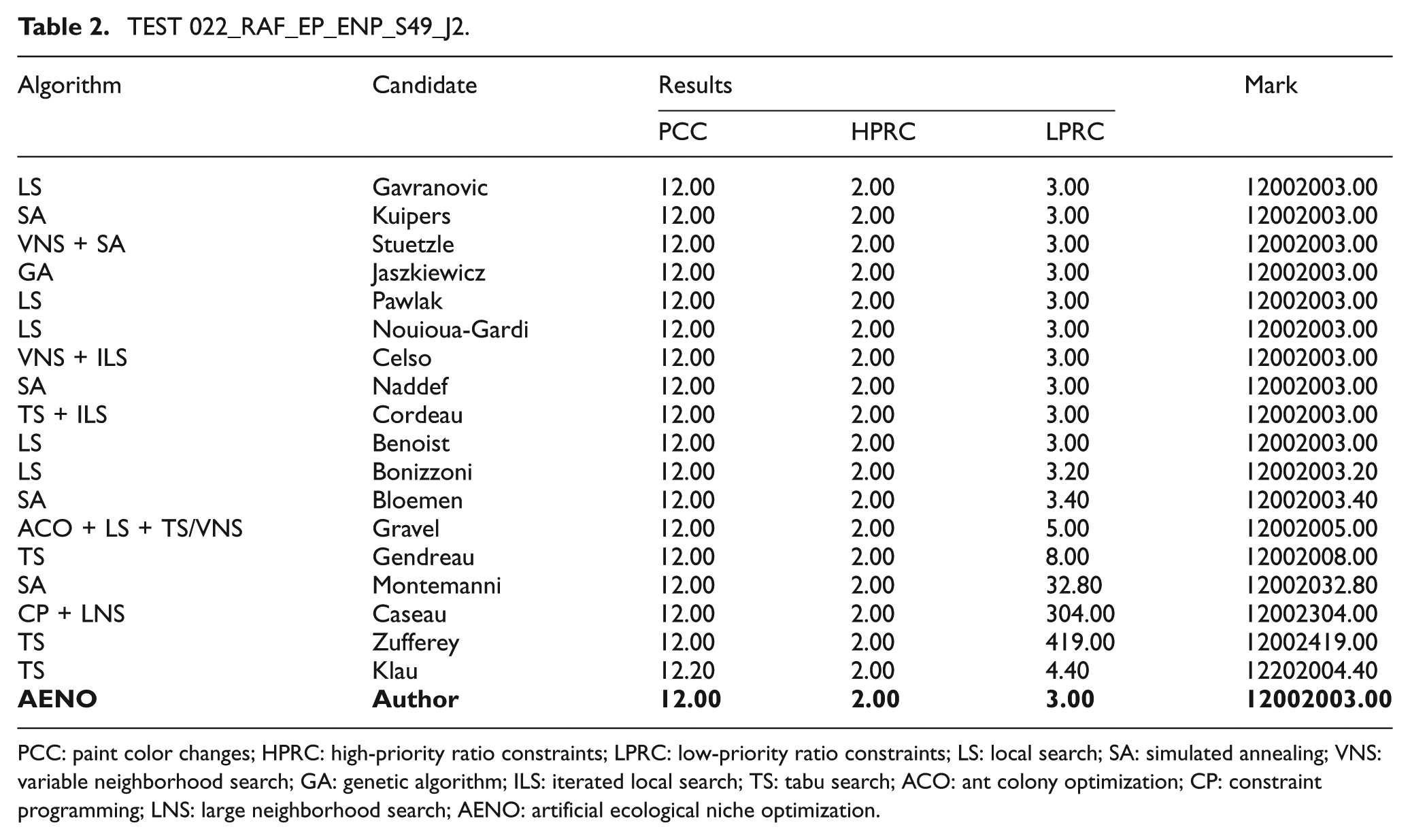
PCC: paint color changes; HPRC: high-priority ratio constraints; LPRC: low-priority ratio constraints; LS: local search; SA: simulated annealing; VNS: variable neighborhood search; GA: genetic algorithm; ILS: iterated local search; TS: tabu search; ACO: ant colony optimization; CP: constraint programming; LNS: large neighborhood search; AENO: artificial ecological niche optimization.
TEST 035_CH1_RAF_EP_S50_J4.
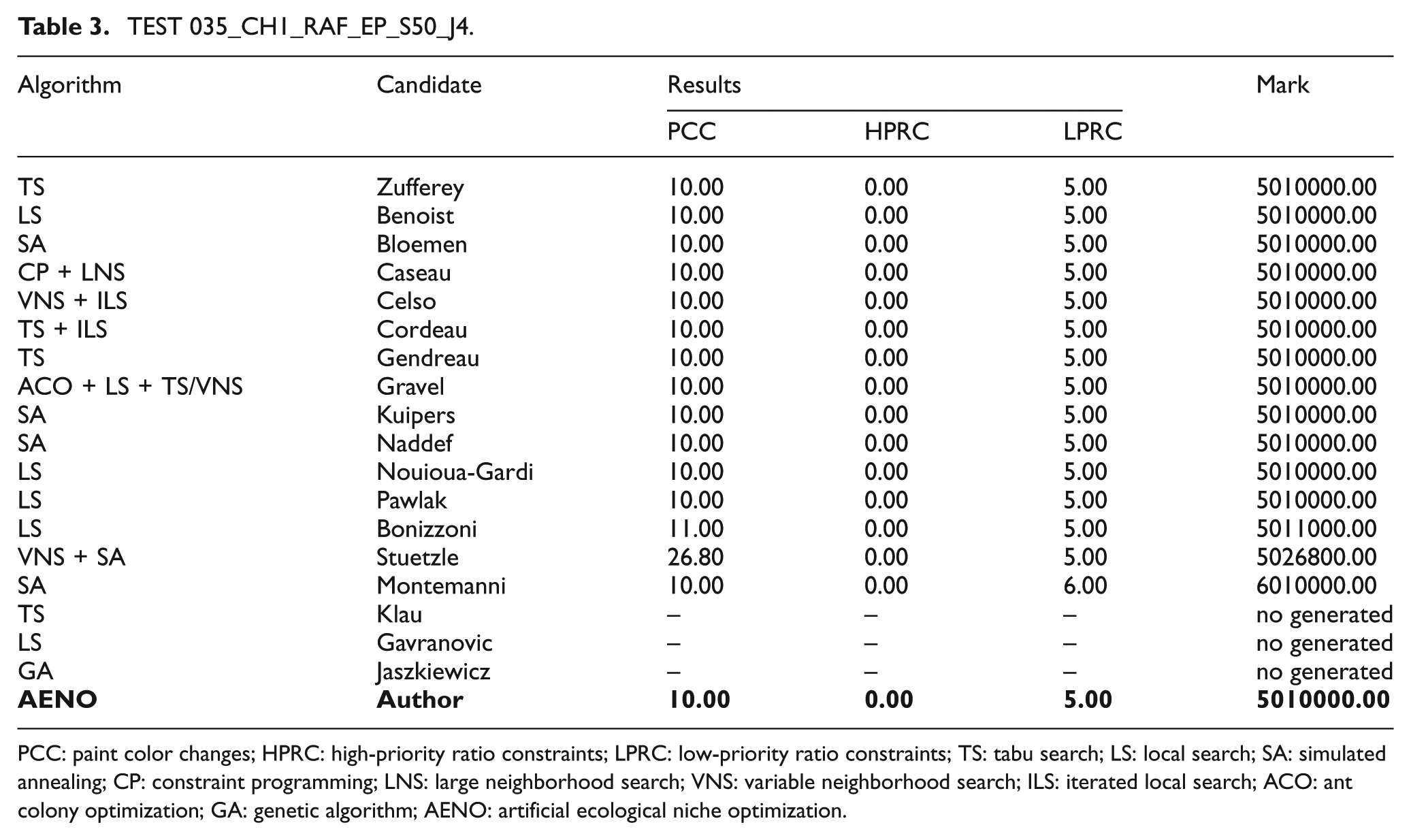
PCC: paint color changes; HPRC: high-priority ratio constraints; LPRC: low-priority ratio constraints; TS: tabu search; LS: local search; SA: simulated annealing; CP: constraint programming; LNS: large neighborhood search; VNS: variable neighborhood search; ILS: iterated local search; ACO: ant colony optimization; GA: genetic algorithm; AENO: artificial ecological niche optimization.
