
Abstract
With the widespread application of unmanned aerial vehicles (UAVs), flight safety issues have gradually become prominent. To improve the safety level of UAV flight, a conceptual model was constructed through groups of unsafe behaviors of UAV flight based on the Swiss cheese model (reason model). The relationship network model of unsafe behaviors of UAV flight was built after using the two-mode and one-mode social network analysis, and the unsafe behaviors of UAV flight influence mechanism were studied by basic characteristics of network analysis, centrality analysis, core-periphery structure analysis, in/out-degree analysis, and structural hole analysis. The results showed that the two-mode network is closely related: unreasonable safety management structure of the organization and weak supervision of UAV flight operation were those unsafe behaviors of UAV supervision that had great influence. The unsafe behaviors of UAV supervision, such as the organization’s illegal deployment of unqualified personnel for tasks and lack of ground commander for the mission plan, were in the core position of the network. The proposed model can effectively reduce the unsafe behaviors of UAV operations by eliminating critical unsafe behaviors of UAV supervision in the network and reducing UAV flight accidents.
Keywords
The application of unmanned aerial vehicles (UAVs) brings a certain degree of convenience to people, and it can even be necessary for some fields, for example, medical flights in Africa, North America, and so forth. However, this benefit is accompanied by certain risks because unnecessary accidents and incidents can cause serious injuries and interrupt other aerial activities. Usually, the UAVs that cause disturbances are personal UAVs. Because the airport clearance area is an open area, it has become one of the popular areas for UAV operators, especially the operators of individual UAVs. But it is also the main reason that the airport clearance areas are the places where accidents with UAVs are prone to occur. Unsafe UAV fight behaviors have a serious impact on people’s normal life, resulting in huge economic losses ( 1 ). The research of Haslam et al. shows that unsafe human behaviors are the main cause of safety accidents ( 2 ). Therefore, an in-depth study of unsafe human behaviors is of great significance for reducing the incidence of UAV accidents and improving the level of UAV flight safety.
In December 2014, a UAV hit a photographer who was reporting on UAV operations ( 3 ). In October 2016, a civilian UAV in Ningbo, Zhejiang Province, China, lost control and hit a truck on the highway, injuring two people. In April 2017, two UAVs broke into Chengdu Shuangliu International Airport, causing 58 flights to wait for landing and four flights to return. On January 25, 2021, at Chaotianmen, Chongqing, hundreds of UAVs performing in formation suddenly lost control and crashed into a building at the same time, and about a hundred UAVs crashed. In addition, there are many reports stating that the wrong UAV operations will cause damage to the UAV or the environment. This research aims to draw lessons from past UAV accidents and incidents, find out the key influencing factors of unsafe UAV behaviors, and provide effective safety management recommendations, which can ultimately help policymakers design effective policies to regulate UAV operations, reducing the occurrence of UAV safety accidents.
The supervision of UAV operations is a multifaceted issue because implementing any restriction will negatively affect the UAV market’s development and hinder all its potential social and economic benefits ( 4 ). However, it has become increasingly apparent that UAVs and traditional aircraft industries face different risk sources, therefore risks need to be specifically managed ( 5 ). Although some countries have made initial attempts, no universally accepted standard exists to promote and supervise non-military UAV operations. Besides, there is significant room for improvement in the current regulations in China. Further clarification is needed for a series of key issues such as airworthiness certificate, liabilities and insurance, pilot licensing, and accident reports ( 6 – 9 ).
The scarcity of data and the inconsistency of research styles form an important obstacle to the analysis of unsafe behaviors of UAV flights ( 9 ). Based on the analysis model applicable to aviation accidents caused by human factors, namely the Swiss cheese model (reason model), this study classifies the unsafe behaviors of UAV flights according to unsafety level and category. At the same time, the two-mode social network analysis (SNA) method is innovatively used to study the influence mechanism between different types of unsafe behaviors, and to find out the key factors among them, thus providing a theoretical basis for the safety management of UAV flights.
A UAV is defined by the International Civil Aviation Organization (ICAO) as an aircraft that operates without a pilot on board ( 10 ). The unmanned aircraft system (UAS) commonly refers to a system which makes the UAV work, that is, the UAV, the person who is controlling it, and the system in place connecting them. It is worth noting that UAV can also refer to autonomous UAVs. In this paper, “drone” and “UAV” are used interchangeably to refer to unmanned aircraft.
The application of drones has expanded from the military field to the commercial field, such as 3D mapping, infrastructure maintenance, disaster management, safety, and agriculture ( 11 – 17 ). The widespread use of UAVs is mainly because of the equipment installed that can complete many important tasks. UAVs can use high-resolution lenses to identify high-risk areas as well as assess damage. UAVs can automatically monitor crops on large farms ( 18 ). UAVs can perform monitoring of infrastructure to determine the state of assets and greatly reduce budgets ( 19 ). In safety management, UAVs are used to extract data from traffic videos to detect safety-related anomalies for risk assessment ( 20 ). UAVs have promoted the development of multiple applications, such as sensing, smart cities, surveillance, disaster management and recovery, patrolling, aerial surveys, and border security ( 14 , 21–24). UAV technology is becoming more and more popular and is expected to be more widely used in the future. The Federal Aviation Administration (FAA) predicts that in 2021, the number of UAV consumers will amount to 3.55 million.
With the wide application of UAVs in various fields, there is more and more research on UAV flight issues. Most of the academic research on UAVs is devoted to its technical aspects ( 25 – 27 ). In relation to UAV flight risks, Ghasri and Maghrebi have discussed real accidents caused by UAVs and explored the potential safety hazards during UAV flights ( 1 ). Few of these research results are based on human factors to discuss the relationship between unsafe behaviors of UAV flights and their solutions, and it is clear that the analysis of the internal impact relationship between unsafe behaviors of UAV flights can improve the safety of UAV flight. Although useful and versatile, UAVs can have disastrous consequences if we ignore the safety regulations around them. If preventive measures are not taken, the safety issue will become more and more serious.
The safety issues of UAVs include any accidents involving UAVs. Wild et al. believe that unmanned and manned aircraft face different risk sources and must be treated separately ( 5 ). Safety can be defined as “the state where the system has no danger or risk, no harm or loss” ( 28 ). The risks of UAV flight need to be studied in depth, which may endanger the safe execution of UAV missions ( 29 ).
The increasing number of safety accidents and incidents also clearly shows the limitations of today’s safety methods ( 29 ). Therefore, if the potential risks of using these UAVs are not clear, it is impossible to publicly use civilian UAVs at an acceptable level of safety.
Theoretical Analysis of Unsafe Behaviors’ Relationships
Classification of Unsafe Behaviors of UAV Flight
The unsafe behaviors of UAV flight refer to the behaviors causing UAV flight accidents resulting from environmental and human factors. The Swiss cheese model is considered to be a framework for flight safety management and is suitable for analyzing aviation accidents caused by human factors. The model involves four levels: organizational influence, unsafe supervision, preconditions for unsafe behaviors, and unsafe behaviors themselves ( 30 ). It is based on the idea that, when defects are at all levels simultaneously, light can pass through the cheese, causing accidents ( 31 ). This paper mainly discusses the relationship between unsafe UAV supervision and unsafe UAV operation. Unsafe UAV supervision refers to the wrong behaviors related to the safety of UAV flight during the supervision process, which can include the organizational influence and unsafe supervision in the Swiss cheese model. Organizational influence is an invisible factor ( 32 ). It does not directly cause UAV accidents but is the potential root cause of UAV accidents. It is mainly related to the management of UAV flights. Unsafe supervision is specifically manifested in insufficient supervision, which may occur before the UAV takes off and during the UAV flight process. Unsafe UAV operation refers to the incorrect behaviors related to safety activities made by the UAV operator during the actual operation of the UAV. It can include the preconditions for unsafe behaviors and unsafe behaviors in the Swiss cheese model. The preconditions for unsafe behaviors are the direct prerequisite for accidents, and effective control of them can reduce the occurrence of UAV flight accidents to a certain extent. Reducing unsafe behaviors during UAV operations can directly reduce the probability of UAV flight accidents.
Unsafe UAV Supervision
In the Swiss cheese model, organizational influence and unsafe supervision are the two primary levels that cause accidents. Resolving unsafe factors in these two levels is very helpful in controlling preconditions for unsafe behaviors and the unsafe behaviors themselves. The power held by factors of unsafe UAV supervision reflects their influence. “Power” here refers to the ability of a certain factor to affect other factors to achieve the goal without considering the resistance ( 33 ). In the process of resolving various unsafe behaviors of UAV supervision, the more critical behaviors have greater power ( 34 ). Resolving the unsafe factors of UAV supervision with high power can affect other factors, thereby promoting the resolution of unsafe factors in UAV operation and improving flight safety. Unsafe supervision factors involve multiple aspects, including unclear authority and responsibilities of the subjects of the organization, weak oversight of UAV flight operations, and lack of ground commanders for UAV missions ( 35 ). The greater the influence of these unsafe supervision behaviors, the more they can promote the resolution of unsafe UAV operations.
