
Abstract
The evaluation process for some roads safety strategies, especially innovative ones, may be challenging, as prior information may be non-existent. This challenge could be addressed with the use of surrogate measures, such as traffic conflicts. Statistical models relating crashes to conflicts are fundamental to this application. The aim of the paper’s research was to investigate some key issues related to the development and application of crash–conflict models. Among the issues addressed are the model specification, the very definition of conflicts, model transferability, and application of the models for estimating crash modification factors (CMFs). Issues are addressed with a case study in which traffic conflicts identified from both time to collision and post encroachment time are generated from the microsimulation of four-legged signalized intersections. These conflicts, in addition to the speed of conflicting vehicles, are used to explore the improved statistical relationships between the frequency of crashes and surrogate measures. Transferability of the models to another jurisdiction is also investigated. The results indicate that the inclusion of the speed variable along with conflicts provides stronger relationships than those with conflicts as a standalone variable. In particular, the results confirm the viability of estimating CMFs with the improved models. The transferability investigation results indicate that it is reasonable to apply the models to the other jurisdiction with caution. Importantly, where such an application is valid, a key conclusion is that calibration of the models would not be necessary to estimate CMFs and apply them to estimate the potential safety impact of a contemplated treatment.
Keywords
While road safety management has greatly benefited from statistical analysis crash data, it is established that crashes are a non-ideal source of information because of several analytical issues. Firstly, crashes are rare events, and it may take several years for enough of them to be recorded to meaningfully support the analytical methods applied in rational safety management. Secondly, it is likely that many non-injury crashes, and a portion of minor injury crashes, are not reported by police officers, resulting in an underreporting bias ( 1 ). Finally, crashes are also complex events that can result from an accumulation of several contributing factors, some of which may remain unobserved. These issues are the key motivation not only for the research for this paper but, significantly, for a major research project under the National Cooperative Highway Research Program (NCHRP 17-86) titled “Estimating Effectiveness of Safety Treatments in the Absence of Crash Data” (see: https://apps.trb.org/cmsfeed/TRBNetProjectDisplay.asp?ProjectID=4372).
Because of the limitations in the use of crash data for safety inferences, using non-crash traffic events can be highly beneficial in many situations ( 2 , 3 ). The term “surrogate safety measures” (SSMs) is used to refer to any such events that can be correlated with crashes. Traffic conflicts are the most widely used SSMs considered in highway safety analysis ( 4 , 5 ), and the most prevalent indicators of traffic conflicts are time to collision (TTC) and post encroachment time (PET). TTC was originally defined by Hayward ( 6 ) as “…the time that remains until a collision between two vehicles would have occurred if the collision course and speed difference are maintained.” As defined by Allen et al. ( 7 ), PET is the time between the moment that the first road user passes a certain point and the moment that the second road user reaches that point.
It is well established that a conflict-based crash model can be used to understand and predict crash frequency for intersections ( 5 , 8–12). In one of the more relevant studies ( 8 ), a two-phase model was proposed where a lognormal model is employed in the first phase to predict conflicts (with a TTC threshold of 1.5 s) at signalized intersections using traffic volume, area type (urban/suburban), and some geometric-related variables as covariates. In the second phase, a conflict-based negative binomial (NB) safety performance function was employed to predict collisions. The results indicate that the moderating effects of conflicts on collisions are non-linear with decreasing rates, with a 0.738% increase in predicted collisions for each 1% increase in predicted conflicts. In another related effort based on conflicts with a TTC threshold of 1.5 s, but this time derived from microsimulation, Saleem et al. ( 9 ) presented two different case studies to demonstrate the versatility of the conflict-based crash model. One involved the use of VISSIM microsimulation ( 13 ) with pre-calibrated default model parameter values to estimate conflicts, while the other case study involved the use of a Paramics model ( 14 ), this time with parameter values endogenously estimated. The resulting crash–conflict models, which were based on data for four-legged signalized intersections in Toronto and a TTC threshold of 1.5 s, had coefficient estimates for the conflict variables that were not only statistically significant, but were also remarkably similar in value.
Among studies modeling PET in crash–conflict relationships is that by Peesapati et al. ( 10 ) in which the effectiveness of PET from video analytics to predict crashes between left-turning and opposing movements at four-legged intersections was investigated. Results indicate that the PET threshold played a fundamental role in the correlation with crashes. A later study by the same research team ( 11 ) observed that the PET could capture other relevant characteristics of the intersection, such as sight distance and grade.
Conflict-based crash models typically do not include traffic, geometric, or operational characteristics as independent variables, the premise being that changes to these characteristics may affect conflict frequency, severity, or both, but not the relationship between crashes and conflicts. As a result, a crash–conflict model can be used to evaluate the changes in crashes resulting from a change in geometric and operational characteristics, in effect to estimate crash modification factors (CMFs) ( 15 ).
