
Abstract
Design by analogy is a powerful technique for new design solutions. In the literature, there are two possible approaches. The first is more user-friendly but is low structured. The other is more complex, which structures the problem better but is highly time-consuming. This article presents a simple system for structuring the design-by-analogy method, which is based on the abstraction of the problem. The application of these solutions resulted in an increase in design possibilities. Results were collected in a repository, whose order is based on functional logic. The proposed technique was tested on the conceptual phase in the design of novel grippers. The application resulted in the development of innovative grippers. The process can be extended to many different fields. The method can be used as a creativity support during the design phase, also creating repositories that can be enlarged and reused for different applications.
Introduction
During the conceptual design phase, often the designer tries to generate different alternatives and explore divergent design solutions. In this phase, several methodologies are often used to abstract the problem and formulate innovative ideas and products. A well-known and powerful technique for exploring new concepts is design by analogy. It allows the designers to take inspiration from the functioning of different objects and living beings. In the literature, the main approaches are located between the following two cases:
The first one groups user-friendly but low-structured approaches. They are based on lexical analysis (synonyms, antonyms, hyperonims and so on) and are sometimes enhanced by software or databases, such as in the studies by Fantoni et al. 1 and Linsey et al. 2 Databases are generally used as a further source of inspiration for the designer. Generally, they are very simple tools, easy to use, but they provide only general ideas and not detailed solutions.
The second one collects more complex but more structured approaches. They help the designers in structuring the problem in a better way through several steps, but they are highly time-consuming. These methods can be based on functional approaches 3 or the “theory of inventive problem solving” (TRIZ theory). 4 The long learning time represents the main drawbacks of such methods.
The present article would like to fill the gap by presenting (1) a smart simplification for structuring and abstracting the problem and (2) a structured way for systematizing heuristic approaches. The method has not to be considered as a novel method invented by the authors, but instead a (hopefully) smart reinterpretation of methods already known and applied in both the academia and industry. The first step of the proposed approach starts from the abstraction of the problem, as the TRIZ theory suggests. 4 Then, following a functional perspective (similar to Nagel et al. 5 ), many similar products, systems or living beings can be identified in a structured way. The identified products, systems or living beings are then clusterized in a database according to a functional logic. Then, they become a new source of inspiration for the designer. As we will detail in the following paragraphs, the presented methodology benefits from some of the fundamental steps of the structured methods, but it remains simple to learn and to be used.
The study presented here has two different purposes and related novelties. The first purpose is to explain and test a six-step method based on problem formulation, abstraction and design by analogy. The second purpose is to present design alternatives in the design of new grippers. Therefore, readers more interested in design can focus on the methodological part in section “Methodology” and consider the application to the gripper as a case study in the next sections. Conversely, in sections “Application of the method to the design of new grippers” and “An industrial case study,” those involved in automation and robotics can find interesting hints on how to increase gripper designs thanks to the method presented in this article.
State of the art
Design by analogy is a useful methodology often adopted by professional designers, at both academic and industrial levels. Sometimes, the analogy technique is adopted considering only elements belonging to the same domain as the product under study (close-domain analogies). However, less often, different fields are also investigated (cross-domain analogies) to expand design possibilities.6,7
The latter approach is extremely useful, especially during the starting phase of the conceptual design, because it allows designers to discover new ideas for the creation of novel products.
Nevertheless, while design-by-analogy is often performed without a formalized methodology in industry, different design theories and problem-solving methods based on design-by-analogy can be found in the literature. For example, Synectics 8 is a structured approach to the creative problem-solving activity, based on analogical thinking. It identifies four different mechanisms that stimulate the creative thinking: direct analogy, personal analogy, symbolic and fantasy analogy.
The TRIZ theory is the more structured method. 4 The approach followed in TRIZ considers initially the abstraction of the problem, followed by the identification of the contradictions and then the research of a solution by analogy within the 40 inventive principles. Such principles have been extracted from a corpus of 2 million patents 4 and have been demonstrated to be stable with the passing of time. 9 Even if the inventive principles allow the designer to find the solutions to the contradictions, the methodology is complex and it has a long learning curve.
McAdams and Wood 3 provided a measure of the similarity of the products through the concept of functions and flows. Starting from the users’ needs, the functions that the product has to carry on are identified. After that, through an appropriate database, those products sharing a functional similarity are chosen for a crossover. McAdams explored only the electromechanical devices domain, neglecting other possible sources of inspiration.
Similarly, the method developed by Fantoni et al. 1 focused on the concept of function. They described a technique based on functional analysis (FA) and the analysis of functional synonyms and antonyms for the development of new ideas.
Another method that supports the design activity, stimulating creativity and reasoning by analogy at the same time is the WordTree design-by-analogy method. 2 This method systematically guides the designers in the identification of analogies and analogous domains thanks to the investigation of the lexical relationships among words (hyperonims, meronims, synonyms and so on). Conversely, Bonaccorsi and Fantoni 10 developed a wide and interconnected functional dictionary, where vertical and horizontal relationships are mapped through synonyms and antonyms. Such extended dictionary offers the possibility of designing alternative solutions using functional similarities or variants but it is limited to functional verbs and flows.
These latter two techniques are useful in giving inspiration to the designer, but they are not structured. A huge source of inspiration for new solutions comes from nature. Several studies deal with the systematic transfer of biological knowledge into the engineering domain. Indeed, biomimetic design “offers enormous potential for inspiring new capabilities for exciting future technologies.” 11 Several researchers have used biological analogies for the generation of concepts.12–15
In particular, through the concept of function, some of these works identify the biological elements to develop bioinspired concepts. For example, Shu et al. 16 combined functional modeling and biomimetic design, by incorporating biological phenomena into a function-based design repository.
Similarly, Nagel et al. 5 presented a general method for the functional representation of biological systems through systematic design techniques.
The systematic search for inspiration in the biological field has pushed the research toward the development of databases and software. For instance, Chacrabarti and Sarkar 17 created a software called IDEA-INSPIRE, which uses a database of natural and artificial systems classified by a verb–noun–adjective triplet. Vincent and Mann 9 constructed a condensed TRIZ contradiction matrix (biotriz matrix), which enables the designer to abstract useful design information from biological systems. Although the biomimicry allows designers to identify really innovative design solutions, this technique focuses only on living organism domain.
Robotic research has always shown a deep interest in bioinspired grasping principles: 18 one of the most interesting research activities is the gecko climbing system studied by Cutkosky’s team. The climbing robot they developed is based on Van der Waals’ forces and hierarchical structures, 19 while Matope and Van der Merwe 20 transferred the concept to a microgripper.
