
Abstract
Posture alignment is a basic process for the joining of large-size components of aircraft, while posture evaluation is the first problem to be solved for posture alignment. The current posture evaluation method is dependent on advanced measurement equipments, which is not favorable for the wide application. Aimed at the shortcomings, this article puts forward a kind of posture evaluation method for aircraft wing. In the method, a simple measurement system composed of several linear displacement sensors is constructed, which can realize the rapid measurement of the wing posture. Then, the wing posture evaluation problem is transformed into a registration problem between space points and surface. Based on the iterative closest point algorithm, the wing posture evaluation algorithm is presented. An industrial example is presented to validate the proposed method, and the results suggest its feasibility.
Keywords
Introduction
As the critical component for aircraft with aerodynamic configuration requirements, the wing’s posture accuracy plays an important role in the manufacturing quality of aircraft. In order to ensure the assembly accuracy requirements of the wing, it needs to accurately adjust the wing posture during the joining between wing and fuselage, while the measurement and evaluation for the wing posture are the foundation to realize the process. The general process of posture evaluation can be divided into two aspects: (1) getting measurement data for the target components through specific measurement systems and (2) calculating the posture parameters with an algorithm. There are many research works on these two aspects, and we survey them as follows.
As for the former, Benoit and Bernard 1 introduced a kind of measurement-assisted assembly (MAA) system to complete the measurement and adjustment of wing posture, and the system has been successfully applied in the airbus assembly. Maisano et al. 2 discussed two distributed large-volume measurement systems, the mobile spatial coordinate measuring system and the indoor global positioning system (GPS), to give some helpful guides for the application of these systems. Jamshidi et al. 3 reviewed the application of large-volume metrology in the aircraft industry and used a large-size aircraft wing to illustrate the automatic metrology-assisted assembly process. Muelaner et al. 4 provided an overview of the important selection criteria for typical measurement processes and presented some novel selection strategies, which are helpful in actual application. Jayaweera et al., 5 Jayaweera and Webb 6 and Muelaner et al. 7 described a measurement-assisted robotic assembly for aerospace applications. Galetto et al. 8 and Franceschini et al. 9 proposed several novel approaches for large-scale metrology.
As for the latter, Frederik and Hanebeck 10 proposed a new closed-form solution to posture evaluation based on range measurements and decoupling position and orientation. The proposed method can improve the accuracy of calculation. Fischler and Bolls 11 applied perspective-n-point to solve the posture parameters of targets relative to the camera. Lowe 12 proposed the least-squares model to calculate the posture parameter. Vincze et al. 13 systematically discussed the posture calculation method based on laser tracking, which has enhanced the motion accuracy of robot end effectors. Edouard and Shingo 14 proposed dynamical models for position measurement with global shutter and rolling shutter cameras, which can timely and accurately capture the target posture. Hiroyuki and Toshihiko 15 adopted two sets of electronic cameras with high performance to compose the measurement system and calculated the target posture with the principle of spatial angle intersection.
Based on the analysis of the literature, we can see that large-volume metrology has been widely used in aircraft manufacturing, and these posture evaluation methods can achieve a high accuracy. A metrology-assisted assembly system plays an important role in improving the level of automation and flexibility of aircraft assembly. Nevertheless, there are still a few issues that need to be addressed. For example, although the currently used metrology systems, such as mobile spatial coordinate measuring system and indoor GPS, can achieve a high accuracy, the cost of such systems is relatively high for common use and the process of using such systems is complex. It will benefit from developing a simple measurement system. In this article, a simple measurement system that is composed of several linear displacement sensors is constructed for the measurement of aircraft wing. Then, the wing posture evaluation problem is transformed into a registration problem between space points and free surface. Finally, it is realized using iterative closest point (ICP) algorithm.