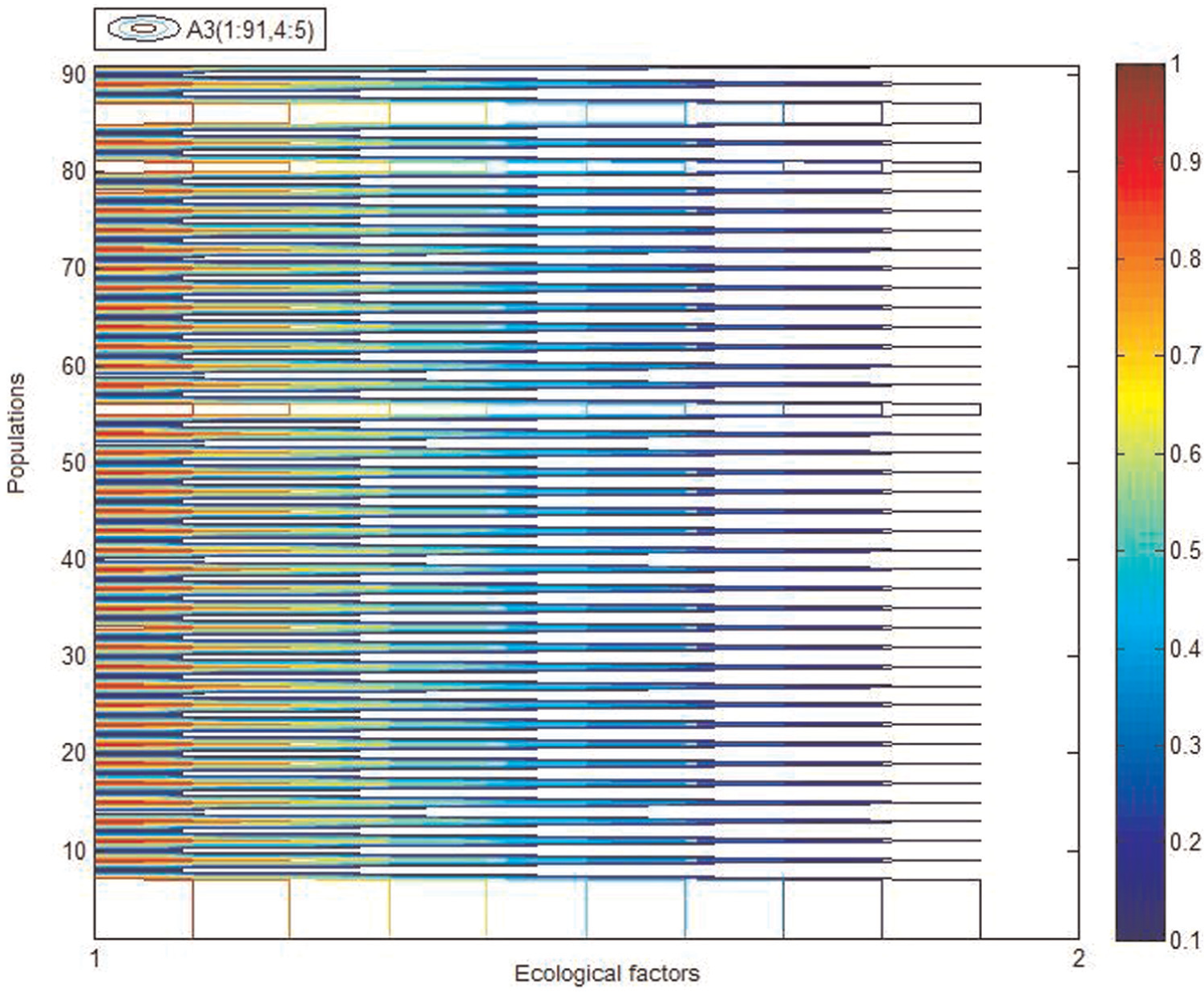
In Table 2, there are 11 candidates with the best result with six different algorithms; in Table 3, there are 13 candidates with the best result with seven different algorithms; in Table 4, there are 13 candidates with the best result with eight different algorithms. From Tables 2–4, only five kinds of algorithms are seen with the best result in all three instances, including SA, LS, VNS + ILS, TS + ILS and AENO. However, AENO is a heuristic algorithm in which computing time is fast. The average computing times of 10 times for these three instances, respectively, are 12.553, 0.703 and 0.360 s. Therefore, AENO is one of the effective algorithms for CSP. The ecological niche distributions of these three ecosystems, which have been optimized, are shown in Figures 10–12. The abscissa axes are the ecological factors and the vertical axes are the populations.
