
Abstract
The competition for urban space and the debate about where people can and should ride their bicycles began not long after this new form of mobility was introduced to the public. For two centuries, we have debated and eventually investigated whether bike lanes belong on the sidewalk or if they should be on the street alongside the vehicular roadway. Existing research has provided evidence of preferences for bike lane alignment based on perceived safety or comfort as well as objective measures of comparative safety based on available crash and hospital data. Much of the existing research has been driven by deductive assumptions or is limited by the lack of data describing near-miss events and the subtle everyday interactions cyclists experience when using different types of cycle facilities. To help us understand better what role everyday interactions play in the relative functionality of sidewalk and on-street bike lanes, an observational study was conducted using a new qualitative–quantitative grounded theory-driven method for identifying and interpreting the outcome of cyclists’ interactions. Using data gathered from 2,583 interactions observed at four case study street segments in Munich, Germany, four outcomes were identified: no reaction; adjusting or yielding; lane exiting; or multiple reactions. Based on inferential analyses of these outcomes, this paper presents an assessment of the safety, directness, and access afforded or hindered by the spatial conditions of observed interactions. The results of this assessment revealed a trade-off between frequent, but minor interactions in sidewalk bike lanes and infrequent, but less safe interactions in on-street bike lanes.
The competition for urban space and the debate about where people can and should ride their bicycles has been ongoing for over two centuries. From the beginning, cyclists were perceived as dangerous nuisances who disrupted leisurely pedestrian spaces and interrupted vehicular traffic flows ( 1 , 2 ). Early policies addressing bicycle traffic restricted when and where bicycles could be used ( 2 ). The main goals of the first urban bike lanes built in the early 1900s were to protect vehicular flows and driver safety, and a secondary goal was to safeguard pedestrian safety and comfort ( 3 , 4 ). Over time, following social movements, the goals of bike lanes have been updated to consider the needs of cyclists using these facilities. Today, the internationally recognized Design Manual for Bicycle Traffic published by CROW ( 5 ) recommends that bicycle infrastructure provided on urban streets should meet the following goals: safety; directness; comfort; and attractiveness. Despite updated goals and design innovations seeking to meet these aims better, we still find ourselves asking the same questions about bicycle infrastructure today that were asked a century ago: do urban bike lanes belong away from vehicular traffic on the sidewalk or away from pedestrian traffic on the vehicular roadway? Which bike lane alignment better meets today’s goals for the infrastructure?
Existing qualitative research has helped answer such questions using surveys or travel diaries to explore comfort, attractiveness, and perceived safety ( 6 – 8 ). Quantitative research using count-based observation or bicycles fitted with instrumentation has addressed questions of objective safety and directness ( 9 – 12 ). We argue that assessing if and how different bike lane alignments meet conceptual goals requires paying more attention to the nuanced details of people’s use of space and interactions in the real world. To build knowledge and inform future street (re)design, we present here the results of a study using a new innovative inductive–deductive observational method for identifying interactions, interpreting threats to achieving bicycle policy goals, and measuring the success achieved. In addition to assessing the safety and directness of different bike lane alignments, this research also considers access and the role accessing behaviors play in the normal functions of urban bike lanes. However, using unobtrusive direct observation means goals in relation to comfort and attractiveness cannot be addressed.
The following two sections present an overview of the new method and case study. Next, the results of a qualitative–quantitative analysis of the outcome of cyclists’ interactions observed on streets with sidewalk and on-street bike lanes are advanced, followed by a comparative assessment of the implications of spatial variables that are significantly associated with interaction outcomes for safety, directness, and access. We conclude by discussing the persistent problems hindering both types of alignment and offer guidance for future decision-making with regard to how and where to build urban bike lanes to achieve their goals better.
Method
To investigate the real-world comparative functionality of different types of bicycle infrastructure, an innovative mixed methods, grounded theory-driven observational approach was developed for identifying the intricacies of cyclists’ interactions and interpreting the outcomes. Distinct from existing research (see Aldred [ 6 ], Kircher et al. [ 13 ], Bernardi and Rupi [ 14 ]), this method does not predefine expected types, circumstances, or outcomes of interactions and does not assume that all interactions have negative consequences. Interactions are a natural consequence of urban streets simultaneously serving as transportation facilities and public spaces. However, depending on their outcomes, interactions may signal potential threats to the goals in view or provide evidence of success in creating conditions for safe negotiations of movement between the different people using the street. The new method introduced in Silva et al. ( 15 ) applies an iterative four-step coding procedure designed to expand knowledge of the known and unknown interactions cyclists’ experience. Data collection begins with qualitative induction to identify interactions and their circumstances, then adds quantitative deduction to uncover the key circumstances contributing to revealed outcomes of interactions, this last being recorded on video. Results from a final quantitative analysis are used to inform a qualitative assessment of significant potential threats to safety, directness, and access.
Data Coding and Analysis
The research begins with a general definition of an “interaction” as involving both stimulus and reactor participants and at least one cyclist as either type of participant ( 15 ). The stimulus participant may be a person using any mode of transportation or a stationary object whose (in)actions have the potential to instigate behavioral reaction by a reactor participant. The reactor can be a person using any mode of transportation who may alter their (in)action to coordinate their interaction with the stimulus, but who may also have no reaction. An interaction’s outcome is defined as the reactor’s (non)reaction to the stimulus, and the circumstances of an interaction are defined as the physical context in which the interaction is observed and the descriptions of the participants and various (in)actions involved.
Starting with these open definitions, the following coding procedure is used iteratively to guide video-based data discovery and analysis:
Coding is done manually, with variables recorded in qualitative terms and confirmed through multiple reviews of the film by the researcher. If a cyclist begins coasting or visibly reduces their pedaling or speed when approaching a stimulus, this is initially coded as a yielding or slowing reaction. Full stops were infrequently observed, and few interactions resulted exclusively in slowing or yielding reactions, with both often observed together with lateral reactions. To create a dependent outcome variable suitable for the regression analysis carried out in step four, reaction categories were refined in the third step and the four following generalized types of outcomes were revealed: no reaction; adjusts lateral position or yields; exits lane; and multiple reactions.
Assessment
To determine which outcomes are negative, positive, or neutral, the significant variables contributing to each outcome are assessed against the three criteria for good bicycle infrastructure discussed below.
Safety
The Design Manual for Bicycle Traffic ( 5 ) instructs that safety is achieved by designing streets that allow cyclists to move at their optimum speed, thus preventing collisions. Interventions to meet these safety aims include providing sufficiently wide bike lanes that are clear, devoid of obstacles, and avoid interactions with other road users. Parkin ( 16 ) adds that minimizing vehicular travel speeds and volumes can also enhance bicycle safety. Here, safety is assessed by considering the risk each outcome presents for all interaction participants based on the significant variables describing where it occurred and the (in)actions involved.
