
Abstract
Long glass fiber-reinforced polypropylene composites (LGFPP) are widely used in the industrial field, especially in automotive applications, due to their excellent mechanical properties and low cost. This article focuses on obtaining optimal mechanical properties of LGFPP for different objectives. The primary objective is to minimize the cost of the composite. The other objective is to obtain specific, desired properties of the composite (irrespective of the composite cost). The latter case is useful in designing products where quality of the composite cannot be compromised (while the cost of the composite is secondary). The properties that were optimized include tensile Young’s modulus, flexural Young’s modulus, and notched Izod impact. Surrogate models were obtained and used to predict these properties as functions of corresponding compositions of the composites. Furthermore, optimization framework that employs these models either as constraints or as objective functions was developed with the aim of developing tailored fiber-reinforced polypropylene. All simulations are programmed using MATLAB version 7.10.0 (R2010a).
Introduction
In recent decades, huge demands of polypropylene in automotive industries and related applications have generated a new major field of polymer science that has rapidly grown and progressed to particulate composites for different applications. Of utmost interest is the modification of the commercial polymers to improve their mechanical properties and increase their shelf life. Simultaneously, there has been great attention to the behavior of the micromechanical parameters and their measurements in order to have a better understanding of the structure–property relationships in such composites. The orientation factor, fiber content, fiber length, strength, aspect ratio, and interfacial strength are some of the major significant variables that influence the thermoplastic composite properties produced by injection molding. 1 –9 There are many different models that have been proposed for the prediction of stiffness and strength behavior. In general, the rule of mixtures is used to model these properties of fiber-reinforced thermoplastic composites. 1 –5,8 Another approach is based on the concept of Eshelby–Mori–Tanaka model with experimental characterization of fiber orientation distribution and fiber length. Such a methodology was developed by combining process modeling and micromechanical modeling. This technique is applied to determine the elastic stiffness properties of long-fiber thermoplastics (LFPP) produced by the injection molding method. 6,10 –12 Monte-Carlo technique has been used to develop a new numerical procedure for predicting the elastic and thermoelastic properties by generating aligned fiber microstructures that are randomly nonoverlapping, including distribution of fiber lengths. 13 In addition, a numerical simulation of the generated microstructures has been performed, where the simulation results apparently agreed with the predictions of the Tandon–Weng model. Later on, the same method was performed to generate a randomly oriented fiber microstructure. 13 –15
In this study, regression models were generated from the reported experimental data that describe the mechanical properties behavior. Regression models are used in simulations rather than the more elaborate and complex model (explained before) for two reasons. The first reason is that the models described earlier have many parameters that are highly sensitive and involve significant uncertainty in their estimates (e.g. in estimation of free-performing orientation factor and interfacial shear stress with long glass fiber as a filler). Second, regression models are amenable to perform optimization studies in a computationally tractable manner.
Proposed regression models
Least square approach was used to generate polynomial regression models for the mechanical properties of long glass fiber-reinforced polypropylene (LGFPP) composite. The properties of interest include tensile modulus, flexural modulus, and notched Izod impact. These were modeled based on the weight of glass where the fiber content range was between 0 and 73 wt%. The experimental data that were used in modeling were collected from Thomason.
3
The following equation represents the general form of a kth order polynomial.

where yi is the mechanical property, xi is the weight fraction of fiber glass, and ai s are the intercept, linear effective parameter, and higher order effect parameters,. 16 It was observed that the effect of cross terms (of type xixj , where xi and xj are different factors) was negligible and hence they are not included in the model described by equation (1).
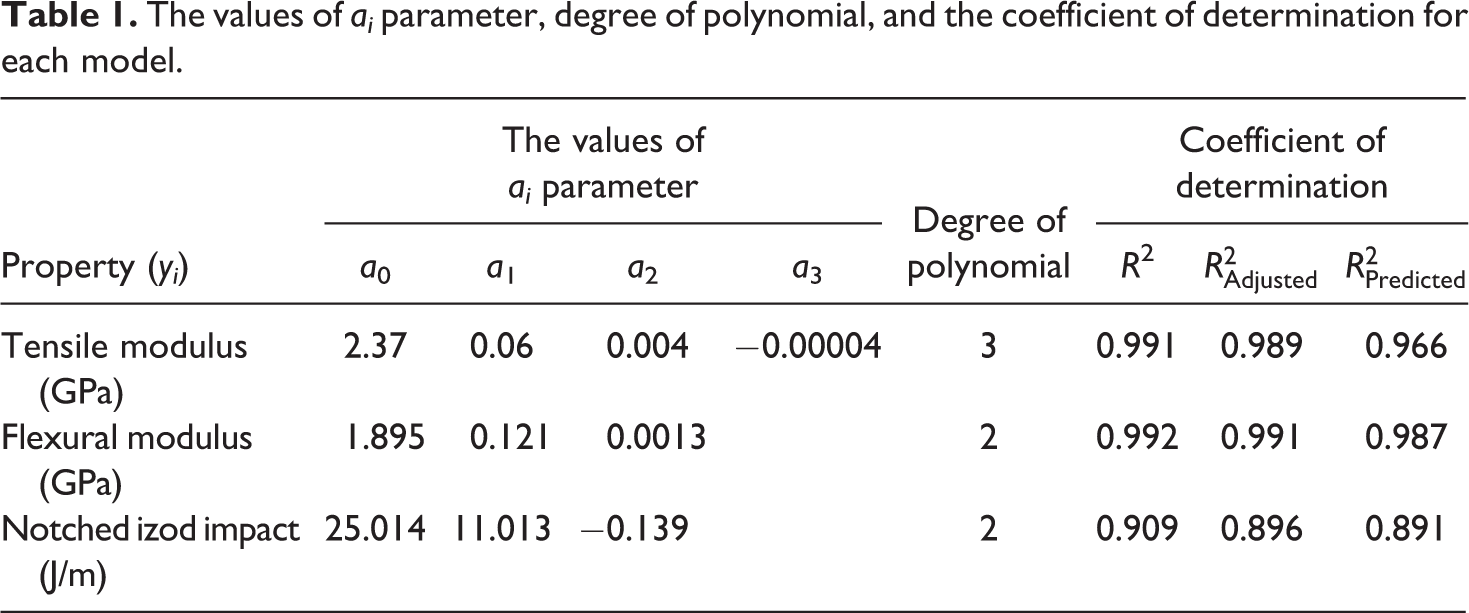
Table 1 shows the values of the ai parameters for each model of the mechanical property as well as the degree of polynomial. It also shows the coefficient of determination values that reflect the accuracy of the models in predicting new data.
The values of ai parameter, degree of polynomial, and the coefficient of determination for each model.
