
Abstract
Several years ago, this author introduced a reconceptualization of rigid body dynamics (RBD) through the Moving Frame Method (MFM). Years of teaching RBD using MFM have exposed significant shortcomings in traditional pedagogy. Rather than presenting a mathematical exposition of MFM, this paper critically reflects on its implementation, examining its impact, challenges, and the lessons learned from integrating it into instruction. It explores the limitations of traditional RBD instruction and demonstrates how MFM addresses these flaws and engages students. While the paper briefly touches on the method's underlying mathematical structure, its primary focus is a qualitative discussion on how the MFM reforms RBD education by modernizing the pedagogy and enhancing student engagement. The MFM integrates modern mathematical tools, elevates RBD to 3D, and replaces vector algebra with a streamlined Lie Algebra. Rooted in Lie Group Theory and Cartan's Moving Frames, MFM provides a simple and unified matrix framework. In the MFM, the same notation can be used for 2D and 3D motion, and for single- and multi-body dynamics. As a result, the discipline becomes more accessible to undergraduates, aligning with the broader theme of this reflection: how the implementation of MFM addresses shortcomings in traditional RBD pedagogy and also modernizes the discipline, enhances student engagement, and reshapes curriculum design. The MFM has broader implications for curriculum design, challenging traditional approaches to RBD education and making previous curricular assessments less relevant. Furthermore, the associated new pedagogy includes swipe learning documents, 3D animations, MATLAB codes, and over 3,000 voiced PowerPoint slides, all freely available. The paper illustrates MFM's effectiveness through real-world applications such as gyroscopic wave energy and robotic vehicles, advocating for a more inclusive, accessible approach to RBD education. Course materials spanning both Introductory and Advanced levels are freely available at http://movingframe.org.
Keywords
Introduction
Universities face mounting challenges, from declining enrollment and financial pressures to growing student disengagement. This disengagement is compounded by the ubiquity of digital distractions, the unremitting delivery of world crises to mobile devices, and the lingering effects of a pandemic's isolation during their formative years.
At the same time, rapid technological advancements demand a shift in STEM education, particularly in mechanical engineering, where traditional teaching methods struggle to keep pace with the evolving modern machine. This paper will address these issues in the context of Rigid Body Dynamics.
Rigid Body Dynamics (RBD) plays a foundational role in mechanical engineering, equipping students with the tools to analyze the motion of machines and design systems ranging from simple linkages to complex robotic and aerospace and subsea structures. However, traditional RBD curricula remain rooted in outdated pedagogy that overemphasizes 2D planar motion, relies heavily on rote memorization, and employs fragmented instructional strategies, with anachronistic mathematics. These shortcomings risk alienating students who seek meaningful connections between theory and the technologies shaping the modern world.
Previous papers by this author (to be discussed shortly) introduced the Moving Frame Method (MFM) as a modern framework for teaching RBD, and thirty follow-on papers deployed it in advanced research. This paper, however, subjectively reflects (the keyword: reflection) on the impact of this curricular revision—examining both perceived shortcomings of traditional methods and the advantages of the MFM. While a brief introduction to the method is provided, the primary focus of this paper concerns the pedagogical shift induced by the MFM.
This paper begins by outlining the current challenges in RBD education, identifying key obstacles that face students and the efforts educators have made to address them. Second, it discusses possible shortcomings of textbooks. Then it introduces the MFM and presents how it offers a holistic approach. By modernizing the content and pedagogy of RBD, the author suggests that MFM enhances student engagement and better prepares future engineers to navigate an increasingly complex and interconnected world.
Background
The traditional pedagogical content and delivery of Rigid Body Dynamics (RBD) continue to present challenges, particularly in addressing student misconceptions. Research has shown that misconceptions in dynamics are not merely due to gaps in knowledge but are often deeply rooted in flawed mental models, which this author argues stem from anachronistic mathematics. Chi's framework 1 categorizes these misconceptions into three levels: false beliefs, flawed mental models, and category mistakes—all of which the Moving Frame Method (MFM) addresses by embracing a 3D approach.
