
Abstract
Driver understanding of Society of Automotive Engineers Level 1 and Level 2 automated driving systems is essential for safe human–automation interaction as these features are increasingly common in modern vehicles. Yet, little is known about how different training contents shape drivers’ knowledge and performance. This study investigates how variations in training content affect drivers’ knowledge, decision-making, driving performance, and subjective evaluations when using advanced driver assistance systems (ADASs), including adaptive cruise control, lane-keeping assist, and highway driving assist. Sixty participants were randomly assigned to one of three training groups: baseline training, driver-issue training, and feedback-based training. Pre- and post-training knowledge tests, simulator-based driving tests, and subjective questionnaires were used to evaluate outcomes. Results showed that feedback-based training significantly enhanced drivers’ knowledge compared with the other groups. Drivers trained with driver-issue content exhibited more stable lateral control. Training content did not meaningfully affect trust or perceived usefulness, although satisfaction differed across groups. These findings demonstrate that different contents of ADAS training influence driver understanding, driver performance, and subjective experience. This work provides guidance for designing future ADAS training programs that could help drivers to have safe driving experience.
Keywords
Introduction
Advanced driver assistance systems (ADASs) enhance vehicle safety by supporting drivers in maintaining control, preventing hazards, and reducing crash risk ( 1 ). The Society of Automotive Engineers (SAE) defines six levels of driving automation ranging from Level 0 to Level 5 and defines by how much the system engages in driving tasks and the driver’s responsibility to supervise and intervene ( 2 , 3 ). According to SAE, Level 1 (L1) automation automates either steering or speed control while requiring the driver to manage all other aspects of control ( 2 , 4 ). In SAE Level 2 (L2) automation, both longitudinal and lateral control are simultaneously automated under defined operating conditions, but drivers must continue to monitor the environment and take full responsibility of driving ( 2 , 4 ). Although L2 systems offer more assistance than L1 systems, they do not replace the need for driver engagement ( 5 ).
L1 and L2 automations are now widely integrated into many vehicles ( 6 ), and by 2026, roughly half of all vehicles are expected to include them ( 7 ). Common ADAS features in L1 automations include adaptive cruise control (ACC), which maintains a set following distance, and lane-keeping assist (LKA), which provides steering corrections ( 4 ). L2 automation systems such as highway driving assist (HDA) combine ACC and lane centering to provide simultaneous longitudinal and lateral control by adjusting vehicle speed to maintain a safe following distance and keeping the vehicle centered within its lane ( 8 , 9 ). Despite the safety potential of these features, behavioral challenges include inaccurate or incomplete mental models, miscalibrated trust or overreliance on automation, misunderstanding of system capabilities and limitations, and reduced situation awareness ( 5 , 10 – 14 ). These potential negative behavioral effects of ADASs are collectively referred to in this study as driver issues ( 14 ).
These concerns highlight the importance of effective driver training for ADASs. Inadequate training can lead to incorrect mental models of system capabilities and unsafe behavior ( 15 ). Prior research shows that training for L1 and L2 automation can improve drivers’ understanding, monitoring behavior, and appropriate reliance on ADASs. Training contents that clearly explain system capabilities and limitations enhance drivers’ knowledge, reduce misunderstanding of ADAS functions, and improve driving performance ( 16 – 18 ). Building on prior literature, DeGuzman and Donmez ( 19 ) described two broad categories of training content for ADASs. Limitation-focused training explains conditions in which automation may not operate as intended, whereas responsibility-focused training emphasizes driver responsibility for supervising automation, monitoring the environment, and intervening when necessary. This framework highlights that effective training can address both the operational boundaries of ADASs and the human role in maintaining safe vehicle control.
In addition to behavioral outcomes, drivers’ subjective evaluations of trust, acceptance, and perceived understanding play a critical role in determining how they use ADASs in actual driving ( 20 ). This emphasizes the need for driver training to support both objective performance and subjective reactions to automations.
Prior research has shown that information is remembered more effectively when it is processed in relation to the self. Early research demonstrated that self-referential encoding produces stronger memory performance than semantic or other forms of deep processing ( 21 , 22 ). Self-referential encoding engages deeper elaboration and connects new information to existing self-schemas, resulting in stronger and more durable memory ( 23 ). Driver-issue-based training, which presents typical driver tendencies that humans may exhibit when using ADASs, may increase the perceived relevance of the material and promote deeper processing, retention, and understanding of ADAS-related information.
Despite the importance of training content, no study has systematically compared different types of training content or examined how variations in training content shape drivers’ cognition and performance across L1 and L2 automations. The present study addresses this gap by examining three related but distinct types of training content that build on the limitation-focused and responsibility-focused framework. Baseline training focuses on ADAS capabilities and limitations and is conceptually similar to limitation-focused training. The driver-issue training extends the baseline training by emphasizing common negative behavioral consequences of drivers, including overtrust, reduced situation awareness, and misunderstanding of system capabilities. This training incorporates elements of responsibility-focused training while also extending the existing framework by explicitly addressing broader human factor concerns that go beyond responsibility alone. Feedback-based training further extends the baseline capabilities and limitations content by providing drivers with performance feedback during practice. Together, these three conditions allow a grained test of how different emphases in training content influence drivers’ knowledge of ADASs, decision-making at system limitations, driving performance, and subjective evaluations when using ACC, LKA, and HDA. The findings aim to support the development of more effective training content for promoting safe and appropriate use of ADAS features. This study builds on an earlier technical report prepared for the American Automobile Association (AAA) Foundation for Traffic Safety ( 24 ). The present manuscript provides a peer reviewed synthesis with a deeper theoretical framework and a more detailed and focused analysis of training content than the practitioner oriented report.
Methods
Participants
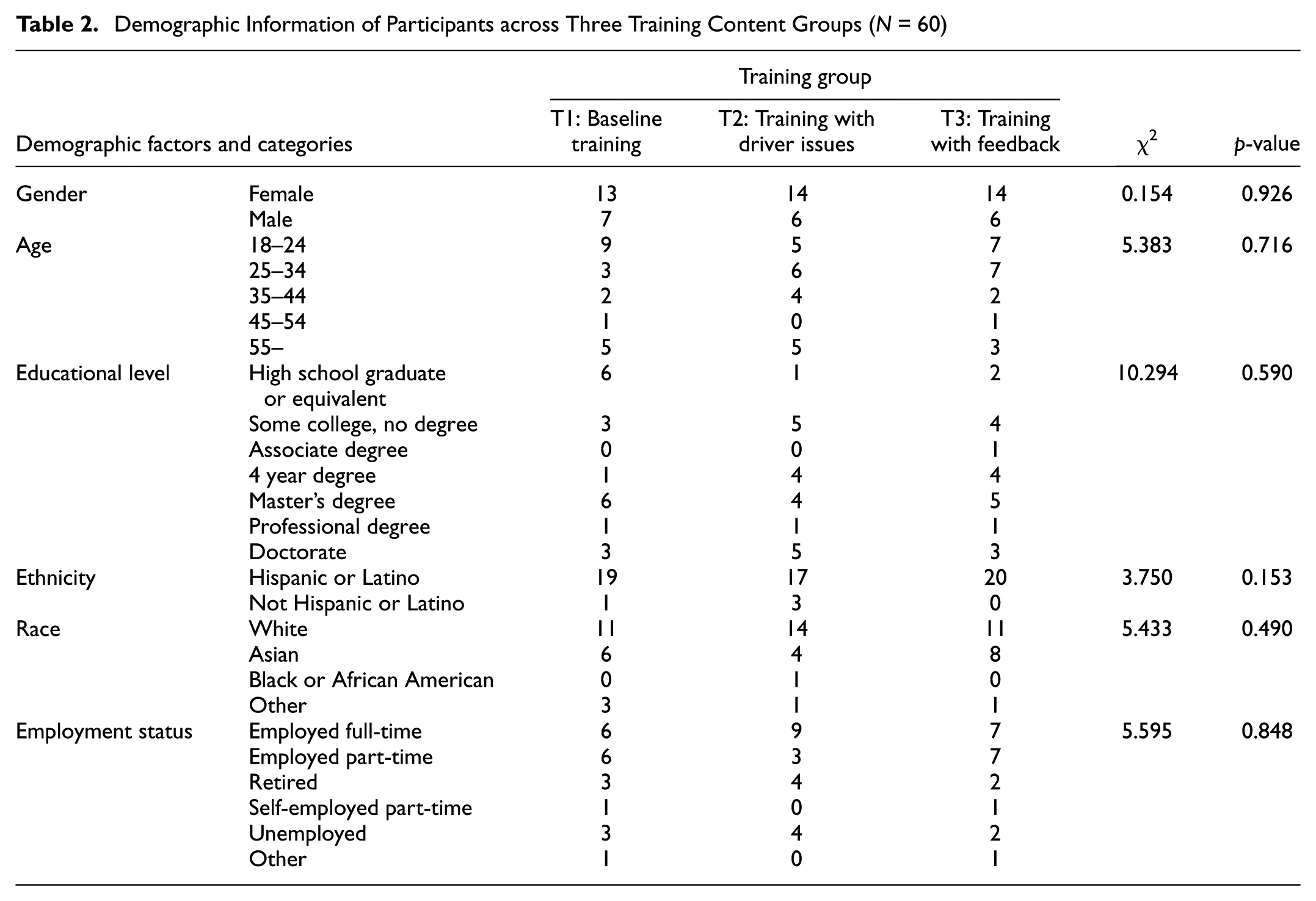
Sixty participants (40 females and 20 males) participated in this experiment. All participants held a valid U.S. driver’s license and had at least 1 year of driving experience. Recruitment took place via the StudyFinder website, email, and flyers posted around the State College, Pennsylvania, area. StudyFinder serves as Pennsylvania State University’s public platform for research participant recruitment. Participants’ age ranged from 18 to over 55 years. The racial and ethnic composition of the sample was as follows: 60% Caucasian, 30% Asian, 1.7% African-American, and 8.3% from other backgrounds. With respect to driving experience, 70% of the participants had over 3 years of experience, 25% had between 1 and 3 years, and 5% reported less than a year of experience. The study received approval from the Institutional Review Board at Pennsylvania State University (STUDY00020300). Participants were compensated U.S. $30 after completing the experiment.