Optimization procedure
The methods described by Levenberg and Marquadt
17,18
were used in performing the optimization to produce a new composite product with predefined properties. Two problem categories were undertaken; in the first category, the objective function was set to minimize the cost of the composite (see equation (2)) while using the mechanical properties expressed in the regression models as constraints (as shown in equations (3) and (4)). The minimum and maximum amounts of corresponding composite ingredients are used as lower and upper bounds. The optimization problem, in general, is represented as:
where x is a column vector, that is, [x
1, x
2, … xn
]
T
, gi
corresponds to g
1, g
2, … gj
inequality constraints and hi
corresponds to h
1, h
2, …, hk
equality constraints, f(x) is the cost function that is obtained from the sum of cost of components of a given composite and is given by equation (2) below:
Subject to:

where Ci
is the costs of the different components in the molding process, gi
is a vector of inequalities of dimension m
1, hk
is a vector of equalities of dimension m
2, and hence the total number of constraints is
In the second approach, an inverted model technique was applied to generate the best combination of composites for two or more properties by minimizing the variance between the predicted model and the desired value where the objective function is defined as follows:
where
MATLAB software version 7.10.0.499 (R2010a; MathWorks) was used for performing optimization simulations.
Results and discussion
Model accuracy
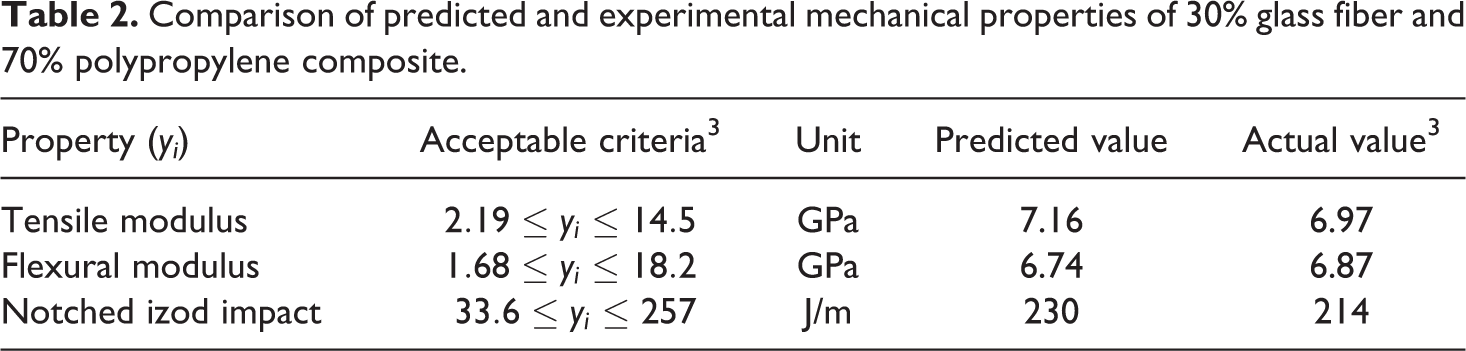
A function in MATLAB software was formulated to predict the desired properties. Furthermore, the accuracy of this function (which in turn is the model for LGFPP composite) was validated with the available experimental data. Table 2 shows that, for the composite with 30% of glass fiber and 70% of polypropylene, the predicted values and the actual values of almost all properties are reasonably close to unity.
Comparison of predicted and experimental mechanical properties of 30% glass fiber and 70% polypropylene composite.
Minimizing the cost of LGFPP
