
Abstract
Drones and electric vehicles (EVs) represent promising technologies for enhancing the efficiency and sustainability of last-mile delivery services. This paper focuses on the optimization of customer deliveries through the integration of a plug-in hybrid electric vehicle (PHEV) and a drone. Our model, named the plug-in hybrid electric vehicle traveling-salesman problem with drone (PHEVTSPD), assumes the PHEV can be recharged, either fully or partially, at charging stations, while the drone can be launched or retrieved from the EV. Both the EV and drone are capable of independently serving the customer. In comparison with traditional truck-only or drone-only delivery models, the hybrid EV–drone model overcomes the limitations of drone payload capacity and EV service area, thereby significantly improving delivery efficiency and reducing greenhouse-gas emissions. This research presents a three-index mixed-integer linear program (MILP) formulation of PHEVTSPD. Additionally, a linear or piecewise linear approximation of the concave time–state-of-charge (SoC) function is adopted in the model. To solve the proposed problem, we introduce an adaptive large-neighborhood search (ALNS) metaheuristic. Numerical analysis results reveal that the proposed ALNS method outperforms variable neighborhood search (VNS) with an average optimality gap of approximately 3% when solving instances with 10 nodes. Furthermore, a piecewise linear function with a six-line-segment approximation demonstrates an average of 10.8% lower cost compared with a linear approximation.
In the United States, the transportation sector generates 28% of the national greenhouse-gas emissions ( 1 ). Many local governments and corporate policies aim to promote transportation modes with lower pollution and greenhouse-gas emissions. Electric vehicles (EVs) are an emerging alternative to internal combustion engines, and several companies have started using them in their operations. For example, in 2018, FedEx announced a fleet expansion and added 1000 electric delivery vehicles to operate commercial and residential pickups and delivery services in the United States ( 2 ). Switching to electric fleets not only has long-term effects on mitigating the impact of climate change but may also have immediate financial benefits, as fuel cost accounts for 39% to 60% of operating costs in the trucking sector ( 3 ). Compared with conventional internal combustion engines and petroleum-fuel-powered vehicles, EVs are much more energy-efficient and require less maintenance, which indicates potential savings to freight and logistics companies ( 4 , 5 ). Another new trend in recent years is the integration of unmanned aerial vehicles (UAVs), or drones, into e-commerce and on-demand item delivery. Amazon, Google, and DHL announced plans to use UAVs to deliver small packages. The past few years have witnessed a dramatic increase in UAV applications ( 6 ). According to Teal Group’s prediction, commercial use of UAVs will grow eightfold over the decade to reach U.S. $7.3 billion in 2027 ( 7 ). For simplicity, for the rest of the paper, the terms “UAV” and “drone” are used interchangeably.
While EVs and drones exhibit considerable potential for last-mile delivery services, they are not without their limitations. Despite recent strides in battery technology allowing private electric vehicles and trucks to achieve a driving range of 300 to 400 mi per charge, the practical driving range for EVs dedicated to commercial use, such as delivery vans, hovers around 150 mi in real-world scenarios ( 8 ). Consequently, en-route charging becomes a necessity, particularly when navigating suburban or rural areas or executing cross-town routes. Simultaneously, the application of drones faces a significant constraint in their payload capacity, notably for flat-wing drones commonly deployed in delivery operations. For instance, drones utilized in Amazon Prime Air typically carry payloads of around 5 lb ( 9 ).
In response to these challenges, this paper introduces a hybrid EV–drone delivery model designed to overcome the aforementioned drawbacks. Similar to the traveling-salesman problem with drone (TSPD) proposed in Murray and Chu ( 10 ) and Agatz et al. ( 11 ), this model pairs an EV with a drone for efficient delivery tasks. In contrast to traditional truck-only or drone-only delivery approaches, the hybrid EV–drone model adeptly overcomes the restricted payload capacity of drones and the limited service area of EVs, substantially enhancing delivery efficiency and mitigating greenhouse-gas emissions. Notably, both the EV and the drone operate independently to serve customers while the EV serves as a drone hub, facilitating the recharge and launch/retrieval of the drone. This setup allows the drone to be deployed multiple times en route, reaching hard-to-access customers by flying directly without being hindered by ground congestion. The battery energy can be replenished en route at charging stations within the network. This novel problem is termed the plug-in hybrid electric vehicle traveling-salesman problem with drone, or PHEVTSPD.
This article is based on Chapter 4 of the author’s PhD thesis ( 12 ) and technical report ( 13 ) and is an extension of Zhu et al. ( 14 ). Specifically, the main contributions of this paper are:
Integration of EV and drone routing: The proposed problem, PHEVTSPD, is one of the few pieces of research that address the EV routing problem and drone routing problem simultaneously, providing a comprehensive framework for optimizing hybrid transportation systems.
Partial recharge with nonlinear state-of-charge (SoC) function: PHEVTSPD considers partial recharge of EVs, incorporating a nonlinear concave time–SoC function. This function models the relationship between charging time and energy charge amount using a piecewise linear approximation, similar to Montoya et al. ( 15 ).
MILP formulation: A mixed-integer linear programming (MILP) formulation for the PHEVTSPD, defined in an augmented network, is proposed. This formulation captures the complexity of both vehicle and drone routing, as well as the charging dynamics of EVs.
Adaptive large-neighborhood search (ALNS): A specially designed ALNS method, which incorporates constraint-programming (CP) modeling as a subproblem, is presented. Test results indicate that this approach is more efficient than the variable neighborhood search (VNS) method, which is widely used to solve the TSPD.
Real-world case study: A real-world case study based on the downtown Austin network demonstrates that the final completion time increases with the accuracy of the piecewise linear approximation. This highlights the practical applicability and effectiveness of the proposed methods in realistic scenarios.
The rest of the paper is organized as follows. The next section presents the literature review. The MILP formulation for PHEVTSPD is described after that, followed by the proposed ALNS method. The subsequent section compares the computational performance of the MILP formulation and ALNS algorithm; it also includes sensitivity analysis of several key parameters. The final section presents the conclusion and potential future research directions.
Literature Review
The vehicle routing problem (VRP) and the traveling-salesman problem (TSP), first proposed by Dantzig and Ramser ( 16 ), are among the most well-studied optimization problems in operations research. Researchers have considered many VRP and TSP variants—incorporating service time windows, capacities, maximum route lengths, distinguishing pickups and deliveries, fleet inhomogeneities, and so forth. Various exact and heuristic methods have been proposed to solve the problem ( 17 – 21 ). References ( 22 – 27 ) and ( 28 ) provides a thorough literature review of VRP variants and solution-algorithm families.
