
Abstract
U.S. freight railroads consume in excess of 13 billion liters of diesel fuel yearly. Although efforts to improve energy efficiency and reduce emissions have made substantial progress in the last decades, the benefits are relatively incremental and will not be sufficient to realize full decarbonization. Several independent efforts are underway to develop alternative locomotive fuels and propulsion technologies designed to fit within the typical locomotive envelope. In addition to these more conventional efforts, multiple startup companies are working to develop self-propelled autonomous railcars (SPARCs) that can achieve targeted decarbonization levels while also disrupting the traditional railroad operating paradigm. SPARC operations with multiple platoon lengths, as well as a control scenario with a conventional train length of 110 railcars, were simulated on an example corridor linking a port with an inland intermodal terminal. This line was single track with short sidings on inconsistent intervals, which is typical of U.S. branch lines serving few local customers without heavy through traffic. For all traffic levels simulated, SPARCs had a much lower transit time than the conventional trains. Optimal platoon length varied between 15- and 38-vehicles per platoon depending on the traffic demand, well under North American standards of over 100 railcars per train.
Keywords
The major freight railroads in the United States together consume approximately 13 billion liters of diesel fuel each year. Although the fuel consumed by freight railroads represents less than 2% of transportation consumption of fossil fuels in the United States, emissions of CO2 and other pollutants from train operations are critical to freight rail industry efforts to minimize their environmental impact and achieve net-zero carbon status in the coming decades. Since 1980, freight railroad fuel efficiency has doubled, up to a value of 472 revenue ton-miles per gallon (182 revenue metric tonne-kilometers per liter) in 2019 ( 1 ). Additionally, the U.S. Environmental Protection Agency Tier 4 emissions standards required of all newly manufactured locomotives from 2015 onwards specify that emissions must be reduced by 80% to 90% compared with pre-2000 levels. However, the current generation of diesel-electric locomotives is insufficient to allow the U.S. freight rail industry to meet its longer-term climate and sustainability goals. Sufficient efficiency gains and reductions in emissions are likely to require impossible-to-realize refinements to the diesel combustion process, thus, shifting toward the use of different locomotive technologies and alternative energy sources may be necessary.
Spurred by the global push to reduce carbon emissions, railroads and industry suppliers have begun to explore the possibility of electrifying freight rail transportation using battery locomotives. Initial tests of battery electric locomotives in mainline service demonstrated a reduction in fuel consumption when included in a consist with conventional diesel-electric locomotives. However, current battery technology lacks the energy density required to store sufficient charge to fully electrify typical North American freight train sizes over long distances and across common route topography. A new battery deployment strategy, probably in addition to further battery technology improvements, would be needed to completely eliminate diesel-electric propulsion in this manner.
One way to improve the effectiveness of batteries for freight rail propulsion is to leverage them in combination with advances in train control technology, such as moving blocks and virtual coupling, along with increasing levels of automation in the rail industry. This emerging “TEA nexus” of train control, energy, and automation offers a pathway toward the development of potentially disruptive railway operating technologies that reimagine the use of rail infrastructure. Current long train sizes and railway network operating strategies in North America are driven by the economics of two-person crews and the efficiencies of high-horsepower diesel-electric locomotives. However, as documented through previous research, these efficiencies often come at the expense of freight shipment transit times ( 2 ). Switching to single-person crews or full automation, combined with battery hybrid, fuel cell, and/or electrification technology, and operating with either virtual or moving blocks to facilitate smaller in-train “power units” or using self-propelled autonomous railcars (SPARCs) in place of traditional locomotives, could radically alter the way railroads are operated.
Multiple startups in North America are working to develop battery-powered autonomous rail vehicles in the mold of SPARCs. Parallel systems is targeting the intermodal market, building entirely new autonomous rail vehicles with a flexible design to efficiently carry multiple container sizes. Their vehicles are not designed to interoperate with existing locomotives and railcars, but instead use a push-only bumper system to physically interface vehicles together into platoons, such that separating individual vehicles can be done quickly and autonomously ( 3 ). In contrast, Intramotev is primarily targeting the bulk commodity freight market, adding batteries, motors, and an autonomous control system to existing railcar designs. They plan to physically interface directly with the North American railcar fleet, enabling close to a drop-in replacement for existing locomotives ( 4 ). Powering smaller groups of railcars that can more dynamically combine and separate to repeatedly form and reform into different trains (or platoons) of varying sizes for different segments of their journey from origin to destination could eliminate time-consuming railcar sorting in classification yards. This may facilitate the creation of fast, direct service between many more origin–destination pairs, and make more frequent departures for existing train services economical. The latter option to increase departure frequency and reduce shipment waiting time in terminals is critical to short-haul intermodal operations that face strong transit time and cost competition from highway trucks hauling trailers and containers ( 5 ).
As a first step toward assessing the feasibility of SPARCs, this paper focuses on the potential ability of short platoons of autonomous, battery-powered rail vehicles transporting containers to improve the transit time of short-haul rail intermodal service on low-density single-track corridors connecting ports to inland terminals.
Background and Research Objectives
Singh et al. provide an overview of the upcoming challenges of deploying autonomous railway technology worldwide ( 6 ). Potential issues include a high initial investment cost, interoperability, overloading-constrained rail terminals, and needing to develop new operating plans, potentially using currently undeveloped techniques. Singh et al. also compare the technology used in autonomous road vehicles to autonomous trains, finding that the major differentiating factor is the positive train control system (or sufficiently high-level European Rail Traffic Management System) ( 6 ).
Even with these challenges, existing railroads and suppliers continue to push ahead in parallel to the SPARC-based startups. In Europe, several groups are developing autonomous train operations. SNCF, the French national railway, is currently developing autonomous freight and passenger trains with the goal of increasing network capacity and reliability while decreasing energy usage ( 7 ). SNCF is aiming to have prototypes running in 2023 and are planning to scale up their use on the national network by 2025. Deutsche Bahn and Siemens jointly developed an autonomous regional passenger train for use in the Hamburg S-Bahn ( 8 ) with the goal of increasing capacity and reducing energy consumption. The protocols used in this system may become the European automatic train operation standard.