Simulation runs for different combinations of tensile modulus, flexural modulus, and Izod impact were carried out. Each time, one of the variables was held constant, while the other two were varied. The testing range of tensile modulus was between 4 and 14 GPa, while the flexural modulus was from 4 GPa to 18 GPa and the notched Izod impact was in the range of 100–240 J/m.
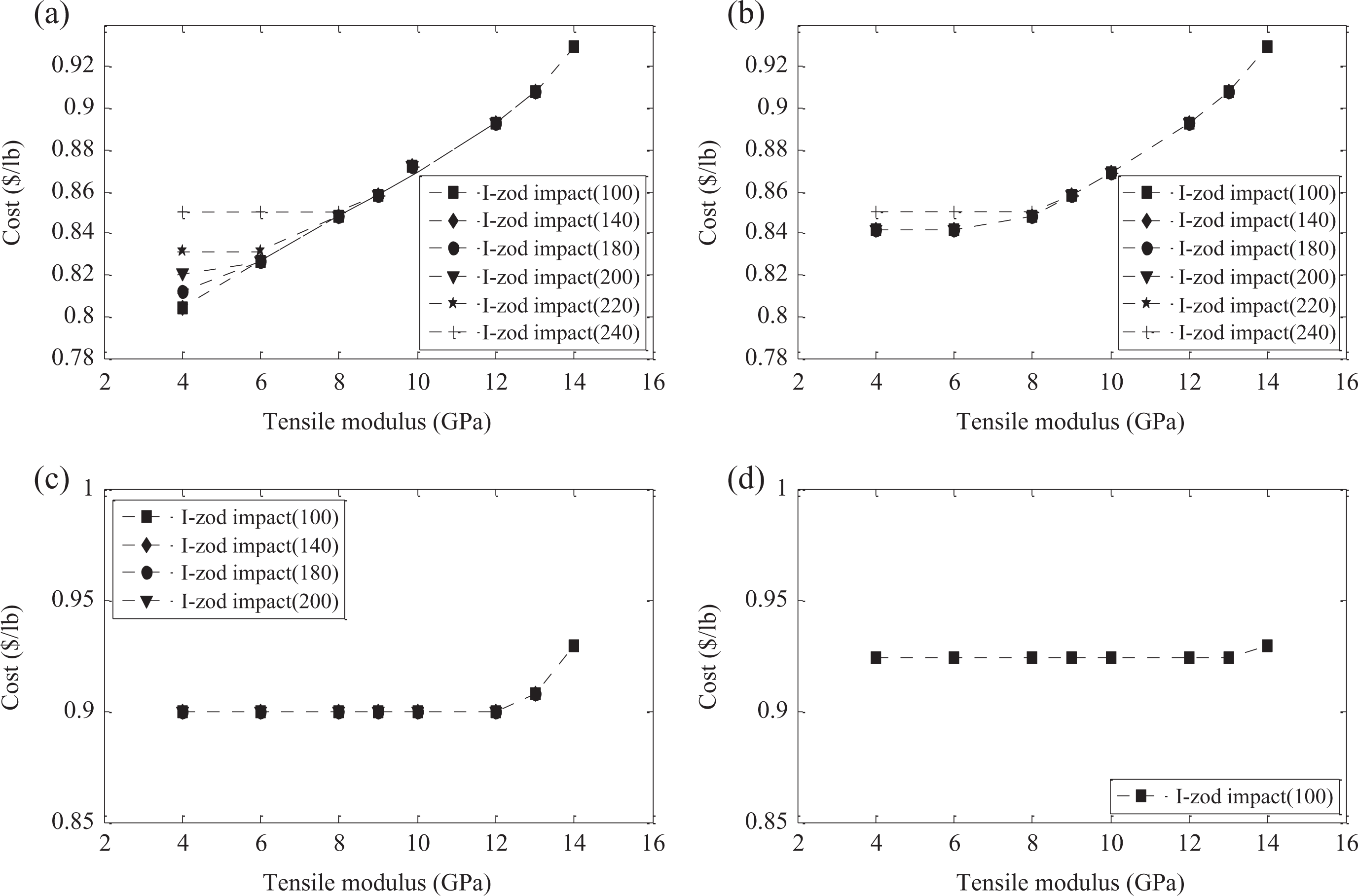
The results of minimum cost as a function of tensile modulus at different flexural modulus are shown in Figure 1 where the Izod impact was held constant at different levels. In Figure 1(a) with Izod impact at 100 J/m, it was observed that the cost of the composite remains the same at different levels of flexural modulus; however, the cost would increase with increasing tensile modulus. The starting point of the increase in the cost occurs at a higher value of tensile modulus as the flexural modulus is increased. The reason for the cost to be constant initially and then increasing at certain values is because of the properties being constrained. Basically, if one of the variable’s property values (tensile or flexural) is constrained to a higher value than the other, then the function stops when the higher property value is satisfied. Therefore, whenever the value used is less than the fixed property’s value, the result will be the same and this would keep the cost constant. Once the fixed property’s value becomes equal to or is exceeded by the other property, then the cost starts to increase. There is an exception here, that is, a linear increase when the value of flexural modulus is fixed at 4 GPa, because the tensile modulus value starts at 4 GPa, which means that they are equal. In fact, the values of tensile modulus and flexural modulus that can be obtained for a specified weight fraction are close to each other. It has also been observed that the maximum feasible flexural modulus achieved is 16 GPa as shown in Figure 1.
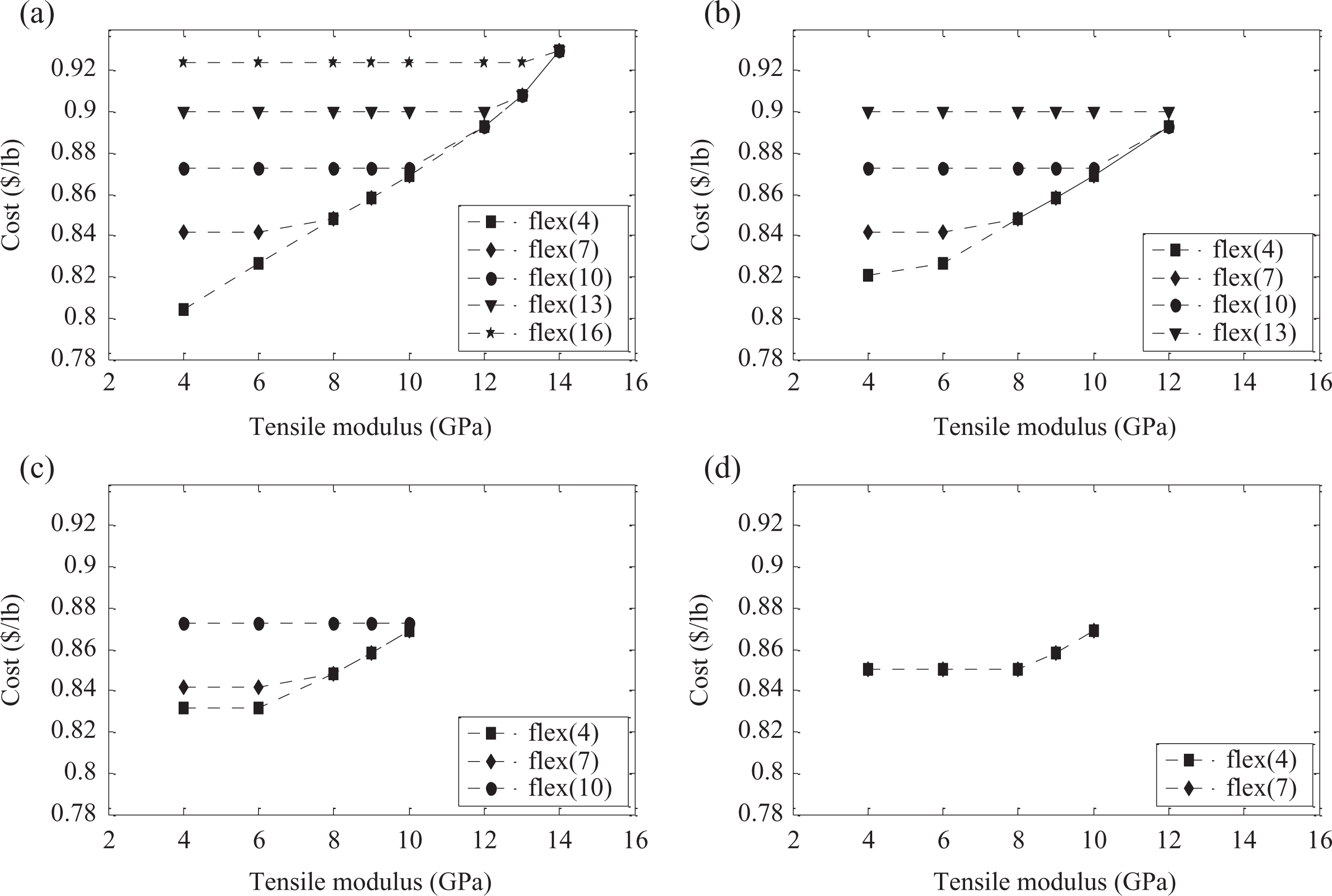
Results of minimizing the cost of LGFPP with constant notched Izod impact is constant and the tensile modulus and flexural modulus (which is represented as Flex.) are variables. (a) Izod impact 100 J/m, (b) Izod impact 200 J/m, (c) Izod impact 220 J/m, and (d) Izod impact 240 J/m. LGFPP: long glass fiber-reinforced polypropylene composites.