Unsafe UAV Operations
In the Swiss cheese model, preconditions for unsafe behaviors and the unsafe behaviors themselves can be regarded as unsafe UAV operations. Currently, UAV flight may have the problem of insufficient preparation by the UAV operator ( 36 ). For example, the operator does not plan the flight route or apply for flight before the flight, which leads to UAV flight disorder, greatly reducing the flight efficiency and flight safety of UAVs ( 35 ). This reflects the attitude of UAV operators not paying attention to unsafe flying behaviors and not being vigilant. Once encountered in a harsh environment, it will greatly increase the flying risk of UAVs and cause accidents. In addition, as a result of China’s lack of training for operators to correctly avoid accidents and respond to emergencies, UAV operators lack the ability to respond to emergencies, which increases the probability of flight accidents. Also, the inherent flaws in the UAV operating system itself further increase the flight risks of UAVs ( 37 ).
Social Network Analysis (SNA)
SNA first appeared in the 1930s ( 38 ). It is a quantitative analysis method, with three theoretical branches: strong-weak ties theory, structural hole theory, and social capital theory ( 39 – 43 ). SNA has been widely used in natural sciences, sociology, statistics, psychology, economics, business management, and organizational management ( 44 , 45 ).
SNA plays a significant role in analyzing the relationship between objects ( 46 ). Many scholars have recently used SNA to study the relationship between unsafe behavior factors ( 47 ). However, the one-mode SNA has certain limitations in analyzing the relationship between different types of behaviors, and the two-mode SNA can more deeply reflect the influence mechanism between different types of behaviors ( 48 ).
In this paper, we focused on the influencing factors of unsafe behaviors of UAVs. Based on the Swiss cheese model—an analysis model that is suitable for aviation accidents caused by human factors—we classified unsafe behaviors of UAV flights by level. At the same time, the two-mode SNA method was innovatively used to study the influence mechanism between different types of unsafe behaviors, and to find out the key factors among them, thus providing a theoretical basis for the flight safety management of UAVs, which is helpful to the safety management of UAVs.
Methodology
Relationship Model of Unsafe UAV Behaviors
A one-mode social network is composed of relationships within a set of actors and only considers the relationships between nodes of the same kind. However, the two-mode social network is composed of the relationship between two different factors, and it can explore the relationship between the two different factors ( 36 ). Through two-mode network analysis, the status and characteristics of unsafe UAV supervision and operation behaviors in the network can be intuitively analyzed. In the social network, the unsafe behaviors of UAV supervision with great power are an important node of the network, which can affect the functional structure of the network and other supervision behaviors. At the same time, it is convenient to address these behaviors to resolve unsafe UAV operations further. Therefore, to clarify the actual influence of unsafe behaviors on UAV supervision and ensure the safe flight of UAVs, it is necessary to analyze the power and positions of such behaviors in the network in combination with the social network.
To sum up, the conceptual model diagram of the relationship between unsafe behaviors of UAV supervision and unsafe behaviors of UAV operation was established, as shown in Figure 1.
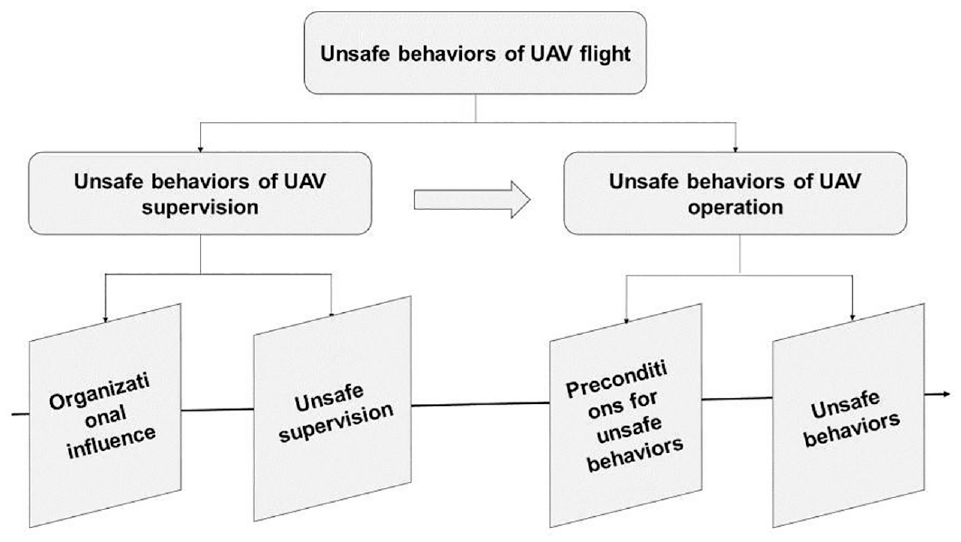
Concept model for relations between groups of unsafe behaviors.
Questionnaire Survey and Data Collection
According to the previous classification discussion on unsafe behaviors affecting UAV flight and the relational conceptual model in Figure 1, some methods, namely literature review, the snowball rolling method, and questionnaire, were used on the basis of confirming unsafe UAV supervision and operation behaviors, so as to determine the influence of such behaviors.
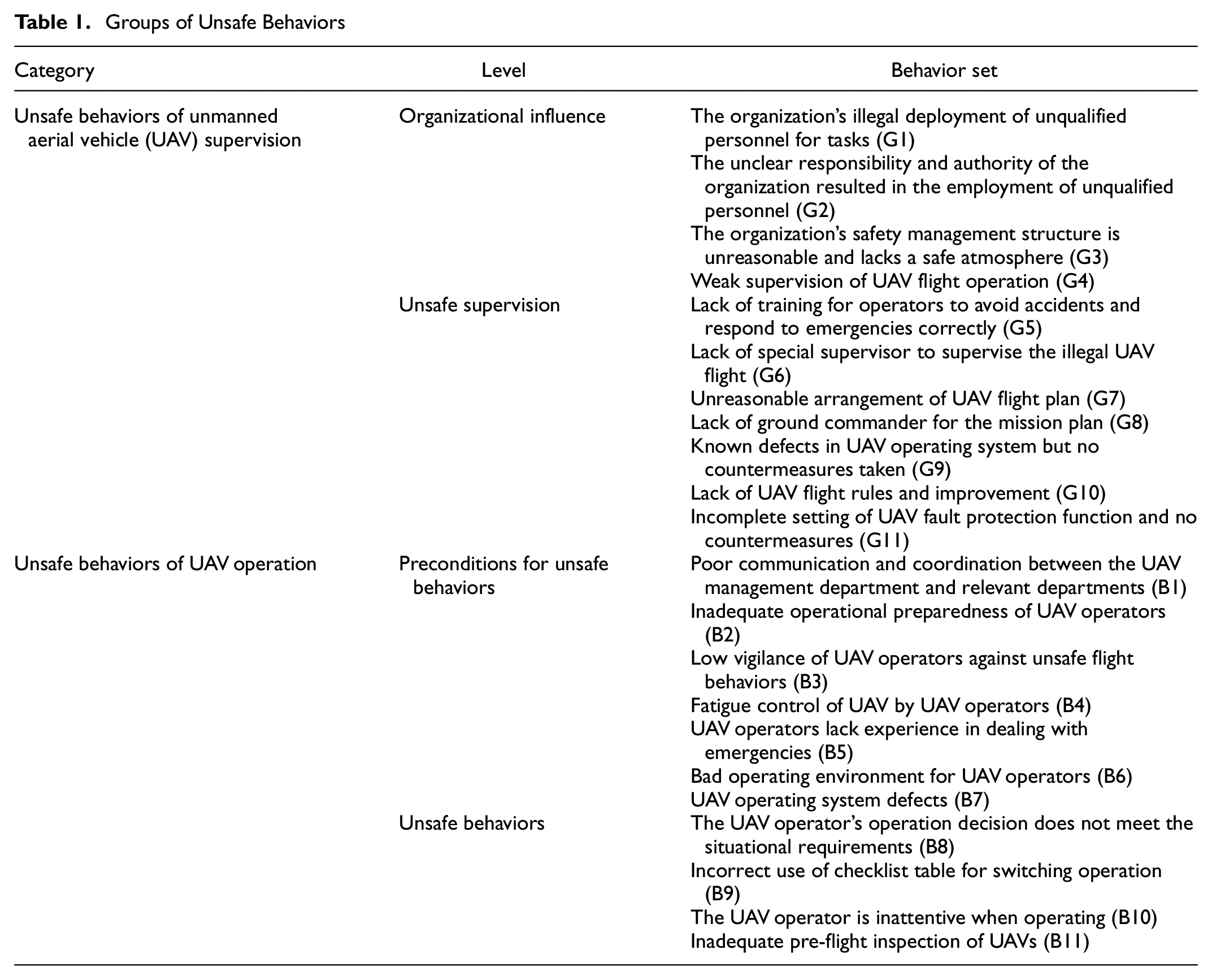
Based on the cognitive investigation of the influencing factors of unsafe behaviors of UAV flights and the relevant laws, regulations, and documents at home and abroad, 25 influencing factors of unsafe behavior were screened and summarized as the original basis. By contacting the staff engaged in safety management and experts in the field of safety management in the UAV industry, the snowball method was combined for investigation. A total of 37 experts were involved in the survey, including UAV safety management experts, flight-related operation and management personnel, and experts in the field of safety management, including both men and women, aged between 25 and 50 ( 10 , 27 ). The snowball method requires respondents to have work and research experience related to the survey topic. After the experts and staff invited to participate in the investigation started, they were asked to nominate another senior person with rich knowledge and experience to fill out the questionnaire, and so on. Then, the investigation results were sorted out and summarized, and 22 unsafe behaviors were obtained. According to the four levels of the Swiss cheese model, the screened unsafe behaviors were classified: four unsafe behaviors related to organizational influence and seven unsafe supervision behaviors were obtained, with a total of 11 unsafe supervision behaviors. There are seven unsafe behavior preconditions and four unsafe behaviors, with a total of 11 unsafe operation behaviors, as shown in Table 1. Then, the respondents were asked to quantify the influences by answering two questions about the likelihood of the influence happening and the intensity of the influences. We used the Likert scale to represent the answer, where “5” meant the highest standard and “1” meant the lowest standard. When no influence exists between two nodes, the influence level is zero. The final value of influences was obtained by multiplying the two answers. Then, we averaged the respondents’ results and obtained the final value, which showed the influences among the factors.