Erdoğan and Miller-Hooks ( 29 ) introduced the green VRP (G-VRP), in which the goal is to route a fleet of alternative-fueled vehicles (AFV) to serve a set of customers within a time limit while respecting the driving range of the vehicles. Conrad and Figliozzi ( 30 ) developed the recharging VRP in which vehicles can recharge at particular customer locations while considering customer time windows and fleet capacity constraints. Schneider et al. ( 31 ) also modeled customer time windows and fleet capacity constraints in the electric VRP (E-VRP) problem while making the recharging times dependent on the remaining charge levels. Montoya et al. ( 15 ) extended the previous E-VRP models to consider nonlinear charging functions using piecewise linear approximations. The solution methods for E-VRP variants are diverse and range from exact methods such as branch and bound, branch and cut ( 32 ), and branch and price ( 31 , 33 ) to heuristic methods such as the modified savings method of Clarke and Wright with density-based clustering ( 29 ), local improvement based on neighborhood swap ( 31 , 34 ), and metaheuristics such as simulated annealing and tabu search ( 35 – 37 ). Pelletier et al. ( 38 ) and Erdelić and Carić ( 39 ) provide a comprehensive survey of the different E-VRP variants and associated solution algorithms. Unlike the research mentioned above, this paper focuses on the traveling-salesman variant. Doppstadt et al. ( 40 ) formulated the TSP for hybrid EVs considering four modes of operation—combustion, electric, charging, and boost. An iterated tabu search with local search operators, which switch route structure and operating modes, was used to solve real-world instances. Doppstadt et al. ( 41 ) extend Doppstadt et al.’s model ( 40 ) by considering customer time windows and proposing a new VNS-based solution method. Liao et al. ( 42 ) provided an efficient dynamic-programming-based polynomial-time algorithm for the EV shortest-travel-time path problem and approximation algorithms for the PHEV touring problems. The algorithms incorporated battery capacity constraints and battery swaps. Roberti and Wen ( 43 ) developed a MILP formulation for the EV TSP problem with time windows for both full- and partial-recharge policies. While there has been a significant amount of work on E-VRP and TSP, except for Zhu et al. ( 14 ), this has yet to consider an integrated delivery system with drones.
Meanwhile, many studies have investigated the efficiency of delivery systems that deploy UAVs. Otto et al. ( 44 ) provides a detailed review of the various civil applications of drones in domains such as agriculture, monitoring, transport, security, and so forth. Murray and Chu ( 10 ) introduced the flying-sidekick TSP (FSTSP), which assumes that a truck can launch its UAV at the depot or customer node and remain on its route. At the same time, the UAV delivers one small parcel to another customer before meeting again at a rendezvous location (another customer node on the truck’s route). Murray and Chu ( 10 ) proposed a two-stage route and reassigned heuristic wherein the first stage, a truck TSP tour that visits all customers, is determined. In the second stage, selected customers are reassigned to the UAV based on cost savings. Murray and Chu ( 10 ) also introduced the parallel-drone-scheduling TSP (PDSTSP), in which multiple drones and a truck originating from a depot serve a set of customers. Mbiadou Saleu et al. ( 45 ) developed an iterative two-stage heuristic involving customer partitioning and routing optimization for the PDSTSP. Agatz et al. ( 11 ) presented an integer programming formulation for a variant of FSTSP called TSPD and a “route-first, cluster-second” heuristic. Ha et al. ( 46 ) studied a variant of Murray and Chu ( 10 ) to minimize operating- and waiting-time costs rather than completion time. The authors propose two heuristics—a modification of Murray and Chu’s ( 10 ) heuristic to minimize costs and greedy randomized adaptive-search procedure (GRASP). Yurek and Ozmutlu ( 47 ) developed an iterative two-stage algorithm to solve the FSTSP of Murray and Chu ( 10 ), which was referred to as TSPD. The truck and drone routes are determined sequentially in two stages. Bouman et al. ( 48 ) modified the Bellman–Held–Karp dynamic-programming algorithm for the TSP to develop an exact solution approach for TSPD, whereas Poikonen et al. ( 49 ) used a branch-and-bound method. De Freitas and Penna ( 50 , 51 ) developed a randomized variable neighborhood descent heuristic, which modified an initial TSP solution obtained from the Concorde solver to solve the FSTSP. Boysen et al. ( 52 ) focused on scheduling single and multiple drone deliveries launched from a truck with a fixed route. Jeong et al. ( 53 ) modified Murray and Chu’s model ( 10 ) to include the impact of payload on energy consumption and no-fly zones and proposed a two-stage construction and search heuristic. Dayarian et al. ( 54 ) focused on a new variant in which drones are used to resupply a truck making deliveries. Kim and Moon ( 55 ) studied a variant termed traveling-salesman problem with drone station (TSPDS), in which a truck is used to resupply a drone station, which is different from a depot. Multiple drones then make deliveries to customers from drone stations. The truck will also make deliveries to customers after supplying the drone station. A two-phase solution algorithm is developed to solve the problem. Roberti and Ruthmair ( 56 ) proposed a compact mixed-integer programming formulation for TSPD and discussed how this formulation could be extended to address some common additional side constraints. In addition, it presented an exact branch-and-price algorithm in which the subproblem is solved using a dynamic-programming approach. More recently, Freitas et al. ( 57 ) proposed another mixed-integer programming formulation and general VNS metaheuristic for the same problem.
While there has been a significant body of work on integrating drones into existing routing frameworks since 2015, none consider EVs and their associated range constraints. Recently, the authors studied a similar problem in the context of battery EVs and drones ( 14 ). In Zhu et al. ( 14 ), we assume batteries are swapped and do not consider partial charging. Moreover, the ALNS heuristic developed in this current research outperforms the VNS metaheuristic developed in Zhu et al. ( 14 ). In addition, this paper also assumes a nonlinear relationship between the amount of energy charged and charging time, which significantly increases the problem’s difficulty but also indicates that the proposed model has great potential to be used in a real-world application.
Problem Description and Formulations
In the PHEVTSPD, a logistics company aims to deliver a specified number of packages to customers using a single PHEV paired with a commercial drone. In this context, The PHEV is assumed to be a small electric van specifically designed for delivery tasks, with a battery size similar to the van built by Alke, an Italian company), specifically designed for delivery tasks. Each customer is to be served exactly once by either the PHEV or the drone. The objective is to determine a coordinated route for the PHEV and the drone that minimizes the total route completion time.
Additional operational and energy assumptions for the proposed problem are summarized below:
Initially, both the PHEV and the drone are located at the depot, with the PHEV fully charged.
Both the PHEV and the drone travel at constant speeds within the network, and altitude differences are ignored.
Similar to the TSPD, the PHEV acts as a drone hub, launching the drone at customer node
The proposed problem does not explicitly model customer service time, for simplicity, although service time can be incorporated as arc-traversing time.
As the PHEV traverses an arc in the network, its energy decreases at a known constant rate. The PHEV can recharge its battery at charging stations during operations. The amount of energy recharged and the charging time are decision variables.
The PHEV’s battery can also recharge the drone when it is onboard, implying that drone charging time is not separately considered. This is mainly because the energy consumption of the drone sortie is known before it is launched, so the drone does not need to be fully charged as long as it has enough energy to finish the sortie. With the drone sortie, the remaining energy of the PHEV’s battery decreases proportionally. The ratio of decreased PHEV battery energy and drone consumed energy is denoted
Figure 1 illustrates a coordinated PHEV–drone route. Compared with the TSPD or the FSTSP with Drones (FSTSPD), the proposed problem follows a similar operational pattern but substitutes a conventional truck with a PHEV. A key difference is that the PHEV can recharge its battery at charging stations. Furthermore, the shared energy assumption implies that the PHEV and drone must coordinate not only operationally but also for energy management. The authors believe this assumption addresses the practical issue of the drone’s limited power supply and enhances the realism of the proposed problem scenario.
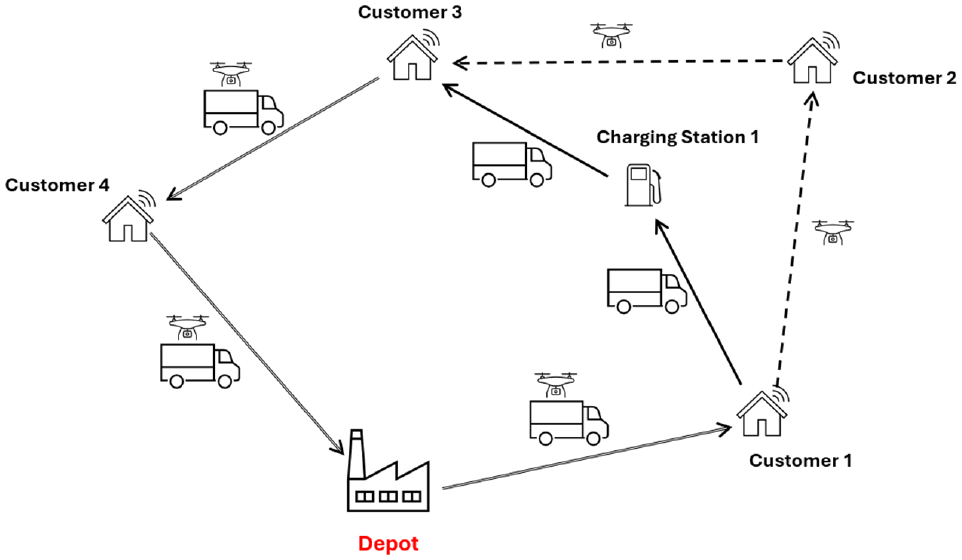
A plug-in hybrid electric vehicle (PHEV)–drone coordinated route.
For the rest of the section, we introduce a MILP model and then explain how to consider partial charge and incorporate nonlinear time–SoC functions.
MILP Model for PHEVTSPD
The proposed model extends the formulation proposed in Murray and Chu (
10
). The original network is a directed, connected graph
To permit multiple visits to the charging-station nodes while requiring exactly one visit to the customer nodes, the original network
The sets used in the model are:
A summary of parameters is given below:
The decision variables are listed below:





The objective (1) is to minimize the operational time. Constraints 2 to 11 are associated with the routing of the two vehicles. Constraint 2 guarantees that each customer node is visited once by either the PHEV or the drone. Constraint 3 and 4 state that the PHEV must start from and return to the depot. Constraint 5 is a sub-tour elimination constraint for the PHEV. Constraint 6 indicates that if the PHEV visits node





Constraints 12 to 17 are associated with the battery energy level. In particular, Constraint 12 states that if the PHEV traverses arc



Constraints 18 to 26 are associated with the travel time of the two vehicles. In particular, Constraints 18 to 21 ensure that the travel time and drone range limit are correctly handled. To be more specific, if drone sortie



Constraints 27 to 30 are associated with ordering the two vehicles. Constraint 27 ensures that the drone route should be within the drone’s flight range. Constraint 28 is a sub-tour elimination constraint, and Constraint 29 ensures the correct ordering of two different nodes. Constraint 30 indicates that if there exist two drone route deliveries








The proposed formulation is also capable of accommodating common side constraints, which are discussed in detail in the Appendix. We acknowledge the existence of various models addressing the TSPD, which are similar to PHEVTSPD. Examples include the two-index formulation originally proposed by Roberti and Ruthmair ( 56 ), the formulation by Luo et al. ( 58 ), and the one proposed in Freitas et al. ( 57 ). Although these MILP models are efficient, they do not apply to our problem because these models do not model the energy balance at the charging-station nodes explicitly since there are no charging-station nodes involved.
Modeling Partial-Recharge Policies
In the literature related to EV routing, a full recharge assumption is commonly adopted because of its simplicity—for example, Schneider et al. ( 31 ). This assumption is also valid when the EV is assumed to be a battery-swappable EV, where its battery can be exchanged for a fully charged one at battery swapping stations ( 14 , 59 ).
However, full recharge can be time-consuming, depending on the SoC level, available charging technology, and battery capacity. In time-sensitive routing scenarios, such as logistics companies aiming to deliver parcels within specific time constraints, a full-charge policy might yield suboptimal solutions. For instance, if the PHEV visits a charging station near the end of its route, it does not need a full charge to return to the depot. This situation also arises when the PHEV visits consecutive charging stations, where full charging is unnecessary for the journey to the next station. Additionally, in respect of vehicle maintenance, deep charge/discharge cycles are detrimental to the lifespan of lithium batteries, which are commonly used in EVs, and significantly accelerate battery degradation ( 60 ). Research indicates that a complete charge/discharge cycle hastens battery capacity fading and reduces the number of dynamic-stress-test cycles, as shown in Figure 2.
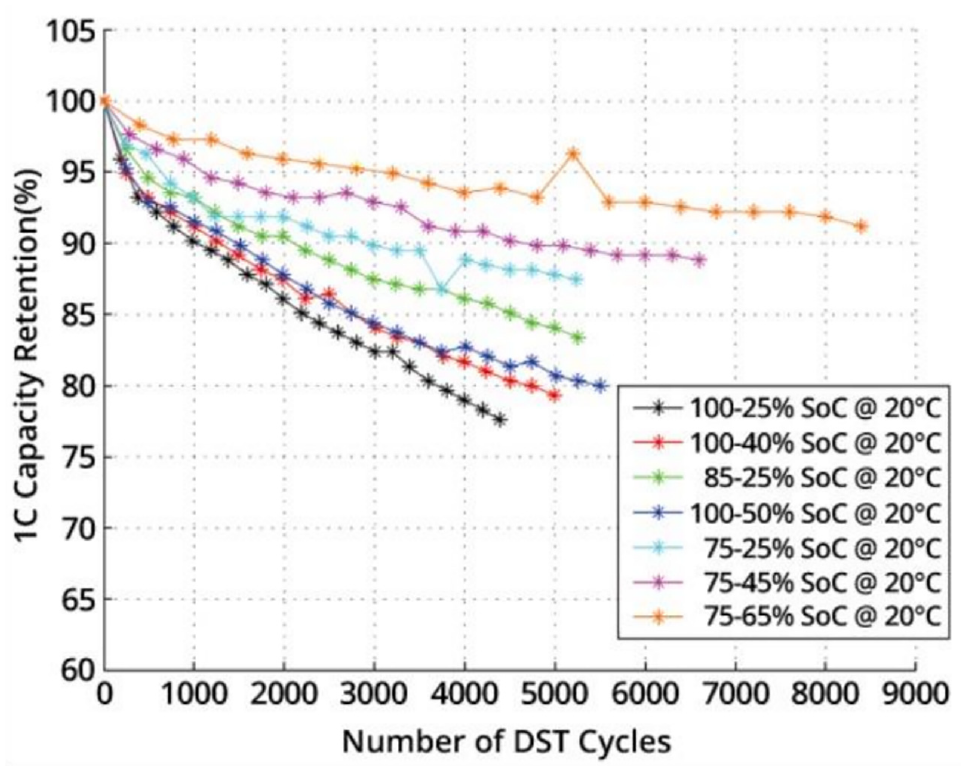
Battery capacity for dynamic-stress-test cycles.
Given these drawbacks of full recharge, partial recharge, where the battery is charged only enough to complete the route, is often preferable in real-world applications. Notable research adopting this assumption includes Montoya et al. ( 15 ), Desaulniers et al. ( 61 ), Bruglieri et al. ( 62 ), and Froger et al. ( 63 ). Surveys on the E-VRP, its variants, and different charging strategies are provided by Erdelić and Carić ( 39 ) and more recently by Abid et al. ( 64 ).
In the proposed problem, we adopt a partial-recharge assumption with a nonlinear time–SoC function. We assume that the charging stations are connected to a plug-in electric grid, and the PHEV can be charged with any amount of energy at CS nodes. Both the amount of energy charged and the charging time, which depends on the initial SoC level and the amount of energy charged, are decision variables.
In the plug-in charging stations, the actual plug-in time–SoC curve is a nonlinear concave function, as shown in Figure 3. In the figure,
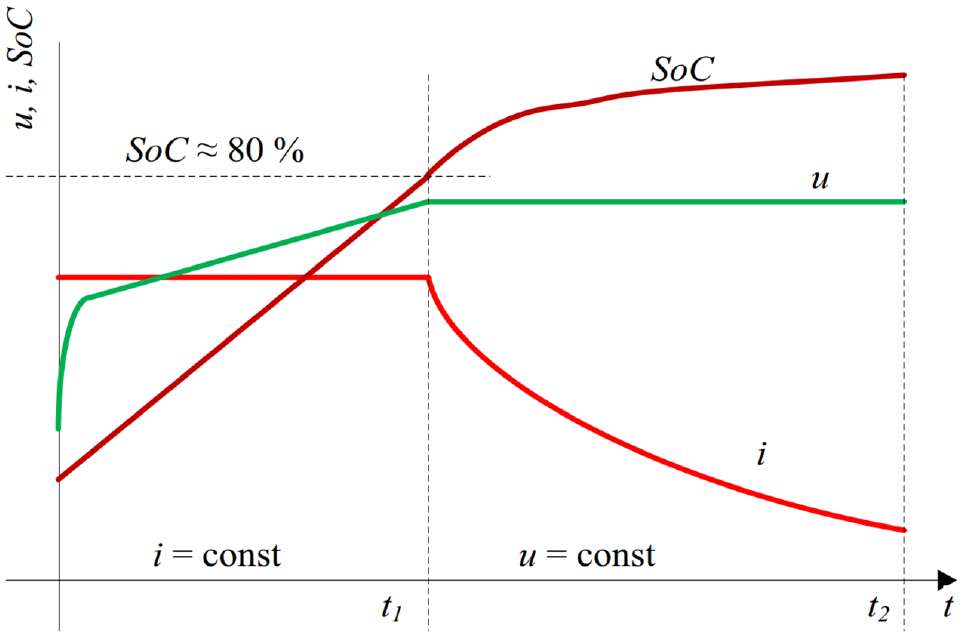
A typical charging curve.
In the field of EV routing that adopts a partial-recharge policy, a common strategy assumes a linear relationship between charging time and the charged amount. Research such as that in (
35
,
37
,
62
,
66
,
67
) often uses a conservative estimate of the actual time–SoC function, ensuring that for any charging time
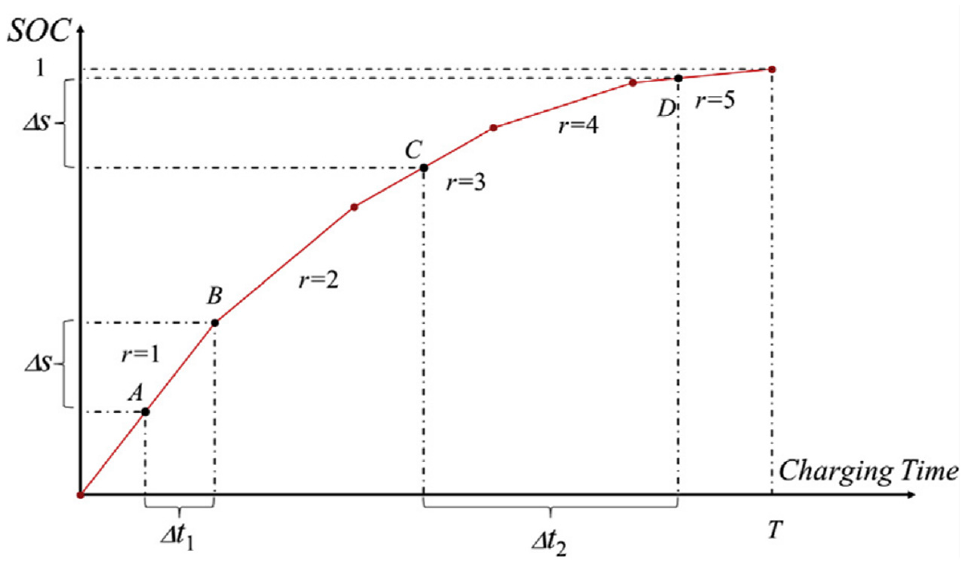
One major drawback of the linear approximation of the time–SoC function is its accuracy. The relationship between the amount of charged energy and the charging time is not linear; it depends on the initial time–SoC level before charging, as depicted in Figure 4. Montoya et al. (
15
) were the first to model the concave time–SoC function using a piecewise linear function. This approach is more precise than the linear counterpart, as shown in Figure 5, where
Relationship between charged time and charged energy amount.
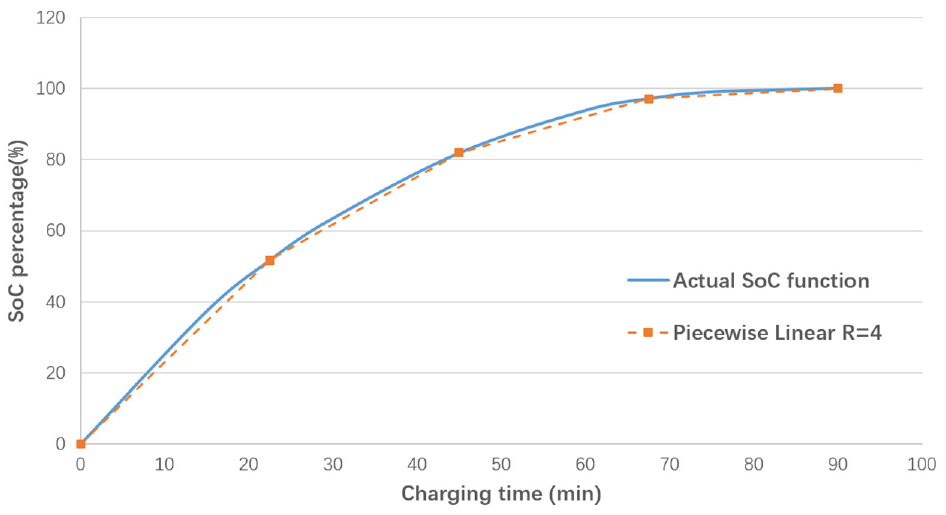
Actual time–SoC function and piecewise linear function approximation with
To deploy this technique, some necessary changes in the notations are:
For the new notation, all the energy values are now represented as their ratio to the PHEV battery energy capacity. Let