TEST 035_CH2_RAF_EP_S50_J4.
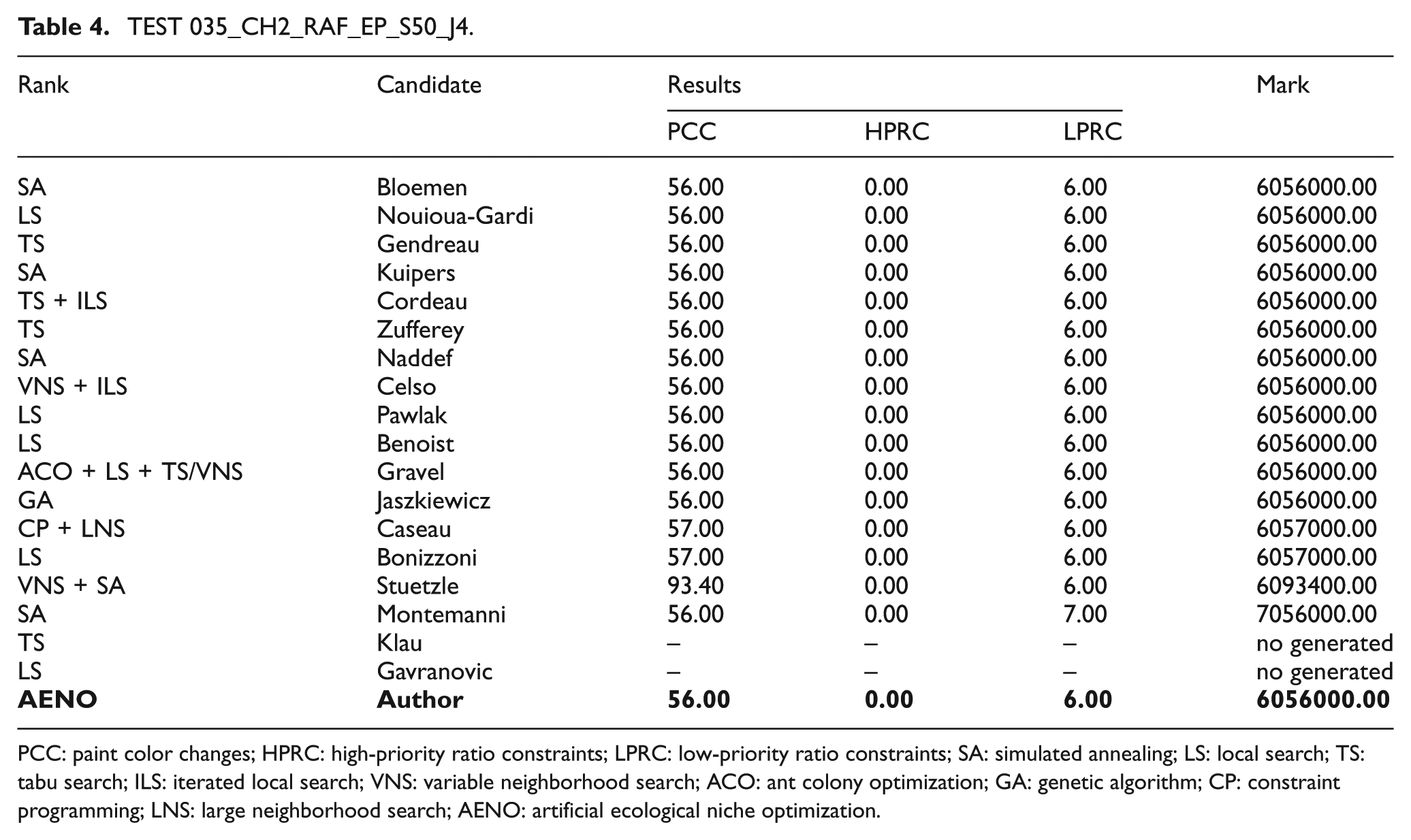
PCC: paint color changes; HPRC: high-priority ratio constraints; LPRC: low-priority ratio constraints; SA: simulated annealing; LS: local search; TS: tabu search; ILS: iterated local search; VNS: variable neighborhood search; ACO: ant colony optimization; GA: genetic algorithm; CP: constraint programming; LNS: large neighborhood search; AENO: artificial ecological niche optimization.