Groups of Unsafe Behaviors
Data Analysis and Results
Two-mode and one-mode social networks were both used to analyze the relationship between unsafe behaviors of UAV supervision and unsafe operation behaviors, as well as the relationship between the two unsafe behavior factors in this article, so as to find out the important factors affecting unsafe UAV behaviors and guide the UAV safety management.
Two-Mode Social Network Analysis (SNA)
In this research, the unsafe behaviors of UAV supervision can be regarded as important nodes of the network, which can affect the functional structure of the network. The unsafe behaviors of UAV supervision with great power can have an impact on other UAV supervision behaviors, so it can be used to analyze and resolve the unsafe behaviors of UAV operation.
1. Centrality analysis
1) Degree centrality. Degree centrality measures the number of nodes directly connected with a certain node and only pays attention to the node’s power. In the network of unsafe UAV supervision and operation behaviors, this means that unsafe behaviors of UAV supervision have the power to resolve the corresponding number of unsafe operation behaviors. For the unsafe behaviors of UAV operation, the degree centrality equals the number of unsafe behaviors of UAV supervision. Therefore, the larger the value of degree centrality, the more associated points and the more important the position in the affiliation network. According to the research of Malik et al., the degree centrality can be expressed by Equation 1 ( 49 ):

where
K = the key node,
j = other nodes,
N = the total number of nodes, and
2) Closeness centrality. The closeness centrality represents the proximity of a network node to other nodes. The greater the closeness centrality of a node, the smaller the average distance between the node and other nodes, and the more favorable it is in the process of information transmission. The closeness centrality of unsafe behavior of UAV supervision is a function of the shortest network distance between unsafe behavior of UAV operation affected by it and other unsafe UAV supervision and operation behaviors, as shown in Equation 2 ( 50 ):

where
g = the number of unsafe behaviors of UAV supervision,
h = the number of unsafe behaviors of UAV operation,
k = an unsafe operation behavior affected by the unsafe supervision behavior,
j = another unsafe supervision behavior or unsafe operation behavior, and
The closeness centrality of unsafe behaviors of UAV operation is a function of the shortest network distance from the unsafe behavior of UAV supervision concerned to other unsafe supervision behaviors and operation behaviors, as shown in Equation 3 ( 50 ):

where
g = the number of unsafe behaviors of UAV supervision,
h = the number of unsafe behaviors of UAV operation,
i = the unsafe behavior of UAV supervision involved in unsafe behavior of UAV operation,
j = another unsafe behavior of UAV supervision or unsafe operation behavior, and
3) Betweenness centrality. Betweenness centrality indicates the ability of participants to play an intermediary role in the network, as shown in Equation 4. It measures the extent to which a node is located between two nodes and pays attention to the control ability of a node over the nodes at both ends. Referring to the method of Wasserman and Faust, for unsafe behaviors of UAV supervision, only when each unsafe behavior of UAV operation affected by an unsafe behavior of UAV supervision meets such unsafe supervision behavior can such unsafe behavior of UAV supervision obtain the betweenness centrality, as shown in Equation 4 ( 51 ):

where
Similarly, if an unsafe behavior of UAV operation only involves one unsafe regulatory behavior, such unsafe behavior of UAV operation will reach the middle “points” of
2. Core-periphery analysis
In the unsafe UAV supervision and operation network, the “core” is composed of a series of divisions of unsafe behaviors of UAV supervision which are closely related to each unsafe behavior of UAV operation in the unsafe behavior of UAV operation partition. The unsafe behavior of UAV supervision in the core position can be regarded as the main unsafe supervision behavior in the network. On the one hand, the “periphery” contains a series of unsafe behaviors of UAV supervision which will not have a common effect on the same UAV operation unsafe behavior. On the other hand, the periphery contains a series of divisions of unsafe behaviors of UAV operation which have no contact with each other because they do not involve common unsafe supervision behavior. The core-periphery network structure can be expressed as follows ( 52 ):


where
One-Mode Social Network Analysis (SNA)
In the management of unsafe behaviors of UAV flight, the analysis of the two-mode social network is beneficial to identify the power of the unsafe UAV supervision behaviors over the unsafe behaviors of UAV operation. By analyzing the unsafe UAV supervision behaviors/unsafe UAV supervision behaviors network and unsafe behaviors of UAV operation/unsafe behaviors of UAV operation network, the main unsafe behaviors of UAV supervision and unsafe behaviors of UAV operation can be observed more clearly.
1. Network measures
1) Density analysis of the unsafe behavior of UAV supervision/unsafe behavior of UAV operation network. Density indicates how closely the network members are connected. The greater the density of the whole network, the greater the influence that the network may have on the attitudes and behaviors of the actors in it, and the more complex the network is ( 53 ). The density Equation is shown in Equation 7, with 0 ≤ density ≤ 1.

where
K = existing relational numbers, and
N = the total number of nodes in network G.
2) Cohesion analysis of the unsafe behavior of UAV supervision/unsafe behavior of UAV operation network. Cohesion refers to the relationship between two contacts of an actor in a network. If cohesion = 0, there is no relationship between nodes. If cohesion = 1, there is a strong relationship between nodes, and any one of them can obtain the same information and network benefits. The higher the cohesion, the closer the relationship and the more complex the network ( 53 ). The cohesion Equation is shown in Equation 8, with 0 ≤ cohesion ≤ 1.

where
N = the total number of network nodes.
2. In/out-degree analysis
In/out-degree analysis can reflect the strength of the influence of nodes ( 53 ). Calculation Equations are shown in 9 and 10:


where
If there is a connection relationship, the value will be 1, or it will be 0.
3. Structural hole analysis of the unsafe behaviors of UAV supervision/unsafe behaviors of UAV operation network
Structural holes can be used to express non-redundant connections among actors and can provide opportunities for occupiers to obtain “information benefits” and “control benefits,” thus having more competitive advantages than members in other positions in the network ( 53 ). The description, scope, and Equations of relevant parameters are as follows.
1) Effective size. The effective size of an actor is equal to the non-redundant factors of the network. The calculation of effective size is shown in Equation 11, with effective size > 0.

where
t = the number of connections in the network and
2) Efficiency. It can be used to describe the influence degree of nodes on other related nodes in the network. The efficiency of node i is calculated by Equation 12, with 0 ≤ efficiency ≤ 1.