Methodology
In order to overcome fixation and explore lateral ideas, we approached the problem of designing new products using a crossover strategy (i.e. using design by analogy). The idea behind is to find, in common daily life, a source of novel ideas inspired by the objects used to carry on a desired function (hereafter named inspiring elements). A large database of these objects can be created in order to capture their behaviors, which concur to provide the researched functions. Each one of them can be described in functional terms (e.g. using the dictionary in the studies by Hirtz et al. 21 and Bonaccorsi and Fantoni 10 ) to enhance their retrieval). Unfortunately, even if powerful, design by analogy is a very low-structured technique. Therefore, instead of starting with the research of analogies, we propose a six-step method. Figure 1 shows the methodology.
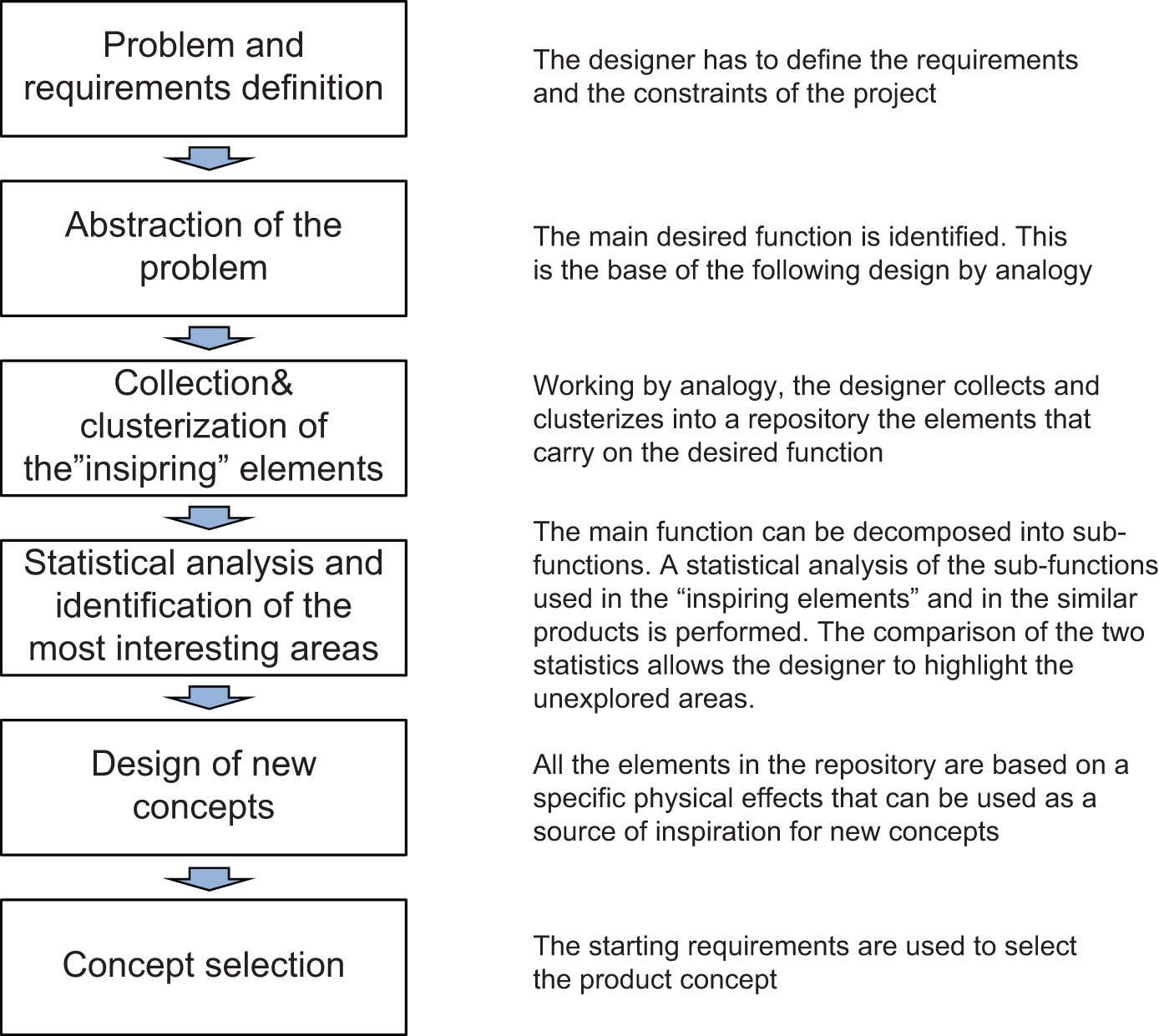
Proposed methodology.
In the following paragraphs, each step will be shown in detail through the design process of new grippers.
How to apply the method to the design of new grippers
Even if the method can be easily understood, we would like to apply it to a real case in order to better illustrate the procedure through its steps. The application is the design of new grippers. By applying the design by analogy heuristic at the problem level without using a structured method, we can find interesting sources of ideas in new industrial grippers or in robotic hands, but such an analysis looks much more like benchmarking than an inventive activity (Figure 2, left arrow). In fact, both the number and the diversity of the found analogies are reduced if compared to the more systematic analysis proposed here. For comparison, the reader can refer to the seminal study of Novitskaya, 22 where she attempts to demonstrate the similarity between grippers and some structures belonging to absolutely different technical systems. Even if the idea is correctly expressed and the case study describes a gripping device, the approach is far from being systematic.
