
Abstract
Background and aim:
Sensory feedback systems have been of great interest in upper-limb prosthetics. Despite tremendous research, there are no commercial modality-matched feedback systems. This article aims to introduce the first detachable and feedback add-on option that can be attached to in-use prostheses.
Technique:
A sensory feedback system was tested on a below-elbow myoelectric prosthesis. The aim was to have the amputee grasp fragile objects without crushing while other accidental feedback sources were blocked.
Discussion:
A total of 8 successful trials (out of 10) showed that sensory feedback system decreased the amputee’s visual dependency by improving awareness of his prosthesis. Sensory feedback system can be used either as post-fabrication (prosthetic add-on option) or para-fabrication (incorporated into prosthetic design). The use of these direct feedback systems can be explored with a current prosthesis before ordering new high-tech prosthesis.
Clinical relevance
This technical note introduces the first attach/detach-able sensory feedback system that can simply be added to in-use (myo)electric prosthesis, with no obligation to change prosthesis design or components.
Background and aim
Sensory feedback systems (SFSs) have been of salient interest in upper-limb prosthetics. Numerous studies have shown that supplementary feedback can increase awareness of applied force, body awareness, and grip accuracy while at the same time decrease visual dependency and mental effort, specially for the blind and/or double amputee.1–9
Although sensory feedback has been a topic of investigation since 1960s,8–13 no commercially available modality-matched (direct pressure) feedback system has touched the market so far.
The aim of this technical note is to introduce the first attach/detach-able sensory feedback add-on option that can be added to amputee’s current prosthesis, with almost no change to prosthesis components and socket.
Technique
After a desktop pilot, the developed SFS was tested on a volunteer veteran amputee. After explaining the purpose and procedures of the study, the subject provided voluntary informed consent to participate. The subject was a 54-year-old male with traumatic bilateral amputation and 32 years of experience with electrical prosteses. This research was approved by the ethics review board of University of Social Welfare and Rehabilitation Sciences (USWR) to ensure all procedures and components were completely safe for the subject.
The target prosthesis was a below-elbow myoelectric prosthesis at the right side (dominant limb before amputation). At the left side, he used a mechanical above-elbow prosthesis for overall core balance and appearance. The length of the stump was relatively short (7 cm), with normal sensation of the pressure. No analgesic, alcohol, or drugs were used by the participant 1 week before the test. The prosthesis was an Ottobock System Electric Hand with following features: maximum grip force of 90 N, maximum opening of 10 cm, maximum speed of 13 cm/s, 14 and a 7.2 V rechargeable battery.
The SFS consisted of three sections. An Interlink model 400 force-sensitive-resistor (FSR) sensor (Figure 1(a)) detected contact force. FSR sensor was selected because it could be used with no interference with the structure or the components of the hand. However, the sensor has less than 0.5 mm thickness and could sense the grip force with minimal alteration of the mechanics of the grip. Electronics (Figure 1(b)) supplied power and control signals to the actuation mechanism (Figure 1(c)). Electronics included surface mount devices (SMD) on a custom printed circuit board (PCB) and an Atmel ATmega8 microprocessor (3.6 mA consumption at 4 MHz, 25°C). The actuator mechanism was a micro servo (Tower Pro 9g) consisting of a motor, a gear box, and a potentiometer to detect the position of the actuator lever. It was previously used in similar prosthetic research 15 to provide vertical pressure on forearm. Overall weight of SFS including the sensor and cables was 25 g (2.9% of the prosthetic weight). An additional 9 V battery (Camelion block 6F22) was used. It weighed 37 g and could provide an average of 500 mAh under typical current drain of 15 mA. SFS consumed 10 mA when sensor was not loaded and average of 45 mA (standard deviation (SD): 6 for 10 repetitions) when the sensor was loaded and the actuator was pressing on the skin. The dimensions of the electronic board were 38 mm × 30 mm × 13 mm. It was fitted to the prosthesis shell between the socket and the wrist unit. Calibration was performed, before and after installation, by two SMD trimmer potentiometers to adjust the “start point” and the “range” of the actuator excursion so that the subject was both comfortable and able to discriminate the direct force feedback from the sensor.
