
Abstract
In the present work, static deformation, dynamic characteristic, and time response of laminated composite plates with surface-bonded shape-memory alloy (SMA) sheets are modeled. A modified higher order shear deformation theory with Ritz method is utilized. The energy balance equations are used to formulate the nonlinear heat transfer governing equations. The time response of the SMA/elastomer plate and the deflection as well as dynamic characteristics before and after activation of the SMA is computed. A Mathematica code is developed to analyze different plate problems. Parametric studies are performed for proposed structure system to demonstrate the effect of thickness ratio, aspect ratio, material properties, thermal expansion coefficient, electric input power, and thickness of SMA sheet on the transverse deflections, natural frequencies, and response time of the SMA layer. The obtained results are compared to the available studies solved by different theories.
Keywords
Introduction
The shape-memory alloy (SMA) has been a subject of intensive research in the last decades due to its unique properties of one- and two-way shape-memory effect (SME), pseudoelasticity, and high damping capacity. Ghomshei et al.
1,2
proposed a nonlinear finite element model and experimental test for the time response of a SMA actuator composed of matrix material with SMA sheets or wires embedded in or bonded to the matrix part. The model is developed based on a higher order shear deformation beam theory together with the von-Karman strain field. A one-dimensional constitutive equation with nonconstant material functions and sinusoidal phase transformation kinetics is used to model the thermomechanical behavior of the SMA actuator. The constitutive and phase transformation kinetic equations make distinction between the stress-induced martensite (SIM) and temperature-induced martensite (TIM) fraction. Balapgol et al.
3,4
studied the deflection, natural frequency, and time response of SMA-laminated composite plate using finite element model with first-order shear deformation theory. The composite plate consists of a thin layer of SMA bonded to elastomer core. They concluded that the input power, heat sink strength, thermal conductivity, and thickness of the elastomer layer play important roles for controlling the time response of the SMA-laminated actuator. Gordaninejad et al.
5
presented a two-dimensional finite element model based on classical lamination theory, energy balance equations, and two-dimensional transition model of SMA layer for the response of thermally driven SMA/elastomer actuator. Wu et al.
6
derived a closed form solutions for the stress–strain–temperature response of a thermally driven SMA composite actuator neglecting the heat conduction in axial direction. Rogers et al.
7
used the Rayleigh–Ritz method to perform a linear analysis for simply supported plate embedded with SMA fibers. They studied the plate deflection, free vibration, buckling, and acoustic control. Lin et al.
8
proposed a closed form solution for symmetric composite beams embedded with SMA fibers with various boundary conditions. The resultant actuation forces and normal stress distribution were calculated for the proposed beams. One of the earliest models is the one-dimensional Tanaka’s model,
9
a macroscopic model that is derived from thermodynamic concepts and through experimental observations. Martensitic transformation was considered progressive through an internal variable, the volume fraction of martensite (ξ). The evolutionary equation was determined by considering the transformation micro-mechanism and it is expressed using an exponential function in the form of
Paine and Rogers 13 developed a model for SMA wire actuator for use in intelligent material systems. They determined the effect of the composite manufacturing on the nitinol performance. The results of their study investigating the effects of a “high temperature” thermoplastic composite processing cycle on the nitinol actuator. Their proposed actuators were exposed to a number of thermoplastic processing cycle simulations at 400°C. The critical parameters, such as processing time, training of the actuators, and the type of the actuators, were varied to determine their effect on the performance of the nitinol actuator. The obtained results agreed well with the data from the simulation tests.
Kalamkarov et al. 14 proposed asymptotic homogenization models for smart composite plates with periodically arranged embedded actuators and rapidly varying thickness.
Their models determine both local fields and effective elastic, actuation, thermal expansion, and hygroscopic expansion coefficients from three-dimensional local unit cell problems. They applied their models to rib-reinforced smart composite plates, smart sandwich plates with rib-like filler, wafer-reinforced smart composite plates, and sandwich smart composite plates with honeycomb filler. Their results conform with the classical laminate theory. They found that the differences in the values of the effective coefficients like piezoelectric actuators were attributed to the geometries of the respective unit cells. They conclude that the importance of the effective coefficients lies in the fact that they are universal in nature, and once determined they can be used to study a wide variety of boundary value problems.
In the present study, a two-dimensional nonlinear transient analysis of thermally driven composite elastomer plate with SMA sheet bonded on its surface is presented. A modified higher order shear deformation theory (MFSDT) with Ritz method is utilized. The two SMA constitutive models are used: a linear model that provides a one-dimensional relation between the martensite fraction with temperature and stress during the phase transformation, and Brinson’s model that divides the martensitic volume fraction into two parts, one corresponds to the fraction of the SIM, and the second represent the fraction of the TIM. The energy balance equation is used to solve a two-dimensional temperature distributions of the SMA layer. An α-family method is used to transfer the heat equation from ordinary differential equation to a set of algebraic equations. The time response and the deflection of the SMA/elastomer plate are computed. The natural frequencies are expressed at certain time (t) of the phase transformation and before and after activation of the SMA plate. The obtained results are compared to the available literatures.
Displacement field equations
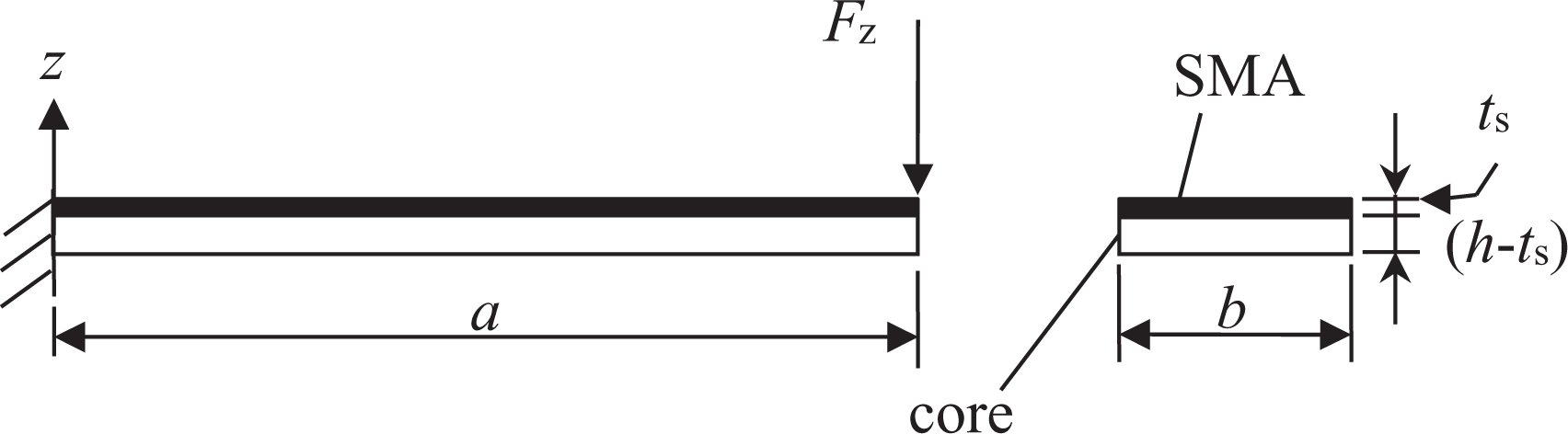
The layout of a SMA composite plate actuator is shown in Figure 1. The plate consists of a layer of SMA of thickness (ts
), which is bonded to a composite plate of thickness
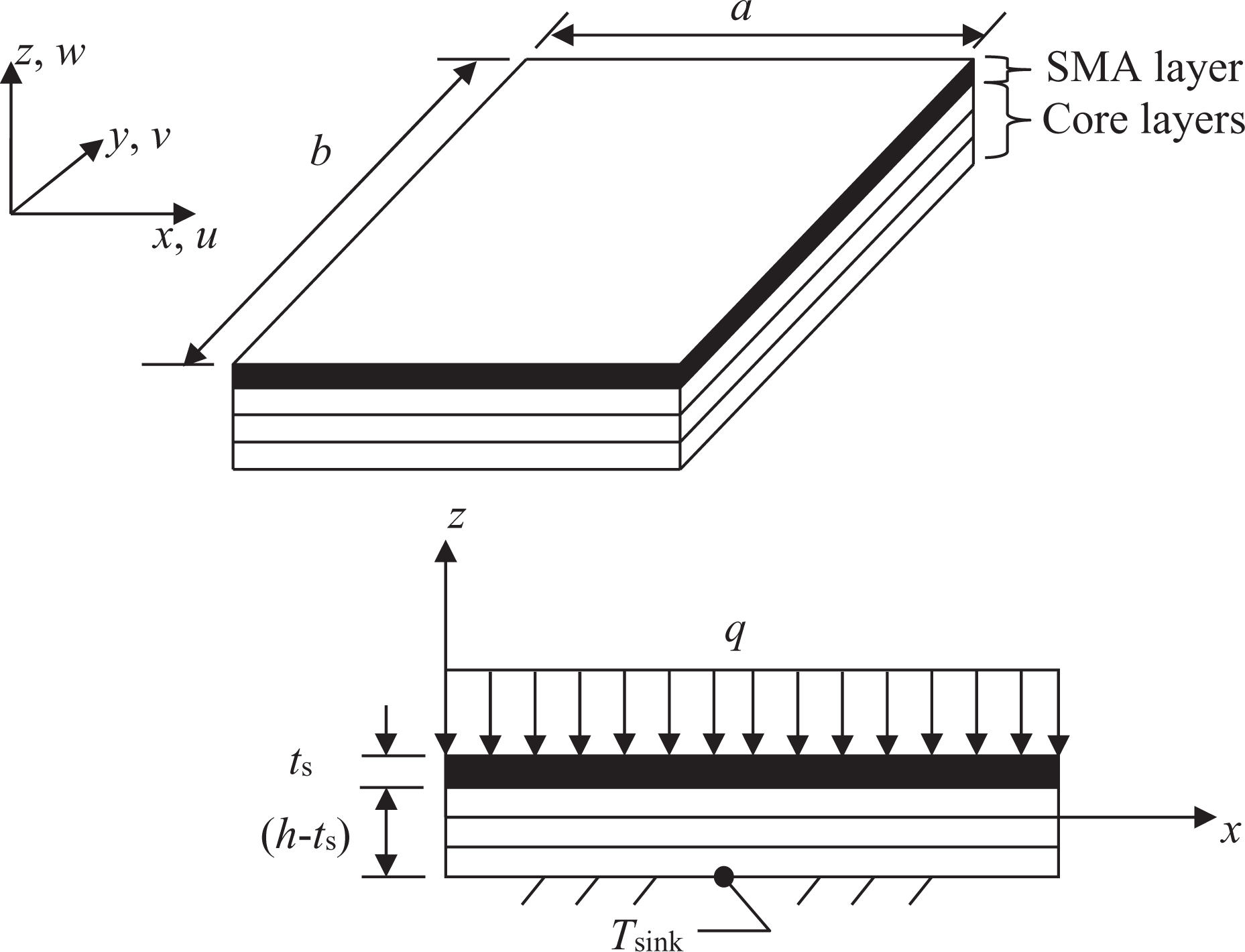
SMA-laminated plate with applied loading. SMA: shape-memory alloy.



where
The basic assumptions are that the SMA layers and the host layers are perfectly bonded, both thermal stresses and temperature in the phase transformation of SMA are considered, and the plate undergoes a small displacement.
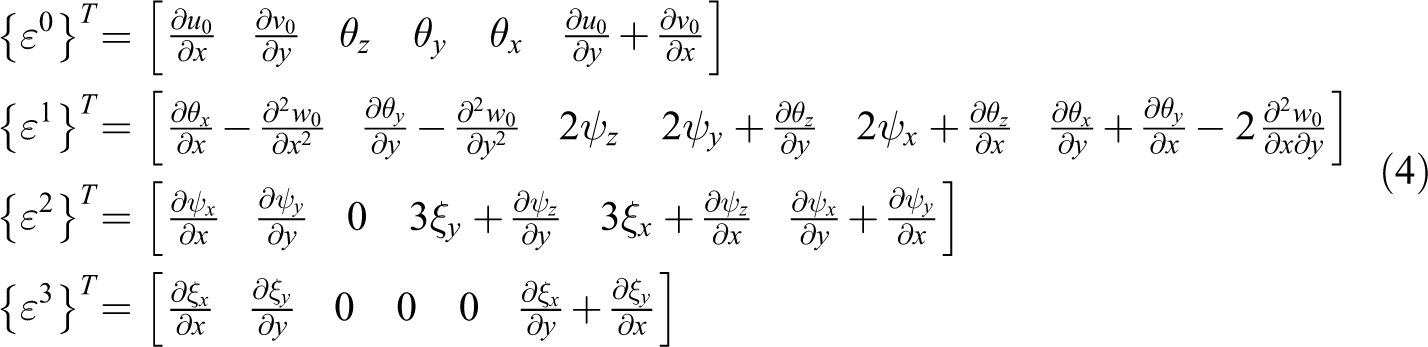
Strain–displacement relationships
The strain–displacement relationships can be expressed in a matrix form as follows:

where

Stress–strain relationships
The generalized stress–strain relationships can be written in contracted notation as follows:

The transformed stress–strain relationships for an orthotropic lamina oriented by an angle θ can be written as:
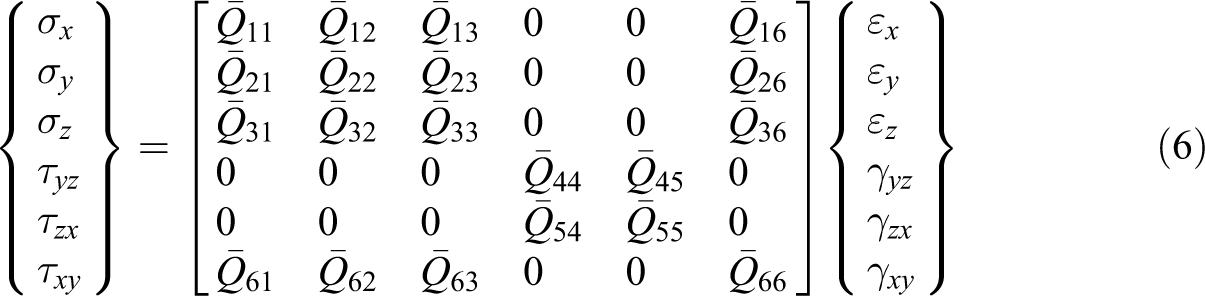
The elements of the transformed symmetric stiffness matrix
During martensitic transformation of SMA the modulus of elasticity of the metal is uniformly blended with the martensite and austenite phases. 3 The SMA layers and the host layers are perfectly bonded. The constitutive relationship of the SMA layer is:

where
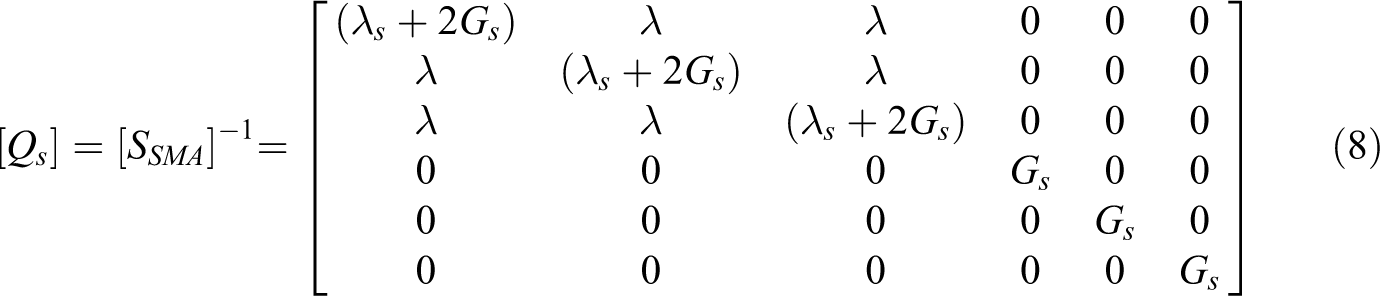
where λs and the shear modulus G s are given by:

And the Young’s modulus Es of the SMA layer is given by:

where EA and EM are the Young’s moduli in austenite and martensite phases, respectively.
The

and α is the thermal expansion coefficient of the SMA material.
It is clear that equation (7) is nonlinear equation in nature since
SMA constitutive models
SMA linear model
The linear model provides a one-dimensional relation between the martensite fraction with temperature and stress during the phase transformation. 8 In the present model, the heating and cooling transition process is given as:


where
SMA Brinson’s model
The Brinson’s model 12 made a significant improvement over Tanaka’s model 9 –11 and the Liang and Rogers’s model. 10 It recognizes the SIM as the only martensite that gives the functional property of SME and pseudoelasticity rather than the total martensite that contains both the TIM and the SIM. Brinson’s model assumes that the transformation depends only on the temperature and the stress, and the amount of transformation that occurs is described using the volume fraction of the SIM (ξ S). Brinson’s model is quite popular for engineering applications since it is simple, accurate, and easy to implement into numerical applications. Brinson made a modification so that this model can be used at low temperatures by dividing the martensitic volume fraction into two parts:

where ξ S corresponds to the fraction of the SIM, and ξ T refers to the fraction of the TIM given in Appendix 1.
Energy formulation
Hamilton’s principle
The governing differential equations of the whole structure are derived using Hamilton’s principle 19 :

where

By using the stress components, equations (6) and (7) yield:
where zi
are z-coordinates in z-direction from the midplane. Knowing that
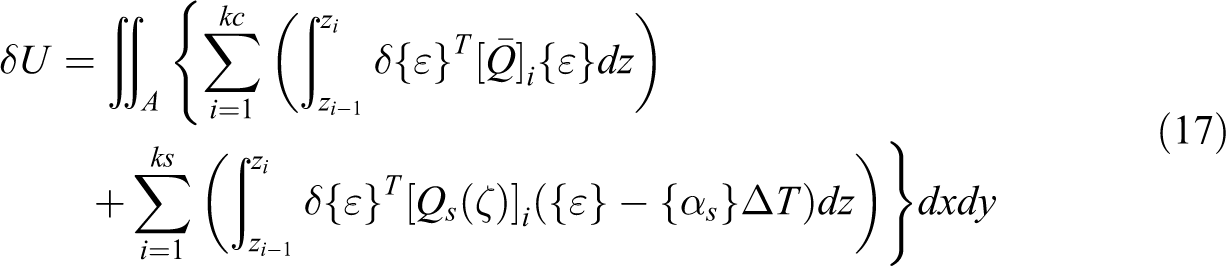
The strain energy can be divided into two parts as follows:

where
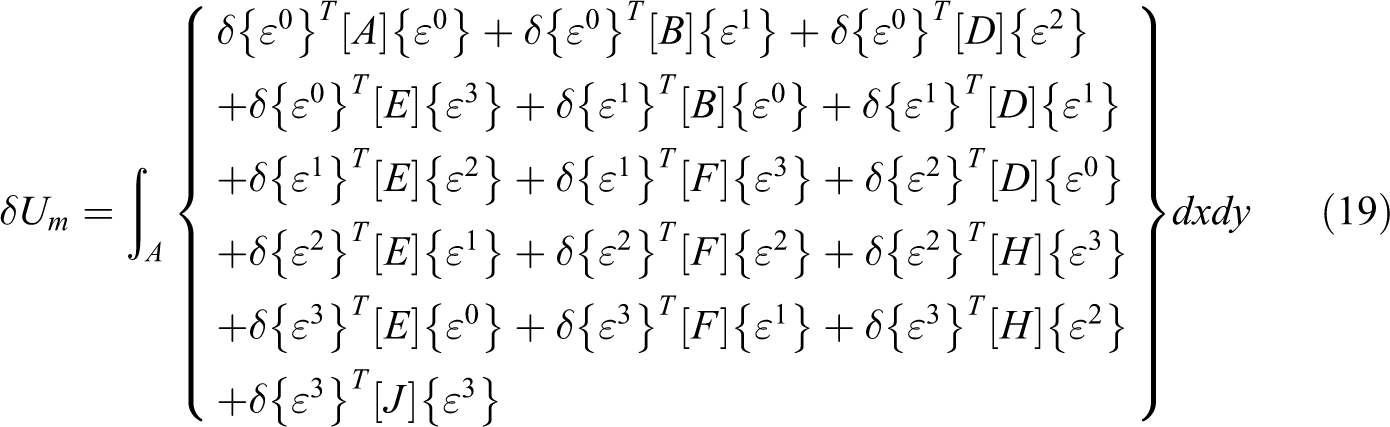
where the sub-matrices are given as:
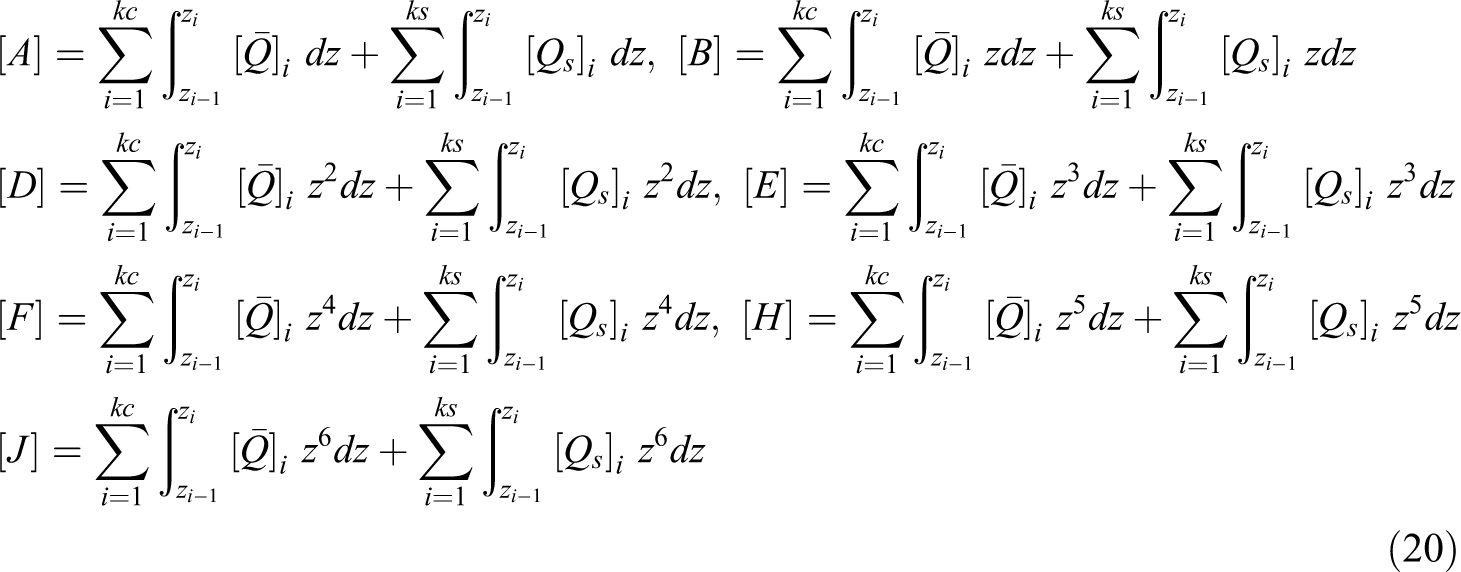

where A, B, and D are extensional, coupling, and bending stiffness matrices, respectively, and E, F, and H are higher order matrices.

The strain vectors
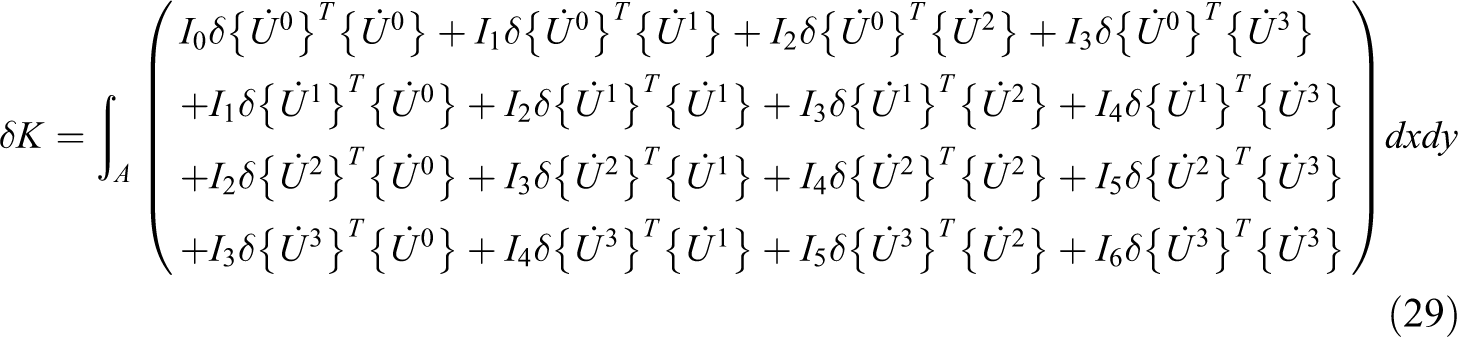
The virtual work

where

where

For kc is core layers and ks is SMA layers. Equation (24) is represented as

where

where

Substituting equation (27) into equation (26), we can write:
Ritz solution technique
The unknown displacements vector
Equations of motion
The equations of motion of the plate structure are derived using the Ritz approximation technique.
17,18
The strain vectors

where {q} is the generalized column vector of Ritz coefficients:

By substituting the assumed displacement functions into the total virtual strain energy (equation (18)), the virtual work (equation 23), and the virtual kinetic energy (equation (26)), one can obtain the equations of motion for the structure system:

where




The terms
In case of free vibration, the right-hand side of equation (33) is equal to zero

And the natural frequency is given by:

which is computed at certain time t during the phase transformation.
Heat transfer equation
Modeling of the heat equation of SMA layer
The SMA layer is activated when exposed to a source of heat. Heat power is considered as a homogeneous heat source in the SMA layer. The thermal energy of the activated SMA layer is assumed to be lost by conduction through the core structure. A two-dimensional temperature distribution is considered by taking element dx–dy of the SMA layer, the energy balance equation can be given as 5 :

where
P is the input heat power density in

where θ is the nondimensional temperature of the SMA, τ is the dimensionless time, RMA is the dimensionless heat of transition of the SMA, Rk is the dimensionless thermal conductivity of the core, S is the heat sink strength that characterizes the heat conduction loss from the SMA through the core to the heat sink, and RP is the dimensionless input power to the SMA layer. The dimensionless symbols are defined in Appendix 4.
Solution of the heat equation
The variational formulation of equation (41) over the plate area Ω is obtained by multiplying the equation by a weight function Ni :

Integrating by parts and rearranging the equation elements yields:

where nx
and ny
are the direction cosines of the boundary surface in the x- and y-directions. The variables θ and
where

where
The α-family method is used to transfer equation (45) from ordinary differential equations to a set of algebraic equations, in which a weighted average of the time derivative of a dependent variable is approximated at two consecutive time steps by linear interpolation of the values of the variable at the two steps.
For different values of α (0 < α < 1), the numerical integration schemes can be obtained. 20
Assume constant time step Δt gives:

By rearranging terms of equation (45) gives:
Knowing that

Thus, equation (47) can be written in a set of algebraic equations as follows:

where

Solution procedure
It is obvious that the equations of motion equation (33) and the heat equations equation (49) are coupled nonlinear equations. They can be decoupled if Select initial values for Calculate the new time Solve equation (33) for Solve equation (7) for Calculate Solve equation (49) for Check convergence by testing the value
Numerical results and discussion
1. The convergence and the validation of the present model is checked first for a laminated composite cantilever square plate (a = b = L) with side-to-thickness ratio
Material constants of the individual layers.