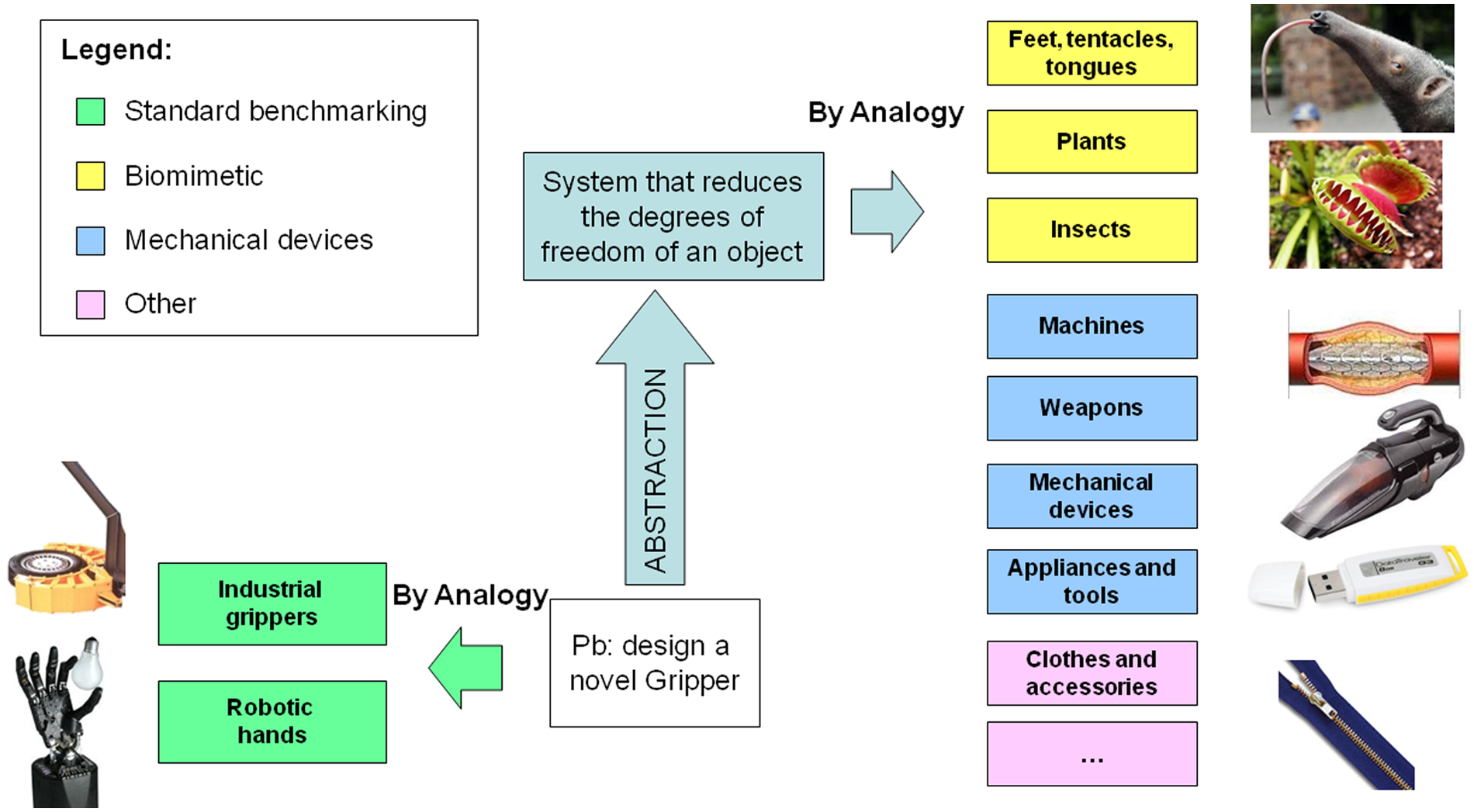
Sources of inspiration for design by analogy.
By abstracting (Figure 2, vertical arrow), and so generalizing the problem, the field of research can be enlarged. Abstraction plays a major role in the early stages of engineering design, and it is a valuable tool during the conceptual design phase. 23 It is also the first key step in TRIZ algorithm, 4 while it also plays a relevant role in functional decomposition.24–26
The abstracted problem can be described as follows: “to find a system that, when acting on the object (i), reduces the degrees of freedom of an object with respect to the system itself.” The research of solutions was carried out through several brainstorming sessions and several contributions developed independently by the researchers. The goal was to identify the living beings and nonliving things that, through different mechanisms, perform the researched functions (Figure 2, right arrow and clusters).
Working by analogy the following areas were explored:
Biology and botany (in a sort of biomimetic approach), varying from insects’ legs to animal trunks and tongues, investigating animal climbing systems or insects’ reproductive apparatuses or even plant glues or seeds shapes;
Appliances and tools, varying from snap-fits to locks, investigating gym devices as climbing cams or parachutes or even common daily life tools as umbrellas and epilators;
Weapons as harpoons, varying from hook to hand harpoon, investigating simple or expanding bullet or even arrow or broadhead arrow;
Clothes and accessories, varying from belts to laces, investigating hairclip or nose piercing or even zip or a button in a buttonhole.
Functional decomposition of systems that grasp objects
Whichever system is selected, standard gripper and robot hand, or novel “grasping” device, it has been analyzed in a formal way. First, for each gripper, hand, device or animal, a suitable reference was identified to clarify the functioning of the system of interest. This is important in particular to understand the correct behaviors, especially for biological systems, with which engineers have no familiarity. To make the analysis as rigorous as possible, a step-by-step top-down procedure based on FA has been chosen. As seen in session 2, different works resort to the concept of function, since it provides an abstract representation of the product. In engineering design, the definition or the comprehension of a system in terms of function is a fundamental aspect27–29 that helps designers in conceptualizing and evolving the design. FA helps the study of complex systems by breaking them down into simpler subfunctions.
During the 1960s in Germany, a catalog of effects, principles and solutions was developed to provide abstract representations of the functioning of objects, in order to help the designer in choosing the best solution.21,24
Later, several attempts to standardize the functional lexicon emerged in the literature.30–32 Even more structured are the proposals by Little et al., 33 who introduced the notion of functional basis, and Stone and Wood, 34 who continued on the same track combining the classification of functions in classes with the structure of a basis. These efforts of synthesis culminated in the reconciled functional base proposed by Hirtz et al., 21 who suggested a hierarchy of functions organized in three levels. Such taxonomy has been adopted in the present study.
Therefore, the decomposition moved toward the identification of the phases 35 occurring during the utilization of the gripper, the actions performed by the animal or the product’s phases of use. The identification of the phases makes it easier to create a detailed functional description. Then, each phase was split into elementary functions, and to obtain homogeneous functional decompositions (the flows are not considered in the analysis since the aim is to develop a tool able to expand design by analogy between different domains and flows play a secondary role in such analysis; flows variation and transformation have been described in the study by Bar-Cohen 11 ), phases were labeled using the functional dictionary of Hirtz et al. 21 Finally, each gripper was classified according to the physical effects involved during the functioning. 36
In particular, it is worth noting that the analysis of the elementary functions allows mapping both the main function and also those functions supporting the grasping. In order to reduce ambiguities, the handling based on grasping was split into standard phases, and all the systems (included animals, devices and so on) were dealt according to such a set of phases (see Figure 3).
