
Abstract
Background and aim:
The prosthetic options for higher level amputees are limited and costly. Advancements in computer-aided design programs and three-dimensional printing offer the possibility of designing and manufacturing transitional prostheses at very low cost. The aim of this project was to describe an inexpensive three-dimensional printed mechanical shoulder prosthesis to assist a pre-selected subject in performing bi-manual activities.
Technique:
The main function of the body-powered, manually adjusted three-dimensional printed shoulder prosthesis is to provide a cost-effective, highly customized transitional device to individuals with congenital or acquired forequarter amputations.
Discussion:
After testing the prototype on a young research participant, a partial correction of the patient’s spinal deviation was noted due to the counterweight of the device. The patient’s family also reported improved balance and performance of some bimanual activities after 2 weeks of using the device. Limitations of the design include low grip strength and low durability.
Clinical relevance
The prosthetic options for higher level amputees are limited and costly. The low-cost three-dimensional printed shoulder prosthesis described in this study can be used as a transitional device in preparation for a more sophisticated shoulder prosthesis.
Keywords
Background and aim
Prosthetic needs for children are complex due to their small size, constant growth, and psychosocial development. 1 Electric-powered units (i.e. myoelectric) and mechanical devices (i.e. body-powered) have improved to accommodate children’s needs, but the cost of maintenance and replacement makes access difficult to many families. 2 It is estimated that in the United States, more than 541,000 individuals lived with upper limb deficiencies in 2005. 3 In general, worldwide estimates for upper-limb reductions range from 4 to 5/10,000, 4 although the incidence of higher level amputations such as forequarter and shoulder disarticulations are much smaller (3% and 5%, respectively). 5
Many children with upper-limb differences from developing countries are not being fitted with a prosthesis due to a lack of trained technicians capable of providing these services and also due to a local shortage of necessary componentry for the production of upper-limb prostheses. 6 There is however a critical need for the development of practical, easily fitted and maintained, customized, aesthetically appealing, low-cost prosthetic devices for children.7,8
Advancements in computer-aided design (CAD) programs, additive manufacturing, and open source image editing software offer the possibility of designing, printing, and fitting transitional prosthetic hands and other prosthetic or assistive devices at very low cost.8–10 Recently, Zuniga et al. 8 described a popular open-source three-dimensional (3D)-printed prosthetic hand named Cyborg Beast 11 and validated a distance fitting methodology. This transitional prosthetic device can be fitted at a distance according to the patient’s needs in addition to being manufactured using small and inexpensive desktop 3D printers. Although durability, environment, and lack of printing standards for the manufacturing of 3D-printed prostheses are factors to consider when using these types of devices, the practicality and cost-effectiveness represent a promising new option for clinicians and their patients in developing countries. The purpose of this project was to design an inexpensive 3D-printed shoulder prosthesis to perform bi-manual and unilateral activities with a functional grasp. The mechanical device utilized in the study is able to achieve gross grasp by protracting the non-affected shoulder. Additionally, the prosthesis allows for manual adjustment options for wrist pronation and supination, elbow and shoulder flexion and extension, as well as shoulder internal and external rotations.
Technique
Design overview
The prosthesis used in this study is a body-powered and manually adjustable 3D-printed upper extremity device (Figure 1). The primary function of the prosthesis is to provide individuals with a congenital or acquired forequarter amputation a transitional device giving the opportunity to perform bi-manual and unilateral activities with a functional grasp. The intent of this prosthesis is twofold: (1) provide a transitional device designed for growing children that do not have access to high-end shoulder prostheses and (2) allow the child to become more familiar with a prosthesis. The device was designed to mimic a superheroes limb to make it visually appealing to children (Figures 1 and 2). The arm is designed to allow manual manipulation of the wrist for pronation and supination in addition to adjustable movement at the elbow and shoulder. Using the non-involved hand to position the upper extremity, the prosthesis can enhance a variety of bi-manual activities and unilateral movements. The functional grasp is performed through shoulder protraction of the unaffected arm. The weight of the prosthesis is 830 g with a material cost of US$200. The weight of the 3D-printed shoulder prosthesis is customized to the approximated weight of the shoulder, arm, and hand of the non-affected side of the patient. This was achieved using the methodology described by Kuemmerle-Deschner et al. 12 During the fitting process, and after wearing the device, a partial correction of the patient’s spinal deviation was noticed. The family also reported improvements in dynamic balance during functional activities. It was speculated that this postural change and improvement in balance were due to the counterbalance weight of the device.
