
Abstract
Highways promote economic growth and social development. Traditionally, pavement management considers pavement conditions for maintenance and rehabilitation (M&R) decision-making along with system constraints. One of the major tasks of highway agencies is to promote safety. Highway safety involves a complicated interaction of multiple factors. However, it is well established that there is a link between pavement surface friction and safety. Pavement surface characteristics affect the safety and comfort of passengers. Since the pavement management process considers only pavement physical conditions in M&R decision-making, there is a need to include safety indicators in the process to promote both riding comfort and safety. This study aims to integrate the pavement surface friction, that is, the skid resistance, into traditional pavement management. An optimization model has been proposed based on multi-choice goal programming by systematically integrating skid resistance into pavement M&R decision-making along with pavement conditions. Multi-choice goal programming allows setting interval aspirations rather than a fixed target. A case study has been conducted to demonstrate the usefulness of the proposed model in managing pavement conditions and pavement skids together. The case study considered five goals related to pavement conditions, skid states, and M&R costs. Interaction among the goals is discussed in different scenarios. The case study also uses friction treatment with traditional pavement management treatments. The model can capture the interaction between pavement conditions and pavement skids and determine the program that best achieves the goals. The proposed method provides a simple approach to selecting a network-level M&R program and obtaining insights into the management of conditions and skid together.
Keywords
Highways are one of the major components of the land-based transportation system. Highways are crucial to economic development and growth (
1
). They bring positive changes to the individual and social life of human beings and ensure access to employment, social, health, and education services. The Federal Highway Administration (FHWA) mentions the following (
2
):
Highways are the backbone of the American transportation system, moving the vast majority of the Nation’s products and goods, and providing the vital link between all modes of transportation. As the foundation of the Nation’s economy, highways have made it possible for the American people to enjoy, benefit from, and essentially take for granted, the ability to safely and efficiently travel wherever and whenever they wish.
Among all the infrastructures of highways, the pavement is the largest and the most important component of the highway system, and it experiences the most deterioration with the growing travel demand from both freight and passengers. Pavement infrastructure deteriorates with usage and time unless required maintenance and rehabilitation (M&R) are applied on time. The M&R of pavement require extensive investment. In the U.S.A., pavement infrastructures are declining in condition because of growing usage and deferred maintenance. The American Society of Civil Engineers (ASCE) graded American roads as “D” in 2021. ASCE mentioned that 43% of public roads in the U.S.A. are in poor condition, and there is a significant backlog of rehabilitation needs of around US$435 billion ( 3 ). Poor roads not only increase user costs but also increase safety risks ( 3 ).
Highway agencies in the U.S.A. are responsible for mobility, accessibility, safety, and economic development related to highways ( 4 ). Highway agencies are facing challenges in maintaining an acceptable level of service of the pavement because of aging and deterioration, increased demand, more accountability, and funding uncertainties. Central and local transportation agencies must deal with multiple and conflicting stakeholder goals ( 4 , 5 ). In addition, the need for sustainable management with respect to environment and safety becomes evident ( 6 , 7 ). With the advent of automated and connected vehicles, the requirement for well-maintained and safe roads will increase ( 8 ). The ongoing challenge in pavement management is to account for not only pavement conditions but also safety aspects ( 9 ). To be consistent with pavement management practices, pavement skid resistance can be coupled with pavement condition, which in turn improves the pavement management practices. Skid resistance is one of the many contributing factors to highway crashes.
Pavement management often adopts pavement conditions for programming M&R strategies. Highway agencies usually gather multiple condition data, such as roughness, friction, rutting, cracking, and raveling. With this information, highway agencies often develop a single index to represent pavement conditions ( 10 ). For instance, the Texas Department of Transportation (TxDOT) uses the condition score, which is a combined index of distress ratings and ride quality ( 11 ). Safety indexes such as crash rate, crash cost, or both, are rarely employed in the pavement management process because of the complexity of traffic crashes ( 12 ). Multiple research efforts have investigated the safety and pavement condition relationship ( 13 ). Researchers found a correlation between crash frequency and pavement conditions at different crash severity levels ( 12 , 14 ). Highway safety analysis has often employed roughness as a performance indicator ( 15 , 16 ). However, skid resistance is gaining increased attention in safety analysis because of its strong correlation with highway safety ( 17 ). However, the integration of skid resistance in pavement M&R programming is not mature.
This study proposes a pavement M&R programming model where pavement condition and pavement skid resistance are coupled together for pavement M&R decision-making. The proposed model incorporates multiple objectives/goals on pavement conditions, skid resistance, and M&R costs/budget. A multi-choice goal programming (MCGP) model has been developed to allow the decision-maker to set an interval of targets for each goal. The pavement deterioration process is modeled as a Markovian state-space model. The study helps the state highway agency in scheduling pavement M&R satisfying the multiple goals of pavement condition, skid resistance, and budget.
Background
Highway agencies have developed and used pavement management systems where pavement-related information can be stored, retrieved, and analyzed to make strategic decisions on pavement M&R to maintain pavement condition ( 18 ). Research on pavement maintenance decision-making has increased with the development of computing technology ( 19 ).
Pavement M&R programming often involves consideration of strategic goals, management objectives, condition of the pavement network, policies related to engineering, and political and administrative aspects ( 20 ) based on the level of decision-making. There are two levels of decision-making in M&R programming problems, namely project-level programming and network-level programming ( 21 ).
Project-level decision-making involves a single facility or project where the decision-maker conducts a detailed analysis of variables to evaluate the M&R program ( 22 ), while the network-level program considers the entire network or part of a network with multiple facilities subject to some system constraints ( 23 – 27 ). Pavement management can be a M&R programming problem grouped into the following ( 26 ):
budget planning, where the M&R cost is minimized subject to performance requirements;
budget allocation, where performance is maximized subject to budgetary restriction.
Network-Level Programming
Several approaches for network-level M&R programming have been proposed by various researchers in recent years. Most of the proposed optimization approaches have two essential components in common: an optimization algorithm and a pavement performance prediction model. Optimization approaches can be subdivided into traditional mathematical programming and bio-inspired/heuristic algorithms ( 28 ). Traditional approaches include linear programming, integer programming, dynamic programming, and nonlinear programming ( 29 ).
Linear programming is employed often with Markov chain-based deterioration models where the network is subdivided into condition groups, and treatments are assigned to each group ( 25 , 30 , 31 ). However, the linear programming model cannot be applied to specific facilities and is used only for strategic decision-making. Owing to this fact many researchers have used integer programming with binary decision variables to formulate pavement M&R programs. The solution to integer programming assigns maintenance treatments directly to individual facilities ( 24 , 32–34).
Dynamic programming methods are used when numerous decisions need to be made sequentially ( 31 , 34 , 35 ). Genetic algorithms are one of the most popular methods applied in network-level maintenance programming ( 36 – 38 ).
Network-level pavement M&R programming is further divided into single-objective optimizations and multi-objective optimization techniques. In single-objective optimization, models deal with the minimization of costs or maximization of M&R benefits/effectiveness subject to system and budgetary requirements ( 25 , 39 , 40 ). Multi-objective optimization of pavement M&R programming incorporates multiple conflicting objectives subject to system and budgetary constraints ( 24 , 26 , 27 , 41–43).
To meet the current needs, pavement M&R decision-making should incorporate multiple strategic goals to achieve sustainable development ( 44 ). In recent years most of the pavement M&R programming models have incorporated the goals/objectives of cost minimization, social benefit maximization, environment-friendly M&R programs, and sustainable development-oriented policies ( 45 – 47 ). Although there are abundant multi-objective optimization models in pavement M&R, 90% of the models use pavement condition and agency cost as objectives ( 44 , 48 ). One important indicator of highway performance, that is, safety indicators, such as skid resistance, is often ignored in pavement M&R optimization, and future research needs to consider safety indicators in the pavement management process ( 44 ).