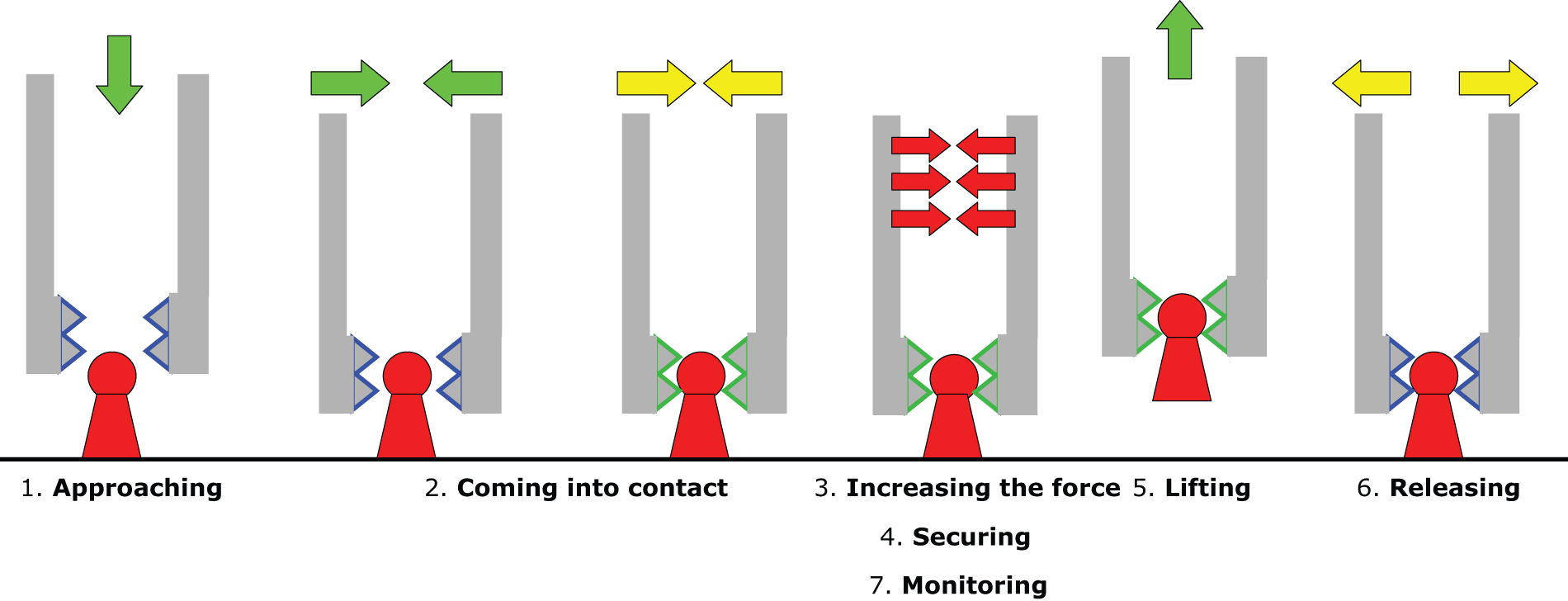
Standard phase sequences in assembly or goods handling (adapted from the study by Blanes et al. 37 ).
In general, parts grasping 37 consists of the following phases (shown in Figure 3 in the case of a mechanical two-finger gripper):
Approaching the object. The gripper is open, and the robot system positions the gripper close to the object;
Coming into contact. The gripper is actuated and its surface touches the object surface (in case of contactless handling the object is in the range of the force field generated by the gripper);
Increasing the grasping force. The grasping force has to reach a value able to provide a stable grasping;
Securing the object. The force stops increasing, when the object stops moving independently from the gripper;
Lifting the object. The gripper and the object are joined and the object can be lifted (if the payload of both the robot and the gripper allows it);
Releasing the object. At the macroscale, when the grasping force is removed, gravity helps to release the object. At the microscale, the problem is more complex; therefore, other releasing strategies have to be found; 38
Monitoring the grasp. Many different sensors (force and torque, stick-slip, contact sensors and so on) are used to monitor the contact and the effectiveness of grasping.
Phases like number 1 and 5 are usually performed by a robot or other handling system, while phase number 7 can be done both locally, at the gripper level, and globally, at robot or environment level (through fixed cameras).
Application of the method to the design of new grippers
Nowadays, grippers are changing toward a more and more complex design to accomplish the most various tasks. Even if research is pushing toward this direction, simple high-efficiency grippers are still studied and produced for common industrial operations. Actually, high performances usually imply high costs, which are not possible in a competitive industrial scenario. Because of this fact, high dexterous hands are mostly used in research activities or for particular manipulation cases, while simple and reliable grippers are intensively exploited in industry.
Figure 4 shows the space of automatic grasping devices. On the left side, different industrial grippers are shown, like vacuum cups and two-finger mechanical jaw. On the right side a few robots hands are presented, like Vassura’s hand or Waseda University Hands. 18
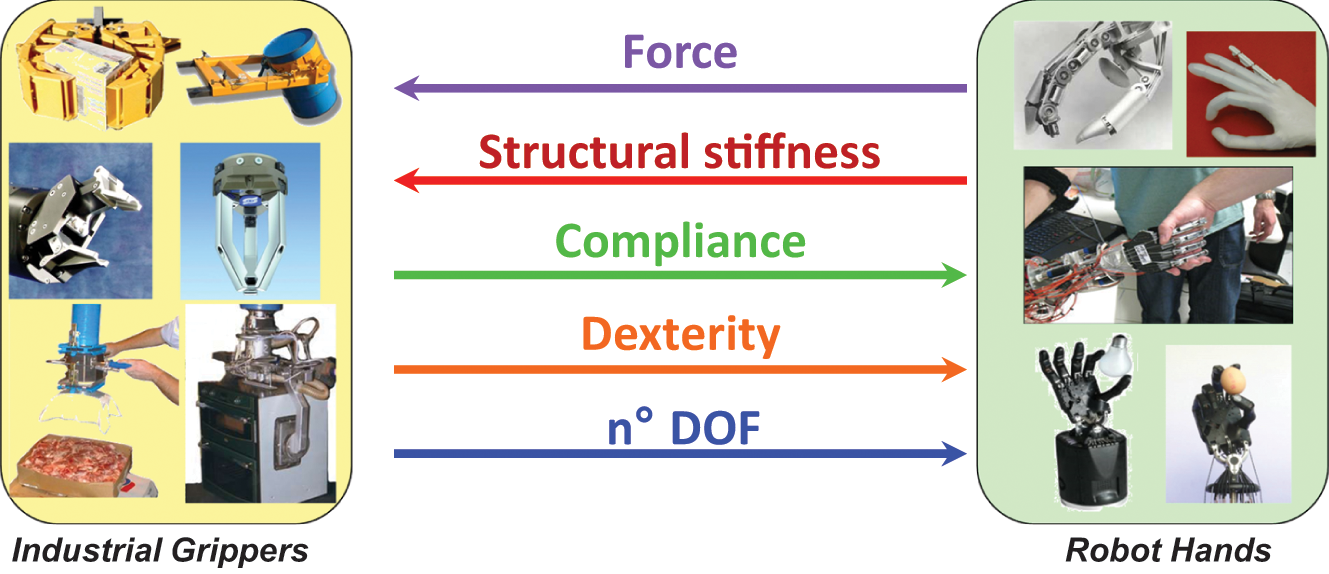
How parameters and performance vary from industrial grippers to robot hands.