North American locomotive vendors are also working toward full automation. New York Air Brake has developed their LEADER system to autonomously control heavy-haul iron ore trains in Australia, and they are working to adapt this technology to the North American market ( 9 ). Wabtec has improved their Trip Optimizer software to effectively control trains down to zero velocity, and railroads are working through the regulatory approvals required to apply this new technology ( 10 ). Whereas these initiatives are primarily focused on mainline train automation, further improvements and regulatory changes may enable uncrewed train operations for the entire trip from origin to destination.
Using automation may enable elimination of the two-person train crew, which would reduce the fixed cost of running a train, and therefore shift the optimal balance of train length and departure frequency toward shorter trains departing more frequently. These shorter, automated, conventional trains may also provide similar mainline operating benefits as SPARCs when compared with current conventional trains and operations. Diaz de Rivera et al. found that short trains may have lower transit times for loose carload (manifest) freight traffic than longer trains, depending on yard reliability and potential yard bypasses ( 2 ). However, this study assumed regular passing locations for long trains, and only considered short trains that were half the length of long trains. Additionally, Diaz de Rivera et al. focused on changes in potential planned connection times at classification yards, with less emphasis on initial carload shipment departure frequencies at origin, as is the focus of this paper ( 2 ).
Technology Overview
Self-propelled autonomous railcars (SPARCs) are rail vehicles, with or without lading (i.e., carried goods), capable of operating independently and autonomously, using their own traction drive system without an onboard operator. Although SPARCs could be propelled by any number of energy sources, to achieve rail decarbonization via electrification without the need for constructing overhead (catenary) traction power distribution systems, SPARCs are being developed to use battery power and charge while being loaded and unloaded at origin and destination terminals.
Some SPARCs, such as the vehicles in development by Parallel Systems, are not anticipated to be compatible with conventional rolling stock and are likely to lack the conventional knuckle couplers used in North American freight service. However, SPARCs may operate in platoons/trains with buffers or bumpers to transfer small compressive forces between vehicles (Figure 1). In either implementation, advanced sensing and control technology on board each vehicle will be necessary to maintain platoon integrity over all terrain and in all operating scenarios. Detailed intraplatoon control methodology analysis would not substantially affect the high-level capacity and performance of mainline operations, and is thus not included within the scope of this paper. Operating SPARCs in a platoon has both energy and operational benefits. First, platooning SPARCs eliminates the frontal component of aerodynamic drag for every vehicle except the first. Reducing aerodynamic drag is critical to reducing the energy required to propel SPARCs and help achieve the envisioned energy and emissions benefits of their battery-traction drive system. Because each SPARC has its own independent battery storage and traction system, minimizing traction energy consumption will help maximize the range of the available battery storage given the space and weight constraints of each SPARC. The second benefit of platooning SPARCs is to improve network efficiency by reducing average vehicle separation (and therefore increasing vehicle density). Though SPARC platoons/trains are unlikely to be as long as conventional trains, it is anticipated that they will be able to leverage their flexibility in overall platoon length (number of vehicles) to obtain an optimal trade-off between increased departure frequency of shorter platoons/trains and the increased aerodynamic and network benefits of longer platoons/trains.
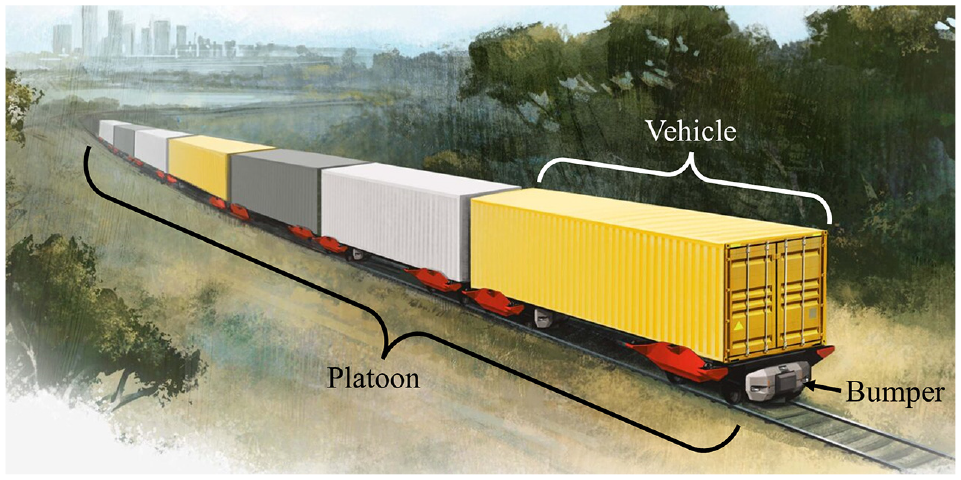
Conceptual rendering of a platoon of Parallel Systems vehicles ( 11 ).
In addition to eliminating the general crew cost for operating conventional trains on the mainline, SPARC platoons are not subject to re-crew delays or costs enroute. This allows SPARCs to economically tolerate mainline delays from other causes, such as meets and passes with other trains/platoons, without introducing large extra operating costs. Automating conventional trains also has the potential to reap the benefits of eliminating crew costs and delays, making shorter conventional trains more economical.
Depending on traffic demand, corridor configuration, and other types of traffic, SPARCs could be dispatched independently or in platoons. These platoons could be created at terminals, in a similar manner to how railcars are formed into conventional trains, or dynamically created/resized while the vehicles are enroute. In more congested corridors, SPARC platoons may follow traditional trains to minimize the incremental performance degradation of additional traffic. Since many SPARCs operate bidirectionally, and autonomous operation eliminates the need for a crew member to walk from one end of the train to the other before reversing, single-ended spur tracks off the mainline could be used for passes and overtakes without a significant increase in delay compared with traditional passing sidings (passing loops). This new operating capability over conventional crewed, locomotive-hauled trains would allow better utilization of existing track infrastructure and could reduce capital costs by cutting the required number of new signalized control points in half when upgrading dark (unsignalled) territory to operate with wayside signals or other more advanced centralized train control systems.