where
n = the number of nodes, and
3) Aggregate constraint. It indicates the ability of a node to use structural holes. The more aggregate constraints of a node, the greater the constraints on the actions of the node, with 0 ≤ aggregation constraint ≤ 1. The Equation for calculating the aggregate constraint is as Equation 13:

where
q = a node with a common adjacency point of node i and node j,
Network Visualization
There are two social network methods: matrix method and network chart method. This paper used a matrix method to analyze the unsafe behavior set of UAV flights. According to the results of the questionnaire, NetDraw in Ucinet6.0 was used to generate a network visualization diagram of unsafe UAV supervision and operation behaviors, as shown in Figure 2. Unsafe UAV supervision and operation behaviors are represented by circular nodes and square nodes, respectively.
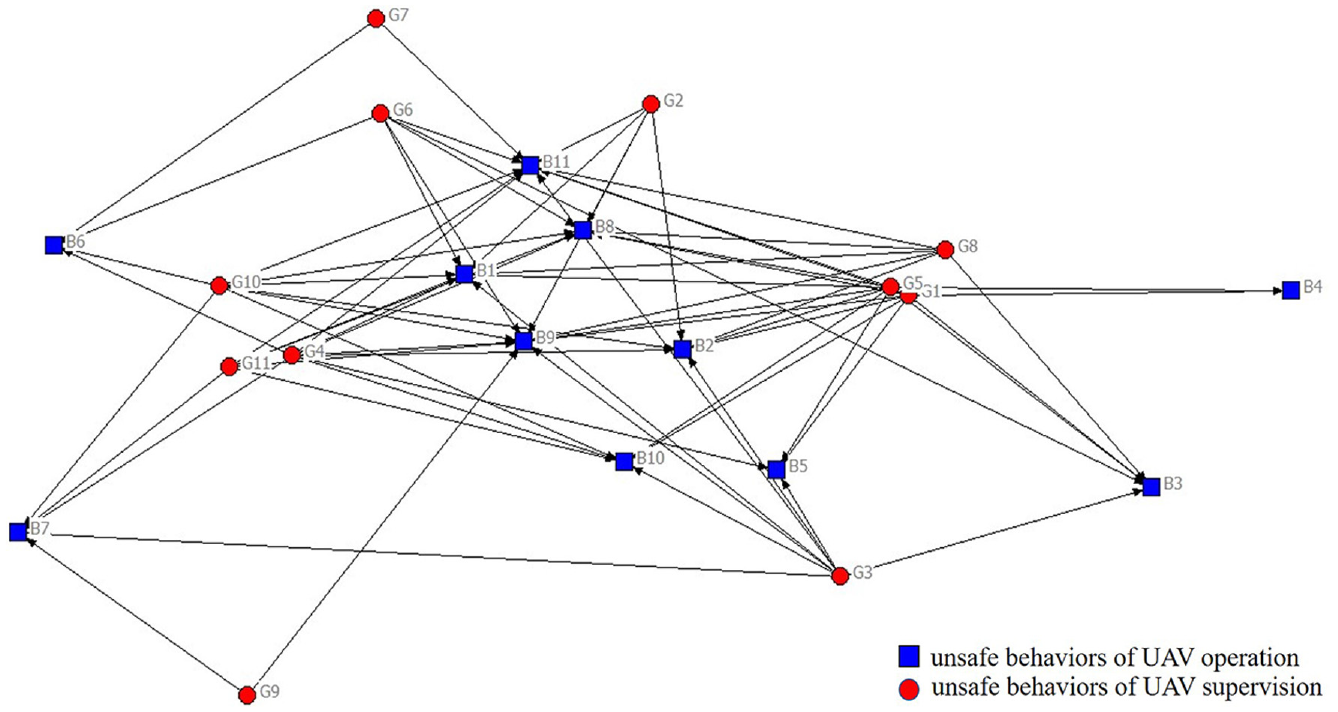
Visualization of the unsafe unmanned aerial vehicle (UAV) supervision behaviors/unsafe UAV operation behaviors network.
Analysis of Network Basic Characteristics
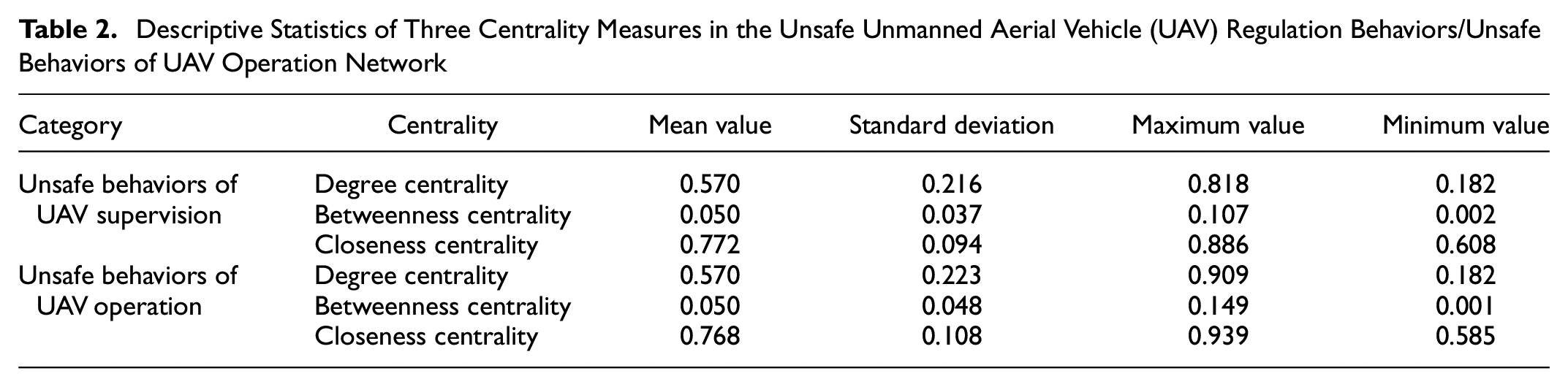
This paper made a preliminary descriptive analysis of the two-mode network of the unsafe UAV supervision and operation behaviors. In the two-mode network, “relationship” is defined as the influence of UAV supervision’s unsafe behavior on UAV operation. The more operation behaviors that can be affected, the stronger the relationship, which is a directed relationship. The network consists of 11 unsafe behaviors of UAV supervision and 11 unsafe behaviors of UAV operation. The network density is 0.5702, which indicates that it is a relatively tight network structure. It shows that, in this network model, the unsafe behaviors affecting UAV flight are closely related, and the influence transmission speed among various behaviors is relatively fast. Descriptive statistics of the three centralities of unsafe UAV supervision and operation behaviors in the two-mode network are shown in Table 2. The mean value of degree centrality and betweenness centrality of unsafe UAV supervision and operation behaviors are consistent, indicating that the two types of behaviors have roughly the same ability in resource control and information transmission. Obviously, the mean value of closeness centrality of the unsafe behavior of UAV supervision is slightly higher than that of unsafe behavior of UAV operation, which indicates that the unsafe behavior of UAV supervision can connect with other behavior nodes more quickly.
Descriptive Statistics of Three Centrality Measures in the Unsafe Unmanned Aerial Vehicle (UAV) Regulation Behaviors/Unsafe Behaviors of UAV Operation Network
Centrality Analysis
SNA usually uses degree centrality, betweenness centrality, and closeness centrality to measure the power of each node. Table 3 gives the corresponding centrality analysis results of 11 unsafe behaviors of UAV supervision and 11 unsafe behaviors of UAV operation. The two unsafe behaviors of UAV supervision with the highest degree centrality are G4 (weak supervision of UAV flight operation) and G5 (lack of training for operators to avoid accidents and respond to emergencies correctly), indicating that these two unsafe behaviors of UAV supervision are in the power centre of the network, and resolving these two behaviors can promote the use of more resources to control the unsafe behaviors of UAV operation. The two unsafe behaviors of UAV supervision with the highest betweenness centrality are G3 (unreasonable safety management structure of the organization) and G10 (lack of UAV flight rules and improvement), indicating that these two unsafe behaviors of UAV supervision play a significant role as a bridge in the network relationship, and can adjust the influence of unsafe supervision behaviors on unsafe operation behaviors, thus helping to resolve unsafe operation behaviors. The two unsafe behaviors of UAV supervision with the highest closeness centrality are G1 (the organization’s illegal deployment of unqualified personnel for tasks) and G7 (unreasonable arrangement of UAV flight plan), which indicates that these two unsafe behaviors of UAV supervision are easily controlled by other factors. Among these six factors, three (G1, G3, G4) come from organizational influence, and three (G5, G7, G10) come from unsafe supervision, which shows that it is necessary to reduce a variety of unsafe behaviors of UAV supervision in the process of resolving unsafe behaviors of UAV operation, and the two levels of unsafe behaviors of UAV supervision have the same importance. Therefore, to effectively control the unsafe behaviors of UAV operations, equal attention should be paid to organizational influence and unsafe supervision.
