
Abstract
This brief note addresses a common confusion in continuum mechanics, particularly in axially moving beams, strings and plates, where certain terms arising from the material derivative are mistakenly labeled as “Coriolis acceleration” due to their mathematical similarity to the Coriolis expression. We clarify this misinterpretation using definitions of Coriolis, convective and gyroscopic terms, and show that these terms are not Coriolis accelerations when viewed in fixed reference frames. In addition, we briefly comment on the meaning of the Coriolis inertial force whether it performs mechanical work and how such mislabeling affects teaching, computational modeling and the interpretation of vibration problems.
Keywords
Introduction
Coriolis acceleration is a fundamental concept in the field of dynamics arising when motion is described relative to rotating coordinate systems. Its classical form,
Theory
Although well known in the mechanics community, we reiterate the expression for Coriolis acceleration within absolute acceleration formula to better set the stage for our discussion.

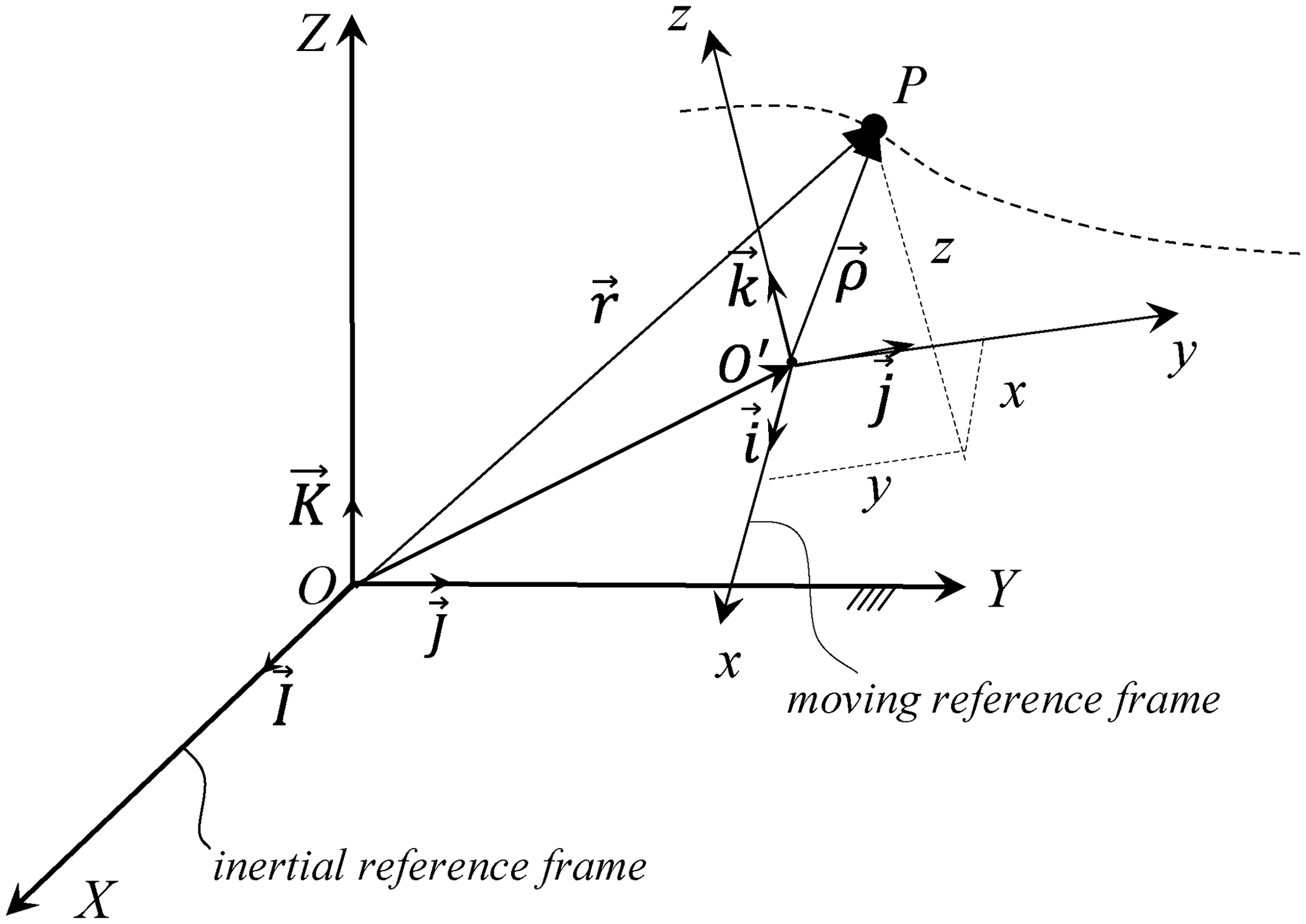
Inertial and moving reference frames.