The most important features for industrial grippers are the force, generally higher than in robotic devices, and the structural stiffness, which influences the quality of grasping, positioning and so on. 18 Moreover, the reduced number of DOFs increases the reliability of the gripper and reduces its cost. The robot hands, compared to the industrial grippers, have higher compliance and dexterity (mainly due to the increased number of DOFs) that allow the manipulation of objects in a human-like way.
“Nonconventional” grasping systems
The methodology presented was applied to create a database that supports the designer in inventing new grippers during the conceptual phase. As we stated earlier, in order to overcome a rigid and convergent approach to the problem, we decided to explore devices or living beings and nonliving systems that act (also for short time periods) as grippers.
Definition of gripper: Grippers are defined as
subsystems of handling mechanisms which provide temporary contact with the object to be grasped […] and ensure the position and orientation when carrying and mating the object to the handling equipment […]; the term “gripper” is also used in cases where no actual grasping, but rather holding of the object where the retention force can act on a point, line or surface […].
39
Therefore, it would be helpful to find other systems that are not classified as grippers and match such a definition. Hence, a database made up of about 150 elements has been created (www.centropiaggio.unipi.it/sites/default/files/Grippers%20by%20analogy.xls). This database contains the names of the “nonconventional” grippers and the relative functional decompositions of the grasping phases. The entries of the database are classified according to (1) the grasping mechanism (e.g. adhesion, grasping, pinching or punching) and (2) the fields to which they belong (e.g. biology, appliances and tools, clothes and accessories and weapons).
Examples of convergent suggestions in the database are seat belts, fish nets and mechanical devices; more divergent ideas are, for example, umbrellas, stents, car latches and so on. Moreover, even accidental and unwanted events as the nesting between springs or the tangling of trousers into gear systems or in the bicycle chain can be useful in inspiring novel solutions for grasping.
Figure 5 is a part of the database that shows elements satisfying the definition. For instance, during the use of a parachute, it contains and constrains the air (it is a sort of temporary gripper for air). Another example is the brake that grasps the wheel, decreasing the vehicle velocity by friction. One more interesting object is the stent that is inserted in the veins and arteries of the human body to counteract a localized flow constriction. Usually, it is passed into the narrowed locations and then it is inflated. Thus, the balloon pushes the metallic stent that crushes the fatty deposits, opening up the blood vessel and restoring the flow. Its functions of blocking the fat and holding the blood vessel in an open position satisfy the gripper definition.
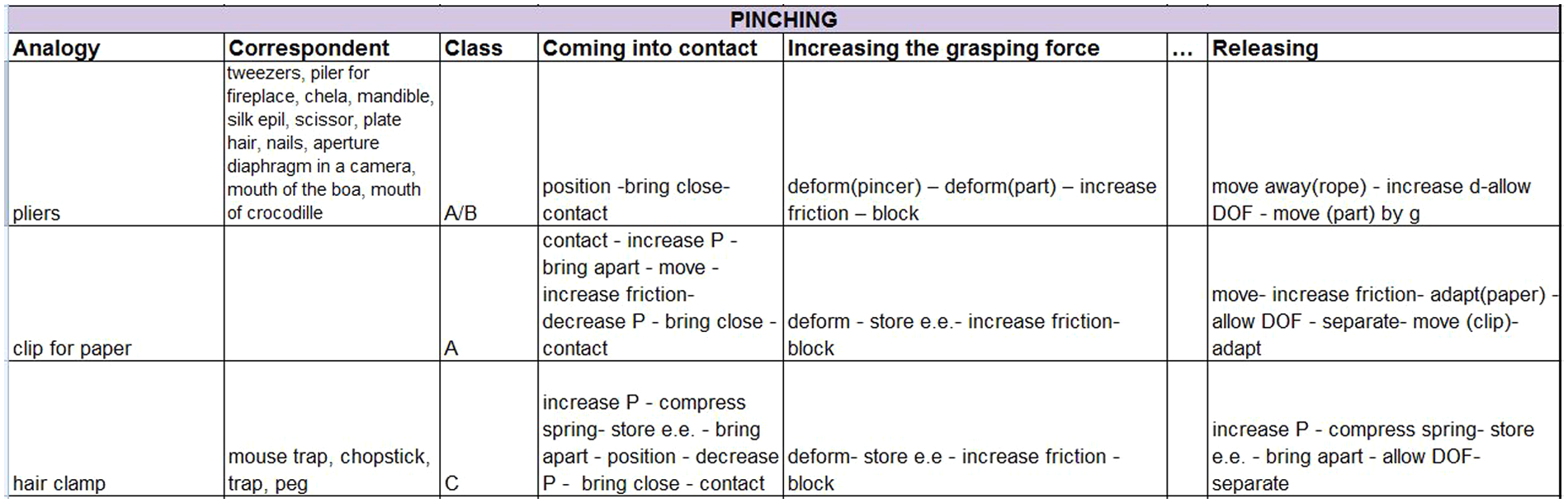
Screenshot of the database (full database at www.centropiaggio.unipi.it/sites/default/files/Grippers%20by%20analogy.xls).
Some entries of the database show the same functional decomposition; therefore, they can be considered identical, even if they are structurally different. These elements are in the column called correspondents. Indeed, the same functional chains can be carried out through different elements and even different physical principles. For example, a plug, a stent and a latch perform the same functions to block and to hold.
Occurrence analysis
Occurrence analysis for standard grippers
For each grasping principle, 40 one standard gripper was selected and analyzed through FA (Figure 6), since grippers exploiting the same grasping principle show almost the same behavior. As a note, the functions related to the lifting and realizing phases were skipped, since they are repetitive and mainly based on robot capabilities and gravity, respectively.