In recent years consideration of safety in pavement M&R programming has received considerable attention ( 12 ). Highway safety performance depends on multiple contributing factors, including highway geometries and human factors. Many studies found a correlation between safety performance and pavement surface friction ( 12 , 49–51). It is established that pavement skid resistance influences crash frequencies and severities both on wet and dry surfaces (52, 53). In addition, overall pavement condition has a considerable impact on pavement safety performance ( 12 , 14 , 15 ).
Goal Programming and Multi-Choice Goal Programming
Goal programming (GP) is one of the most widely used techniques by decision-makers to solve multi-criteria decision-making problems. It is an optimization method that can be applied to achieve the best outcomes while satisfying multiple and conflicting objectives. GP was first introduced by Charnes and Cooper ( 54 ) and further enhanced by several studies ( 55 – 58 ). GP allows decision-makers to optimize the objectives by setting aspiration levels for each goal and minimizing the unwanted deviations from the aspiration levels through an achievement function ( 59 ):
where
Many decision-making problems may involve a situation wherein multiple aspiration levels of goals exist. Often decision-making problems have multiple decision-makers/stakeholders with different target levels for each goal associated with the problem. MCGP addressed this situation by allowing more than one target level for each objective within the framework of GP. The concept of having multi-choice aspiration levels (MCALs) improves the utility of GP and helps avoid the underestimation of the decision ( 63 ). The concept forms a MCAL in GP as follows:

Subject to:

where
The MCAL problem offers the decision-maker the ability to set a discrete set of choices for the aspiration levels of each goal and pick the optimal one. Such problems cannot be solved using traditional GP approaches. Chang ( 63 ) introduced MCGP for solving MCAL problems and revised the MCGP model where aspiration may lie within certain ranges as a form of uncertainty or imprecision ( 64 ). The MCGP model has been used for many decision-making problems in recent years ( 65 , 66 ). The mathematical expression of MCGP is as follows:
where
Objective and Scope
This study aims to (1) develop an optimization framework that can help select strategic M&R programs at the network level by integrating pavement condition and pavement skid states using MCGP and (2) demonstrate the usefulness of the proposed model for network-level pavement maintenance budget scenario decision-making. The scope of the model can be easily adapted and implemented when decision-makers consider integrating skid state with condition management.
Model Formulation
Pavement Performance Model
To simplify the computational complexities, the proposed model assumes a discrete-time state-based model for the prediction of future pavement performance (
67
). That is, the Markov chain-based pavement performance model is used in the present study. Markov chain-based performance prediction models have been utilized in several pavement management studies (
68
,
69
). These performance prediction models employ Markov processes to demonstrate the evolution of pavement conditions into discrete states. That is, Markov chain models represent how pavement conditions would move from the current state to a future state. This transition of pavement condition states is determined with the help of transition probabilities, which represent the likelihood of a pavement deteriorating from its current state to another state without any maintenance intervention. The transition probabilities are often approximated from the historical pavement condition data considering relevant factors. In a state-based model, the pavement condition at discrete time point

The pavement condition in the future (

where
The state-based model can also be used to model pavement skid resistance deterioration over time ( 68 ):
Multi-Choice Goal Programming Model
The MCGP model for pavement M&R for managing pavement condition and pavement skid resistance is as follows.
Consider a network of pavement with a total length


Equation 1 represents the initial pavement condition state at the beginning of the planning period where
Equation 4 shows the deterioration of the pavement skid between the two consecutive periods, where


Equations 5 and 6 denote the proportion of pavement in different condition states and the proportion of pavement in different skid states, respectively. Decisions on M&R treatment for pavement condition state and pavement skid state are represented by Equations 7 and 8, respectively, where



Equation 9 represents the M&R treatment cost (



Equations 13–15 represent the MCAL goals for the pavement condition state, where



Equations 16–18 represents the multi-choice goal settings for pavement skid state, where



Equations 19 and 20 denote that the deviational variable should be nonnegative:


Decision variables for pavement M&R are defined in Equations 21 and 22:


Equation 23 expresses the objective function of the optimization problem, which is the minimization of the summation of unwanted deviation accounted for in the model settings:
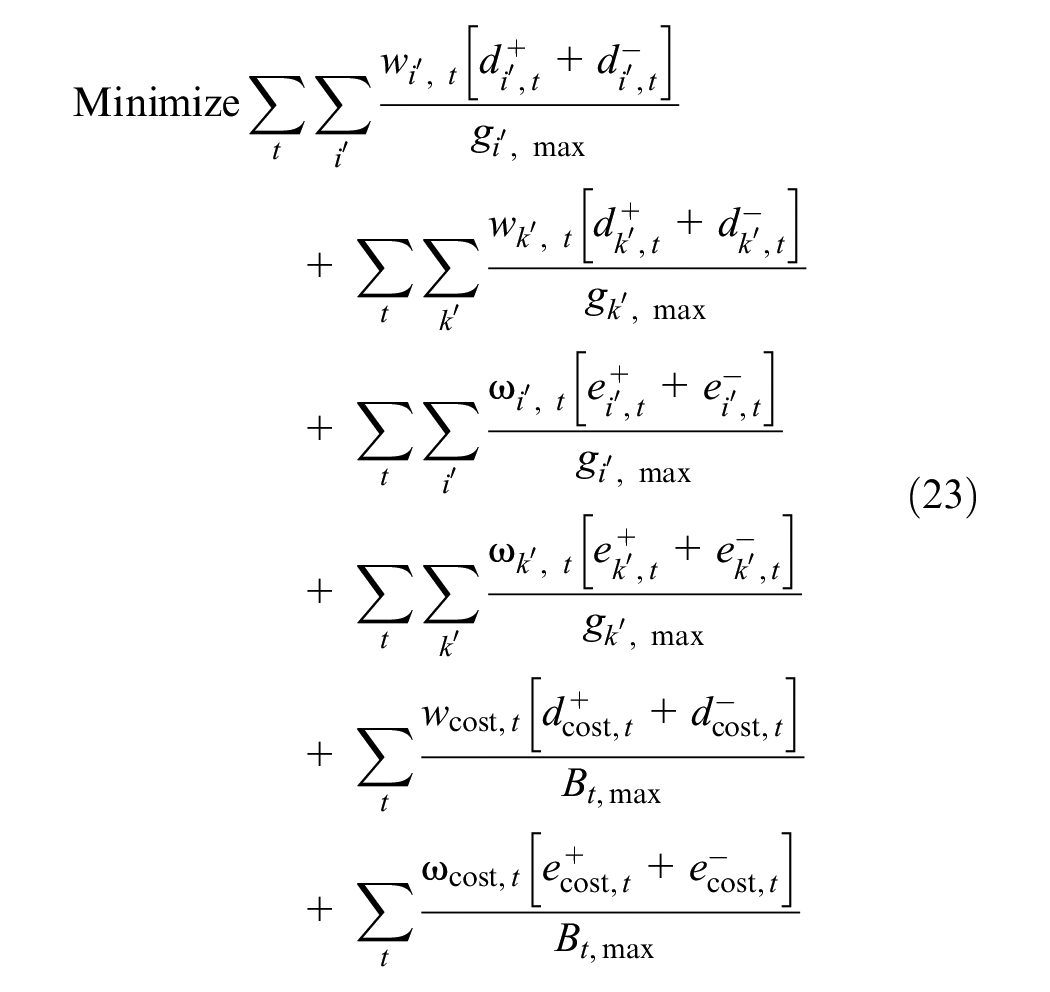
The final optimization problem becomes minimizing Equation 23, subject to the constraints in Equations 1–22.
Case Study
This section presents a case study illustrating the application of the model developed in this study, which optimizes the pavement M&R program under fixed intervals of budget and goals. It is assumed that not all the input data are readily available, and some of the values for certain input parameters are assumed based on the literature available and the judgment of the authors. The model is flexible enough to apply to any pavement network. A hypothetical district-level road network has been used for the illustrative numerical application of the proposed model. The model was programmed with the general algebraic modeling system ( 70 , 71 ) on a standard laptop computer. The model is solved using the Cplex solver from the NEOS server ( 72 – 74 ). The objective of the case study is to demonstrate the application of the proposed model in pavement M&R scheduling.