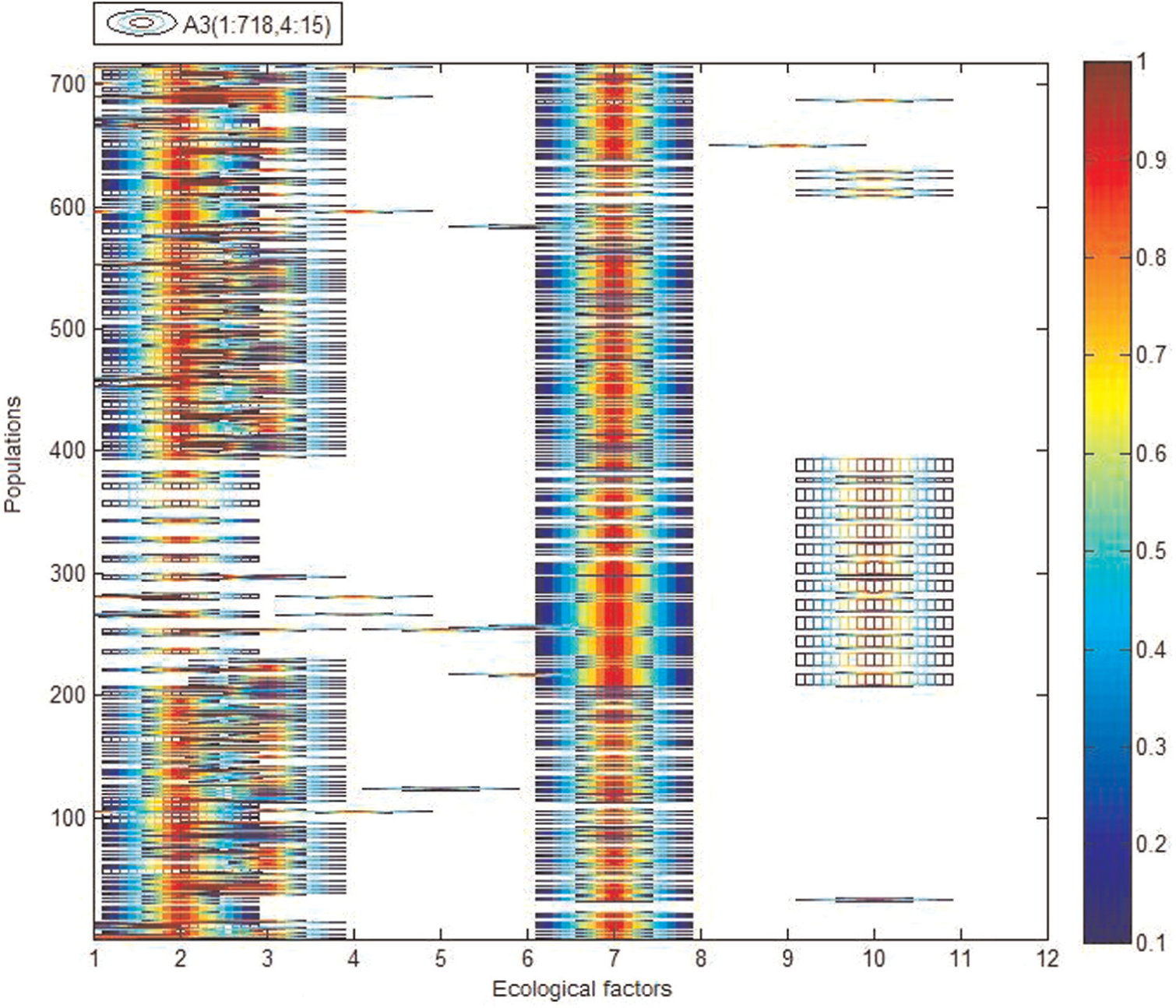
Ecological niche distribution of ecosystem TEST 022_RAF_EP_ENP_S49_J2.
Ecological niche distribution of ecosystem TEST 035_CH1_RAF_EP_S50_J4.
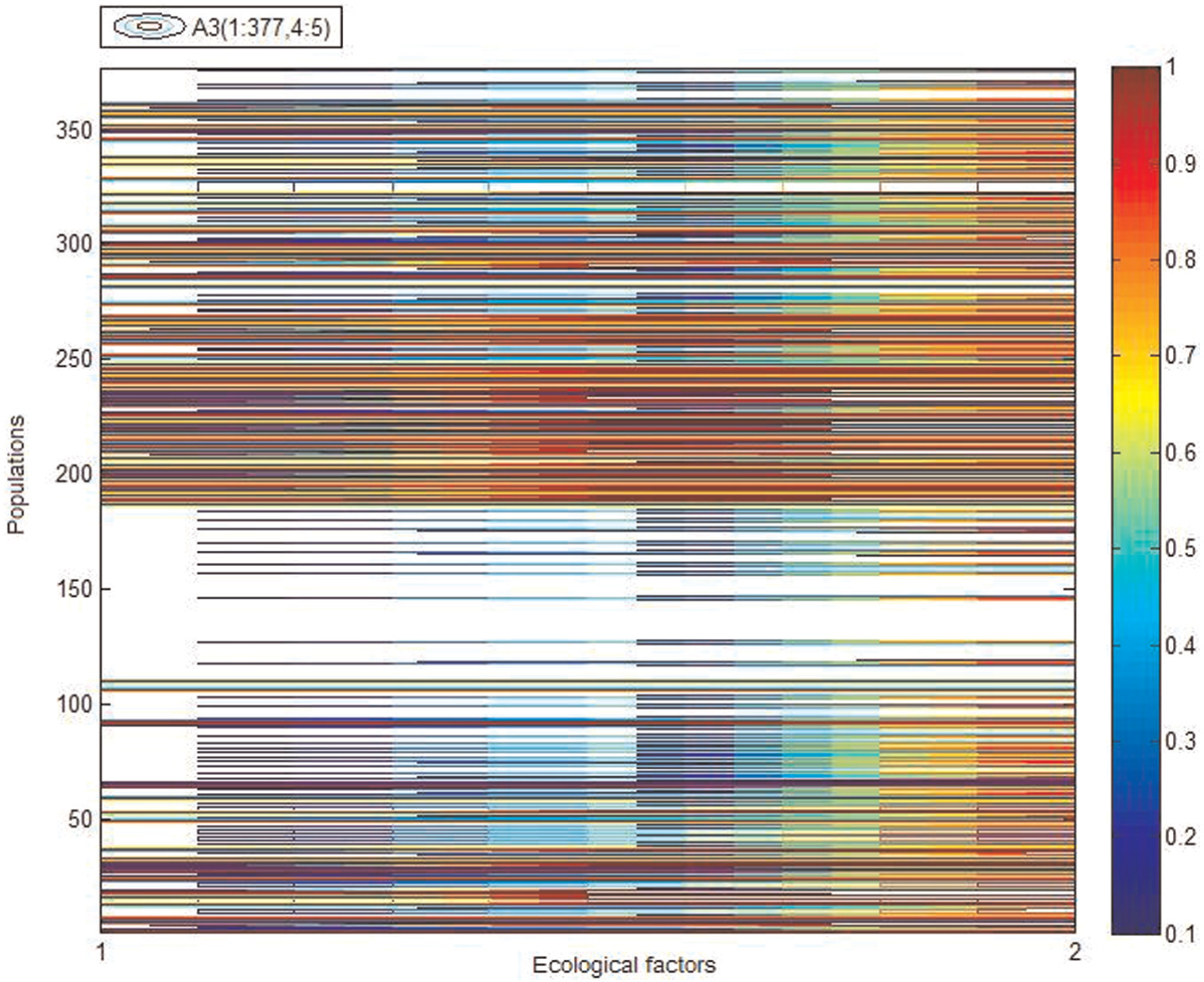
Ecological niche distribution of ecosystem TEST 035_CH2_RAF_EP_S50_J4.