The lack of onboard personnel also has economic advantages for lines with sufficient levels of signalization and train control to not require operator interaction. Such lines would require remote switch machines on all spurs, sidings, crossovers, and terminal tracks that the SPARCs will use. These corridors would also require sufficient warning devices at highway–rail grade crossings such that manual flagging by a crew member is not required. In lieu of these investments, personnel could be located at strategic locations throughout the system, or shadow autonomous platoons in highway vehicles, to line turnout switches and flag crossings as necessary. Operating without onboard personnel raises other challenges such as how to initiate emergency response in the case of a derailment or grade-crossing collision, replacing “roll by” inspections of oncoming trains conducted by onboard crews, conducting manual inspections of rolling stock following an alert from a wayside defect detector, and setting out defective rolling stock mid-route. While it may be possible for some of these tasks to be handled by roving field personnel that shadow platoons in highway vehicles, technical innovation will be required to address all of the operating issues raised by crewless operations. Whereas addressing these challenges is not the specific focus of this paper, it is acknowledged that much research and development is required to prove the safety, reliability, and feasibility of the types of SPARC operations studied in this paper.
Research Questions and Hypothesis
This paper addresses two main research questions about the potential performance benefits of SPARCs when providing intermodal service on single-track railway corridors:
Does there exist an optimal platoon length to minimize average transit time from origin terminal to destination terminal on a single-track corridor?
Is the optimal platoon length sufficiently short that it does not fall within the realm of conventional locomotive-hauled trains of railcars in North America, and therefore could SPARCs provide a potential line-haul benefit relative to conventional trains?
To formulate a hypothesis, we defined our primary performance metric as transit time, which is the sum of terminal waiting time and mainline running time. Terminal waiting time is defined as the difference between intermodal shipping container arrival time at the origin terminal and platoon/train departure time. Mainline running time is defined as the time spent operating on the mainline from origin to destination, including any initial terminal departure delays (after the scheduled departure time) and any time spent waiting in passing sidings for opposing platoons or trains enroute.
For a constant traffic demand, departure frequency is inversely related to train/platoon length. Assuming poor coordination between inbound and outbound freight through a terminal, terminal dwell will decrease with increased departure frequency (and shorter trains/platoons). However, increasing the departure frequency (through shorter trains/platoons) will result in more platoons traversing a corridor at any given time. On a single-track corridor, increasing the number of platoons/trains enroute at once will increase the number of potential train conflicts, increasing the chances of train meets and associated increased runtime. Because of these two opposing effects of decreasing platoon/train length (increased runtime but reduced terminal time), it is hypothesized that the total theoretical transit time will be a convex function of departure frequency and corresponding train/platoon length (Figure 2).
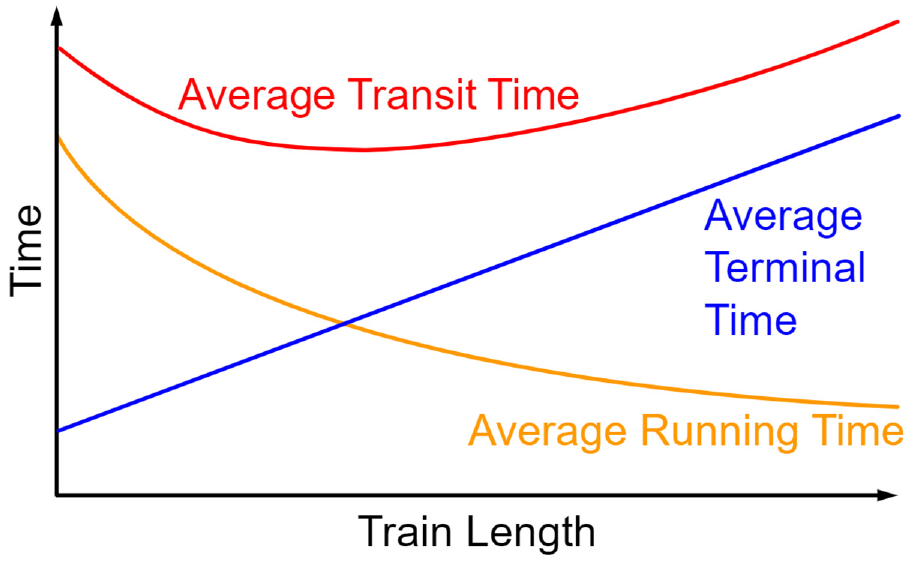
Hypothesized relationships between train/platoon length and average running, terminal and transit times.
With regard to the second research question, if the calculated optimal platoon length is too close to that of typical conventional trains, investing in SPARCs may not provide sufficient benefits over conventional train operations. For the corridor under consideration, it is hypothesized that the optimal transit time will be at a substantially smaller platoon length than that of traditional locomotive-hauled intermodal trains depending on corridor parameters such as the number, length, and spacing of passing sidings and maximum authorized train speed.
Research Contributions
The main contribution of this paper is to determine the relationship between average transit time, intermodal shipping container throughput volume, and platoon length for SPARCs modeled after Parallel Systems vehicles operating in intermodal service on a sample short-haul, single-track corridor. Although the exact results are corridor specific, the trade-offs identified between these three variables provide a framework for operational planning on other corridors. Additionally, this paper will evaluate whether this optimal platoon length is sufficiently different from typical conventional train lengths for SPARCs to potentially provide substantial benefits.
The remainder of this paper is structured as follows. The third section outlines the methodology by briefly discussing the use of simulation and underlying dispatching logic, detailing the sample corridor, and laying out the experimental design. The fourth section reviews the results of the experiment for the sample corridor. The final section summarizes the conclusions and limitations of the experiment, and poses potential future research directions.
Methodology
To evaluate potential operating strategies for SPARC platoons, previously developed generic train dispatching logic ( 12 , 13 ) was combined with the prospective characteristics of Parallel Systems autonomous rail vehicles transporting intermodal shipping containers to simulate several potential operating scenarios on a sample single-track rail corridor. Since these vehicles are not included in existing commercial rail simulation tools, the underlying dispatching logic implementation and custom corridor simulation was coded in C++, and Python was used for scenario batching and results analysis. More detailed descriptions of the vehicle parameters, the sample corridor, and the experimental design are provided in the following sections.