Data and Assumptions
The network-level pavement conditions data and pavement skid resistance data used in the case study have been adopted from the 2017 TxDOT pavement management information system (PMIS) ( 72 ) for a district-level pavement network. In the case study, the condition score of pavement sections is used as the performance indicator for the pavement conditions, and the skid number (SN) of pavement sections is used as the performance indicator for skid resistance. The condition score of a pavement section is a combined score for distress and ride quality ( 11 ). The range of the condition score is from 0 to 100. This case study uses the SN as the performance indicator for pavement skid resistance. The SN is a popular index to measure skid resistance among state departments of transportation (DOTs) in the U.S.A. The SN is determined by the procedure described in specification ASTM E274/E274M-15 ( 76 ). SN data are collected from the TxDOT PMIS. TxDOT collects skid data at the network level for every ½ mile pavement data collection section. These skid data are collected using a locked wheel trailer as per ASTM E274 ( 77 , 78 ). The SN is determined by multiplying the ratio of horizontal force and vertical load by 100. Based on the SN data, the SNs are discretized into six states for this study ( 68 , 77 ). The length of the road network in this case study is considered to be 10,325 lane miles.
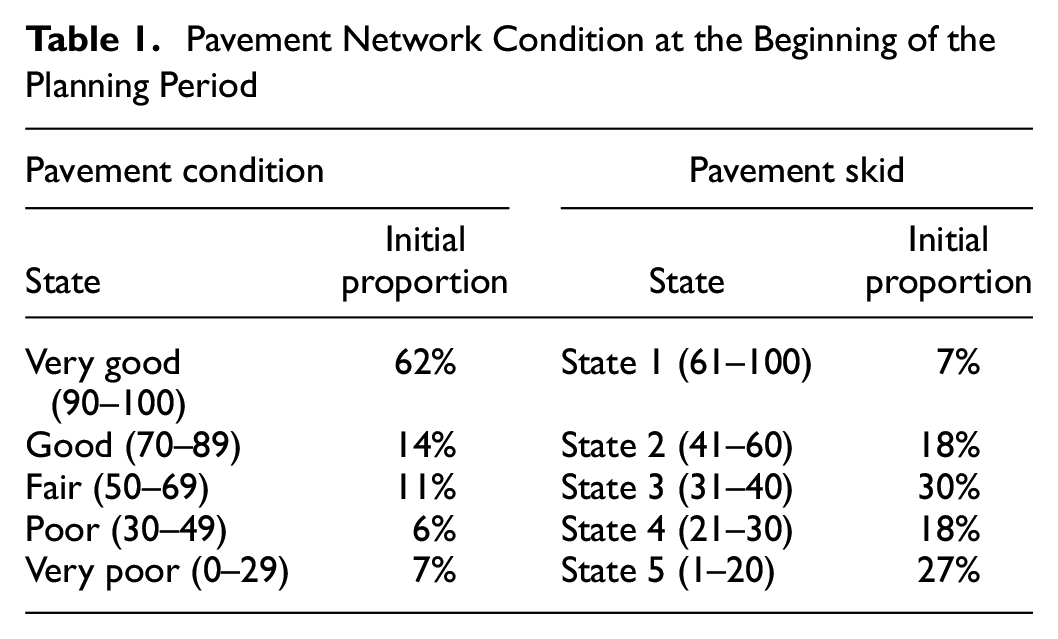
The data in Table 1 is the input data for the initial pavement conditions and pavement skid conditions at the beginning of the planning period. The numeric values in this table represent the percentage of road network in the corresponding condition states for both pavement condition score and pavement SN. The condition states are adopted from the TxDOT PMIS.
Pavement Network Condition at the Beginning of the Planning Period
The goal of the case study is to develop a pavement M&R plan for a planning period of 10 years where M&R treatments will be applied at the beginning of each period.
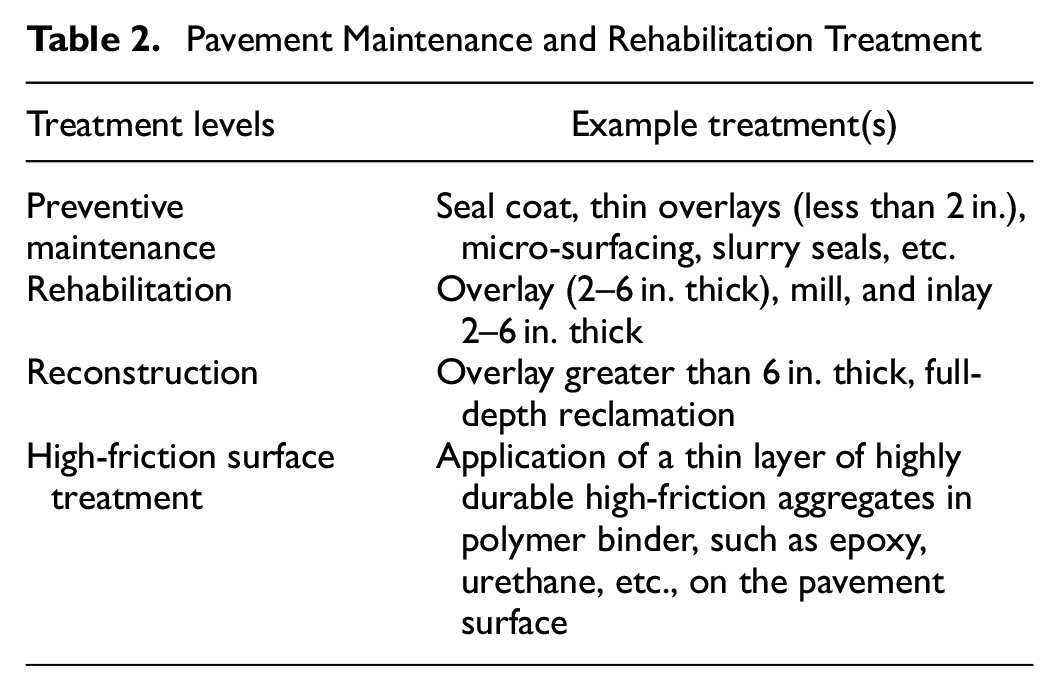
M&R treatments in pavement condition management along with pavement skid management can include treatment levels from the least expensive preventive maintenance to the most expensive reconstructions. This treatment level improves the pavement condition as well as the skid condition. However, to improve the skid condition, sometimes other high-friction surface treatments (HFSTs) are used. HFST incorporates the application of high-quality aggregate and a polymer binder mix on pavement surfaces to restore and maintain pavement friction ( 79 ). In this case study, treatment levels combining traditional pavement M&R are also considered. Seven treatment levels are considered for the management of pavement condition and pavement skid together: do nothing (DN), preventive maintenance (PM), preventive maintenance with HFST (PM-HFST), rehabilitation (Rehab), rehabilitation with HFST (Rehab-HFST), reconstruction (Recons), and reconstruction with HFST (Recons-HFST). Table 2 represents treatment type examples for different treatment levels. Table 3 presents the treatment levels with and without HFST unit costs. The unit costs are adopted and modified from TxDOT’s 4-year pavement management plan ( 75 ).