The Centrality of Nodes in the Unsafe Behaviors of Unmanned Aerial Vehicle (UAV) Supervision/Unsafe Behaviors of UAV Operation Network
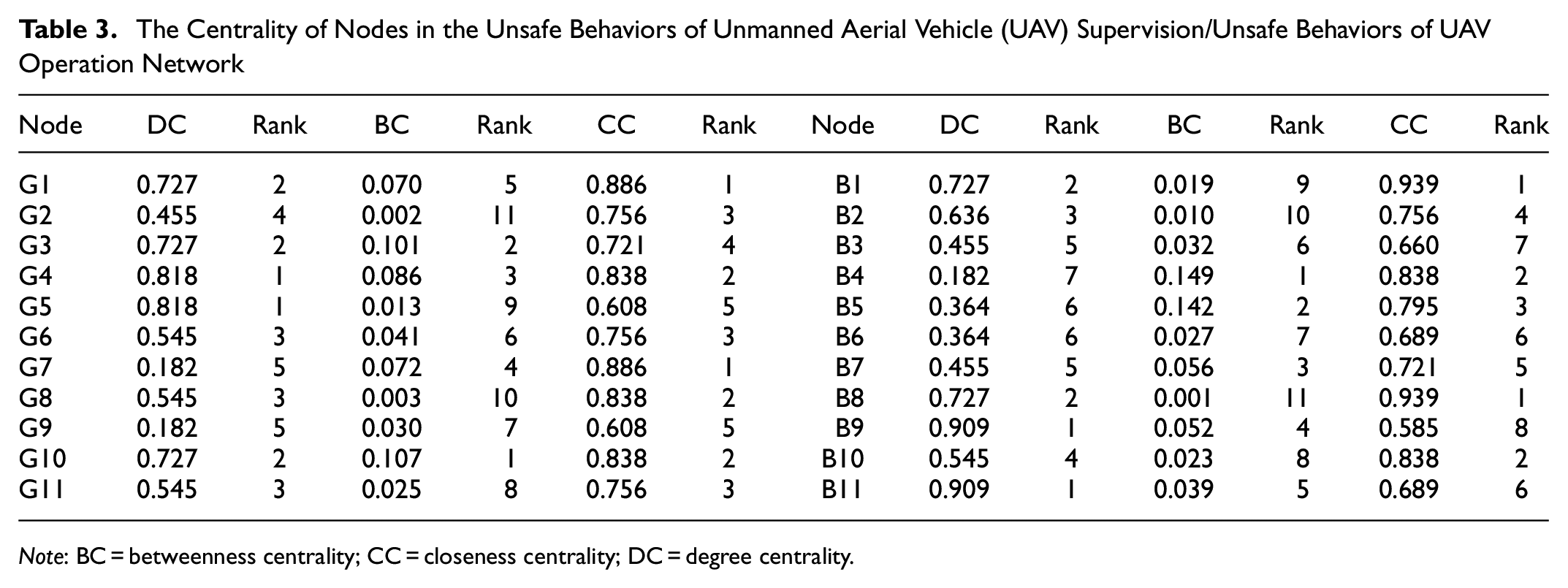
Note: BC = betweenness centrality; CC = closeness centrality; DC = degree centrality.
In the centrality analysis of unsafe behaviors of UAV operation, the two unsafe operation behaviors with the highest degree centrality are B9 (incorrect use of checklist for switching operation) and B11 (insufficient pre-flight inspection of UAVs); the two with the highest betweenness centrality are B4 (fatigue control of UAV by UAV operators) and B5 (UAV operators lack experience in dealing with emergencies); and the two with the highest closeness centrality are B1 (poor communication and coordination between UAV management department and relevant departments) and B8 (UAV operator’s operation decision does not meet the situational requirements). Among these six behaviors, three (B1, B4, B5) come from the preconditions for unsafe behaviors, and three (B8, B9, B11) come from unsafe behaviors, which are the difficulties in resolving unsafe behaviors of UAV operation, and should be paid close attention.
Core-Periphery Structure Analysis
The analysis of core-periphery structure can determine the unsafe behaviors at the core and those in the periphery of the social network. Compared with unsafe behaviors in the periphery, core unsafe behaviors are in a dominant position in an exchange relationship. Resolving core unsafe behaviors can effectively improve the safe flight level of UAVs.
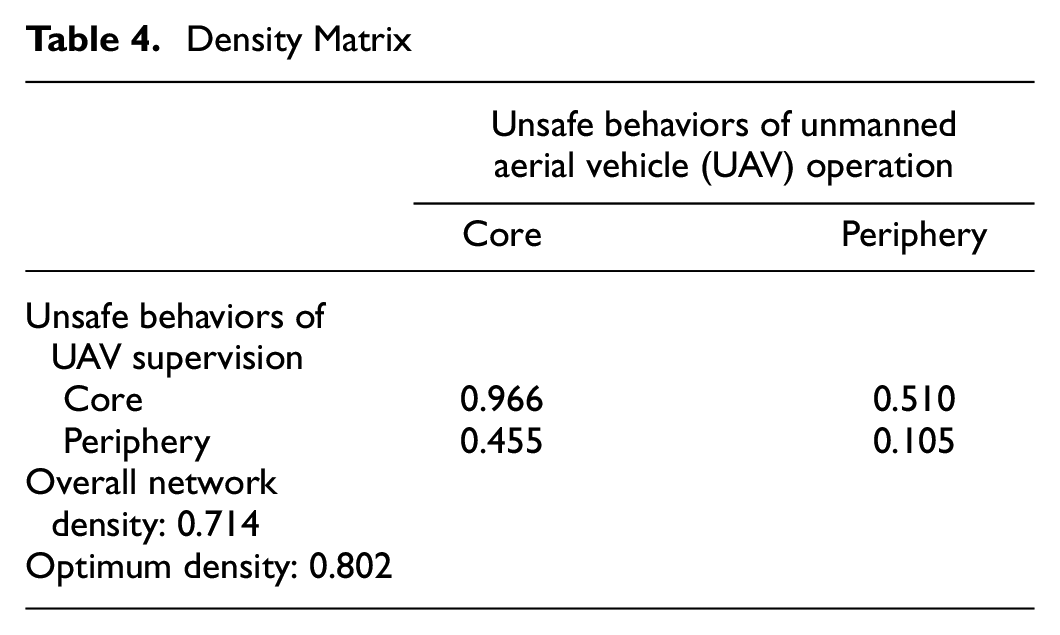
The results of the core-periphery analysis of the network are shown in Table 4. The interaction density between unsafe behaviors of UAV supervision and unsafe operation behaviors is 0.714, which indicates that there is a close relationship between unsafe behaviors of UAV supervision and unsafe operation behaviors at the core. The densities of the intersection between the unsafe supervision behaviors at the core and the unsafe operation behaviors in the periphery, and between the unsafe operation behaviors at the core and unsafe supervision behaviors in the periphery are 0.510 and 0.455, respectively, which are obviously lower than the density index of the core partition, indicating that other partitions between the unsafe supervision behaviors and unsafe operation behavior are loosely connected, and the network has a core-periphery structure.
Density Matrix
The core-periphery structure of the network was analyzed by Ucinet6.0, and the results are shown in Table 5. According to Table 5, unsafe behaviors of UAV supervision at the core include G1 (the organization’s illegal deployment of unqualified personnel for tasks), G3 (unreasonable safety management structure of the organization), G4 (weak supervision of UAV flight operation), G5 (lack of training for operators to avoid accidents and respond to emergencies correctly), G6 (lack of special supervisor to supervise the illegal UAV flight), G8 (lack of ground commander for the mission plan), G10 (lack of UAV flight rules and improvement), and G11 (incomplete setting of UAV fault protection function and no countermeasures). These unsafe behaviors of UAV supervision in the core position may interact intensively and influence each other, which is conducive to further resolving the unsafe behaviors of UAV operation. In addition, the unsafe behaviors of UAV supervision in the core position come not only from organizational influence but also from unsafe supervision, which confirms the conclusion that these two behaviors should be paid equal attention in centrality analysis.