The objective of this paper is to build on the promise of previous related research in exploring issues in establishing relationships between different measures of traffic conflicts from microsimulation and crash frequency. This investigation is based on the microsimulation of four-legged signalized intersections in the City of Toronto to generate traffic conflicts identified from both the TTC and PET. The main points of departure of the current study are the investigation of speed as a predictor in conflict-based crash prediction models, and the use of microsimulation to derive those speeds. Speed measures have been proposed for defining the severity of conflicts and developing relationships with crashes, but the speeds and conflicts were derived from observations ( 4 , 16 , 17 ). For example, Anarkooli et al. ( 17 ) estimated models to relate left-turn opposed crashes to conflicts based on PETs and conflicting vehicle speeds all determined by video analytics.
The transferability of the proposed models to different jurisdictions is also explored, as is the applicability to estimating CMFs for contemplated treatments. These additional explorations are important for determining if the models can be considered, even without calibration, for universally estimating the potential safety impact of a contemplated treatment or treatment combination for which high-quality CMFs may not be available. Such an application, if deemed valid, would parallel the universal use of conventional crash prediction models with available CMFs in the Highway Safety Manual (HSM) ( 18 ).
Methodology
A sample of 91 four-legged signalized intersections in the City of Toronto was modeled in SYNCHRO software ( 19 ) by incorporating important aspects related to the road geometry, signal timings, and traffic volumes. The modeled intersections from SYNCHRO were saved as a comma-delimited file and then imported into PTV VISSIM software ( 20 ) to conduct the microsimulation. Another 13 signalized intersections in York region, about an hour’s drive from Toronto, were similarly modeled for the transferability investigation. Crash data for the modeling and transferability assessment were obtained from the City of Toronto and York region. Table 1 presents a summary of these data.
Summary of Crash Data
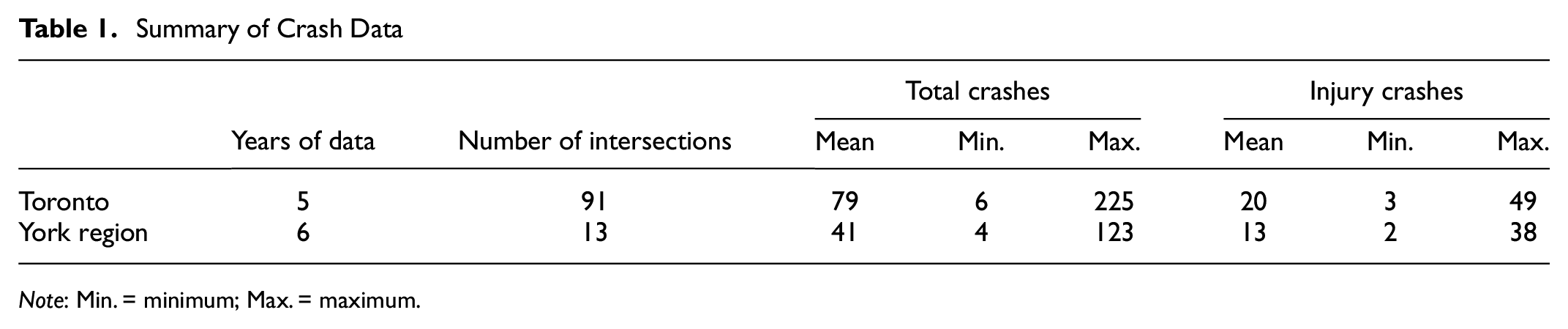
Note: Min. = minimum; Max. = maximum.
Ten random runs were simulated in VISSIM for 3600 s, representing the morning peak hour. After conducting the microsimulation, the outputs were saved in the form of vehicle trajectory files to be imported into the Surrogate Safety Assessment Model (SSAM) software package ( 21 ). SSAM yields the total number of conflicts and the number of conflicts per simulation run based on TTC and PET thresholds. Considering the range of thresholds used in previous research pertaining to urban signalized intersections and the resulting sample size of conflicts, PET thresholds of 5 and 2.5 s and TTC thresholds ranging from 1.5 to 0.5 s were deemed of interest for the investigation in this study. A TTC threshold of 1.5 s in effect represents the same number of conflicts as a PET of 5 s, since these values were set as the maximum thresholds in SSAM. Conflicts involving pedestrians and conflicts that occur beyond a 50 m radius of the intersection were filtered out. Thus, the investigation pertains to vehicle–vehicle conflicts only, and to those considered as intersection-related.
Crash–conflict prediction models relating crashes per year to conflicts estimated for a single peak hour were developed from 5 years of crash data at each of the 91 intersections using a generalized linear modeling (GLM) approach with the specification of a NB error structure. The dependent variable “crashes per year” was modeled using the total crashes in 5 years and using the number of years (5) as an offset variable. Independent variables investigated include the number of conflicts grouped by type—PET and TTC—and average and maximum speeds of conflicting vehicles. These models were developed with the SAS software package. The estimated NB overdispersion parameter was used predominantly as a goodness-of-fit (GOF) measure for comparative evaluation of various model options. The GLM approach is akin to that used for estimating crash frequency models, with exposure and site characteristics as independent variables.