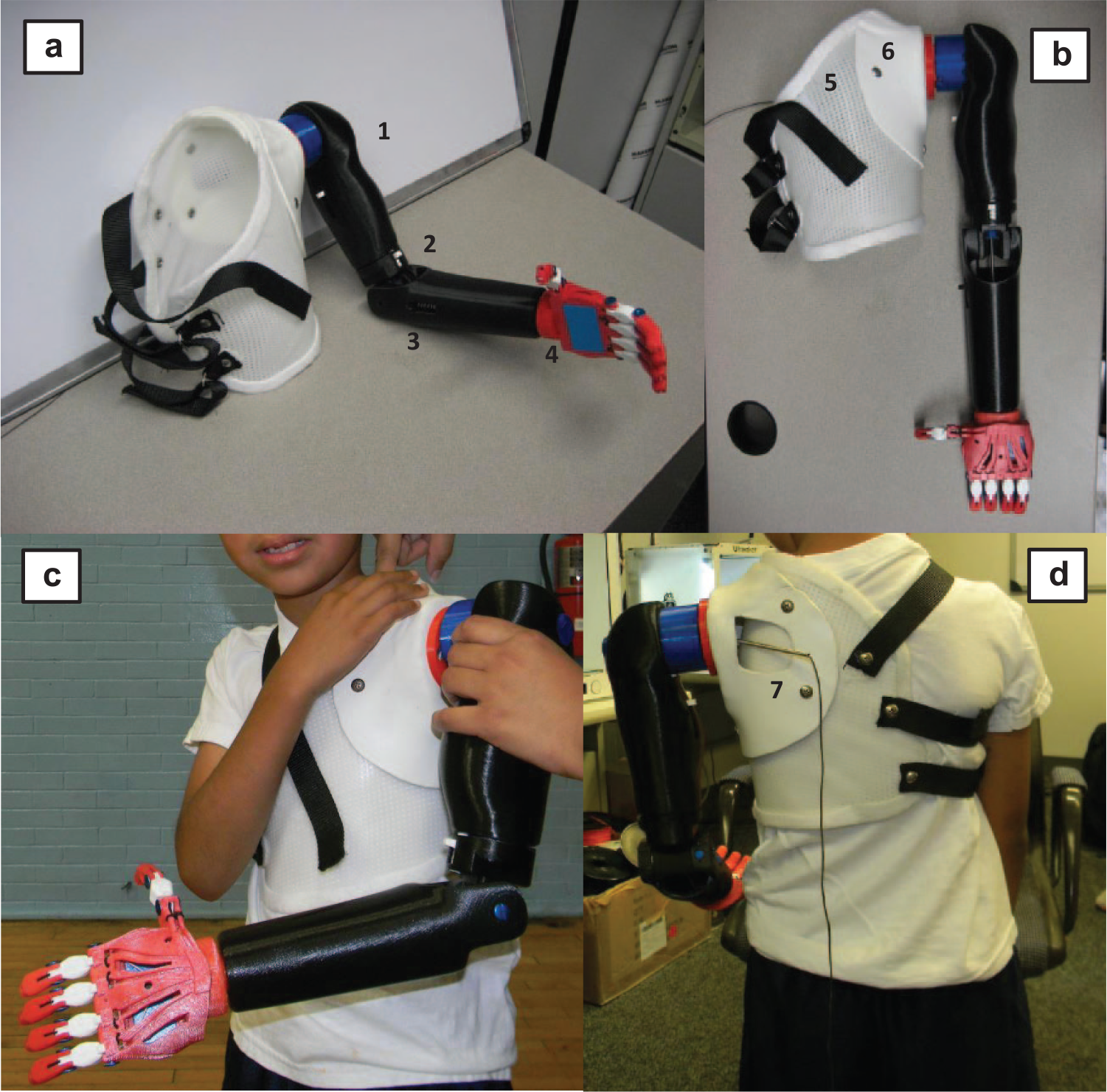
(a) Completed 3D-printed shoulder prosthesis (side view). The numbers show the spring loaded locking lever systems for (1) shoulder extension and flexion, (2) internal and external rotations, (3) elbow flexion and extension, and (4) wrist pronation and supination mechanisms. (b) Complete prostheses (front view). The numbers show the (5) shoulder socket and (6) 3D-printed cap. (c) Side view of our research subject using the 3D-printed shoulder. (d) Posterior view showing the (7) internal cabling system.