A related review by Liu and Fang
2
identified misconceptions about force and acceleration, attributing them not to flaws in content itself, but to preconceived misunderstandings, incomplete knowledge, misinterpretations, and the misuse of everyday language. These issues underscore the complexity of teaching dynamics and highlight why traditional methods often fall short. To address these challenges, educators have explored various strategies aimed at improving student learning:
Experimentation-based learning: this encourages students to observe and measure real-world motion to reinforce scientific concepts.
3
Visualization and simulation: Leverages digital tools like interactive animations and augmented reality to help students grasp abstract ideas.
4
Collaborative learning: Uses peer instruction and group discussions to refine conceptual understanding through social interaction.
5
Beyond discipline-specific strategies, general education theories have informed additional approaches to enhance dynamics learning:
Gradual introduction of concepts: Layering complexity progressively helps students build a solid foundation before tackling advanced topics.
6
Active learning strategies: Engaging methods like group work, peer discussions, and problem-based learning encourage students to take an active role in their education.
7
AI and simulation tools: Personalized AI-driven learning allows students to visualize complex systems and receive real-time feedback, particularly beneficial for abstract topics like vibrations.
8
Personalized instruction: Tailoring feedback and pacing enables students to overcome individual challenges and deepen their understanding.
9
Encouraging perseverance: Fostering a growth mindset helps students develop resilience and tackle difficult problems with confidence.
10
This paper proposes that the MFM addresses these concerns at a fundamental level. By elevating the content to 3D and incorporating recorded PPT and physics-based animations, students can immediately engage in experiential learning by observing machines in the world around them. In turn, this offsets preconceptions. Furthermore, the curricular content enables personalized instruction and simulation tools, facilitating deeper understanding.
Finally, the MFM represents a paradigm shift—one that redefines the core framework of RBD. As a result, many past efforts to enhance learning through curricular assessment and pedagogical refinements, while valuable in their time, may now be reconsidered in light of a method that inherently resolves longstanding challenges.
Part 1 of this paper examines the fundamental flaws in traditional RBD content, identifying where and why it fails to meet student needs.
Part I: The traditional method
Rising above 2D dynamics
Traditional rigid body dynamics (RBD) curricula have long placed a heavy emphasis on 2D planar motion, a practice rooted in historical contexts. Early machines—such as mills, lathes, four-bar linkages in steam engines, and windmills—primarily operated in two dimensions, making 2D dynamics a natural starting point for instruction. While this approach once provided an effective pedagogical framework to introduce concepts, it no longer meets the demands of modern engineering.
Today's engineers must analyze and design systems that operate in fully three-dimensional space, from robotic arms and drones to autonomous vehicles and aerospace structures. Yet, by confining students to 2D problems for such a long time, traditional instruction fails to develop the spatial reasoning and analytical skills required for these real-world challenges. When students eventually encounter 3D dynamics (let alone, bodies)—if it is even covered at all—they must grapple with an entirely new mathematical language and notation, effectively learning an additional subject from scratch.
A fundamental issue with the traditional 2D-first approach lies in its treatment of rotation. Typically, in vector algebra, a rotational coordinate is assigned to a vector perpendicular to the plane, implying that rotation occurs in a fixed third direction. However, this approach imposes a restriction: in introductory classes, this direction remains constant, with only the rotational coordinates changing. While mathematically valid at any given instant, this constraint can feel contrived and counterintuitive to students. From the author's experience, students often struggle to visualize this third dimension, and the insistence on a fixed rotational axis creates a disconnect between the mathematical abstraction and their intuitive understanding—leaving many feeling disoriented.
Modern students—who grow up immersed in 3D video games, hyper-realistic physics simulations, and interactive virtual environments—approach dynamics with optimism, anticipating that the subject can unlock profound insights into the intricate systems around them. Yet, the continued emphasis on 2D problems often fails to capture the richness of their experiences, making the subject appear archaic and detached from modern engineering challenges. As a result, many students disengage, unable to recognize the full relevance of traditional RBD instruction in an era dominated by three-dimensional motion.