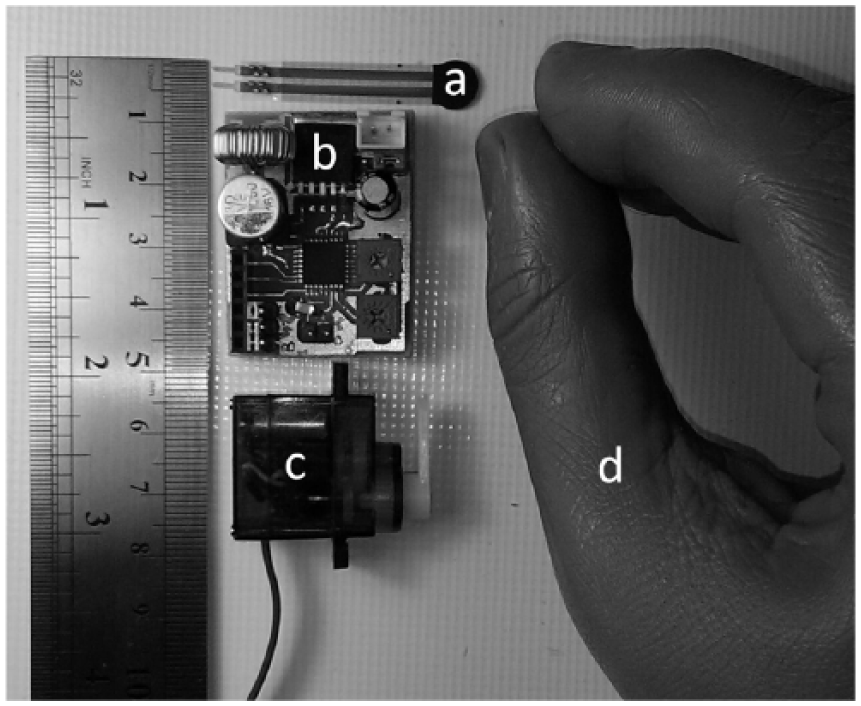
Sensory feedback system (SFS) consisted of a sensor (a), electronics (b), and the actuator mechanism (c) compared to size of the prosthetic hand (d).
As shown in Figure 2, the sensor was attached on the index fingertip, where it was evaluated to have the highest peak pressure during grasping and crushing the test objects. The objects were disposable shot glasses, made of non-flexible polystyrene. An average of 27.81 N (SD: 1.57) of grip force (10 trials) resulted in crushing the shots. The actuator was placed on the volar aspect of the subject’s arm (just above the socket) and was secured by a stretchy cuff (Figure 2(e)). The cuff was adjusted to comfortably hold the feedback actuator in place, with the subject’s preferred comfortable pressure.
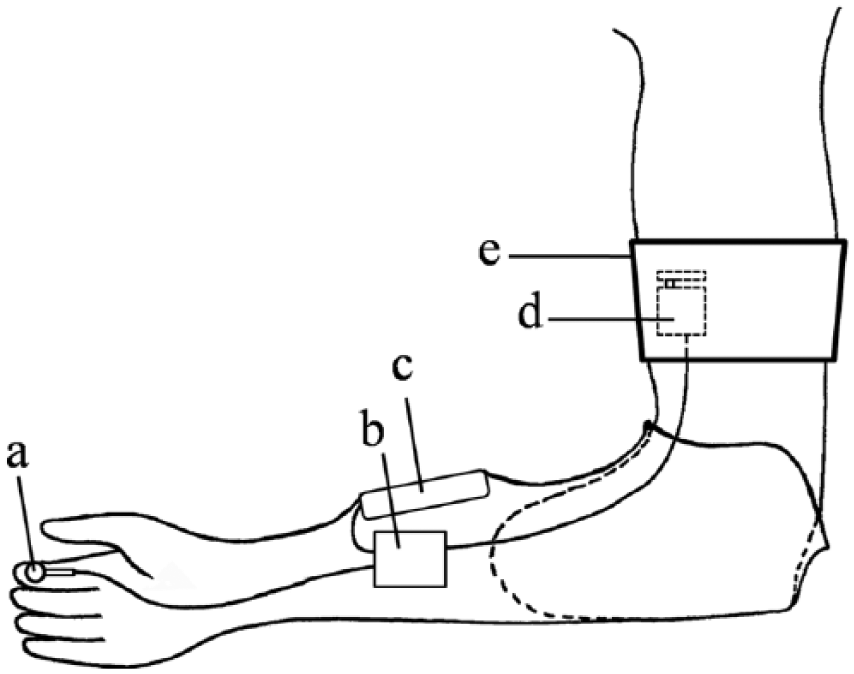
Schematic overview of the sensory feedback system (SFS). Grip force from the FSR sensor (a) is estimated and converted into a position (angle) reference signal via the process unit (b). Power from the battery (c) and control signals are sent to the actuator mechanism (d) which is secured on his arm by a stretchy cuff (e).