Apparatus
A fixed-based console driving simulator, the STISIM Drive® M300WS-Console system, was used to examine participants’ decision-making and driving performance with respect to L1 and L2 automation limitations during the experiment. As shown in Figure 1, the driving simulator operated on a Dell™ workstation and featured three display screens that offered a 135° field of view. The system incorporated a high-fidelity STISIM Drive® automated driving system (ADS), a full-size steering wheel with active force feedback, and two advanced pedal controls. The STISIM Drive® platform used Open Module to program customization of L1 and L2 automations features such as ACC, LKA, and HDA. All ADAS status indicators appeared on the left-hand side of the instrument cluster, while the vehicle’s speed was shown in green numerical digits at the center of the display.

Driving simulator and Society of Automotive Engineers Level 1 and Level 2 automations icons.
Activation and Deactivation of L1 and L2 Automations
Each L1 and L2 automation was engaged using designated buttons positioned on either side of the steering wheel (Figure 2). As shown in Figure 2a, the HDA and LKA features were controlled through the buttons on the left-hand side. Figure 2b shows that the ACC feature was enabled by pressing the button on the right-hand side of the wheel, and participants adjusted their set speed using the (+/−) controls. Because there is a limited number of programmable buttons, following-distance settings were not implemented. Instead, a moderate headway was established, and participants were told that only speed adjustments were available.
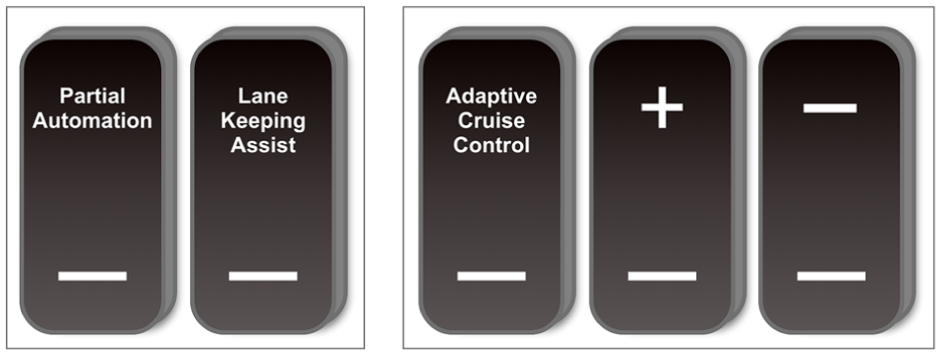
Advanced driver assistance system activation/deactivation functions in the driving simulator: (a) highway driving assist and lane-keeping assist buttons and (b) adaptive cruise control feature and speed adjustment buttons.
Materials
Demographic and Driving History Questionnaire
The demographic and driving history questionnaire gathered demographic data from participants such as their age, gender, ethnicity, education level, and employment status. It also contained questions about participants’ driving history, such as how long they have been driving, how often they drove, and their self-assessed confidence level in driving.
Experience Questionnaire
The experience questionnaire measured how familiar participants were with ADASs. It asked whether they owned a vehicle that included key ADASs, such as ACC, LKA, or had, and how often they used those features using a 4-point Likert scale, where 1 represented "never" and 5 represented "every time."
Pre- and Post-Training Knowledge Test
The pre- and post-training knowledge test assessment aimed to measure the participants’ pre and post knowledge of L1 and L2 systems. The questions included multiple-choice questions that tested human–machine interface (HMI) indicators and the activation/deactivation process of each ADAS, and true/false questions that assessed their understanding of the limitations of ADASs.
Questionnaire for Trust between People and Automation
The questionnaire for trust between people and automation ( 25 ) was employed to evaluate 12 dimensions associated with trust in automated systems, including deception, underhanded manner, suspicion, beware, harm, confidence, security, integrity, dependability, reliability, entrust, and familiarity. Responses were recorded using a 7-point Likert scale ranging from 1 ("strongly disagree") to 7 ("strongly agree").
System Acceptance Questionnaire
The system acceptance questionnaire ( 26 ) includes nine items aimed at measuring how users accept new technologies focusing on two aspects: usefulness (five items) and satisfaction (four items). Participants responded using a 5-point scale ranging from −2 to +2, where −2 indicated negative evalutaions (e.g., useless, unpleasant) and +2 indicated positive evaluations (e.g., useful, pleasant). Following the method used in previous studies ( 18 , 27 ), items scores were coded such that higher values reflected more positive acceptance, and the scores were averaged to calculate an overall acceptance score.
Experiment Design
A between-subjects design was used in this study with the training content (T1: baseline, T2: driver issues, T3: feedback-based) and ADAS features (ACC, LKA, HDA) as independent variables. As shown in Figure 3, sixty participants were randomly assigned to one of the three training groups, with 20 participants in each group. The T1 group (baseline training) provided an overview of ADAS features, including activation/deactivation procedure, HMI design explanations, and system limitations. The T2 group (driver-issue training) received the same baseline training as the T1 group and also participants received training on common driver-related issues, such as overtrust, reduced situation awareness, and misunderstanding of system capabilities. The T3 group (feedback-based training) received the same baseline training as the T1 group along with personalized feedback after the pre-training knowledge test. Feedback was both verbal and visual (green/red indicators), and incorrect responses were followed by instructor explanations.