Core-Periphery Structure Model of Unsafe Behaviors of Unmanned Aerial Vehicle (UAV) Supervision/Unsafe Behaviors of UAV Operation Network
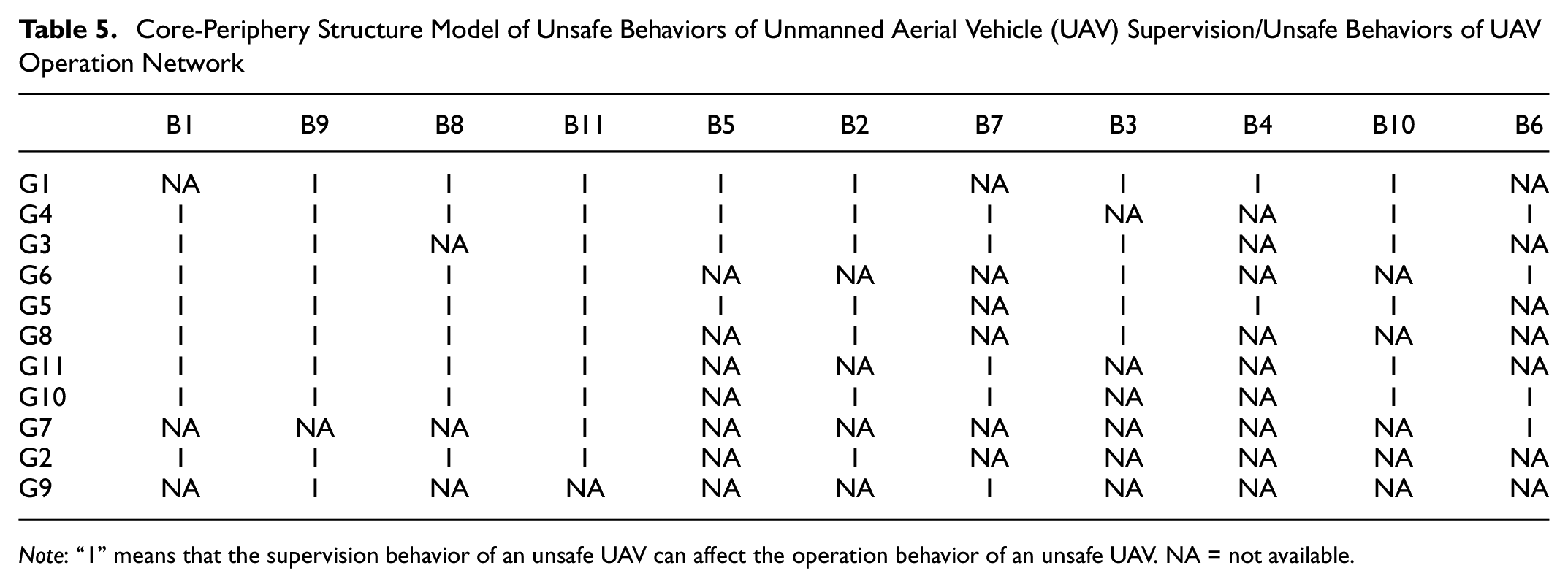
Note: “1” means that the supervision behavior of an unsafe UAV can affect the operation behavior of an unsafe UAV. NA = not available.
In addition, Table 5 not only lists the core and periphery areas of unsafe UAV supervision and operation behaviors but also intuitively conveys the information about controlling and reducing unsafe behaviors of UAV operation by resolving unsafe behaviors of UAV supervision. For example, G4 (weak supervision of UAV flight operation) can affect four unsafe behaviors of UAV operation in the core area and five in the periphery area. Similarly, unsafe supervision behaviors at the periphery can use the power of core unsafe supervision behaviors to affect unsafe operation behaviors. For example, G9 (known defects in UAV operating system but no countermeasures taken) has the power to affect B7 (UAV operating system defects), and it can resolve unsafe operation behaviors together with G3 (unreasonable safety management structure of the organization), G4 (weak supervision of UAV flight operation), G10 (lack of UAV flight rules and improvement), and G11 (incomplete setting of UAV fault protection function and no countermeasures). By analyzing the core-periphery structure of the network, we can obtain effective information to resolve the unsafe behaviors of UAV operation and intuitively provide a basis for resolving practical problems.
Network Analysis of Unsafe UAV Operation/Supervision Behaviors
Analysis of basic characteristics of the unsafe UAV operation/supervision behavior network
We transformed the two-mode network of unsafe behaviors of UAV supervision/unsafe behaviors of UAV operation into two one-mode networks of unsafe behavior of UAV operation/unsafe behavior of UAV operation, and unsafe behavior of UAV supervision/unsafe behavior of UAV supervision, and analyzed their densities and cohesion.
The densities of unsafe behavior of UAV operation network and unsafe behavior of UAV supervision network are 0.964 and 0.982, respectively, which shows that such two networks are highly dense, and the relationship between unsafe behaviors of UAV operation and unsafe behaviors of UAV supervision is complex.
2. In/out-degree of unsafe UAV operation/supervision behavior network
Because the unsafe behavior of UAV operation network is symmetrical, the in-degree and out-degree of each node are equal. Figure 3 shows the influence degree of each unsafe behavior of UAV operation. The degrees of B1, B2, B3, B5, B8, B9, B10, and B11 are 10, indicating that they are more likely to lead to unsafe operations. In contrast, the lowest degree of B4 (fatigue control of UAV by UAV operators) is 8, indicating that B4 has a little direct impact on other unsafe operation behaviors. In addition, B6 (bad operating environment for UAV operators) and B7 (UAV operating system defects) are more important than B4.
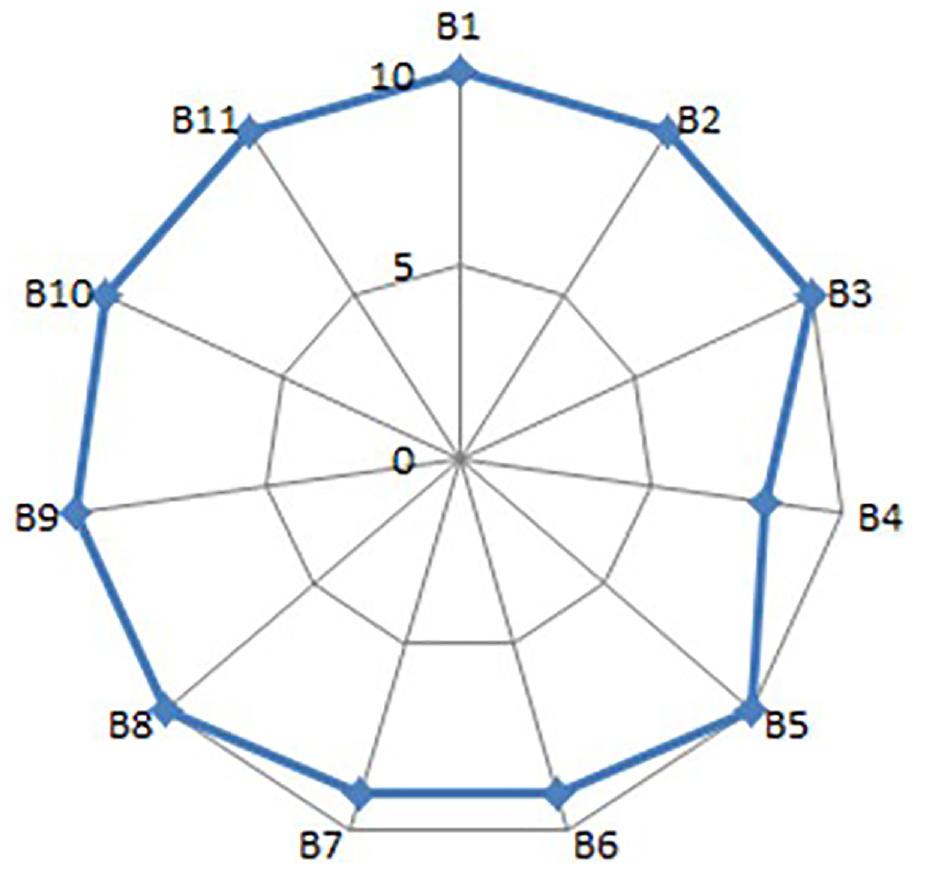
In/out-degree for one-mode unsafe behaviors of unmanned aerial vehicle (UAV) operation social network.