Let

Note that in our MILP formulation

Equation 41 models the relationship between



where Constraints 42 and 43 ensure that if


With a new reformulation and the introduction of new auxiliary variables
ALNS Solution Method
This section proposes a metaheuristic solution method for PHEVTSPD. In the past, multiple researchers have shown that VNS produces some of the best results when solving TSPD (
51
,
69
). However, when applying the neighborhood structures to a feasible solution
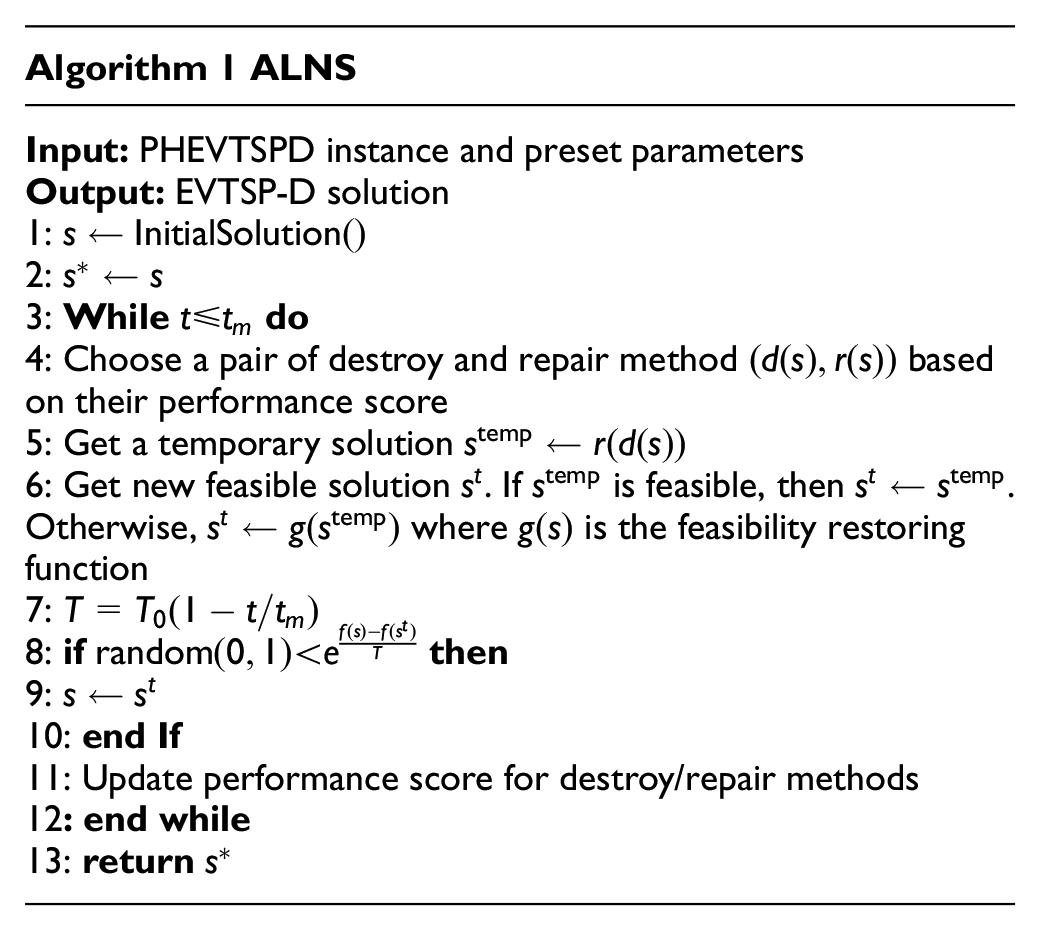
Overview of ALNS
Typically, in LNS, two kinds of operators exist: destroy methods and repair methods. The destroy method aims to “destroy” the current solution by eliminating a target number of nodes and the repair method tries to restore a feasible solution. In ALNS, both methods are chosen based on their performance score, with the roulette-wheel selection rule. Denote

After each iteration,

In the formula,
We also control the acceptance probability of a new solution with a global time-varying parameter