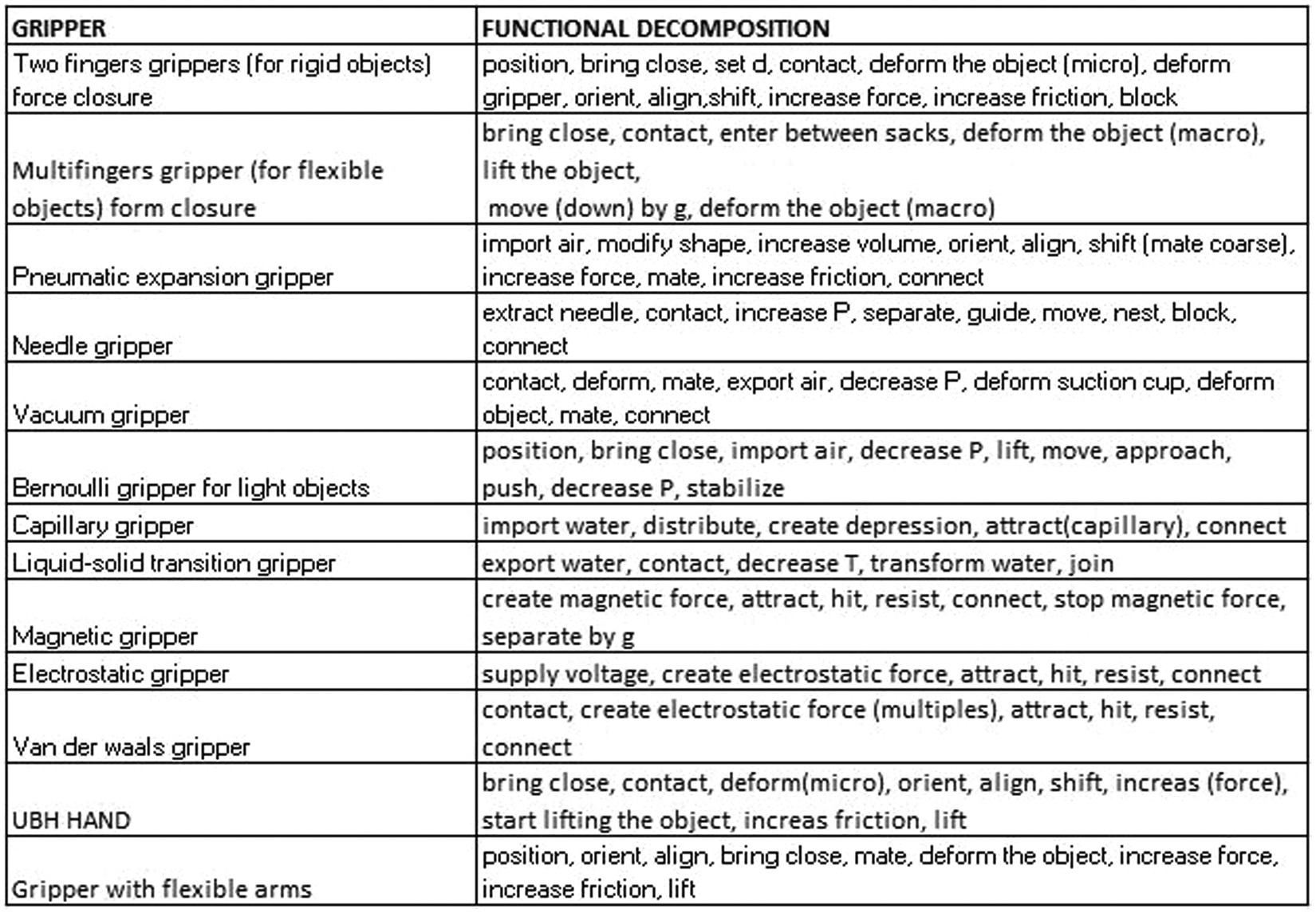
Functional decomposition of the main grippers.
Such decompositions can be considered as the baseline of the frequency analysis. The most occurring functions have been plotted in Pareto’s histogram, as shown in Figure 7. As expected, the most repeated functional verbs are those related to the grasping and handling phases (to position, to bring close, to align, to connect, to mate and so on). Some of them are peculiar to the grasping process, while others, such as to mate and to connect, show how grasping benefits from high coupling of gripper and object surfaces (often achieved through the deformability of the couple gripper/object).
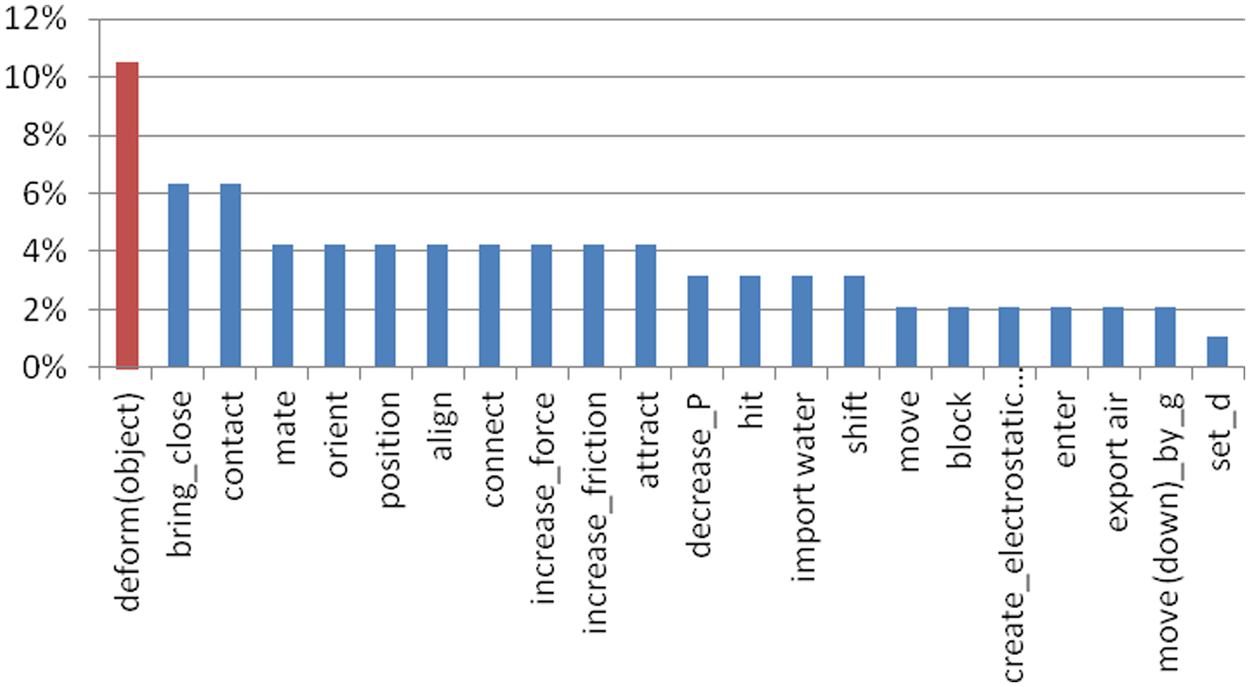
Pareto histogram of the most occurring functions.
Occurrence analysis for “nonconventional” grasping systems
Also for the nonconventional grippers, a frequency analysis has been performed, in order to identify where interesting changes emerge from the comparison of the two groups (conventional vs nonconventional). Figure 8 shows the results concerning the top 30 functions.