The transferability of the models was assessed to determine whether the most promising conflict-based crash prediction models were suitable for calibration to the York region. The CALIBRATOR software tool ( 22 ) was used to assess the transferability. This software tool generates GOF tools and measures such as cumulative residual (CURE) plots, modified R2, mean absolute deviation (MAD), coefficient of variation (CV) of the calibration factor, and the overdispersion factor based on the calibration data.
Finally, as a follow-up to our previous research ( 15 ), the ability of the models to estimate CMFs was investigated by first estimating, from microsimulation, conflicts with and without a contemplated change at selected intersections. The estimated conflicts were then applied in the models to estimate crashes with and without the change, before calculating the CMF as the ratio of the two estimates.
Results and Discussion
Conflict Analysis
The number of simulated conflicts per run and the average and maximum speed of conflicting vehicles estimated for the City of Toronto signalized intersections are shown in Table 2 for various PET and TTC thresholds. These numbers confirm that the number of conflicts decreases as the PET and TTC threshold is decreased. The data represented in Table 2 were used to develop crash prediction models using surrogate measures such as the maximum and average speeds of the conflicting vehicles, TTC, and PET. The speeds are noticeably larger for the smaller TTC threshold, which is in accord with previous studies ( 4 , 22 ) that considered conflicts as higher risk when both the conditions of a low TTC and a high conflicting speed are met. Interestingly, a similar pattern for PET is not seen in the data in Table 2 and has not been revealed in any studies.
Conflict Statistics from SSAM for Various Time to Collision (TTC) and Post Encroachment Time (PET) Thresholds
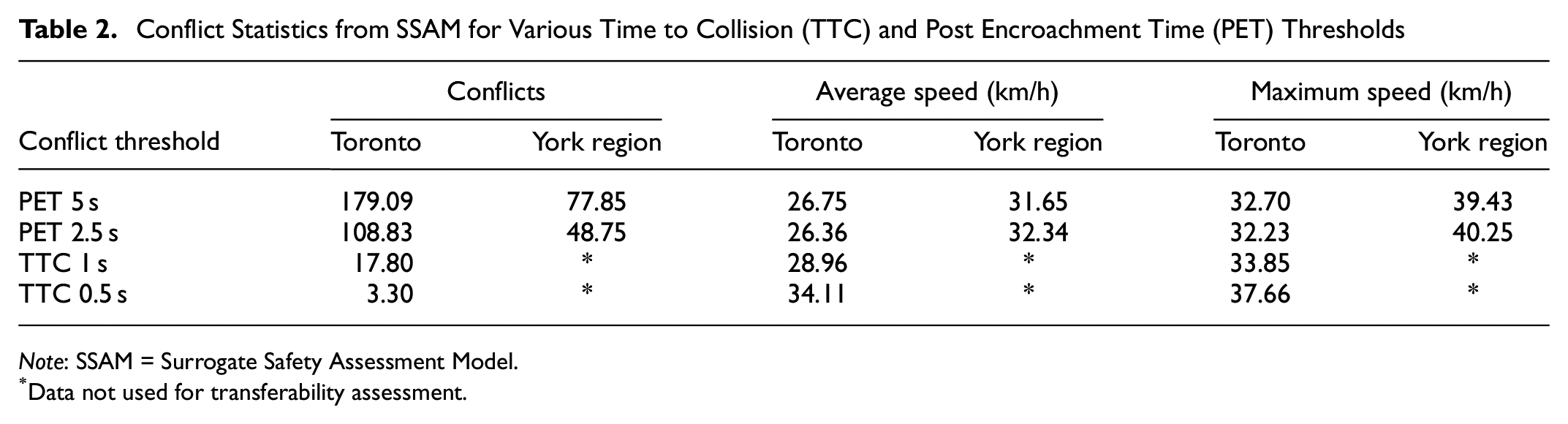
Note: SSAM = Surrogate Safety Assessment Model.
Data not used for transferability assessment.
As noted, CALIBRATOR software was then used to assess the transferability of the Toronto-based models to the York region. Also shown in Table 2 are the conflict statistics for the York region.