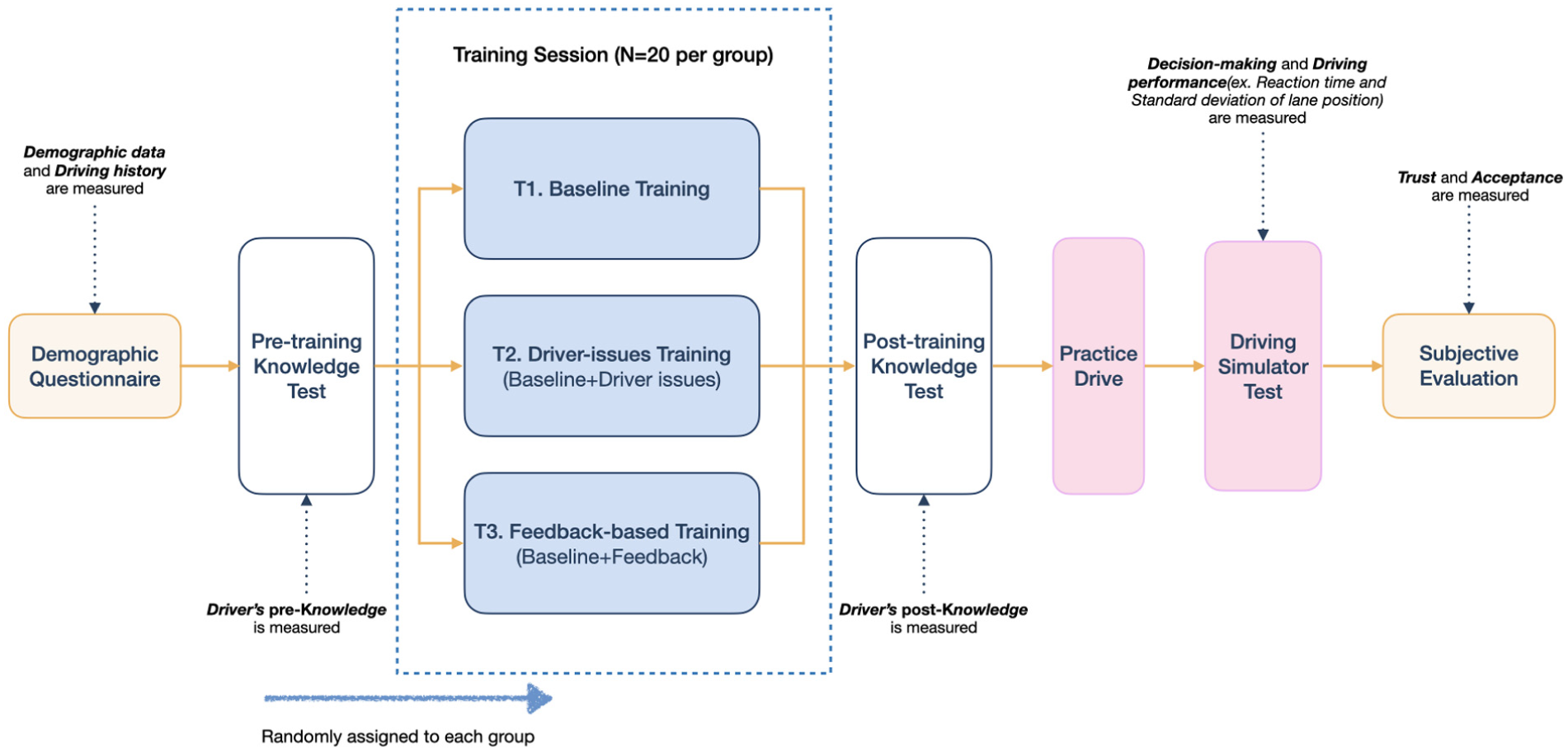
Overview of the experiment design.
Design of Training Content
All training contents were provided through video with texts and visual aids, focusing on ACC, LKA, and HDA features. Each feature was introduced with a general description, HMI designs, and activation/deactivation instructions based on owner’s manuals. In regards to the activation process, ACC had additional instructions on adjusting speed and following distance, while LKA and HDA focused on turning the feature on and off. Since HDA integrates ACC and lane centering, it was explained in conjunction with both. The second portion of training addressed ADAS feature limitations, including adverse weather, poor lighting, and sharp curves. Apart from general system limitations, specific limitations related to lane visibility were included for LKA and sudden speed change was described for ACC. Each category of limitations was outlined in detail and paired with images depicting representative scenarios. For HDA, the restrictions were conveyed by summarizing the standard operating guidelines associated with L2 automation.
The T2 participants received additional information on the driver-related issues such as overtrust, false assumptions, and reduced situation awareness. The training emphasized potential risks and reinforced the need for active supervision while using ADAS features. The content clarified that L1 and L2 systems are assistive, not replacements for driver responsibility. The T3 participants received additional feedback after the knowledge test.
Dependent Variables
The dependent variables included driver’s knowledge improvement of ADASs, decision-making, driving performance, and subjective evaluation.
Drivers’ knowledge of ADASs was measured using a knowledge test administrated before and after training. The test measured understanding of three features, namely ACC, LKA, and HDA. The assessment included multiple-choice questions about activation and deactivation procedures and HMI designs, and true/false questions about ADAS capabilities and limitations. Each participant’s score was calculated as the proportion of correct responses out of the total number of items, representing their knowledge accuracy. Knowledge improvement was computed as the difference between post-training and pre-training accuracy scores.
Drivers’ decision-making in response to ADAS capabilities and limitations was evaluated by comparing their responses to the expected correct actions. Correct actions included deactivating the feature when a system limitation occurred and maintaining activation with no response when no limitation was present. Participants were able to deactivate ACC and HDA either by pressing the button or by using the brake pedal, whereas LKA could only be deactivated by pressing its button. Each decision was coded as correct (=1) when it aligned with the expected action, either deactivating the feature when a limitation was reached or maintaining activation when no limitation was present, and coded as incorrect (=0) when the participants made an incorrect decision.
Driving performance was assessed using the reaction time and standard deviation of lane position (SDLP). Reaction time was defined as the interval between the onset of a system limitation and the participant’s correct deactivation of the feature. Reaction time was analyzed only for trials in which the participant made a correct decision. SDLP reflected drivers’ ability to maintain stable lateral control during periods in which an ADAS limitation was present ( 28 ). For LKA, SDLP measurement began at the moment the limitation was presented to participants, capturing lane-keeping performance while the system remained active. For ACC and HDA, SDLP measurement began after participants deactivated the feature, representing their lane-keeping performance when manual control was required.
Driver’s subjective evaluation was collected after the experiment was done. Measures of trust and acceptance of ADASs were obtained using the questionnaires described in the Materials section.
Scenarios
A total of nine driving scenarios were implemented in the driving simulator to assess participants’ understanding of the capabilities and limitations of ADASs. Figure 4 illustrates sample visualizations of these driving scenarios. The scenarios were designed based on real-world driving conditions such as sharp curves, lane line visibility, and traffic flow changes where ADAS limitations are known to arise. As shown in Table 1, Scenario 1 served as a baseline to let the participants activate and deactivate ACC, LKA, and HDA. In contrast, Scenario 9 acted as a control scenario with no system limitations. Three scenarios (Scenarios 3, 4, and 8) focused on ACC limitations and two scenarios (Scenarios 2 and 5) addressed LKA limitations. Two scenarios (Scenarios 6 and 7) were designed to test drivers’ ability to distinguish between ACC and HDA during curve situation. Scenario order was randomized across participants to minimize order effects. Although these scenarios simulated conditions where L1 and L2 systems may not work properly, all features were programmed to operate correctly. The goal was to determine whether drivers could identify the limitations and make appropriate decisions about whether to maintain or deactivate them during each scenario.