Figure 1(b) to (d) follows almost the same pattern as Figure 1(a). It is observed that as the value of Izod impact increases, the higher values of flexural modulus and tensile modulus become infeasible. Also, an increase in Izod impact led to a slow increase in the cost of the composite for flexural modulus that equals to 4 GPa, for example, by comparing the cost of flexural modulus at 4 and 7 GPa at lower values of tensile modulus for constant Izod impact at J/m, the cost was observed to be different; however, increasing Izod impact value causes increase in the cost of flexural modulus at 4 GPa and approaching the cost of flexural modulus at 7 GPa until it became identical with it (as is evident from Figure 1(d)).
The effect of cost on tensile modulus for different values of Izod impact is shown in Figure 2. The minimum cost versus tensile modulus at different flexural modulus values are presented through the charts (a) to (d) in Figure 2. It can be noticed that the cost is slightly increased with increasing the levels of Izod impact in Figure 2(a), but the disparity in cost soon fades away as the flexural modulus increases, and the lines that represent a different value of Izod impact become identical (see Figure 2(b) and (c)). Further, for different values of Izod impact, the cost of the composite increases as the value of the constant (flexural modulus) increases. For example, in Figure 2(a), where the flexural modulus was fixed at 4 GPa, the cost of composite at different levels of Izod impact starts at 0.8 $/lb; however, increasing the flexural modulus to 13 GPa increases the cost and starts at 0.9 $/lb as shown in Figure 2(c).
Results of minimizing the cost of LGFPP where the with constant flexural modulus is constant and the tensile modulus and notched Izod impact are variables. (a) Flexural modulus 4 GPa, (b) flexural modulus 7 GPa, (c) flexural modulus 13 GPa, and (d) flexural modulus 16 GPa. LGFPP: long glass fiber-reinforced polypropylene composites.
Further, it is observed that a combination of high values of all the three properties cannot be achieved simultaneously. For instance, at 16 GPa of flexural modulus, the only combination that can be achieved would be with an Izod impact of 100 J/m with any value of tensile modulus, as shown in Figure 2(d). In the case of flexural modulus being 18 GPa, there is no feasible combination that can satisfy the objective; thus, no product can be achieved with these levels of properties.
Figure 3(a) through (d) shows cost versus flexural modulus for different levels of Izod impact and constant tensile modulus In Figure 3(a), the cost of composite gradually increases for different values of Izod impact with an increase in the flexural modulus, where this increase follows the same trend for all different values of the Izod impact; however, there is a slight difference in the cost with low values for both flexural modulus and Izod impact. The small disparity in cost begins to fade away gradually with the raising of the level of tensile modulus, as illustrated through charts (a) to (c) in Figure 3. Also, raising the tensile modulus value makes it possible for the cost of the composite to gradually approach one and stay steady at different values of flexural modulus; however, there is a little increase with high values of flexural modulus and Izod impact, as can be seen in charts (c) to (d) in Figure 3. Moreover, this increase is accompanied by a limitation of forming a composite that combines high values of the three properties.
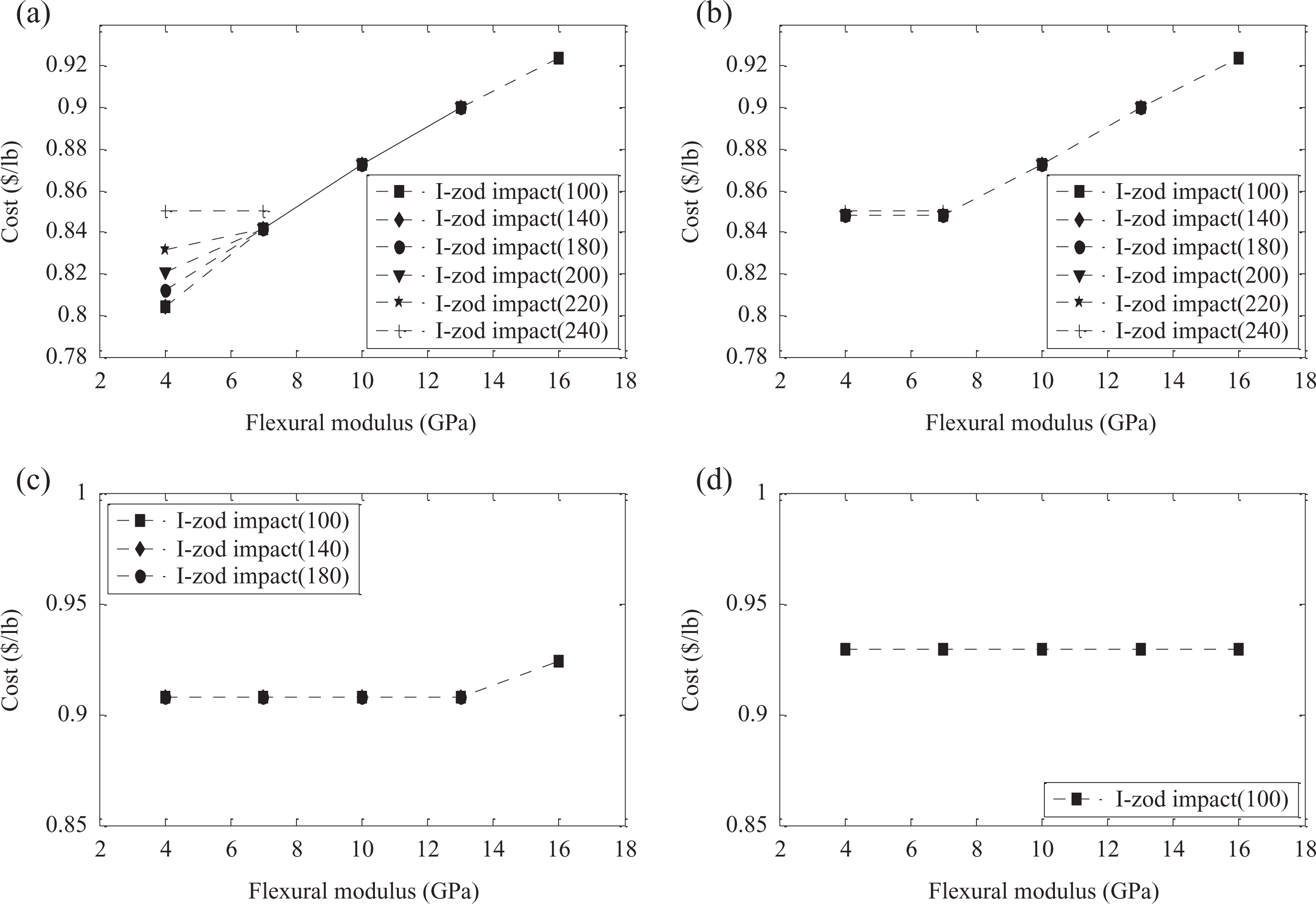
Results of minimizing the cost of LGFPP with constant tensile modulus and the flexural modulus and notched Izod impact (which symbolized as impact) as variables. (a) Tensile modulus 4 GPa, (b) tensile modulus 6 GPa, (c) tensile modulus 13 GPa, and (d) tensile modulus 14 GPa. LGFPP: long glass fiber-reinforced polypropylene composites.