The convergence of the normalized maximum deflection
In order to find suitable shape functions for the cantilever plate, the unknown displacements
Using three-term polynomials gives acceptable accuracy, as seen in Figure 2. Moreover, after the three-term polynomials, the stiffness matrix becomes ill conditioned, and the numerical solution begins to have a significant error. Thus, three-term polynomials are used in x- and y-directions to represent the transverse deflection
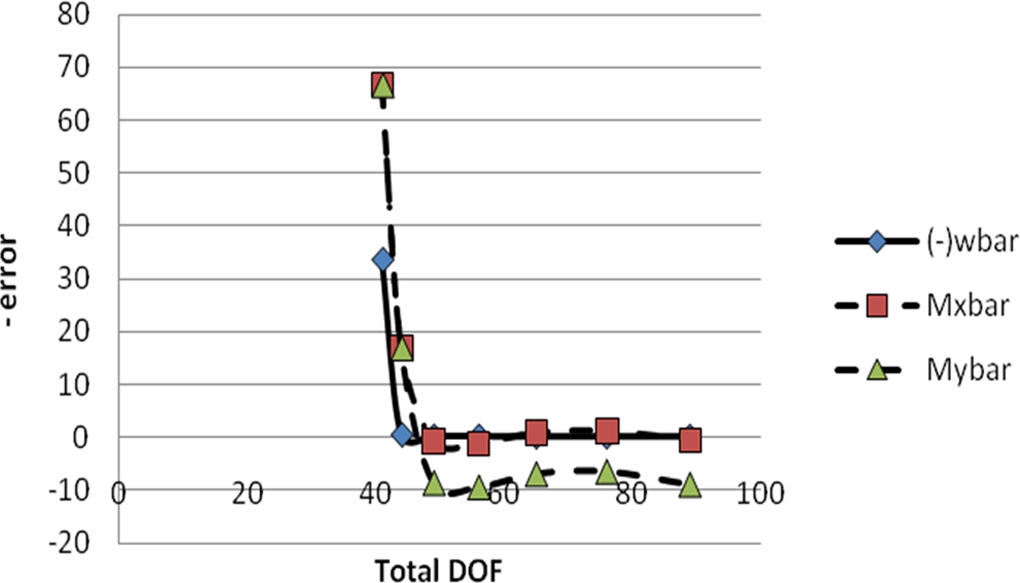
Convergence of the normalized maximum deflection
Normalized maximum deflection
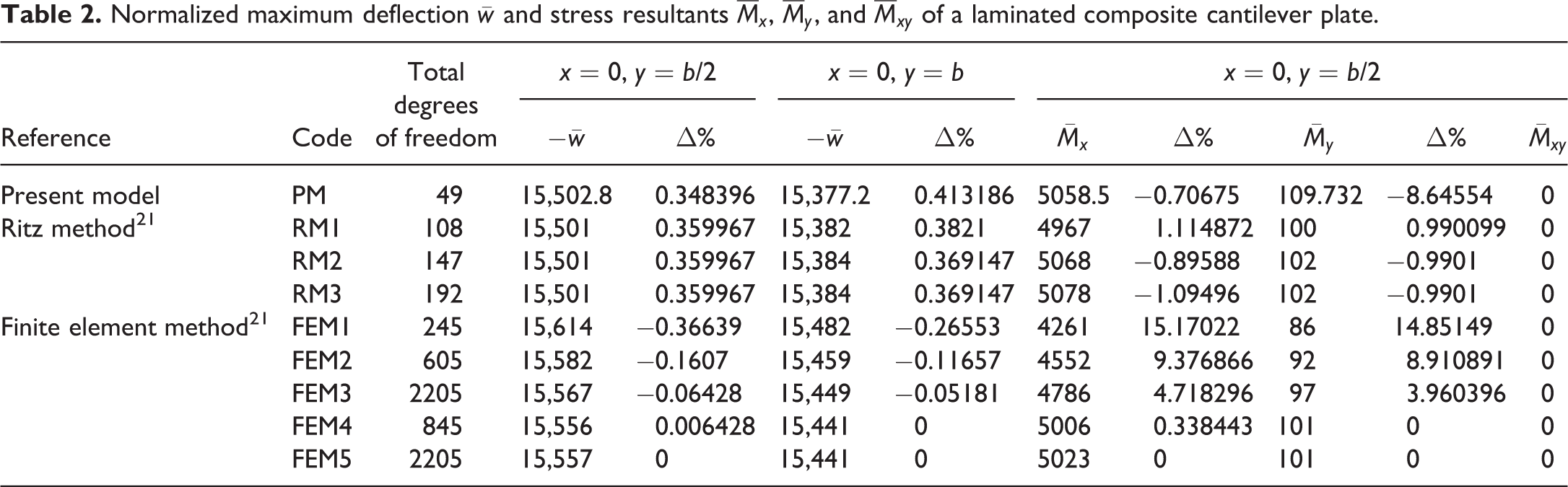
Table 2 shows good agreement between the results calculated from the present model and those calculated using Ritz method and finite element method published in the work by Qatu and Algothani. 21
2. To verify the present thermal model, two cases are presented. Case (I) studies the stress-free thermal response of SMA-laminated plate, while the phase transformation response of a cantilever plate subjected to mechanical and thermal loads is considered in case (II). Parametric studies are then presented in case (III) to investigate the effect of plate thickness, aspect ratio, material properties, thermal expansion coefficient, and SMA sheet thickness on the transverse deflections, natural frequencies, and SMA’s response time. A set of computer programs are developed for this investigation using Mathematica 7.
Case (I): Free thermal response of SMA-laminated plate
The plate consists of 55-Nitinol for the SMA layer glued on the top of Dow Corning SYLGARD core. The SMA layer thickness
SMA: shape-memory alloy.
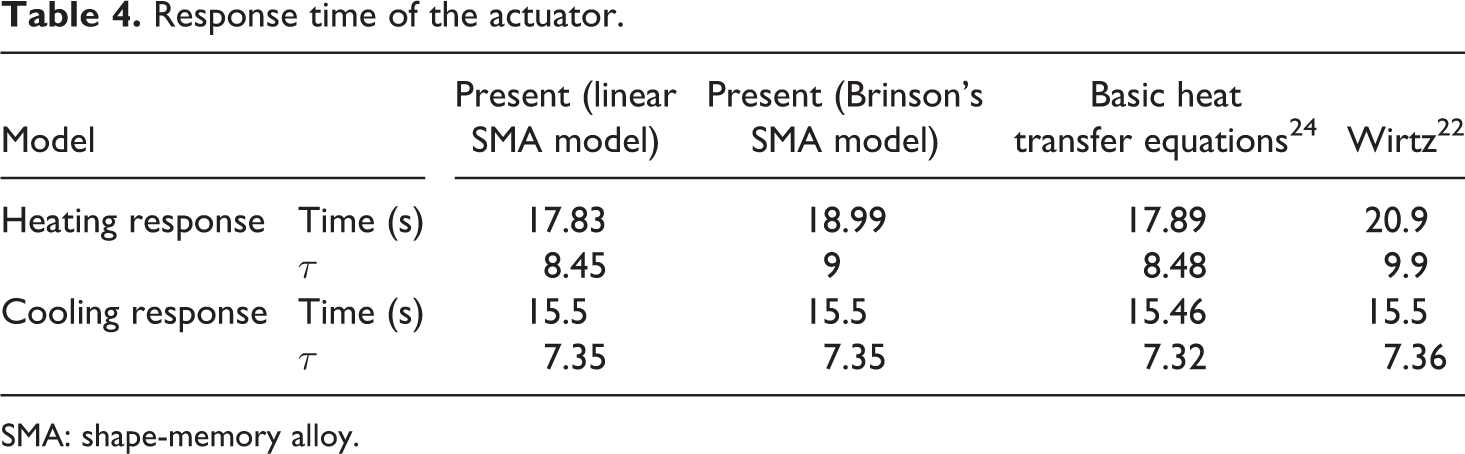
If we assume for validation purpose that 
Response time of the actuator.
SMA: shape-memory alloy.
Case (II): Phase transformation of SMA-laminated plate
The phase transformation response of SMA layer located at the top, subjected to a uniformly distributed load,
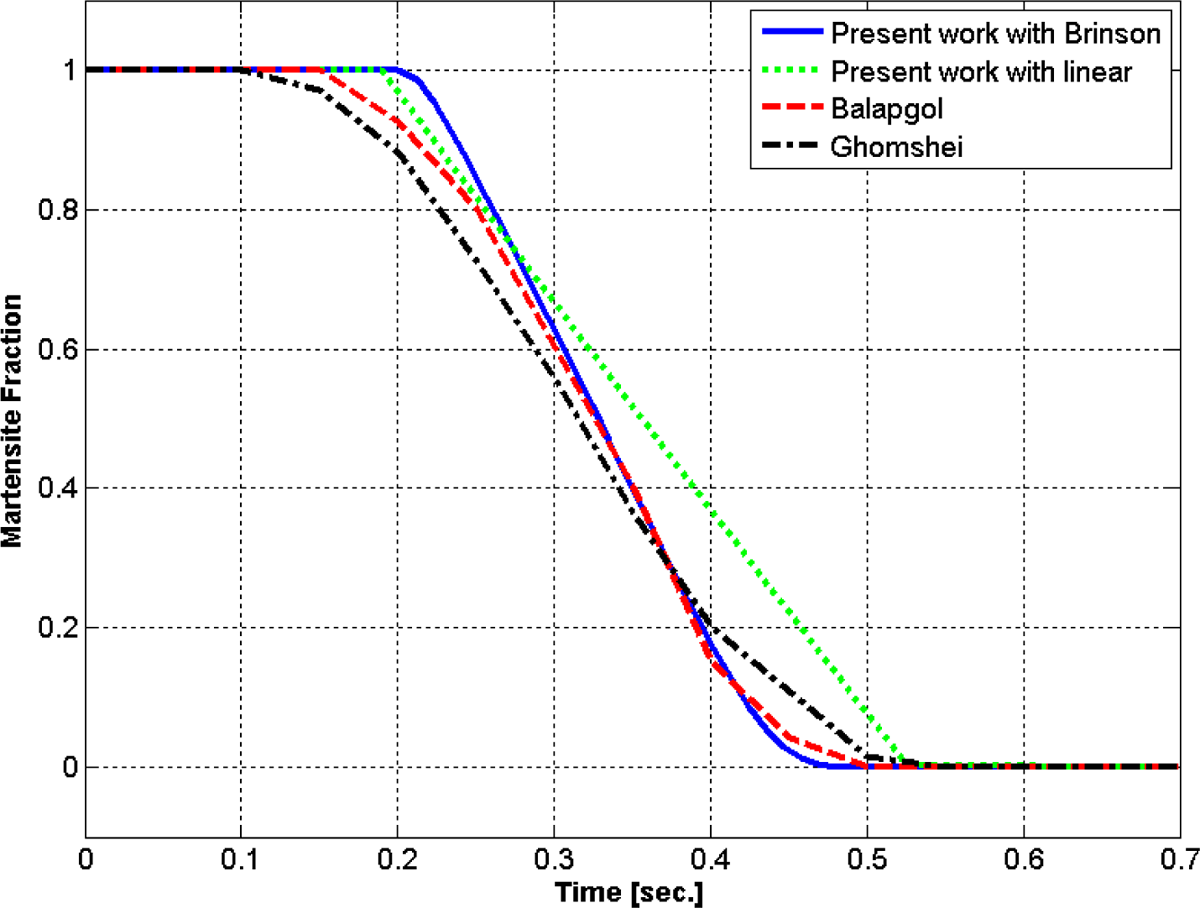
Variation of martensite fraction
Case (III): Parametric study of SMA composite plate
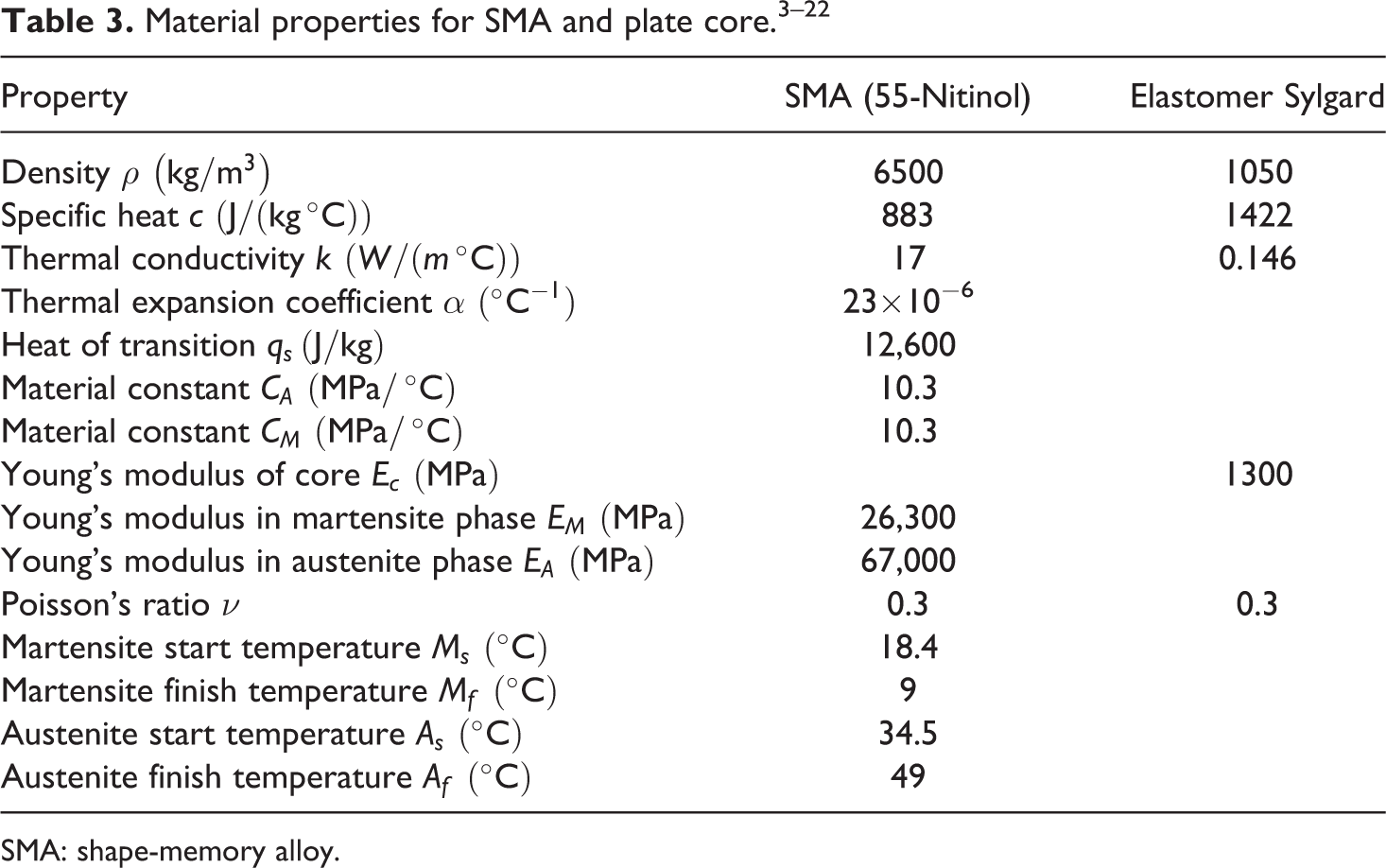
The plate used in case (I) is used for such parametric studies. The plate thickness is divided into 10 layers, the top layer is SMA, and the remaining 9 layers form the plate core. The material properties are given in Table 3 and the plate dimensions are shown in Figure 4. The plate span is
SMA-laminated cantilever plate. SMA: shape-memory alloy.