Pavement Maintenance and Rehabilitation Treatment
Pavement Maintenance and Rehabilitation (M&R) Treatment Levels and Unit Costs
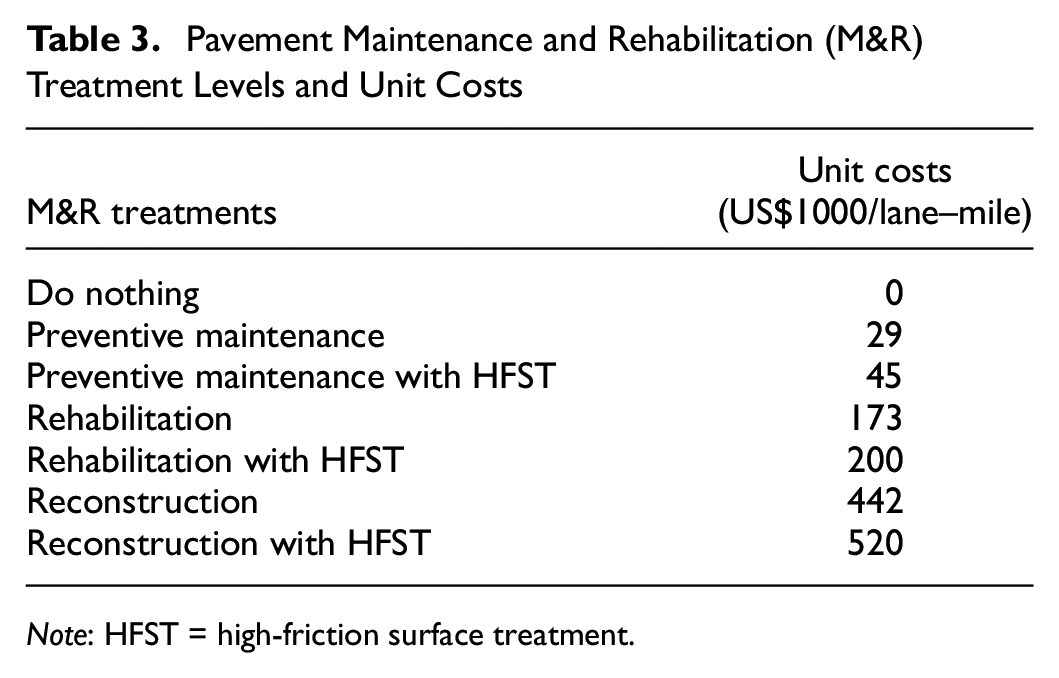
Note: HFST = high-friction surface treatment.
Transition probabilities for pavement conditions can be estimated by analyzing historical condition data and practical engineering assumptions ( 80 – 82 ). Similarly, transition probabilities for pavement skids can also be estimated from historical data ( 68 ). Table 4 shows the transition probabilities used in this case study for both pavement conditions and pavement skids.
Transition Probability Matrices for Different Treatment Levels for Pavement Conditions and Pavement Skid
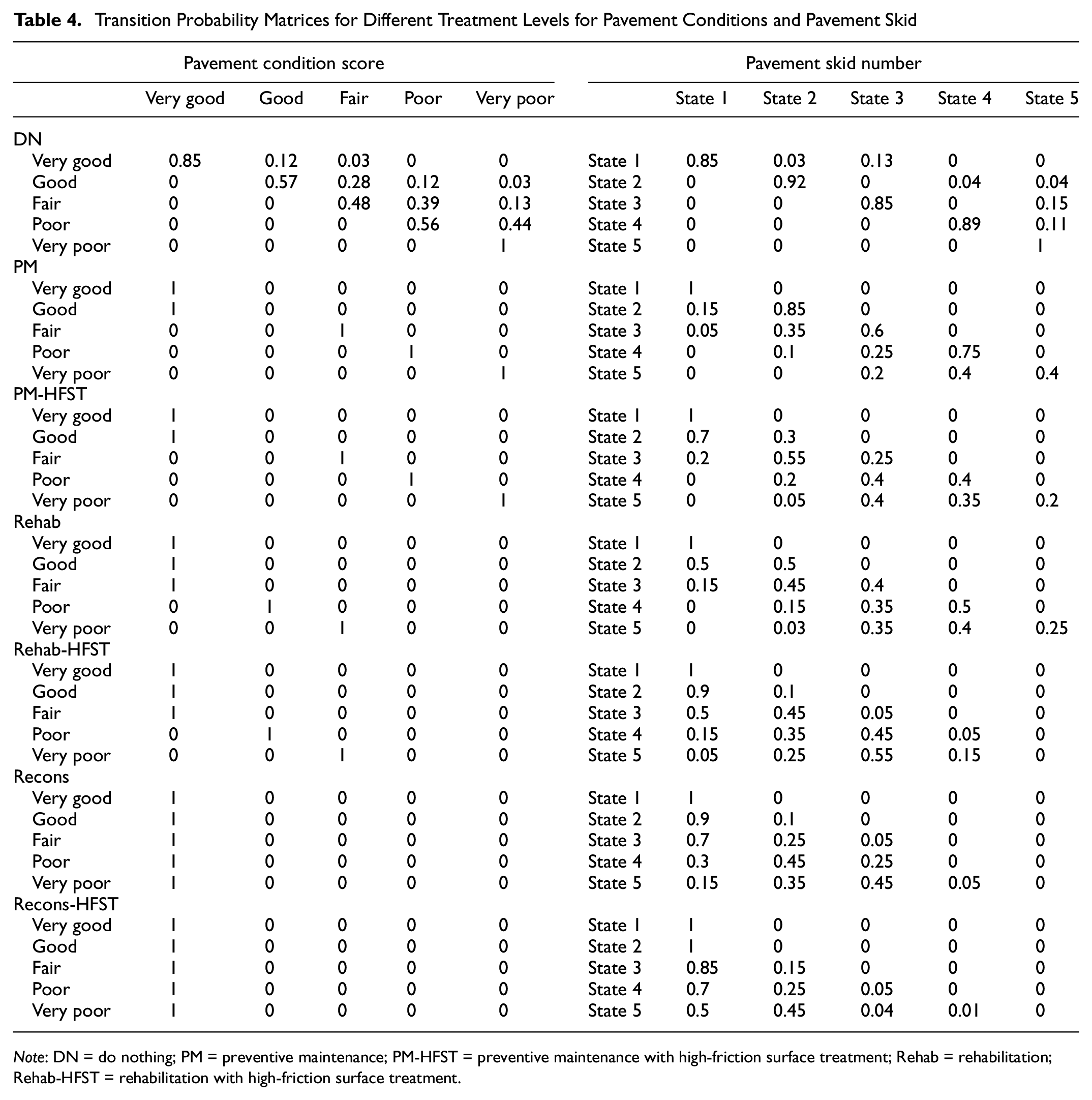
Note: DN = do nothing; PM = preventive maintenance; PM-HFST = preventive maintenance with high-friction surface treatment; Rehab = rehabilitation; Rehab-HFST = rehabilitation with high-friction surface treatment.
Goals for the MCGP model can be selected based on decision-maker preferences. In this case, study goals are considered for cost/budget, pavement condition states, and pavement skid states. Five goals are considered for this case study:
Goal 1: maximization of the proportion of lane miles in very good and good condition;
Goal 2: minimization of the proportion of lane miles in poor and very poor conditions;
Goal 3: maximization of the proportion of lane miles in skid states 1 and 2;
Goal 4: minimization of the proportion of lane miles in skid states 4 and 5;
Goal 5: minimization of treatment costs or budget.