For example, examining charts (b) to (d) in Figure 3 and comparing them with each other, it is observed that the number of combinations begin to reduce as the tensile modulus value increases until only one combination can be formed at 14 GPa, which is the maximum value of tensile modulus as shown in Figure 3(d). The cause of the reduction in number of combinations is that the surface plot of Izod impact model (see Figure 4) takes an inverted U-shape based on the increase of the fiber weight fraction, while the tensile and flexural modulus increase linearly with increasing the fiber weight fraction. The maximum value of Izod impact is 240 J/m, which is located around 45% of fiber glass weight; after this weight, the value of Izod impact begins to decrease. At the same time, the values of tensile and flexural modulus continue to increase with the increase of the weight of fiber.
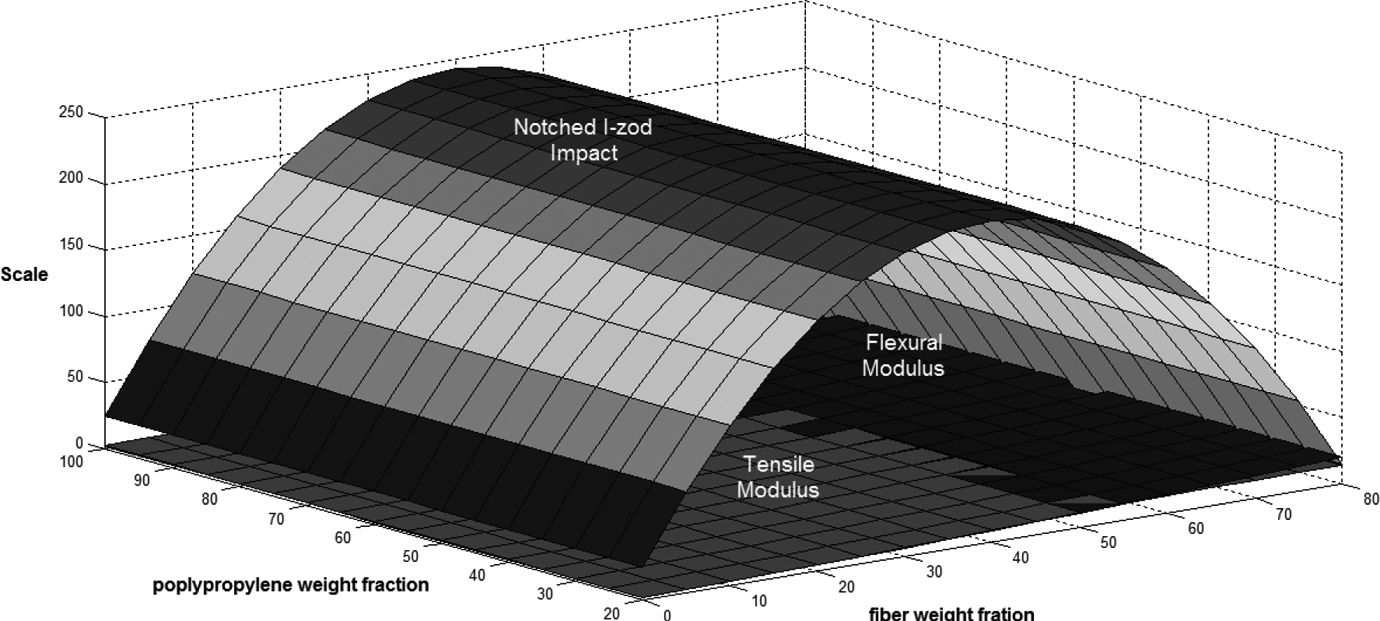
Surface plot of notched Izod impact, tensile modulus, and flexural modulus models for LGFPP. LGFPP: long glass fiber-reinforced polypropylene composites.
As a result, a combination at high values for all the three properties cannot be achieved because if a high level in the Izod impact is obtained, for instance, then the other properties cannot be obtained at higher levels, which means that the constraints (the requirements) are violated and vice versa. In other words, there is no feasible solution. This reason is also valid for the two previously discussed cases.
Figure 5 shows how the weight fraction of composite components were distributed as a function of tensile modulus for various amounts of Izod impact, while the flexural modulus was held constant at 4 GPa. It is clearly evident in Figure 5(a) that the fiber component weight was distributed in exactly the same way as the cost was distributed at same conditions. Also, the weight fraction for polypropylene system was plotted under same conditions; however, the properties increase by decreasing the weight of polypropylene, as illustrated in Figure 5(b). Similarly, the same trend and results were observed for different conditions. Hence, we can conclude that the cost increases with the increase in the properties of the composite; furthermore, increasing the weight of the fiberglass also increases the same property’s values, which indicates that the main factor affecting the cost is the weight of fiberglass.
