
Abstract
We study the effects of robotization on unemployment risk for different types of workers. We examine the extent to which robotization increases inequality at the skill level and at the occupational level using two theoretical frameworks: skill-biased technological change and task-biased technological change. Empirically, we combine worker-level data with information on actual investments in industrial robots. Zooming in on the German manufacturing industry, our multivariate results show that robotization affects different types of workers differently. We do not observe an increase in unemployment risk for low- and medium-skilled, but we find a considerably lower unemployment risk among high-skilled workers. Moreover, the unemployment risk is significantly higher in occupations with highly substitutable tasks, but only in industries that invest largely in robots.
Keywords
Technological change is a contributor to rising social inequality in the labor market (Kristal, 2013, 2020). Particularly, increasing investments in automation technologies in recent years have raised concerns that the use of industrial robots will dramatically change the future world of work (Degryse, 2016; Heald et al., 2020; Ilsoe, 2017). Above all, the major concern is that robots replace human jobs. Frey and Osborne (2017), for example, suggest that nearly half of all jobs in the US might be at risk of being replaced in the next decades. Other studies come to a less dramatic conclusion but still show employment losses in robot-related industries (Acemoglu & Restrepo, 2020). In Germany, one of the countries that invests most heavily in robots worldwide (IFR Statistical Department, 2017), robots have contributed to almost 23 percent of the overall decline in employment in the manufacturing industry between 1994 and 2014 (Dauth et al., 2017). Notably, robotization does not necessarily result in a net loss of jobs, as employment gains in other industries offset the displacement effects in manufacturing (Dauth et al., 2021; Klenert et al., 2020). The effects of automation and robotization on the workforce have been widely studied from a macroeconomic perspective (Autor et al., 2008; Bessen, 2016; Chen & Frey, 2021; Graetz & Michaels, 2018; Jung & Lim, 2020). However, economic studies have rarely addressed whether robots increase individual unemployment risks and whether robots have a redistributive impact on different types of workers.
In this article, we study the effects of robotization on individual unemployment risk with worker-level data. Given that robots replace job tasks, exposure to robots increases the unemployment risk for workers. Nevertheless, we expect the unemployment risk for some types of workers to be greater than that for others, either because their jobs are substitutable or because the transformation in work is too demanding for them (Autor, 2015). Therefore, we analyze, first, the actual risk of becoming unemployed due to automation and robotization, and second, the extent to which automation and robotization increases inequality between different types of workers.
To answer our research question of who is replaced by robots, we use two theoretical frameworks, skill-biased technological change (SBTC) and task-biased technological change (TBTC), each of which provides different predictions at which level automation increases inequality between workers. SBTC predicts increasing inequality between workers with different skill levels (“skill inequality”). SBTC implies that new technology is associated with a rising demand for skills and knowledge with comparative advantages for high-skilled workers compared to low- and medium-skilled workers (Acemoglu, 2002; Liu & Grusky, 2013). Negative impacts of robotization, such as unemployment, should therefore be concentrated on lower-skilled workers. In contrast, TBTC predicts increasing inequality between occupations (“occupational inequality”). TBTC suggests that occupational characteristics such as task composition, rather than individuals’ skill levels, determine a worker's individual exposure to robotization (Acemoglu & Autor, 2011). Consequently, particularly workers in occupations with a high share of potentially substitutable tasks should be at risk of becoming unemployed.
Specifically, we consider the skill level and the occupational level and focus on two different at-risk groups: low- and medium-skilled workers and workers who work in occupations with mainly substitutable tasks. Recent work on automation and robotization predominantly uses TBTC to explain technology-induced inequality in the labor market (e.g. Arntz et al., 2016; Parolin, 2021). Regarding unemployment, however, education and skills also determine workers’ unemployment risk (Abrassart, 2013; OECD, 2020). In a next step, we analyze the extent to which skill inequality occurs within occupations. Combining both theoretical frameworks will give us a clear picture of how automation and robotization affect the unemployment risk of different types of workers.
We focus on the German labor market and zoom in on the manufacturing industry. With this design, we analyze the impact of robot investments on the probability of becoming unemployed for workers in similar jobs in a very comparable labor market segment. Moreover, focusing on the manufacturing industry has the advantage of using actual investments in industrial robots provided by the International Federation of Robotics (IFR). Over the past two decades, the total number of industrial robots in Germany has almost tripled (IFR Statistical Department, 2017). Investments in industrial robots capture automation directly, in particular as compared to the use of information and communication technology (ICT) as a proxy for technological change, as in previous studies (King et al., 2017; Kristal, 2013). ICT has the flaw that it does not necessarily replace workers but rather complement specific tasks at work (Autor, 2015). Reprogrammable robots are instead decisive in replacing workers because robots are “fully autonomous machines that do not need a human operator” (Acemoglu & Restrepo, 2020, p. 2189).
To analyze the impact of automation and robotization on the unemployment risk for different types of workers, we consider actual investments in robots. With this design, we go beyond predictions that estimate unemployment potentials based on the share of potentially substitutable tasks in an occupation (e.g. Arntz et al., 2016; Frey & Osborne, 2017). We argue that being in an at-risk group (low- and medium-skilled workers/workers in occupations with a high share of potentially substitutable tasks) is not sufficient for actually becoming unemployed. The fact that a job can be replaced by a robot does not automatically mean that it will be replaced. To bear the negative consequences of robotization, it is also necessary that the employer invest in robots. Because investments in robots are cost intensive and not all employers invest in robots, we can use variation in robot investments. We interpret work in an industry with high levels of investment as a treatment that influences whether a worker who belongs to an at-risk group is actually at risk. In this way, we analyze the direct unemployment risk within at-risk groups, depending on whether they work in an industry with high or low levels of investment in robots.
Moreover, we apply a group-comparison design that allows us to analyze the relative unemployment risk between at-risk groups and groups that are not at risk. With this group-level comparison, we consider the fact that automation can have positive employment effects on some types of workers. Robots often complement or augment jobs rather than replace them (Autor, 2015; Bessen, 2019). Consequently, the impact of robotization may be redistributive rather than disruptive. The analyses of relative unemployment risk therefore provide us with information about the extent to which robots contribute to social inequality by increasing the gap in the unemployment risk between different types of workers.