As the first step, the deflection response is calculated neglecting the effect of thermal expansion of the SMA layer. Then it is calculated considering the thermal expansion effect on the SMA layer only because the core layer is assumed at a constant temperature equal to the sink temperature, and the heating is only on the SMA layer.
Figure 5 shows the temperature response of the given plate in the heating–cooling cycle with input heat power
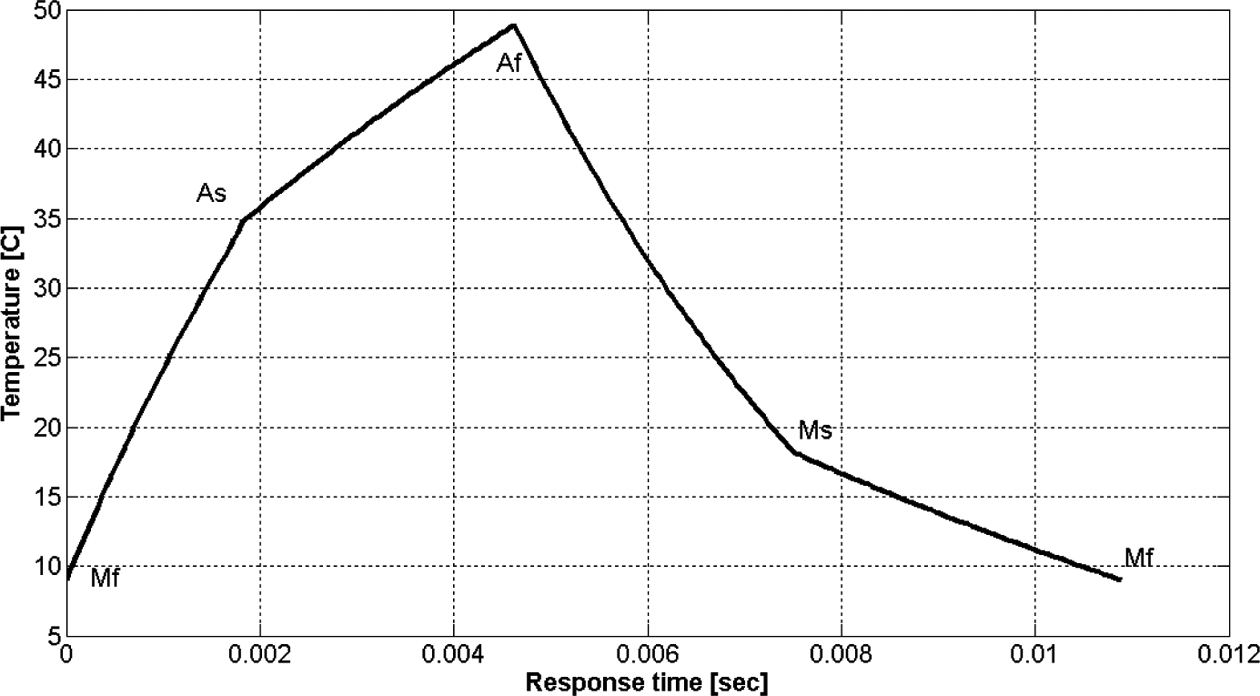
Temperature response of the SMA-laminated cantilever plate in the heating–cooling cycle with input power P = 2 × 107 W/m3. SMA: shape-memory alloy.
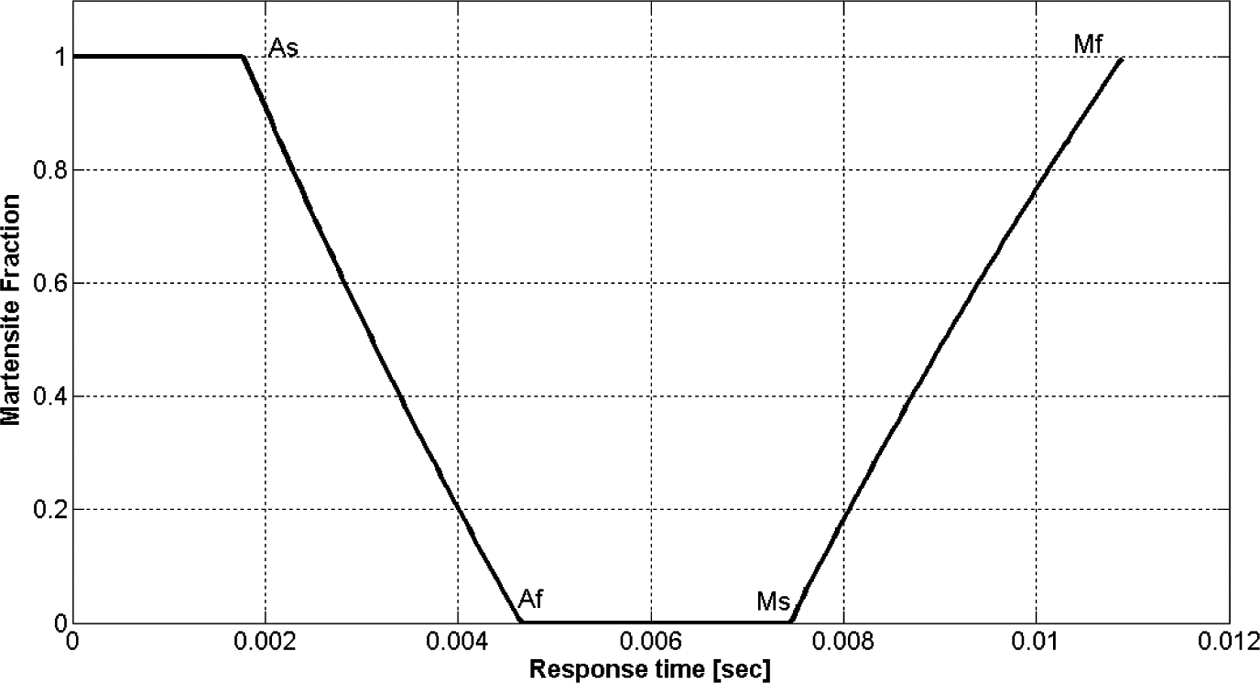
Variation of the martensite fraction with time response of the plate in the heating–cooling cycle with input power P = 2 × 107 W/m3.
Figure 7 shows the lateral deflection of the plate at y = b/2 before activation (T < Mf) and after activation (T > Af), the core Young’s modulus is 13 GPa. It is clear that the lateral deflection of the plate is decreased with the activation of the SMA layer due to the increase of its Young’s modulus from EM in the martensite phase to EA in the austenite phase as given in Table 3.
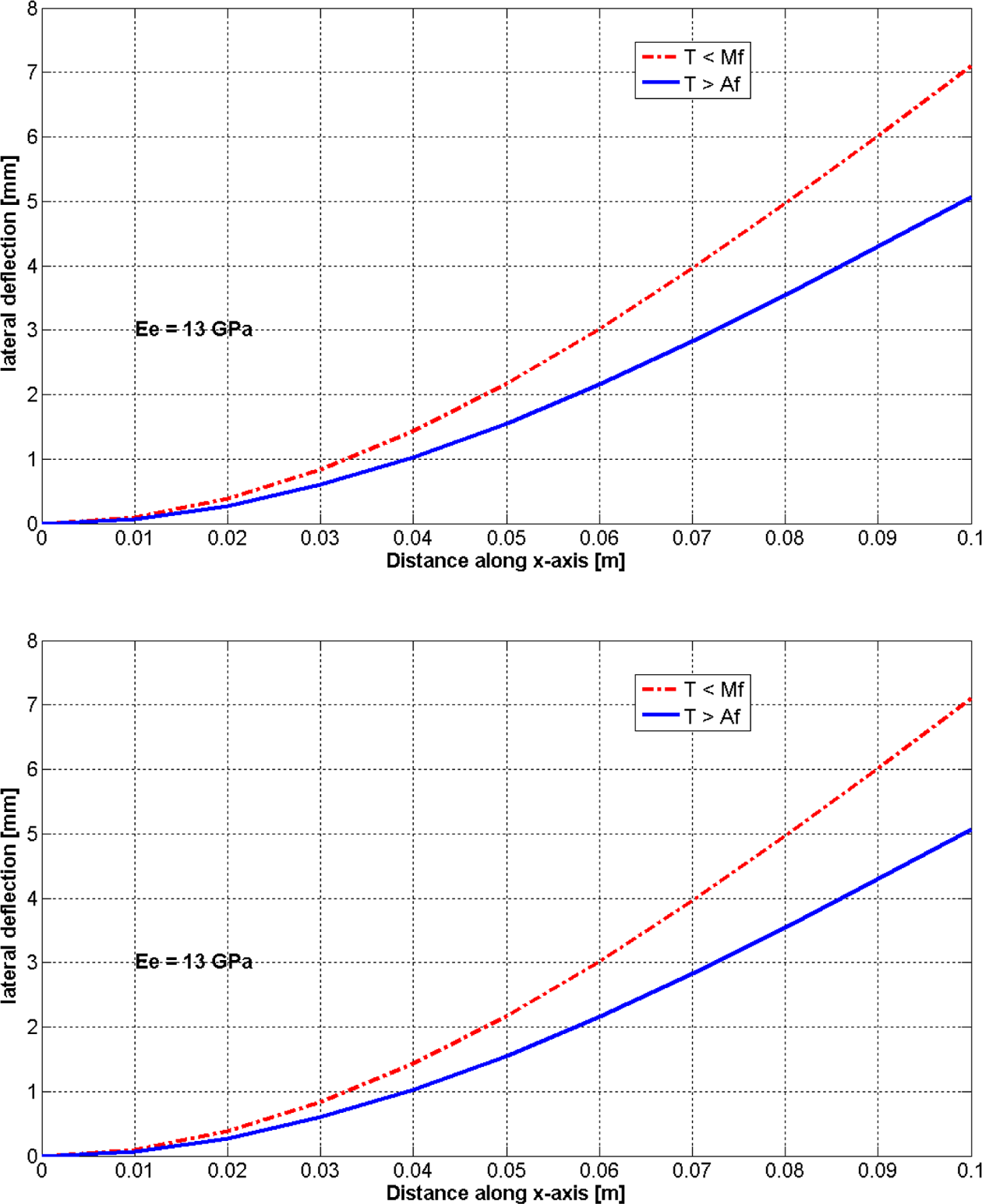
Lateral deflection of the plate before activation (T < Mf ) and after activation (T > Af ).
Effect of Young’s modulus of plate core
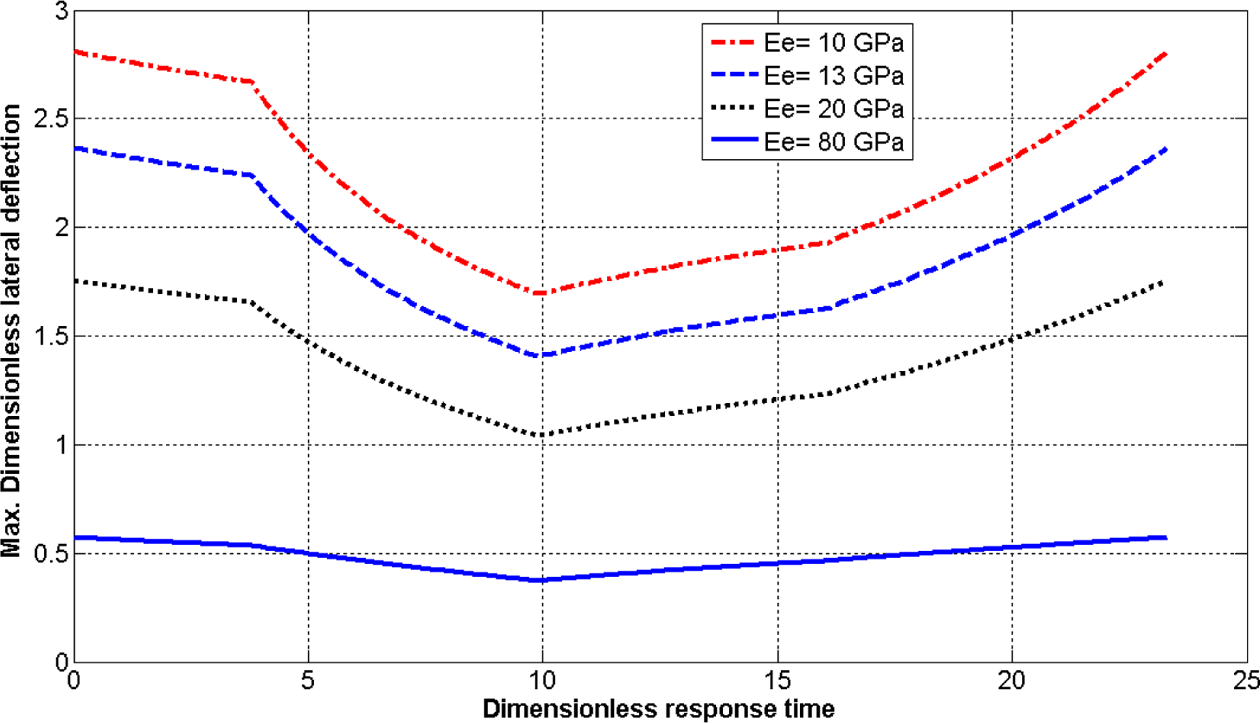
To study the effect of Young’s modulus of plate core (Ec ) on the lateral deflection of SMA-laminated cantilever plate, Ee is changed from 10 GPa to 80 GPa. Figures 8 and 9 show the lateral deflection of the plate before activation (T < Mf ) and after activation (T > Af ), respectively, at different values of Ec . Figure 10 shows the effect of Young’s modulus of core (Ec ) on the dimensionless response time and maximum deflection of SMA-laminated cantilever plate at the middle point of the free end. Figure 11 shows the effect of Young’s modulus of core (Ec ) on the response time and the natural frequency of the plate.
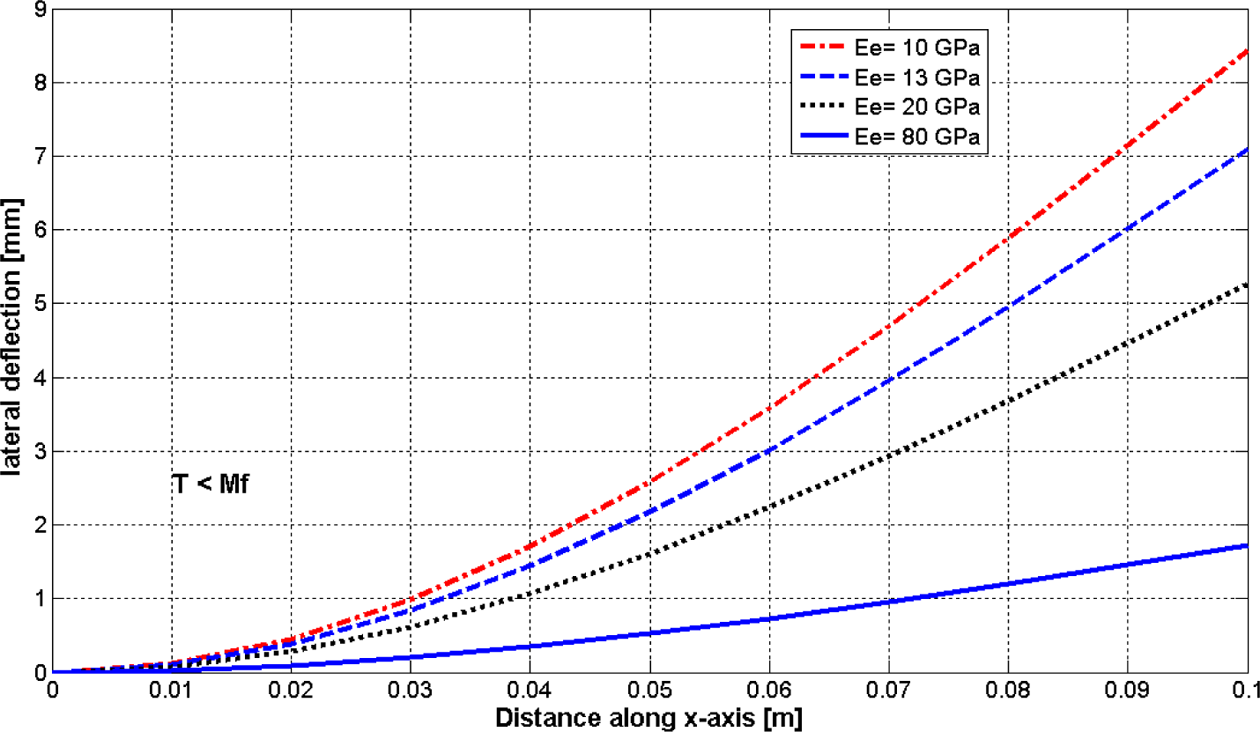
Effect of Young’s modulus of plate core (Ec ) on the lateral deflection of the plate before activation (T < Mf ).
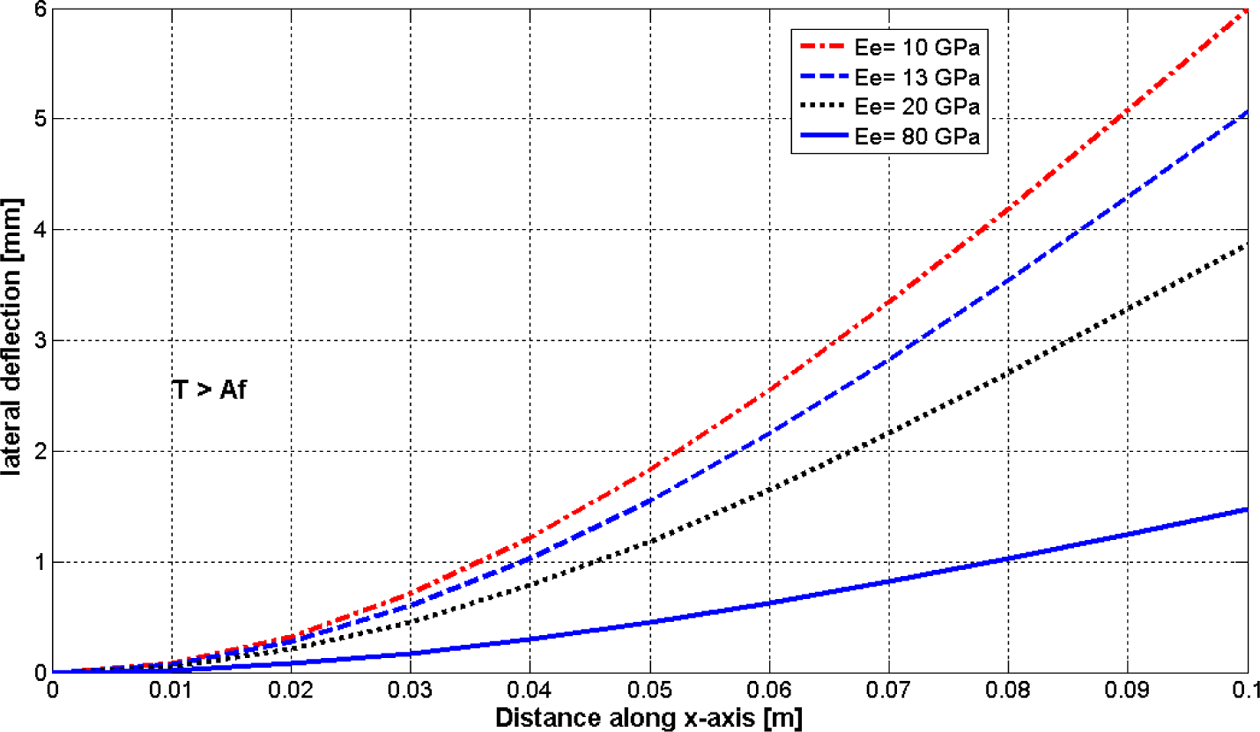
Effect of Young’s modulus of plate core (Ec ) on the lateral deflection after activation (T > Af ).
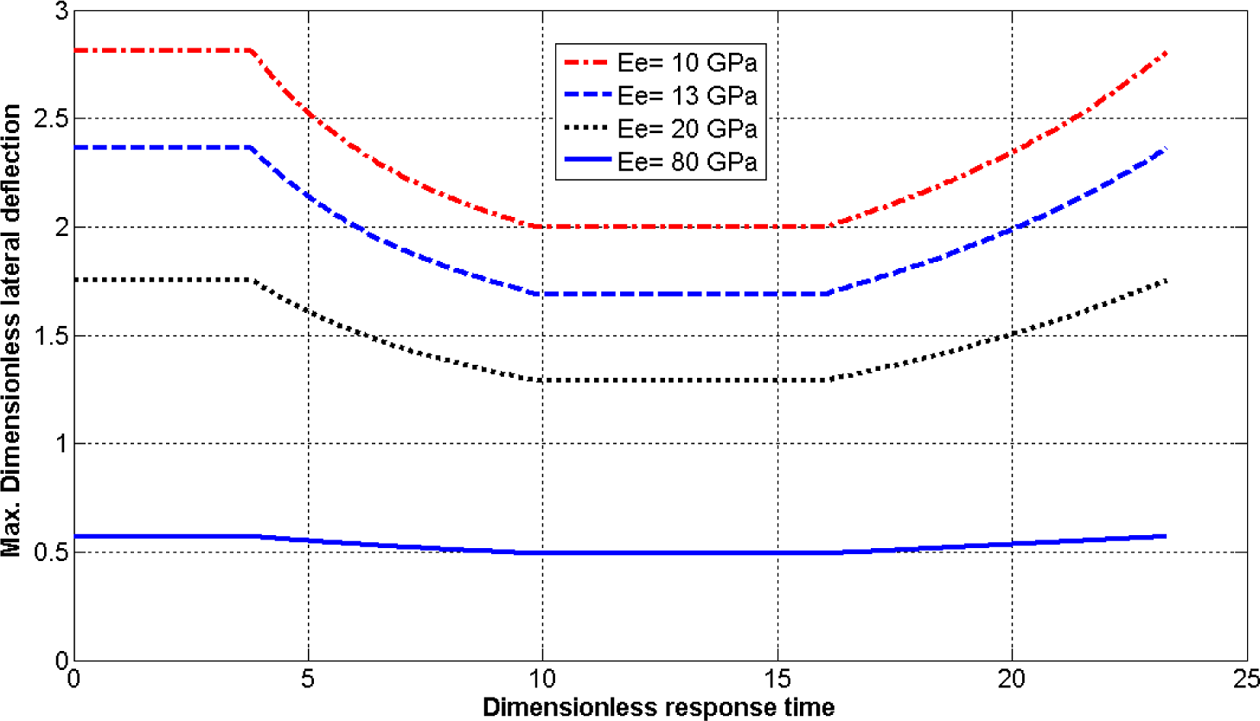
Effect of Young’s modulus of plate core (Ec
) on the plate dimensionless response time and maximum deflection
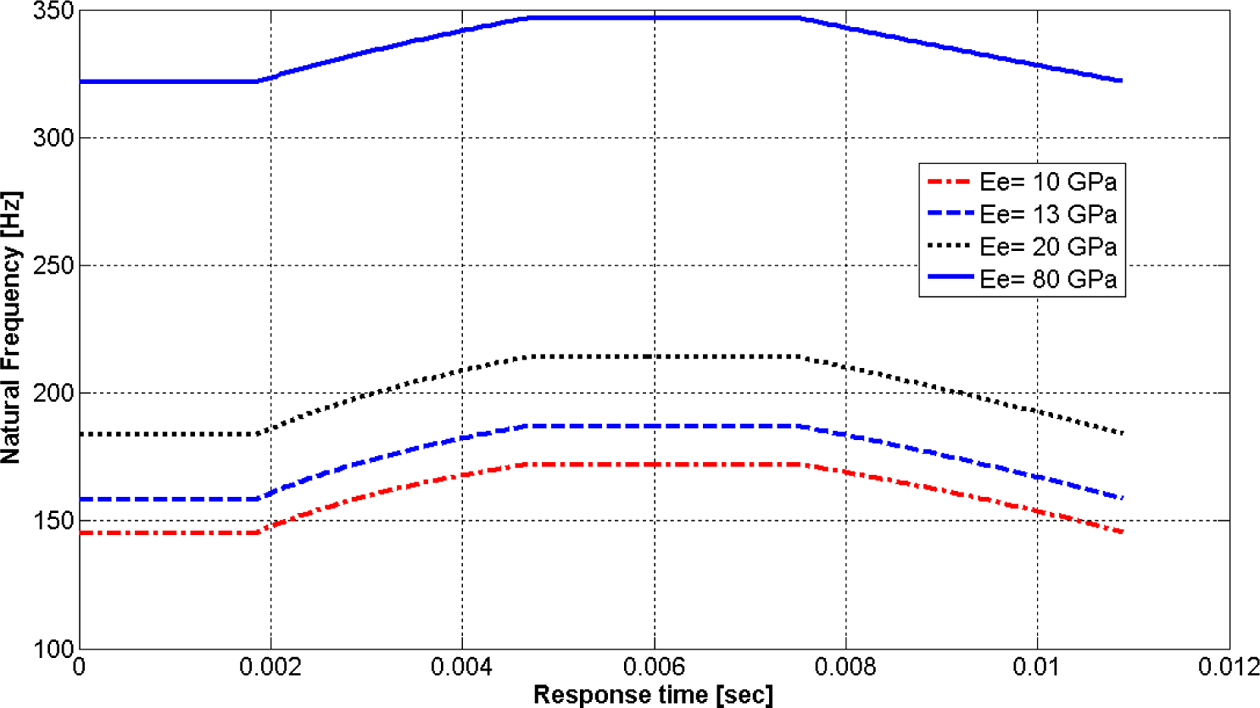
Effect of Young’s modulus of plate core (Ec ) on the response time and natural frequency.
The natural frequency is calculated during the transformation between martensite and austenite phases. The coupled of non-linear governing equations is decoupled by substituting the initial value of