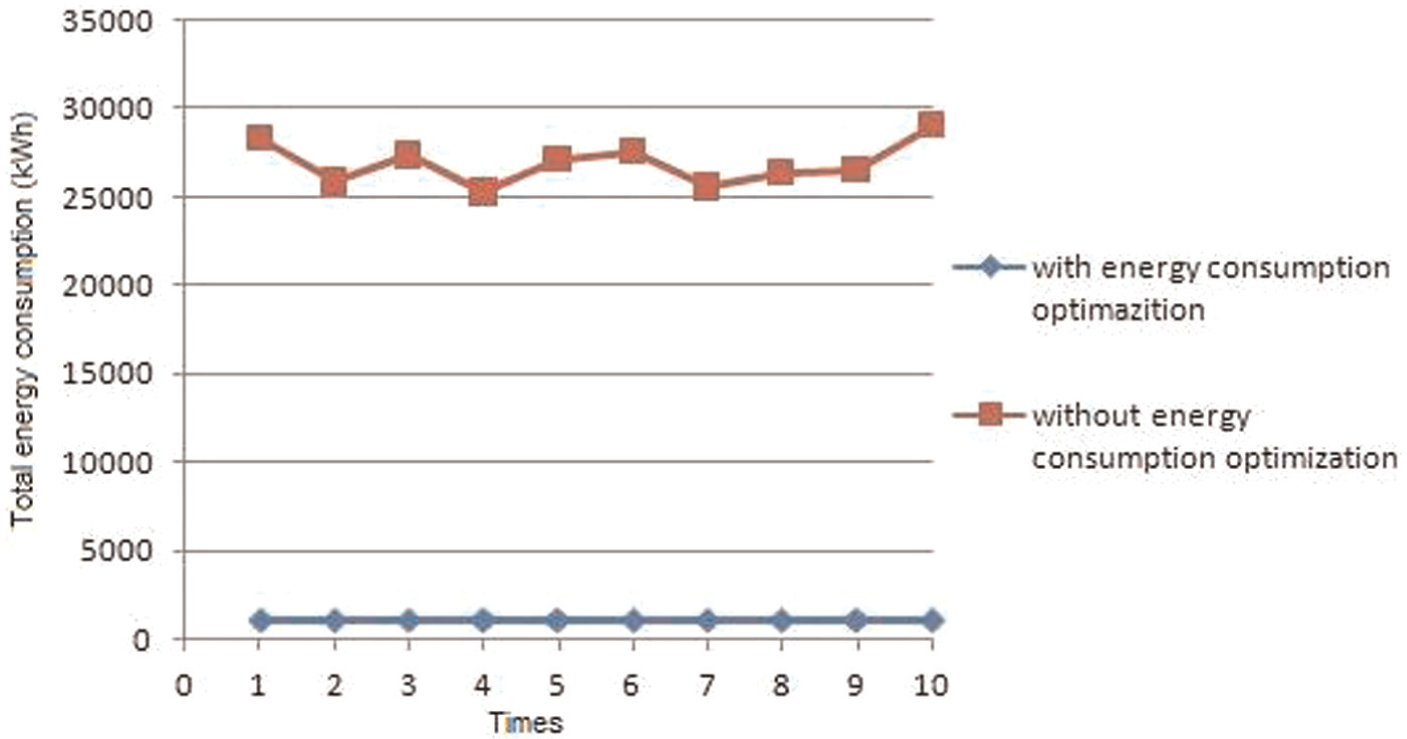
In addition, for every experimental instance, the algorithm has been applied 10 times with and without energy consumption optimization. The optimal sequence is different due to the complexity of CSP. These optimal results have the same number of violations. It is used to help us study the energy consumption in the ring sorting buffer. According to equation (28),
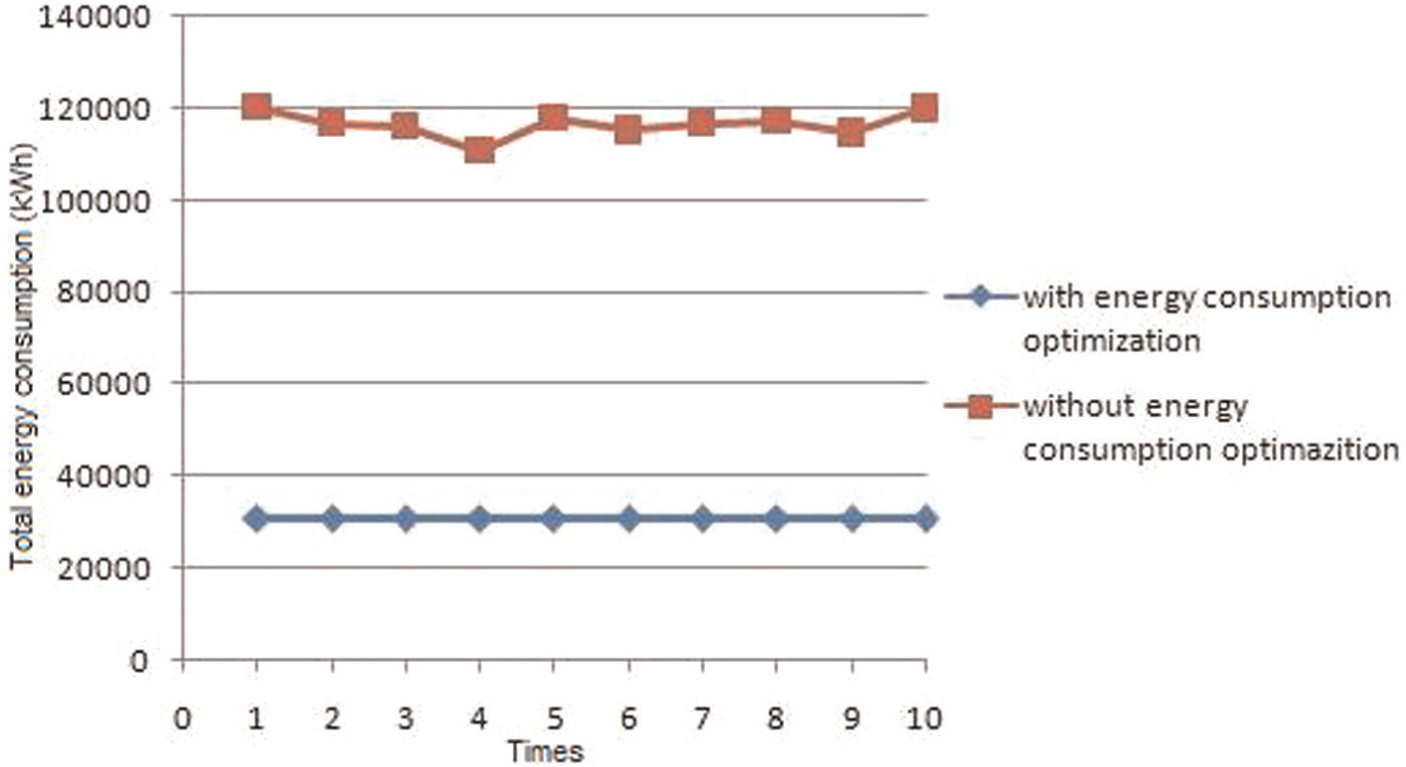
Contrast of total additional energy consumption in TEST 022_RAF_EP_ENP_S49_J2.