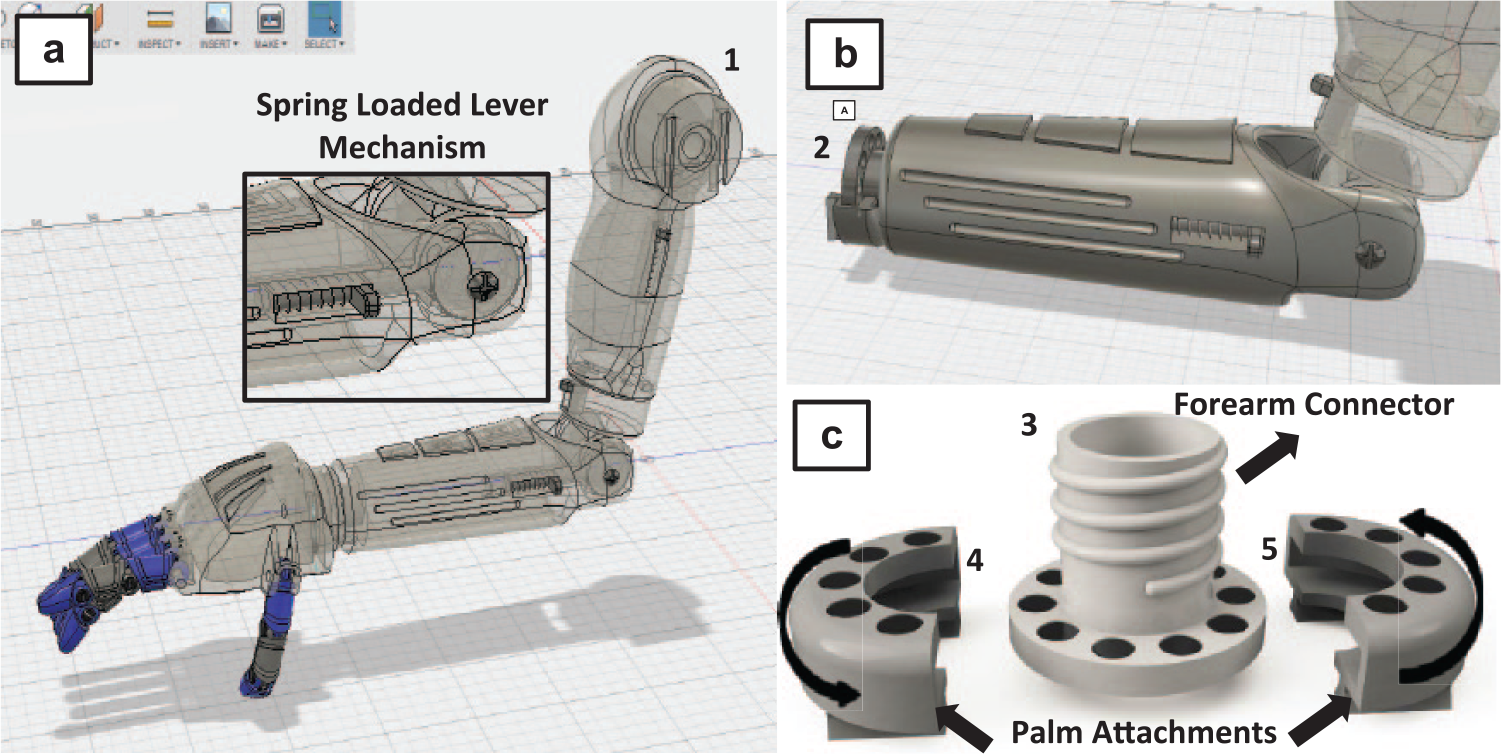
(a) Digital model of the shoulder prosthesis showing interior components, the spring loaded lever of the elbow, arm, and shoulder mechanism, as well as the wrist magnetic rotation mechanism. The number shows the (1) shoulder’s cap attachment. (b) Wrist, forearm, and elbow joint sections. The numbers show the (2) exposed rotational wrist mechanism and magnet compartment. (c) Unassembled rotational wrist mechanism. The numbers show the (3*) disc/shaft with a center opening that connects to the forearm and (4* and 5*) the bi-valve circular sleeve with slots in the bottom to connect with the palm and placed over the disc/shaft to allow the magnetic-controlled rotation.
Prototyping process
A 7-year-old boy (weight: 19.1 kg and height: 122 cm) with a congenital shoulder disarticulation received the first prototype. The study was approved by the local Institutional Review Board and the research participant completed a medical history questionnaire. The parents and child were informed about the study and parents signed a parental permission and both child and parents signed an assent.