Directness
The main way in which the goal of directness can be achieved is to minimize the time and distance a cyclist must travel to reach his/her destination ( 5 ), with Parkin ( 16 ) emphasizing the requirement to allow cyclists to travel at speed without needing to divert their path to navigate the road or negotiate interactions. These sources recommend bicycle infrastructure should be free of obstacles, sufficiently wide for cyclists to pass one another, and provide mid-block crossing opportunities. Staying with Parkin’s ( 16 ) definition of directness as the inverse of circuity, instances of cyclists traveling the wrong way or in the wrong lane signal network-level issues with directness. Segment-level threats to directness include outcomes involving lateral adjustments or lane-exiting behavior, along with interactions stimulated by passing maneuvers or incorrect use of the lane.
Access
Achieving the goal of access can be done by providing adequate space and opportunities for accessing and egressing actions without stimulating interactions that interrupt the achievement of the safety and directness goals. The possibility of achieving the access goal is assessed by considering the access provided, or not, by the geometric design at the locations where interactions occur, and the role played by accessing and egressing actions in observed interactions.
Case Study
The grounded theory-driven observational method and assessment was applied to a comparative case study exploring the instances and outcome of interactions occurring in street segments in Munich, Germany featuring two different bike lane alignments (Figure 1): on-street bike lanes delineated with a painted line on the vehicular roadway and sidewalk bike lanes on the pedestrian sidewalk. Although providing designated space for cycling, both lane alignments have no fixed barrier and, therefore, inherently expose bicycle traffic to adjacent flows of vehicular and pedestrian traffic.
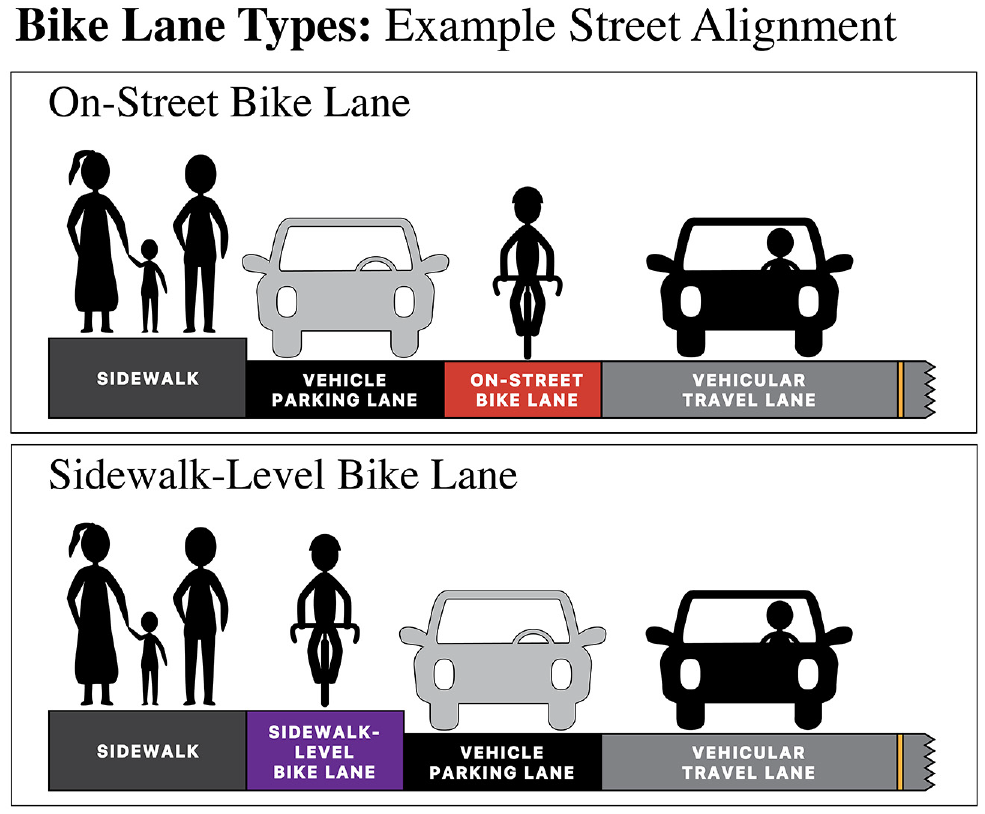
Bike lane alignments under investigation.
Four sites were selected for this analysis, two with on-street bike lanes and two with sidewalk bike lanes. In selecting sites for this study, the objective was to include locations similar enough for comparison but unique enough to provide insights into the impact of specific design features. The study aimed to include street segments with comparable volumes of bicycle, pedestrian, and vehicular traffic as well as related land use. The land use at Site 1 is unique; however it is located only two blocks from Site 3 and, therefore, was considered relevant for comparison. To control for as many extraneous variables as possible, selected sites also include unique features, such as designated a bicycle parking lane, a bus stop lane, obstructed or clear sidewalks, and different treatments separating the bike lane and the parking lane. Finally, an important selection criterion was access to film the street segment from an inconspicuous location with a mostly unobstructed view of the bike lanes ( 17 ).
Observations of cyclists’ interactions on streets with on-street bike lanes were collected from Sites 1 and 2. At Site 1 (Figure 2), whereas the east side of the street includes a traditional parking lane, on the other side of the street this space is used for bicycle parking. A buffer of space is provided between the bike lane and the parking lanes, with the outside of the bike lane adjacent to the vehicular travel lane. One driveway is built on each side of the visible street, with the east driveway serving as a shared-use access point to a museum, and the west driveway giving access to a small parking lot.
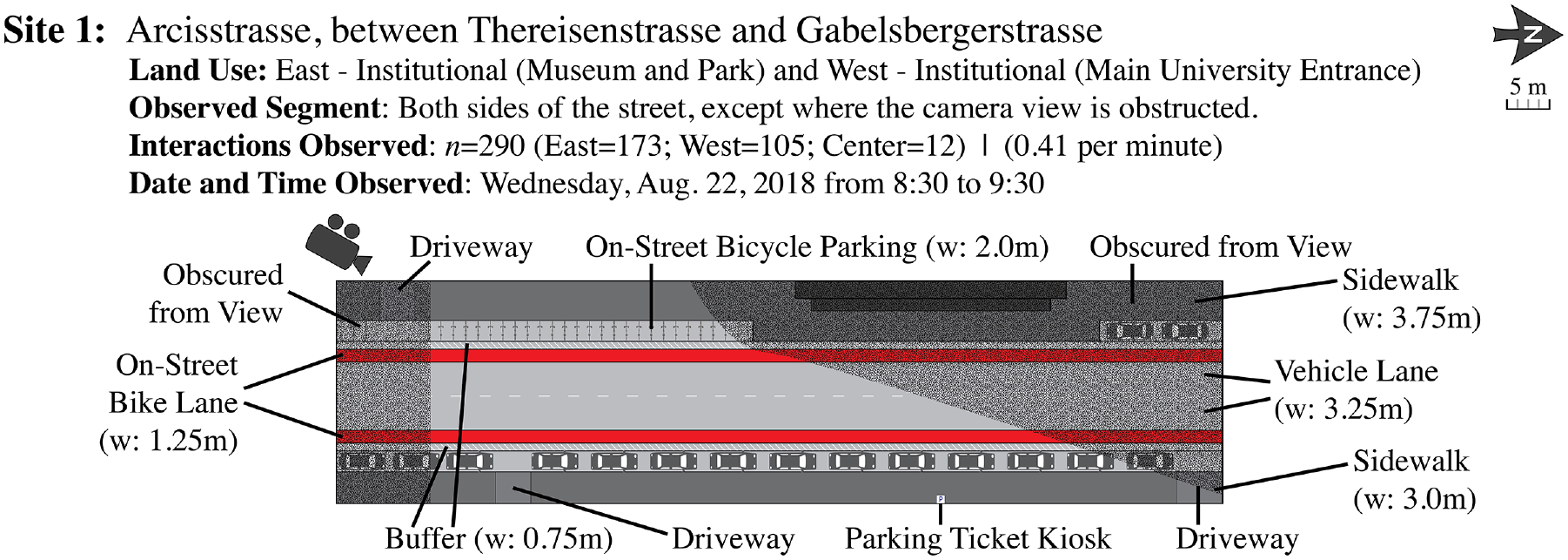
Diagram and overview of Site 1.