Simulation Parameters
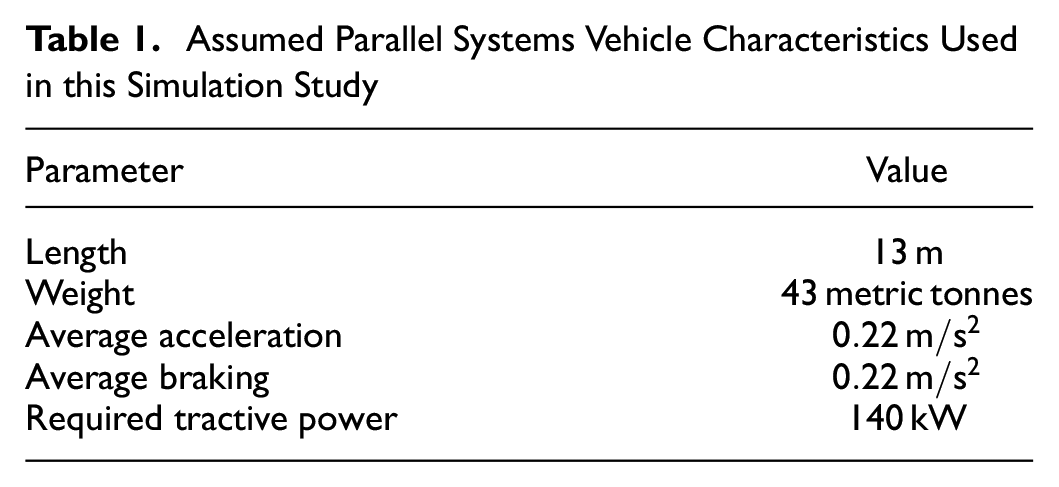
Because of the ongoing development of prototype Parallel Systems vehicles, the research team made several simplifying assumptions about exact vehicle performance characteristics (Table 1). First, the modeled vehicles had a length of 43 ft (13 m), 1-m longer than the length of a standard 40-ft (12-m) international (ISO) shipping container. This was a good benchmark to use for vehicle length as it is the most common international container size. Vehicles were modeled as having constant acceleration and braking rates. For a fully loaded (single stack container) vehicle weighing 43 metric tonnes on flat ground, the power required to achieve this acceleration value when accelerating from 0 to 40 km/h was also calculated for reference. The 43-tonne weight of the Parallel Systems vehicle with a single fully loaded 40-ft container was assumed for all vehicles in the platoon because it represents the most conservative SPARC acceleration and braking performance relative to a conventional train. In practice, SPARC platoons are expected to carry a range of loaded container weights in addition to empty containers and possibly even unloaded SPARCs being moved from one end of the corridor to another to balance equipment under uneven traffic demand. However, given that the Parallel Systems vehicles are not designed to transmit large in-train (in-platoon) buff forces through the bumpers between vehicles, and have no ability to transmit draft forces, the overall acceleration, braking, and maximum speed of a Parallel Systems SPARC platoon will be governed by the vehicle with the lowest power-to-resistance ratio. Thus, assuming a single fully loaded container weight was appropriate for estimating transit time to meet the objectives of this study.
Assumed Parallel Systems Vehicle Characteristics Used in this Simulation Study
Importantly, the battery state of charge was not being tracked or calculated during these simulations. Thus, only corridors that are sufficiently short to allow a fully loaded vehicle to successfully complete a trip on one charge should be considered under the current methodology.
Because of the simplified vehicle characteristics, the train performance simulator integrated into the dispatching logic provides sufficiently detailed and accurate train time/distance performance results such that its output could be used directly to evaluate various operating strategies
Sample Corridor
This study examined SPARCs with the characteristics of prototype Parallel Systems vehicles via a simulation study of an example corridor. A corridor-based approach was used instead of a network-level analysis because several long-distance intermodal corridors are likely to exceed the battery range of SPARCs. Further, long-distance corridors with long mainline travel times are likely to benefit less from the reduced terminal dwell afforded by frequent SPARC platoon departures compared with shorter corridors where terminal dwell with conventional trains makes up a greater proportion of the overall transit time. Thus, many links on the national rail network do not fit the niche applications envisioned for SPARCs, and focusing simulation resources on a study corridor was a more efficient approach to conducting this research.
The sample line selected for analysis is an actual rail corridor that has been identified as a potential pilot route for SPARC operations. The specific origin, destination, and station locations have been anonymized to protect business interests. The selected study corridor is characteristic of a rural North American railroad branch line serving a few local customers. It is a single-track corridor with sparse and relatively short sidings. These sorts of corridors are not well served by current North American railroad practices of operating ever longer trains ( 14 ) because train meets at sidings too short to hold these long trains greatly increase the time delay and complexity of train meets ( 15 , 16 ). Furthermore, the low density of freight traffic demand on these lines may not generate sufficient economies of scale with conventional trains to entice a railroad to provide frequent intermodal service. Autonomous rail vehicles operating in platoons (or shorter autonomous trains) have the potential to economically service these corridors without substantial track infrastructure investment, outside of some level of turnout control necessary to support full automation.
The locations of each passing track on the corridor and its vehicle storage capacity are listed in Table 2. The 263-km corridor is relatively short by North American standards, which ensured that the Parallel Systems vehicles could traverse it fully on a single charge with a reasonable battery size. Separate vehicle and platoon energy simulation tests not included in this paper were performed to verify this.