Problem formulation
As shown in Figure 1,
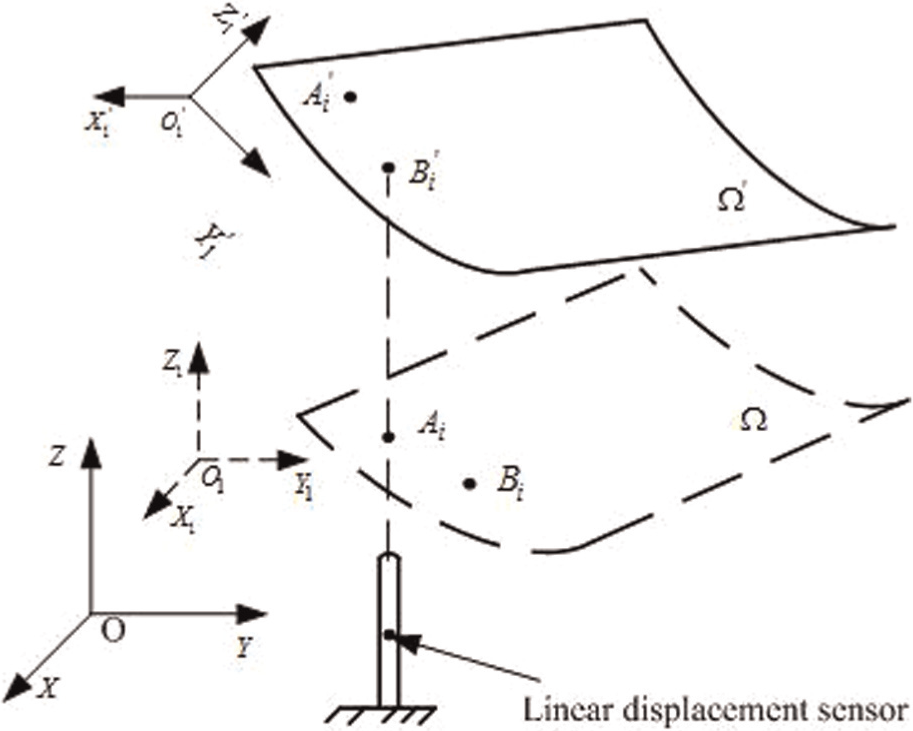
Illustrative diagram of the measurement system.
The wing posture is expressed by six parameters, i.e.,
where
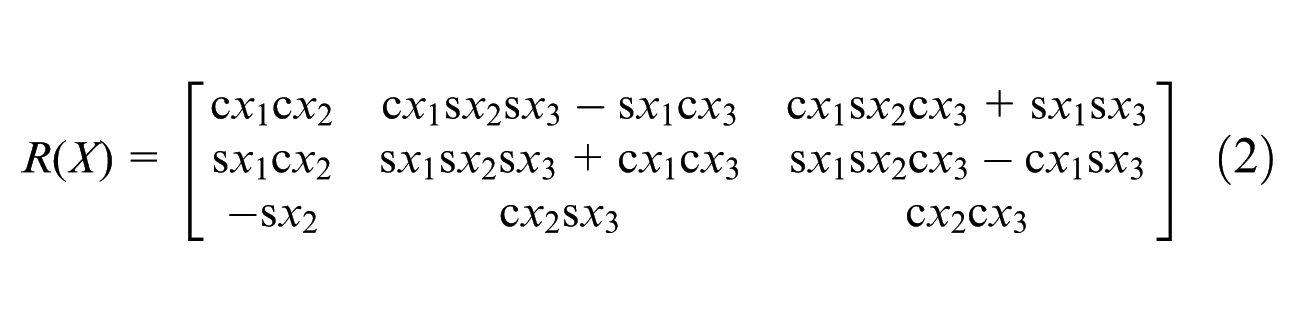
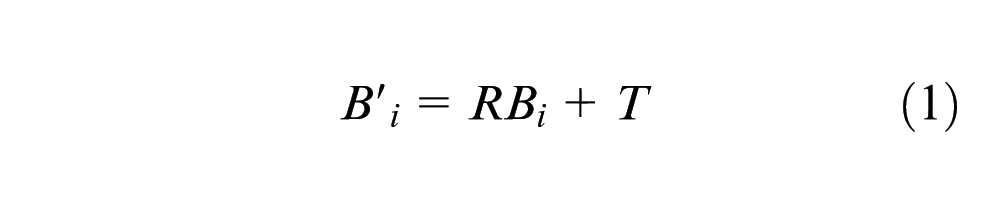
The posture evaluation algorithm
The process of solution formula (1) can be transformed into two steps: (1) searching for
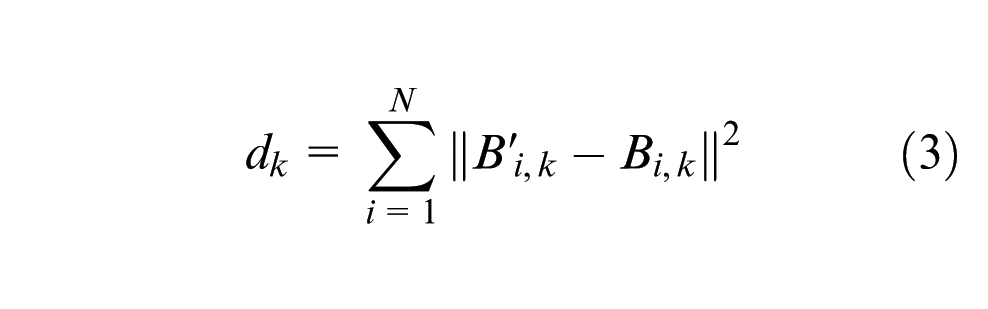
When
Case study
The method proposed in this article has been integrated in CATIA&DELMIA R18 and successfully applied in the assembly of a wing. With the background of this kind of wing, this