where

where
Initial Solution
The modified Clarke–Wright savings algorithm (MCWS), a greedy maximum-saving algorithm proposed in Erdoğan and Miller-Hooks ( 29 ), is used to construct a PHEV route that satisfies the battery constraint. The resulting initial solution has all the customers served by the PHEV and has no drone sorties.
Removal Methods
In each iteration, the removal operator removes some customer nodes from the current solution
Repair Methods
In each iteration, with a given partial solution
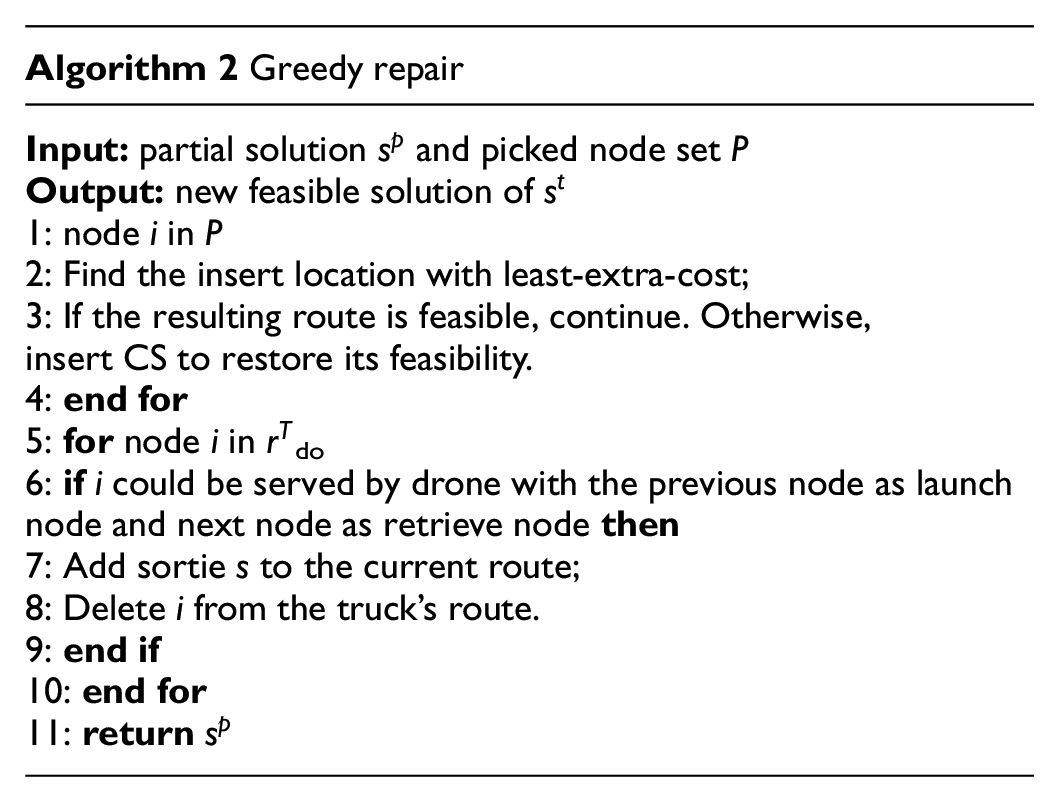
Greedy Repair
The greedy repair method is the “cheapest” of all three repair methods. In the first phase, the feasible routes are constructed by inserting all the nodes in
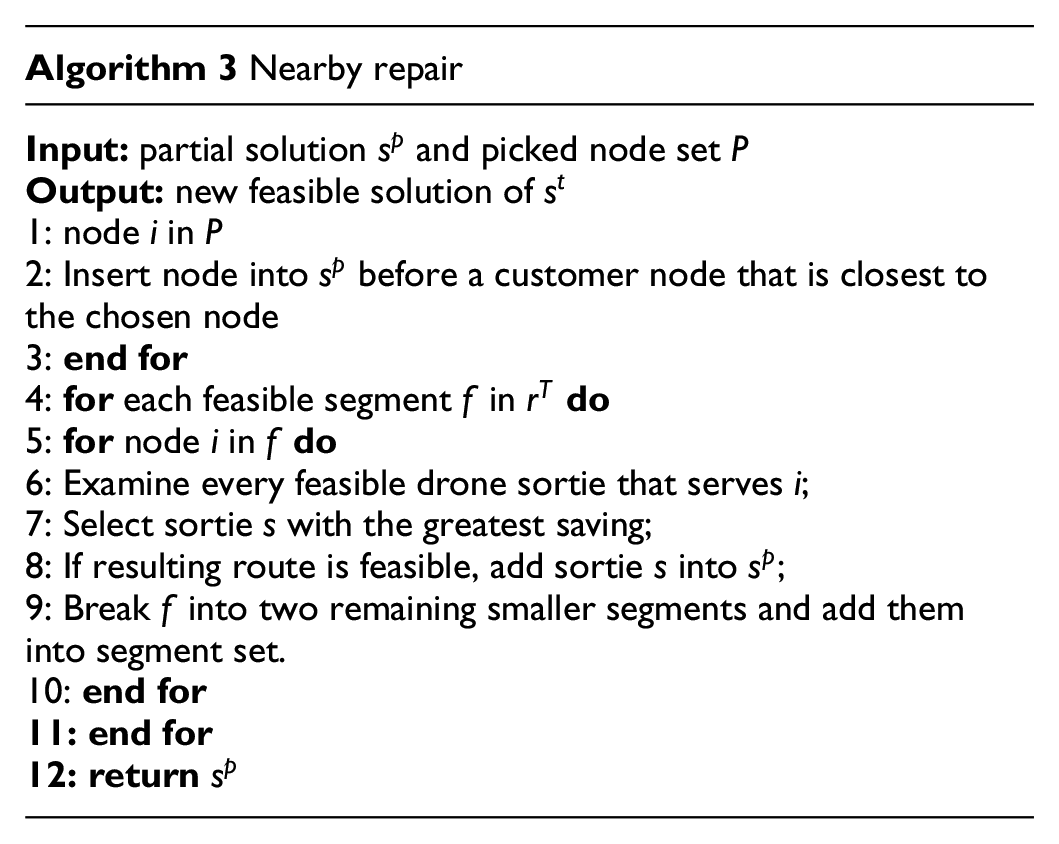
Nearby Repair
The first phase of the nearby repair is similar to that of the greedy repair. In the second phase, the nearby repair aims to explore all possible drone sorties (by exploring different launch and retrieve nodes) and pick the sortie with the largest time-savings. This process is repeated until there is no potential drone sortie with positive time-saving. The detailed procedure of the nearby repair is shown in Algorithm 3.
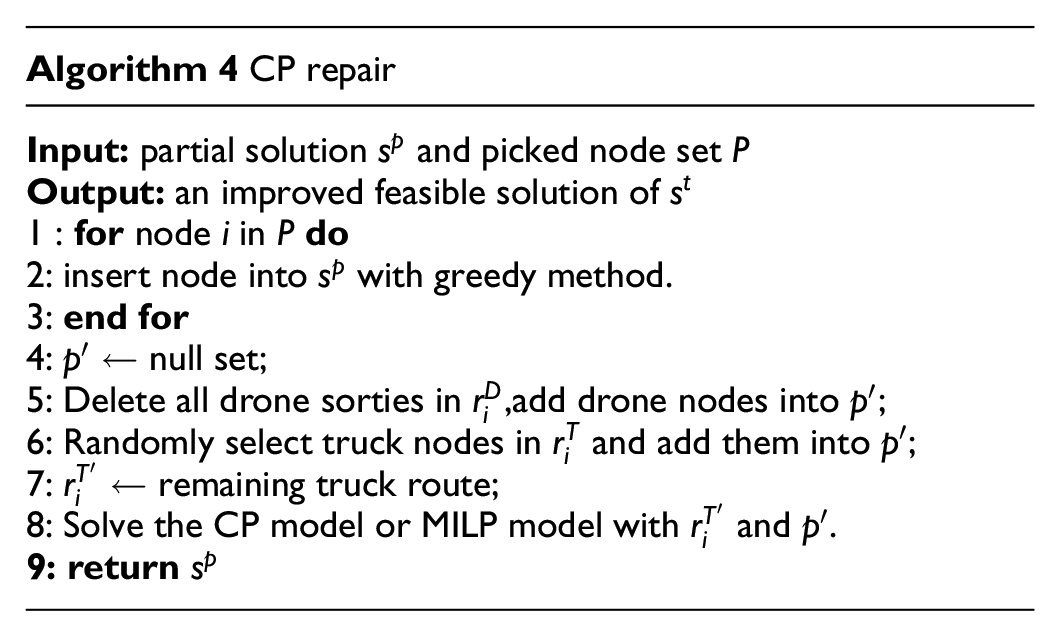
CP Repair
Constraint programming is a paradigm for solving combinatorial problems by logically expressing the constraints. This method is specifically to derive a feasible solution and has been widely used in tackling schedule-related problems. In the community of vehicle routing, especially drone-related vehicle routing, CP has been proven to be an effective method for obtaining solutions of good quality—for example, Montemanni and Dell’Amico ( 74 , 75 ) and Ham ( 76 ). In this section, it is an essential part of the algorithm to get a feasible complete solution from the partial solution. The CP repair method is the most computationally demanding of all three techniques. It will eliminate all these existing drone sorties and re-insert these customer nodes into the partial solution, by solving a CP scheduling problem with the CPLEX CP optimizer. The CP repair method is described in Algorithm 4. A detailed description of the CP method and its equivalent MILP formulation, which is first proposed in Yurek and Ozmutlu ( 47 ) are shown in the Appendix ( 74 – 76 ).
Feasibility-Resorting Function and Cost-Evaluation Function
At each iteration, after the removal methods and repair methods are applied to the current solution
The feasibility-resorting function
Computational Experiments
This section compares the performance of ALNS and VNS, and the computational efficiency and accuracy of ALNS are tested against a commercial solver. A sensitivity analysis of the number of line segments used in the time–SoC function approximation process is also performed.
Experimental Setting