The final term is the so-called Coriolis acceleration, which is our focus:

It should be emphasized that the Coriolis acceleration appears only when the position vector, velocity and absolute acceleration of the material point are expressed with respect to a moving intermediate coordinate system. On the other hand, if the absolute acceleration is derived directly in a fixed (absolute) coordinate system, no Coriolis acceleration term arises.
Formal definitions and distinctions
Coriolis acceleration: Convective acceleration: Velocity-dependent terms originating from the material derivative in fixed coordinate systems, e.g.,
where

As encountered in axially moving beams or strings. These terms are not indicative of Coriolis acceleration, rather, they represent convective components associated with the transport of material points along the continuum.
Gyroscopic terms: These terms arise in Lagrangian dynamics when velocity-dependent forces appear as skew-symmetric terms in the equations of motion. They conserve energy because no mechanical work is performed.
This classification distinguishes mechanisms that may be mathematically similar but are physically distinct. A concise side-by-side summary is provided in Table 1, clarifying frame dependence, mathematical form and energy properties.
Formal comparison of Coriolis, convective (transport) and gyroscopic terms.
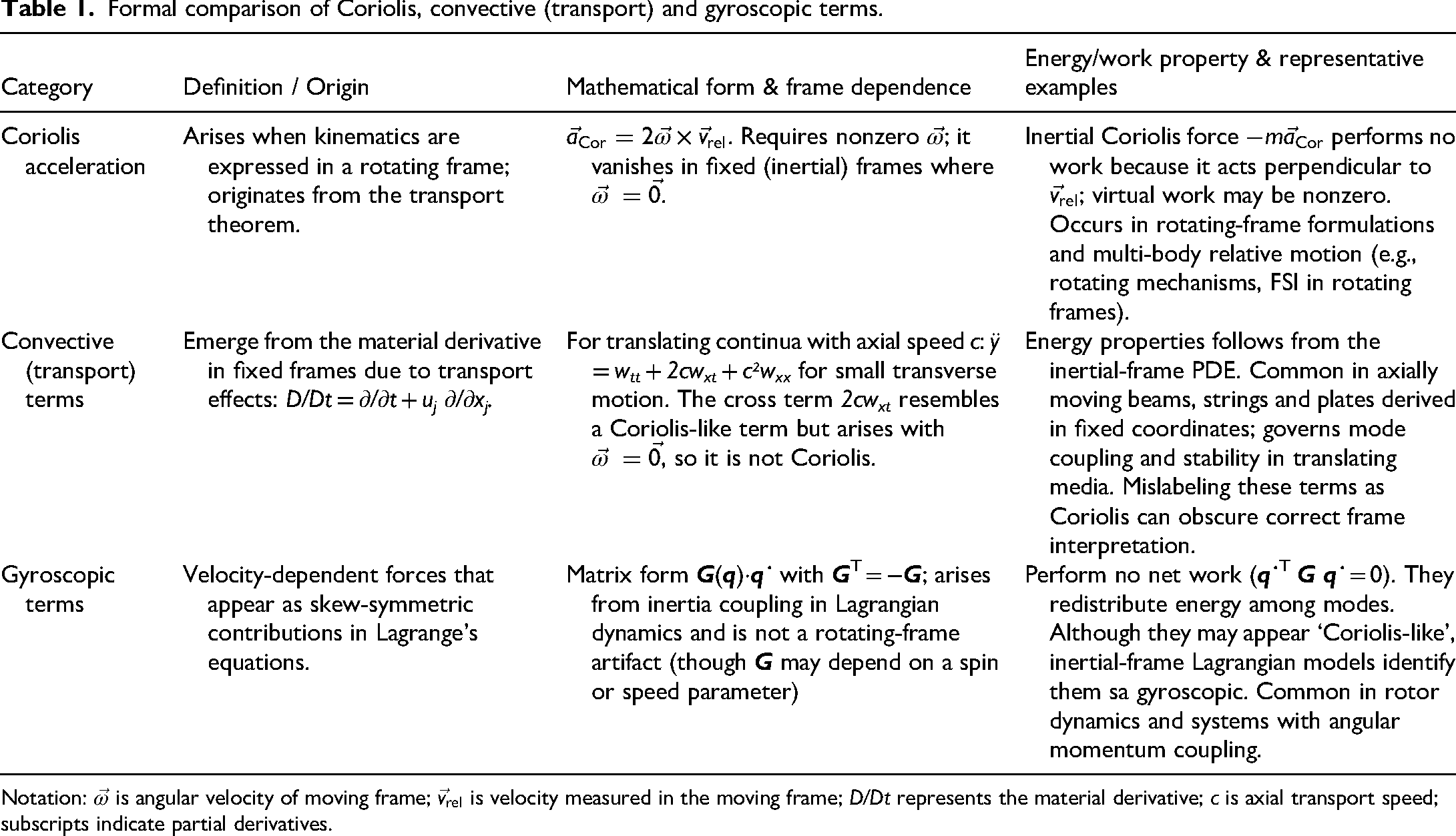
Notation:
Illustrative examples
Axially moving cable
Consider the axially moving cable shown in Figure 2.
9
The axis system OXY is fixed (absolute) with unit vectors 
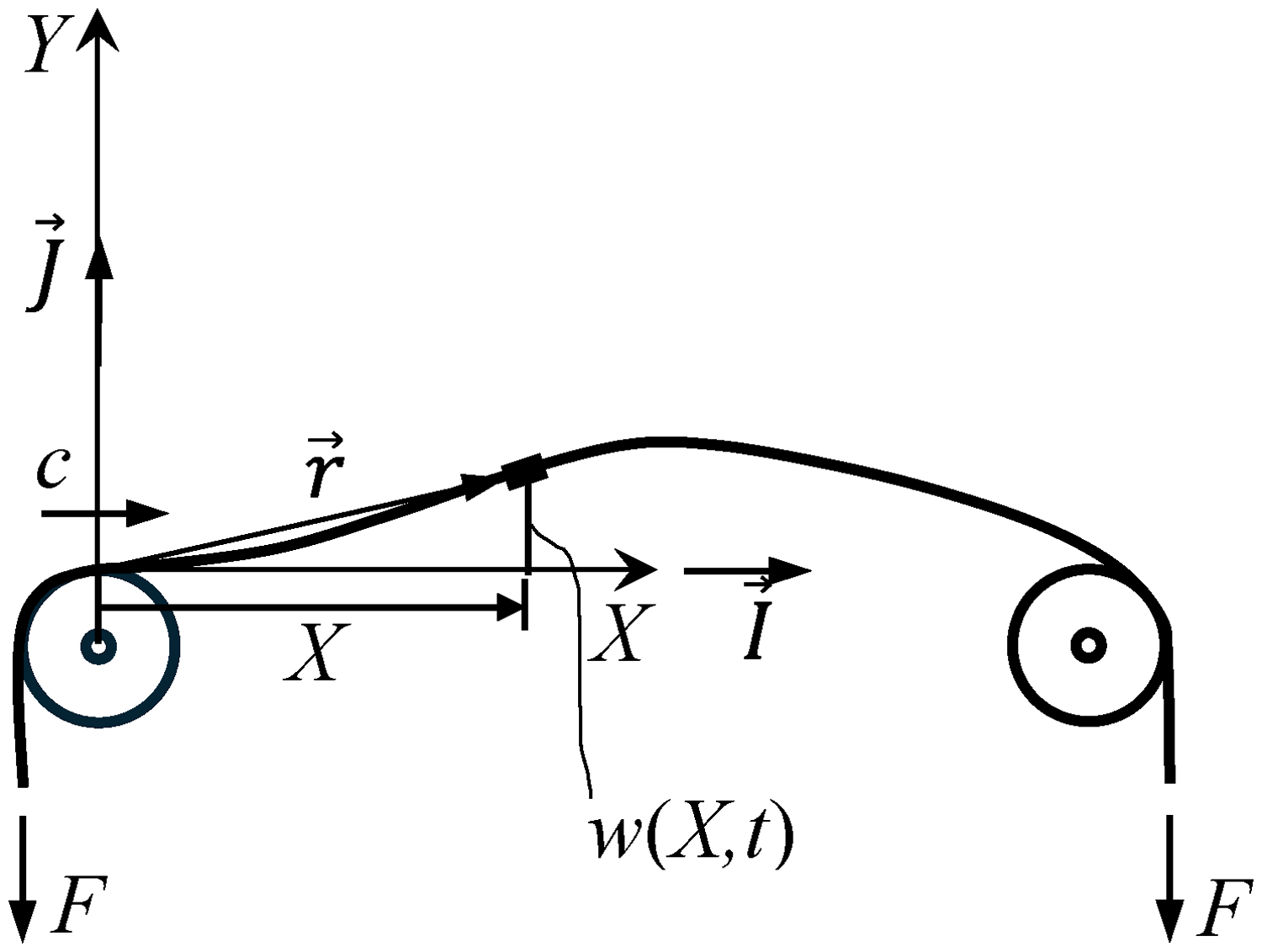
Axially moving cable (after reference 9 ).
Taking the time derivative, the absolute velocity of the element (with c denoting the axial transport speed) becomes:
Taking the time derivative of 
Using 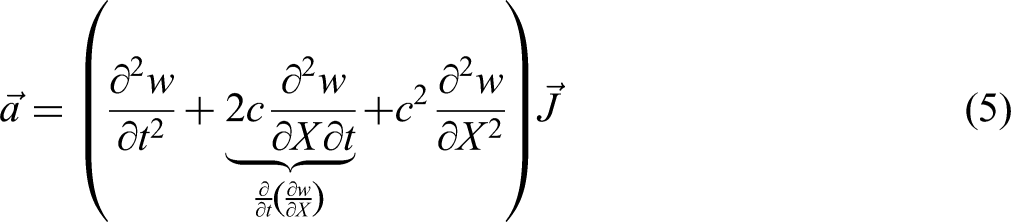
The quantity
Translating string
Another example from the literature is the translating string system shown in Figure 3 from the reference.