Similar to the unsafe behavior of UAV operation network, the in-degree and out-degree of each node of the unsafe behavior of UAV supervision network are equal. Figure 4 shows the in/out-degree of unsafe behaviors of UAV supervision. Except for G7 (unreasonable arrangement of UAV flight plan) and G9 (known defects in UAV operating system but no countermeasures taken), the degrees of the other nine unsafe supervision behaviors are 10. Therefore, these unsafe supervision behaviors have a greater impact than other unsafe supervision behaviors and play a crucial role in the network of unsafe behaviors of UAV supervision. In contrast, G7 and G9 have less impact on other unsafe supervision behaviors.
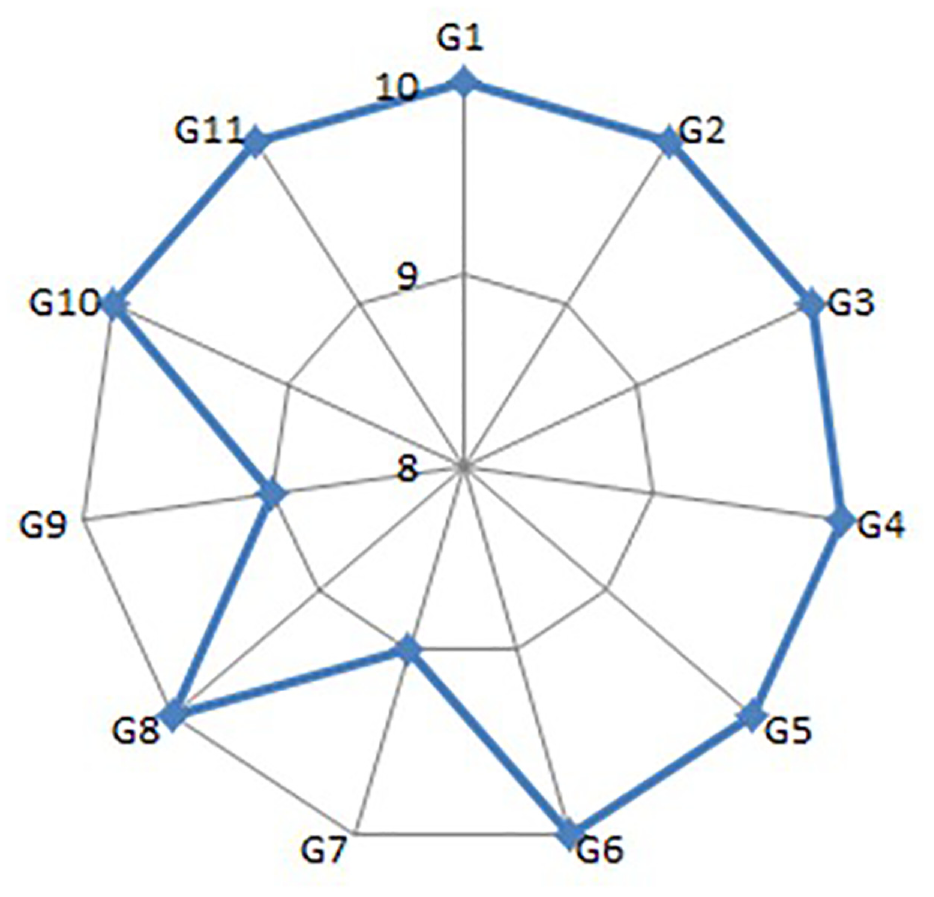
In/out-degree for one-mode unsafe behaviors of unmanned aerial vehicle (UAV) supervision social network.
3. Structural hole analysis of the unsafe UAV operation/supervision behavior network
By measuring the structural hole, unsafe behaviors of UAV operation can be seen to have a great influence on other unrelated unsafe behaviors of UAV operation in the unsafe behavior of UAV operation network, and unsafe behaviors of UAV supervision which have a strong influence on other unconnected unsafe behaviors of UAV supervision in the unsafe behavior of UAV supervision network can be identified.
The measurement results of structural holes in the unsafe behaviors of UAV operation/unsafe behaviors of UAV operation network are shown in Figure 5. The y-axis values are the results of measuring structural holes through effective size, efficiency, and aggregate constraints. Obviously, the efficiency of structural holes in the unsafe behavior network is in accordance with the distribution of effective size, and it is negatively correlated with aggregate constraints. In the unsafe behavior of UAV operation network, B4 (fatigue control of UAV by UAV operators), B6 (bad operating environment for UAV operators) and B7 (UAV operating system defects) are relatively weak, with small effective size and low efficiency, which indicates that their controllability is relatively low. At the same time, the overall constraints of these two unsafe behaviors are relatively high, which implies that they play a weak role in the unsafe behavior of UAV operation network because they are constrained by the other 10 unsafe operation behaviors.
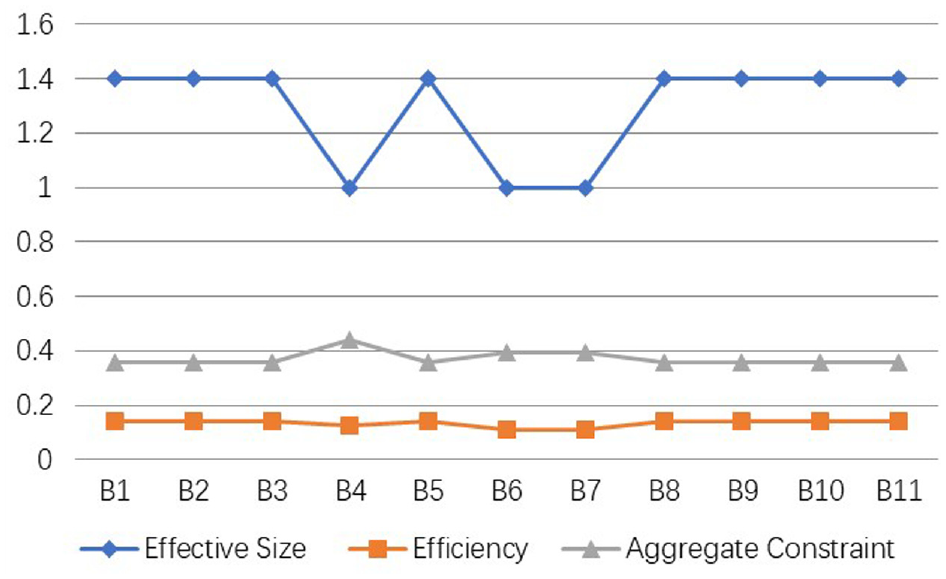
Structural holes for the unsafe behaviors of unmanned aerial vehicle (UAV) operation network.
The analysis of the unsafe behavior of UAV supervision network is shown in Figure 6. Specifically, G7 (unreasonable arrangement of UAV flight plan) and G9 (known defects in UAV operating system but no countermeasures taken) have a relatively small effective size and relatively low efficiency. This indicates that they are difficult to control. Furthermore, they have strong overall constraints, indicating that they play a weaker role in controlling unsafe behaviors of UAV supervision.
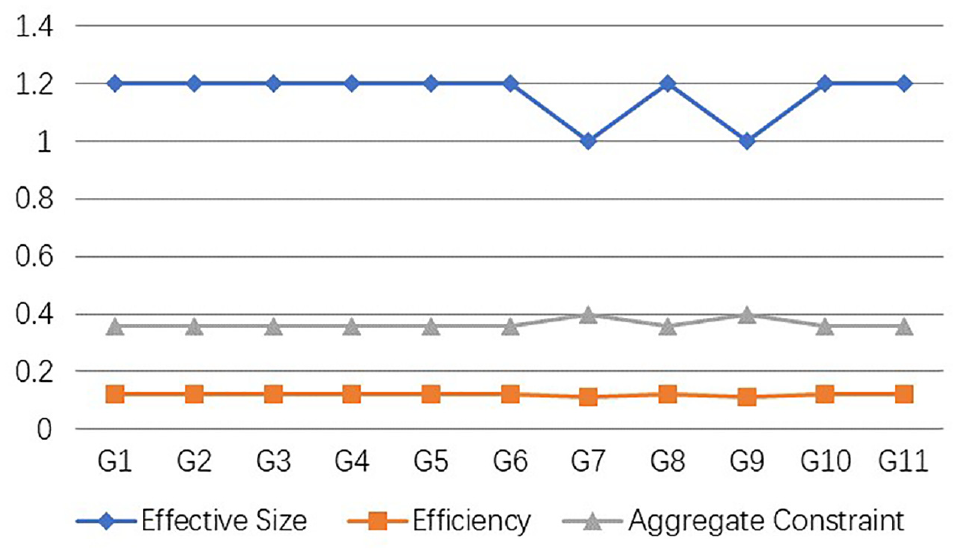
Structural holes for the unsafe behaviors of unmanned aerial vehicle (UAV) supervision network.