Robotization and Unemployment Risk
Technological change, such as the implementation of industrial robots, often comes along with rising uncertainty and increasing labor market risks for workers (Boyd & Holton, 2017). These risks are usually unequally distributed between social groups (Kristal & Cohen, 2017). Accordingly, we can expect investments in robots to have different effects for different types of workers. In our analysis, we focus on two types of workers that we expect to be particularly exposed to robotization: low- and medium-skilled workers and workers in occupations with a high share of substitutable tasks. We test whether robotization increases the unemployment risk of workers at two different levels, at the skill level and at the occupational level.
Skill Inequality
A large body of research has demonstrated the importance of educational attainments and skills for workers’ risk of becoming unemployed (e.g. Abrassart, 2013; Gebel & Giesecke, 2011; OECD, 2020). Technological change hits especially low-skilled workers (Hötte et al., 2021). In contrast, high-skilled workers generally have a lower risk of becoming unemployed than workers with lower skill levels (Lodovici & Semenza, 2012). Moreover, new technologies increase the demand for skills and knowledge in the workplace (Acemoglu, 2002; Katz & Murphy, 1992). Therefore, we assume that the risks associated with robotization differ by skill group, with lower-skilled workers bearing the greatest risks, while high-skilled workers may actually benefit from robots. Consequently, robot investments should increase skill inequality in terms of unemployment risk.
A key argument for skill inequality in the context of robotization is that workers have varying degrees of transferable skills. Transferable skills “can be applied to any job or task, regardless of where they were first acquired” (European Commission, 2011, p. 26). Because transferable skills are not tied to one specific job, they allow workers to adapt quickly to changes in the labor market (Gekara & Snell, 2018). Transferable skills play an important role in strengthening workers` employability (Muhamad, 2012), especially in the context of technological change. Transferable skills are often acquired during academic training and higher education (Nägele & Stalder, 2017), while vocational education focuses mainly on occupation-specific skills that prepare graduates to work in a specific occupation (Baethge & Wolter, 2015). As a result, high-skilled workers have higher levels of transferable skills and are thus better equipped to respond to the robotization of work than lower-skilled workers.
In addition to the role of transferable skills, the concept of SBTC states that the introduction of new technologies generally increases the demand for skills in the labor market (Acemoglu, 2002; Katz & Murphy, 1992). Because high-skilled workers have higher human capital, new technologies increase their productivity relative to lower-skilled workers (Goldin & Katz, 2008; Tinbergen, 1974). Economists often argue that these relative productivity gains among high-skilled workers increase the skill wage gap (Acemoglu, 2002). In addition to wages, the SBTC may also have implications for workers’ unemployment risk. First the rising demand for skills is likely to reduce unemployment among high-skilled workers and widen the relative gap between them and low- and medium-skilled workers. Second, the widening skill wage gap leads lower-skilled workers to demand higher wages. Since these wages are not justified by productivity gains, the risk of unemployment increases for these workers (Weiss & Garloff, 2011). Oesch (2011), for example, found a decreasing demand for low-skilled industrial workers due to technological changes.
Therefore, we expect robot investments to increase the unemployment risk at the skill level. From these theoretical considerations, we derive our skill inequality hypothesis:
H1: The difference in unemployment risk between low- and high-skilled workers and between medium- and high-skilled workers is greater in industries with high levels of robot investment than in industries with low levels of robot investment.
Occupational Inequality
The concept of SBTC is often criticized for focusing on skills and human capital as the single critical mechanism, neglecting institutional factors (Dwyer, 2013; Kristal & Cohen, 2017). Workers’ exposure to technological change also depends on their embeddedness in the occupational setting (Kristal, 2020; Mouw & Kalleberg, 2010; Williams, 2017; Williams & Bol, 2018). Occupations may change over time or disappear entirely. Following this line of reasoning, investments in robots should increase the unemployment risk of workers in occupations with specific characteristics, which are not necessarily workers with lower skills. Therefore, we expect investments in robots to raise inequality at the occupational level as well.
According to the concept of TBTC, human capital is task specific, and each occupation has a different task composition (Acemoglu & Autor, 2011). In general, occupations can be viewed as a bundle of different tasks in the workplace. This definition of occupations puts the task composition in the foreground and makes it possible to describe similarities and differences between different occupational groups (Fernández-Macías & Bisello, 2022). For analytical purposes, the different occupational tasks are often grouped into five main tasks (analytical, interactive and manual non-routine tasks and cognitive and manual routine tasks [MRTs]) (Spitz-Oener, 2006). Non-routine tasks are more complex and difficult to automate, whereas routine tasks can be divided into single algorithms that computers or robots can perform (Autor et al., 2003). Cognitive and MRTs are potentially susceptible to technical substitution (Spitz-Oener, 2006). Consequently, occupations with a high proportion of routine tasks should be at a higher risk of being replaced by robots (Arntz et al., 2016; Bonin et al., 2015). This does not necessarily imply that these occupations will disappear (Dengler & Matthes, 2015), but technical substitution could change their task composition. Consequently, the skills acquired during training by workers in highly substitutable occupations become insufficient to meet current occupational requirements (Hanushek et al., 2017). Not every worker has the same chance to react to these changes in job requirements because individual access to further training is often restricted (Offerhaus et al., 2016). Thus, robot investments should increase the risk of unemployment for workers with a high share of routine tasks and—with regard to manufacturing—MRTs in particular.
Therefore, we expect robot investments to increase the unemployment risk at the occupational level, in particular between occupations with a high share of substitutable tasks and all other occupations. From these theoretical considerations, we derive our occupational inequality hypothesis:
H2: The difference in unemployment risk between workers in occupations mainly composed of substitutable manual routine tasks and workers in other occupations is greater in industries with high levels of robot investment than in industries with low levels of robot investment.