Crash–Conflict Models
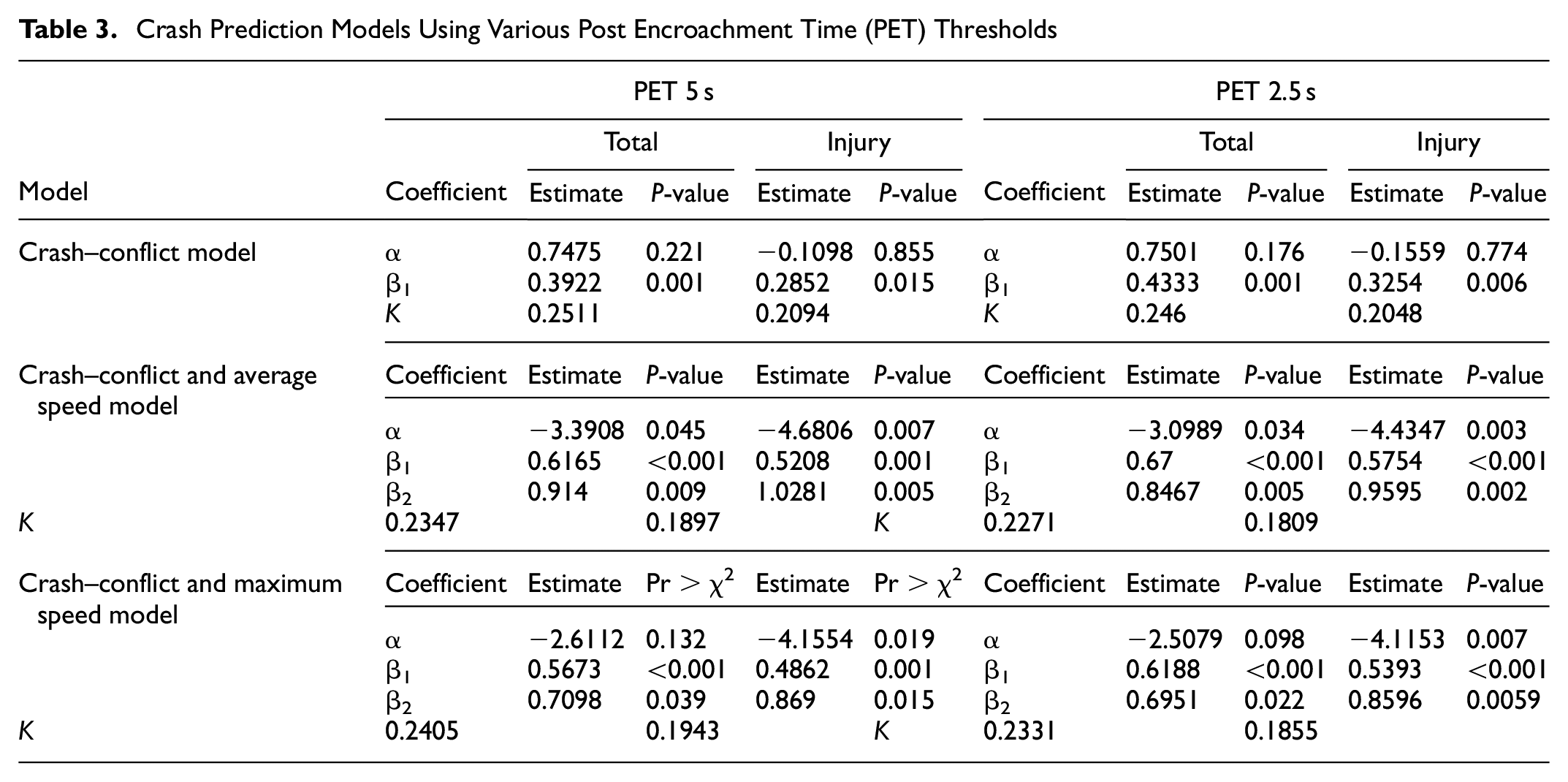
As noted earlier, the simulated conflicts extracted from the SSAM software and the crash data obtained from the City of Toronto were used in the development of the crash prediction models. Tables 3 and 4 present details of the crash prediction models developed for total and injury crashes. These relationships were estimated for the two sets of PET and TTC thresholds identified in Table 2. The model formulations for the results shown in Tables 3 and 4 are based on the following equations:



where Crashes pertains to the type of crash that is being modeled against, α is the estimate of the intercept,
Crash Prediction Models Using Various Post Encroachment Time (PET) Thresholds
Crash Prediction Models Using Various Time to Collision (TTC) Thresholds.
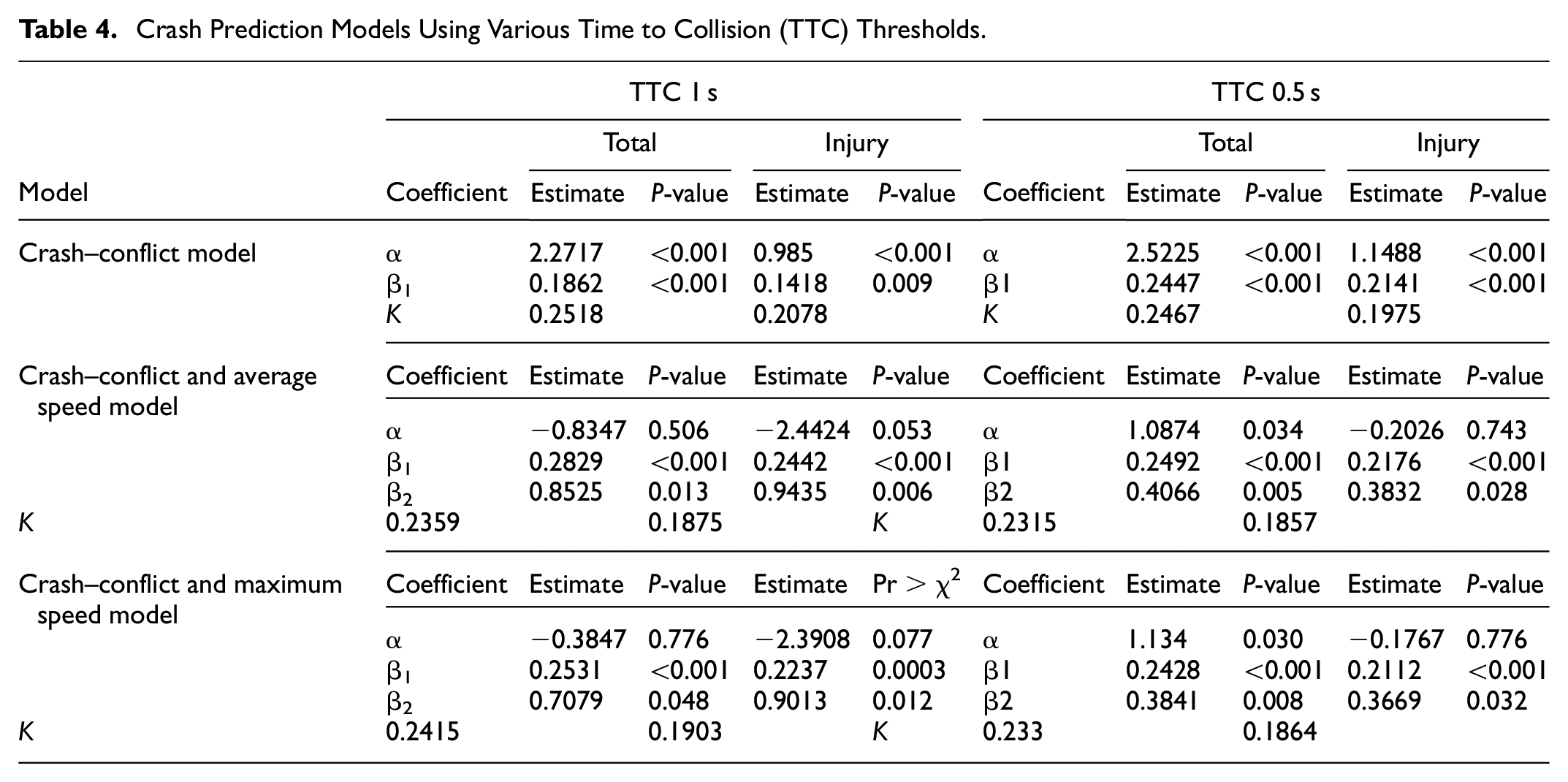
The following provides some insights based on the modeling results shown in Tables 3 and 4.
The coefficient estimates for all independent variables are significant at the 10% level or better. That reasonable models could be estimated is indicative of the adequacy of the sample.
The directions of the speed variable effect all indicate that crashes increase with an increase in speed.
Models that incorporate the PET threshold consist of a smaller dispersion parameter in all cases, and models with the 2.5 s threshold tend to be better by this measure than models with the 5 s threshold.