article has designed a simulation model to verify the validity of the algorithm. Figure 2 shows the simulation model including the wing and fixture. The wing can be divided into three components—XX_1, XX_2 and XX_3—which will be joined together in the fixture. The fixture includes several linear displacement sensors and adjustment mechanisms. The linear displacement sensors are used to measure the posture, while the adjustment mechanisms are used to adjust the wing posture. Take XX_1 as an example; the theoretical posture of XX_1 is
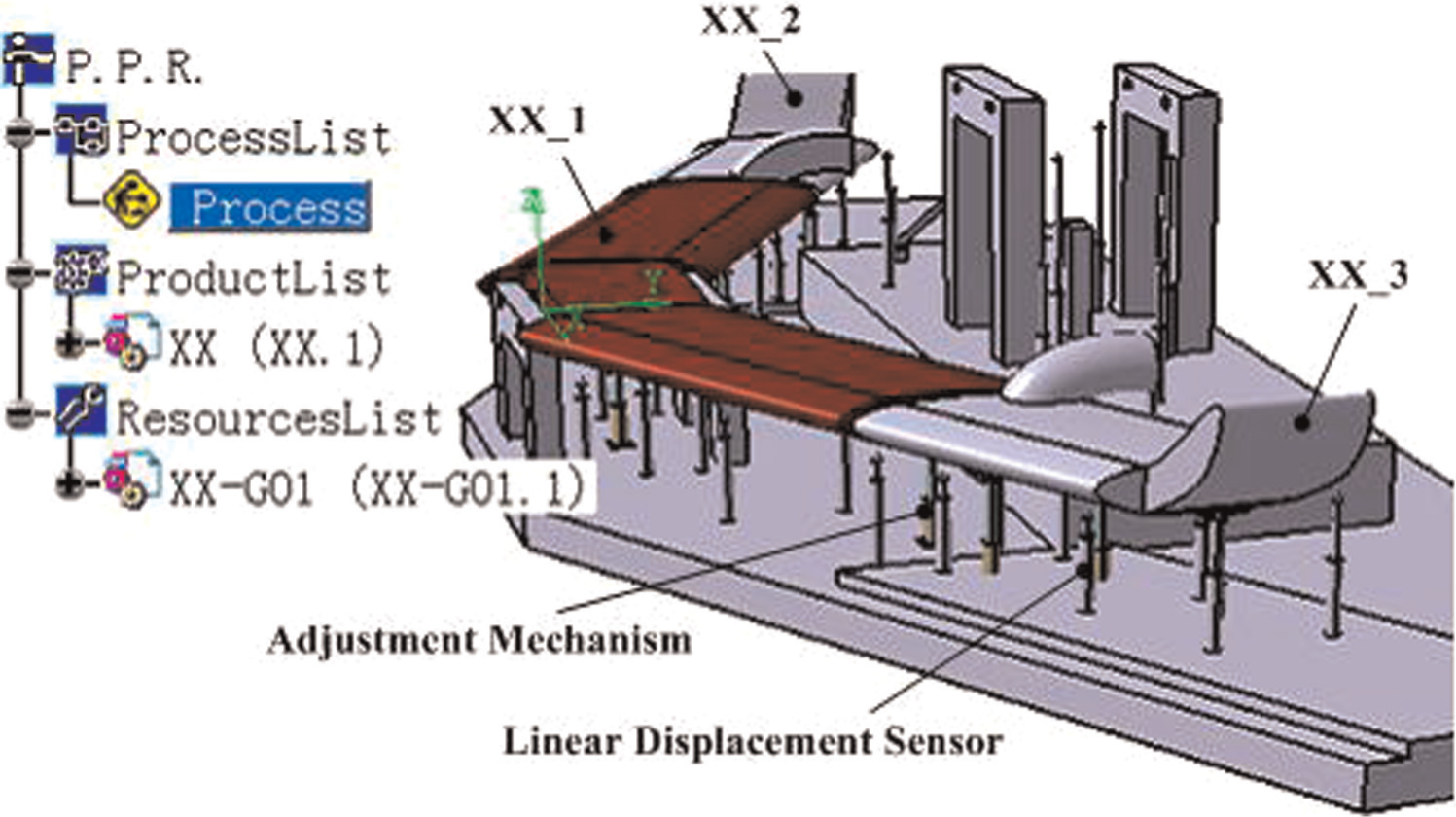
Verification system of the proposed method.