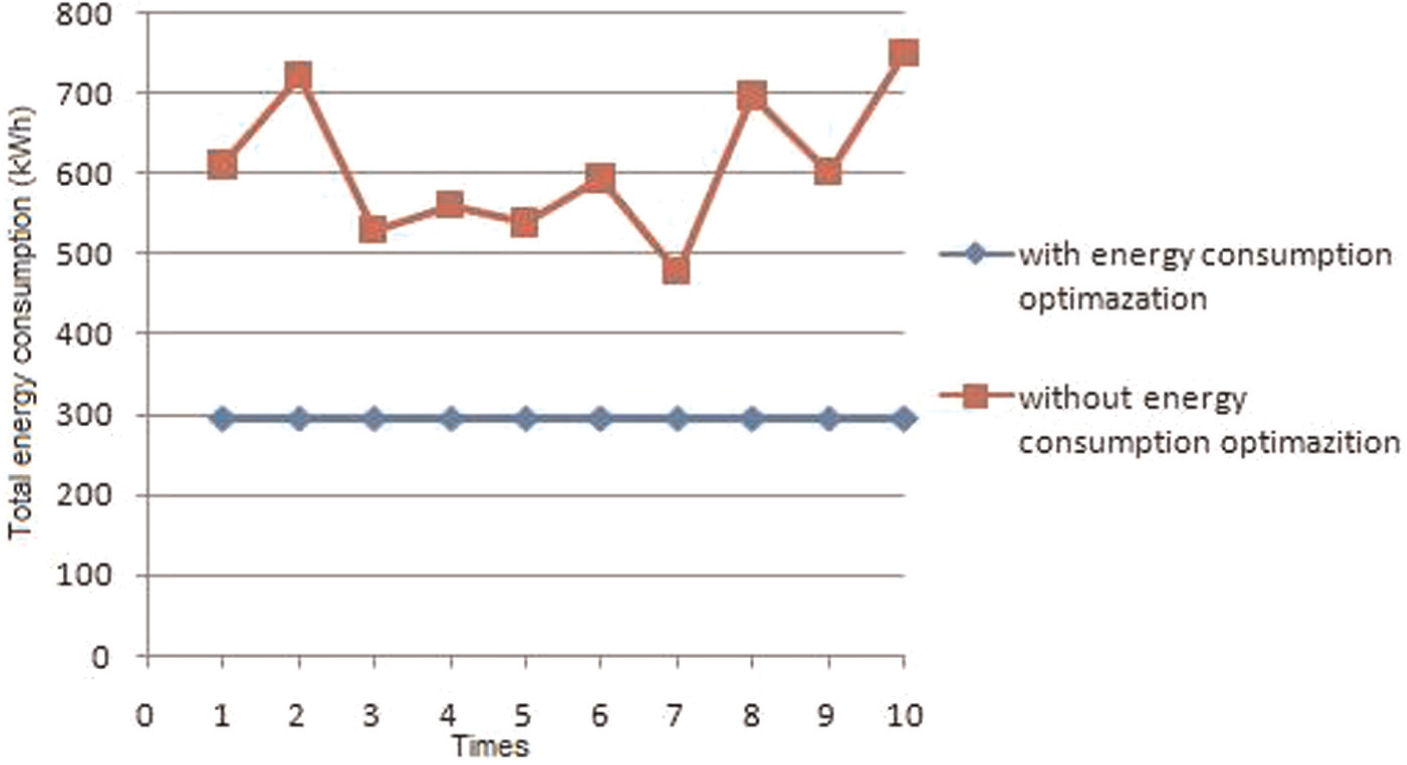
Contrast of total additional energy consumption in TEST 035_CH1_RAF_EP_S50_J4.
Contrast of total additional energy consumption in TEST 035_CH2_RAF_EP_S50_J4.