Effect of SMA thermal expansion
The lateral deflection is decreased in the heating stage and increased in the cooling stage. The temperature of the SMA layer is varied in the heating–cooling cycle as illustrated in Figure 5, while the temperature of the core layer is considered constant. Figure 12 shows the lateral deflection of SMA-laminated cantilever plate before and after with and without thermal expansion effect. It is clear that the activation decreases the deflection, and taking the thermal expansion effect into consideration adds an additional decrease of the deflection. While Figure 13 shows the effect of thermal expansion on the response time and the deflection of the cantilever plate at the free end. It is clear that the thermal expansion decreases the deflection without affecting the time response. The reason of that is that at the staring temperature (Mf ) the SMA layer is at martensite phase. Applying the transverse load in the positive z-direction causes the plate to be deformed upwards. While heating from Mf to As , the temperature of the SMA layer increases as seen in Figure 5, which causes the SMA layer to expand. Since this layer is positioned at a distance above the midplane, its expansion will produce an axial force above the neutral axis, which acts as a moment that forces the plate to deform downward to decrease the deformation gradually with heating under the same applied transverse load.
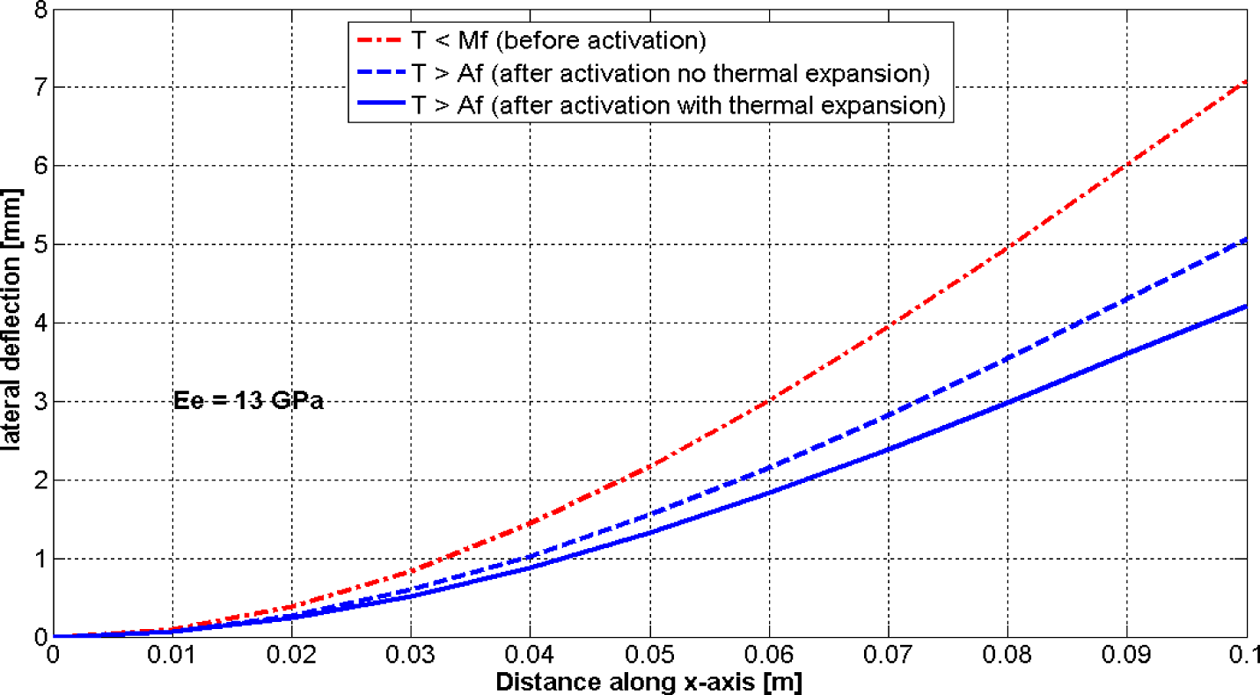
Lateral deflection of SMA-laminated plate before activation (T < Mf ) and after activation (T > Af ) with and without thermal expansion effect. SMA: shape-memory alloy.
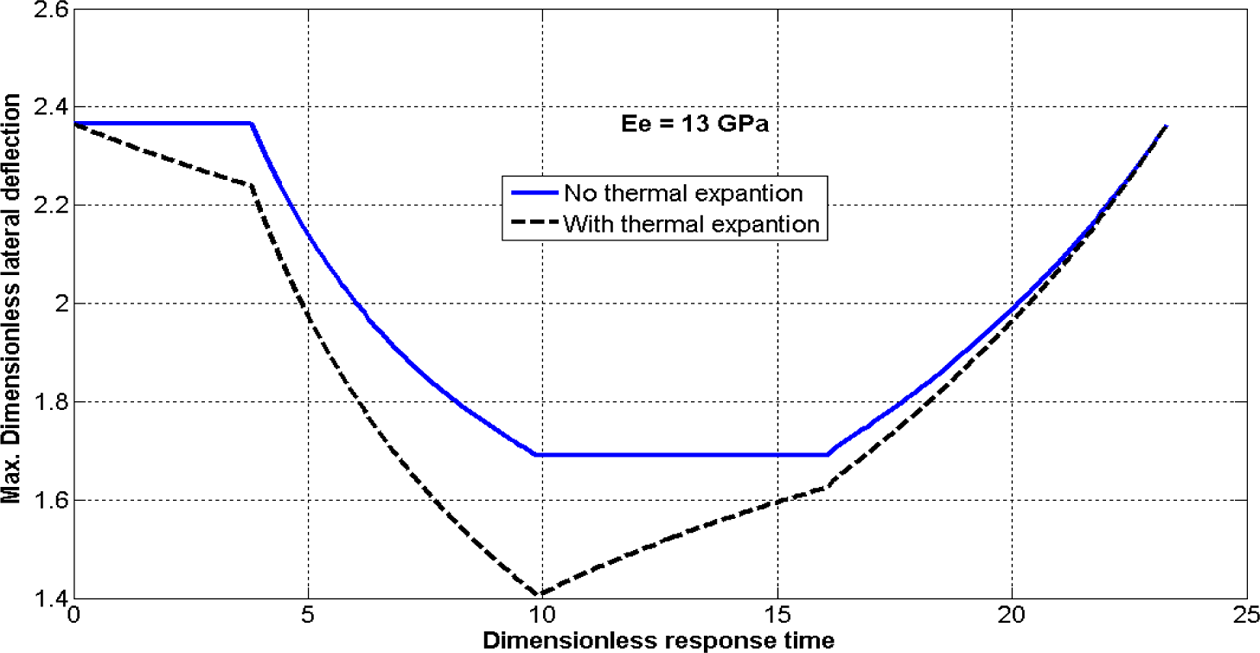
Effect of thermal expansion on the dimensionless response time and the maximum dimensionless deflection
Thus, heating from Mf to As has no effect on the SMA phase, it is still at martensite phase. The decrease in deformation is due to thermal expansion only. Once the temperature reaches As , the SMA layer starts to transform from martensite phase to austenite phase, which means gradual increase in the modulus of elasticity of the SMA layer and the total stiffness of the plate and subsequently causes a gradual decrease in the plate deflection until the temperature reaches Af . After the plate is completely transformed to the austenite phase, it has the minimum deflection reached in the heating cycle. At Af , no more heating power is added and the heat sink decreases the temperature gradually. Cooling from Af to Ms will not affect the SMA layer phase but will cause thermal contraction. This contraction produces an axial compression force positioned above the neutral axis, which acts as a moment that forces the plate to deflect upwards, which means that the deflection increases gradually while cooling.
