
Abstract
The aim of this research work is to characterize the mechanical behavior of multilayered carbon-fiber–reinforced polyphenylene sulfide composites with the application to assembly process of nonrigid parts. Two anisotropic hyperelastic material models were investigated and implemented in Abaqus as a user-defined material. An inverse characterization method was applied to identify the parameters of these material models. Finite element simulations at finite strains of a flexible composite sheet were carried out. Numerical results of sheet deformation were compared with the experimental results in order to evaluate the appropriateness of the material models developed for this application.
Keywords
Introduction
The quality control of products is one of the main aspects for manufacturing companies to consider in technological developments. At the end of a manufacturing process, the produced part must satisfy a level of required tolerance. In aerospace and automotive industries, manufactured nonrigid (or flexible) parts feature large dimensions with respect to their thickness, and they may have a different form in free state than the design model due to geometric variations, gravity loads, and residual stress. For example, the skin panel of an aircraft can be slightly warped in free state, making it possibly unacceptable for assembly process. 1 Therefore, one of the most important problems faced in quality control is inspecting the geometry of nonrigid parts prior to assembly process. During geometric inspection, special fixtures in combination with coordinate measuring systems are needed to compensate for shape changes of nonrigid parts. This process is usually costly and very time-consuming. 2 For instance, Figure 1(a) and (b) shows an aerospace panel in free state and constrained on its inspection fixture set before the measurement process.
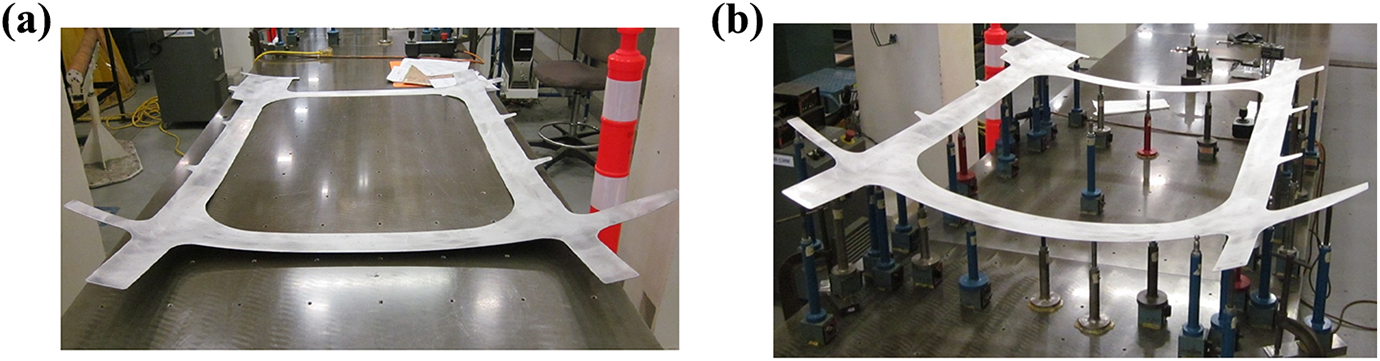
An aerospace panel: (a) in free state and (b) constrained on its inspection fixture set. 7
For the time being, it is widely considered that a virtual inspection method, which is usually performed by numerical simulations to compensate for flexible deformation of nonrigid parts in free state, would significantly reduce the inspection time and cost. 3 All inspection methods proposed so far are limited to linear elastic isotropic materials with well-known characteristics. 1 –7 Nowadays, the use of parts made of composite materials is progressively growing, especially in aerospace industry. However, up to now, there is no virtual inspection method that was developed for nonrigid composite parts, at least to the best of our knowledge. The reason is that the anisotropic nonlinear deformation behavior of nonrigid composite parts is much more complicated than that of linear isotropic elastic materials. Therefore, the deformation of composite parts could not be simulated correctly by finite element analysis without an appropriate material model for this purpose. A deep understanding of the behavior of nonrigid composite parts is not only very challenging but also very important for various applications such as developing specific virtual inspection methods for nonrigid composite parts.
It is remarked that the hyperelasticity gives an appropriate framework for numerical modeling of large deformation. In the last decades, the isotropic models have been developed to characterize the large deformation behavior of materials such as rubber-like materials (e.g. Mooney–Rivlin models 8 and Ogden models 9 ). There has been an increasing interest in the development of hyperelastic formulation for anisotropic materials because of its numerous industrial applications. A framework based on structural tensors for constitutive modeling of fiber-reinforced composites was established by Spencer. 10 This approach was successfully used in modeling of fiber-reinforced composite behavior. Pham et al. 11 developed a transversely isotropic hyperelastic model to present the material behavior of glass-fiber–reinforced thermoplastic under large deformation of thermoforming process. In 2009, Aimène et al. 12 published an article in which they proposed a hyperelastic anisotropic material model and achieved good numerical simulation for the hemispherical punch forming. Peng et al. 13 proposed an anisotropic hyperelastic constitutive model and demonstrated that it is suitable for modeling the large anisotropic deformation of a reinforced composite in double dome forming process. Recently, Gong et al. 14 have successfully employed a hyperelastic constitutive model to simulate the behavior of glass/polypropylene prepregs during thermoforming process. The purpose of this article is to implement a hyperelastic shell to capture the large deformation behavior of a nonrigid composite part with application to the assembly process. It is also noted that several authors have implemented models of hyperelastic shell into finite element codes. Gruttmann and Taylor 15 derived a rubber-like constitutive material model for membrane shells using principal stretches. Weiss et al. 16 and Prot et al. 17 developed a generalized approach for transversely isotropic membrane shells. Itskov 18 derived an orthotropic hyperelastic material model for membrane shells with application to biological soft tissues and reinforced rubber-like structures. Tanaka et al. 19 succeed to implement shell element for woven fabric composite materials with two families of fiber. These proposed methods were developed for fiber-reinforced composite materials or biological anisotropic materials that are generally characterized by low stiffness and large strains during the deformation. It was observed that the behavior of nonrigid composite parts in aerospace assembly process is quite different from the abovementioned material types. During assembly process, nonrigid part undergoes essentially large bending deformation due to geometric variations, gravity loads, and residual stress. In the literature, there exist very few studies investigating the behavior of nonrigid composite parts in assembly process. Therefore, the determination of a material model together with its parameters which is capable of capturing the large anisotropic deformation of nonrigid composite parts is the main purpose in this current research.
In this aticle, two strain–energy functions were studied for incompressible orthotropic hyperelastic material models able to capture the behavior of flexible fiber-reinforced thermoplastic composites (FRTPC). These models were implemented in the user-defined material (UMAT) subroutine of Abaqus for finite strain shell elements. The multilayered carbon-fiber–reinforced polyphenylene sulfide (CF/PPS) composite material, in which each layer is reinforced by two families of carbon fibers, was used in this study. In the modeling work, each layer was considered as an orthotropic material characterized by a strain–energy function. Material characterization works were carried out in order to identify the parameters of strain–energy functions. These material parameters were then used to simulate the deformation for the load test using a ball load applied on a large sheet of multilayer FRTPC. The deflections of the composite sheet predicted by numerical simulations performed with Abaqus were compared with the experimental data obtained from the load test in order to evaluate the capability of each material model used in this study.
Material model implementation
Generalized orthotropic hyperelastic material model for incompressible thin shells
In the present study, each point of the solid body