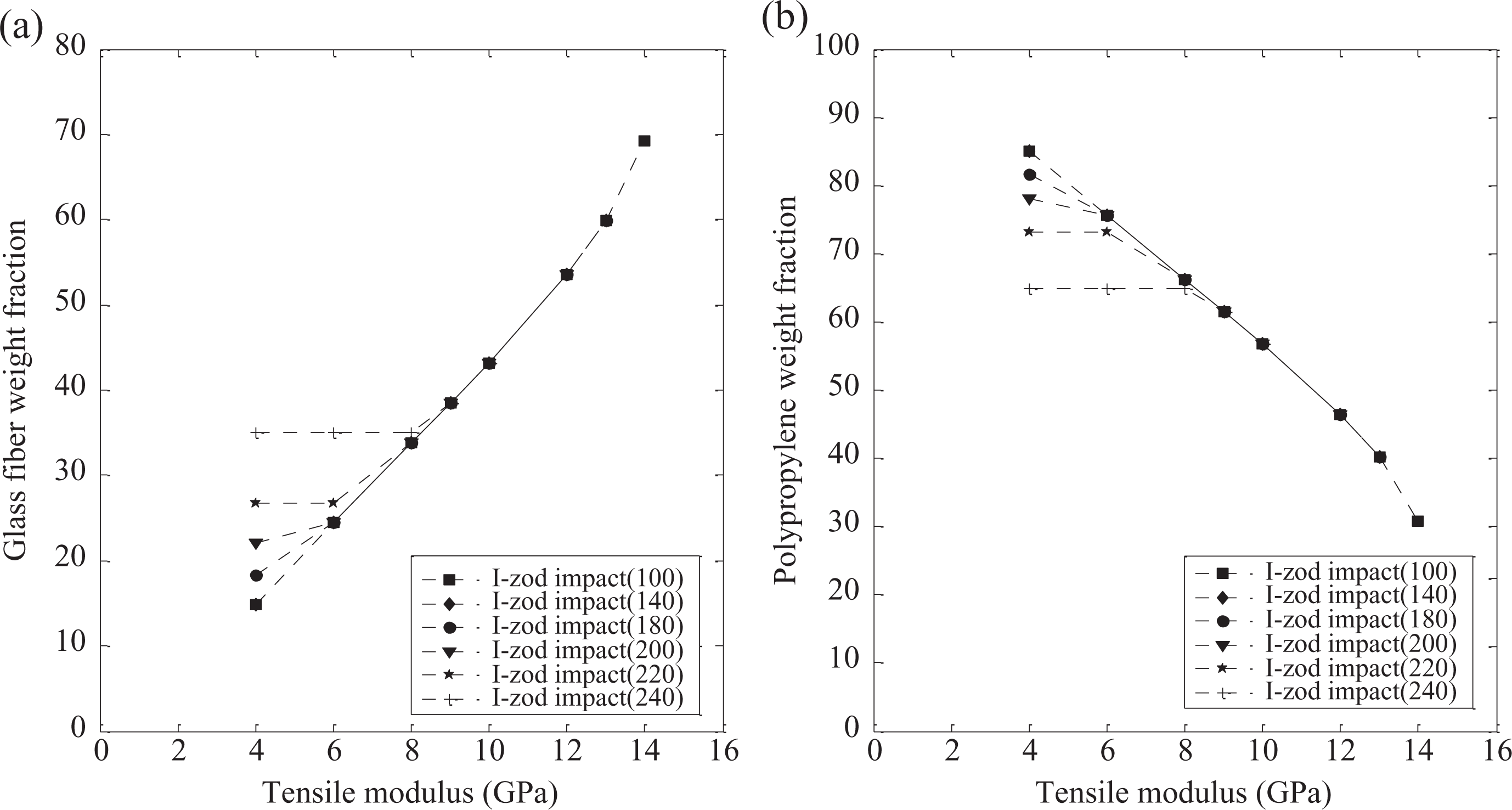
(a) Weight fraction of fiber glass versus tensile modulus for different values of Izod impact (b) weight fraction of polypropylene versus tensile modulus for different values of Izod impact.
Minimizing the variance of desired properties of LGFPP
The objective function was called in MATLAB software to minimize the variance between the desired properties to obtain the best proportion of weight fractions that would satisfy the constraints (the minimization of cost was secondary). The same conditions that were used in minimizing the cost were applied in minimizing the variance in order to compare the results of the two functions. In general, the results of the composite cost of the variance function show a similarity with the results of the cost function in some cases; however, there was a difference in other cases. These similarities and differences can be demonstrated by comparing the results of each combination of the two functions individually. Simulations were performed to minimize the variance of the desired properties as a function of tensile modulus at different levels of flexural modulus, and the Izod impact is kept constant.
In Figure 6, the cost is plotted against the tensile modulus for the two functions; the dashed line represents the cost of minimizing the variance function, while the solid line shows the cost minimization function. It can be seen that there is an identical cost of the composite for both functions at lower levels of tensile modulus; however, a slight difference in the composite cost is present between the two functions only when the tensile modulus is 12 GPa as shown in Figure 6(a). This difference in the cost becomes significant with an increase in the flexural modulus, where the cost from minimizing the variance function is greater than the cost from minimizing the cost function, as illustrated in the graphs (b) to (d) in Figure 6. At a high value of flexural modulus, such as 18 GPa, there is no feasible solution for both functions. Further analysis was conducted to show the effect of various levels of the Izod impact (constant) on the cost. It has been observed that the corresponding effect of increasing Izod impact leads to a reduction in the cost and the profiles are identical with those of minimizing the cost function. Also, a high value of Izod impact such as 240 J/m is unachievable.
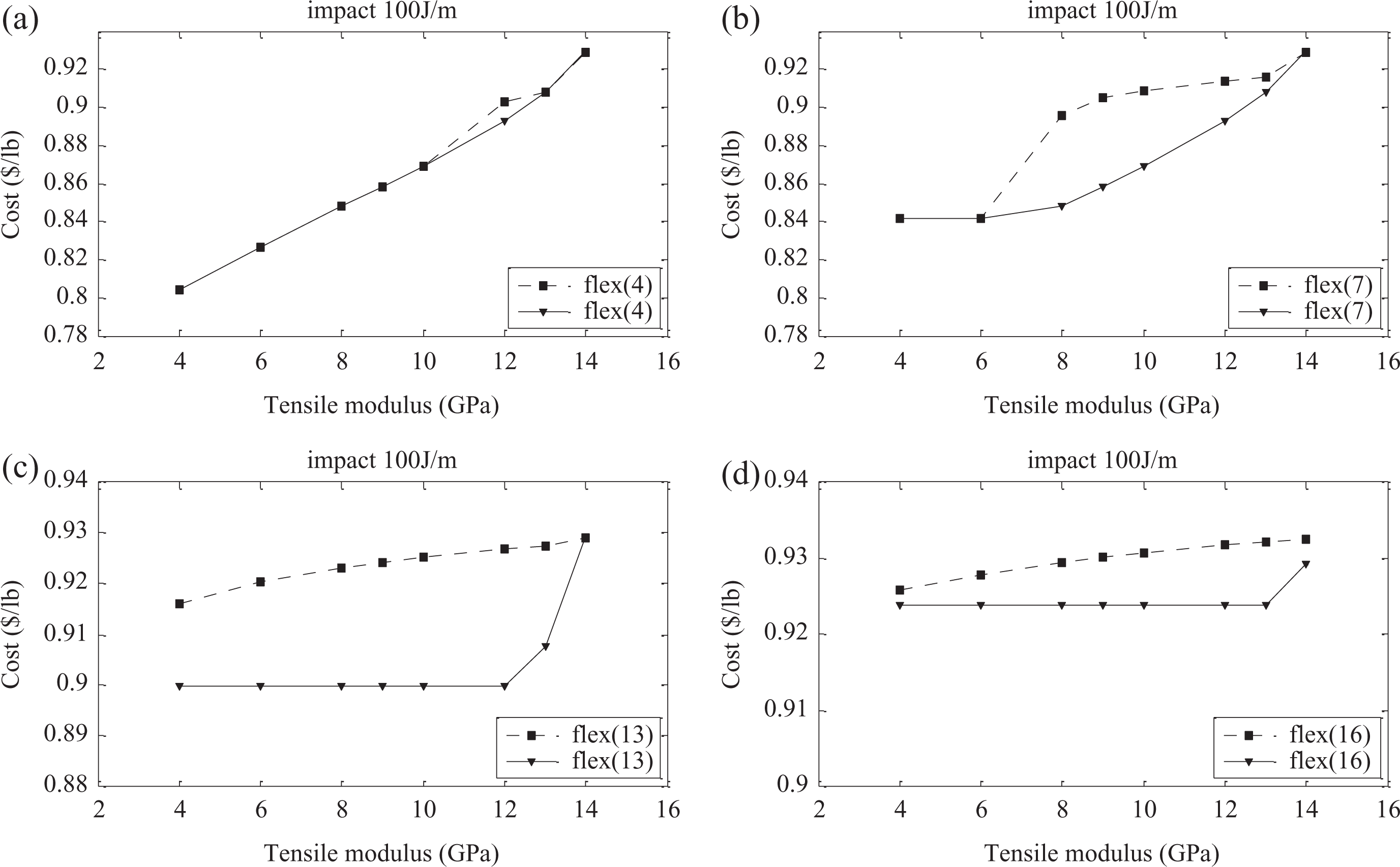
Comparison of the cost of variance and cost function versus the tensile modulus at constant value of Izod impact 100 J/m. (a) Flexural modulus 4 GPa, (b) flexural modulus 7 GPa, (c) flexural modulus 13 GPa, and (d) flexural modulus 16 GPa.