The addition of the speed variable (average speed and maximum speed) results in the dispersion parameter being slightly smaller for almost all cases in Tables 3 and 4. In the majority of these cases, the average speed variable tends to perform better than the maximum speed variable.
The addition of the speed variable (average speed and maximum speed) generally results in a stronger effect for conflict frequency. This disparity is much more pronounced for the PET models.
Six of the eight speed-based models in Tables 3 and 4 indicate a stronger effect of speed for injury crashes than for total crashes.
The indication from these insights is that the average speed models with the 2.5 s PET threshold are the most promising for this particular dataset and for the model formulations investigated.
The CURE plots shown in Figure 1 confirm the reasonableness of these models in that the residuals oscillate without significant biases and stay within the two standard deviation limits. These plots have been proposed as another GOF measure for assessing whether a fit is acceptable and in judging which of two fits is better ( 27 , 28 ).
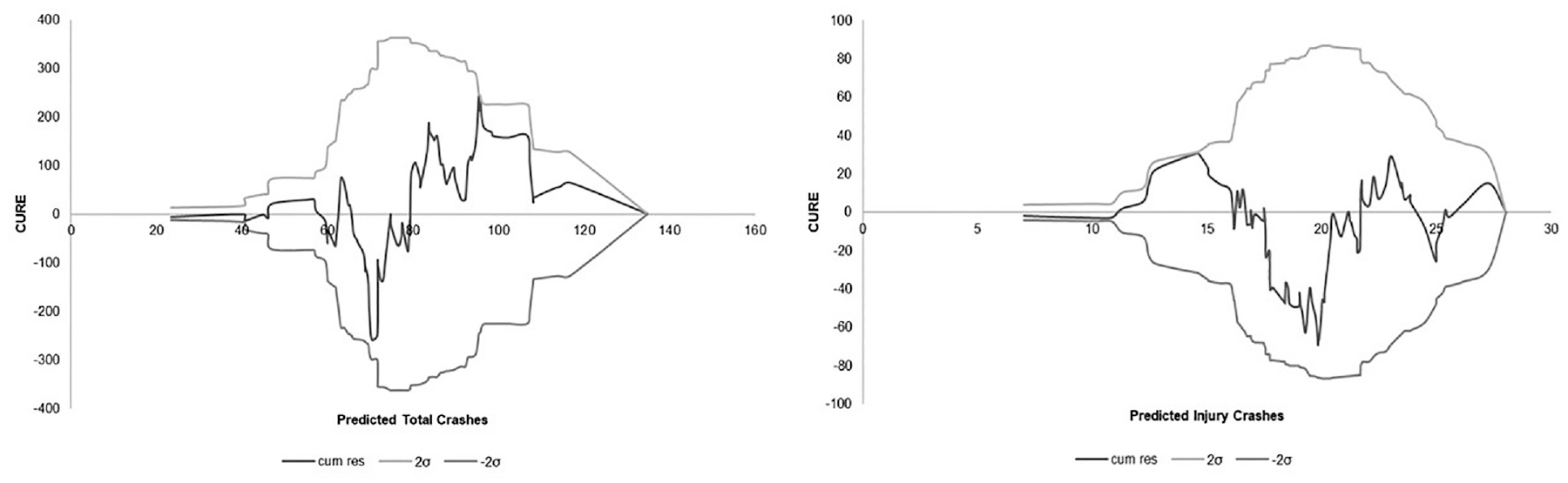
Cumulative residual (CURE) plots for models based on a post encroachment time threshold of 2.5 s.