For Site 2 (Figure 3), only the south side of the street was included in the study, because trees obstructed the camera’s clear view of the north side. Most of the length of the bike lane on the south side is on the street; however a portion of it is on the sidewalk. The on-street lane is wider than the sidewalk lane. Both portions of the lane are buffered when adjacent to the vehicle parking lane. At the point at which the on-street lane passes by the bus stop lane, no buffer is provided. Three driveways are located on this side of the street, all of which give access to underground garages. One of the driveways crosses the sidewalk portion of the bike lane and the others cross the on-street bike lane.
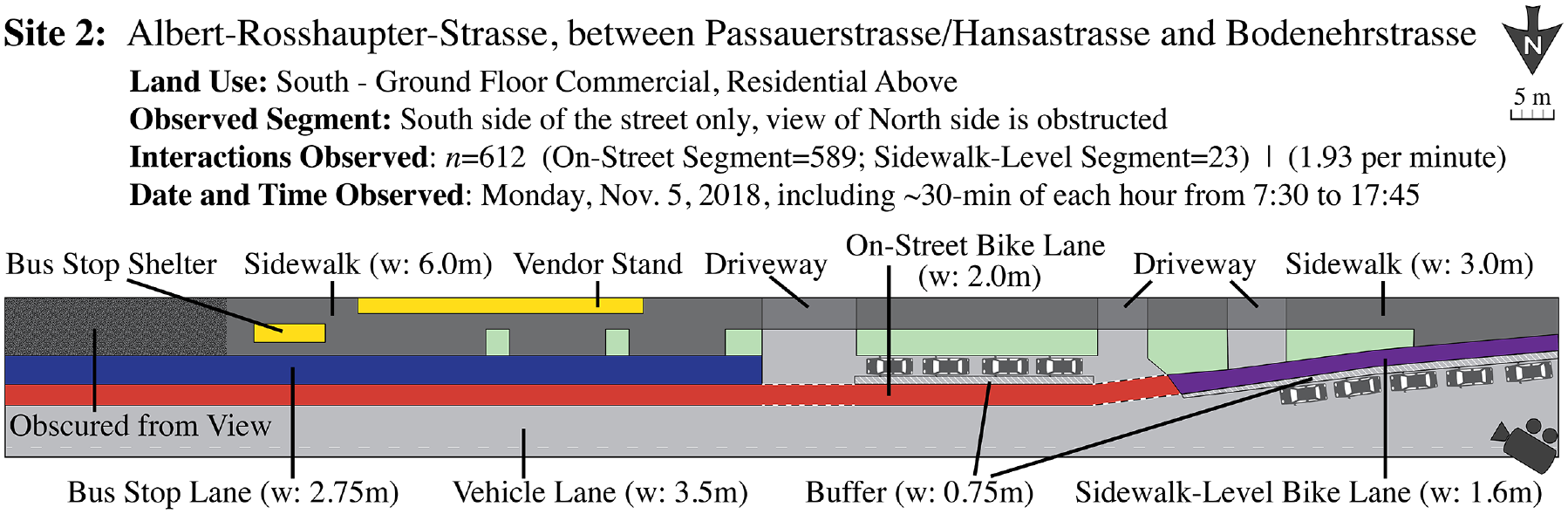
Diagram and overview of Site 2.
In addition to those interactions observed on the small sidewalk bike lane portion of Site 2, observations of interactions on streets with sidewalk bike lanes were also collected from Sites 3 and 4. On the east side of the street at Site 3 (Figure 4), no buffer is provided between the bike lane and the parking lane or the sidewalk. However, the bike lane on the west side is buffered from the adjacent parking lane. Three driveways are provided on both sides of the street, with two providing access to vehicle parking and the other providing cyclists with an opportunity to access or egress the bike lane.
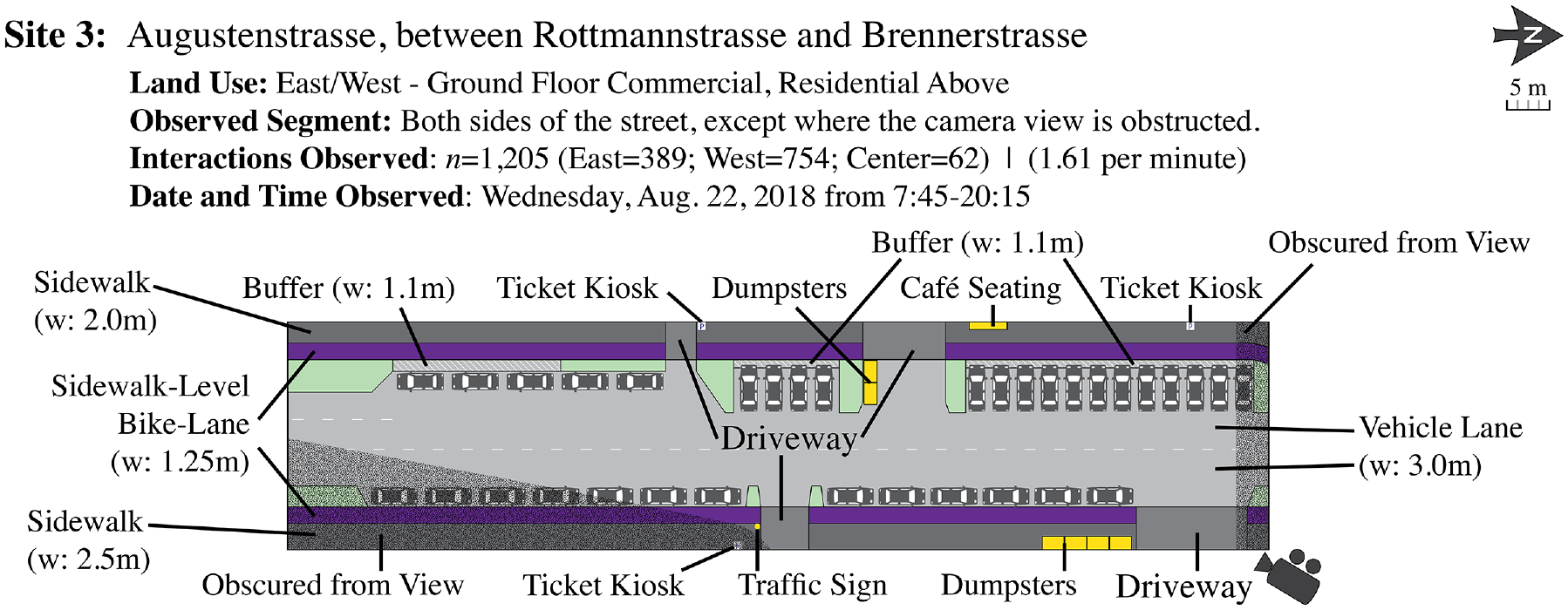
Diagram and overview of Site 3.