The cooling after Ms causes the SMA layer to be transformed to austenite phase, this gradually decreases the modulus of elasticity from EA to EM . Thus, the total stiffness of the plate also decreases causing more deflection under the same applied transverse load. The heat cycle is finished at Mf , while the deflection has the maximum value.
It is obvious that if the transverse load is downwards or the SMA layer is positioned at the bottom of the plate, the thermal expansion effect will be inverted. This means that heating increases deflection and cooling decreases deflection.
Figure 14 shows the effect of Young’s modulus of core (Ec ) on the lateral deflection of the plate after activation (T > Af ) with thermal expansion effect. Figure 15 shows the effect of Young’s modulus of core (Ec ) on the response time and the maximum deflection of the plate at the middle of the plate free end with thermal expansion effect.
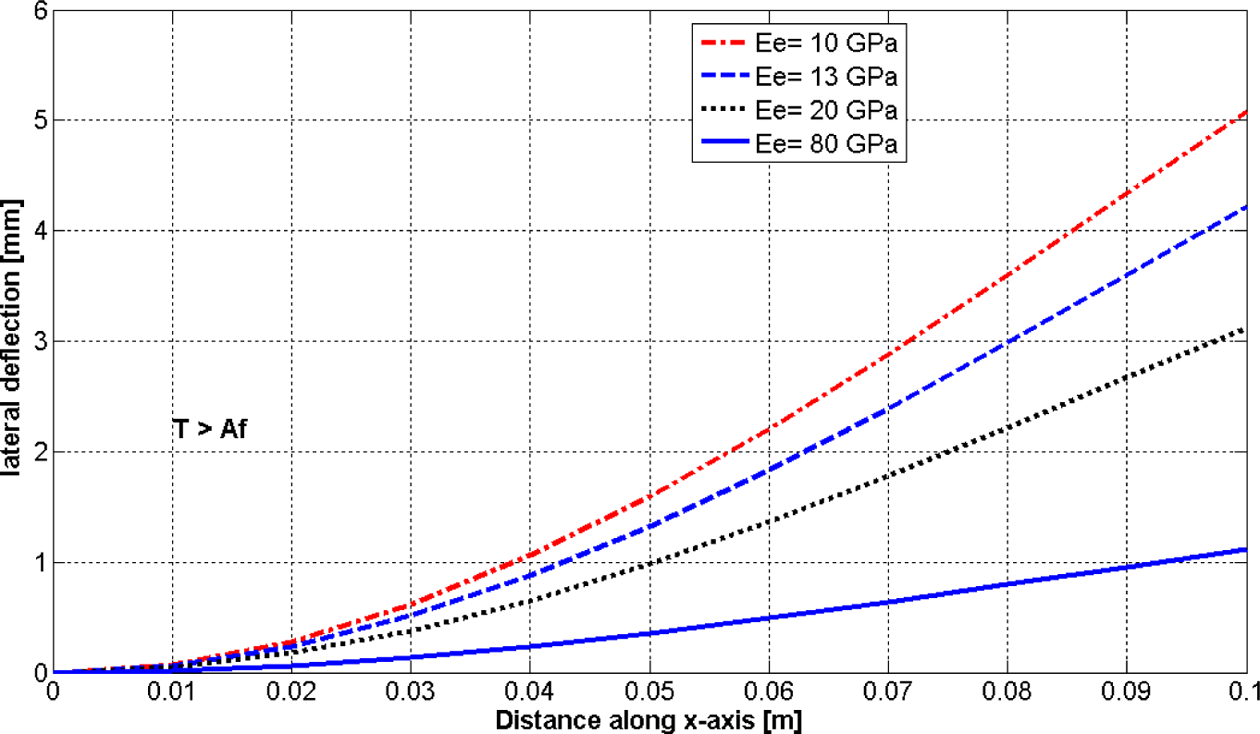
Effect of Young’s modulus of plate core (Ec ) on the lateral deflection after activation (T > Af ) with thermal expansion effect.
Effect of Young’s modulus of plate core (Ec
) on the dimensionless response time and the maximum dimensionless deflection
Effect of the SMA layer thickness
The effect of the SMA layer thickness on the response time, plate deflection, and natural frequency, a plate with the same value of the total thickness h = 3 mm, four values of SMA layer thickness (ts
) are chosen such that (ts
/h = 0.1, 0.2, 0.3, and 0.4). Figure 16 shows SMA thickness effect on the temperature response of the plate in the heating–cooling cycle. Figure 17 shows the SMA thickness effect on the variation of the martensite fraction with response time of the SMA-laminated cantilever plate in the heating–cooling cycle. Increasing the SMA layer thickness will decrease and increase the response time during heating and cooling, respectively. Actually increasing the SMA thickness (ts
) with the same total thickness (h) means decreasing the core thickness (te
). Both (ts
) and (te
) affect the time response. As seen in the energy balance equation (40), the only term affected with the change of (ts
) and (te
) is
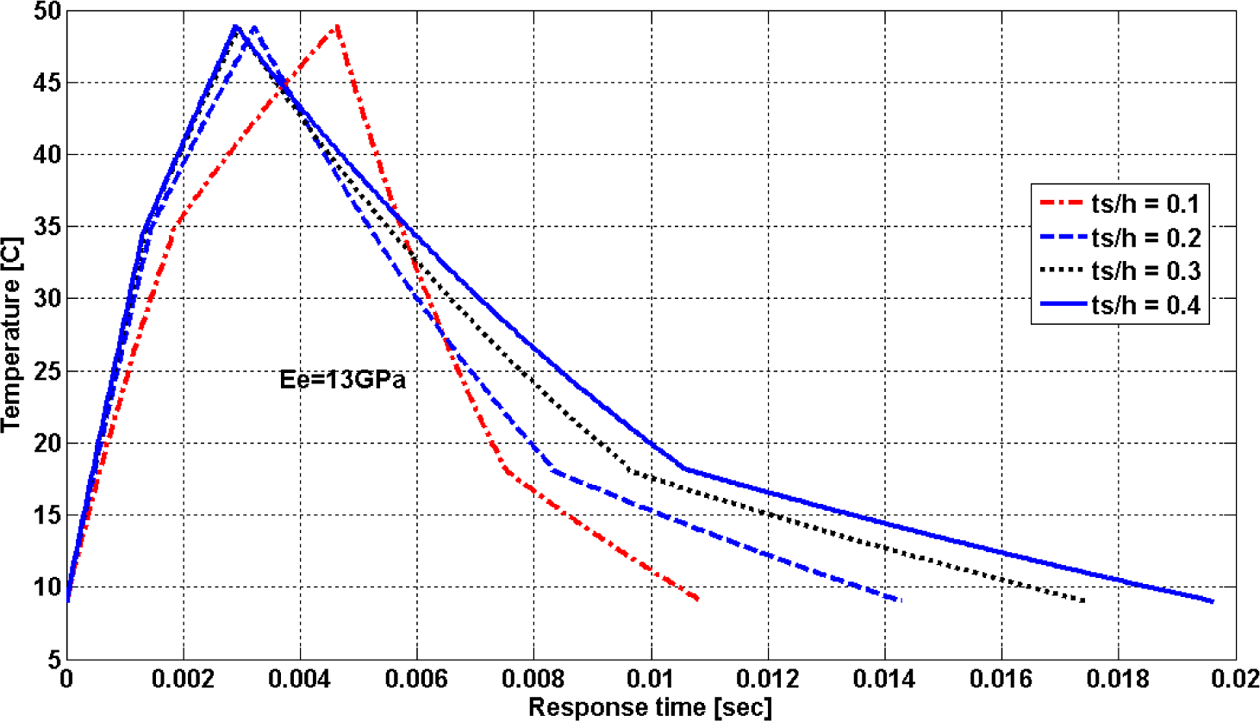
SMA thickness effect on the temperature response of the SMA layer in the heating–cooling cycle with input power P = 2 × 107 W/m3. SMA: shape-memory alloy.