Data and Empirical Strategy
Data and Sample
Our analysis focuses on workers in Germany's manufacturing industry because industrial robots are relatively irrelevant in non-manufacturing industries. 1 To test our hypotheses, we combine data from individual employment biographies that contain information on transitions into unemployment with industry-level data that informs us about investments in robots. The worker-level data also provide information on workers’ skill levels and the occupation in which they work. Based on the occupational classification, we add information on the task structure of each occupation. With this information, we generate different skill groups and task groups, which allow us to discriminate between skill inequality and occupational inequality. Moreover, we use information about yearly investments in industrial robots. In the following, we first describe the different data in more detail, and then describe our analytical sample.
To obtain information on individual employment biographies, we use the Sample of Integrated Labour Market Biographies (SIAB). The SIAB is a rich dataset provided by the German Institute for Employment Research, which consists of administrative data on approximately 2 percent of the German workforce liable to the social security system (Antoni et al., 2016). From these data, we selected all workers aged 18 to 65 who were employed in the manufacturing industry on January 1st, 2012, and at least 1 month thereafter. Then, we use the longitudinal structure of our data set to observe whether these workers become unemployed within the 3-year period 2012 to 2014, which is the dependent variable. For all other variables (robot investments, socio-demographics, etc.) we use information from the year 2012. Thus, we have a representative data set with one observation per person that allows us to analyze whether a worker who was employed in an establishment with large robot investments in 2012 has had a higher unemployment risk in the subsequent 3-year period. We focus on the probability of becoming unemployed within a period of 3 years to cover both the direct and lagged effects of robot investments. We use 2012 as the starting point for our analysis because it is the first year for which we have accurate data about the task structure within occupations (Dengler et al., 2014). 2 Our sample consists of 115,467 workers. Moreover, the SIAB contains information on workers’ skill levels and the occupation (3-digit code, KldB 2010) and industry (3-digit industry code, WZ 1993) in which they work.
For each occupation, we add information on its task structure. The occupational task data rely on an expert classification of the task composition of almost all occupations in Germany based on the database BERUFENET, including the share of manual and cognitive routine tasks as well as that of analytic, cognitive, and manual non-routine tasks (Dengler et al., 2014). Some authors have pointed out that task shares based on survey data capture job heterogeneity more accurately than data based on expert judgment (e.g. Fernández-Macías et al., 2016; Storm, 2022). Nevertheless, Storm (2022) shows that using BERUFENET expert data compared to survey based task data results in a very similar average share of routine (cognitive and manual) tasks within occupations (38 percent versus 40 percent).
We measure robot investments by the annual number of newly installed robot units in an industry using data from the World Robotics Survey (WRS). The WRS is conducted by the IFR and contains reports on nearly all robot suppliers worldwide regarding their yearly sales of industrial robot units. 3 Before we merged the WRS data with the SIAB data, we computed the share of annual robot investments per 10,000 employees by weighting the WRS data with the employment share per industry. Otherwise, we would overestimate the impact of robots in large industries. For this purpose, we used employment data from the German Statistical Office for the same year in which we measure robot investments (Destatis, 2018). Moreover, we harmonized the industry classifications between the WRS and the SIAB. Altogether, we have information about robot investments in 53 manufacturing subindustries, some of them at the 2-digit level and some at the 3-digit level (see Table S1 in the supplementary material). 4
Exposure to Robot Installations: Definition of a Risk Threshold
As described above, information on robot installations is only available at the industry level and not at the establishment level. Because we have no information on whether an establishment actually invests in robots, we cannot directly identify whether workers experience robotization at their workplace. As a solution, we approximate the risk of being exposed to robot installations by defining a critical threshold at the industry level above which robotization at the establishment level is particularly likely.
We define at-risk industries as subindustries of the manufacturing industry with a relatively high share of investments in industrial robots compared to the manufacturing industry as a whole. Workers who are employed in an establishment in these at-risk industries should face a significantly higher chance that new robots are being installed. Working in an at-risk industry thus approximates the risk of experiencing robot installations at the establishment level.
To identify subindustries of the manufacturing industry with particularly high numbers of robot installations, we calculated the relative position of each subindustry in the yearly distribution of robot installations. Then, we classified the top-20-percent of subindustries with the highest annual robot investments per 10,000 workers as at-risk industries. The top-20-percent of subindustries with the highest robot investments were responsible for approximately 83 percent of all robot investments in the manufacturing industry in 2012 (see Figure S1 in the supplementary material). This indicates a wide range of investment levels even within the manufacturing industry and that robot investments are considerably higher among the top-20-percent subindustries. Accordingly, the probability of being exposed to robot installations should be significantly lower for workers employed in a subindustry in the lower percentiles than for workers in a top-20-percent subindustry.
From all 53 manufacturing subindustries, we identified 11 subindustries as “at-risk industries”, which are industries with relatively large robot investments. The subindustries in the at-risk industries group with the highest employment shares belong to the automotive industry, followed by manufacturing of plastic products, manufacturing of furniture and manufacturing of pulp and paper products. In total, 27,328 of the 115,467 workers in our sample are employed in at-risk industries (23.7 percent) (see Table S1 in the supplementary material).
A central prerequisite for the empirical analysis is that the at-risk industries and the industries with relatively small robot investment do not differ systematically in their other characteristics. In fact, the 11 at-risk subindustries are largely comparable to the other industries concerning transitions into unemployment, their share of low- and medium-skilled workers and their share of workers with mainly MRTs (see Table S1 in the supplementary material). A second prerequisite for the empirical analysis is that business conditions in at-risk industries do not differ significantly from business conditions in industries with small robot investment. The adoption of new technologies is often a response to changing business and other labor market conditions. Changing conditions may also affect workers` unemployment risk. Therefore, we consider changes in revenue, changes in total investment, and changes in employment in industries with small and large robot investments between 2012 and 2014. Overall, business and labor market conditions have developed relatively similarly in both industries. Not surprisingly, however, the changes in total investments are higher in industries with large robot investments (see Table S2 in the supplementary material).