At Site 4 (Figure 5), a traditional buffer is not provided between the sidewalk bike lane and vehicle parking lane. Instead, the bike lane is set back from the curb and a row of hedging acts as a physical and visual vertical barrier between the non-motorized area and the vehicular roadway. During the observational period, a portion of the sidewalk at Site 3 was obstructed by construction activity. Two driveways cross this street segment, both of which give access to surface or underground parking. Similar to Site 2, only one side of the street is included in the study because of trees obscuring the camera’s view of the south side.
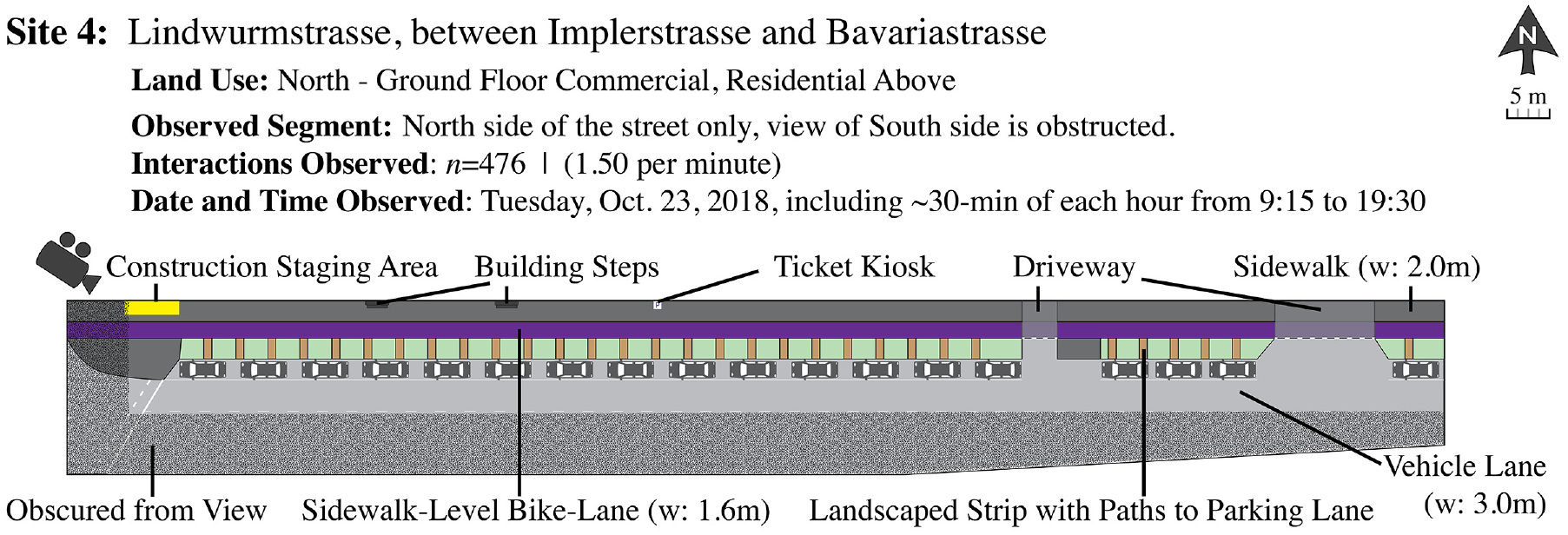
Diagram and overview of Site 4.
Video recordings of observations from Sites 1 and 3 were made on the same date over the same approximately 12-h period. Recordings from Sites 2 and 4 were taken in the months following the original filming date. It was planned that all observations would be made mid-week; however, because of weather conditions, recordings from a Monday were used the week Site 3 was accessible for filming.
The recordings from Sites 1 and 3 were used to develop the coding scheme for observed interactions using the inductive grounded theory-driven coding process. To confirm, refine, and expand this coding scheme and the categories of outcomes revealed, half of the film collected from Sites 2 and 4 was included in the observational study. The final analysis of interaction outcomes was a total of 2,583 interactions identified on approximately 35 h of film recorded at the four case study sites.
Results
Based on the analysis of the 2,583 interactions identified in the case study street segments using the new method, four discrete interaction outcomes were identified. Each outcome is described below, with their frequencies presented in Figure 6.
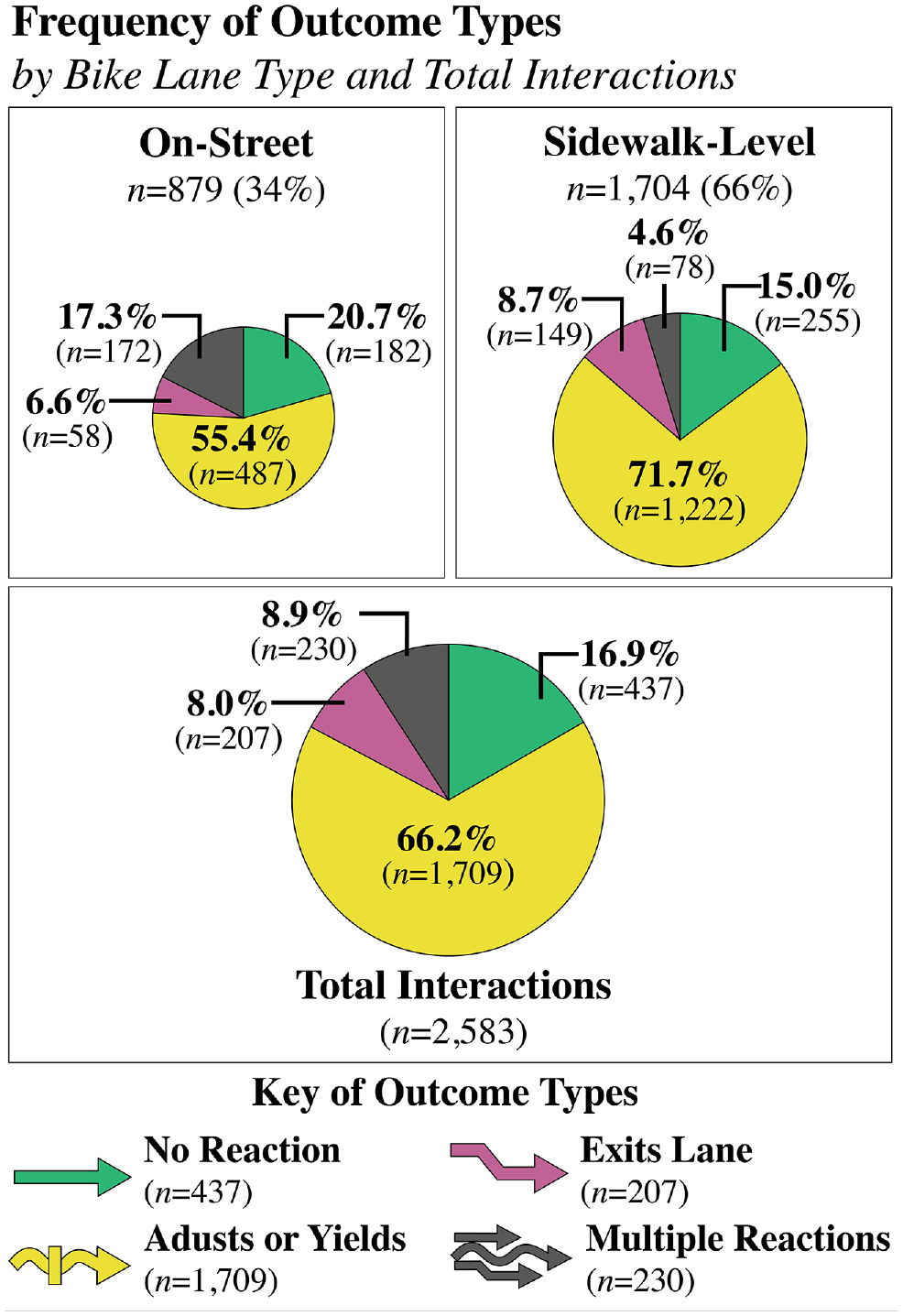
Frequency of the outcome of observed interactions, by bike lane alignment.