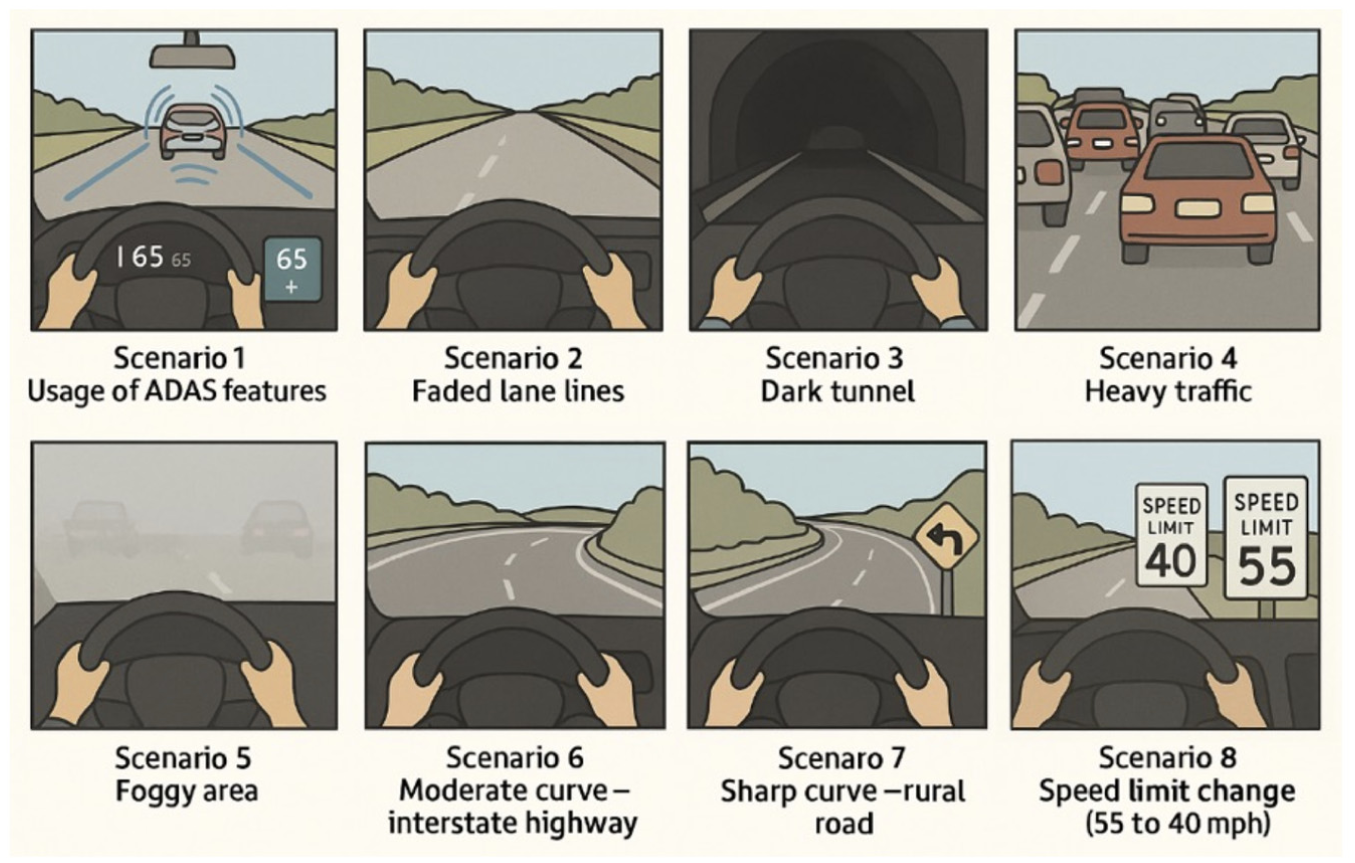
Driving simulator test scenarios.
Driving Scenarios of Advanced Driver Assistance Systems
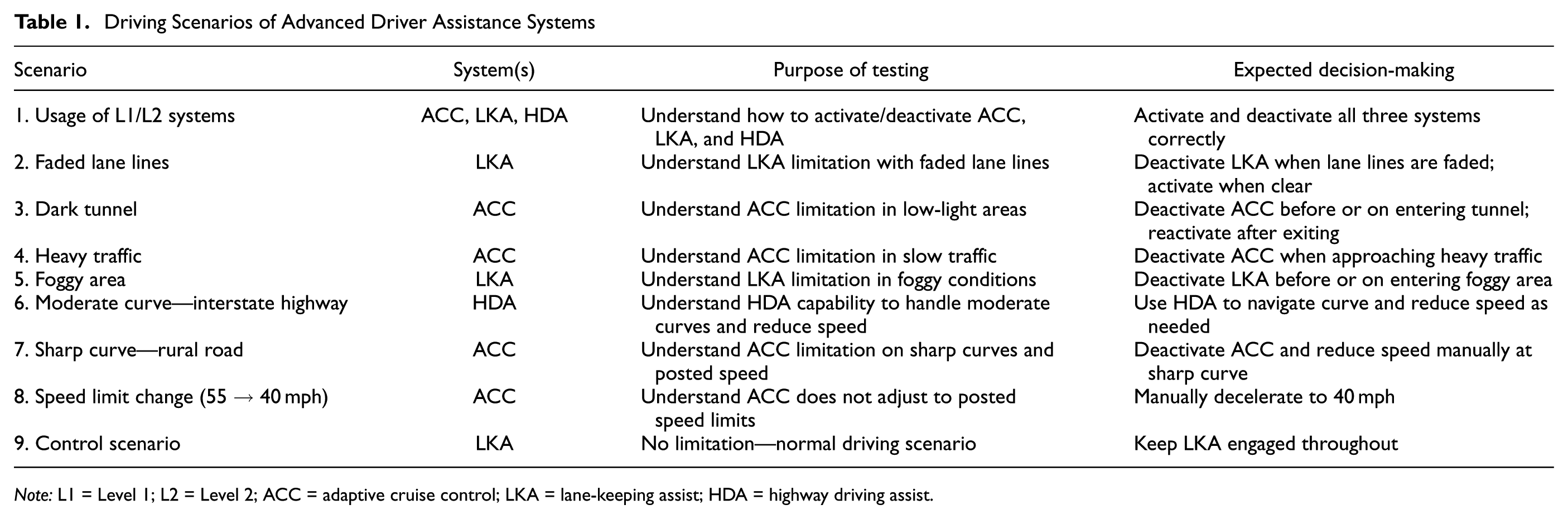
Note: L1 = Level 1; L2 = Level 2; ACC = adaptive cruise control; LKA = lane-keeping assist; HDA = highway driving assist.
Procedure
On arriving at the lab, participants were welcomed and given a brief overview of the study (Figure 5). After providing informed consent, they were asked to complete a demographic survey. Then, participants took a pre-training knowledge test to assess their initial understanding of ACC, LKA, and HDA. Participants in T1 and T2 completed the knowledge test without receiving any feedback. In contrast, those in T3 received immediate feedback through Qualtrics, which indicated incorrect responses and displayed the correct answers. In addition, participants in T3 briefly discussed their responses with the experimenter to clarify any misunderstandings.

Experimental procedure.
After completing the pre-training knowledge test, all participants watched a training video corresponding to their assigned group. Participants in T1 and T3 watched a baseline training video, while those in T2 viewed a baseline video with additional information on driver-related issues. Following the video training, participants took a post-training knowledge test identical to the pre-training knowledge test to evaluate learning outcomes resulting from each training.
Then, participants moved onto the driving simulator test. Before the actual test, they received a tutorial on operating the driving simulator and familiarized themselves with the steering wheel, pedals, and ADAS feature buttons. During this tutorial, they completed a practice drive similar to the actual driving task to help them practice operating these ADAS features with buttons. After the practice drive, participants completed nine driving scenarios (Table 1), each demonstrating different limitations of L1 or L2 automation. Before starting each driving scenario, written instructions were displayed guiding participants to activate one of the ADAS features throughout the scenario. At the start of each scenario, verbal instruction was given to activate L1 or L2 automation and use it throughout the scenario as needed. They were told to deactivate the system when they thought that it had reached its limitations and were instructed to reactivate it as soon as the system function became capable. To prevent fatigue, each driving scenario was limited to 2 min, and the full driving session lasted approximately 20 min.
Data Analysis
The statistical analysis aimed to examine the effectiveness of the three training content conditions using several dependent variables, such as participants’ knowledge improvement on the post-training knowledge test, decision-making accuracy in response to ADAS feature limitations, and overall driving performance analyzed through reaction time and SDLP.
To assess the effectiveness of the different training programs, a two-way analysis of covariance (ANCOVA) was used to evaluate how the training content influenced knowledge improvements across three training contents applying gender, age, and education level as covariates.
To analyze drivers’ use of ADAS features during the experiment, a logistic regression was applied to examine if the training content influenced the drivers’ correctness of decision-making in ADAS limitations across eight driving scenarios with exclusion of the first baseline scenario. To evaluate driving performance, a two-way ANCOVA was performed to analyze reaction time and SDLP, considering training content groups and ADAS features as independent variables. Gender, age, education level, and pre-training knowledge accuracy were used as covariates. Reaction time was analyzed only for trials in which drivers made correct decisions. For subjective evaluations, a two-way ANCOVA was also conducted to assess the effect of training content and ADAS features on driver trust and acceptance.
Results
Descriptive Analysis
A descriptive analysis was conducted to explore demographic data across the three training groups (
Demographic Information of Participants across Three Training Content Groups (N = 60)
Knowledge Accuracy of ADAS Features
Knowledge Improvement across Different Training Content Designs
Descriptive statistics summarizing the extent of knowledge improvement across training content designs are presented in Table 3.