Mechanical design
The components of the device were designed in Autodesk Inventor (Autodesk, Inc., San Rafael, CA, USA) and printed with polylactide (PLA; 1.75 and 2.85 mm) plastic, acrylonitrile butadiene styrene (ABS; 1.75 and 2.85 mm), and Taulman Nylon 680 (1.75 mm). Other components of the device included Spectra® Prosthetic Cable, standard cable housing, circular magnets (6 × 3 mm), Chicago screws of various sizes, thrust bearings (22 × 36 × 1.9 mm), springs (8 mm × 25 mm), elastic cord (1.5 mm), Velcro®, medical-grade firm padded foam, Aquaplast®-T OptiPerf™ (1.6 mm), protective skin shirt, and a dial tensioner system (Mid power reel M3, Boa Technology Inc., Denver, CO, USA). Table 1 outlines the general characteristics of the 3D-printed shoulder prosthesis.
General characteristics of the 3D-printed shoulder prosthesis.
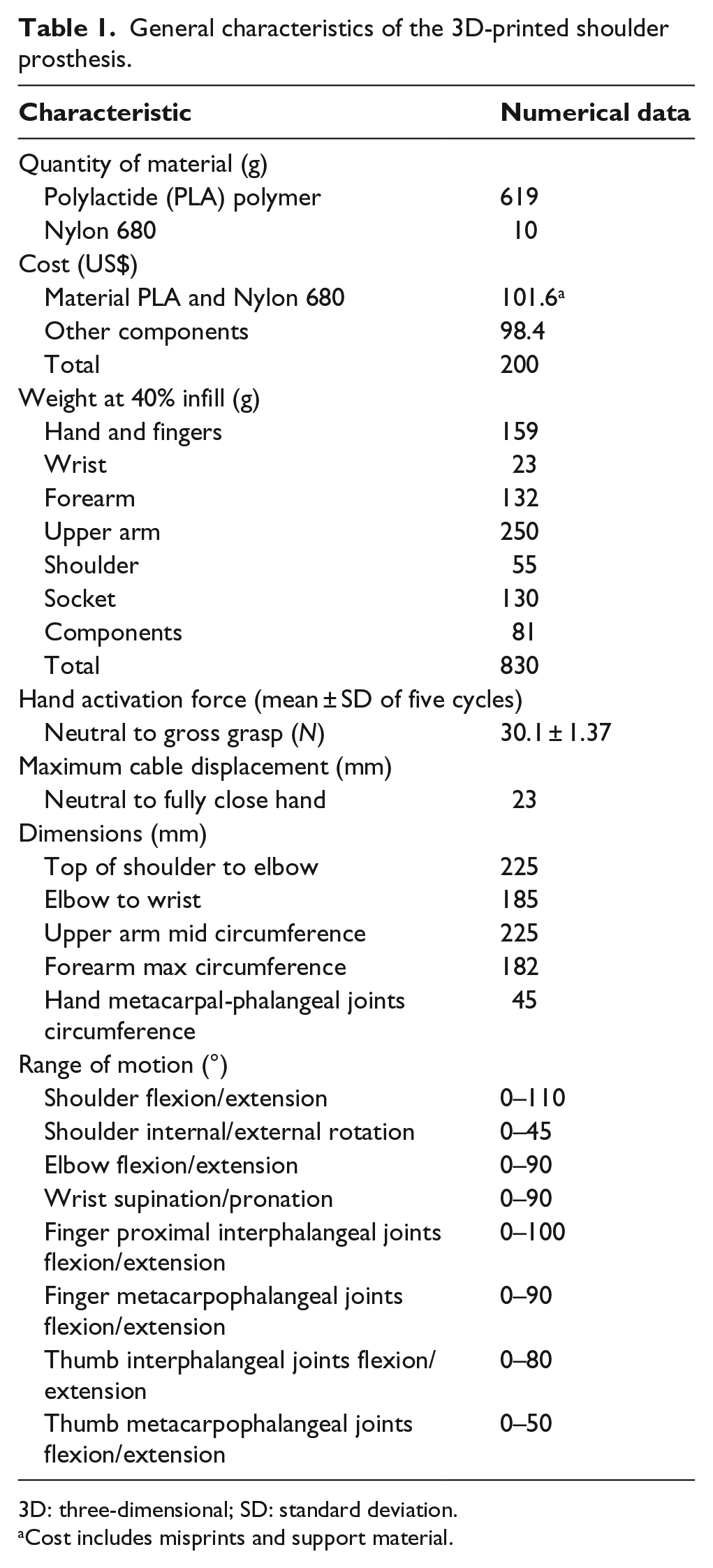
3D: three-dimensional; SD: standard deviation.
Cost includes misprints and support material.