Further, to test sensitivity of our classification of at-risk industries, Table S3 compares the pattern of robot investments from 2012 with the patterns from 2004 onwards. The patterns of robot investment are very similar across the years and, thus, relatively stable over time. In 2010, for example, we classified 10 out of the same 11 subindustries as at-risk industries. From this comparison, we can conclude that the at-risk industries in 2012 are not latecomers and that robots did not already replace jobs in the subindustries with relatively small robot investments in 2012 in the past.
Definition of at-Risk Groups
According to our theoretical discussion, not all workers who are employed in manufacturing subindustries with large investments in robots should have the same risk of becoming unemployed. Rather, whether a worker is at risk of becoming unemployed should depend on the skill level or on the task composition of that worker's occupation. Similar to the industry level, we define two at-risk groups at the individual level to analyze the extent to which robots replace workers: at-risk skill groups (0/1) and at-risk occupations (0/1).
To test the skill inequality hypothesis, we create three skill groups according to worker skill levels: low-skilled, medium-skilled and high-skilled. 5 To test the occupational inequality hypothesis, we define at-risk occupations by the share of MRTs in an occupation. We focus on MRTs because according to the definition of Spitz-Oener (2006), programmable industrial robots should mainly replace typical manual tasks such as “operating or controlling machines” or “equipping machines”. We classify all occupations in which MRTs make up the highest share of all tasks as at-risk occupations. Using this dichotomous specification, we classified 24 out of 144 occupations at the 3-digit level as at-risk occupations.
Table S4 in the supplementary material shows the 24 occupations that we have classified as at-risk occupations. If we compare these occupations with the at-risk industries (see Table S1 in the supplementary material), we find certain similarities that indicate an increased risk of robotization. For example, occupations in the plastic-, rubber- and papermaking industries have an extremely high share of MRTs. In contrast, some of the other occupations with predominantly MRTs, such as metal construction and welding, cannot be clearly assigned to a specific industry type. A metalworker, for example, could work either in an industry with relatively low robot investments (e.g. basic metals) or in an at-risk industry (e.g. automotive industries).
Estimation Strategy
We run individual maximum likelihood regressions 6 with cluster-robust standard errors for both hypotheses, that for skill inequality and that for occupational inequality. We use cluster-robust standard errors to consider that workers are clustered in establishments. The regression models predict the individual risk of entering unemployment by including a cross-level interaction between the two risk dimensions: working in an at-risk industry and simultaneously belonging to an at-risk skill group and working in an at-risk industry and simultaneously belonging to an at-risk occupation. In general, we expect higher unemployment risk only if workers are exposed to two risks simultaneously. If only one risk applies, we do not expect a higher probability of becoming unemployed.
In principle, the cross-level interactions results in six groups in the skill model and in four groups in the occupation model. In the skill model, we have the combinations among working and not working in an at-risk industry and the three skill groups, low, medium and high. In the occupation model, we have the combinations among working and not working in an at-risk industry and working and not working in an occupation with mainly MRTs. In both models, we focus on the direct and the relative unemployment risk. In the skill model, the direct unemployment risk is estimated from a comparison between low- and medium-skilled workers who work in a manufacturing subindustry with large robot investments and low- and medium-skilled workers who work in a manufacturing subindustry with small robot investments. The relative risk becomes apparent when comparing the direct unemployment risk for the low- and medium-skilled workers with that for the high-skilled workers. This resembles the logic of a difference-in-differences analysis. Analogously, we show the direct and relative unemployment risk in the occupation model.
To analyze the direct and the relative unemployment risk, we implement a group-comparison design and analyze the differences in the predicted probabilities of unemployment for each group, holding all other variables at their means. For each group comparison, we use the Wald test statistic to test whether the differences in the predicted probabilities are statistically significant. This analytical strategy prevents the interpretation of potentially biased logit coefficients and allows comparisons of differences across groups within nonlinear models (cf. Long & Mustillo, 2021).
In both the skill model and the occupation model, we include covariates at the individual, the establishment and the industry level using information from 2012. At the individual level, we consider sociodemographic characteristics (sex, age, nationality, and part-time employment) and three covariates from the employment biographies, which we expect to correlate with unemployment risk: work experience, length of service in the establishment and days in welfare receipt as indicators for past unemployment periods. At the establishment level, we include establishment size (1–19, 20–49, 50–99, 100–249, 250–499, 500–999, and 1000 and more workers), the mean wage in the establishment and the federal state in which the establishment is located. At the industry level, we use data from the German Federal Office of Statistics (2020) to control for changes in business conditions (revenue and total investments) between 2012 and 2014.
Empirical Results
The descriptive comparison shows that the share of workers who became unemployed is generally lower in subindustries with large robot investments than in subindustries with small robot investments (5.70 percent vs. 4.27 percent). This finding suggests a positive association between robot investments and labor demand, either because successful industries invest more in robots or because industries with large robot investments are economically more successful. In both cases, robot investments seem to entail employment benefits for workers in these industries. Nevertheless, we do not expect that these benefits apply to all types of workers. Rather, we assume the lower share of unemployment transitions disappears and may even reverse for the at-risk groups. In the next step, we present the results from the skill model followed by those from the occupation model.
Testing for Skill Inequality
The multivariate analysis starts with a comparison of the predicted probabilities for the skill model presented in Table 1. To find evidence for increased unemployment risk due to robot investments, we would expect low- and medium-skilled workers to have a significantly higher predicted probability of becoming unemployed if they work in industries with large investments in robots compared to workers with the same skill level who work in industries with small investments in robots. Moreover, we analyze the relative unemployment risk and test whether robots increase the unemployment risk between high-skilled workers and low- and medium-skilled workers.
Testing for Skill Inequality: A Comparison of the Unemployment Risk Between Skill Groups Across Industries. Predicted Probabilities of Entering Unemployment.