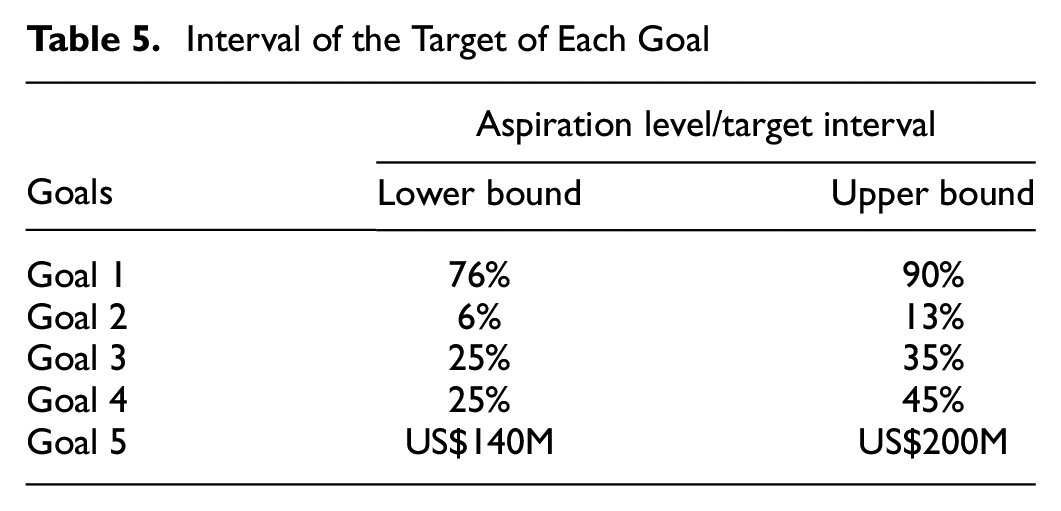
Note that the goals are the achievement of corresponding attributes within the limits of the target associated with goals, and the goals are incorporated in the objective function (Equation 23) through deviational variables. For instance, Goal 1 represents achieving maximum good or better pavement conditions within the limit of its target, that is, the proportion of good or better pavement conditions should lie within the interval (76%–90%). However, underachievement or overachievement may occur because of interactions among goals. The aspiration levels or targets for the above goals are intervals in the proposed model. Table 5 represents the aspirations of the goals.
Interval of the Target of Each Goal
Results and Discussion
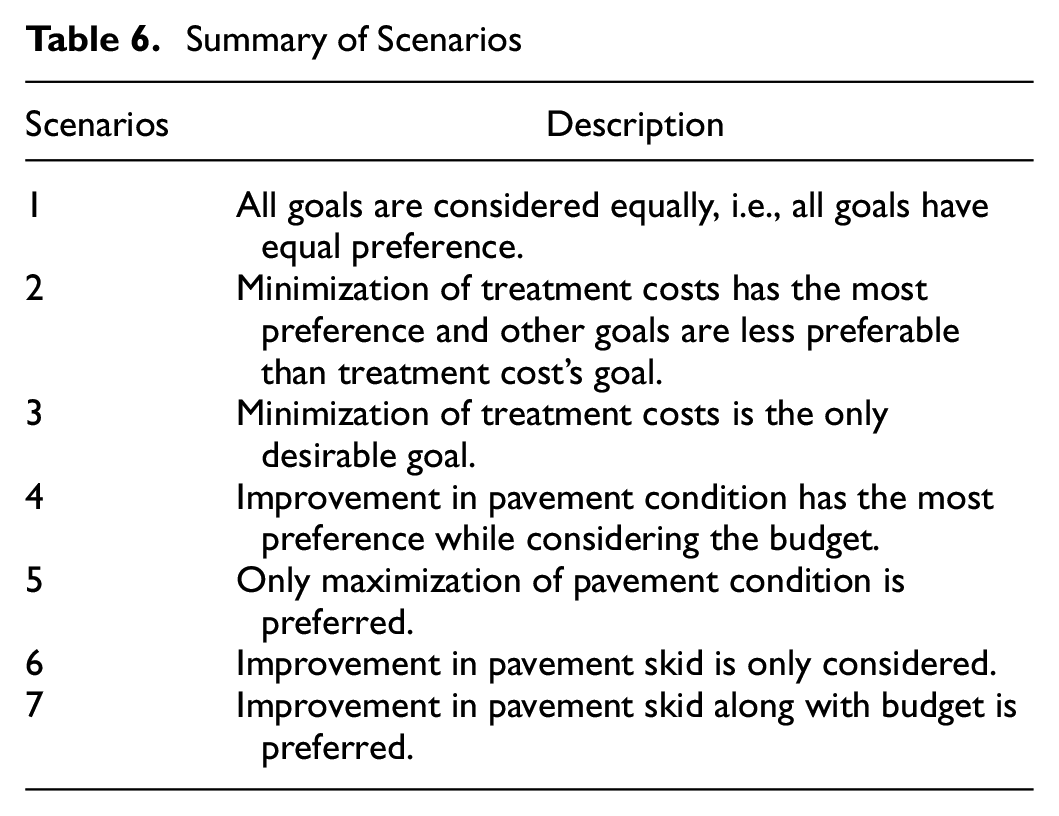
The case study considers seven scenarios by placing different weights on deviational variables associated with the goals. Scenario 1 represents consideration of all goals equally, that is, the optimization model treats each goal with the same level of preference. In Scenario 2 the goal of treatment costs is the most desirable and the rest of the goals collectively have the same desirability. Scenario 3 is the minimization of treatment cost only and the model considers the other goals as constraints. In Scenario 4, the decision-maker prefers to maximize pavement condition