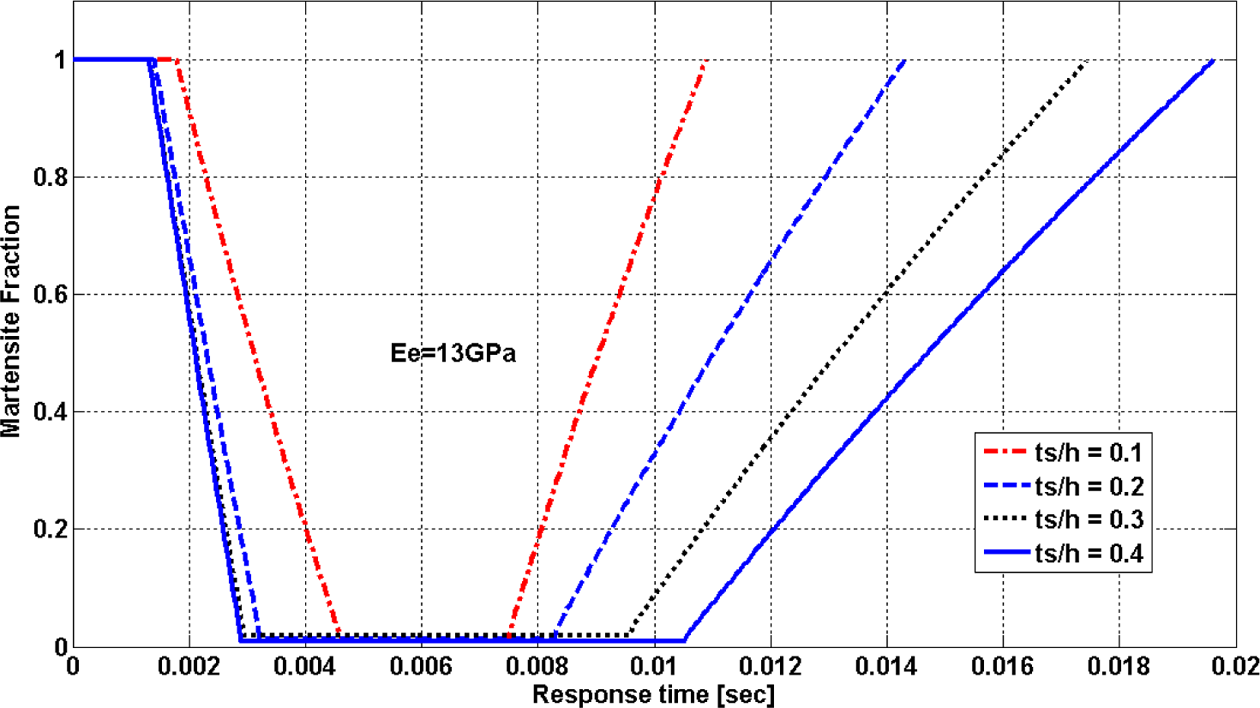
SMA thickness effect on the variation of the martensite fraction with time response of the SMA layer in the heating–cooling cycle with input power P = 2 × 107 W/m3. SMA: shape-memory alloy.
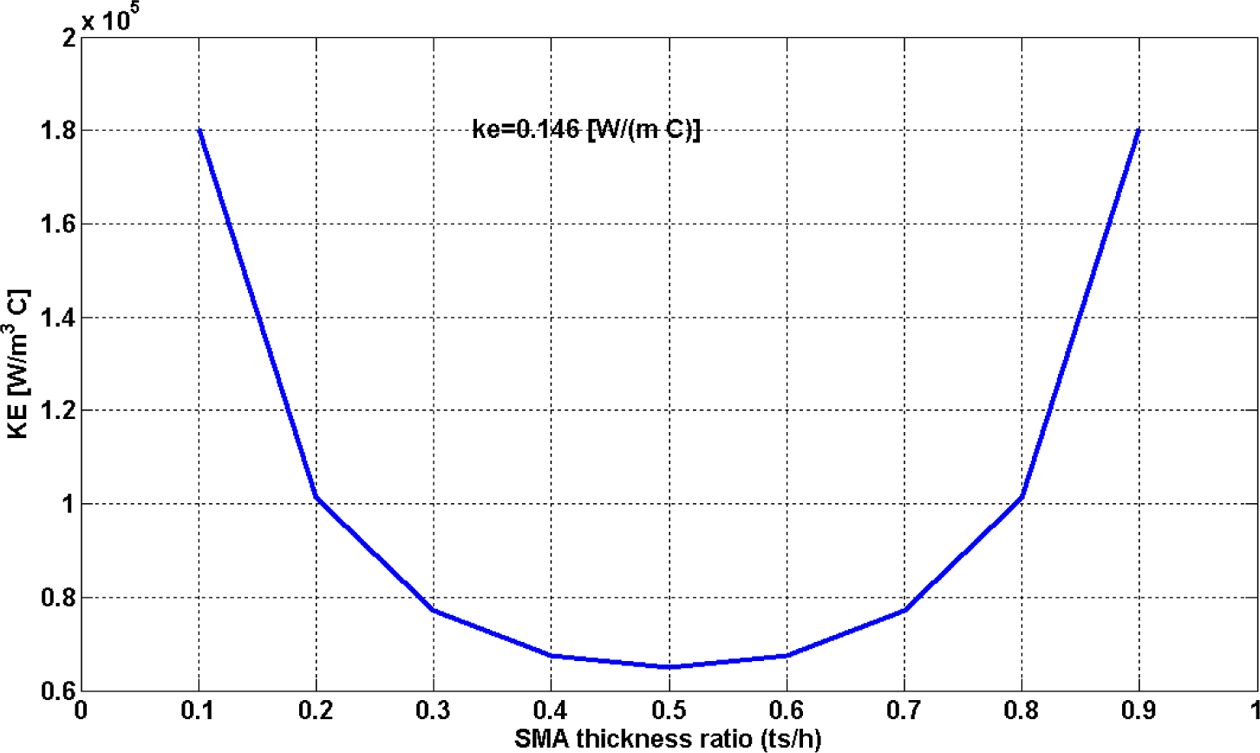
SMA thickness ratio (ts /h). SMA: shape-memory alloy.
Figures 19 and 20 show the SMA thickness effect on the lateral deflection of SMA-laminated cantilever plate before and after activation, respectively. Figures 21 and 22 show SMA thickness effect on the response time and the maximum deflection of SMA-laminated cantilever plate at free end with dimensions and dimensionless values, respectively. It is obvious that increasing the SMA layer thickness decreases the plate deflection; this is because of increasing the stiffness of the plate with increasing the SMA thickness ratio. Figure 23 shows the SMA thickness effect on the response time and natural frequency of the proposed cantilever plate. The natural frequency decreases with increasing the SMA thickness ratio, this is because increasing the SMA thickness increases both stiffness and mass of the plate. However, the mass of the plate increases more than its stiffness does, which decrease the natural frequency of the plate.
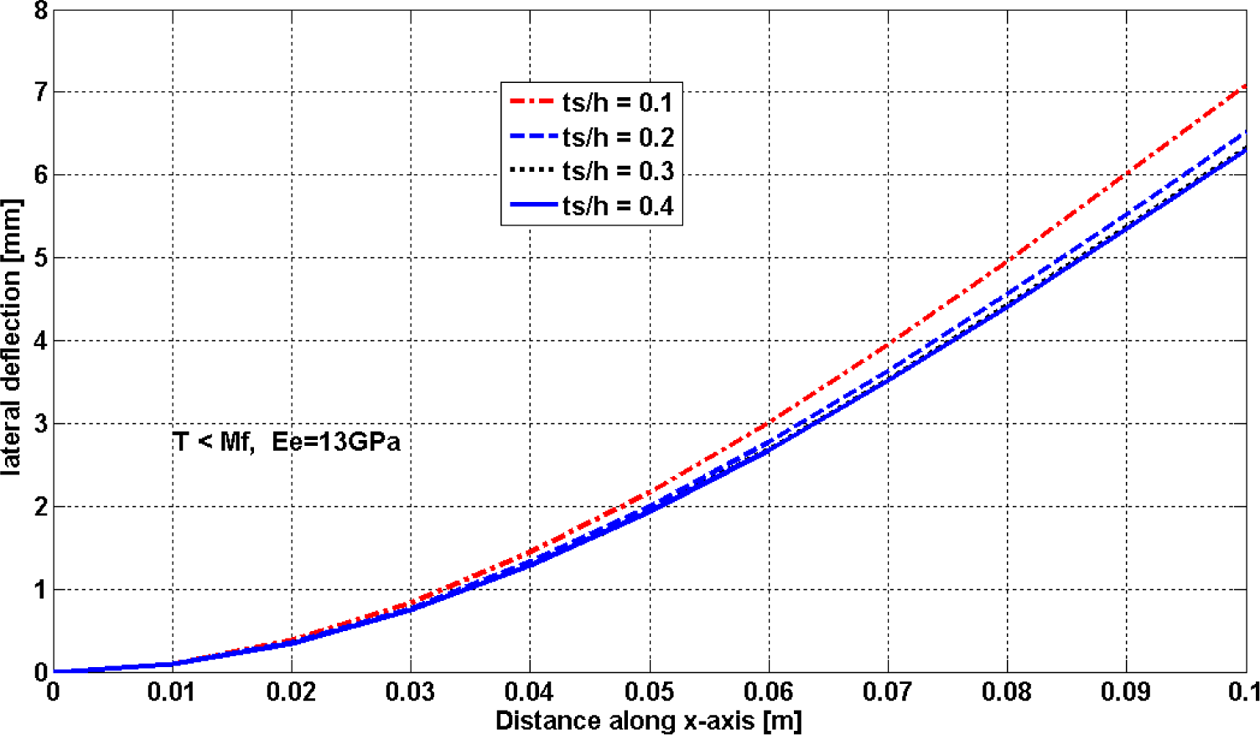
SMA thickness effect on the lateral deflection of the plate before activation (T < Mf ). SMA: shape-memory alloy.
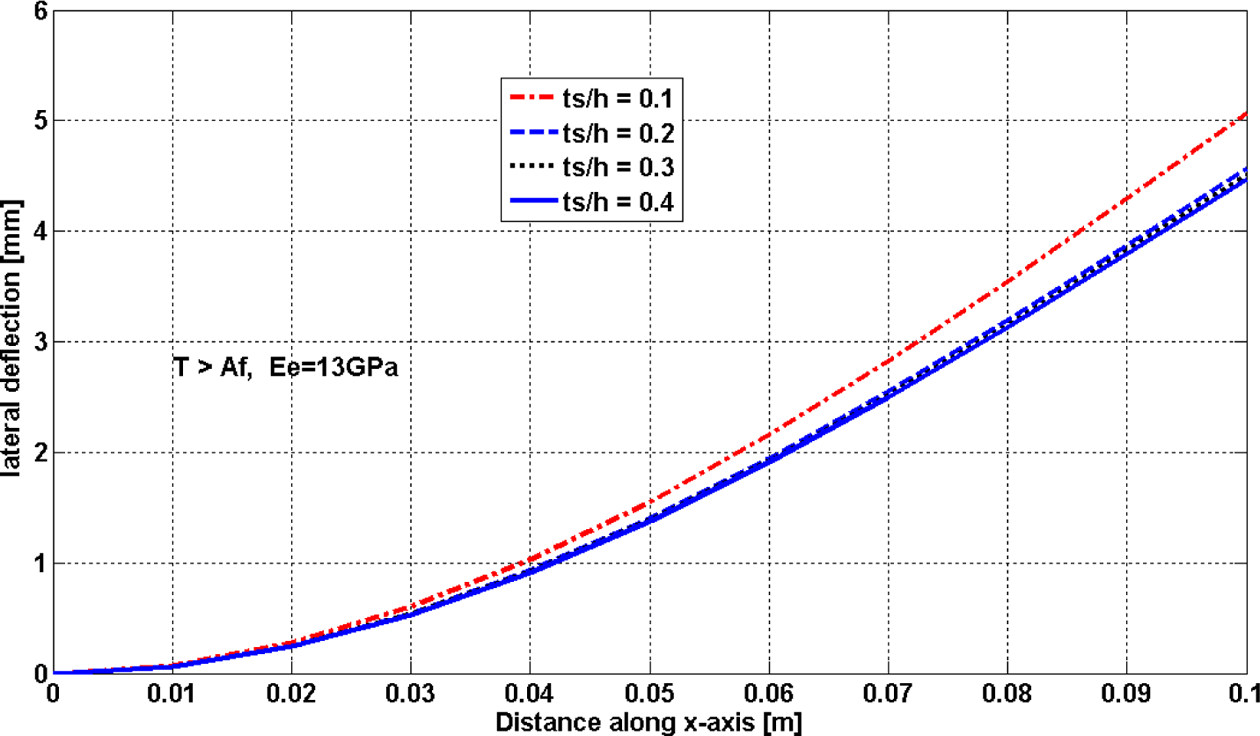
SMA thickness effect on the lateral deflection of the plate after activation (T > Af ). SMA: shape-memory alloy.
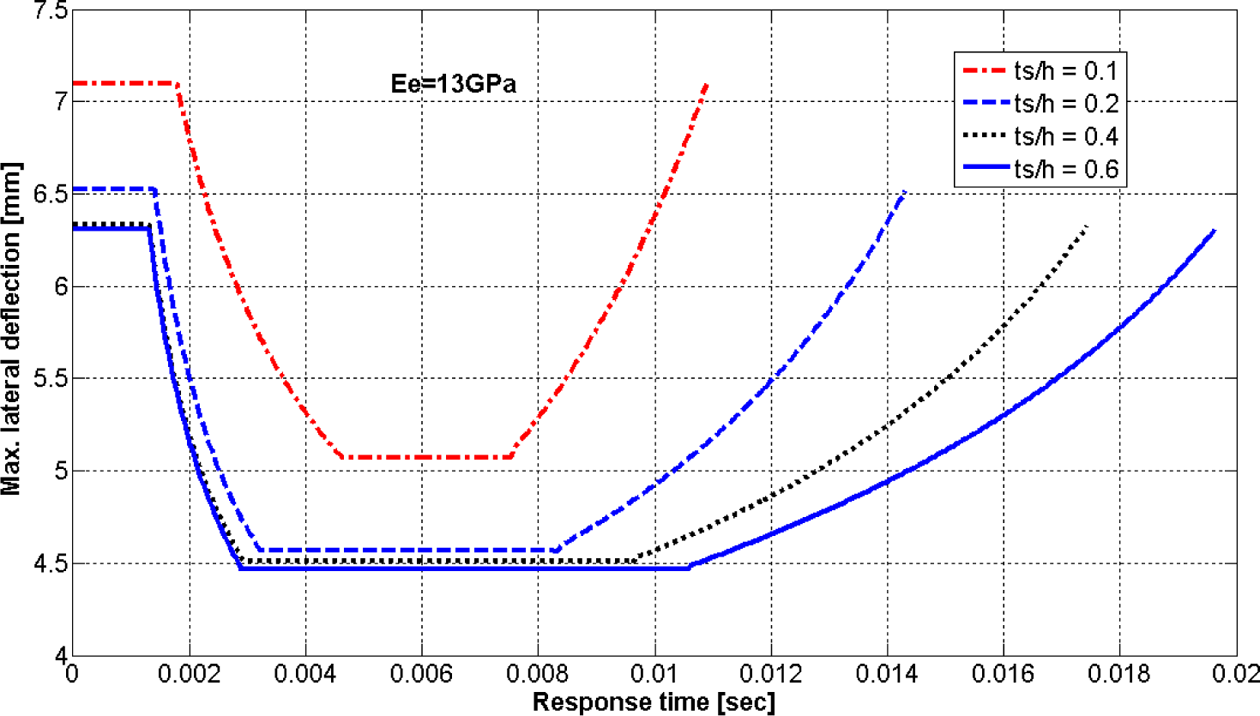
SMA thickness effect on the response time and the maximum deflection of the plate at free end (x = a and y = b/2). SMA: shape-memory alloy.
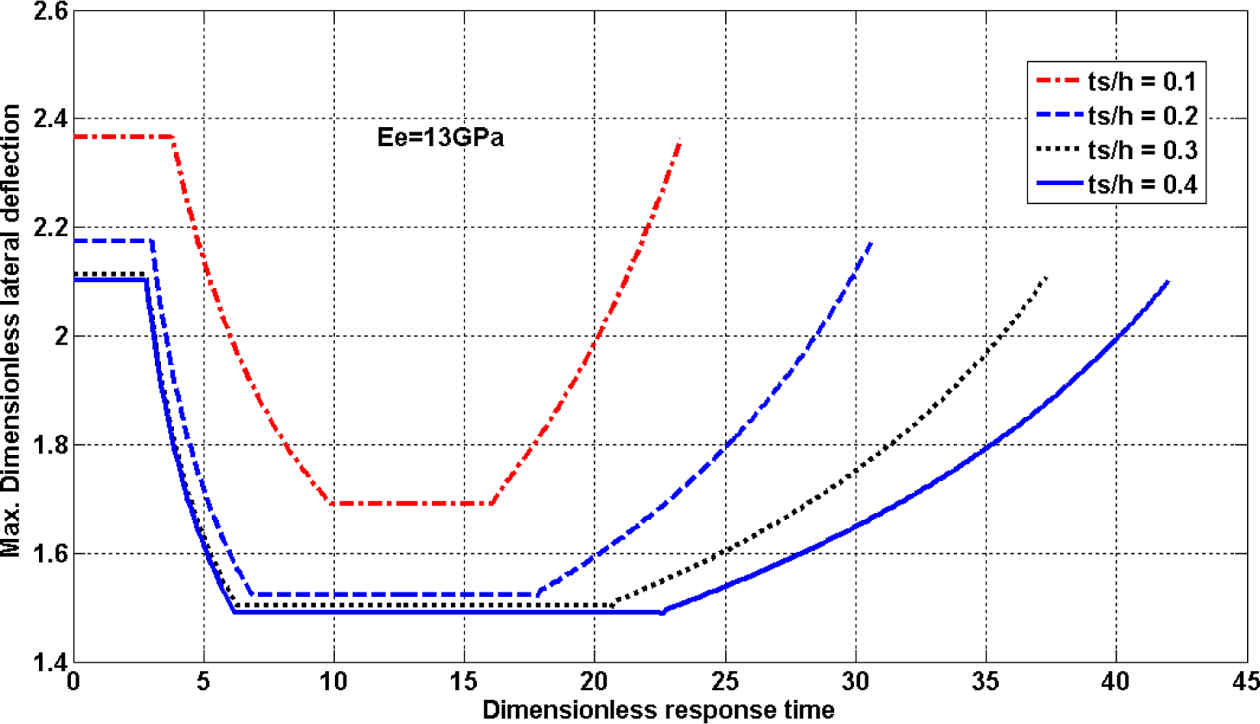
SMA thickness effect on both dimensionless response time and the maximum deflection
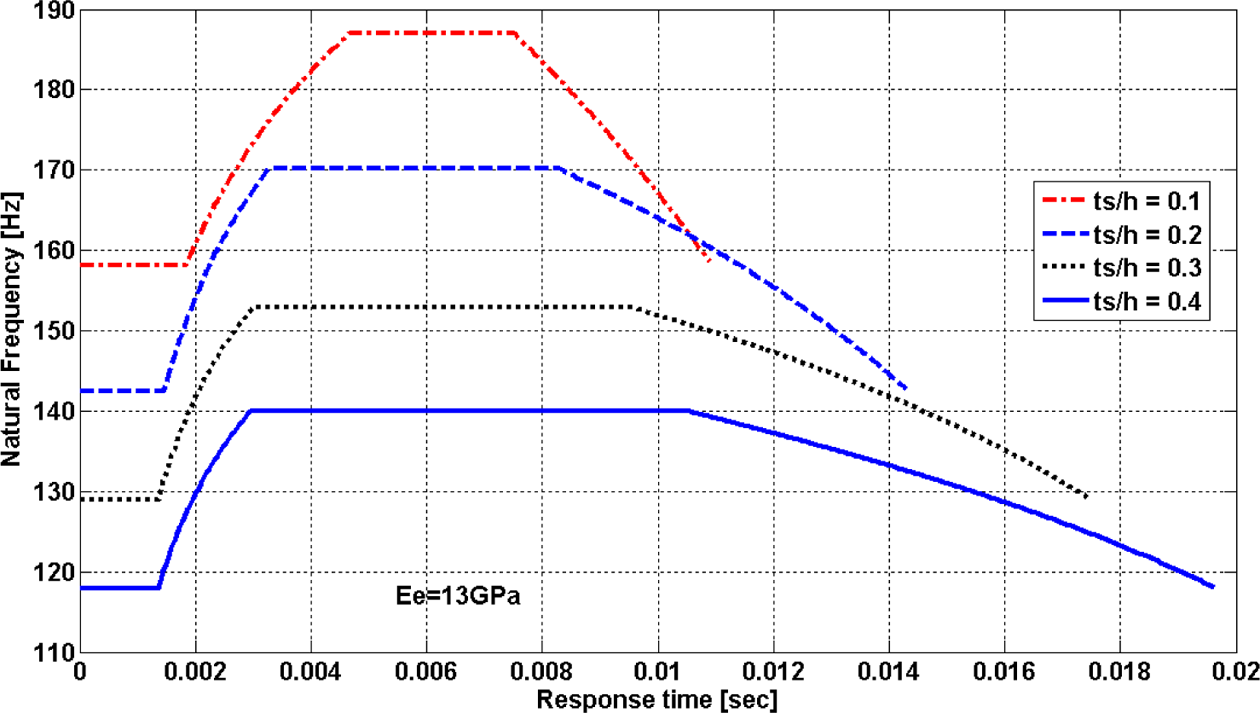
SMA thickness effect on the plate response time and natural frequency. SMA: shape-memory alloy.
Effect of plate aspect and thickness ratios
To study the effect of the plate aspect ratio (a/b) and the thickness ratio (a/h) on the plate deflection and natural frequency, four values of (a/b = 1, 2, 3, and 4) are chosen and a four values of (a/h = 10, 20, 50, and 100) are chosen. The plate length is taken constant (a = 0.1 m) and the SMA thickness ratio is taken constant (ts
/h = 0.1; Figure 4). The plate is loaded with a distributed load (q = 500 N/m2). The maximum lateral deflection 
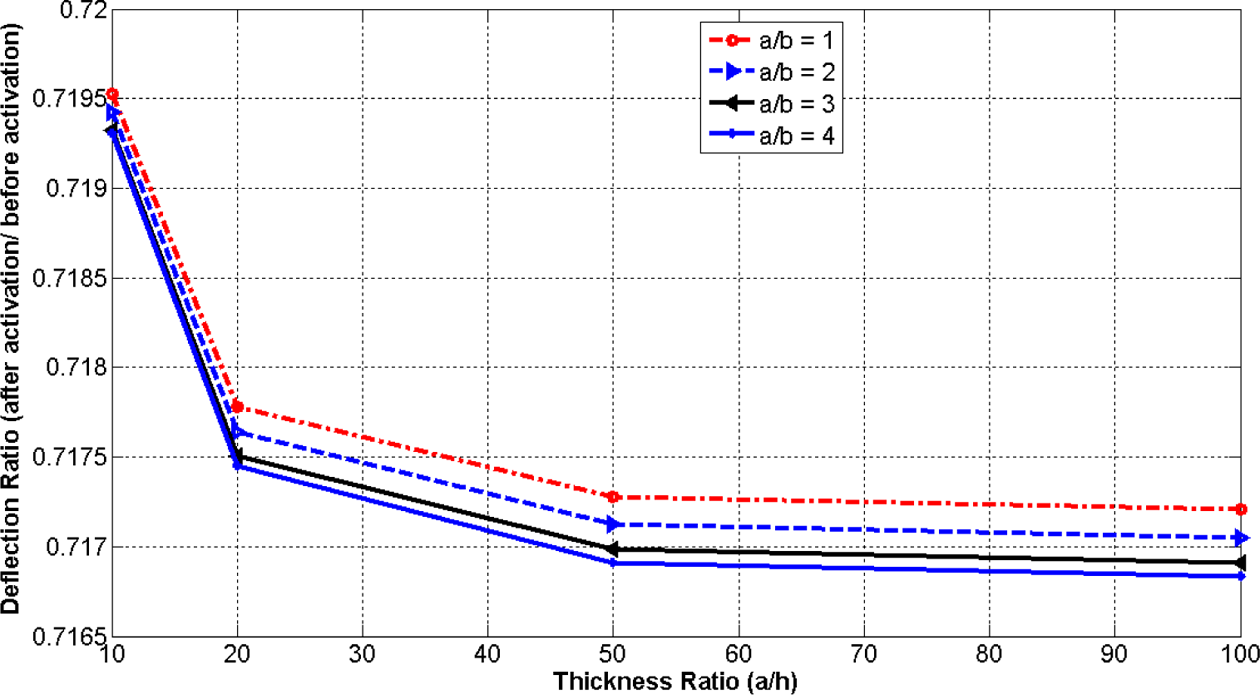