Descriptive Statistics of Knowledge Improvement
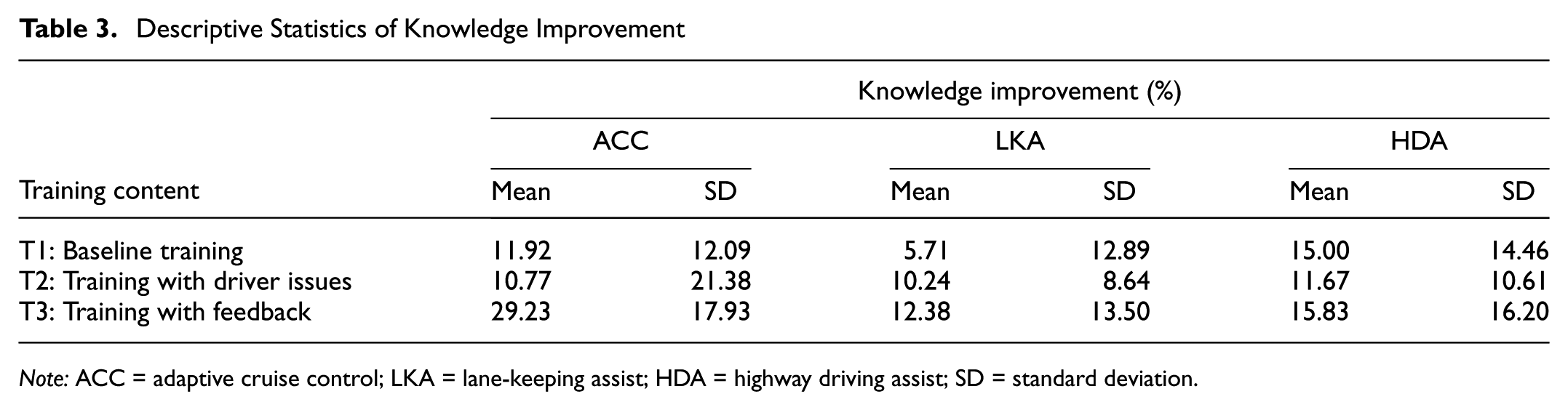
Note: ACC = adaptive cruise control; LKA = lane-keeping assist; HDA = highway driving assist; SD = standard deviation.
A two-way ANCOVA was performed with training content and three ADAS features as independent variables applying gender, age, and education level as covariates. The results indicated a statistically significant main effect of training content (F(2, 168) = 5.99, p = 0.003, η2 = 0.07) as well as a significant main effect of ADAS features (F(2, 168) = 4.32, p = 0.015, η2 = 0.05). As illustrated in Figure 6, a significant interaction effect was found between training content and ADAS features on drivers knowledge improvement (F(2, 168) = 2.53, p = 0.042, η2 = 0.06). A post-hoc analysis revealed that participants who received feedback-based training led had significantly greater knowledge improvement than those in the baseline training (p = 0.004) and driver-issue training groups (p = 0.003) (Figure 7). When comparing across ADAS features, knowledge improvement for ACC was significantly higher than for LKA (p = 0.01), while the difference between ACC and HDA was not statistically significant (p = 0.47). However, no significant impact of the covariates on knowledge improvement was observed.
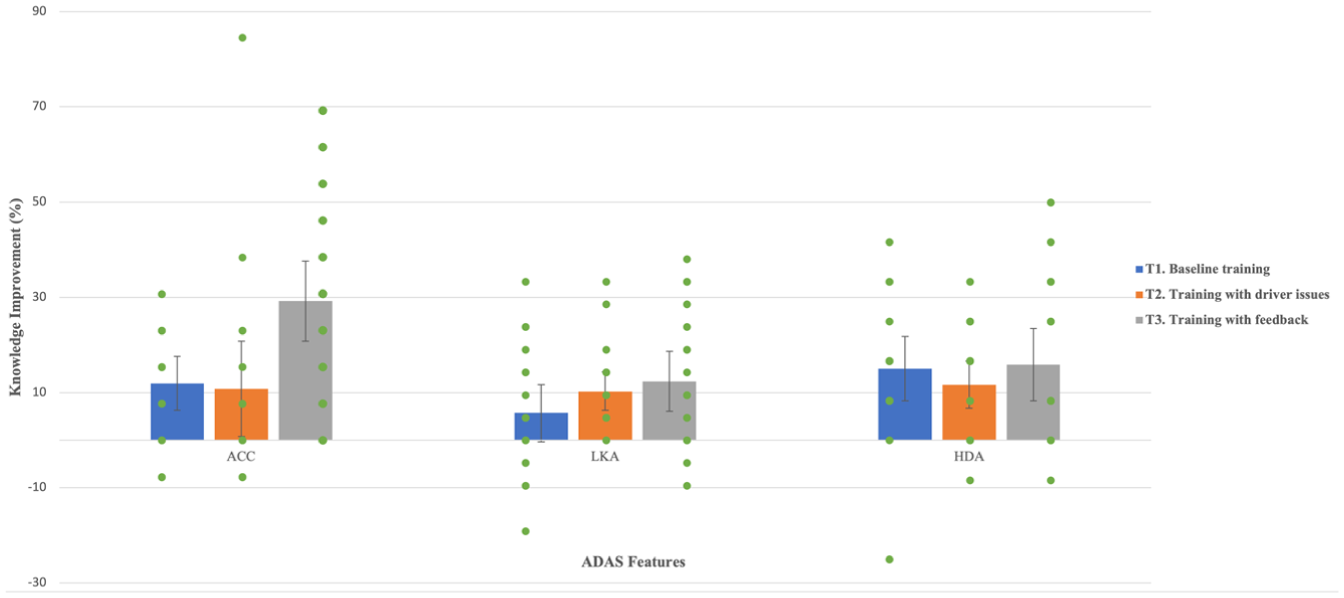
The interaction between training content and advanced driver assistance system (ADAS) features on driver knowledge improvement (95% confidence interval).
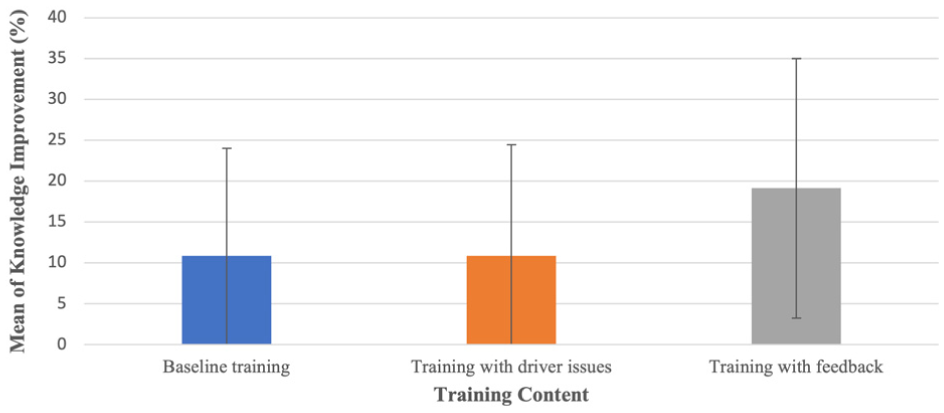
Improvements in drivers’ advanced driver assistance system knowledge across training content (95% confidence interval).
Notably, knowledge improvement for LKA and HDA remained relatively consistent across all three training groups. In contrast, participants in the feedback-based training group demonstrated significantly higher improvement in ACC compared with those in the baseline training (p < 0.001) and driver-issue training groups (p < 0.001).When examining baseline and driver-issue training content, knowledge improvements across the three systems were generally comparable, with the exception that HDA showed significantly greater improvement than LKA within the baseline training group (p = 0.048). Meanwhile, under the feedback-based training, drivers showed substantially higher knowledge improvement for ACC than for LKA (p < 0.001) and HDA (p = 0.005).
Decision-Making Accuracy in ADAS Features
Drivers’ Decision-Making Accuracy for ADAS Feature Capabilities and Limitations
A logistic regression analysis was conducted to examine how different training content groups and three ADAS features influenced correctness of decision-making in response to ADAS feature limitations (Figure 8). The result did not show statistical significance (χ2(8) = 12.177, p = 0.143), indicating that it did not reliably account for variation in decision-making accuracy. Further analysis of individual predictors revealed that none significantly contributed to predicting whether drivers responded correctly in ADAS feature limitations. Although the correctness of decision-making ranged from 67.50% to 71.87% across training groups, indicating satisfactory performance to ADAS limitations, the effect of training content on decision-making accuracy was not statistically significant. As shown in Figure 8, drivers demonstrated the highest decision-making accuracy with LKA (M = 75.0%), followed by ACC (M = 69.9%) and HDA (M = 58.3%).