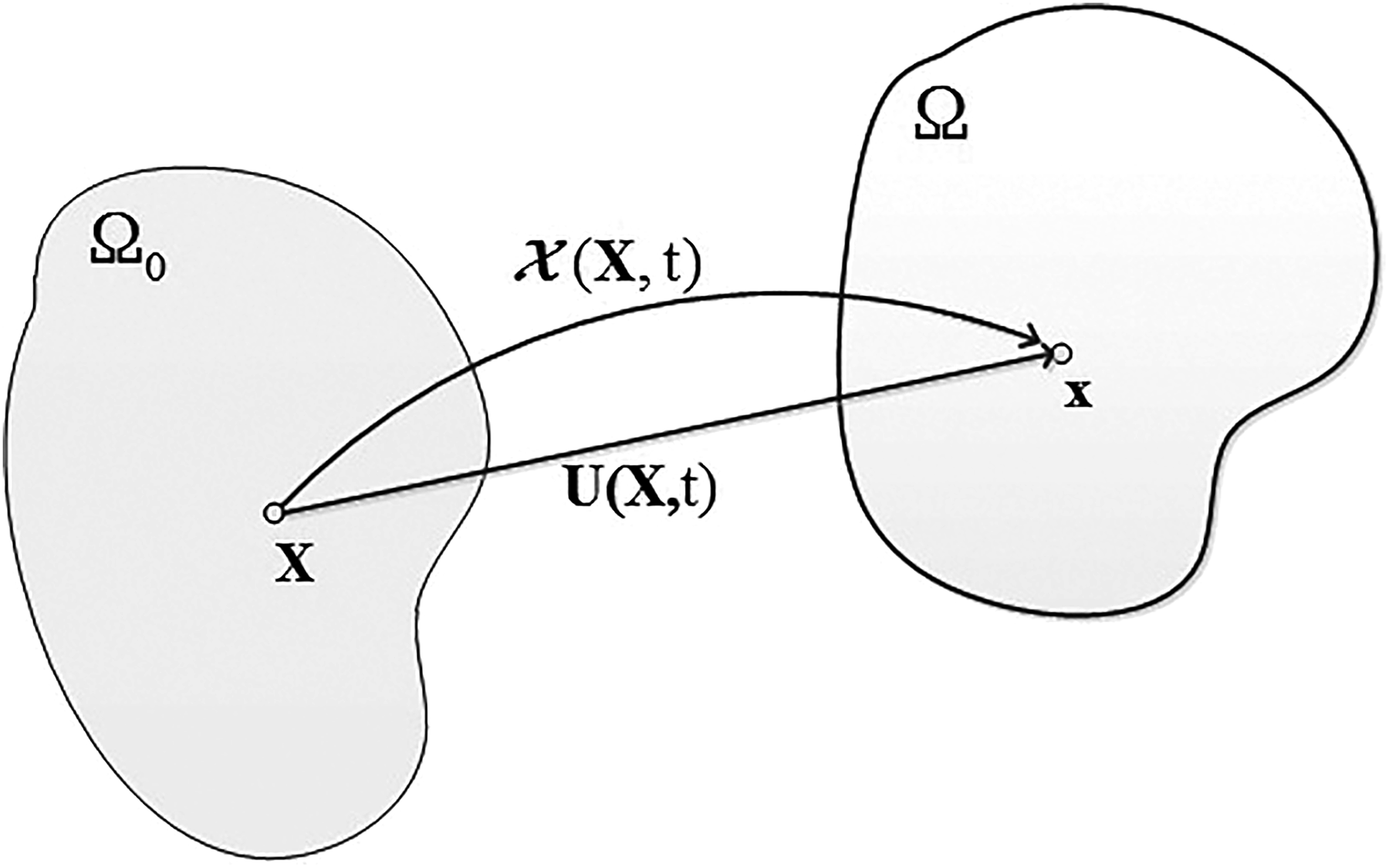
Motion of a continuum body.
For incompressible materials,

The right Cauchy–Green deformation tensor is defined as

Herein, Ψiso denotes the isotropic stored energy, and


where θ1 denotes the angle between

The mechanical behavior of the material is determined by the relationship between the second Piola–Kirchhoff stress tensor

For incompressible orthotropic materials, the strain–energy function in equation (6) can be stated as a function of invariants of

where the scalar p serves as an indeterminate Lagrange multiplier and five different invariants are defined by

where I4 and I6 represent the square of the stretching of fiber along their initial directions

where the symbol ⊗ denotes the tensor product,

In the case of plane stress, the stress component S33 vanishes. Therefore, the scalar p is obtained as follows:

where C11, C22, and C33 are the components of right Cauchy–Green tensor
where

and I is the fourth-order identity tensor defined as

Strain–energy functions for CF/PPS materials
In this study, the mechanical response of CF/PPS material is represented by orthotropic incompressible hyperelastic models. PPS material is characterized as an isotropic matrix, in which carbon fibers are embedded. Carbon fibers are characterized by an exponential-type stress–strain behavior in the fiber direction. Two strain–energy functions were proposed and implemented for the incompressible CF/PPS material based on the polyconvexity conditions proposed by Balzani et al. 21 The first proposed model is a modified function of a Holzapfel–Gasser–Ogden model. 22,23 The neo-Hookean model was used to determine the isotropic response of the matrix part. For the mechanical response of two families of carbon fibers, two exponential functions in terms of invariants were used. The strain–energy function of this model has the following form:

where M1, k1, k2, k3, and k4 are the parameters of the strain–energy function in equation (16). The second proposed model uses the same energy function for the anisotropic part as in the first model, and the isotropic part is a function in terms of the invariants I1 and I2 11 as follows:

where M1, M2, M3, k1, k2, k3, and k4 are the material parameters of the strain–energy function in equation (17).
Implementation in Abaqus/Standard UMAT
Several authors were successful to implement strain–energy functions into Abaqus through the UMAT subroutine.
17,19,24,25
In this article, the material models in equations (16) and (17) were implemented in Abaqus/Standard using the UMAT procedure. Abaqus requires only components of the Cauchy stress and the tangent stiffness matrix. The Cauchy stress tensor is determined by the push-forward operation of the stress tensor

Based on Abaqus/Standard 6.13 documentation, 27 the Green–Naghdi stress rate is used for shell and membrane elements. The elasticity tensor C∇ related to the Green–Naghdi stress rate is required for Abaqus user-defined subroutine and is computed as

where Λ is a material-independent fourth-order tensor defined by Simo and Hughes, 28 and Co is the elasticity tensor related to Zaremba–Jaumann objective rate defined as