Although publicly available instances of the TSPD exist, converting these instances into those suitable for PHEVTSPD proves challenging. As a result, numerical analyses are conducted on randomly generated instances. For each instance, the numbers of customers and charging stations are specified beforehand. Then, the coordinates of customers and charging stations are randomly generated within a 40 km × 40 km square, while the depot is always located at the center of the square. The distance matrix for the PHEV employs the Manhattan metric, while the Euclidean metric is applied to the drone, assuming that the drone can fly directly between two nodes in the network. Each instance is treated as an electric vehicle traveling-salesman problem (EVTSP) and the MCWS algorithm applied before it is chosen to ensure its feasibility. In this study, the PHEV is assumed to have a similar battery configuration as the Alke ATX340E, and the drone is the DJI MATRICE 600 PRO. A summary of configurations of the PHEV and drone is shown in Table 1; these are primarily derived from the companies’ official websites ( 77 , 78 ).
List of Default Parameters Used in Tests
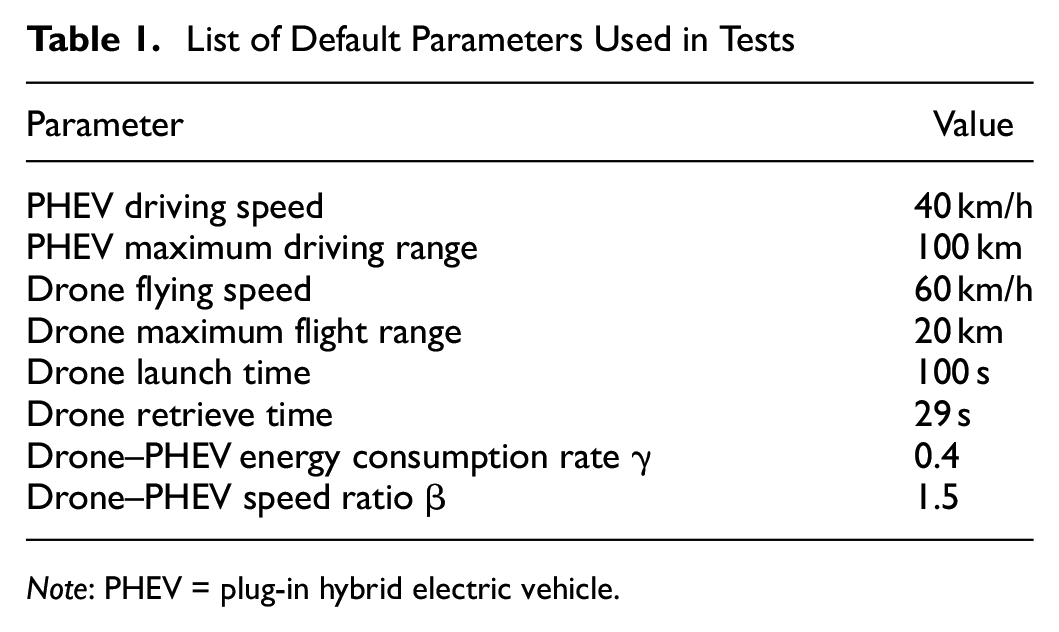
Note: PHEV = plug-in hybrid electric vehicle.
The proposed MILP formulation is implemented in Pyomo and solved using ILOG’s CPLEX Concert Technology solver (version 12.6.3). Simultaneously, the ALNS algorithm is coded in Python. The CP repair method is solved with the CPLEX CP optimizer (version 12.6.3). All experiments are conducted on a 3.6 GHz Intel Core i7 desktop with 32 GB RAM.
Estimation of the Concave Time–SoC Function
Multiple SoC charging functions of different batteries under different charging techniques exist. For example, a detailed time–SoC function provided by TeoTeslaFan in the Tesla forum is publicly available ( 79 ), which indicates that for the Tesla Model S, the battery could be fully charged in 110 min with a Tesla Supercharger. For our problem, the PHEV has a charging time of less than 90 min, according to Alke’s official website. Thus, necessary changes are made to the function posted in TeoTeslaFan (80). This concave SoC function is estimated with piecewise linear approximation with different segments, shown in Figure 6.
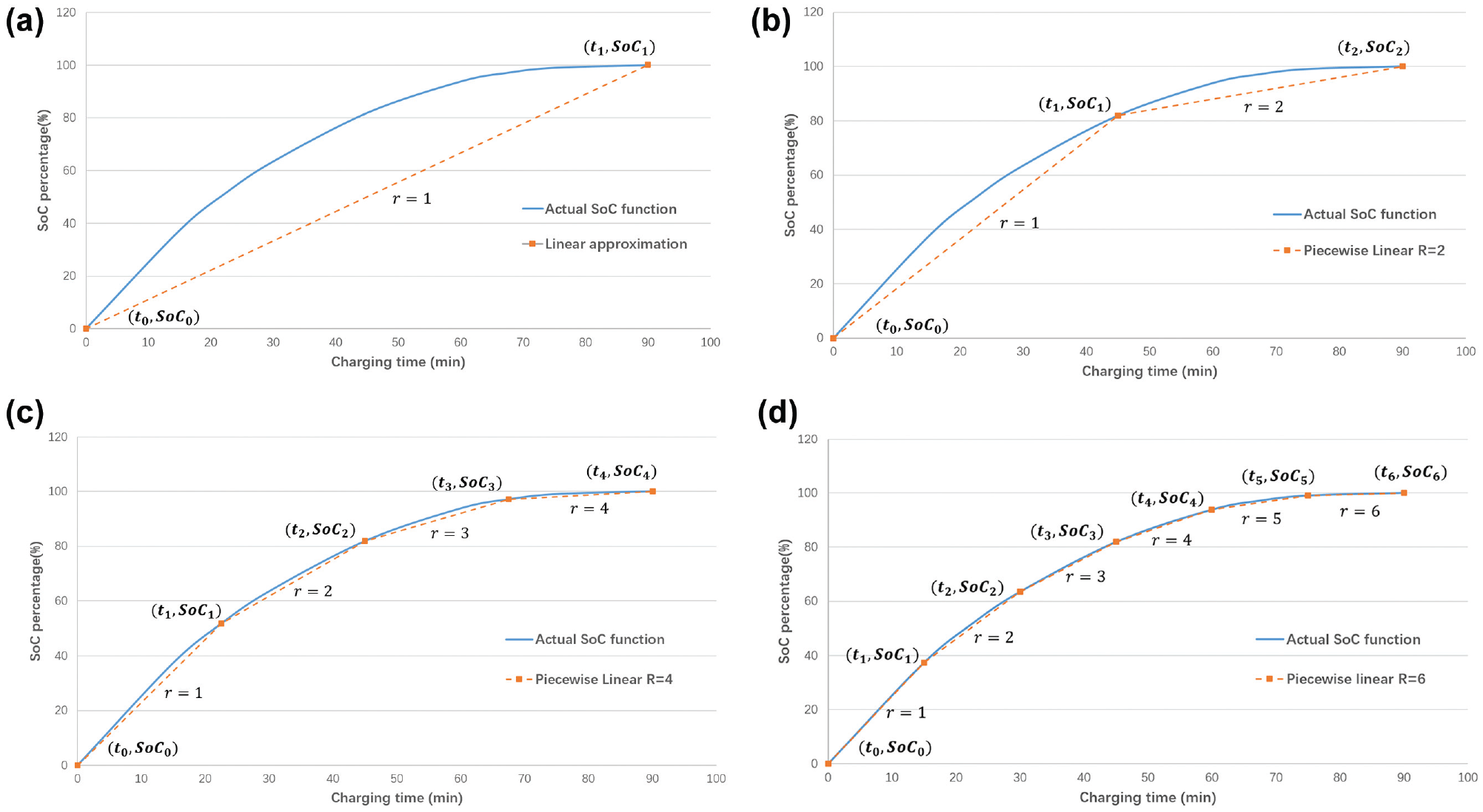
Time–SoC function and linear/piecewise linear approximation with various
Performance Comparison Between ALNS and VNS
The performance of the ALNS is compared with the VNS presented in Campuzano et al. ( 69 ). The test results are shown in Figure 7, where the displayed numbers are the average value of 20 randomly generated instances.
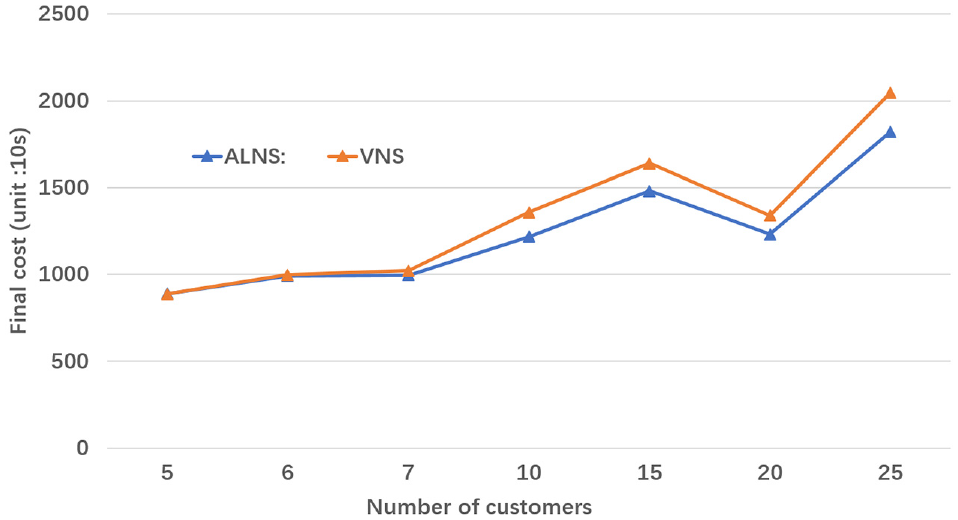
Comparison between ALNS and VNS.
As can be seen, when the size of the tested instances is small
Comparison Between MILP Formulation and ALNS Method
The performance of the ALNS is also compared with the CPLEX solver, whose results are shown in Table 2. In the table, “R1” represents the method approximating the time–SoC function with