The order of the frames
Standard dynamics textbooks typically introduce reference frames in the following order: inertial first, followed by non-inertial Normal-Tangent (NT), and finally polar. This sequence is presented as a logical progression from simple to complex concepts, as seen in texts by Beer and Johnston, Hibbeler, and Meriam.11–13 However, this author argues this ordering is flawed. Polar coordinates provide a more natural and intuitive entry point into non-inertial motion, as students are already familiar with rotating systems, such as carousels and orbits. Furthermore, polar coordinates maintain continuity with inertial frames since the origin remains fixed.
Introducing general NT frames forces students to confront fictitious forces in an abstract context, such as a frame on a freely moving particle, rather than through a more structured and familiar progression. This paper argues that polar frames should be introduced second, as they align better with students’ intuitive understanding. Polar coordinates describe real-world phenomena, such as planetary orbits and spinning objects, making them more accessible. Delaying their introduction creates an unnecessary divide between visualization and analysis.
Shifting the sequence also offers a clearer explanation for the four fictitious forces—Coriolis, angular, linear, and centripetal—since these forces are inherently tied to the rotating frame. This approach leads to a smoother transition to body frames, where these forces are most commonly encountered in engineering problems. It fosters a more intuitive understanding and practical application. Most importantly, this revised order of frames paves the way for the ultimate goal: the moving frame.