Applicability to Estimation of Crash Modification Factors
Our previous research ( 12 ) found that the crash–conflict model can potentially be used to estimate CMFs for contemplated changes at a signalized intersection. As a follow-up, it was desired to investigate whether the improved models that incorporate speed can also be used for this purpose. For this exercise, CMFs for changing left-turn phasing from permissive to protected-permissive on multiple approaches at each of 10 Toronto intersections were estimated. The criteria used for selecting intersections were that the intersections should have at least one approach with an exclusive left-turn lane and that the level of service (LOS) and traffic volumes would justify consideration of protected-permissive signal phasing.
The phasing of the intersections was modified in Synchro and the simulation was performed in VISSIM. Based on the conflicts generated before and after the modification, the crash–conflict and average speed models with a PET of 5 s were used to estimate CMFs for total and injury crashes using the following equations, which are based on the coefficient estimates in Table 3:


The results are shown in Table 5.
Estimated Crash Modification Factors (CMFs) for Hypothetically Changing Left-Turn Phasing from Permissive to Protected-Permissive at 10 Toronto Intersections
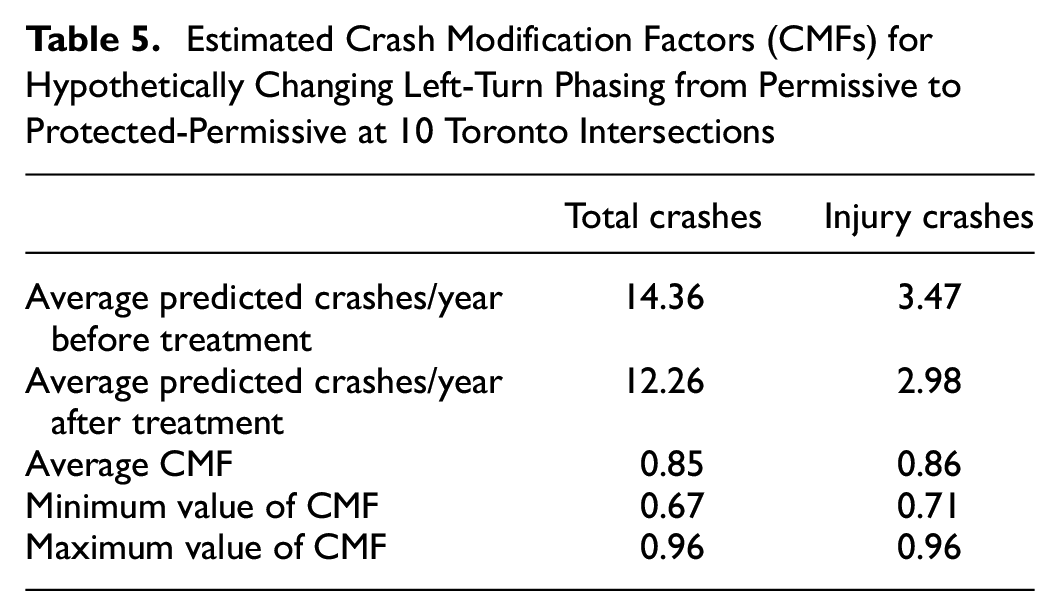
These results confirm the viability of estimating CMFs with the improved crash–conflict models incorporating conflicting vehicle speeds in two respects. Firstly, they affirm the validity of the fundamental assumption with the overall approach that conflicts and speeds are logically affected by geometric and operational changes and not only by traffic exposure. Secondly, the CMF estimates are reasonably consistent with those from an empirical Bayes before–after study ( 29 ) for intersections in Toronto for which the left-turn phasing was changed from permissive to protected-permissive. That study estimated CMFs of approximately 0.945 and 0.878 for total and injury crashes, respectively, at the 12 intersections with more than one treated approach. For the crash-based CMF, rigorous CMFs could not be estimated for individual sites, but this variability was reflected in the estimation of the standard deviations of the distribution of the CMFs (σ), which had values of 0.174 for total crashes and 0.114 for injury crashes. These values of σ are consistent with the CMF range for the conflict-based CMFs.