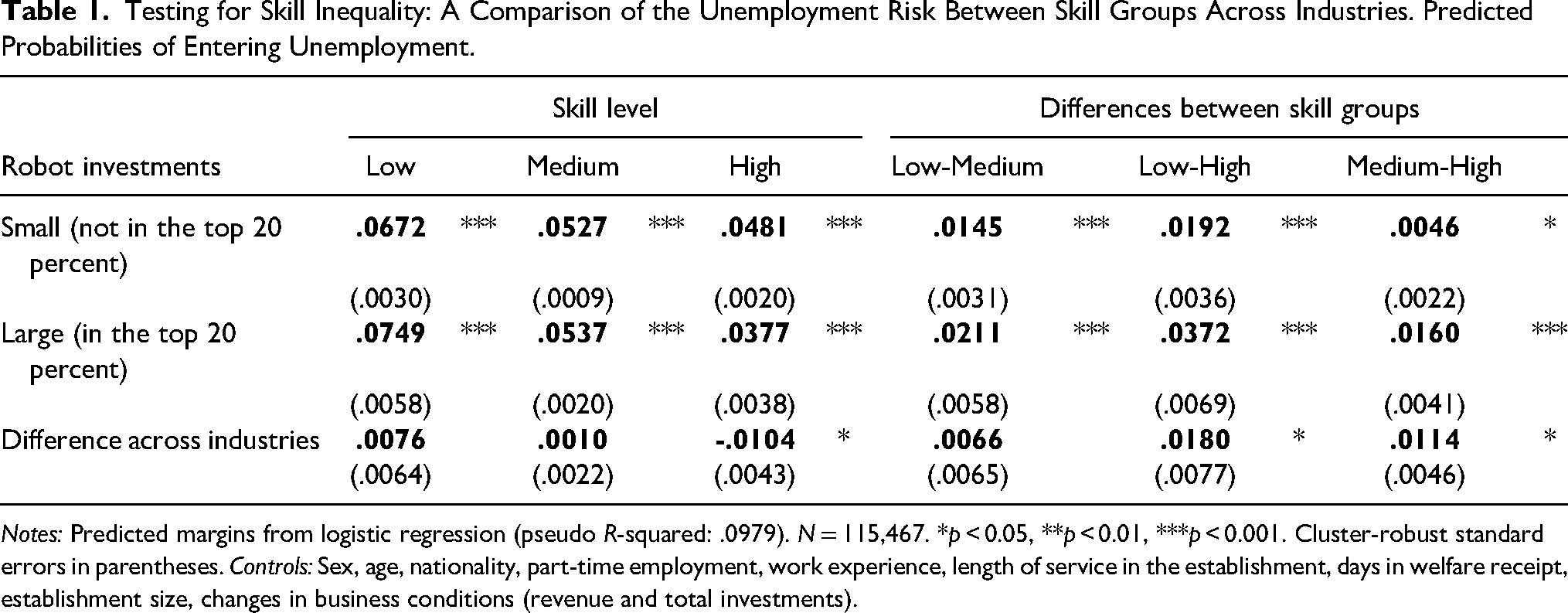
Notes: Predicted margins from logistic regression (pseudo R-squared: .0979). N = 115,467. *p < 0.05, **p < 0.01, ***p < 0.001. Cluster-robust standard errors in parentheses. Controls: Sex, age, nationality, part-time employment, work experience, length of service in the establishment, days in welfare receipt, establishment size, changes in business conditions (revenue and total investments).
In the left-hand panel, we compare the predicted margins for the probability of entering unemployment between industries with large and small robot investments within skill groups. Indeed, the predicted probability of becoming unemployed for low-skilled workers in at-risk industries (large investments) is slightly higher at 7.49 percent than for low-skilled workers in industries that are not at risk (small investments), which is 6.72 percent. The difference between the industries of approximately 0.76 percentage points is not statistically significant. Turning to medium-skilled workers, the unemployment risk does not significantly differ between workers in at-risk industries and those in industries that are not at risk (0.10 percentage points). For high-skilled workers, however, we find a considerably lower risk of becoming unemployed if they work in at-risk industries, and the difference is statistically significant (1.04 percentage points). High-skilled workers benefit if they work in industries with high levels of robot investment.
In the third column of the right-hand panel in Table 1, we show the relative unemployment risk. The results show that the difference in the unemployment risk between low-skilled and high-skilled workers, as well as the difference in the unemployment risk between medium-skilled and high-skilled workers, increases (1.80 and 1.14 percentage points). Both differences are statistically significant. Using the example of low- versus high-skilled workers, we can well illustrate the increased risk of unemployment. In industries with low investment, the difference is 1.92 percentage points, and at 3.72 percentage points, the unemployment risk is almost twice as high in at-risk industries. In contrast, the difference between low-skilled and medium-skilled workers is very small and not statistically significant. Unemployment risk for low- and medium-skilled workers does not increase when industries invest in robots, but high-skilled workers benefit from such investments in robots. To summarize, we accept hypothesis 1 and observe an increase in skill inequality due to robotization.
Testing for Occupational Inequality
We continue our multivariate analysis with a test for occupational inequality. The basic idea is that occupations and their inherent task structure determine the risk of being replaced by robots. In particular, workers in occupations where potentially substitutable MRTs are the main tasks (occupations at-risk) should have a higher unemployment risk if exposed to high levels of robot investment. A clear indicator of actual exposure to robots is if workers in these high-risk occupations in industries with high levels of robot investment have a higher risk of unemployment than comparable workers in industries with low levels of investment. Moreover, we analyze the relative unemployment risk and test whether robots increase inequality between occupations.
Analogous to that for the skill model, the analysis starts with a comparison of predicted unemployment risk within at-risk occupations between industries with relatively large and small robot investments. As the margins in the left-hand panel in Table 2 show, the difference in the probability of becoming unemployed in at-risk industries compared to that in industries with small investments is 0.70 percentage points. The difference is statistically significant. While workers in occupations with mainly MRTs have a predicted probability of entering unemployment between 2012 and 2014 of 5.62 percent in industries with relatively low levels of robot investment, the probability for the same group of workers in at-risk industries is 6.32 percent. This difference of 0.70 percentage points means that the risk of becoming unemployed is more than 12 percent higher for workers in at-risk occupations when they work in at-risk industries than for those in similar occupations in industries with low levels of robot investment. In contrast, for workers in other occupations, the risk of becoming unemployed decreases if they work in at-risk industries (0.52 percentage points, statistically significant).