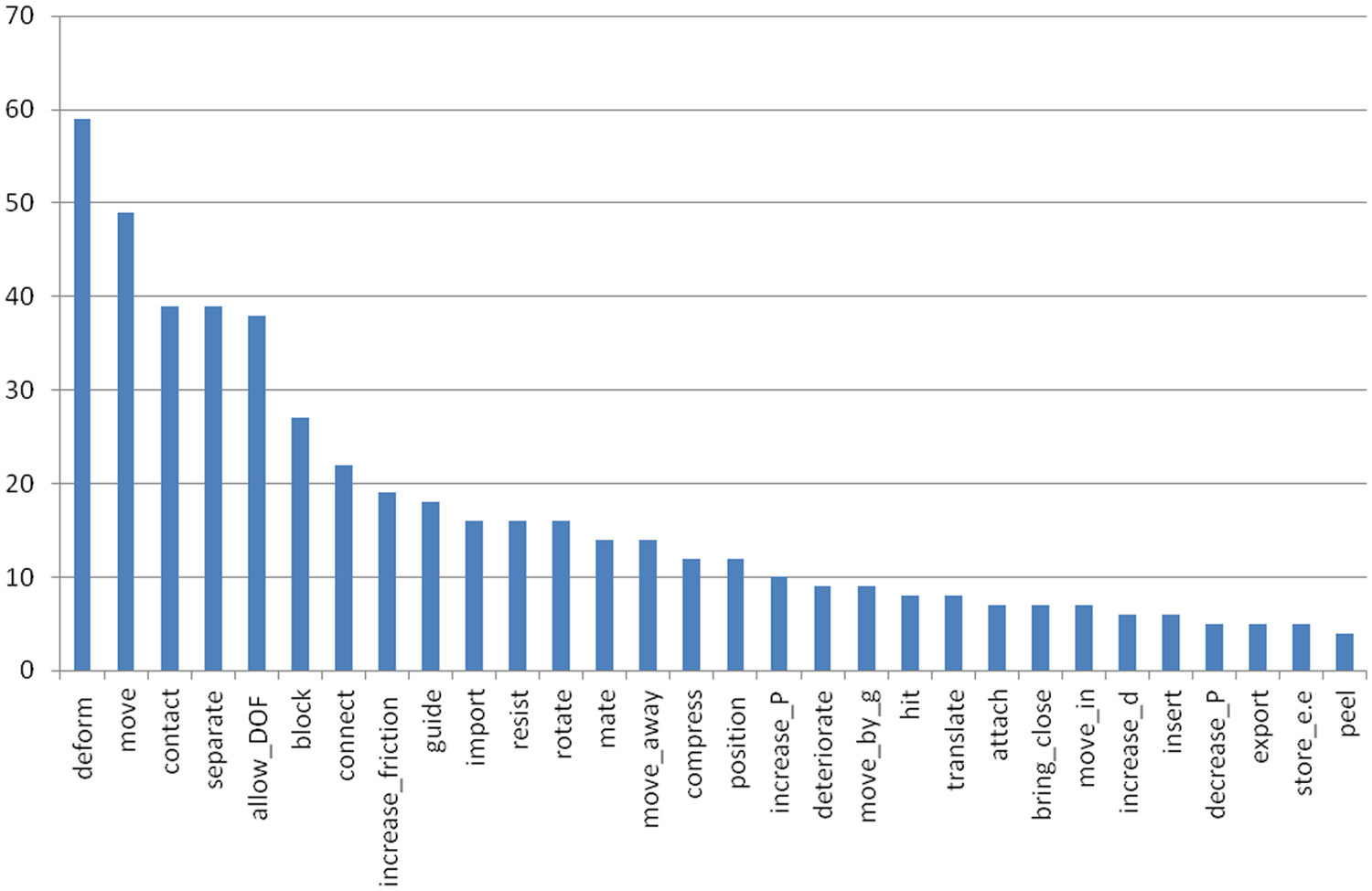
Pareto histogram of most occurring functions in “nonconventional” grippers.
In the case shown in Figure 8, the function “to deform” is split into two parts: gripper deformation and object deformation. The sum of gripper deformation and mating is relevant, and their synergy plays a key role (even more important than in conventional grippers). This is probably due to the presence of biological systems, where the coupling of grasping device and objects surface is necessary to increase reliability and decrease the amount of energy requested for the grasping (that, for example, is the base of the climbing of geckos, tree-frogs, squirrels and insects).
The exploitation of a high coupling between gripper and object is, and probably will be even more in future, an interesting research area in robotic grasping. However, its investigation is out of scope with respect to the aim of this article.
An industrial case study
Robotic unloading of goods from containers
Automation of mass goods has become more and more important for logistic companies. Reasons rely on both process cost and workers’ health issues. Especially, the handling of heavy and deformable materials is one of the most challenging problems for this sector. The European Union (EU) has approved the RobLog project 41 whose main goal is the automatic unload of containers. The method presented earlier was applied to the development of the grasping part of the robot. Because of the wide variety of goods to be handled, one of the main goals is to set the specifications, both of the goods to be handled and of the grasping system. For the specific case of study, the gripper has to grasp jute coffee sacks, the requirements of which are as follows:
R1: weight: 25 kg/75 kg;
R2: maximum dimensions (mm): 600 × 300 × 900;
R3: material of the sack: jute (porous);
R4: contents of the sack: coffee beans (deformable);
R5: maximum damage admissible: 200 mm2.
The gripper itself also has to respect some specifications, as follows:
R6: weight:<4 kg;
R7: time for grasping/release:<3 s.
Some of the specifications may be satisfied depending on the number of grippers used (R1–R5). Moreover, some of them are requirements of the project, so they have to be respected (R1–R4).
Intrusive grippers
At present, two workers pierce the jute sacks with four hooks to grasp and handle them. The hooks, whose average diameter is 4 mm, leave small acceptable holes on the jute sack.
Intrusive grippers are frequently used in sacks handling or food handling. The Schmaltz Gripper18,42 is a gripping system used for the handling of flexible, nonrigid components or materials. It is also used to grasp objects that cannot be grasped using vacuum, for example, fabric sheets, textiles and foam materials. Its gripping behavior is achieved by the intrusion of the needles within the fibers of the object. The same principle has been also adopted in food industry to handle frozen fillets of fish or meat. 43
Kazerooni and Foley 44 use two rotating rollers that are able to entangle the textile of the sack. The two rollers come into contact with each other and with the sack to be grasped. The rollers start counter-rotating and the sack textile is dragged by the friction forces. When a certain quantity of the sack is between the rollers, the sack can be lifted. The working principle is similar to what happens when trousers come into the bicycle chain.
Kirchheim et al. 45 described a gripper supplied with four claw systems with three concentric claws per system. The claw systems move vertically and rotate at 90°. The edge of the claw pierces the jute, while the roto-translational motion produces the form closure. The gripper is really tough, but it requires powerful actuators.