performance with little consideration for the treatment cost. Scenario 5 denotes the maximization of pavement conditions only, while Scenario 6 represents the maximization of pavement skid performance. Scenario 7 maximizes the skid performance with consideration of treatment costs. The next section discusses the contrast among these scenarios with respect to pavement condition states and pavement skid states. Table 6 summarizes the scenarios. Table 7 shows the weight setting of the seven scenarios.
Summary of Scenarios
Scenarios and their Weight Settings
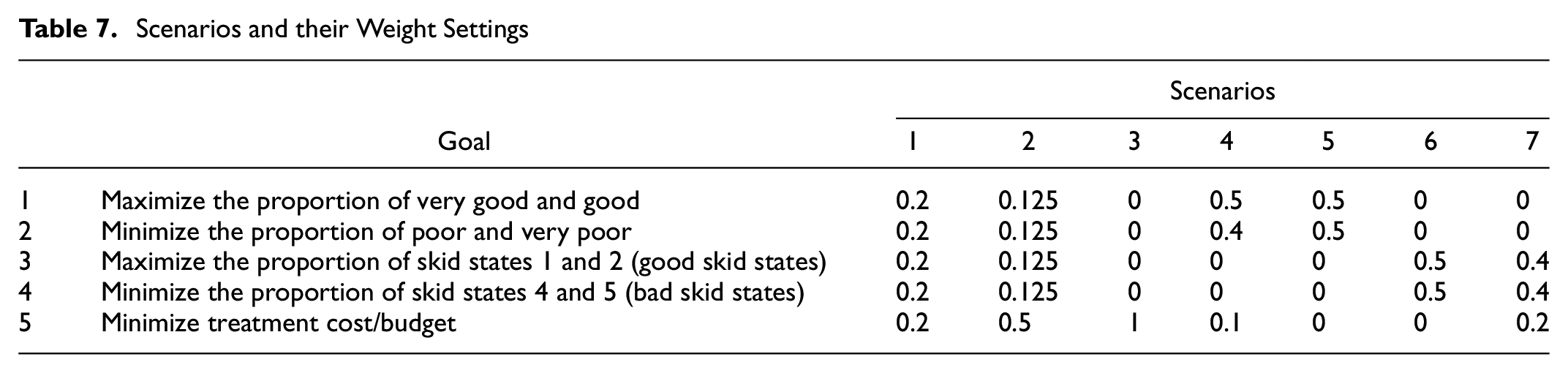
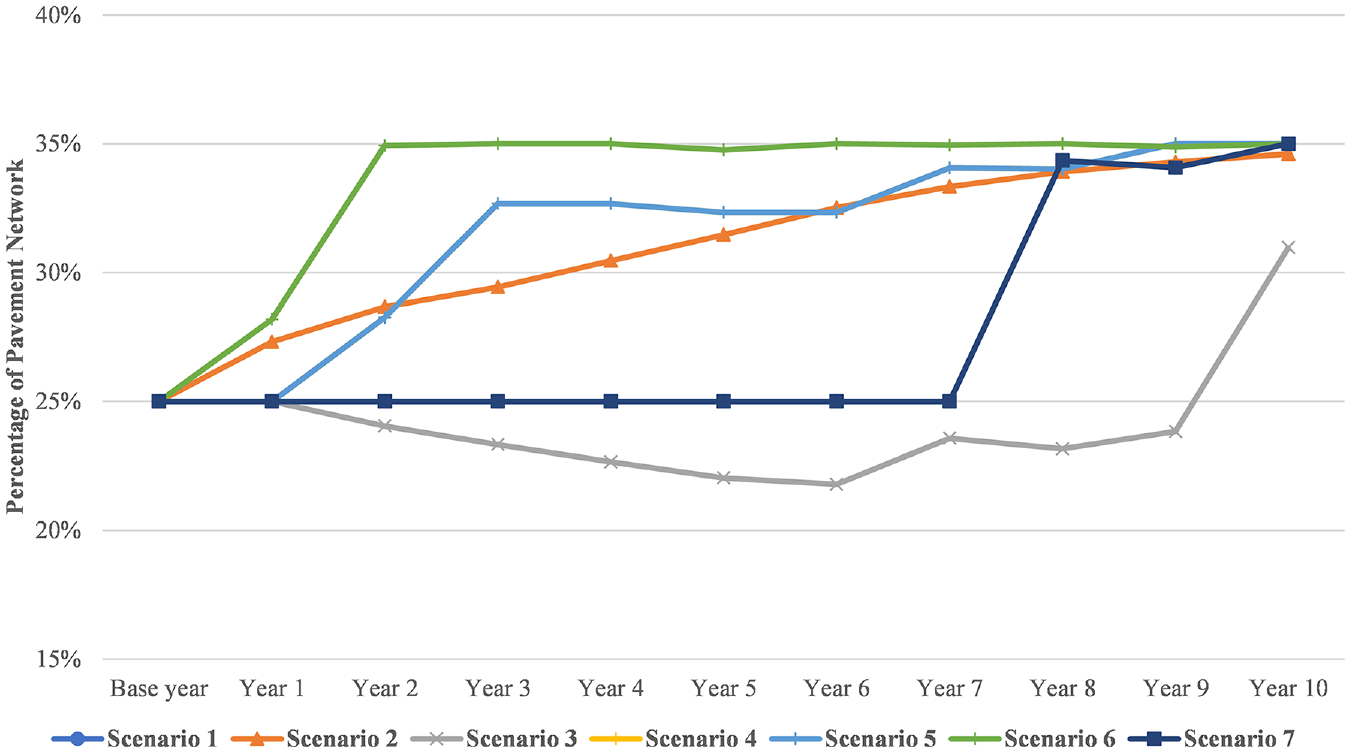
Figure 1 shows the contrast among different scenarios with respect to the fraction of the pavement network in very good to good condition. Scenario 5 has the best performance for pavements in very good and good conditions, which is intuitive since Scenario 5 considers only the maximization of pavement conditions. Scenarios 1 and 4 show a similar trend in very good to good pavements. Scenario 4 considered the maximization of pavement condition states, while Scenario 1 treated all goals equally. Scenarios 6 and 7 show the worst performance, since these scenarios preferred maximization of skid states.
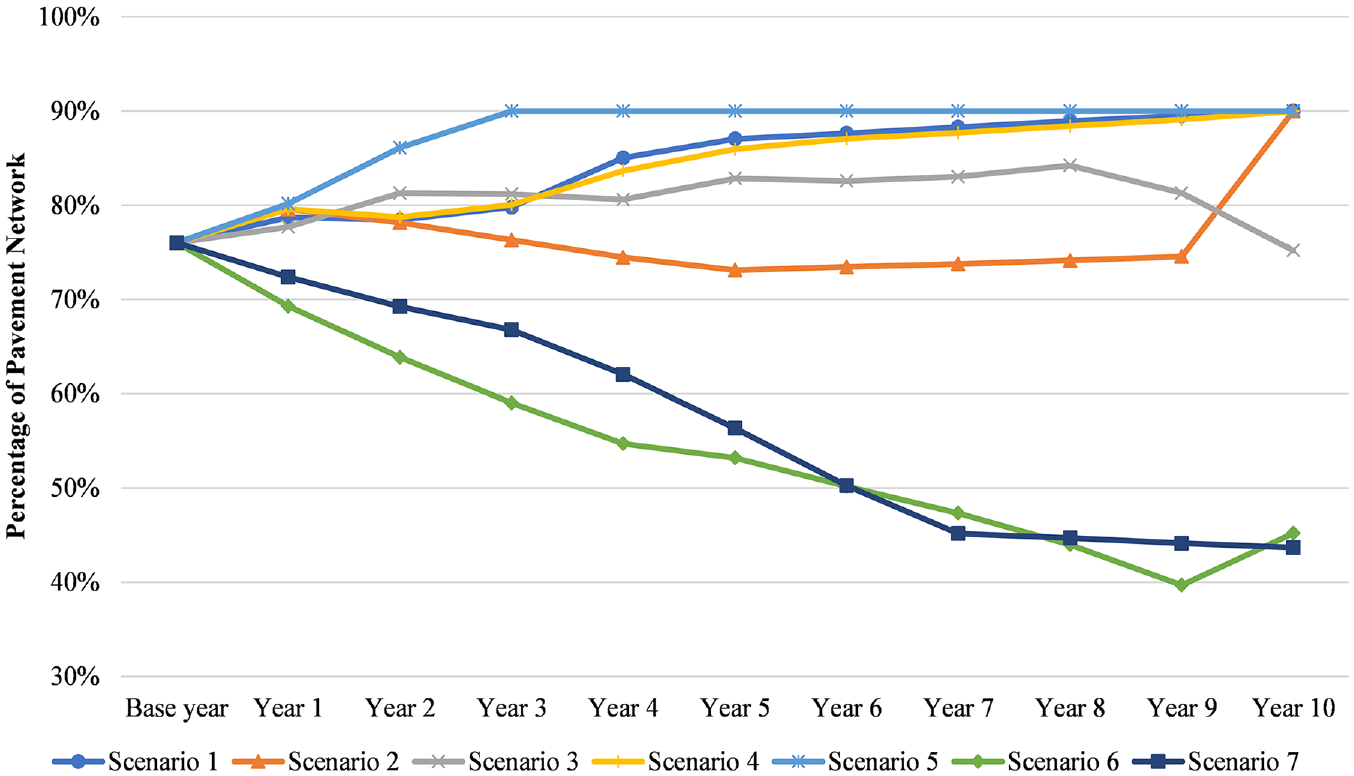
Percentage of pavement in very good and good pavement conditions over the planning horizon by scenarios.