Testing for Occupational Inequality: A Comparison of the Unemployment Risk Between Occupational Groups Across Industries. Predicted Probabilities of Entering Unemployment.
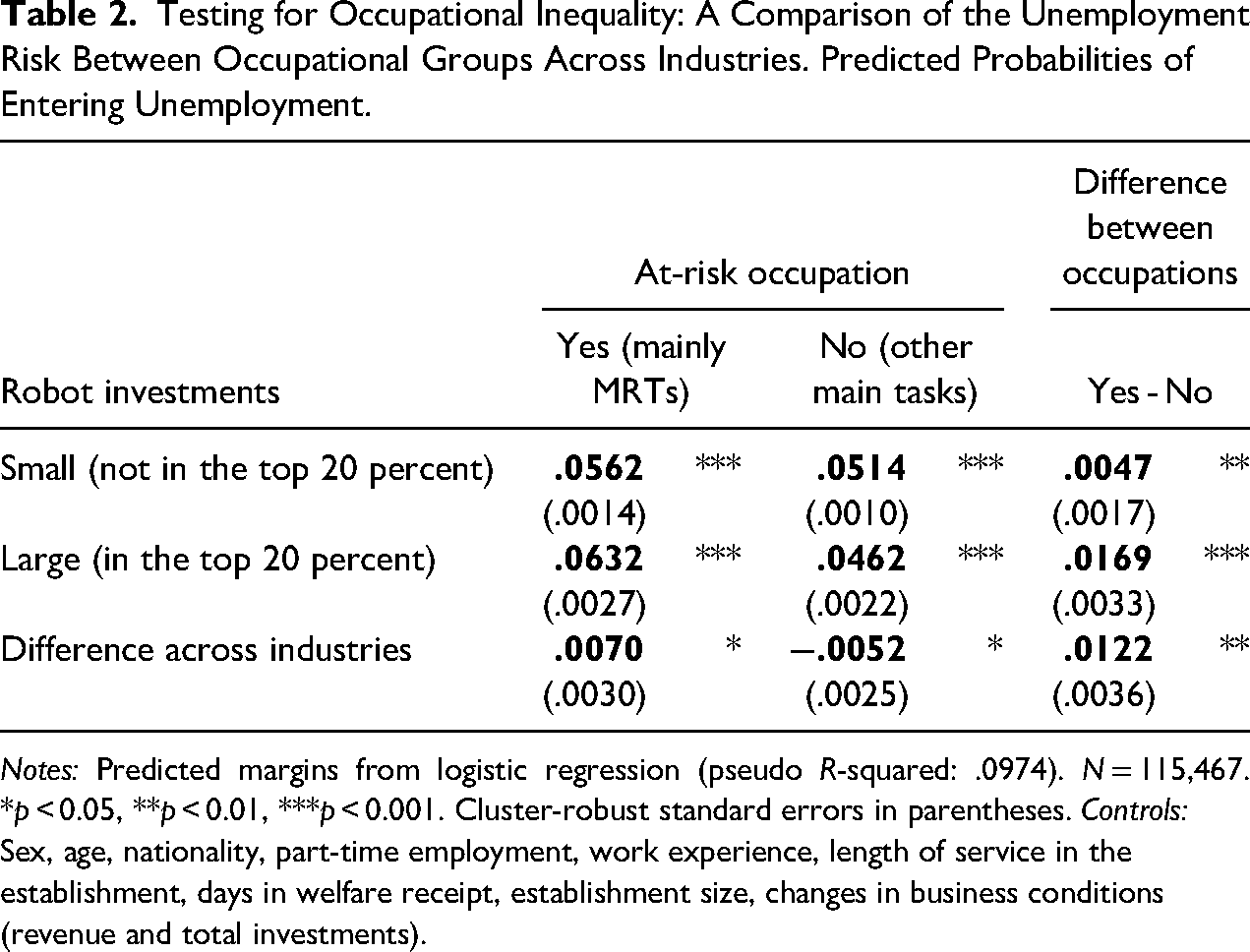
Notes: Predicted margins from logistic regression (pseudo R-squared: .0974). N = 115,467. *p < 0.05, **p < 0.01, ***p < 0.001. Cluster-robust standard errors in parentheses. Controls: Sex, age, nationality, part-time employment, work experience, length of service in the establishment, days in welfare receipt, establishment size, changes in business conditions (revenue and total investments).
Additionally, to test whether the relative unemployment risk between MRT occupations and the other occupations increases, we analyze the difference-in-differences, as shown by the predicted margin in the third column of the right-hand panel. The results show a clear pattern. The difference between occupational groups is 1.22 percentage points, which is relatively large and statistically significant. In industries with high levels of robot investment, the risk of unemployment is 1.69 percentage points higher for workers in at-risk occupations, whereas in industries with low levels of robot investment, the unemployment risk is only 0.47 percentage points higher. To summarize, we observe an increase in occupational inequality due to robotization and accept hypothesis 2.
Skill Inequality Within Occupations With Mainly MRTs
Next, we focus on occupations with mainly MRTs and distinguish within these occupations by the skill level of workers. This analysis shows the extent to which skill inequality exists in occupations affected by robotization. Empirically, we extend the occupation model and consider workers’ skill levels in occupations with mainly MRTs by estimating a threefold interaction between at-risk industry, occupation-at-risk, and skill level.
Figure 1 shows the difference in the unemployment risk for each skill group in occupations with mainly MRTs in industries with large robot investments compared to industries with small robot investments (direct unemployment risk). The results show that in occupations with mainly MRTs, only medium-skilled workers have a statistically significantly higher unemployment risk. The risk of low-skilled workers in at-risk occupations is only marginally higher in industries with large robot investments, while high-skilled workers in at-risk occupations even have a reduced risk of becoming unemployed. Both results are statistically not significant. To summarize, in occupations with mainly MRTs, the risk of unemployment increases due to robotization only for medium-skilled workers.