where
Performance Comparison Between ALNS and CPLEX on Base Instances
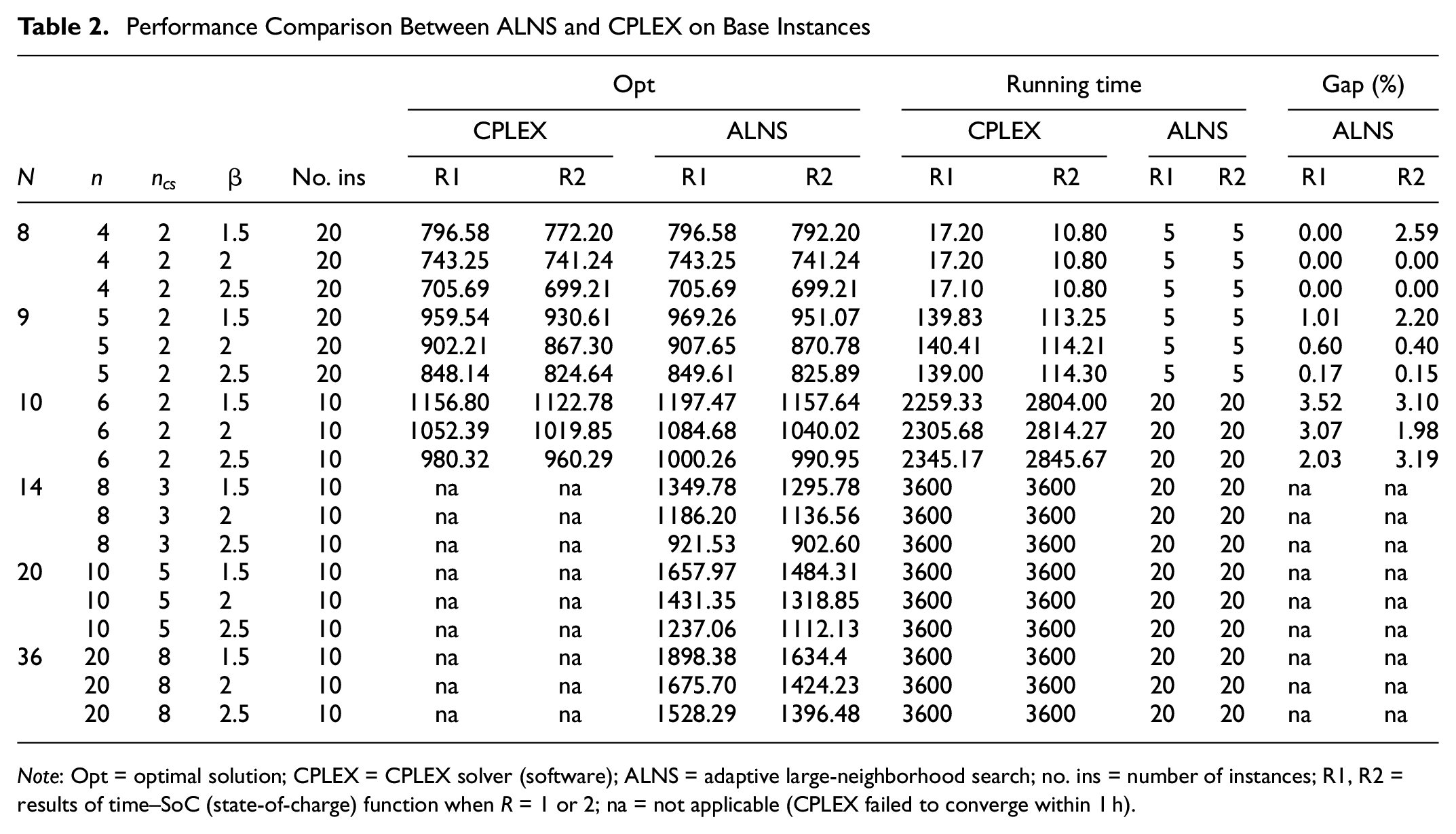
Note: Opt = optimal solution; CPLEX = CPLEX solver (software); ALNS = adaptive large-neighborhood search; no. ins = number of instances; R1, R2 = results of time–SoC (state-of-charge) function when R = 1 or 2; na = not applicable (CPLEX failed to converge within 1 h).
We also conduct additional tests on some PHEVTSPD variants described below, and the results are shown in Table 3.
MaxLeg: the problem variant that limits the number of customers per truck leg
LRT: the variant considers the launch/retrieve time
Range: the variant that assumes the drone’s flight range depends on the parcel’s weight
Loop: the variant which allows the self-loop
Performance Comparison Between ALNS and CPLEX on Instances with Side Constraints
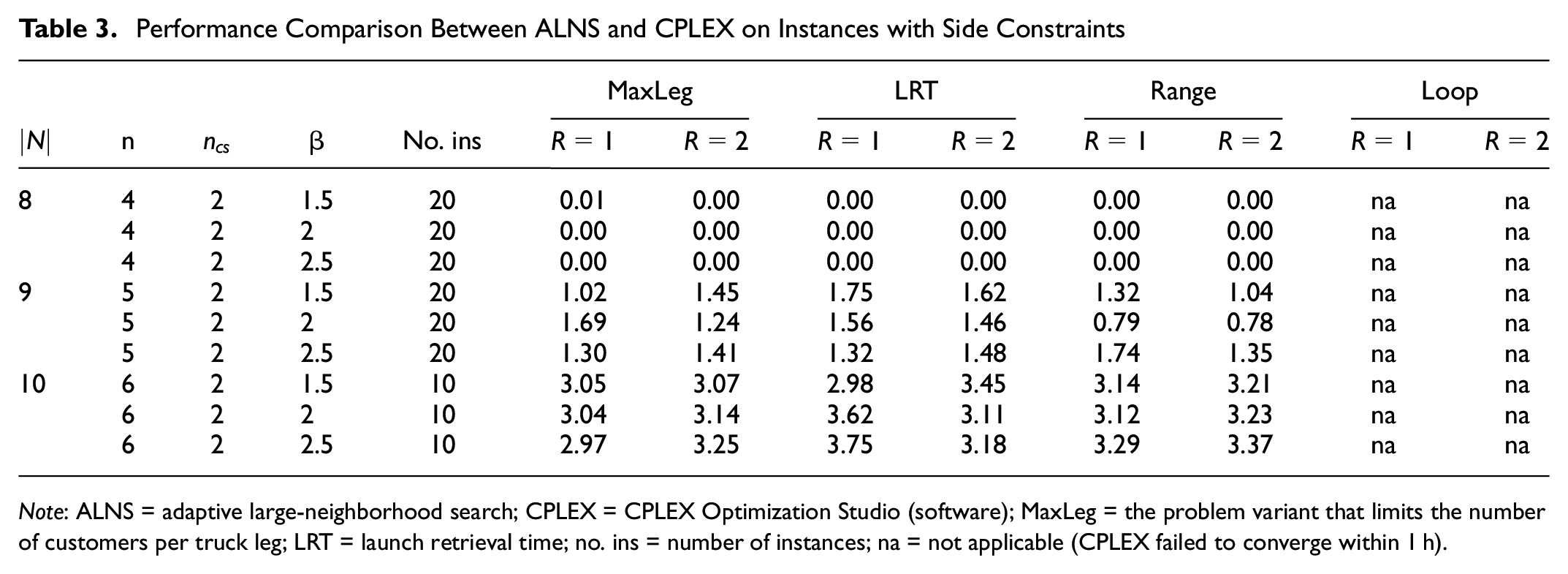
Note: ALNS = adaptive large-neighborhood search; CPLEX = CPLEX Optimization Studio (software); MaxLeg = the problem variant that limits the number of customers per truck leg; LRT = launch retrieval time; no. ins = number of instances; na = not applicable (CPLEX failed to converge within 1 h).
Table 2 highlights the performance disparities between the commercial solver and the ALNS algorithm for base cases. Notably, the commercial solver struggles to solve instances with six customers and two charging stations within a 1 h timeframe. In these instances, with an augmented network size of 10 nodes, ALNS demonstrates an average optimality gap of less than 3.5% when allotted a computational time of 5 s. To be more specific, the ALNS method obtained the optimal solution in 48 out of all the 60 instances tested with different
An insightful comparison of the final costs for PHEVTSPD instances reveals an average 7% lower cost compared with the base cases, with this margin seemingly widening as instance sizes increase. This underscores the efficacy of a piecewise linear approximation of the time–SoC function, particularly with a high
The results from Table 3 highlight similar optimality gap trends for PHEVTSPD variants as observed in the base problem. However, for the Loop variant, CPLEX fails to terminate within 1 h, even for a modest network with four customers and two charging stations.
Comparison of PHEVTSPD with Different
Values
In this subsection, we compare the final cost of PHEVTSPD with different time–SoC function approximations. The actual time–SoC function and its approximation with different
The final delivery time with different
Performance Comparison of PHEVTSPD with Different
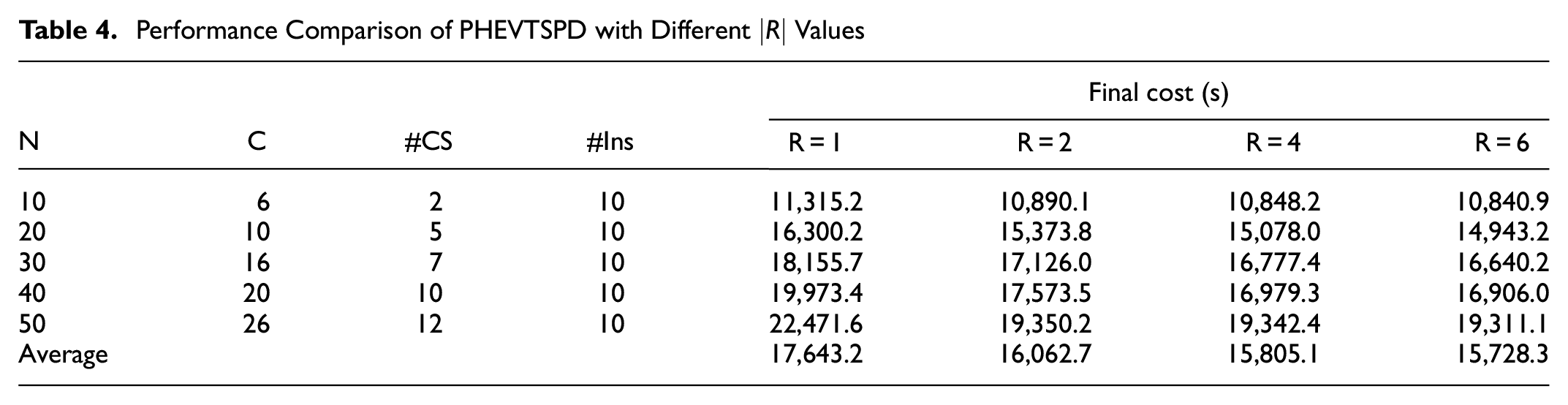
In addition, we also test the final delivery time of the downtown Austin network with various
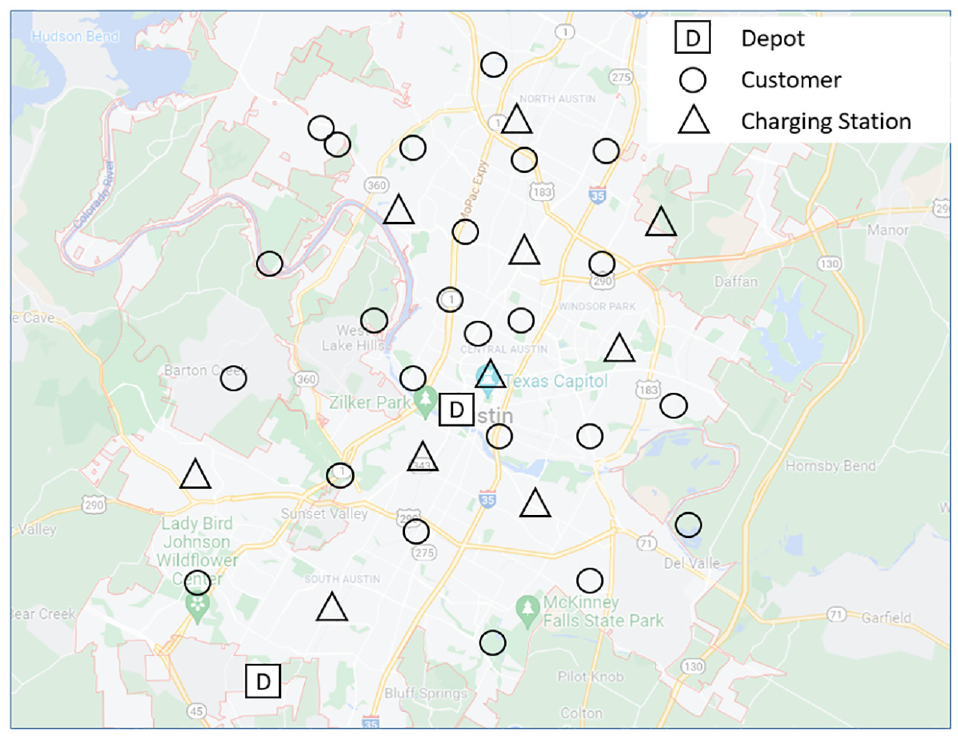
Downtown Austin network.