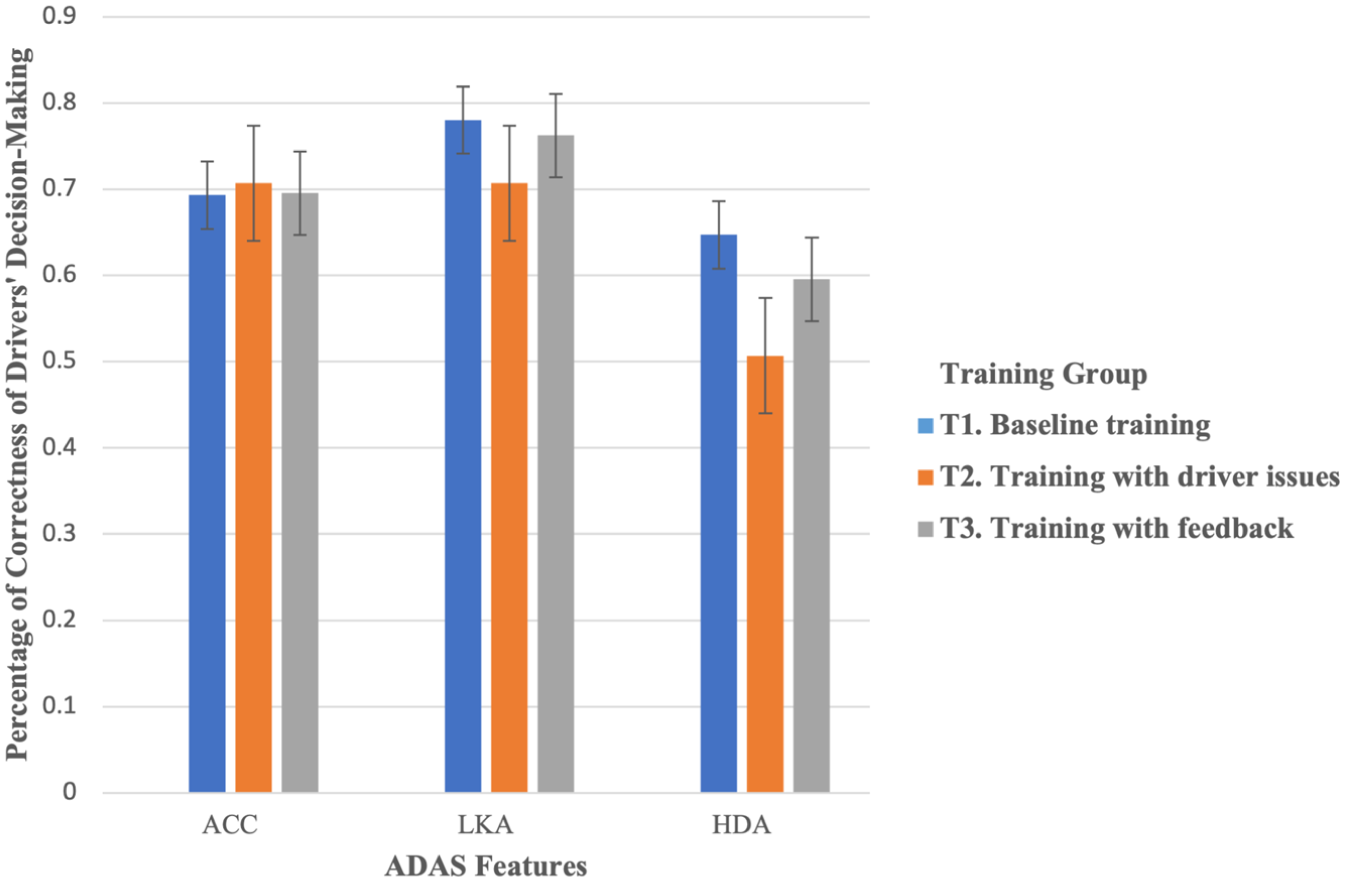
Percentage of correctness of drivers’ decision-making across training groups (95% CI).
Drivers’ Reaction Time to ADAS Limitations
The analysis presents the mean and standard deviation of reaction time for each training content group. In this analysis, a “pre-limitation reaction” refers to instances where drivers manually deactivated the system after detecting a potential hazard but before the designated start of the limitation scenario. “Post-limitation reaction” refers to the time when driver deactivated the system after the start of the limitation. For such responses, reaction times were recorded using the actual values, which could include negative numbers. Since we wanted to focus on the reaction time after the limitation scenario occurs, we mainly focused on “post-limitation reaction” data. As shown in Table 4, regardless of the training content group, the results indicated that most drivers responded to ADAS limitations after the starting point of the limitations. The mean of post-limitation reaction time was M = 10.47 s, SD = 9.20. The percentage of drivers who responded to ADAS limitations either before or after the onset of the limitation was also calculated.
Frequency and Percentage of Pre- and Post- Limitation Reaction Time for Advanced Driver Assistance System Limitations
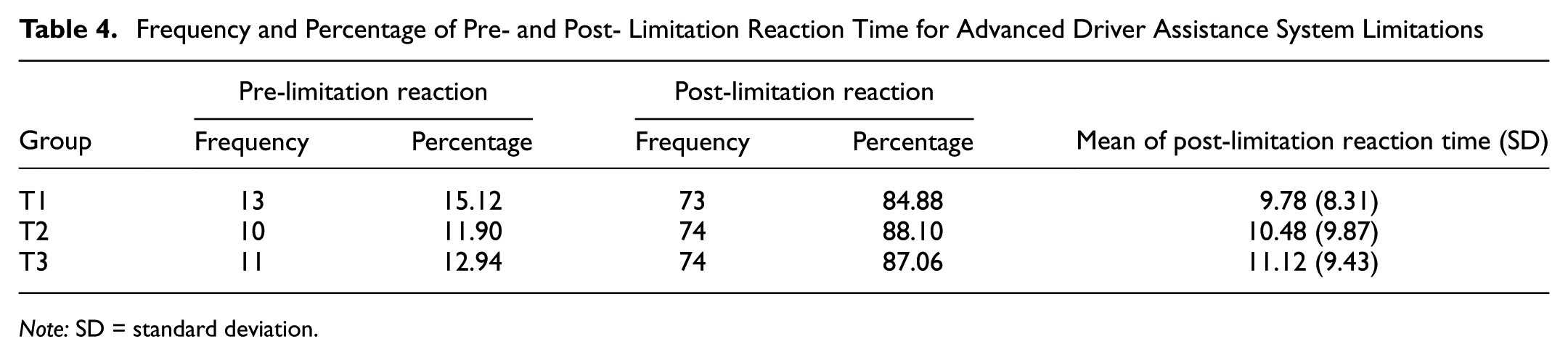
Note: SD = standard deviation.
A two-way ANCOVA was performed to analyze drivers’ reaction time, using training content groups and ADAS features as independent variables. Gender, age, education level, and pre-training knowledge accuracy were included as covariates. As illustrated in Figure 9, there was a significant main effect of ADAS features (F(1, 212) = 16.96, p <.001, η2 = .074), which indicated that drivers took longer to respond to ACC limitations than to LKA limitations. In contrast, neither the main effect of training group (F(2, 212) = 0.016, p = 0.984) nor the interaction effect between training group and ADAS features (F(2, 212) = 0.677 p = 0.509, η2 = .006) reached statistical significance. Scenarios 6 and 9 were excluded from the analysis since the participants were not required to take any action.