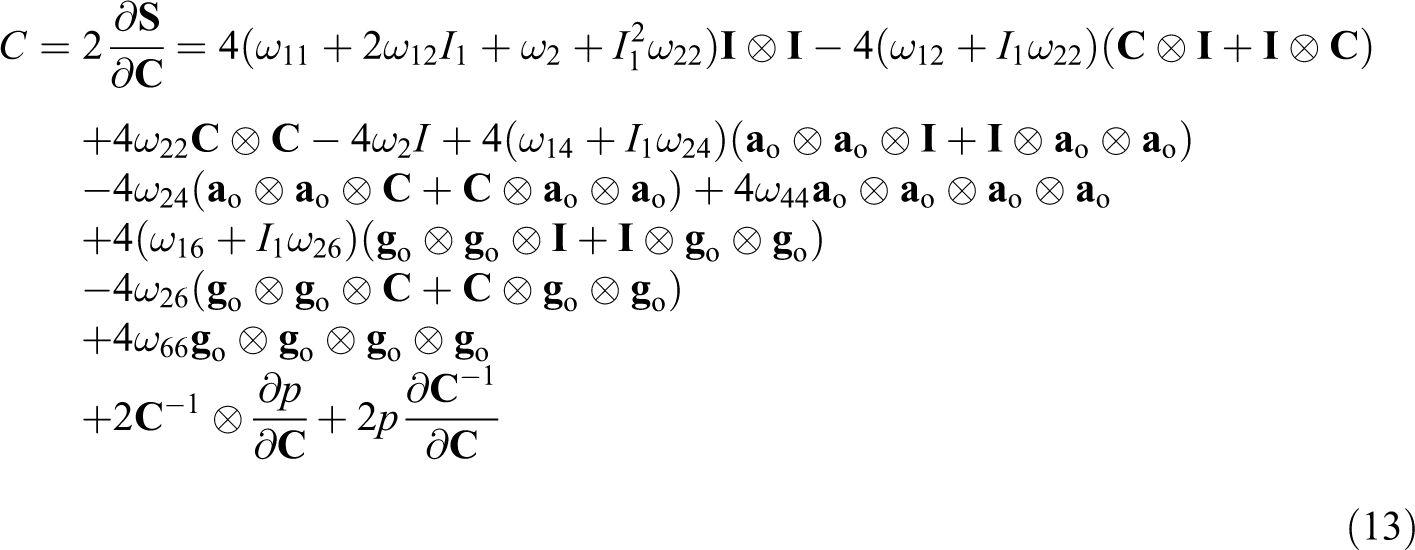
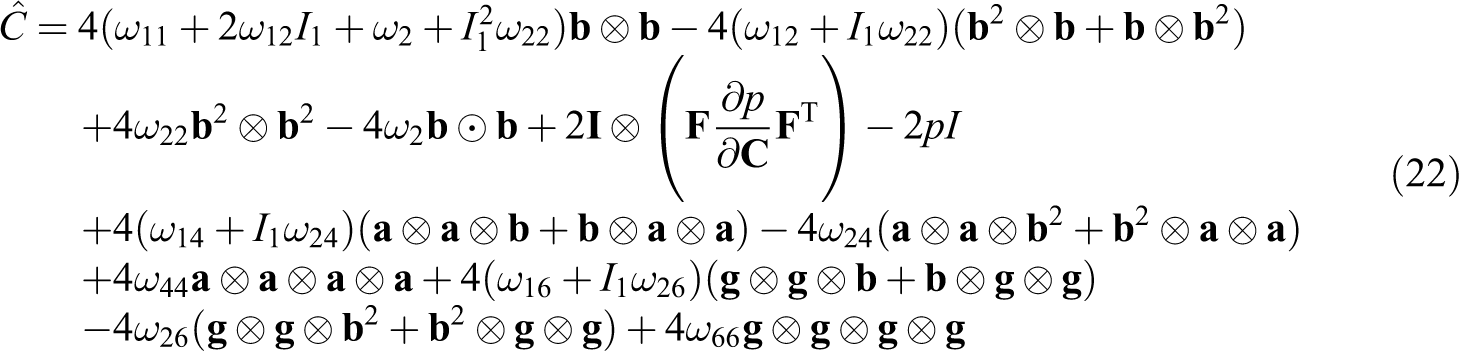
The spatial elasticity matrix

By replacing the formulation of C in equation (13) into equation (21), the spatial elasticity matrix
where the components of the fourth-order tensor