The sensitivity analysis is shown in Figure 9. The central-layout instance generally has less completion time than the side-layout instance. For both network layouts, the final delivery time decreases gradually as
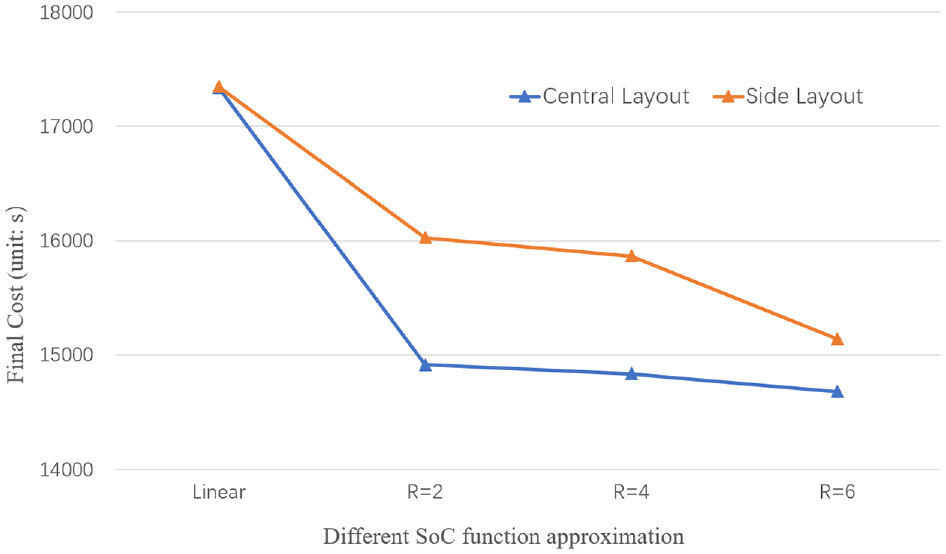
Final cost of Austin network with various
Conclusions and Future Work
This paper focuses on optimizing the cooperative routing between a PHEV and a drone for efficient deliveries to a designated set of customers. The electric vehicle can recharge at charging-station nodes with flexible energy levels, and the charging time is contingent on the SoC level. Both the charge-energy amount and charging time are treated as decision variables. To address this complex problem, a MILP formulation is proposed within an augmented network to solve PHEVTSPD.
This research utilizes a piecewise linear approximation to incorporate the nonlinear time–SoC function into the model. To tackle instances of practical sizes, a specially designed adaptive neighborhood-search metaheuristic method is introduced. Throughout the search process, the performance of each destroy and repair method is continually evaluated and updated. Additionally, a novel repair method based on CP, explicitly designed for PHEVTSPD, is proposed. The numerical analysis section conducts a comprehensive comparison between the MILP formulation, ALNS, and VNS. Results indicate that ALNS outperforms VNS when the number of nodes in the augmented network exceeds 10, with ALNS maintaining an average optimality gap of less than 3.5%. Moreover, test results with varying
This research suggests potential extensions in several directions. First, obtaining exact solutions for PHEVTSPD instances with practical sizes
Supplemental Material
sj-pdf-1-trr-10.1177_03611981241278351 – Supplemental material for Plug-In Hybrid Electric Vehicle Traveling-Salesman Problem with Drone
Supplemental material, sj-pdf-1-trr-10.1177_03611981241278351 for Plug-In Hybrid Electric Vehicle Traveling-Salesman Problem with Drone by Tengkuo Zhu, Stephen D. Boyles and Avinash Unnikrishnan in Transportation Research Record
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Tengkuo Zhu, Stephen Boyles, Avinash Unnikrishnan; data collection: Tengkuo Zhu; analysis and interpretation of results: Tengkuo Zhu, Stephen Boyles, Avinash Unnikrishnan; draft manuscript preparation: Stephen Boyles, Avinash Unnikrishnan. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is based on work supported by the National Science Foundation under Grant No. 1826230, 1562109/1562291, 1562109, 1826337, 1636154, and 1254921. This work is also supported by the Center for Advanced Multimodal Mobility Solutions and Education (CAMMSE).
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.