Discussion
The safety of UAVs has aroused widespread concern, and many scholars have studied safe UAV flights from different points of view. However, most of them focus on UAV flight risks or supervision issues and put forward corresponding suggestions. Few studies have discussed the relationship between unsafe behaviors of UAV flights and their solutions based on human factors.
According to the characteristics of UAVs, this paper proposed an analysis method to investigate the unsafe UAV behaviors and proved the effectiveness and feasibility of this method. Firstly, unsafe behaviors were classified based on the Swiss cheese model, and then the social network was used to analyze the relationship between influencing factors of unsafe UAV behaviors: it has become an effective tool to study unsafe UAV behaviors. According to the analysis, the core and most essential unsafe behaviors of UAV supervision are G4 (weak supervision of UAV flight operation) and G5 (lack of training for operators to avoid accidents and respond to emergencies correctly), which can promote the use of more resources to control unsafe behaviors of UAV operation. The key unsafe behaviors of UAV operation are B1 (poor communication and coordination between UAV management department and relevant departments) and B9 (incorrect use of checklist for switching operation), which have also been verified in one-mode network analysis. In addition, the results of the unsafe behavior of UAV operation network analysis also show that B6 (bad operating environment for UAV operators) and B7 (UAV operating system defects) are more important than B4 (fatigue control of UAV by UAV operators) in unsafe behavior of UAV operation control. In contrast, G7 (unreasonable arrangement of UAV flight plan) and G9 (known defects in UAV operating system but no countermeasures taken) have less impact on other unsafe behaviors of UAV supervision. Besides, G4 and G5 have the strongest power over unsafe behaviors of UAV operations and are likely to cause other unsafe supervision behaviors. Therefore, it is important for relevant departments to strengthen the supervision of UAV flight operations and train operators to prevent other unsafe behaviors, especially those that are at the core and can restrain unsafe operation behaviors.
The two-mode SNA based on the Swiss cheese model is intuitive and important for resolving unsafe behaviors of UAV flights and can identify the main unsafe human factors causing unsafe flights in different categories and levels. By exploring unsafe human factors, we can guide the flight safety management of UAVs.
The survey results show that there are important unsafe behaviors in UAV supervision and UAV operation. There are unsafe supervision factors with great influence on organizational influence and unsafe supervision behaviors, for example, G4 (weak supervision of UAV flight operation), G5 (lack of training for operators to avoid accidents and respond to emergencies correctly), and so forth, indicating that it is necessary to resolve unsafe behaviors of UAV supervision from various aspects to ensure safe UAV flights. There are unsafe operation behaviors that are difficult to resolve in the preconditions for unsafe behaviors and unsafe behaviors themselves, such as B1 (poor communication and coordination between UAV management department and relevant departments), B9 (incorrect use of checklist for switching operation), and so forth. Reducing these behaviors can directly improve the flight safety of UAVs.
There are core unsafe behaviors of UAV supervision and operation behaviors. Eight of the 11 unsafe behaviors of UAV supervision are at the core position, and four of the 11 unsafe behaviors of UAV operation are at the core of the network. Therefore, the unsafe supervision and operation behaviors which should be emphatically resolved in the process of resolving unsafe UAV flights are determined. Focusing on resolving the core unsafe flight behaviors can better cut off the reaction chain of accidents and promote safe flights.
In the unsafe behavior of UAV operation network, B4 (fatigue control of UAV by UAV operators) plays the weakest role in the network compared with other unsafe operating behaviors, while B6 (bad operating environment for UAV operators) and B7 (UAV operating system has defects) play an increasingly critical role in the network. In the unsafe behavior of UAV supervision network, except for G7 (the flight plan of UAV is not arranged reasonably) and G9 (the operating system of UAV has known defects but no countermeasures have been taken to improve it), the remaining unsafe supervision behaviors have a great impact on other unsafe supervision behaviors, which means that these unsafe supervision behaviors are likely to cause other unsafe supervision behaviors, so the supervision of unsafe UAV behaviors should be strengthened.
Conclusions
The applications of UAVs cover many fields, and their flight safety has aroused widespread concern in society. In the research on UAV flight safety, scholars often ignore the relationship between unsafe behaviors, and it is still unclear how the supervision of unsafe behaviors affects unsafe operation behaviors. In this paper, the unsafe UAV behaviors are classified based on the Swiss cheese model. The relationship between influencing factors of unsafe behaviors was analyzed using SNA. The core unsafe UAV supervision and operation behaviors were identified, which provides the basis for UAV safety management.
This paper discussed the interaction between UAV unsafe behaviors by analyzing the two-mode social network, the one-mode unsafe behavior of UAV supervision network, and the one-mode unsafe behavior of UAV operation network. This enriches the former research mode of UAV safety research and provides a theoretical and practical basis for promoting the safety management of UAVs. The analysis of unsafe UAV behaviors by social network shows that G4 (weak supervision of UAV flight operation) and G5 (lack of training for operators to avoid accidents and respond to emergencies correctly) have an important influence on unsafe behaviors of UAV operation; and B1 (poor communication and coordination between UAV management department and relevant departments) and B9 (incorrect use of checklist for switching operation) are key unsafe operation behaviors. In addition, B4 (fatigue control of UAV by UAV operators) plays the weakest role in the network compared with other unsafe operation behaviors, while B6 (bad operating environment for UAV operators) and B7 (UAV operating system has defects) play a more and more significant role in the unsafe operation network. Except for G7 (unreasonable arrangement of UAV flight plan) and G9 (known defects in UAV operating system but no countermeasures have been taken to improve), the remaining unsafe behaviors of UAV supervision have a great impact on other unsafe behaviors of UAV supervision. Although the above research results need to be tested by further exploration and practice, the results of this study can be used as a reference for UAV safety managers to make decisions on UAV flight safety management.
Moreover, we proposed the Swiss-cheese-model-based research method to classify unsafe behaviors and then analyze the relationship between the influencing factors of unsafe UAV behaviors by using social network, which is intuitive and important for studying unsafe UAV behaviors. Based on the network analysis results, we put forward some suggestions to promote UAV flight safety management. First of all, it is necessary to scientifically classify the unsafe UAV behaviors and clarify the main unsafe human factors that cause unsafe flights by category and level. By exploring the human factors, we can guide flight safety management efficiently and pertinently. Secondly, it is necessary to attach great importance to two important unsafe behavior factors of UAV supervision (G4, G5) and two key unsafe operation behaviors (B1, B9). UAV management departments should strengthen supervision and train UAV operators to avoid accidents and respond to emergencies correctly. In addition, it is necessary to strengthen communication and coordination with relevant departments, establish good cooperative relations, and jointly carry out UAV flight safety management, such as holding working meetings and formulating UAV operation specifications in combination with expert opinions. Finally, as the main supervisor of UAV flight safety, UAV safety managers should focus on eight unsafe behaviors of UAV supervision at the core. Starting from the source of the accident chain, that is, organizational influence and unsafe supervision to cut off the accident chain, we can create a safe flight atmosphere for UAVs by constructing a scientific and efficient supervision system, deploying specialized personnel to supervise UAV flights, and equipping professional ground commanders. We should pay close attention to these core unsafe behaviors of UAV supervision so as to prevent them from interacting intensively, which will further lead to unsafe behaviors of UAV operation.
Limitations and Future Recommendations
Despite its strengths, this study also has some limitations. First of all, the factors of unsafe behaviors of UAV flights collected in this study originated from relevant laws, regulations, and literature at home and abroad and could not include all potential influencing factors. In addition, although this paper applies the nomination method and the snowball method to conduct research, it is still hard to attract the participation of all experts. For future research, a detailed database of unsafe behaviors is needed, and multiply cases can be used to predict and analyze safety risks. At the same time, a real-time warning system can be developed to enhance the flight safety level of UAVs.
Footnotes
Acknowledgements
The acquisition of data was a complex process in this study. The authors are grateful to all the respondents in the questionnaire and the participation of different industry experts. In addition, we appreciate the editors and anonymous reviewers for the invaluable comments and suggestions that helped in improving this paper.
Author Contributions
The authors confirm their contribution to the paper as follows: study conception and design: W. Wang, Y. Liu; data collection: X. Guo, A. Tang, Q. Yang; analysis and interpretation of results: W. Wang, X. Guo, A. Tang; draft manuscript preparation: W. Wang, X. Guo, Y. Liu, A. Tang. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in this manuscript was supported by the 2020 Sichuan International Science and Technology Innovation Cooperation Project (2020YFH0160) and the Social Science Planning Project of Sichuan Province (SC21B097).
Data Accessibility Statement
The generated data for this study will be available on reasonable request to the corresponding author.