No Reaction
No reactor participants engage in any lateral, speed, or gestural reactions with the person or object stimulating the interaction. This is considered to be the ideal outcome because reactors appear unaffected by their exposure to the stimulus (in)action.
As Figure 6 shows, 16.9% (n = 437) of all observed interactions resulted in this non-outcome. In sidewalk bike lanes, the most common type of interaction with this outcome involves a cyclist stimulus traveling the wrong way in the bike lane (n = 53) or sidewalk (n = 54) who interacts with a cyclist or pedestrian reactor who is traveling in the correct direction in the lane designated for their mode of travel. As far as on-street bike lanes are concerned, interactions resulting in no reaction also involve reactors legally using their designated lane, but are most often stimulated by a cyclist passing another cyclist (n = 43) or a pedestrian crossing the street (n = 30).
Adjusts Lateral Position or Yields
All reactor participants laterally adjust their position or speed of travel, or otherwise yield in reaction to the person or object stimulating the interaction. The reactor clearly responds to the stimulus (in)action, but remains in the same travel lane or portion of the roadway he/she was using before the interaction. This outcome indicates a minor concern for directness and potential concerns for safety. It may also suggest issues related to the design of the bike lane (having no fixed barrier) and, consequently, being exposed to adjacent travel lanes.
The majority of interactions observed in this study resulted in this outcome, accounting for 66.2% (n = 1,709) of the total. In sidewalk bike lanes, this outcome most frequently (n = 366) involves cyclist reactors who adjust their position or speed in the bike lane as they pass by pedestrians on the sidewalk, with the pedestrians stimulating the interaction simply by their presence. The most common type of interaction resulting in this outcome in on-street bike lanes (n = 113) involves a cyclist reactor who adjusts his/her position in the bike lane when passing a vehicle parked on or near to the lane.
Exits Travel Lane
All reactor participants move to a different travel lane or other portion of the roadway in response to the stimulus (in)action. This outcome indicates a major concern for directness, as the reactor’s path of travel is clearly disrupted. Lane exiting is a minor or major concern for safety, depending on the full circumstances of the interaction.
This is the most infrequent outcome observed, accounting for only 8.0% (n = 207) of interactions. On streets with sidewalk bike lanes, this outcome is equally likely (n = ∼20) to be stimulated by a stationary vehicle, stationary object, or person using the wrong travel lane. The reactor’s lane-exiting behavior is always temporary, and he/she always returns to his/her original travel lane after the interaction. In the case of on-street bike lanes, this outcome was most frequently (n = 22) instigated by stationary vehicles, and the reacting cyclists returned to their lane after passing the vehicle.
Multiple Reactions
All reactor participants have a different reaction to the person or object stimulating the interaction, including any combination of any of the three discrete reaction types described above. Unlike other outcomes describing uniform reactions to the stimulus, this outcome describes more complex interactions and may indicate minor to major issues with regard to the probability of meeting the goals of the infrastructure.
In total, only 8.9% (n = 230) of interactions resulted in these complex outcomes and only 26.5% (n = 61) of these interactions involved the most severe outcome of lane exiting. Most interactions resulting in multiple reactions (n = 152) occurred on streets with on-street bike lanes. Here, they most often (n = 31) involve a stationary vehicle and another road user engaged in an accessing or egressing action that stimulates an interaction with one or more reactor legally traveling in his/her lane. When this outcome is observed in sidewalk bike lanes, it most frequently involves cyclist or pedestrian reactors legally traveling in their lane who interact with a cyclist who stimulates the interaction by passing another cyclist (n = 7) or who is traveling the wrong way in the bike lane (n = 8).
Analysis
Using each outcome as binary dependent variables, binary logistic regression (BLR) was used to identify independent variables significantly associated with each type of outcome. Rather than ordinal logistic regression, which would provide insights into the factors leading to one outcome as opposed to another, BLR was selected with the purpose of exploring the unique circumstances of each outcome observed.
To identify the variables in the four models, the analysis was done in several steps. First, tests of independence were carried out to detect which of the observed independent variables had a statistically significant relationship with each outcome. Second, all variables found to have a significant relationship with a given outcome were tested individually using BLR. Those variables not statistically significant at or below the .10 level were removed from consideration for the model. Finally, BLR was carried out using different selection methods, so that the inclusion of different combinations of all those independent variables found to be statistically significant in previous steps could be explored.
To identify the final models, a randomly selected subset of the data representing 90% (n = 2,325) of all interactions was used for BLR. Candidate models with significant results and model parameters showing improved prediction were then validated across an additional 10 90% subsets and the total set of 2,583 cases. The final model selected for each outcome had to meet the following requirements:
All independent variables are statistically significant at or below the 0.10 level.
Pearson’s correlation coefficient between variables may not exceed +/− 0.4.
Predicted percent of the model must exceed that of the base case.
Results are consistent for all validation subsets and the full dataset.
Significant Variables for the Outcomes
Results from this iterative inferential analysis of the four interaction outcomes are presented in Table 1, showing the coefficients for each independent variable included in the final models. The three groups of independent variables in these models include the following: (a) location and time of the interaction; (b) actions and characteristics of the stimulus participant(s); and (c) actions and characteristics of the reactor participant(s).