Study Corridor Topology Including Distances Between Passing Sidings
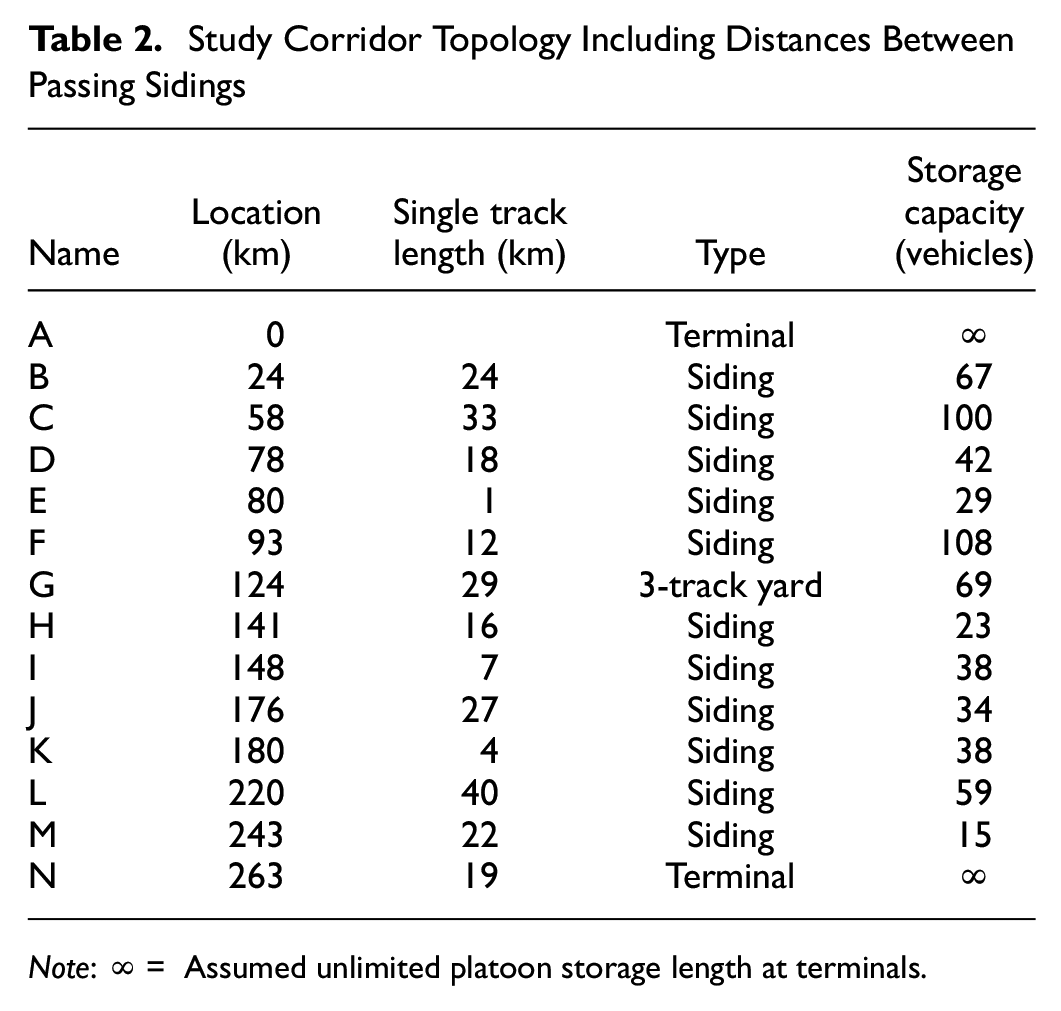
Note: ∞ = Assumed unlimited platoon storage length at terminals.
On a single-track rail corridor, mainline capacity, defined in relation to maximum trains per day, is inversely related to the length of the longest effective single-track segment ( 17 , 18 ). Since the maximum effective single-track length varies with platoon size, the capacity on this line varied with platoon length. The longest effective single-track section for a 15-vehicle platoon was 40 km between sidings K and L, whereas for a 59-vehicle platoon that exceeds the storage capacity of many of the passing sidings along the route, the longest effective single-track section was 96-km long between G and L.
The entire line had a maximum authorized speed of 40 km/h. There were four sections (2- to 4-km long) of speed restrictions varying from 20 to 32 km/h for various yards, terminals, and bridges.
The general route profile is upgrade (uphill) in the direction of increasing “milepost” from the port (Location A) to the inland terminal (Location N). The effect of instantaneous grade resistance is included in the simulation by adjusting acceleration and braking rates accordingly. Although this particular study did not track battery state of charge, the Parallel Systems vehicles have the capability to use regenerative braking to recover energy and recharge batteries when descending sufficiently steep grades. The ability to recover and reuse this energy is another potential advantage of SPARCs on routes with favorable profiles.
Experimental Design
To evaluate the use of Parallel Systems rail vehicles to transport containers on this corridor, an experimental design was developed to optimize platoon length without considering any track infrastructure upgrades outside of the necessary turnout switch automation. To evaluate the impact of varying platoon lengths on network performance, specific platoon lengths were selected such that varying numbers of passing locations could be used while maximizing the platoon length. The different platoon lengths under consideration ranged from 15 to 110 vehicles (Table 3).
Platoon Lengths Considered in the Experimental Design
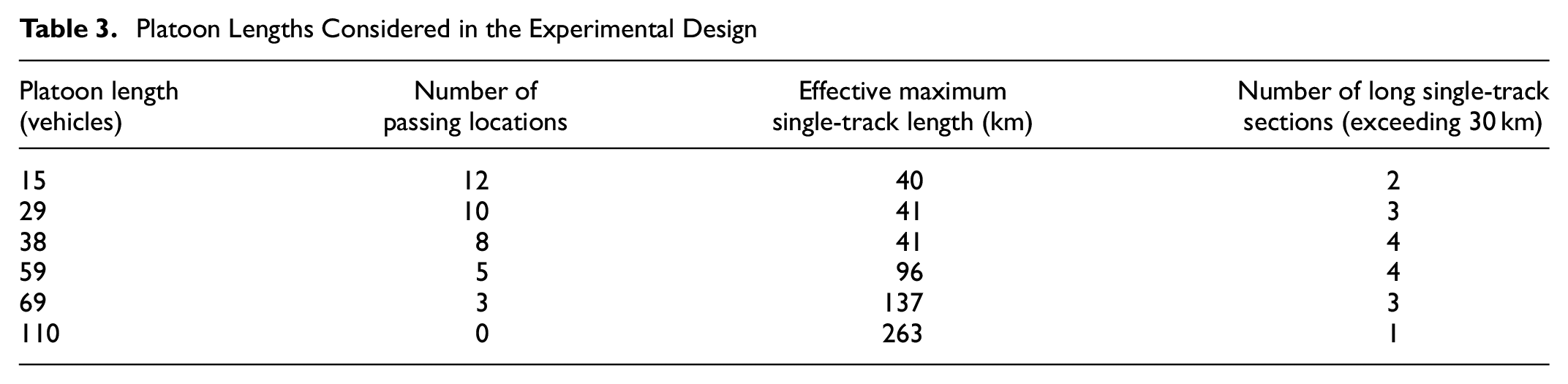
Although the first three platoon lengths had a near identical effective single-track length, the 15-vehicle platoons only encountered two single-track sections longer than 30 km, whereas the 29-vehicle platoons encountered three, and the 38-vehicle platoons encountered four. As the traffic level and the frequency of long single-track sections increase, there is a greater chance for platoons to be delayed substantially while waiting for a meet at the boundaries of these long single-track sections. A platoon size of 110 vehicles was included in the experimental design to represent a typical North American short-haul intermodal freight train length and provide a comparison point between SPARC platoons and conventional locomotive-hauled trains of railcars for this corridor.