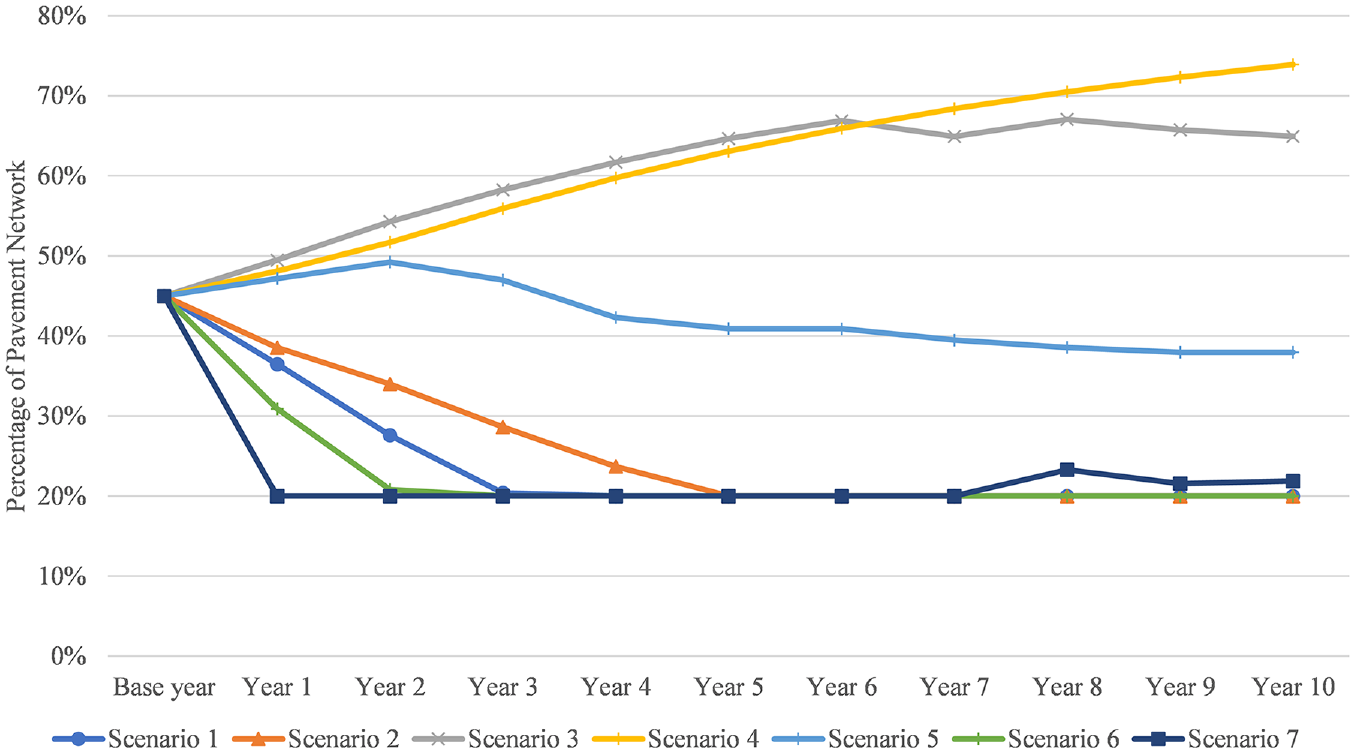
The results are also compared with respect to pavements in poor and very poor conditions. Figure 2 shows the relative performance of different scenarios. Scenarios 1, 2, 4, and 5 that placed some preference on the proportion of poor to very poor pavement achieved the target in the second year of the planning period. The proportion of poor to very poor pavements increases when preferences are placed only for optimization of pavement skid states (Scenarios 6 and 7). Scenario 3 minimized the treatment costs, which is reflected in the trend of poor to very poor pavements.
Percentage of pavements in very poor and poor pavement conditions over the planning horizon by scenarios.
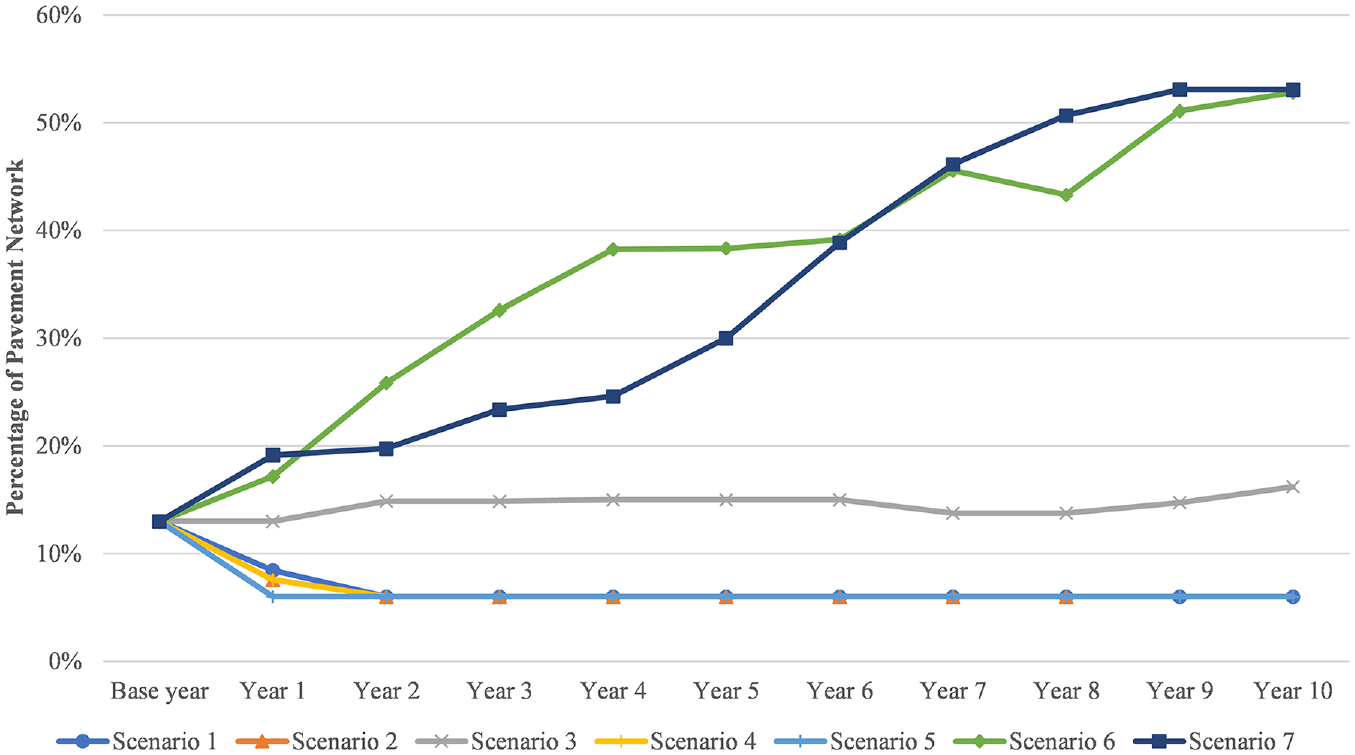
Figure 3 illustrates the performance of different scenarios with pavement skid states 1 and 2. Scenarios 1 and 7 denote similarity in the improvement of skid states 1 and 2, which reflect that when the optimization scheme considers skid states and treatment cost together, skid states 1 and 2 follow the same trend in achieving the target. Scenario 6 shows the expected performance for skid states 1 and 2 as this scenario considers the minimization of deviational variables for skid states only. Skid states 1 and 2 show underachievement because of the limited funds available in Scenario 3.
Percentage of pavements in states 1 and 2 of pavement skid resistance over the planning horizon by scenarios.
Performances of skid states 4 and 5 in different scenarios are presented in Figure 4. The proportion of states 4 and 5 outperformed in Scenarios 1, 2, 6, and 7, which is a desirable outcome. Skid states 4 and 5 significantly underachieved in Scenarios 3–5. In Scenarios 3 and 4, treatment cost goals affected skid state performance, and state 3 transitioned to state 4 or 5 rapidly. In addition, Scenarios 4 and 5 do not consider pavement skid states in their objective function, which coupled with stringent funds leads to poor skid states.
Percentage of pavements in states 4 and 5 of pavement skid resistance over the planning horizon by scenarios.