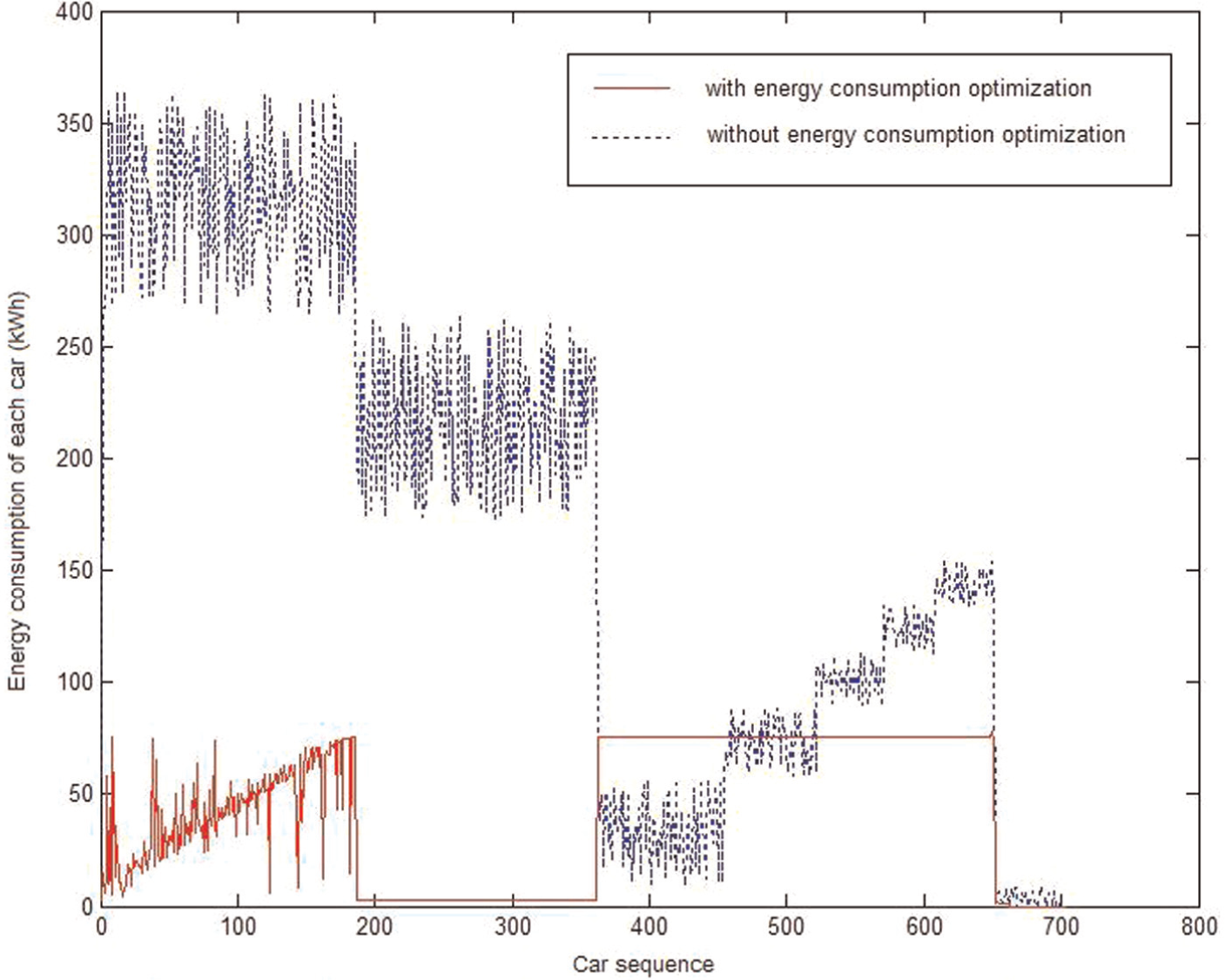
Additional energy consumption for each car in TEST 022_RAF_EP_ENP_S49_J2.
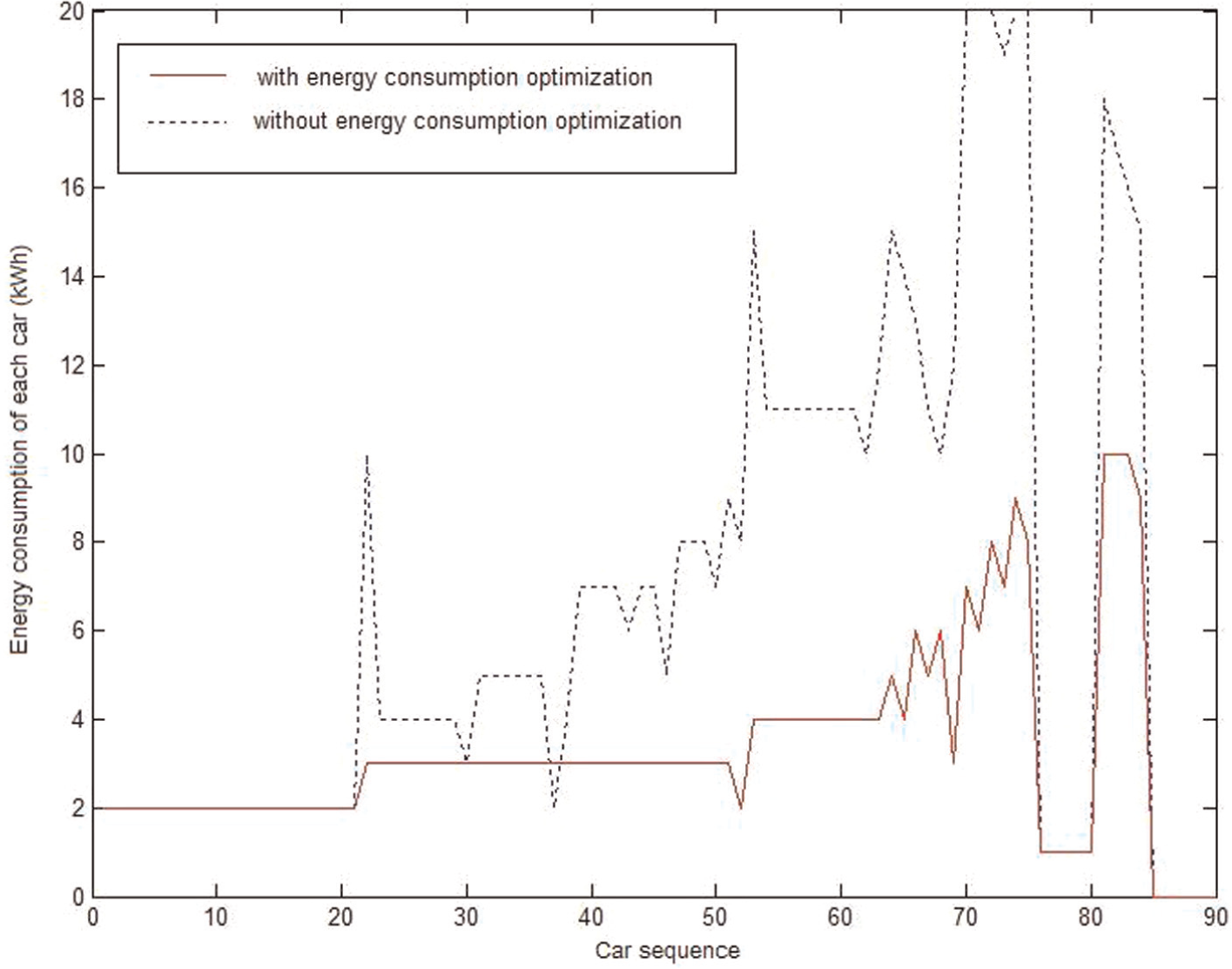
Additional energy consumption for each car in TEST 035_CH1_RAF_EP_S50_J4.