Material parameters identification
For materials whose stiffness is low and the large strain occurs during the deformation procedure, such as woven composites and biological tissues, the simple tensile test and/or biaxial test were usually used to characterize the material properties. 16,17 For assembly process, nonrigid composite parts undergo essentially the large bending deformation. Therefore, the three-point bending test that is considered more appropriate to characterize the bending properties of composite sheets was used in this study. The material parameters M1, k1, k2, k3, and k4 of the strain–energy function in equation (16) and M1, M2, M3, k1, k2, k3, and k4 of the strain–energy function in equation (17) for multilayered carbon-fiber–reinforced material were, respectively, determined by curve fitting by minimizing the discrepancy of loads between the experimental bending test data and numerical simulation using Abaqus.
Three-point bending test
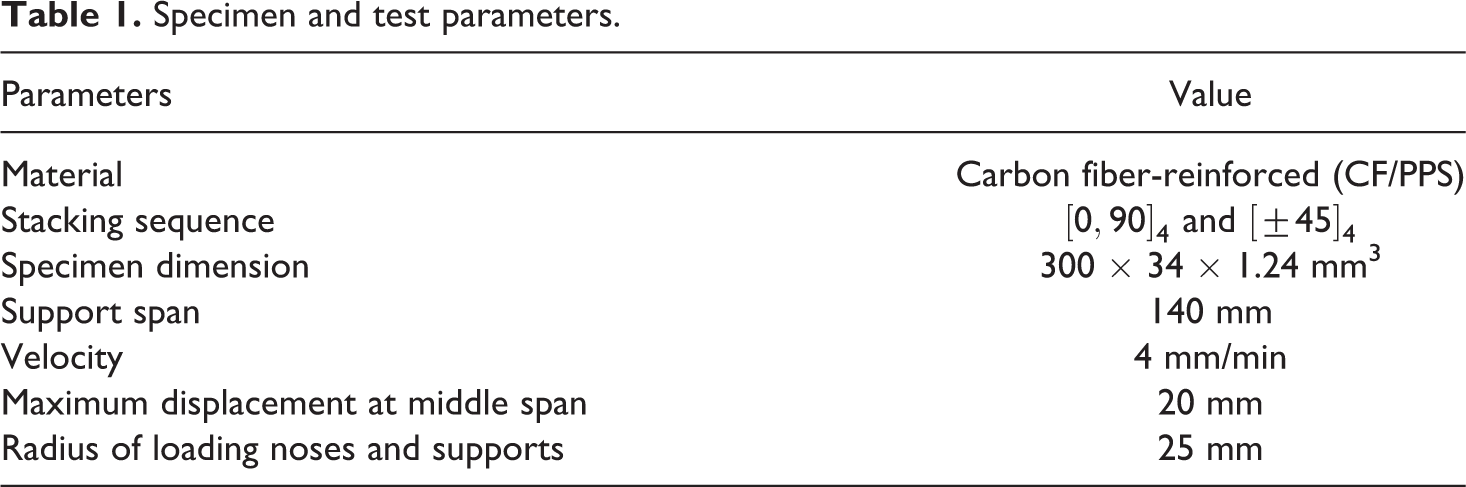
The composite material used in this study is a consolidated plate of four layers of CF/PPS. Each layer is composed of a PPS matrix and carbon fiber fabrics. The fiber volume fraction (Vf) is of 50%. The total thickness of the four-layer laminate is about 1.24 mm (0.31 mm per layer). Specimens with dimensions 300 × 34 × 1.24 mm3 were fabricated with two different stacking sequences
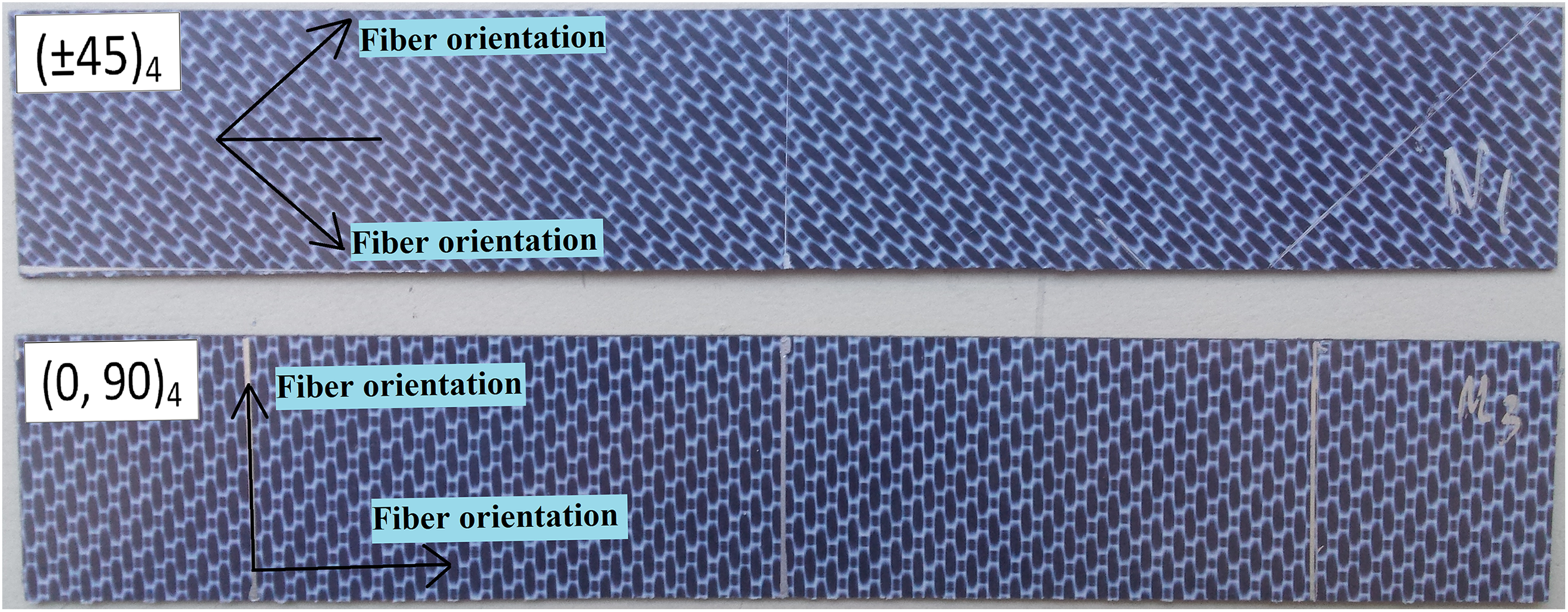
Test specimens.
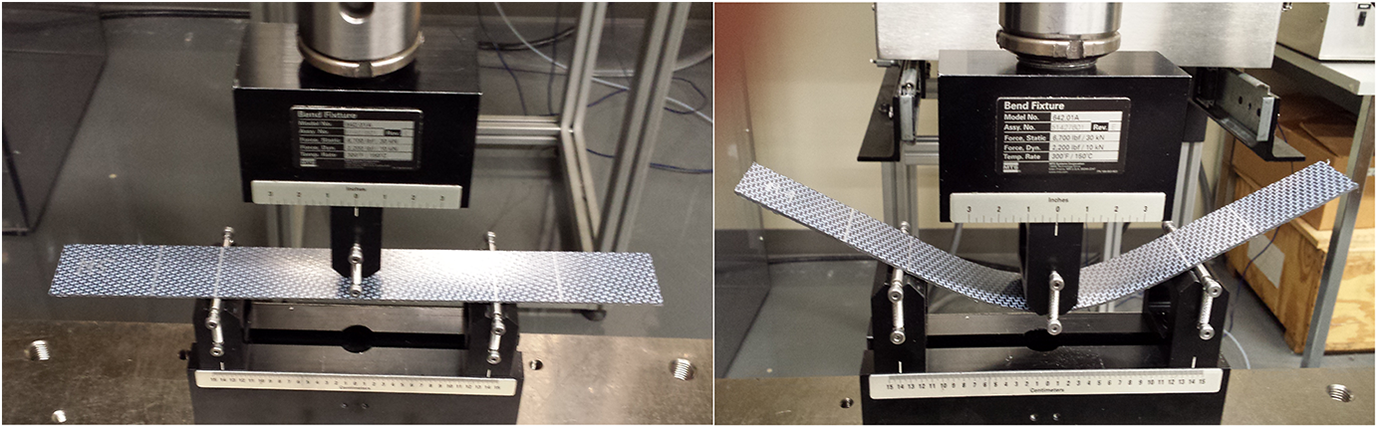
Three-point bending test using the MTS machine.
Specimen and test parameters.
Computational experiment
Numerical simulation of the three-point bending test is created in Abaqus using UMAT subroutines developed for two strain–energy functions, that is, equations (16) and (17). Specimen is meshed with four-node shell elements (S4R in Abaqus/Standard) with a four-layer composite section. Each layer behaves like an orthotropic material. The computational model for the simulation of the three-point bending test with displacement control is depicted in Figure 5, where frictionless contact between supports and specimen was defined.
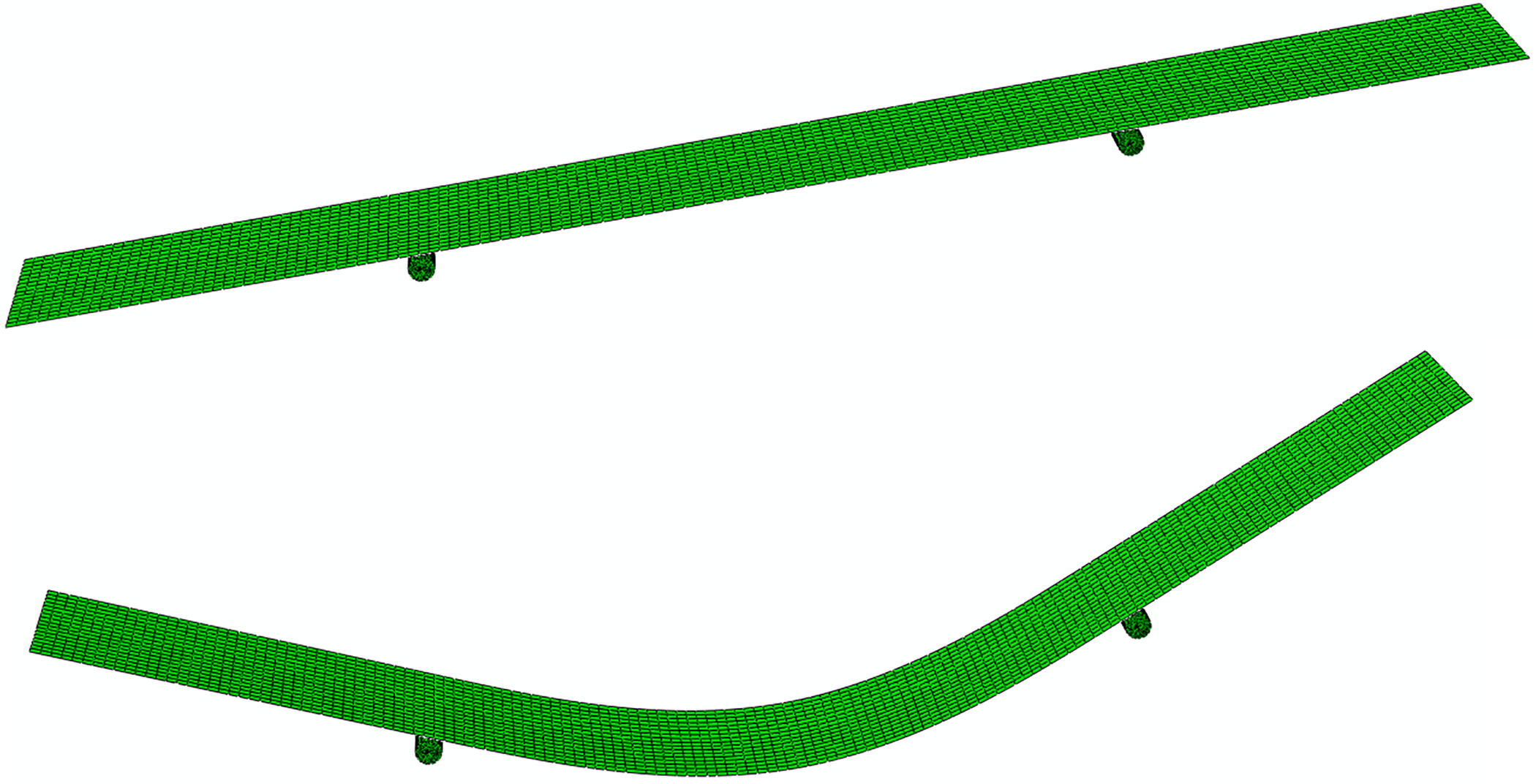
Finite element modeling for three-point bending test.
Inverse characterization method
The inverse characterization method allows identifying the material parameters of the strain–energy functions by minimizing the difference of loads between the experimental test data and numerical simulation. For this fitting process, the following objective function was used together with the adaptive response surface optimization method:

Herein, N denotes the number of steps at which loads were measured, and

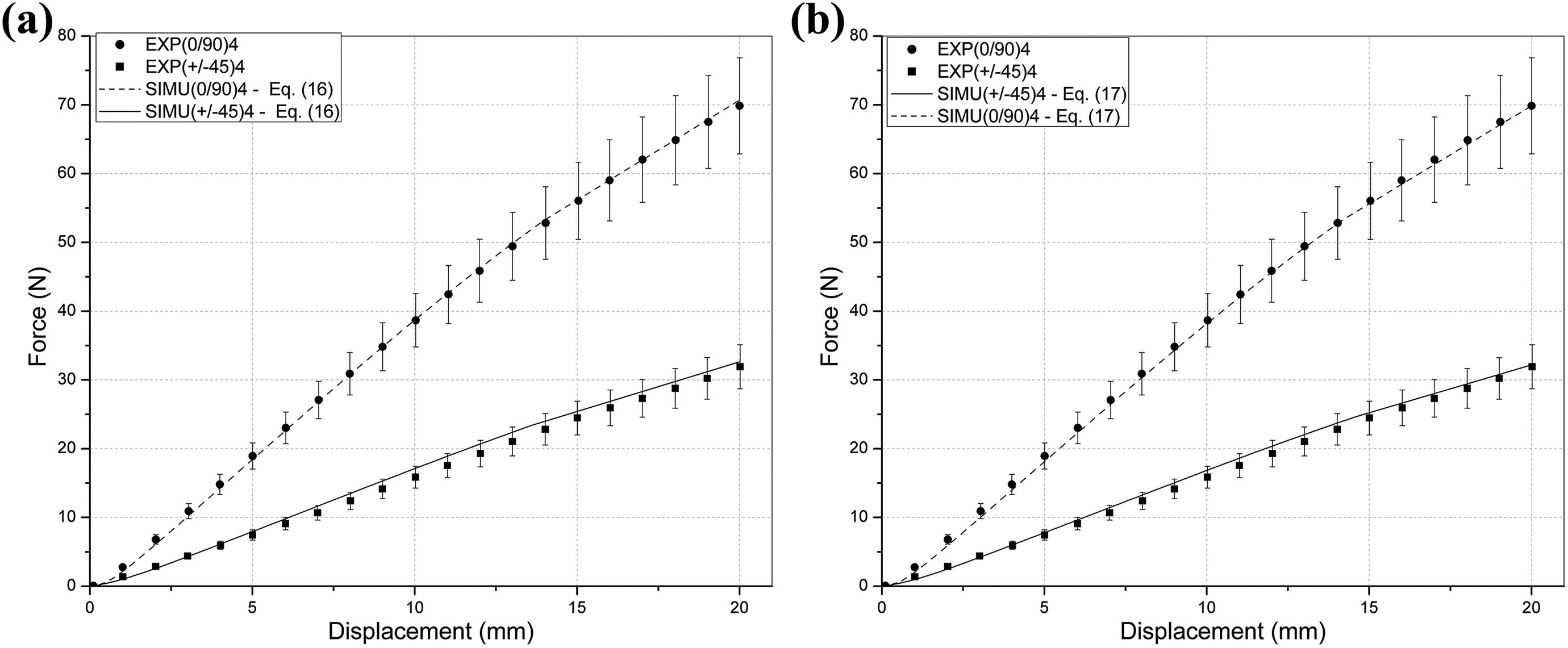
Comparison between numerical results and experimental data: (a) strain–energy function in equation (16); (b) strain–energy function in equation (17).
Optimized parameters values for strain–energy function in equation (16).

Optimized parameters values for strain–energy function in equation (17).