Significant Variables Included in Regression Model for Each Outcome
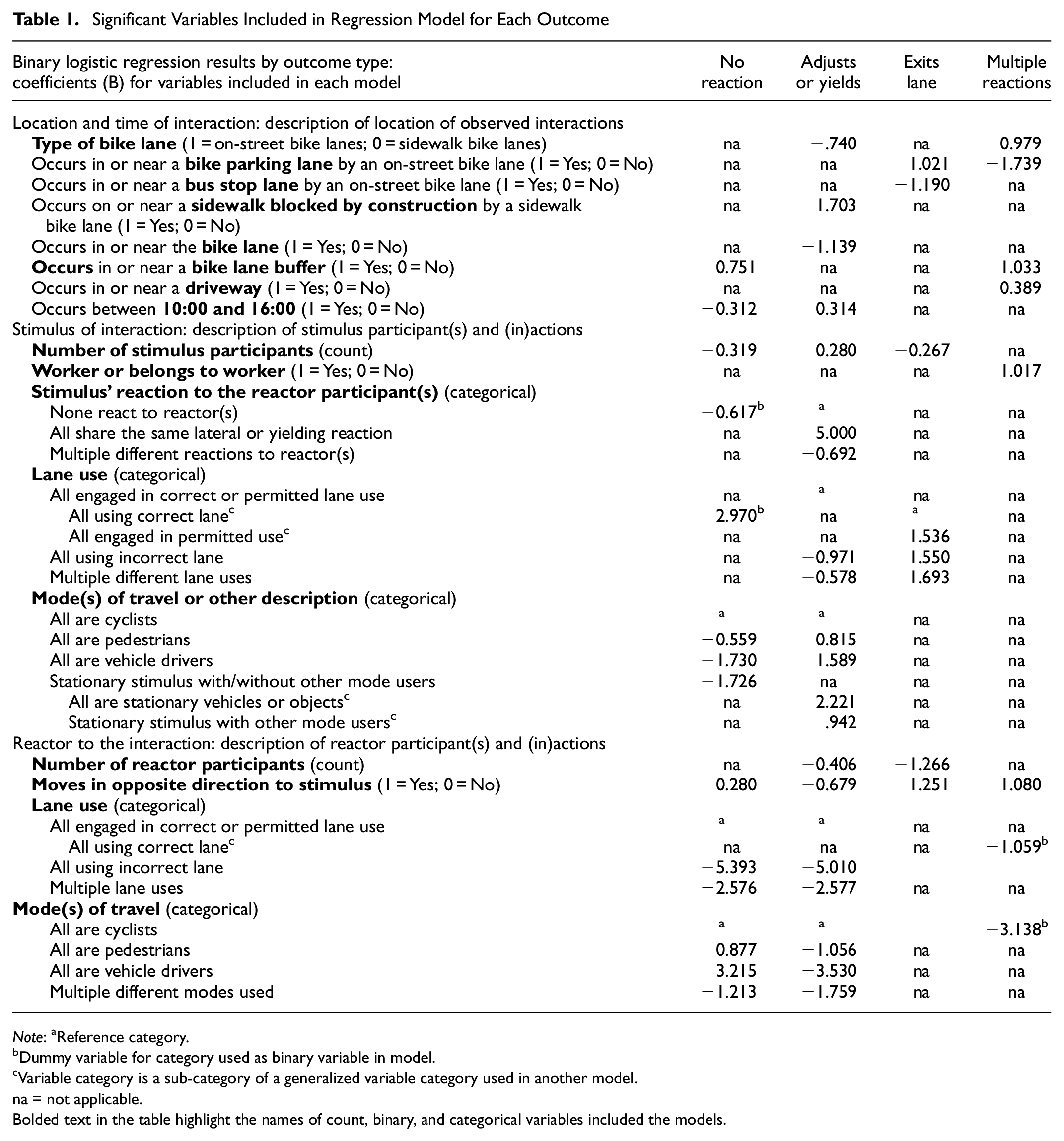
Note: aReference category.
Dummy variable for category used as binary variable in model.
Variable category is a sub-category of a generalized variable category used in another model.
na = not applicable.
Bolded text in the table highlight the names of count, binary, and categorical variables included the models.
The first group includes seven binary variables describing the spatial conditions of interactions, plus one explaining what time of day the interaction occurred. After testing many variables describing time of day, the version of this variable included in the models distinguishes between interactions taking place between 10:00 and 16:00 and those occurring during the morning or evening commute hours. The other variables in this group identify the presence of specific spatial features on the portion of the roadway where interactions occurred, and these are discussed in more detail in the following section.
Independent variables describing the stimulus and reactor include count variables of the number of participants involved in the interaction and categorical variables describing their modes of travel. Lane use is described through a simple categorical variable. Correct lane use includes people traveling or standing where they are legally allowed, for example, pedestrians standing on the sidewalk or cyclists riding in the bike lane. Permitted lane use describes people engaged in legal accessing or egressing actions, or a person, object, or vehicle legally standing on some portion of the street. Incorrect lane use includes people traveling the wrong way or in the wrong lane, including very brief encroachments into a lane designated for another mode of transportation, or a person, object, or vehicle illegally standing on the roadway. When the stimulus or reactor participants do not all share the same lane use, the designation of multiple lane use is given to describe an interaction involving any combination of correct, allowed, or incorrect lane use.
Two additional variables describe the stimulus. One describes whether the stimulus participant was doing their job during the interaction, or whether a vehicle or object was left on the roadway by a worker (e.g., delivery person and their van or barrow). The other, similar to the outcome variable, is a categorical variable describing whether and how the stimulus participant reacted to the reactor during the interaction.
Listed under the reactor, all models include a binary variable describing the stimulus and reactor participants’ relative direction of travel. When traveling in opposite directions, it is assumed the participants are more likely to see one another in the moments before their interaction and this may influence how they each react.
As can be seen in Table 1, the final model for each outcome includes different sets of variables and different versions of given independent variables. For example, the model for no reaction included a binary stimulus lane use variable because the summary statistics revealed that the categorical versions of the lane use variable were not good fits. Additionally, the models for the outcomes of adjusts or yields and lane exiting include different categorical versions of the stimulus lane use variable.
Finally, the significant results of the analysis are used to inform the assessment of the impact the inductively or deductively identified interaction outcomes will have on the success of meeting goals for safety, directness, and access on streets with the two different bike lane alignments. The following section provides an overview of the assessment of the seven significant spatial variables.
Assessment of Outcomes
The BLR found three significant results specifically related to interactions occurring in street segments with on-street bike lanes: the bicycle lane alignment; the formal bicycle parking lane; and the bus stop lane. For sidewalk bike lanes, the two significant results are the bicye lane alignment and a variable describing interactions occurring near the area on the sidewalk where construction activity is taking place. Another three variables describing the specific spatial conditions of interactions were also included in models for three of the four outcomes. Each of these results are discussed below, including a qualitative assessment of the meaning the quantitative findings have for the three goals of bike lanes: safety, directness, and access.
On-Street Bike Lanes
Compared with interactions observed on streets with sidewalk bike lanes, the likelihood of the outcome of multiple reactions (B = 0.979) increases for interactions observed in street segments with on-street bike lanes. The majority of these interactions (n = 119) involve no reaction or adjusting and yielding outcomes, with a smaller number (n = 33) involving reactors exiting their lane.