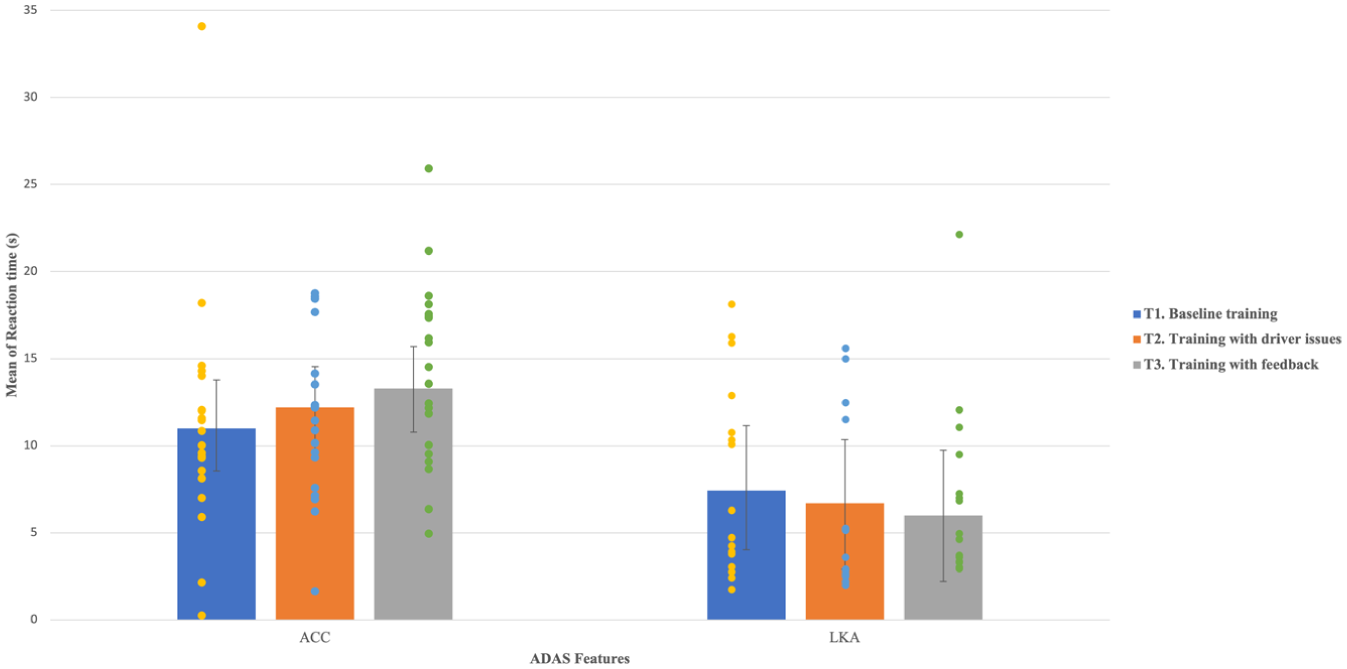
Drivers’ reaction time across advanced driver assistance system (ADAS) features (95% confidence interval).
Driving Performance in ADAS Features
To explore the effect of training content and ADAS features on drivers’ SDLP, a two-way ANCOVA was conducted. As shown in Figure 10, the results revealed a significant main effect of training content (F(2, 467) = 3.473, p = 0.032) on drivers’ SDLP. Specifically, drivers who received training focused on driver issues exhibited significantly lower SDLP (M = 0.78) than those in the feedback-based training group (M = 1.18, p = 0.010).
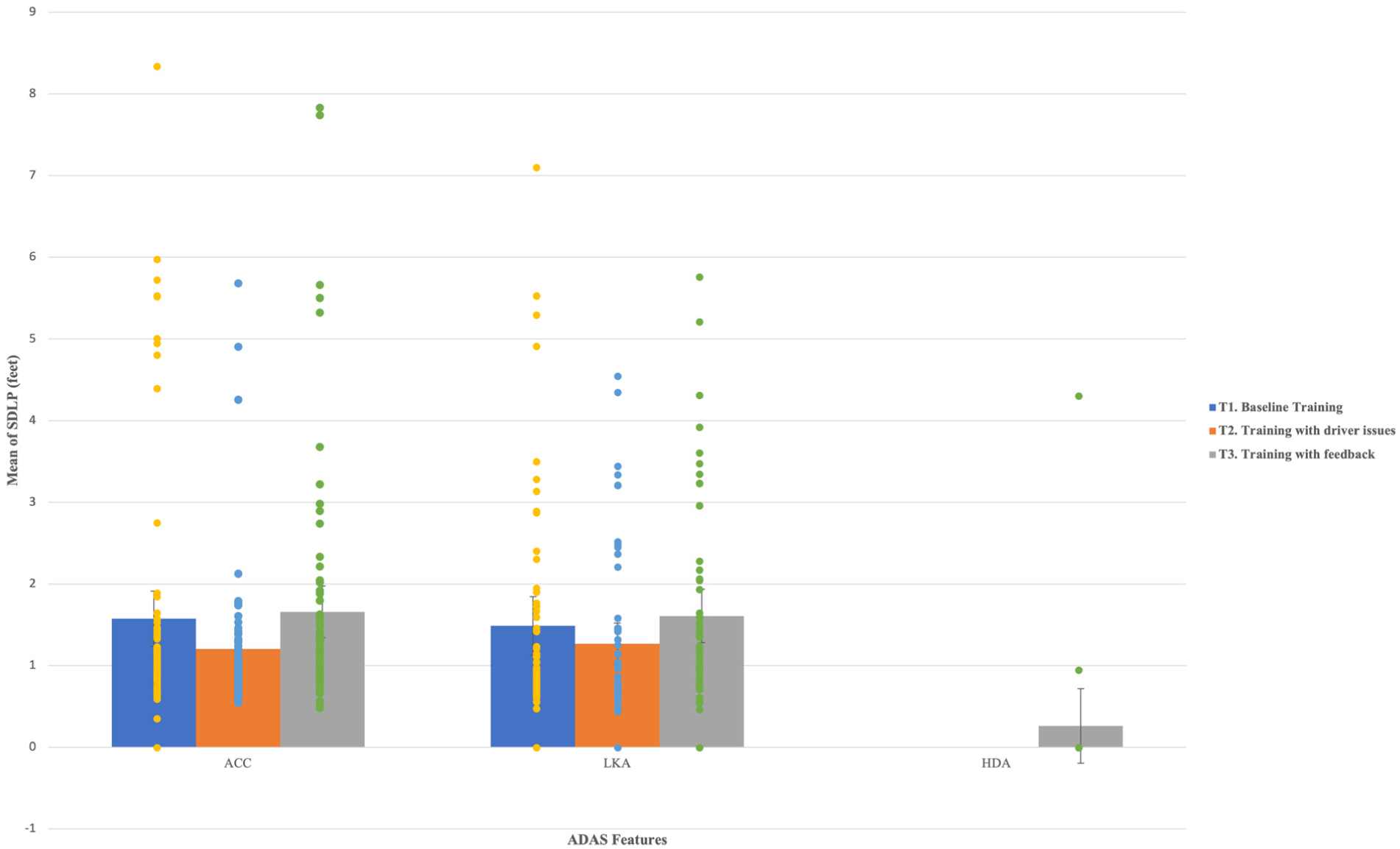
Drivers’ standard deviation of lane position (SDLP) across advanced driver assistance system (ADAS) features (95% confidence interval).
The analysis also indicated a significant main effect of ADAS features (F(2, 467) = 35.96, p < .001). Pairwise comparisons showed that drivers experienced significantly greater SDLP during ACC limitation scenarios (M = 1.48) compared with the control scenarios that did not require system deactivation (M = 0.09, p < .001). However, the interaction between training content and system feature was not statistically significant (F(2, 467) = 0.238, p = 0.917).
Drivers’ Subjective Evaluation
As summarized in Table 5, for the trust variable, the results showed no significant main effect of training content (F(2, 51) = 0.225, p = 0.799). None of the covariates significantly influenced trust either, including gender (F(1, 51) = 1.021, p = 0.317), education level (F(1, 51) = 3.426, p = 0.070), age (F(1, 51) = 0.036, p =0 .851), ACC pre-training knowledge accuracy (F(1, 51) = 1.104, p = 0.298), LKA pre-training knowledge accuracy (F(1, 51) = 0.129, p = 0.721), and HDA pre-training knowledge accuracy (F(1, 51) = 0.061, p = 0.807).
Drivers’ Subjective Evaluation of Advanced Driver Assistance System Features
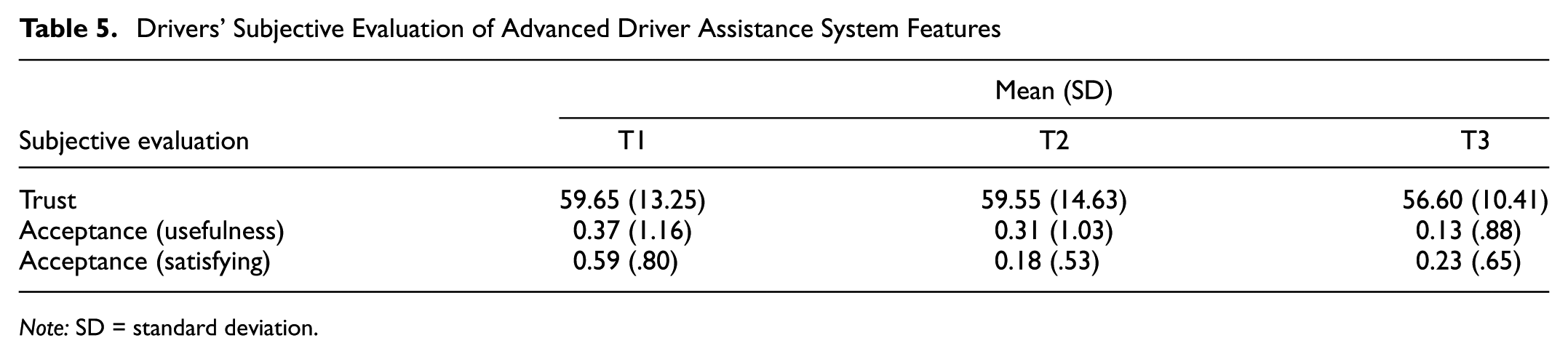
Note: SD = standard deviation.