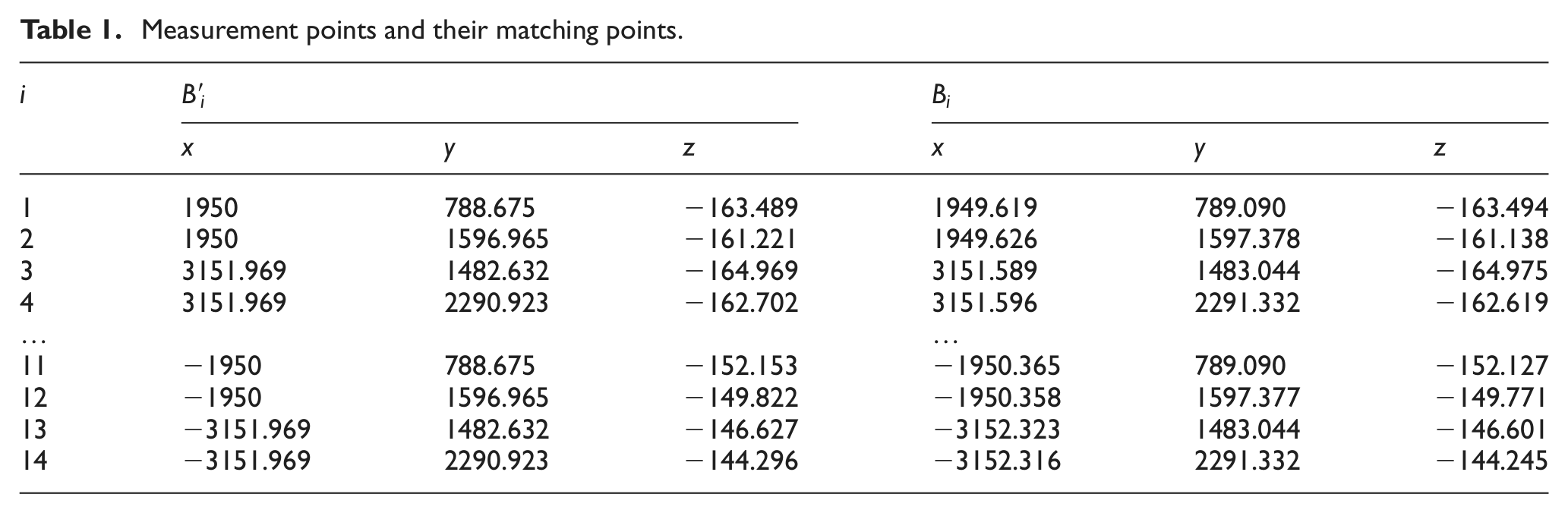
Measurement points and their matching points.
Results.

Conclusion
With the construction of a simple measurement system, this article adopts ICP algorithm to realize the wing posture evaluation. Integrating the method into CATIA&DELMIA can realize the application in the enterprise. Compared with existing methods, the method proposed in this article has the following advantages:
The measurement system is composed of several linear displacement sensors with simple design, convenient use and low cost. In the actual application, it can increase or decrease the number of linear displacement sensors according to the wing size.
ICP algorithm is used to realize the posture evaluation, which is a mature algorithm and easy to realize. The accuracy can satisfy the application requirements.
Footnotes
Funding
The work was supported by the National Key Technology Research and Development Program of China, the Fund of National Engineering and Research for Commercial Aircraft Manufacturing, the Defense Industrial Technology Development Program and the University-Industry-Science Partnership Project of China Aviation Industry (CXY2010XG22).