This very short state of the art in coffee sacks handling showed that the four grippers listed earlier are similar to fish-hooks, forks, pull-over mill and a corkscrew, respectively.
Designed grippers
The database (www.centropiaggio.unipi.it/sites/default/files/Grippers%20by%20analogy.xls) has been clustered, and a limited number of concepts have been extracted, prototyped and tested on real-scale coffee sacks. Moreover, they exploit principles, which are more reliable than the ones of the existing grippers and better interface with the jute sacks.
Table 1 shows the concept scoring 24 among the new designed grippers and some existing grippers. The total scores for each concept are obtained through the following formula
Concept selection.
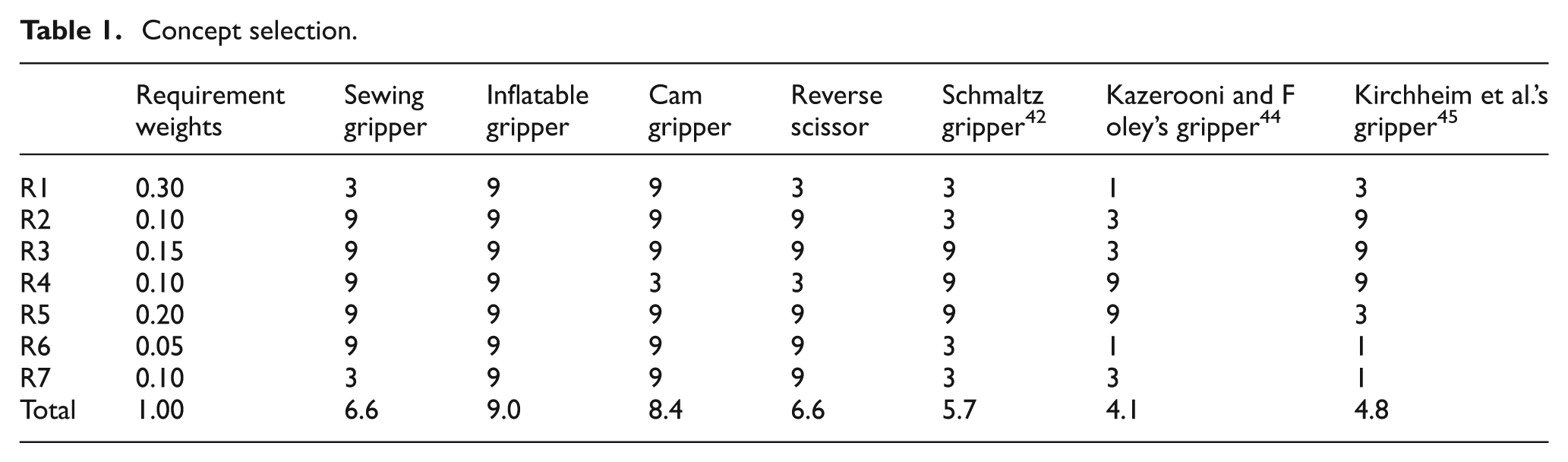
where wi is the weight of the subcriterion i, ri, j is the rank (in logarithmic scales 1, 3 and 9) given to the concept j and n is the number of subcriteria.
Figure 9 presents the developed selected grippers, which all respect better requirements from R1 to R7.

Some of the devices developed.
Sewing gripper
A helical metallic wire is sewn, thanks to an electric motor, on the jute sack. Once enough spires are inserted into the material, the sack can be pulled out. To release the objects, the spring is unsew by the electric motor. This gripper, even being intrusive, does not damage the jute significantly, since the small dimension of the multiple holes created there.
Inflatable gripper
It is an intrusive gripper that changes its geometry to achieve the grasping. A deformable membrane, surrounded by a braided sleeve, is inflated to switch from the insertion/extraction to the grasping configuration. The working principle is similar to the cited stent. The main advantage of the pneumatic air actuation is velocity and reliability. As far as the authors know, it is not much used in the grasping of deformable objects.
Cam gripper
The grasping is achieved thanks to the contact between two or more metallic retractable shelves and the inner surface of the sack. The gripper is inserted into the object with the shelves in the retracted position, and then they are elongated and the object is pulled. This gripper presents a high-reliable grasp and small dimensions.
Reverse scissor
A rod with two shelves aligned with its axis is inserted into the object. Then, the shelves are rotated and blocked in an opened position. The main advantage (demonstrated by the use of a bigger prototype) is the reliability of such a grasping system. Figure 9 presents some of the devices developed.
All the prototyped grippers (except the reverse scissors gripper that was made in acrylonitrile butadiene styrene (ABS) by rapid prototyping) demonstrated good grasping capabilities and a maximum pulling force varying from 200 to 350 N. The holes generated into the jute sack remained within the specifications even if a miniaturization process is necessary in the case of inflatable gripper and in general can be appreciated also in the other devices.
Conclusion and future studies
In this article, a systematic methodology based on abstraction and design by analogy has been presented. Starting from the problem abstraction, the method identifies the “inspiring” elements, which are able to solve the general problem. Then, the method locates them in a suitable database. In general, they are the things or living organisms that perform the desired abstract function. Thanks to the abstraction process, the number of the elements is higher and their span is wider than in standard design by analogy approaches. The database contains the detailed functional decompositions of such elements (that perform the macrofunction of grasping in a particular way). This method allowed an extension of the solution space at both theoretical and practical levels.
As a case study, we chose the design of new grippers for the automatic unloading of coffee sacks in containers. Four novel concepts and their prototypes have been shown to demonstrate the diversity of the alternatives obtained through the method.
The results we achieved may be interesting for the following three reasons:
From a methodological point of view, the approach can be extended to other fields and the method can be used as a creativity support during the design phase;
From the grasping side, it is possible to note that the grasping phase is highly affected by the ability of the gripper surface to couple with the object surface. The study of such adaptable surface can be the key to enhance (standard) gripper performances;
Abstraction plus design by analogy makes possible to conceive other grippers also in different fields, as for instance the grasping of boxes, tires and pottery. The database (http://www.centropiaggio.unipi.it/sites/default/files/Grippers%20by%20analogy.xls) can be used as a source for suggestions or even extended in order to enlarge the design space for grasping and handling systems.
The main limit of the approach can be found at the level of abstraction. Actually, too much abstraction can lead to too many possible concepts, which cannot be practical in reality, due to the difficulties in their selection. However, abstraction seems still a powerful tool, in order to overcome fixation and the block of creativity.
Footnotes
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This study was supported by RobLog Project (FP7 ICT-270350) and LILIT Project (PAR FAS REGIONE TOSCANA Linea di Azione 1.1.a.3).