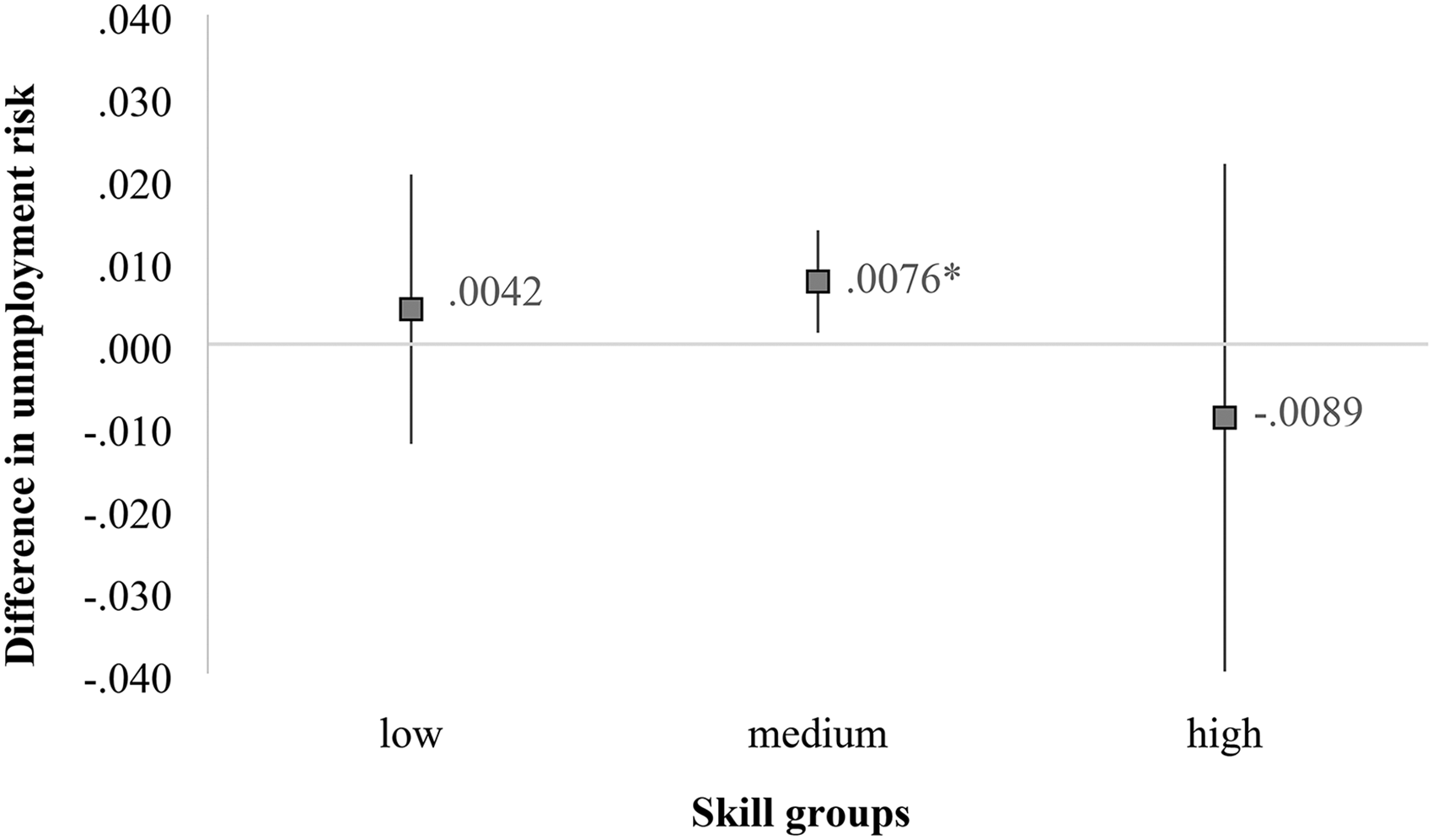
Occupational inequality by skill groups: difference in predicted unemployment risk within at-risk occupations between industries with large and small levels of robot investment.
Robustness Checks
We have performed several additional robustness checks to test the consistency of our results under alternative specifications, which we present in the following. Overall, the robustness checks show that our results are robust.
First, we vary the industry risk threshold, which was currently set at the 80th percentile of industries with the largest robot investments (Figure S2 in the supplementary material). Using different industry risk thresholds at the 50th, 60th, 70th, 80th and 90th percentile reveals that the relative unemployment risk is not statistically significant for thresholds up to the 70th percentile. Moreover, the relative unemployment risk increases with a higher threshold. This supports our assumption that the unemployment risk increases only if an industry largely invests in robots.
Second, to test the robustness of our occupation risk threshold, we estimated an alternative specification of the task model using the share of MRTs in an occupation. As Figure S3 in the supplementary material suggests, the gap in the predicted unemployment risk between workers in at-risk industries and in industries with small investments increases almost linearly with the share of MRTs in total tasks. Moreover the difference in unemployment risk between industries with small and large investment in robots is only statistically significant at a MRT share of 60 percent and more. This suggests that workers with MRTs as their main tasks are particularly exposed to robotization.
A third concern is that the difference in the predicted unemployment risk between industries results from the selection of less productive workers into industries with large robot investments. This would be the case if workers who are more productive anticipate a higher risk of robotization in these industries. In our empirical analysis, we address this concern by controlling for employment biography data, including past unemployment experience and the length of service in the establishment. Because most workers have been working in the same establishment for a long time, anticipatory behavior is largely negligible.
Fourth, scholars often argue that robot investments are less likely to lead to layoffs but that the decline in employment is more likely to be driven by other mechanisms, such as early retirement and a decline in recruiting. We do not deny these mechanisms. Nevertheless, if we exclude workers who leave the manufacturing industries for reasons other than unemployment (Tables S7 and S8 in the supplementary material), we still find the same patterns as those shown in Tables 1 and 2.