Before adding SFS to the prosthetic system, the subject (with closed eyes) was unable (three sequential fails) to grasp the object without breaking it. After 15 min of practice, the subject could effectively control grip force even with his eyes closed. At this point, he was considered to be ready for the experimental procedure. The goal was to grasp the shots without crushing them, relying only on the sensory feedback device. The subject was asked to grasp a shot that was pre-positioned between the thumb and index finger of the prosthesis. He lifted the glass after obtaining a secure grasp to show the end of trial, an event that was defined as “success” of trial. If the shot was crushed or dropped, the trial considered as “failed” and end of the trial was announced through the headphones. A total of 10 trials were completed.
To prevent proprioceptive feedback, that is, awareness of the weight of the object or accidental contact with the object, the subject was asked to sit behind a table with 85 cm height and lay his hand comfortably on the table. Visual feedback was eliminated by blindfolding the subject. Auditory feedback was eliminated using a pair of closed-back dynamic studio headphones (ICON HP-360) to diminish ambient auditory cues from prosthesis operation. Verbal cues for start and end of each trial were also provided through the headphone. To further reduce auditory feedback, white noise was played during trials considering the subject’s preferred comfortable loudness.
Discussion
The subject managed to “successfully” grasp objects in 8 (out of 10) trials. Overall, two failed trials (Nos 4 and 5) were recorded. In the first failed trial, the object was crushed, while in the second one the object was released before lifting from the table. The subject was aware of failing (“end” command from the headphones before lifting the prosthesis) and explained that as he crushed the first object (fourth trial), he tried to release pressure and prevent the second object from breaking in the subsequent (fifth) trial, a matter that resulted in opening of the hand.
The SFS consumes power and adds weight to the prosthetic system, but it provides the subject with awareness about the fingertip force within the prosthetic hand. Even with minimal training (15 min), the subject could efficiently control the prosthesis indicating augmented awareness of holding an object without crushing it. The correction in trial 5 suggests that the subject could be trained to obtain higher performance skills.
An advantage of SFS system is interchangeability of the sensor and actuator mechanism that leads to easier maintenance and repair. Even with the success 16 of targeted muscle re-innervation (TMR) and targeted sensory re-innervation (TSR) procedures,17–22 such modality-matched direct pressure feedback devices seem necessary to provide proportional feedback from the hand force during grasping (or non-grasping) tasks in prosthetics and robotics.23–26
There were limitations to the current preliminary study. The vibration cues from the motor in the prosthesis were not blocked because SFS system was mounted on the already in-use prosthesis with no change to the prosthesis construction. Using FSR on cosmetic glove led to a reduction in sensor output. The reason for that reduction was the pliability of the soft material that is essential to provide a skin look and grip friction for the prosthetic hand and consequent re-calibration of SFS. With an alternative controller program, a strain gauge can be used as an input sensor for more accurate sensing and permanent use under the hand covering. In such cases, feedback actuator mechanism can also be incorporated into the socket design, and the power can be supplied from the prosthesis battery.
A drawback of SFS was step-wise motion in intervals of 15° (spatial resolution) for the actuator servo system. Such sudden jerks induced a “distracting” feeling to the subject, as reported by the subject which was similar to previous studies. 27 The ideal motion is a continuous linear motion that can be acquired using customized hardware and controller software.
Further implications of the system during daily life and task specific performances should be explored. Other potential areas that can be recommended for future research can be as follows: impact of SFS on motor learning and control, sensory-motor integration, phantom pain, prosthetic acceptance, compliance, social communication, and quality of adopters’ life.
In conclusion, this article introduced the first detachable sensory feedback add-on option for current (myo)electric prosthesis. SFS showed acceptable primary results with a few minutes of training. Such add-on options can be useful to provide amputees with modality-matched feedback from the prosthetic grasp. SFS can also be used to experience force feedback before providing the amputee with a final high-end prosthetic system.
Key points
This study introduced the first “attach/detach-able” modality-matched (direct pressure) sensory feedback add-on option for current (myo)electric prostheses.
Small dimensions of the system allow its installation in most of the below-elbow prostheses.
SFS can be mounted on the already used prosthesis with no change of prosthetic components or design (post-fabrication), or it can be incorporated into the prosthetic design (para-fabrication).
Footnotes
Author contribution
All authors contributed equally in the preparation of this manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.