With constant flexural modulus and the other two properties as variables, it was observed that the cost of the composite from minimizing the variance function was slightly higher than the cost of minimizing the cost function at one combination only when the Izod impact equals 100 J/m and tensile modulus equals 12 GPa. Other than that the costs of other combinations were identical for both functions at low levels of flexural modulus. Increasing flexural modulus value leads to increase in the cost difference between the two functions toward the variance function as shown in Figure 7 where the cost was plotted against tensile modulus for various levels of Izod impact. Further, it can be seen that the cost of variance function at lower levels of Izod impact is much higher than the cost of minimizing cost function; however, the difference gradually decreases with increase in the Izod impact value.
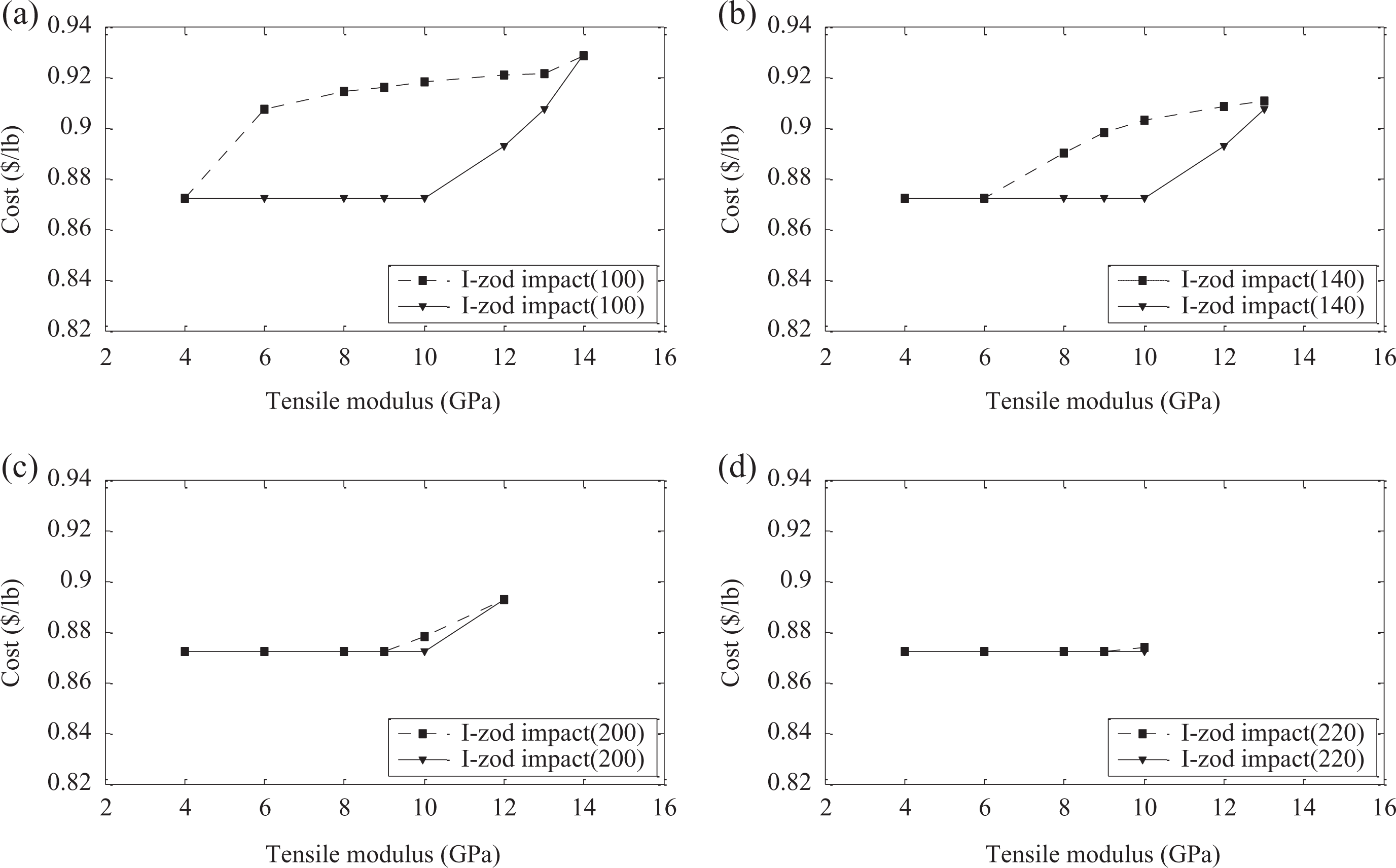
Comparison of the cost of variance and cost function versus the tensile modulus at constant value of flexural modulus 10 GPa. (a) Izod impact 100 J/m, (b) Izod impact 140 J/m, (c) Izod impact 200 J/m, (d) Izod impact 200 J/m. In another case study, the tensile modulus is kept constant, while the Izod impact and flexural modulus are varied. It has been observed that the cost obtained from the variance function remains identical with that obtained from cost function at low values of tensile modulus as a constant, such as 4 GPa. The exception is when the Izod impact is 100 J/m and the flexural modulus is 13 GPa, then, the cost of the variance function is slightly higher than the cost of the cost function.