Notably, it was possible to estimate a CMF that was unique to each intersection, in effect mimicking the application of a crash modification Function. This is a key advantage of this approach for estimating CMFs even when crash-based CMFs based on aggregated data for several treatment applications are available. By extension, the approach could also be beneficially applied for estimating CMFs for treatments applied in combination. This would be an improvement over the current procedure in the HSM ( 15 ) of simply multiplying together CMFs for the individual treatments, a procedure that is widely believed to be flawed. (It should be noted in passing that the NCHRP Project 17-63 final report [ 30 ] has proposed updated procedures for estimating a CMF for a combination of treatments, but these have not been widely tested and are they are yet to be implemented in the HSM.)
Transferability Assessment
The transferability of these models to another jurisdiction (York region) was assessed using the CALIBRATOR software tool ( 31 ) to calibrate the models to data for 13 intersections for which 6 years of crash data and conflicts and speeds from microsimulation were obtained. This software tool calculated a calibration factor that is applied as an additional multiplier in Equations 1–3 and is estimated as the ratio of the sum of crashes observed at the 13 intersections in the York region to the sum of the predictions using the Toronto models and the conflicts estimated from the microsimulation of these intersections. Also estimated by the tool were various GOF measures to assess whether the crash prediction model would be suitable or not. These measures include the MAD, modified R2, the variance (V[C]) and CV (CV[C]) of the calibration factor, CURE plots and associated measures—the maximum CURE deviation and the percentage of residuals with deviation outside the two standard deviation limits, Akaike information criterion (AIC), and Schwarz Bayesian information criterion (BIC).
Table 6 shows the calibration results for the York region. It should be noted that the models with a PET threshold were used to assess the transferability, since, as noted above, these models captured the information better in comparison to the models with a TTC threshold.
York Region Transferability Results
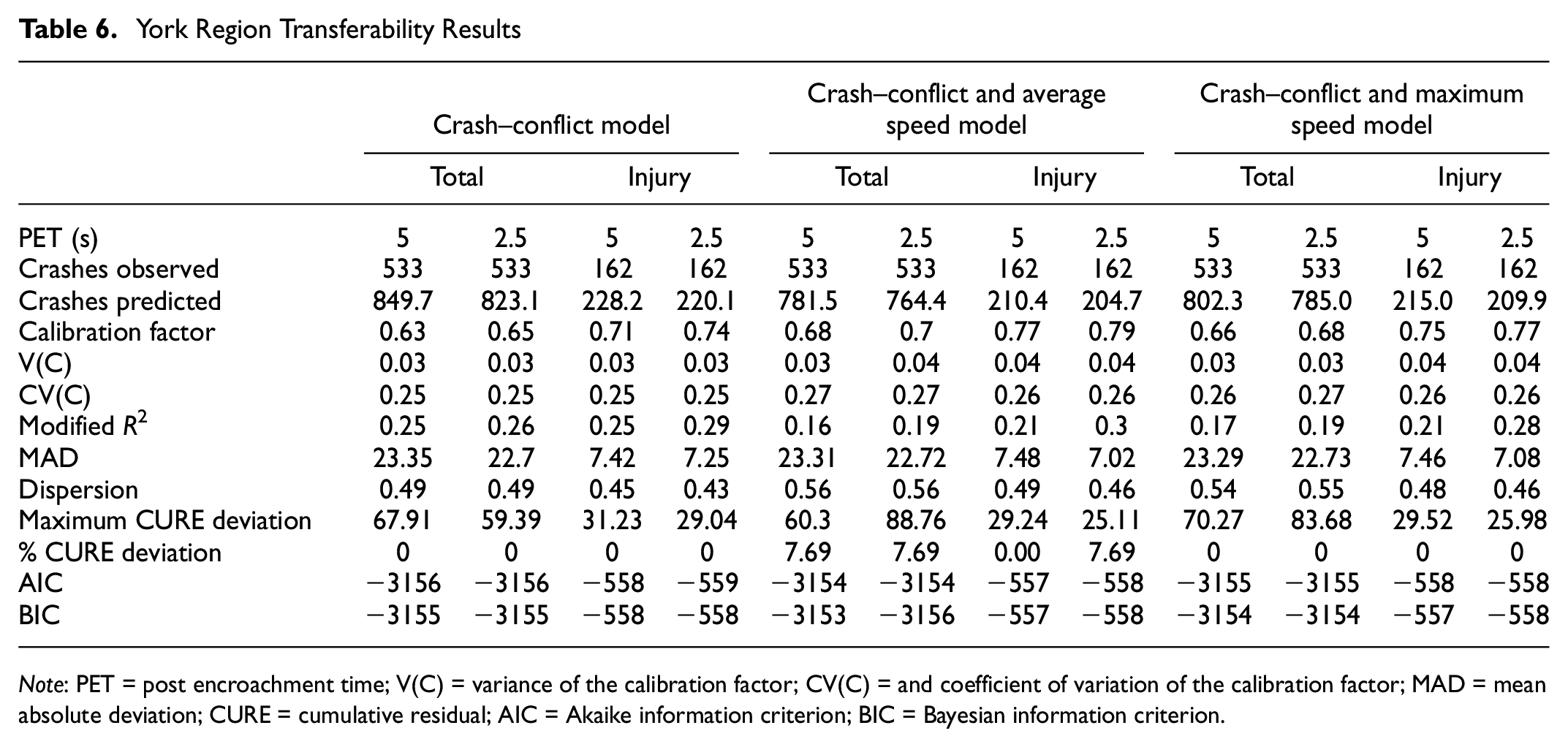
Note: PET = post encroachment time; V(C) = variance of the calibration factor; CV(C) = and coefficient of variation of the calibration factor; MAD = mean absolute deviation; CURE = cumulative residual; AIC = Akaike information criterion; BIC = Bayesian information criterion.