where
Results showed that the relative errors of the curve fitting are small, with
Model validation and discussion
To validate the material models used in this study, a load test with a large sheet of multilayered FRTPC was performed. This test is chosen because the deformation in this load test is quite similar to that in assembly process. The bending displacement of the composite sheet predicted by numerical simulations using Abaqus was compared with the experimental results from the load test.
Experimental test
Table 4 summarizes experimental parameters used in this work. The material used here is the same as the material used in the three-point bending test presented above. The thickness of the four-layer laminate is 1.24 mm (0.31 mm per layer) with the stacking sequence
Experimental parameters.
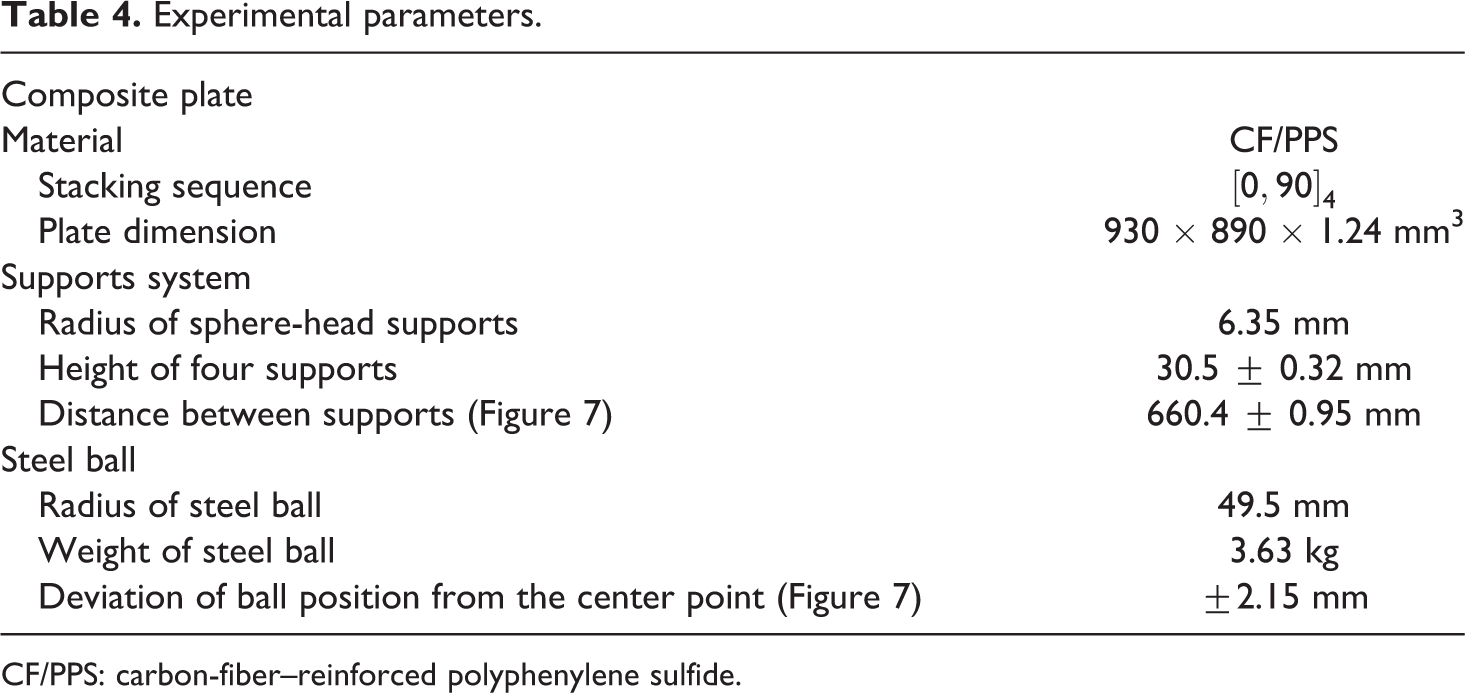
CF/PPS: carbon-fiber–reinforced polyphenylene sulfide.
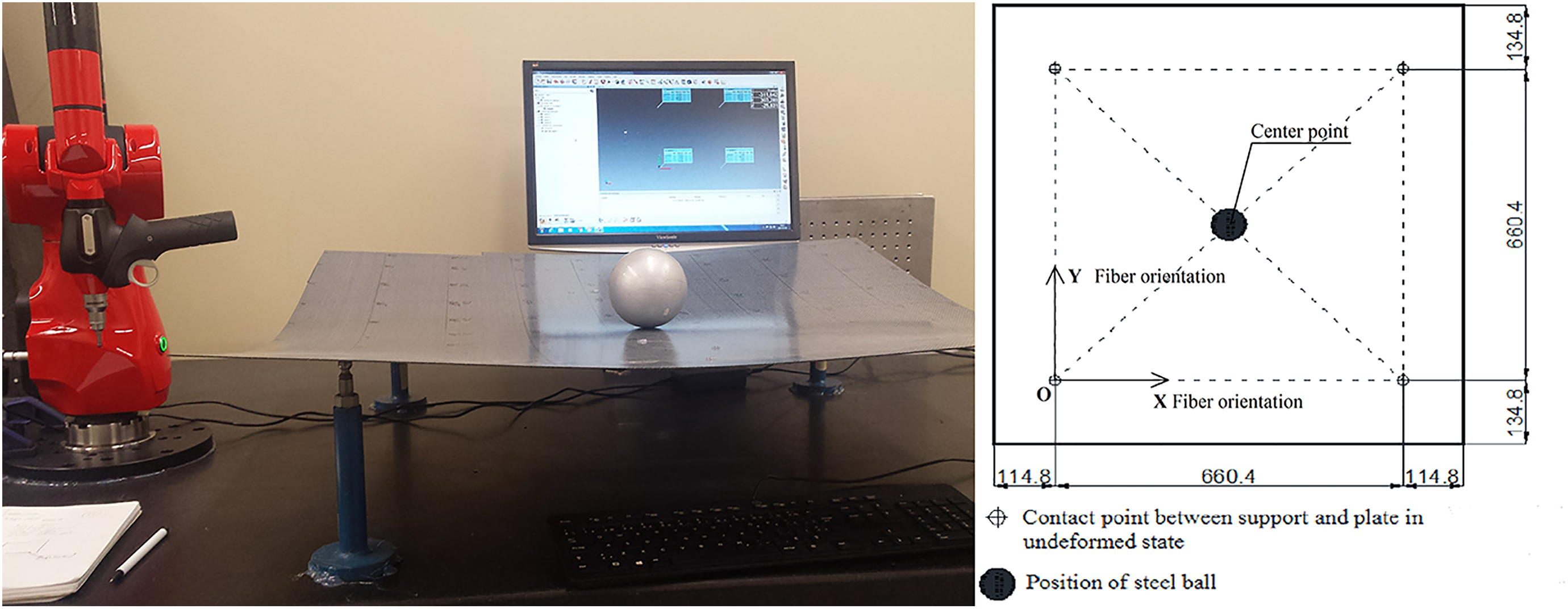
Bending load test set-up.
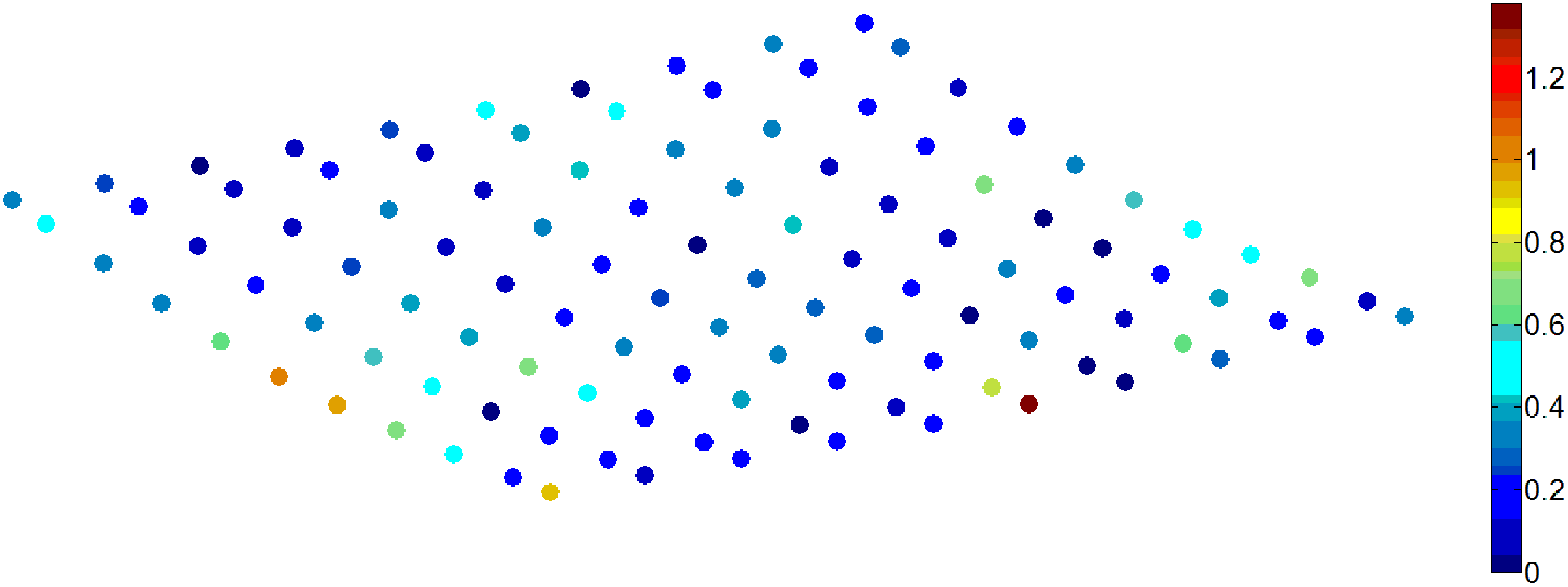
Measurement deviation of vertical displacement (mm).
Test simulation and result discussion
A finite element computational procedure that corresponds to the plate bending test introduced in the previous section is developed with Abaqus using a UMAT with parameters presented in Tables 2 and 3. The element type used in Abaqus is shell element (S4R) with a four-layer composite section. The specimen lies on four rigid spheres which represent supports used in the experiment. Frictionless contact between the specimen and supports is defined. A 35.59-N