The effect of plate thickness ratio (a/h) and aspect ratio (a/b) on the deflection activation ratio (w after activation/w before activation).
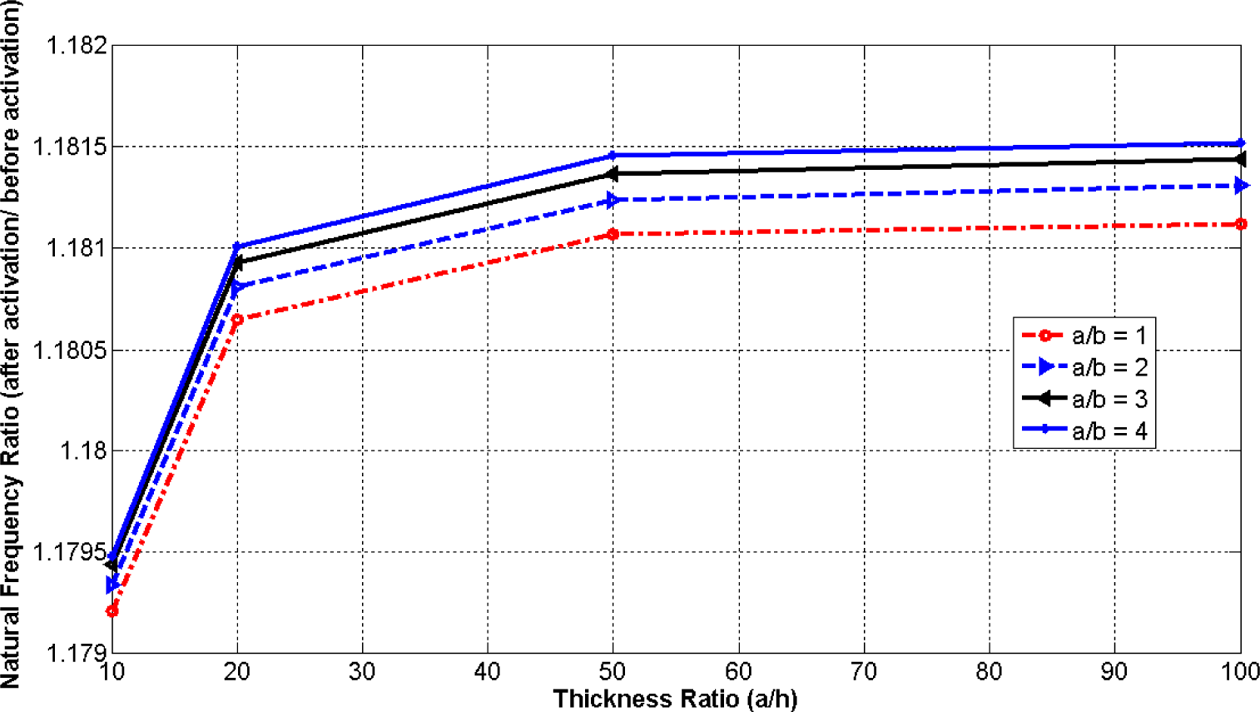
The effect of plate thickness ratio (a/h) and aspect ratio (a/b) on the natural frequency activation ratio (ω after activation/ω before activation).
Conclusion
The static response, the dynamic characteristics, and the time response of the SMA-laminated composite plates are obtained. A two-dimensional nonlinear transient analysis of thermally driven composite elastomer plate with SMA sheet bonded on its surface was presented.
The energy balance equation was utilized to solve the temperature distributions of the SMA layer. The time response of the proposed plate and the deflection as well as natural frequencies before and after activation of the SMA plate were computed.
Parametric studies have been performed and the following conclusions have been drawn: The lateral deflection of the plate is decreased with the activation of the SMA layer due to the increase of the Young’s modulus of the SMA layer in the austenite phase. Increasing the core material stiffness causes decreasing in deflection without affecting the time response. Increasing the SMA layer thickness obviously decreases the response time during heating, and increases it during cooling until the SMA thickness becomes equal to the core thickness Increasing the SMA layer thickness decreases both the plate deflection and natural frequency which depend on the ratios of stiffness and mass properties of SMA and core materials. Increasing the plate thickness ratio (a/h) decreases the deflection activation ratio and increases the natural frequency and activation ratio which means that as the plate becomes thinner, it is more response to the SMA activation. As the plate aspect ratio (a/b) increases a larger response to the SMA activation is obtained. The plate deflection is affected by thermal expansion coefficient without affecting the time response according to the location of the SMA sheet away from the neutral axis and the transverse force direction.
Footnotes
Appendix 1
1-A. The compliance matrix of the SMA layer
1-B. The evolution equations of Brinson’s model
Appendix 2
2-A. The non-zero terms of
2-B. The non-zero terms of
2-C. The used column vectors of the Ritz approximation functions for simply supported boundary conditions are:
2-D. The used column vectors of the Ritz approximation functions for a cantilever plate are:
Appendix 3
3-A. The non-zero terms of
3-B. The non-zero terms of
Appendix 4
Dimensionless parameters of heat equations
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.