Hunting games
When restricted to planar motion, textbook problems often compensate for their lack of 3D engagement by infusing extraneous details into the problem statement. Instead of fostering critical thinking about physical principles, instead of reasoning through the underlying physics, before they can engage with the actual mechanics. As a result, problem-solving in many RBD courses devolves into a “hunting game,” where students sift through convoluted wording and scattered data, and ambiguous statements on initial conditions vs. known variables, rather than reasoning through the physics. Instead of focusing on underlying principles, students are compelled to spend cognitive effort distilling the question—only to rely on equation sheets.
For example, consider the problem in Figure 1, which requires the use of polar coordinates. Setting aside the absurd path and the dependence of r(θ) on θ rather than both on time, it provides only the forward velocity at the top, and only at that specific point, expecting students to deduce terms in the acceleration. The path raises the question: Who would fly a plane like this?
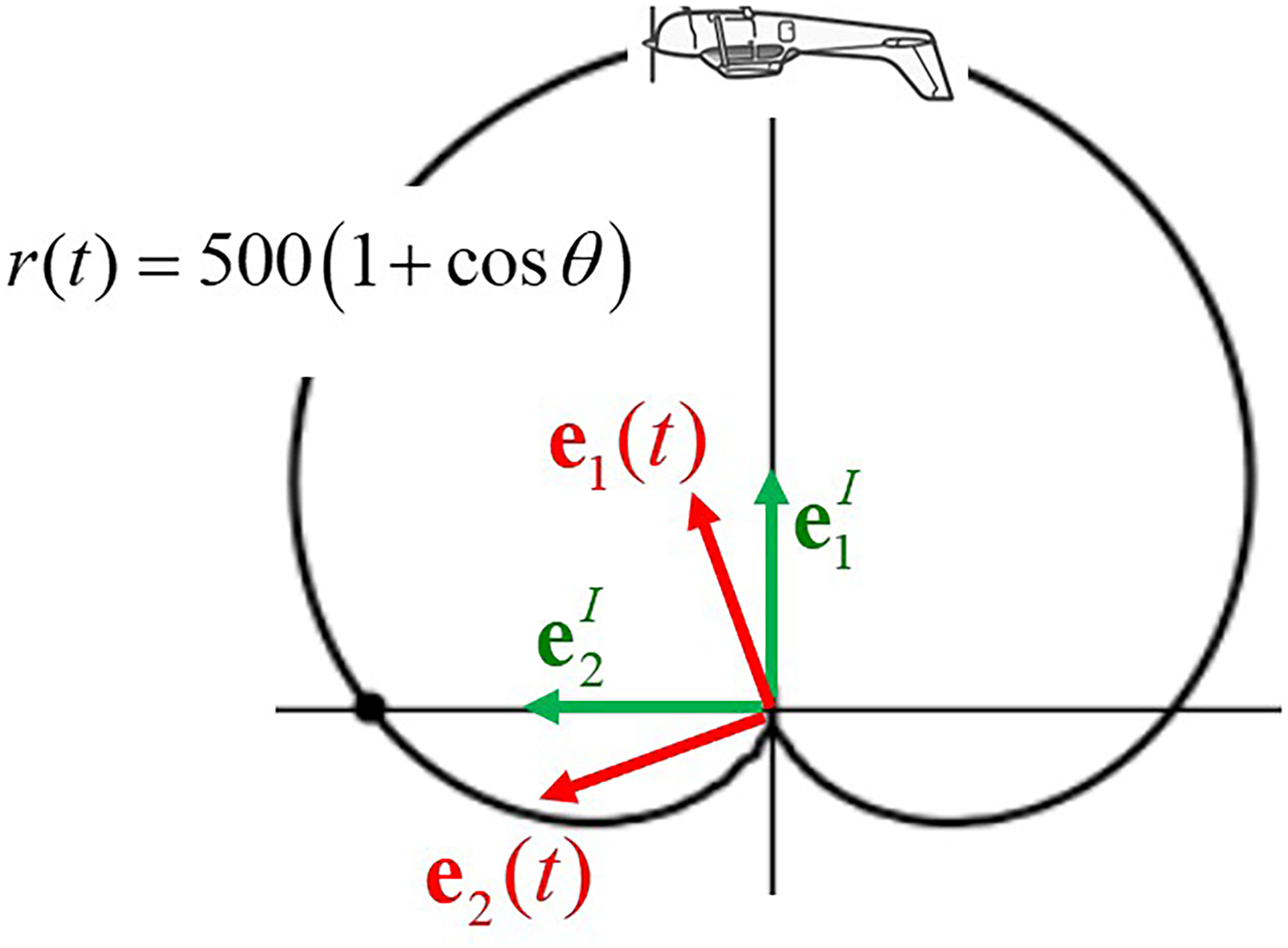
Who flies a plane like this?.
Another common example is the classic jungle-pendulum problem as evinced by Figure 2(a)–(c): “A pendulum swings in a dense jungle, and Tarzan grabs the vine to swing across a river. Calculate the tension in the vine when Tarzan is at the lowest point of his swing. Assume the vine is rigid.”
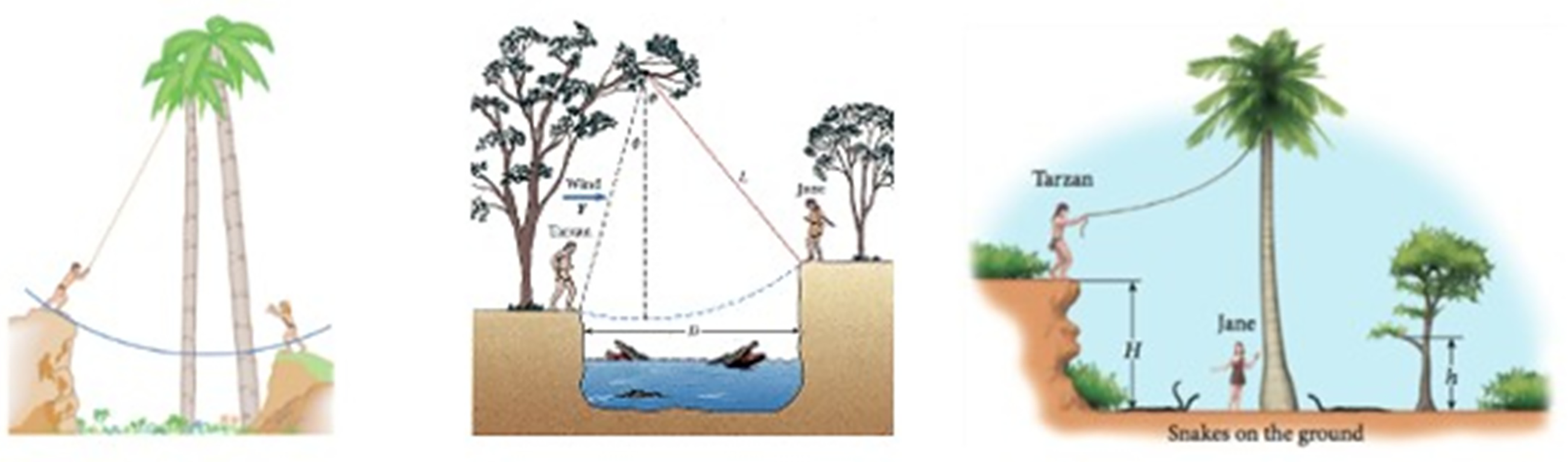
Is this really going to inspire today's students? Snakes?.