Hand and wrist
The prosthetic hand is a voluntary closing device and has five fingers with 2 degrees of freedom (Figure 1). The finger and thumb pads are designed to provide increased friction for grasping activities. A rotation mechanism placed on the wrist allows full pronation and supination. A pivot system with internal components allows rotation of the wrist without twisting the cable line. The rotation mechanism of the wrist comprises an inner circular disc/shaft with a center opening (Figure 2(b) and (c)), and a circle of embedded magnets with matching polarity placed around the disc. A bi-valve circular sleeve with embedded magnets aligned to match the disc magnets was placed over the disc. The magnets are placed with opposing polarity to assure mutual attraction. The disc and sleeve rotate independently and are stabilized in various positions by the attraction of the magnets. The magnets were sealed in a protective sleeve for safety.
Elbow and shoulder joints
Elbow and shoulder flexion and extension, as well as shoulder internal and external rotation can be manually adjusted and locked in place using a spring loaded lever placed near the elbow and shoulder joints (Figure 2). Adjustments of the elbow and shoulder can be made every 22° for flexion and extension and 15° for shoulder internal and external rotations (Figures 1 and 2).
Socket and cap
The socket was custom made using Aquaplast-T OptiPerf (1.6 mm) by a certified prosthetist. The cap was custom 3D printed using ABS filament (Figure 1(b)).
3D printing specifications
This device was designed to be printed on a small desktop 3D printer (Makerbot Replicator 2X; Makerbot Industries, Brooklyn, NY, USA and/or Ultimaker 2; Ultimaker B.V., Geldermalsen, The Netherlands) with a building platform of 28.5 cm L × 15.3 cm W × 15.5 cm H or larger. The materials used were PLA, ABS, and Nylon 680. The 3D printers were set at 40% infill (hexagon pattern), 35 mm/s print speed, 150 mm/s travel speed, 65°C heated bed for ABS (room temperature for PLA), 0.15 mm layer height, and 1 mm shell thickness. Rafts and supports were used to 3D print the palm.
Discussion
The prosthetic options for higher level amputees, such as forequarter amputees or shoulder disarticulation, are limited and costly. Despite technological advances of electric powered units, lighter body-powered prostheses are the preferred option for children. 13 During the development of our 3D-printed shoulder prosthesis, we worked with a 7-year-old boy who tested the first prototype. During the fitting process, and after wearing the device for a period of time, a partial correction of the patient’s spinal deviation was noticed due to a change in posture. The device seemed to provide a counterbalance weight on the affected side resulting in improved posture. The weight of the 3D-printed shoulder prosthesis was customized to the patient’s weight of the shoulder, arm, and hand segments of the non-affected side. 12 The patient’s family also reported improved balance and performance of some bimanual functional activities, such as grabbing a large ball, after 2 weeks of using the device. The device did not prove to be effective for unilateral activities, due to the low grip strength. Based on the family’s feedback, it can be speculated that the functional grasp performed through shoulder protraction of the unaffected arm may be helpful for very specific unilateral activities including grasping and carrying lighter objects, such as grocery bags. Based on anecdotal evidence it is possible that the low-cost 3D-printed shoulder prostheses described in this study could be used as a transitional device in preparation for adaptation of a standard or more sophisticated shoulder prosthesis. Furthermore, the ability to print the device in this study on a small and inexpensive desktop 3D printer with different infills and densities may allow medical institutions with a low budget to offer a highly customized, low-cost option for patients.
Based on observations and feedback from the family in this study, the researchers concluded that potential limitations of the design were low grip strength and low durability of the prosthetic device. The maximal grip strength of the device was 8.3 N (0.85 kg) compared to the 88.2 N (9 kg) from the non-affected hand. The estimated pinch force of the device was 3.9 N (0.4 kg) compared to 21.6 N (2.2 kg) from the non-affected hand. In addition, the family reported malfunctioning and braking of the thumb metacarpophalangeal joints of the device after a month of use which is a concern that needs further exploration.
The use of 3D printing technology for the design of upper limb prostheses remains in early-stage development; however, improved technology may soon compensate for the limitation of low durability in lower cost devices. Finally, inclusion of a certified prosthetist or upper limb specialist on a research team is crucial for the proper development, fitting, and use of upper limb 3D-printed prostheses.
Key points
Improvements in functional balance and spinal deviation due to improved posture;
Designed for bilateral activities;
Printed on small low-cost desktop 3D printers;
Highly customizable prosthetic option;
Used as a transitional or training device.
Footnotes
Acknowledgements
We would like to thank our patient and his family for their assistance during the development of the shoulder prosthesis. In addition, we also thank the students from the 3D Research & Innovation Laboratory at Creighton University for their support in the project.
Author contribution
All authors contributed equally in the preparation of this manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was funded by the non-profit organization “Git-R-Done Foundation” and The Dr. George F. Haddix President’s Faculty Research Fund.