In another case study, the tensile modulus is kept constant, while the Izod impact and flexural modulus are varied. It has been observed that the cost obtained from the variance function remains identical with that obtained from cost function at low values of tensile modulus as a constant, such as 4 GPa. The exception is when the Izod impact is 100 J/m and the flexural modulus is 13 GPa, then, the cost of the variance function is slightly higher than the cost of the cost function.
Increasing the tensile modulus leads to an increase in the cost for the variance function, causing it to be higher than the cost of minimizing the cost function, where the difference between those becomes significant with lower values of Izod impact, thereby increasing the value of flexural modulus as seen in Figure 7(a) to (c), while in Figure 7(d) the cost remains identical for both functions. The difference in the cost between the two functions at very high values of tensile modulus, such as 13 and 14 GPa decreased especially for high level of Izod impact as well as the number of combinations. Also, the difference is significant at high values of flexural modulus, while at lower values they are identical with the cost function (as shown in Figures 8 (a) through (d)).
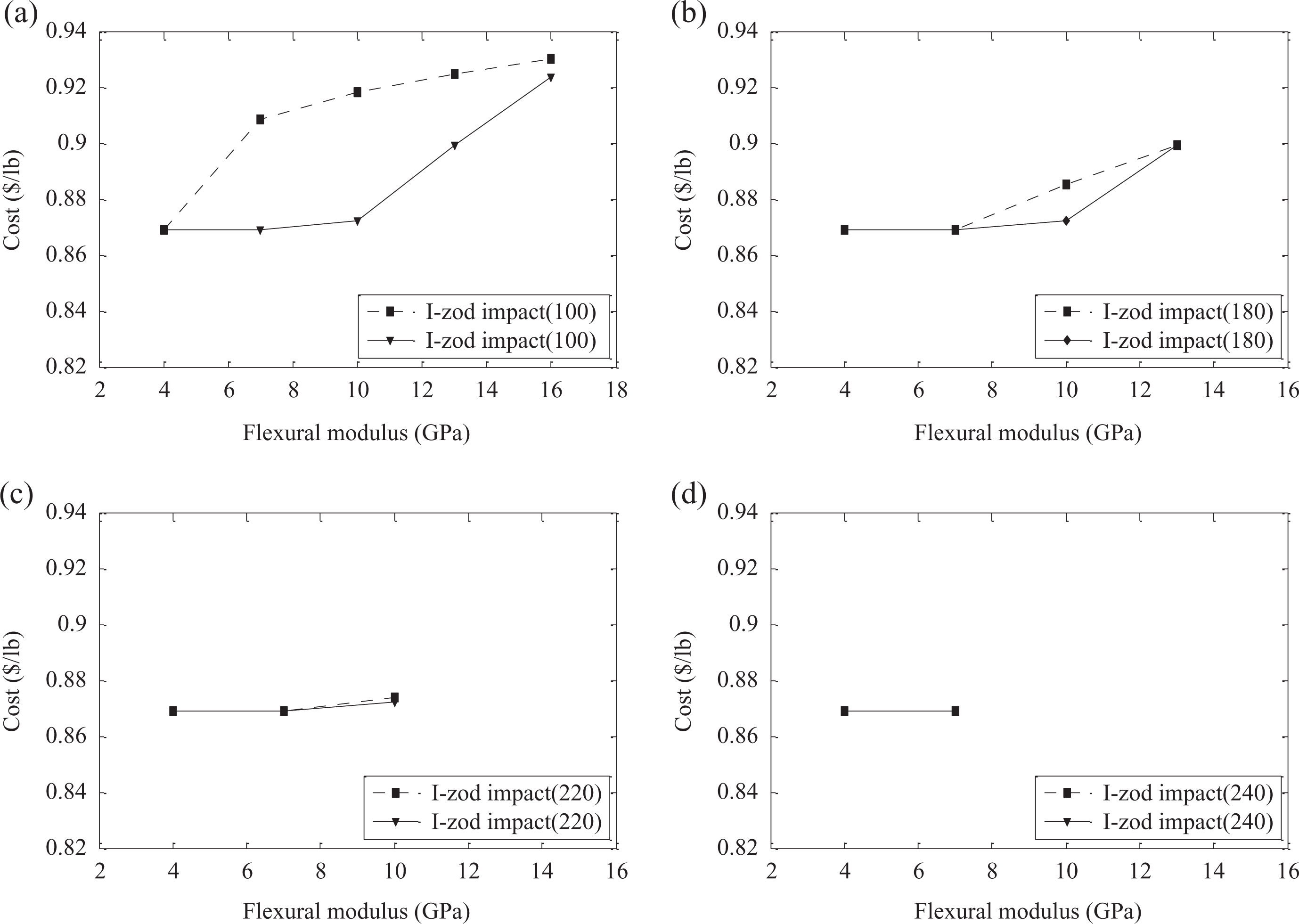
Comparison of the variance and cost function versus the flexural modulus at constant value of tensile modulus 10 GPa. (a) Izod impact 100 J/m, (b) Izod impact 180 J/m, (c) Izod impact 220 J/m, and (d) Izod impact 240 J/m.
From the results obtained by minimizing the variance function, it can be concluded that increasing both tensile modulus and flexural modulus causes an increase in the cost. At the same time, the difference in the cost increases for the variance function and the cost function; however, the Izod impact reduces the disparity in cost between the two functions when it is increased and the cost of the composite becomes constant in both the cost and the variance functions. Moreover, combining high values of the three properties is unachievable (or infeasible).
Conclusion
Designing products with desired properties using inverse modeling is very advantageous in terms of saving time in comparison with conducting experiments, which is very time-consuming. Furthermore, it can be used directly to build a controller where the input variables are included in the model. These input variables can be treated as desired properties, and the output variable is the action of it. Therefore, when a new requirement is requested, the controller can ask the model to predict the action needed.
Nonlinear regression models were used to predict mechanical properties of the LGFPP composite. The properties that were investigated include the tensile modulus, flexural modulus, and notched Izod impact.
Simulations were performed for different objective functions. According to the result of minimizing the cost of LGFPP, there was a positive relationship between the composite cost and the weight of glass fiber. In addition, a trade-off principle was applied in terms of characterizing the mechanical properties.
The variance between the desired properties was minimized to form the best composition of the composite, while the cost was secondary. There was a difference in the cost when the two functions of the LGFPP composite were compared, that is, the variance function has given a higher cost because the tensile modulus and flexural modulus were the mean factors that resulted in increasing the cost, while the effect of increasing the level of notched Izod impact was in the opposite direction, which resulted in lowering the cost.
Furthermore, these simulations will be useful in designing a product where the quality is most significant (irrespective of the composite cost).
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.