Multiple departure frequencies were simulated for each of the six platoon lengths under consideration, starting from one platoon per day per direction, followed by a one platoon per day per direction increment. Platoons were added until network performance degraded, and platoons were accumulating and queuing at the Origin terminals A and N faster than they were proceeding through the network.
Conduct of Simulations and Evaluation Metrics
To conform to the experimental design, only uniform platoon lengths were simulated in each scenario. Platoons did not add or remove vehicles mid-route. The platoons of SPARCs were assumed to be the only rail vehicles operating on the corridor each day, with no other train traffic present.
Nominal planned platoon departures were evenly distributed throughout the day. Schedules were simulated for 9 days, with departures from one warmup day and one cooldown day excluded from the final results collected for analysis. To ensure system robustness to inconsistent actual departure times, each actual departure time was randomized using a uniform distribution of ±4 h around its nominal planned departure time. Each simulation scenario in the experimental design was replicated with 30 different random seeds to randomize these departures and capture the performance of the corridor under a diverse set of platoon conflicts at different passing siding locations along the corridor.
Two metrics were primarily calculated and used for analysis: average runtime and average transit time. The former metric is defined as the average time required for a platoon to cross the network from origin terminal to destination terminal. To normalize for slight variations in minimum network length depending on the platoon length, Equation 1 is used,
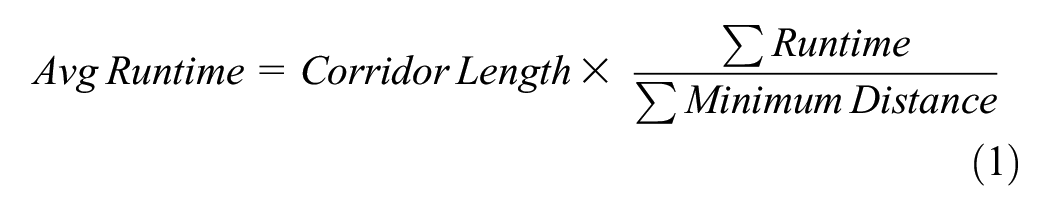
where
To evaluate the network performance on a container or carload basis, average transit time was used to track the time a container spends from origin availability to arrival at the destination terminal. The metric can be calculated in two parts: the time a container spends queued at origin, and the time it spends traveling on the corridor. The former part assumes that containers arrive at the origin terminal and become uniformly available between platoon departures, and that every vehicle in each platoon carries one container. The latter part is the average runtime calculated using Equation 1. The average transit time metric is calculated using Equation 2:

where
Results
To give a sense of the results for a single simulation, a stringline time-distance platoon diagram for a single random seed for 7 days of the scenario with ten 15-vehicle platoons per day per direction is presented in Figure 3.
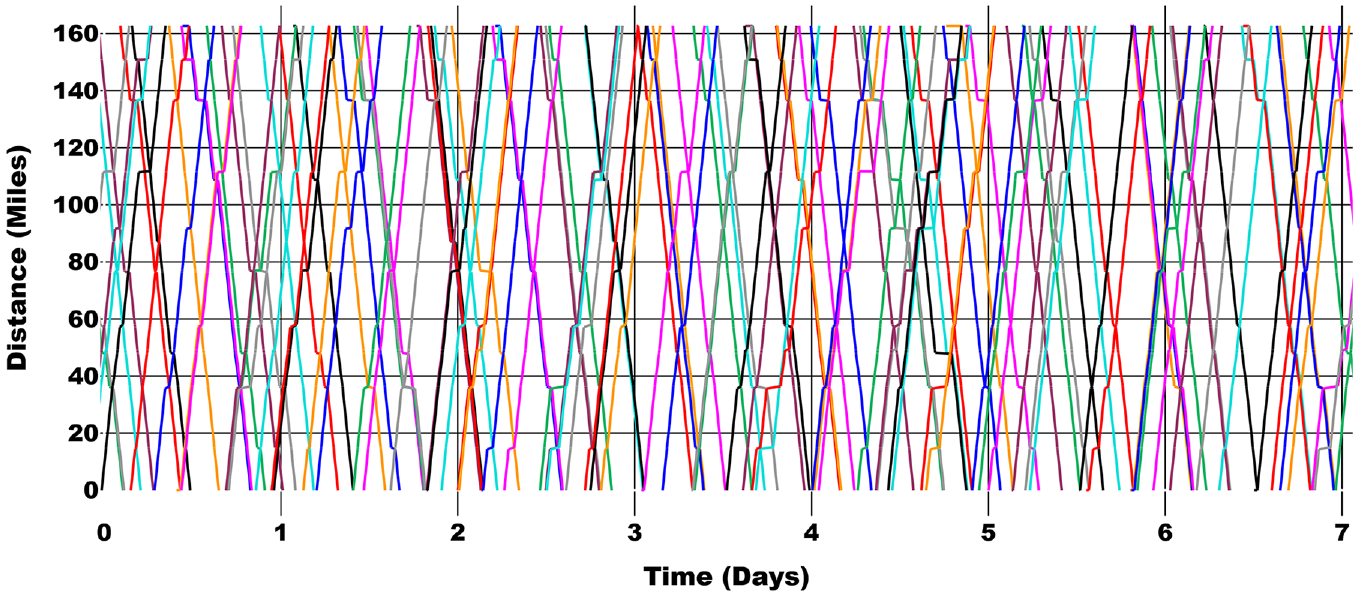
Example time-distance diagram for ten 15-vehicle platoons per day per direction.
Corridor Performance and Platoon Length
The compiled simulation results for the experimental design indicated that average runtime on the corridor increased with increasing train frequency and increasing train length (Figure 4). The increase in corridor traffic produced a corresponding increase in platoon meets, matching one of the expected trends underlying the hypothesis. Since longer trains cannot pass efficiently on a single-track corridor without regular, long sidings, platoons over 59 vehicles in length tended to perform very poorly on the network at any moderately substantial density. Shorter platoons can effectively run at a much higher departure frequency since they can effectively meet at many more locations along the sample route.