These interactions frequently involve stationary vehicles (n = 90), with one-third involving cyclists reactively encroaching into the vehicle lane, suggesting a threat to cyclist and vehicle rider/driver safety and an interruption to the direct path of cyclists. Half of these interactions with multiple reactions (n = 74) involve a stimulus engaged in an accessing or egressing action, mainly pedestrians crossing the street mid-block (n = 32) and, less often, a vehicle driver pulling into or out of the bus stop lane at Site 2 (n = 23). Very few interactions resulting in this significant outcome involve cyclists engaged in accessing behaviors or incorrect lane use, aside from reactive encroachments into the vehicle lane. This suggests that the main threat to access for on-street bike lanes is the accessing behaviors of other road users who must cross the bike lane to reach their destination.
Bicycle Parking Lane
This variable describes interactions occurring on the west side of Site 1, adjacent to the bicycle parking racks located in the parking lane and on the outside of the sidewalk. In a recent study involving this same street segment, the availability of bicycle parking supported a positive assessment of the segment’s bikeability ( 18 ). The bicycle racks afford much needed access to secure parking for people cycling to the university. Nevertheless, our results suggest the bicycle parking may represent concerns for safety and directness because these facilities are associated with an increased likelihood that reactor participants will exit their lane (B = 1.021) to negotiate an interaction.
With only 34 interactions having this outcome near these facilities, this is a minor concern. Only three of these interactions involve a cyclist accessing or egressing the bicycle parking, providing evidence that intended use of the on-street bicycle parking lane very rarely results in lane exiting. Rather, the most common cause of lane-exiting reactions is stationary vehicles standing in the bike lane (n = 19) on the northern portion of the segment where the bicycle racks are on the sidewalk. Most often, the vehicles were standing there for less than 3 min; however, some delivery vehicles obstructed the roadway for longer periods of time. Therefore, the concerns for safety and directness are stationary vehicles obstructing normal flows of traffic, offering evidence that the main issue is insufficient access to loading zones outside of the university’s main entrance.
Contrary to the finding for all interactions observed in the on-street case study street segments, the bicycle parking at Site 1 is associated with a decreased likelihood of multiple reactions (B = −1.739). This suggests interactions at this location are less complex and is explained by almost all interactions near the bicycle parking facilities only involving one reactor participant.
Bus Stop Lane
This variable describes interactions observed on the street or sidewalk next to the bus stop lane at Site 2. At intersection locations, research has found bus stops increase the instances of crashes involving cyclists ( 19 ). However, this case study of a mid-block bus stop observed no crashes and finds the bus stop lane is associated with a decreased likelihood of the outcome of all reactors exiting their lane (B = −1.190). Of the 439 interactions observed adjacent to this facility, only nine resulted in this outcome and only one involved a bus accessing or egressing the bus stop. Although this variable was not significant for interactions stimulating multiple reactions, only 24 interactions resulting in multiple reactions by the bus stop lane involve any reactors exiting their lane and none are stimulated by reactors accessing or egressing the bus stop lane. When buses are involved in interactions, they are typically parked very near to or slightly within the unbuffered on-street bike lane.
The infrequency of lane-exiting outcomes by this bus stop lane may be explained by the topography and vehicular traffic flows on the street segment. There is a downhill slope in the eastbound direction that increases the speeds of those traveling alongside the bus stop lane. Additionally, the vehicular travel lane is frequently occupied by either fast-moving vehicles and a high volume of vehicular traffic or both. These factors may explain why the majority of interactions by this bus stop lane result in yielding or small adjustments in the bike lane, as opposed to movements into the busy vehicle lane. Based on the regression results, this analysis did not find strong significant evidence that the bus stop has either a positive or negative impact on any of the three goals for the bike lane: safety, directness, and access.
Sidewalk Bike Lanes
Compared with interactions taking place on streets with on-street bike lanes, sidewalk bike lanes are significantly associated with an increased likelihood of the outcome of adjusting or yielding (B = 0.740). In total, 70% (n = 1222) of interactions observed on the street segments with sidewalk bike lanes result in this outcome. These interactions are most frequently stimulated by normal pedestrian activities on the sidewalk, with cyclists traveling in the sidewalk bike lane moving further away from the sidewalk itself while passing sections of the sidewalk occupied by moving or stationary pedestrians. This outcome frequently dan obstruction on the sidewalk, for example, a parking ticket kiosk (n = 224), café chairs (n = 91), a temporary traffic sign (n = 84), dumpsters (n = 68), or other objects left on the sidewalk (n = 132). These obstructions limit the functional width of the sidewalk, forcing pedestrian traffic closer to the bike lane and increasing the likelihood of an interaction with cyclists in the sidewalk bike lane. Other interactions resulting in yielding or adjusting are stimulated by road users traveling in the wrong lane or the wrong way (n = 199) or stationary vehicles standing near the bike lane (n = 91). Finally, 10% (n = 122) involve stimulus or reactor participants engaged in accessing or egressing actions, including accessing parked vehicles (n = 51) or a travel lane (n = 59), or crossing the street (n = 53).
These results indicate the main concern for safety in sidewalk bike lanes is the mutual exposure of cyclists and pedestrians. This finding provides evidence supporting Parkin’s ( 16 ) argument that sidewalk bike lanes neither allow cyclists to travel at speed nor provide space for a comfortable pedestrian environment. Because of their closeness, the barrier-free design affords minor, but frequent interruptions to directness for cyclists and pedestrians who are often unable to travel on a straight path in their lane. However, no evidence was found that suggested accessing and egressing actions play a major role in most common outcomes associated with interactions in street segments with sidewalk bike lanes.
Construction Activity Obstructing Sidewalk
This variable describes interactions observed near the area where construction activity is obstructing a portion of the sidewalk at Site 4. Initially, the portion of the street with this feature was not included in the study because it is near the intersection. However, many interactions involving cyclists moderating their behavior were observed far in advance of this obstruction in preparation for an interaction occurring by the area in question. Of 85 interactions observed in the bike lane next to or approaching the sidewalk obstruction, 78 resulted in the significant outcome of cyclists slowing down or adjusting their position in the bike lane (B = 1.703).
As is found for all interactions in sidewalk bike lanes, this obstruction caused pedestrians to walk on or very near to the bike lane. Unlike the other sidewalk obstructions, which are not significantly associated with any outcome, the construction activity obstructed nearly the full width of the sidewalk. This finding logically reveals that major obstructions on sidewalks disrupt directness for both pedestrians and cyclists and expose them to potentially unsafe interactions. Moreover, the area around the construction activity is used for informal bicycle parking, exposing cyclists to accessing behaviors and bicycles and mopeds parked at the edge of the bike lane. If access to formal bicycle facilities had been provided, it is possible some of these interactions may have been avoided.
Other Spatial Variables
The three variables discussed below describe specific facilities located near to where interactions were observed.
Occurs Near Bike Lane
This variable describes interactions occurring on or immediately adjacent to the bike lane. Interactions occurring away from the bike lane would include those occurring in the vehicle lane at Sites 3 and 4 or on the sidewalk at Sites 1 and 2. Therefore, this variable compares interactions occurring directly in or near to the bike lane with those resulting from cyclists traveling away from their dedicated bicycle facility. The analysis found that interactions occurring in or near the bike lane are associated with a significant decrease in the likelihood of the outcome of adjusting or yielding (B = −1.139). This negative association with adjusting and yielding suggests that when cyclists travel away from the bike lane, they are more likely to experience interactions involving mild interruptions to safety and directness. However, because the bike lane is not significantly associated with other outcomes, this study cannot confirm whether these interactions protect against unsafe lane exiting or help create conditions for no reaction outcomes, which is the ideal situation.