For the usefulness variable, among the covariates, both gender (F(1, 51) = 6.030, p = 0.018) and education level (F(1, 51) = 15.211, p < .001) showed significant effects, suggesting that these variables influenced drivers’ perceptions of usefulness. However, other covariates were not significant: age (F(1, 51) = 3.872, p = 0.055), ACC pre-training knowledge accuracy (F(1, 51) = 0.610, p = 0 .438), LKA pre-training knowledge accuracy (F(1, 51) = 2.902, p = 0.095), and HDA pre-training knowledge accuracy (F(1, 51) = 0.621, p = 0.434). The main effect of training content was also not significant (F(2, 51) = 0.840, p = .437).
In contrast, for the satisfaction variable, training content had a statistically significant effect (F(2, 51) = 3.558, p = 0.036). Post-hoc comparisons revealed that participants in the baseline training group (T1) reported significantly higher satisfaction (M = 0.588, SD = 0.800) than those in the driver-issue group (T2; M = 0.175, SD = 0.526, p = 0.012) and the feedback-based group (T3; M = 0.225, SD = 0.525, p = 0.045). No significant difference was found between T2 and T3 (p =0 .574). Among the covariates, only education level had a significant impact on satisfaction (F(1, 51) = 5.287, p = 0.026), whereas gender (F(1, 51) = 1.364, p = 0.248), age (F(1, 51) = 0.428, p = 0.516), and all pre-training knowledge accuracy variables were not significant.
Discussion
This study investigated how three types of training content, baseline training, driver-issue training, and feedback-based training, affect drivers’ knowledge, decision-making, and performance when interacting with L1 and L2 automations. The findings revealed that particularly for ACC, feedback-based training led to the greatest improvements in ADAS knowledge, while baseline and driver-issue training produced smaller and more similar gains across ADAS features. Despite improvements in conceptual knowledge, training content did not significantly influence decision-making accuracy in ADAS limitation scenarios even though correctness remained relatively high across all groups. Reaction time was influenced by the type of ADAS features rather than training content, which indicated that drivers responded faster or slower depending on system demands, not instructional style. For driving performance, training with driver issues produced significantly lower SDLP compared with feedback-based training, suggesting more stable lateral control. Subjective evaluations showed no training effect on trust or usefulness, but satisfaction was highest in the baseline group, which could potentially reflect cognitive load differences across training types.
A key contribution of this research lies in its emphasis on what is taught in training, rather than how it is delivered. While prior studies largely focused on either training styles (e.g., demonstration and practice) or training modes using similar content ( 28 , 29 ), the present study demonstrates that variations in training content alone can result in measurable differences in learning and behavior. There were improvements in post-training knowledge in all three training groups. However, feedback-based training was more effective in helping drivers understand L1 and L2 automations’ capabilities and limitations compared with baseline or driver-issue training. As such, integrating feedback-based training content into driver training could enhance the training effectiveness of drivers and improve understanding of the automation systems.
However, this knowledge improvement in feedback training did not fully lead to better driving performance. Interestingly, drivers who received training on driver issues demonstrated more stable lateral control, as reflected by lower SDLP, compared with drivers in the feedback training condition. This finding suggests that training content emphasizing driver responsibilities and the potential negative consequences of inappropriate use of ADASs may support more consistent lane-keeping performance. A plausible explanation is that training focused on driver issues encourages drivers to adopt more careful and consistent control strategies than feedback-based training. However, because the present study did not include additional behavioral or perceptual measures such as glance behavior or self-reported risk perception, this interpretation should be regarded as tentative. Overall, the results provide preliminary evidence that driver-issue-focused training can influence driving performance. They are also consistent with previous work ( 19 ) showing that training centered on driver responsibilities can enhance driver knowledge and promote appropriate behavior to a degree comparable to training that focuses on system limitations. These findings reinforce the importance of addressing both system characteristics and the driver role and responsibility in the design of effective ADAS training programs.
Unfortunately, the findings suggest that knowledge improvement did not translate into better decision-making accuracy. Feedback-based training significantly improved drivers’ understanding, yet it failed to enhance decision-making accuracy or reduce reaction time. This challenges the common assumption that knowledge automatically leads to better behavior. In addition, longer reaction times and a higher SDLP were observed in response to LKA limitations compared with ACC, indicating that LKA might be more challenging for drivers, especially in detecting sudden lane changes. The interaction between training content and L1 and L2 systems emphasizes the need for tailored training programs that consider the distinct challenges associated with different L1 and L2 systems.
In our study, several limitations should be noted. Firstly, we did not simulate actual system malfunctions. The goal of the experiment was to examine whether drivers could recognize system limitations and take over control, not how they would respond if the system failed unexpectedly. During the post-experiment debriefing, some participants reported that they chose not to deactivate the automation when the system limitation was not visually obvious. This suggests that drivers may rely on the system unless the need for takeover is clearly acknowledged. Future research should therefore incorporate simulated malfunction events to more accurately assess drivers’ real-time intervention behaviors in situations where the system behaves unexpectedly.
Secondly, the participant sample, which was primarily drawn from a university area, may not represent the broader U.S. driving population. This could limit generalizability, as participants skewed younger and more educated. Future research should include more diverse age, experience, and educational backgrounds.
In addition, the present study did not identify subgroups of drivers who might benefit more from one training type than another. Future studies that expose the same drivers to multiple training approaches could more directly examine individual differences in susceptibility to ADAS training.
Thirdly, although the study included representative limitation scenarios, the small set of scenarios may not reflect the full diversity of conditions and ADAS limitations that drivers face in real-world driving. Future research should incorporate a broader design of scenarios to better evaluate how drivers respond across different situations.
Fourthly, this study did not include additional behavioral measures, such as eye glance behavior and risk perception, that would allow a stronger assessment of whether the SDLP different patterns reflect more cautious driving for the driver-issue training condition. As a result, this finding should be interpreted with caution and examined in future studies that combine SDLP with additional behavioral and subjective indicators of cautious use of ADASs.
Lastly, the driving simulator controls did not fully replicate real-world driving. For example, participants had to manually switch off LKA to indicate that they noticed a limitation. In an actual vehicle, one does not have to turn off LKA when limitations occur. This procedural difference may have affected reaction times and system use behavior. Future studies should employ more realistic controls or on-road testing to make it similar to real-world driving.
Conclusion
This study examined how three types of training content influence drivers’ understanding and performance when using ADAS features. Feedback-based training showed the greatest improvement in drivers’ knowledge, especially for ACC, whereas decision-making accuracy and reaction time were not affected by training content. Driver-issue training led to more stable vehicle control, which could imply that exposure to misuse cases may enhance monitoring and control behavior. These findings contribute to ADAS training research by showing that different training contents support different aspects. Feedback-based training strengthens system understanding, while driver-issue content may enhance safer driving performance. Practically, manufacturers and educators should combine feedback, clear system explanations, and exposure to misuse scenarios to address the diverse cognitive demands of L1 and L2 automations. Future research should investigate longer-term, various scenarios, or adaptive training approaches to better support real-time decision-making and takeover performance.
Footnotes
Acknowledgements
ChatGPT was used for language editing, grammar correction, and improving the clarity of text in this manuscript. All scientific content was created by the authors.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Y. Zhang, R.Y. Kim; data collection: R.Y. Kim; analysis and interpretation of results: R.Y. Kim, Y. Zhang; draft manuscript preparation: R.Y. Kim, Y. Zhang. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was funded by the AAA Foundation for Traffic Safety under contract number 51187.