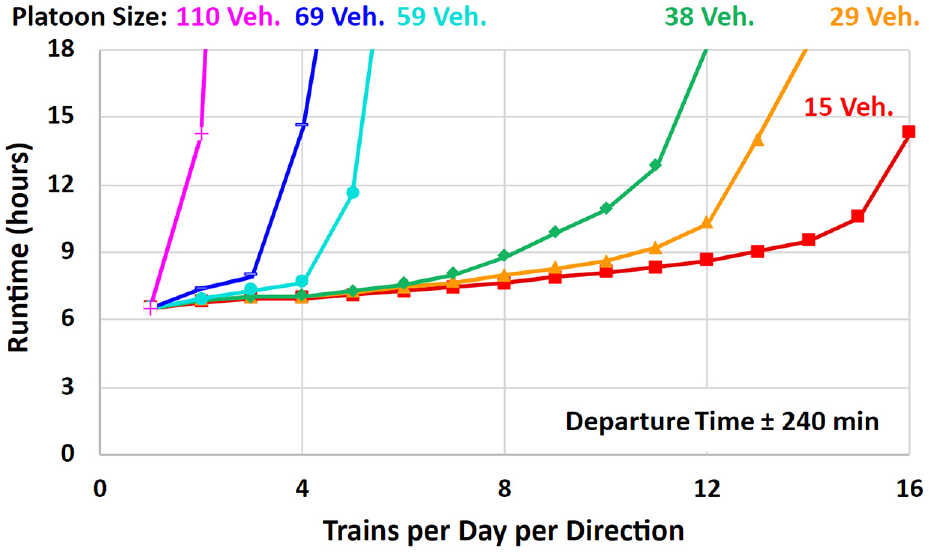
Platoon runtime for varying traffic parameters.
Most of the platoon lengths simulated in the experimental design had a convex transit time curve (Figure 5), since average runtime increased with increasing departure frequency and terminal dwell increased with decreasing departure frequency. This result matched the research hypothesis presented in Figure 2. The exception to this trend was 110-vehicle platoons, which had a strictly increasing average transit time versus departure frequency. This result arose because the average runtime for even two platoons per direction per day was too high for the decreasing origin terminal dwell to provide an overall average transit time reduction. The primary reason for such a high average runtime was that there were simply too few passing locations to handle the longest of the specified platoon lengths.
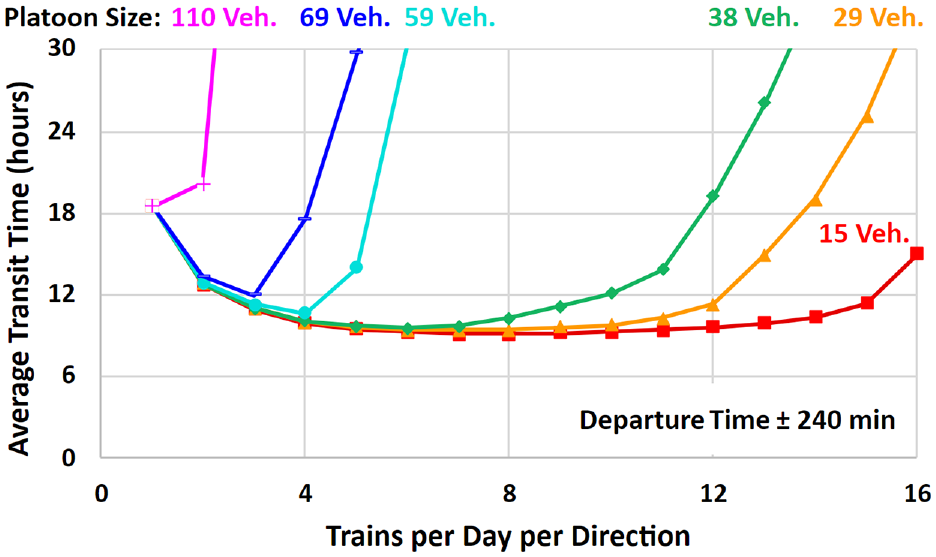
Vehicle (shipping container) transit time for varying traffic parameters.
When the average transit time was plotted against the vehicle throughput (product of trains per day per direction and platoon length) for each scenario in the experimental design (Figure 6), we found that for any given traffic demand there was a corresponding platoon length that minimized the average transit time. However, the overall minimum average transit time fell at a throughput volume that was well below other combinations of platoon length and platoons per direction per day that offered higher throughput volumes at slightly longer average transit times. Even though they featured slightly suboptimal average transit times, these operating scenarios may present more attractive business conditions as the economies of additional throughput volume may outweigh the slight improvements in average transit time.
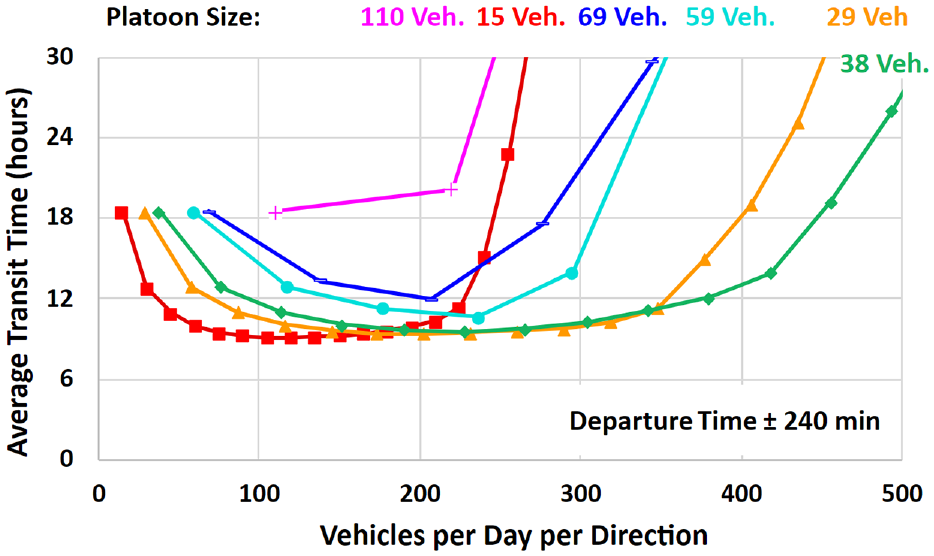
Vehicle (shipping container) transit time for varying vehicle throughput volume.