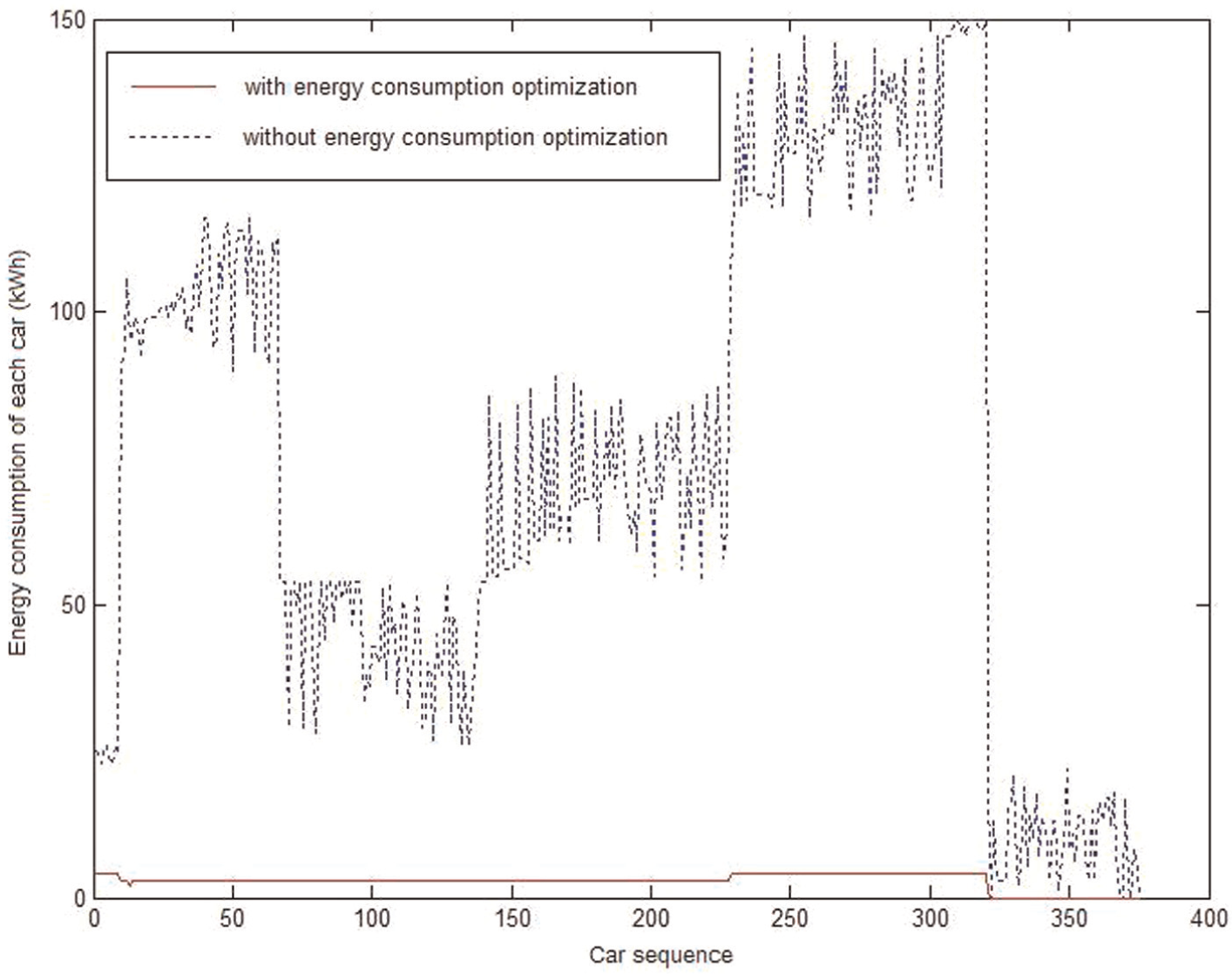
Additional energy consumption for each car in TEST 035_CH2_RAF_EP_S50_J4.
From the results above, AENO algorithm can effectively solve the CSP. When considering the population quantity of migration and their migration distance in AENO algorithm, the energy consumption will be saved effectively.
Conclusion
In this article, there are three main contributions to the CSP: the modeling of energy consumption in the sorting process, AENO algorithm and the quality of numerical results for CSP-EC. The model in this article combined the traditional CSP-EC. Ring sorting buffer is used in studying the energy consumption in the sorting process, and the model of energy consumption in the ring sorting buffer is proposed. The objective of the model is to find a car sequence with fewer color changes in paint shop, fewer violations in assembly shop and less energy consumption in the sorting process. A novel AENO algorithm is proposed for the CSP-EC, which imitates natural ecosystem. The aim of this heuristic algorithm is to reconstruct a harmonious natural ecosystem with less conflict between populations. The competitive exclusion principle of nature was combined with human intervention in the process of reconstruction. Human intervention is used to reconstruct the distribution of habitats, and competitive exclusion principle is the main principle in population migration. Energy consumption in migration is associated with population quantity and their migration distance. According to a real-life industrial problem, computational results show that AENO algorithm can perform well in traditional CSP, and it can get a better optimal sequence with less energy consumption in the sorting process.
There are still some issues not solved in this article. The AENO can be used only in the CSP instances of Class 1, which do not consider the limitation on the upper batch size in paint color batches. When considering the limitation of batch size, the habitat concentration in AENO will become more complex. Future works will be done to improve AENO algorithm to suit all kinds of CSP.
Footnotes
Acknowledgements
The contribution to knowledge provided by Journal of Engineering Manufacture is appreciated.
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research was supported by the State Key Program of National Natural Science of China (grant no. 51035001) and National Natural Science Foundation of China (grant no. 51275190).