While this scenario attempts to engage students, the excessive narrative details—jungle, river, Tarzan, snakes, crocodiles and rigid vines—obscure the educational objective. These artificial embellishments do not contribute to the understanding of pendulum motion and instead serve as distractions for contemporary students, who are accustomed to gaming.
By structuring problems around irrelevant details and overly simplified information, the traditional approaches, which are confined to the sterility of 2D, fail to train students in the spatial and physical reasoning necessary for modern engineering challenges.
The cross product
The cross product is a specialized mathematical operation defined in three-dimensional (3D) Euclidean space, and more abstractly, in seven-dimensional (7D) spaces. While essential in its traditional geometric and algebraic applications, it has inherent limitations that restrict its broader use. As a result, its relevance is often confined to specific contexts, which can reduce student engagement and obscure the deeper physical principles. Moreover, its non-associative nature complicates both understanding and problem-solving, often resulting in errors. This lack of associativity, combined with reliance on tools like the right-hand rule may hinder students’ full understanding of the conceptual depth of the operation, and hinder the connection between the world of observable 3D machines and the underlying mathematics.
Even more intriguingly, the very operation itself can seem whimsical—more sine than cosine—in its behavior. Students often feel there is something mysterious and unanswered lurking behind its formalism, a hidden playfulness that leaves them with a sense of wonder and a lingering question: what deeper secret might it be hinting at?

Anecdotally, many students often forget the distinction between these two forms until they are explicitly guided to understand that the first column represents the definition, while the second is the implementation in the case of Euclidean space. In addition to these challenges, there are several other issues with the traditional cross product:
Non-Associativity: The cross product's non-associative property can lead to computational errors, requiring extra care in problem formulation and code implementation. Incompatibility with Modern Computational Tools: Today's computational platforms prioritize matrix-based methods, which are more suited for applications like 3D motion analysis and robotics, making the cross product less effective and intuitive in these contexts.
Beyond these challenges, there are several other limitations with the traditional cross product:
Non-Associativity: The cross product's non-associative property can lead to computational errors, requiring extra care in problem formulation and code implementation. Incompatibility with Modern Computational Tools: Today's computational platforms prioritize matrix-based methods, which are more suited for applications like 3D motion analysis and robotics, making the cross product less effective and intuitive in these contexts.
Take, for example, the classic textbook problem of a rotating rod with a collar sliding outward along it (Figure 3). The student is tasked with determining the kinematic variables, but two issues arise immediately. First, the problem's restriction to 2D simplifies the analysis too much, limiting deeper engagement. Second, the omission of the force driving the collar's motion leaves students questioning whether “magic” is at play. If we're to prescribe kinematics, we should at least acknowledge the forces behind the motion. To truly appreciate the complexity of motion, the problem should be expanded to 3D, where the full scope of the dynamics can be explored.