When selecting a platoon length to minimize average transit time while maximizing vehicle (shipping container) throughput volume, a pareto-optimal front toward the bottom-right corner of Figure 6 was formed, consisting of portions of the 15-, 29-, and 38-vehicle platoon results. The rapid increase in maximum single-track segment length for platoons longer than 38 vehicles caused a large increase in runtime at higher throughput volumes. This, in conjunction with longer average dwell for the same traffic volume, prevented them from having a competitive overall transit time compared with platoon lengths in the 15- to 38-vehicle range. In all cases, platoons of SPARCs that were far shorter than conventional locomotive-hauled trains (represented by the 110-vehicle curve) exhibited results that were closest to the pareto-optimal point of shortest average transit time and maximum throughput volume.
Conclusions and Future Work
The optimal trade-off between increasing train length and increasing departure frequency will shift as railway vehicle and operating technology evolves. New autonomous rail vehicle technologies reduce the incentive for increasing train length by eliminating the fixed per-train crew overhead costs. Using shorter trains allows departure frequency to be increased, providing more frequent and consistent service to customers. Assuming that demand is not perfectly matched to train departure times, more frequent departures will also reduce the total freight transit time.
In the study corridor consisting of a single track with short sidings, for any given freight demand under 500 containers per day per direction, the optimal platoon length to minimize the transit time existed between platoons 15- and 38-vehicles long. These smaller-sized platoons were better able to operate on the short sidings at the inconsistent spacing present on this corridor when compared with traditional locomotive-hauled trains of typical sizes. For these platoon lengths, SPARCs represent a good candidate because they offer optimized propulsion and energy storage, even at very small platoon lengths. Importantly though, these results are not necessarily applicable to double-track corridors, or those with high freight demand and existing long sidings. Since autonomous rail vehicle technologies do not necessarily help reduce train spacing, shorter trains and platoons continue to have a lower theoretical maximum throughput on full double-track lines with homogeneous traffic.
In addition to the transit time benefits demonstrated via the case study corridor simulations summarized in this paper, SPARCs have several other potential benefits that make them attractive for implementation on corridors of appropriate length and service demands. Depending on the source of electricity used for battery charging, SPARCs could help decarbonize intermodal freight transportation that is currently reliant on diesel fuel. Operating SPARCs in platoons of closely spaced vehicles would reduce aerodynamic drag relative to highway transportation via trucks and, for longer platoons, eliminate the drag arising from conventional intermodal rolling stock that requires larger gaps between individual containers. The reduced overall length of each SPARC relative to conventional intermodal rail equipment also makes the most efficient use of existing track lengths at passing sidings and within terminals, further increasing throughput capacity. In addition to eliminating mainline crew costs, by using automation, SPARC platoons are not subject to re-crew delays or costs enroute, making them more robust to disruptions. The ability of SPARCs to split into shorter platoons or merge into longer platoons gives them additional flexibility compared with conventional coupled rolling stock, which may allow SPARC operations to more quickly recover from disruptions and more effectively use existing track infrastructure that cannot accommodate longer conventional intermodal trains.
When interpreting these results for a single study corridor and preliminary SPARC vehicle characteristics based on prototype designs, it is essential to consider that some important limitations remain. Firstly, this paper does not evaluate the technical or economic feasibility or practicality of implementing any specific SPARC design. There are major technical and regulatory hurdles that must be overcome to allow vehicle and platoon design/implementation for the results of this paper to be realized in the real world. Additionally, although it is believed that the analysis conducted was sufficiently general to be applied to any SPARC design, it is certainly possible for other SPARC designs to be developed that have sufficiently different characteristics for this analysis to no longer apply. Lastly, this study relied entirely on simulation to develop the operational data. Any major differences between the assumptions made in developing the simulation and the eventual production vehicle characteristics and operating strategies for SPARCs may result in deviations from the results presented.
In addition to vehicle technology considerations, there were limitations to the underlying dispatching logic used for the simulation approach. First, the results for very short platoons (<5 vehicles) showed that multiple platoons were rarely fleeted together. The dispatching logic instead preferred to alternately send a platoon in one direction through a single-track section, and then one platoon in the other direction. Thus, extremely low terminal dwell and relatively higher mainline running time scenarios may have understated the benefits of very short platoons by suboptimal dispatching strategies that avoided fleeting and artificially inflated average transit time. Second, platoons were not allowed to dynamically resize along the route (and the workaround of running single vehicle platoons with no required following headway had the issues described above). Thus, the potential benefits of dynamic platooning to more efficiently use sidings of various lengths along the corridor have not been evaluated. Future research should be conducted to improve the underlying dispatching logic and evaluate the impacts of these alternative operating strategies facilitated by the unique characteristics of SPARC platoons.
Working within the confines of the existing dispatching logic, there are still several avenues for future research. First, the potential to increase volume and/or reduce transit time by using custom lengths for each platoon departure should be investigated. An optimization approach could be utilized to choose the length of each departing platoon given a specified container arrival pattern at each terminal. Additionally, simplified terminal modeling could be used to determine the total number of vehicles required to support a given operating plan of platoon departures each day. This research would provide valuable insights into the total cost of establishing and sustaining an intermodal rail service using platoons of SPARCs. Lastly, the feasibility of SPARCs compared with conventional trains on longer corridors or mixed with conventional traffic should be evaluated.
Footnotes
Acknowledgements
The authors thank Marty Schlenker for his helpful discussions and insights in the conduct and analysis of the simulation experiments.
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: G. Roscoe, M. Parkes, T. Dick; data collection: G. Roscoe, M. Parkes, T. Dick; analysis and interpretation of results: G. Roscoe, M. Parkes, T. Dick; draft manuscript preparation: G. Roscoe, M. Parkes, T. Dick. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Parallel Systems and the Department of Civil, Architectural and Environmental Engineering at the University of Texas at Austin.
{kind=link}