load, which is equivalent to the weight of the steel ball, is applied on the plate at the same location as in the experimental test (at the center point). The experimental data and simulated results were compared in terms of bending displacement along the 10 paths, as shown in Figure 9. The comparison of experimental and simulated vertical displacement along these paths is presented in Figure 10. The maximum and minimum differences between experimental and numerical results are summarized in Table 5.
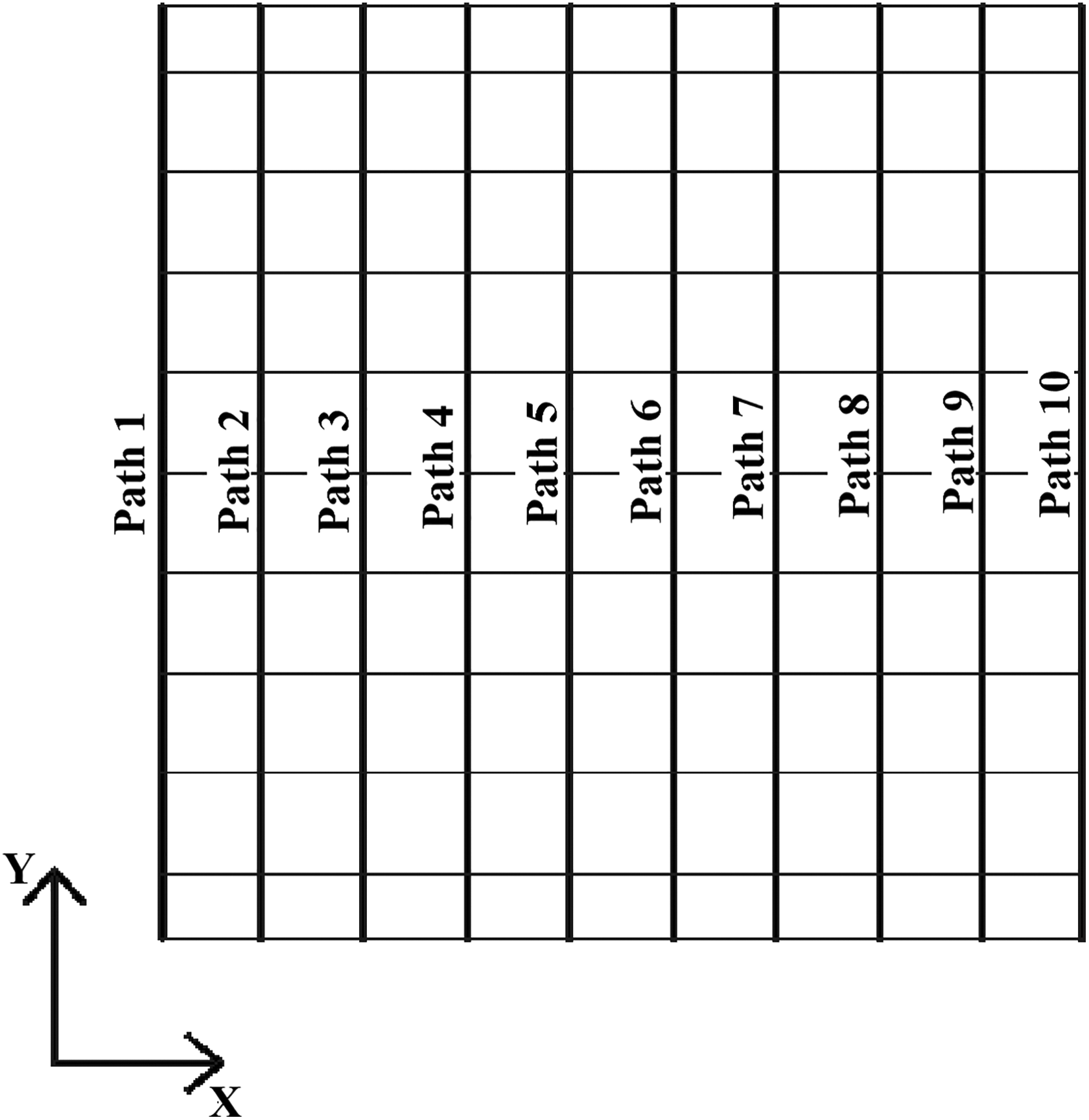
Path positions along Y-axis.
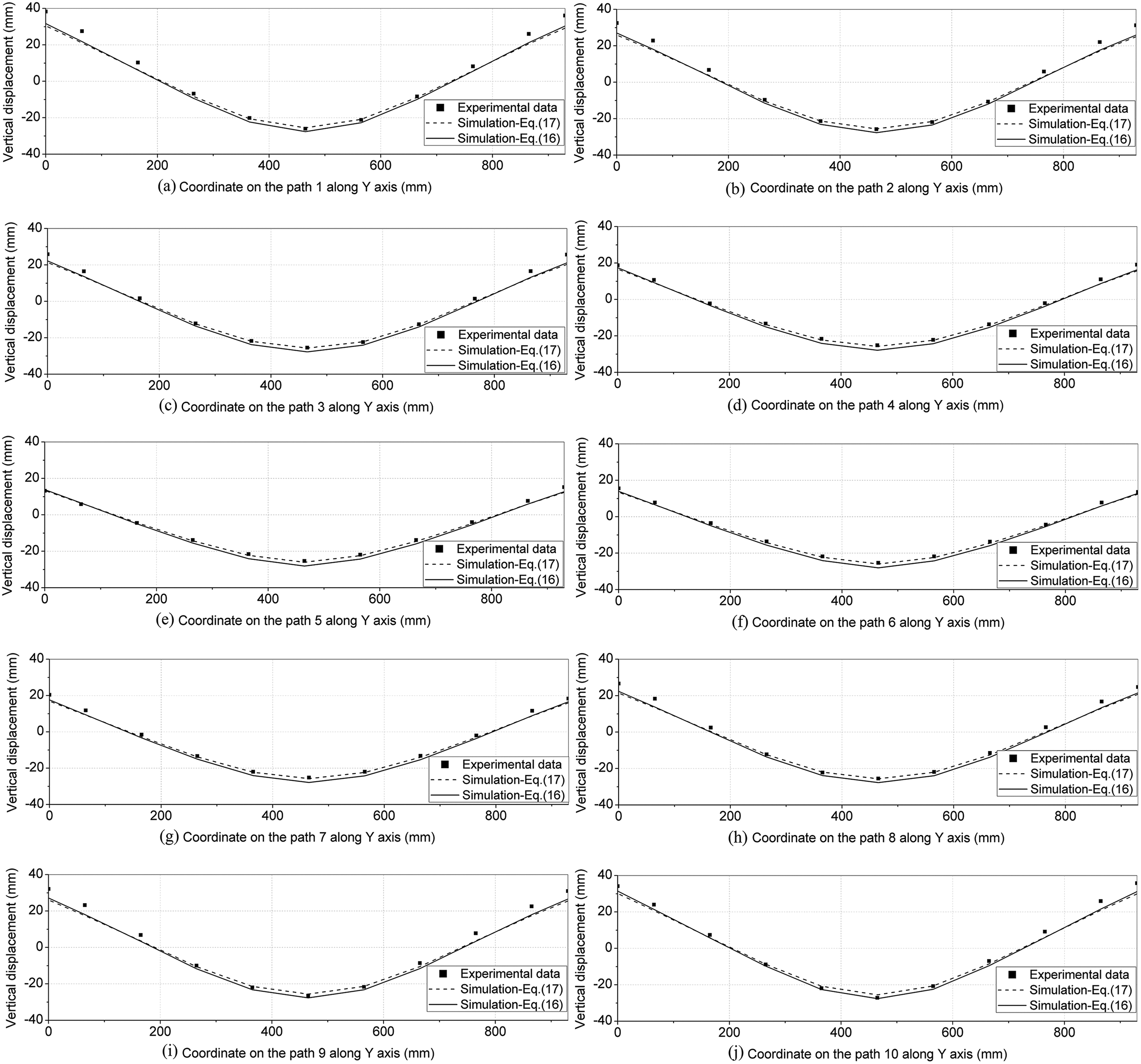
Result comparison ((a) path 1, (b) path 2, (c) path 3, (d) path 4, (e) path 5, (f) path 6, (g) path 7, (h) path 8, (i) path 9, and (j) path 10).
Maximum and minimum difference in vertical displacement between experimental and simulation data on each path.
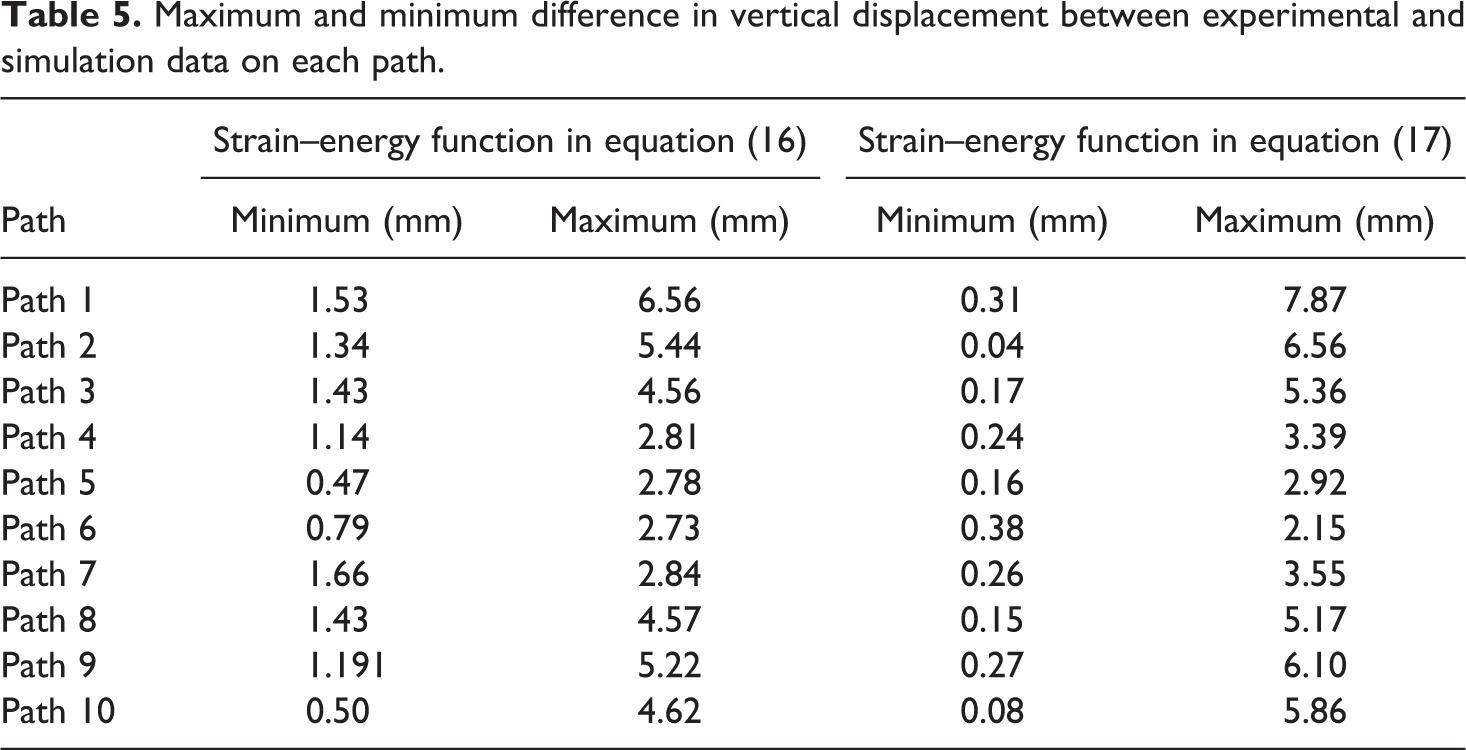
Figure 10 shows that at the middle of the plate (paths 4–8), the simulation gives better agreement with the experimental data than on the contour of the plate (paths 1–3 and paths 8–10). The maximum difference between simulation and experiment, 6.56 mm for strain–energy functions in equation (16) and 7.87 mm for strain–energy function in equation (17), appears at the boundary of the plate (path 1; see Table 5).