The following provides some insights pertaining to the results shown in Table 6.
The calibration procedure produced similar results for PET thresholds of 5 and 2.5 s.
The GOF measures indicate that the crash–conflict models without a speed variable performed best with respect to transferability. The transferability of these and almost all of the other models can be deemed acceptable in satisfying the condition in the CALIBRATOR user guide that “five percent or less of CURE plot ordinates for fitted values (after applying the calibration factor) exceed the 2σ limits” ( 31 ).
Satisfactory results were obtained with a relatively small calibration dataset of 13 intersections, which is encouraging.
That it seems reasonable to transfer the Toronto models to another jurisdiction is an important and promising finding, in that if the models can be universally applied, they can be considered, even without calibration, for universally estimating the potential safety impact of a contemplated treatment or treatment combination for which high-quality CMFs may not be available. That the models may be applied without calibration is a result of the multiplier and calibration factors for Equations 1–3 cancelling out when the CMF is estimated, as is evident in Equations 4 and 5. Then, in accordance with the procedures in the HSM ( 18 ), for any jurisdiction for which the models can be deemed transferable, the CMF so determined can then simply be applied to a crash-based empirical Bayes estimate of the expected number of crashes that would have occurred without the treatment to estimate the potential safety impact of a contemplated treatment.
Conclusions
The research investigated some key issues related to the development and application of crash–conflict models for safety assessments. Among the issues addressed were the model specification, the very definition of conflicts, model transferability, and application of the models for estimating CMFs. Issues are addressed with a case study in which traffic conflicts based on both the TTC and PET were generated from microsimulation for four-legged signalized intersections in the City of Toronto. These vehicle–vehicle traffic conflicts, in addition to speed of conflicting vehicles, were used to develop and explore the improved statistical relationships between frequency of crashes and surrogate measures. The addition of the speed variable (average speed and maximum speed) generally results in a stronger effect for conflict frequency. This disparity is much more pronounced for the PET models, which tended to perform better than models based on the TTC. In addition, the speed-based models tended to indicate a stronger effect of speed for injury crashes than for total crashes. In general, these results, although unique in the sense that they are pertinent to microsimulation-derived conflicts, are consistent with those for the few studies that included speed as a predictor of crashes in addition to conflicts obtained from observation.
A further exercise confirmed the viability of applying the improved models that incorporate speed for estimating CMFs in that the results are reasonably consistent with those from an empirical Bayes before–after study for intersections in Toronto for which the left-turn phasing was changed from permissive to protected-permissive. Importantly, it was possible to estimate a CMF that was unique to each intersection, in effect mimicking the application of a crash modification Function, which is typically challenging to estimate in crash-based studies. By extension, the approach could also be beneficially applied for estimating CMFs for treatments applied in combination, which would be an improvement over the current procedure in the HSM.
Transferability of the models to another Canadian jurisdiction was also investigated by estimating calibration factors and assessing the GOF. The results of this exercise indicate that it is reasonable to apply the Toronto models to the other jurisdiction with caution. This is an important and promising finding, in that if the models can be universally applied, they can be considered, even without calibration, for universally estimating the potential safety impact of a contemplated treatment or treatment combination for which high-quality CMFs may not be available.
The paper was somewhat limited in scope to an investigation of some key issues related to the development and application of crash–conflict models for safety assessments. To actually develop such models for specific applications, more research will be needed to, for example, explore additional speed measures such as the difference in speed of conflicting vehicles for rear-end conflicts. Such research should also consider modifications to the VISSIM car-following parameters to potentially optimize the crash–conflict models.
Footnotes
Acknowledgements
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: Bhagwant Persaud, Thanushan Rajeswaran; data collection: Thanushan Rajeswaran; analysis and interpretation of results: Thanushan Rajeswaran, Bhagwant Persaud, Alireza Jafari Anarkooli; draft manuscript preparation: Alireza Jafari Anarkooli, Bhagwant Persaud, Thanushan Rajeswaran. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research was funded by a Discovery grant from the Natural Sciences and Engineering Council of Canada (ApplID RGPIN-2017-04457).