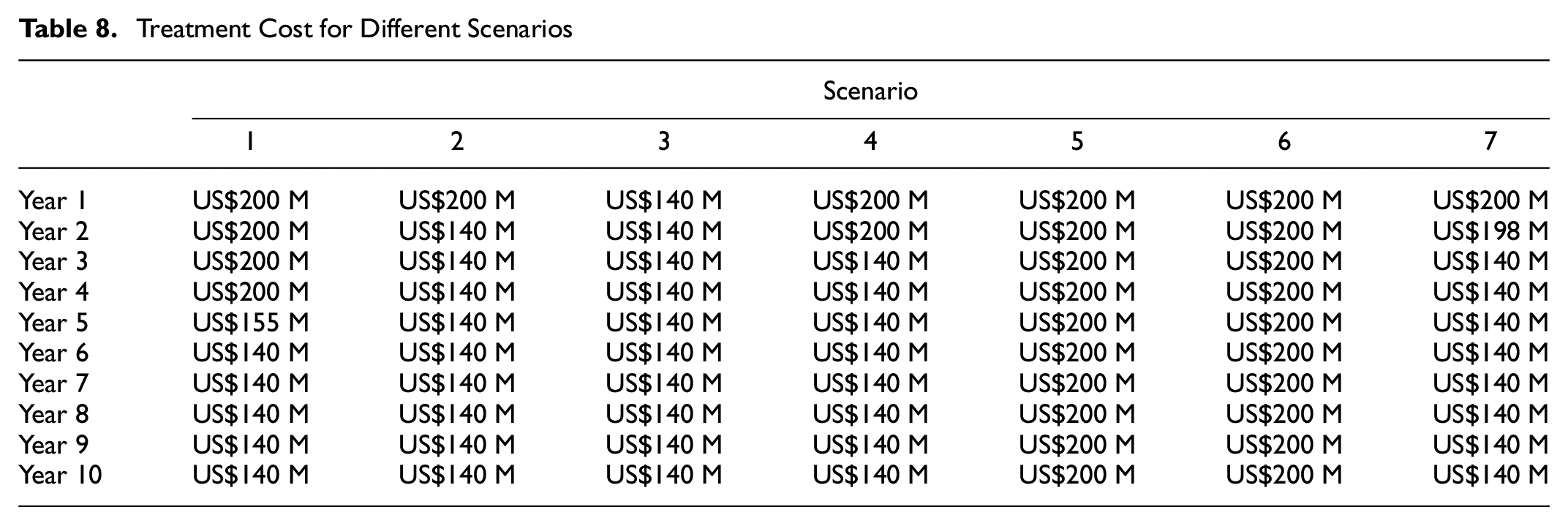
M&R treatment costs for different scenarios are presented in Table 8. It is seen from Table 6 that the treatment cost goal achieved the lower bound of the corresponding target, which is expected because deviations of treatment costs from targets are included in the objective function. For Goal 5, the lower the treatment cost the better. Goal 5 achieved the upper bound in the cases of Scenarios 5 and 6 because these scenarios incorporated only pavement condition deviations and skid state deviations in the objective function, respectively. Since more preference is placed on Goal 5 (minimization of treatment costs) compared to other goals in Scenario 2, treatment costs, in this case, are identical to those in Scenario 3 except in year 1. Since Scenario 2 considered other goals with fewer preferences, the model invested the maximum possible funds at the beginning of the planning period so that other goals achieved their targets at the end of the planning horizon. Scenarios 4 and 7 show identical trends in treatment costs; however, these scenarios show significant contrast in achievements between pavement conditions and pavement skids. Scenario 1 treated all goals equally, which was reflected in treatment costs. The model invested more funds in the early years to achieve the target and then tried to sustain the achievements with less funding. Therefore, there are tradeoffs among goals. Scenario 1 shows a better balance among the goals compared to other scenarios under the assumptions in this case study.
Treatment Cost for Different Scenarios
The model also provides the decision-maker with optimal M&R decisions for the network over the planning horizon. Figure 5 shows an example of a M&R decision developed by the model considering interaction among the goals and a range of multi-aspiration levels. Figure 5 shows the number of lane miles to be treated over the planning horizon by different treatment levels under the policy settings of Scenario 1. It is observed that the model relied on PM and PM-HFST under Scenario 1 since the model must tradeoff between the optimization of skid states and pavement conditions.
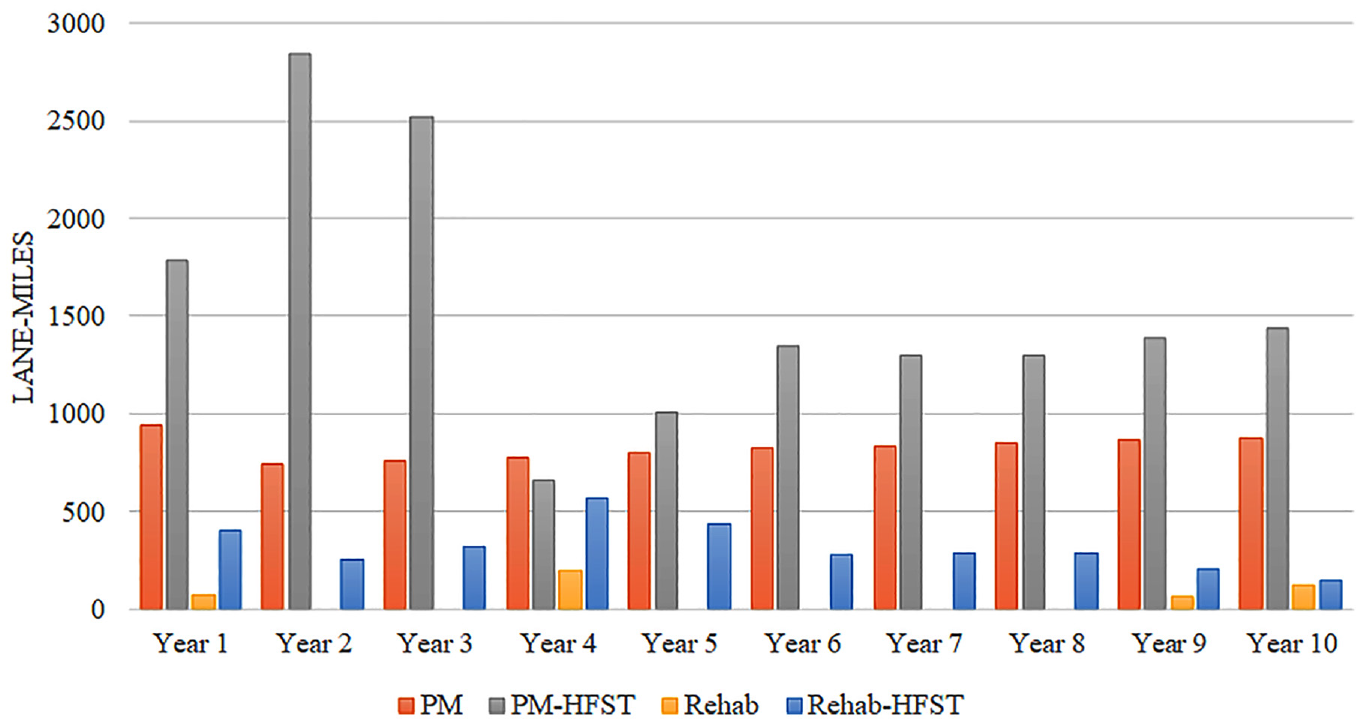
An example of maintenance and rehabilitation decisions for Scenario 1 (all goals are considered).
Conclusions
This study has presented an optimization model to manage pavement conditions coupled with the management of pavement skids at the network level. In this paper, the pavement management programming problem is formulated as a multi-objective optimization model to integrate multiple objectives. The study adopted a MCGP model to formulate the multi-objective model where each goal may have an interval of aspiration level rather than a fixed target. The model allows the decision-maker to choose uncertainty in target settings, which will help find the optimal pavement M&R schedule. In addition, the study incorporates a Markov chain-based state-space model for both pavement conditions and skid states. A numerical case study is presented to demonstrate the capability of the proposed MCGP model to manage pavement conditions and skids in an integrated manner. The proposed model results of the numerical example indicate the following.
The proposed model can manage pavement conditions coupled with pavement skids at the network level and can provide decision-makers with a more interactive strategic decision.
Surface treatments for skid improvement, such as HFST, can be fused with traditional pavement management treatments to improve both pavement conditions and skid states.
The objectives, goals, or both, can have different importance levels. The management of pavement conditions and pavement skids at the network level also depends on the relative importance chosen by the decision-maker.
The proposed model promotes integrated M&R decision-making. Therefore, the model can also help decision-makers obtain insight into the interaction of conditions, skid, and costs.
The proposed model can be easily adapted to provide a global solution.
The future scope of this study is to add features to improve the model through the integration of more strategic indicators.
Footnotes
Acknowledgements
The authors acknowledge guidance and support from the late Professor Zhanmin Zhang.
Author Contributions
The authors confirm their contribution to the paper as follows: study conception and design: M. Al Amin; data collection: M. Al Amin; analysis and interpretation of results: M. Al Amin, R.B. Machemehl; draft manuscript preparation: M. Al Amin, R.B. Machemehl. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.