Of the interactions observed on or near on-street bike lanes, 42% (n = 280) did not result in the outcome of adjusting or yielding. Most of these result in no reaction (n = 104) or multiple reactions (n = 119). Half of these interactions (n = 137) involve accessing behaviors, primarily pedestrians crossing the street (n = 62), which result in no reaction (n = 29) or multiple reactions (n = 28), very rarely involving any reactors exiting their lanes. For interactions observed on or near sidewalk bike lanes, 25% (n = 406) do not result in adjusting or yielding. Most of these result in no reaction (n = 227) or lane exiting (n = 109). One-third (n = 134) of these interactions involve accessing behaviors, of which pedestrians accessing or egressing parked vehicles (n = 51) is the most common stimulus action mainly leading to an equal number of no reaction (n = 21) and changing lane outcomes (n = 23).
The descriptive circumstances of these interactions suggest access plays a stronger role in on-street bike lanes than sidewalk bike lanes. It is logical that pedestrians crossing the street is a more prevalent stimulus action on or near on-street bike lanes because they are barrier free along the length of the street. However, the design of sidewalk bike lanes hinders movement between the motorized and non-motorized spaces. This suggests that access is both afforded by and a hindrance for on-street lanes, whereas the design of sidewalk bike lanes inhibits frequent access and is only occasionally hindered by accessing behavior.
Occurs Near Bike Lane Buffer
This variable describes interactions observed in a bike lane immediately adjacent to a buffered parking lane, including by the parking lanes on the north and south sides of Site 1 and Site 2 and the bike lane on the west side of the street at Site 3. At these locations, the interactions are significantly associated with increased likelihood of both no reaction (B = 0751; n = 244) and multiple reactions (B = 1.033; n = 158). Of the multiple reaction outcomes, very few involve lane exiting and 76% (n = 120) involve no reaction or adjusting or yielding outcomes.
These results agree with guidance and findings that buffers can and should be provided because additional lateral width alleviates potential conflicts with the adjacent parking lane ( 5 , 16 , 20 , 21 ). This notwithstanding, very few interactions with these significant outcomes on streets with on-street bike lanes (n = 8) and sidewalk (n = 9) bike lanes involve someone accessing or egressing a parked vehicle, and only one interaction involved a driver crossing an on-street bike lane to park. Although these outcomes are not significant, most interactions involving people accessing or egressing a vehicle parked by a buffer result in lane exiting (n = 9) or adjusting or yielding (n = 38). Rather, the most common accessing action observed that involved the buffers was pedestrians crossing the street who stood in the buffer waiting to cross the on-street bike lane (n = 73). This suggests that the buffers may not be serving their purpose of protecting cyclists from activities related to the adjacent parking lane; however, the buffers appear to help create safer conditions for pedestrians and cyclists where mid-block crossings are frequent.
The most common stimulus of the significant interactions near buffers is cyclists passing other cyclists, which occurs more often in street segments with on-street bike lanes (n = 53) rather than sidewalk (n = 18) bike lanes. Although the additional width of the buffer is associated with the slower cyclists having a direct path of travel while being passed, most passing cyclists moved to the sidewalk or vehicle lane to complete their pass. Considering the apparently safe and direct outcome for the reactor, this study supports existing findings that buffers make people feel safer and more comfortable ( 22 , 23 ). However, these benefits of the buffer do not extend to faster moving cyclists who put themselves in unsafe positions in adjacent travel lanes to pass slower cyclists. This may indicate that the width of the case study bike lanes and buffers may be insufficient to accommodate the volume of local bicycle traffic.
Occurs Near Driveway
This variable describes interactions occurring in or immediately adjacent to any of the driveways located at all four case study sites. Driveways are cited as points of potential conflict ( 24 ) and, indeed, 36% (n = 926) of all interactions were observed at driveway locations. Most (n = 526) result in adjusting or yielding; however, this spatial feature is not significantly associated with this outcome. In fact, this variable was only found to have a significant association with the outcome of multiple reactions (B = 0.389), with most of these interactions involving no reaction or adjusting and yielding outcomes (n = 65 of 95) and most involving lane exiting on streets with sidewalk bike lanes. This relationship between multiple reactions and driveway locations is not surprising. The extra paved surface adjacent to the bike lane affords more space for different reactor participants to react to a stimulus in the way most suited to themselves.
Of all interactions occurring near driveways, only 32 involved participants accessing or egressing the driveway and only five resulted in multiple reactions. Over half (n = 55) of the multiple reaction outcomes near driveways involve no accessing or egressing actions. Based on these results, the access between the street and off-street parking afforded by these driveways does not contribute to significant findings. However, the circumstances of these interactions do present threats to safety and directness.
Half (n = 24) of the interactions observed near driveways located next to on-street bike lanes were stimulated by vehicles illegally parked in or near the driveway. This provides evidence that when drivers use the driveway for short-term parking, their vehicle interrupts the functions of the adjacent bike lane. In street segments with sidewalk bike lanes, these interactions typically involve cyclists traveling the wrong way or on the sidewalk. Incorrect lane use also contributes to the remaining multiple reaction outcomes for on-street bike lanes. This misuse of the roadway suggests network- and block-level shortcomings in relation to directness, and possible threats to safety, especially for interactions involving lane-exiting behaviors.
Discussion
Returning to the original question of which bike lane alignment better meets bicycle transportation goals, this grounded theory-driven observational study confirms trade-offs that may be obvious to even the casual observer. Cyclists traveling on streets with sidewalk bike lanes frequently experienced minor interruptions to their safety and directness because of their exposure to normal pedestrian activities. Where sidewalk conditions are obstructed by stationary pedestrians or objects, the functions of the bike lane are threatened. Where on-street bike lanes are in place, fewer interactions are experienced but the potential threat to safety is greater because of the exposure to vehicular traffic. Many interactions in on-street bike lanes were caused by stationary vehicles using the lane or driveway for short-term parking because of a lack of access to loading zones on the street blocks. For both lane types, adding a buffer as narrow as 0.5 m can have a positive impact on safety, directness, and access.
As early as the 1980s, cyclists in Munich complained specifically about conflicts with pedestrians in the city’s sidewalk bike lanes and had identified parked vehicles as the main obstruction in on-street lanes ( 1 ). Four decades later, this study has reaffirmed these issues and, unfortunately, suggests the problems have yet to be alleviated adequately. These results may be obvious, but they are meaningful because they were derived inductively free of deductive assumptions about what role these various spatial features play in cyclists’ interactions. Looking forward, rather than accepting these known troublesome trade-offs, we conclude that for either type of lane alignment to meet its conceptual goals, these persistent problems must finally be addressed by giving more space to pedestrians and cyclists and finding innovative solutions for short-term vehicular parking on urban streets.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: C. Silva, R. Moeckel, K. Clifton; data collection: C. Silva; analysis and interpretation of results: C. Silva; draft manuscript preparation: C. Silva. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by a scholarship for doctoral research the Hans-Böckler-Stiftung.