Finally, we excluded the robot-intensive automotive industry, which accounts for over 40 percent of all workers in at-risk industries (Tables S9 and S10). This restriction has little effect on the estimated effect sizes. However, the standard errors are larger due to the smaller sample size. In the skill model, the differences in unemployment risk are no longer statistically significant; in the occupation model, they remain statistically significant.
Discussion
This article has focused on the extent to which investments in industrial robots increase the risk of unemployment for different types of workers. To answer the question of who is replaced by robots, we use two different theoretical frameworks, SBTC and TBTC. Regarding unemployment, both frameworks consider different groups to be exposed to automation and robotization (at-risk groups): low- and medium-skilled workers and workers in occupations with mainly substitutable MRTs. Using worker-level data, we compared the direct and relative unemployment risk of these potentially exposed workers. Focusing on 53 manufacturing subindustries in Germany, we approximated the risk of being replaced by robots by introducing a threshold for at-risk industries with relatively large investments in industrial robots.
Our results show that robotization indeed increases skill inequality in terms of unemployment risk. Interestingly, in industries that invest largely in robots, unemployment risk did not increase for low- and medium-skilled workers, but the results showed a significantly lower unemployment risk for high-skilled workers. In line with expectations of SBTC, high-skilled workers appear to benefit from higher labor productivity and lower output prices associated to robot adoption (Graetz & Michaels, 2018). In contrast, our empirical analysis did not confirm the concern that low- and medium-skilled workers are more likely to become unemployed as a result of robotization. This could be due to their comparatively low labor costs, which make it unprofitable for employers to replace these workers with robots. Another reason could be that worker power mediates the impact of technological changes (Fernandez, 2001). Noteworthy, the skill gap widens only if industries invest largely in robots.
At the occupational level, we found clear evidence of increasing occupational inequality, as both direct and relative unemployment risk increase. In line with the TBTC framework, workers in occupations with mainly substitutable MRTs have a significantly higher risk of becoming unemployed, but again only if they work in industries with relatively large investments in industrial robots. In contrast, workers in occupations with other main tasks even benefit from working in industries that invest largely in robots. These findings correspond to the idea that occupations play a major role in structuring inequality across social groups (Damelang et al., 2018; Gil-Hernández et al., 2022, Mouw & Kalleberg, 2010). In particular, in the context of technological change, occupational characteristics and their institutional embeddedness seem to be decisive in explaining the emergence of social inequality (Haupt & Ebner, 2020; Parolin, 2021).
Conclusion
Robotization contributes to an increasing skill inequality and to an increasing occupational inequality. Interestingly, in occupations with mainly MRTs, it is mainly medium-skilled workers who bear the consequences of robotization. Higher education, however, seems to protect against unemployment as a result of robotization even in at-risk occupations in industries with large robot investments. This result is indicative of a better adaptive capacity of high-skilled workers, for example, due to their higher share of transferable skills (Gekara & Snell, 2018) and their larger social networks. Regarding unemployment, the SBTC framework and the TBTC framework are not clearly separated, but rather appear to be intertwined.
Moreover, it is important to consider that the net effect of robot investments on unemployment risk is positive, as the share of workers who became unemployed is generally lower in industries with large robot investments than in industries with small robot investments. Whether this association is due to the fact that mainly prosperous industries invest in automation and robotization or whether particularly workers with a high adaptive capacity work in these industries or whether automation and robotization increases the demand for labor cannot be the subject of this research. Rather, we have shown that robotization increases inequality between different groups of workers, even as the overall risk of unemployment decreases.
While our results of rising skill inequality and rising occupational inequality apply to the German labor market, we expect similar patterns for other industrialized countries. Our basic assumption that the negative effects of robotization are mainly concentrated in a few industries with particularly high robot investments and, at the same time, on workers in exposed positions (due to their skill level or job tasks) should also apply to other countries.
Furthermore, our empirical design has focused on investments in industrial robots, which provides us with valuable insights into robotization in the manufacturing industry. Automation and robotization is not a completely new trend, but a process that started several decades ago. Many of the changes brought about by industrial robots took place in earlier decades. Accordingly, we could not observe disruptive changes in terms of unemployment risk, but we could show a gradual redistributive impact for different types of workers that increase social inequality. In addition to robotization, there are other technological innovations that will impact the future of work, such as artificial intelligence and intelligent automation (Levels et al., 2019). For example, the shift from traditional industrial robots to more connected, collaborative robots that can perceive, understand, and learn about their environment (Goel & Gupta, 2020) has created new opportunities for automation. A new process of labor automation can improve labor conditions and at the same time may increase inequality for different types of workers.
Finally, ongoing automation and robotization may lead to other individual outcomes in addition to direct unemployment transitions, which are outside the scope of our paper. Parolin (2021), for example, finds declining earnings growth for workers in MRT occupations, which is weakened by higher union coverage but at the cost of declining employment shares. Furthermore, increasing insecurity and adjustment problems may also result in indirect outcomes such as lower subjective job security, lower job satisfaction, and a lower level of mental health. Thus, we might even underestimate the impact of automation and robotization on exposed workers.
Supplemental Material
sj-docx-1-wox-10.1177_07308884231162953 - Supplemental material for Who is Replaced by Robots? Robotization and the Risk of Unemployment for Different Types of Workers
Supplemental material, sj-docx-1-wox-10.1177_07308884231162953 for Who is Replaced by Robots? Robotization and the Risk of Unemployment for Different Types of Workers by Andreas Damelang and Michael Otto in Work and Occupations
Footnotes
Acknowledgements
The authors especially want to thank Andreas Haupt, Andreas Eberl, Martin Abraham and two anonymous reviewers for valuable comments and suggestions. Further, they thank Thomas Hinz, Bernd Fitzenberger, and many other colleagues for their valuable feedback at different scientific conferences.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article
Supplemental Material
Supplemental material for this article is available online.
Notes
Author Biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.