10
The equation of motion for transverse vibrations of the string is “The term 
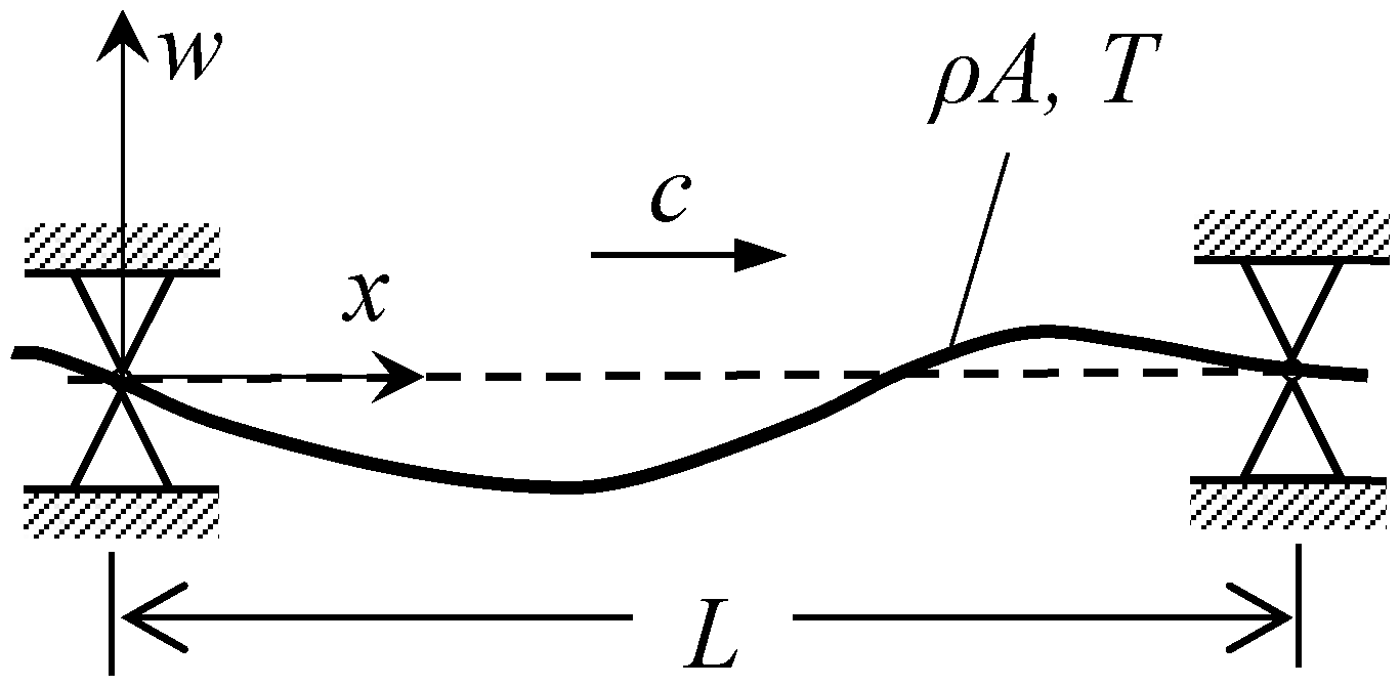
Translating string system (from reference 10 ).
However, because the reference frame used is the fixed xw-axis system, the term
Another study 11 further supports this interpretation, stating correctly that “these terms come from the second material derivative” for the first, second (the key term for our discussion) and fourth terms of the equation (6).
Now, we will give a short derivation of why the term
The position of a material point initially located at X at time t = 0 is
The absolute transverse velocity and acceleration of this material point are obtained using the material derivative in the inertial frame:

Thus, the cross term
Therefore, although
In the articles,1–8,12 (several of which we have discussed as representative examples), terms that do not correspond to Coriolis acceleration are nevertheless labeled as “Coriolis terms” merely because they share a similar mathematical structure. However, given the coordinate systems used in these works, such terminology is incorrect and can obscure the proper physical interpretation of the underlying mechanics.
Fluid-Conveying pipes
In fluid–structure systems such as pipes conveying fluid, two interacting subsystem exihibit relative motion: the pipe and the internal flow. When a rotating frame attached to the pipe cross-section is employed, the frame introduces a nonzero angular velocity
In contrast, when the same pipe–flow system is formulated in a non-rotating inertial frame (
As an example of an inertial-frame formulation, Gürgöze & Altınkaynak
15
derive the variable-mass Hamilton principle using Reynolds transport for a moving mass on a Timoshenko beam. The additional couplings terms arise from transport effects and a virtual momentum-flux boundary term; no rotating observer is introduced (
Thus, in inertial descriptions, linear-in-speed couplings originate from convective/transport effects (and appear as gyroscopic terms in state-space). The term “Coriolis” should be reserved exclusively for cases involving rotating or locally rotating reference frames.