The average discrepancies between the experimental and the numerical results are 3.64 and 3.39 mm, respectively, for the strain–energy functions in equations (16) and (17), which are quite small in comparison with the dimensions of the composite sheet. It demonstrates that the simulations with two orthotropic hyperelastic models used in this study gave good agreements with the experimental results. It is remarked that the strain–energy function of equation (17) provided better response than that of equation (16).
Conclusion
This article presents the implementation of two orthotropic hyperelastic models used for assessing the mechanical behavior of multilayer FRTPC sheets. These models were developed based on the polyconvexity condition of strain–energy function and implemented in the UMAT subroutine of Abaqus for finite strain shell elements. The material parameters were numerically identified by fitting numerical simulation results to experimental results obtained from three bending tests for both stacking sequences Both proposed orthotropic hyperelastic models are appropriate for the CF/PPS multilayer composite material. The parameters of these models can be well identified in three-point bending tests with two different fiber orientation configurations. The numerical simulation using shell element (S4R) with the composite section of four layers in Abaqus is good enough for the multilayer FRTPC sheets. These material models responded well the validation case of the ball load test on a large CF/PPS multilayer composite sheet.
Footnotes
Acknowledgments
The authors would like to thank the National Sciences and Engineering Research Council and our industrial partners for their support and financial contribution.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.