Mode coupling and stability in translating continua
In axially moving continua, linear (convective/gyroscopic) and quadratic (transport/ “centrifugal-like”) speed-dependent terms modify the spectral properties, causing mode coupling and potential instability as sufficiently high speeds. A standard semi-discrete representation takes the form
Rezaee & Lotfan 19 extend the translating-continuum framework to small-scale and nonlocal settings analyzing axially moving nanoscale Rayleigh beams with time-dependent transport speed, Kelvin–Voigt damping and Eringen nonlocal elasticity, all formulated in an inertial frame. Through multiple-scales analysis, they map stability boundaries and demonstrate how nonlocal softening and time-dependent transport U(t) reshape frequency veering and shift flutter thresholds.
Work of the Coriolis inertial force
When discussing Coriolis acceleration, it is natural to ask whether the associated Coriolis inertia force “The work done by the Coriolis inertia force in any relative displacement is zero”
20
“Coriolis force
Both statements reflect the property evident in equation (2). Since
A similar situation arises in systems whose equations of motion are written using Lagrange's Equations. In such systems, gyroscopic forces appear through a skew-symmetric matrix called a “gyroscopic” matrix, which also represents the Coriolis-type inertia forces. 22 Since this matrix has a skew-symmetric structure, no real work is performed.
However, ambiguity exists in the literature concerning virtual relative displacements. Two references23,24 reach opposite conclusions. The first source 23 claims zero virtual work while the second states the contrary. The latter viewpoint aligns with our own, because a virtual displacement may well be in a direction that is not perpendicular to the force. Thus, while real work remains zero, virtual work may be nonzero.
We also note that asking whether the Coriolis inertia force performs work in absolute motion is not meaningful. Both Coriolis acceleration and associated inertia force are defined only with respect to a moving (rotating) reference frame and they have no interpretation for an observer in a fixed frame. 25
In summary, the Coriolis force performs no work in actual relative motion because it is always perpendicular to
Pedagogical implications
Mislabeling convective transport as Coriolis acceleration can significantly obscure students’ understanding of frame dependence. Referring to the cross-derivative
A second consequence appears in modeling practice. In modeling, students often convert PDEs into finite-difference or FEM codes and annotate terms by “physical meaning”. If
For mode coupling and stability, there are two key pedagogical points: First, mislabeling the 2Uwxt term as “Coriolis” may tempt students to conclude that “no work” implies “neutral to stability”. In fact, even though gyroscopic/convective terms do no net work, they still alter eigenstructure, enabling mode coupling and flutter. Secondly, when U varies with time, the governing PDE gains parametric terms leading to parametric spectral instabilities in addition to convective/transport effects. 26 Clear distinctions between convective, gyroscopic and Coriolis mechanisms helps students predicting these behaviors and selecting appropriate numerical strategies.
From a teaching standpoint, paired derivations can be effective; (i) first in an inertial frame using the material derivative (yielding
Assessment can reinforce these distinctions without increasing workload. For example, one may present two similar PDEs for an axially moving string, one correctly derived in an inertial frame, the other incorrectly labeled with “Coriolis”, and have students (a) re-derive the inertial acceleration from D/Dt, (b) classify each term using a comparison table (Coriolis vs. gyroscopic vs. convective) and (c) predict stability changes if c increases. In lab sessions, students can vary the
Conclusions
In this brief report, we examined a recurring issue in the literature. Certain terms in the equations of motion for axially moving beams and strings are often referred as Coriolis acceleration terms, even though they do not arise from Coriolis effects. Although they share a similar mathematical structure as Coriolis terms, these terms appear in a fixed reference frame, not a rotating one. For this reason, they should not be classified as Coriolis terms, but instead understood as convective or gyroscopic terms. In addition, the associated Coriolis inertia force performs no work during real relative motion, as it is always perpendicular to the relative velocity of the material point.
Beyond terminology, this distinction carries practical consequences for modeling and teaching. Convective and gyroscopic terms can alter eigenstructures, induce frequency veering and generate flutter instabilities without doing net work whereas Coriolis terms result solely from the choice of a non-inertial description. We hope this manuscript assists researchers and educators in formulating, interpreting and teaching translating-media problems with improved conceptual and pedagogical clarity.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.