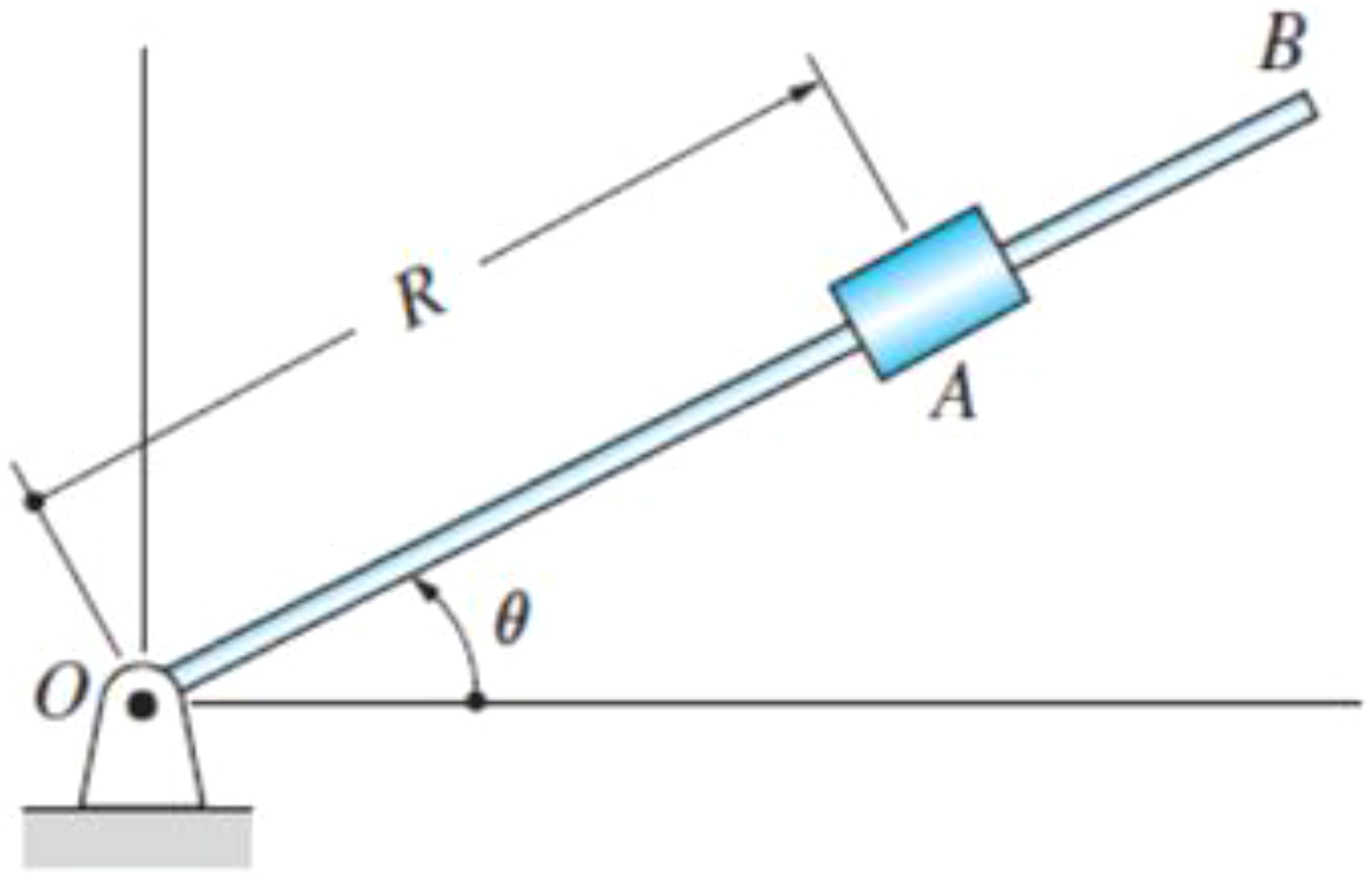
Collar A moving out on a rotating rod.
Thus, in contrast, exploring the cross product through the framework of Lie algebra provides a more generalized and insightful approach. This perspective allows for a deeper understanding of its role across various systems, free from the constraints of the traditional formulation.
At this instant
Consider this problem in Figure 4. culled from an existing textbook's problem set. The helicopter is rising, the body rotates about the vertical and the tail blade spins. All geometric information is provided. The problem task requires the student to find the velocity and acceleration, at this instant of alignment. Note the critical phrase “At this instant.”
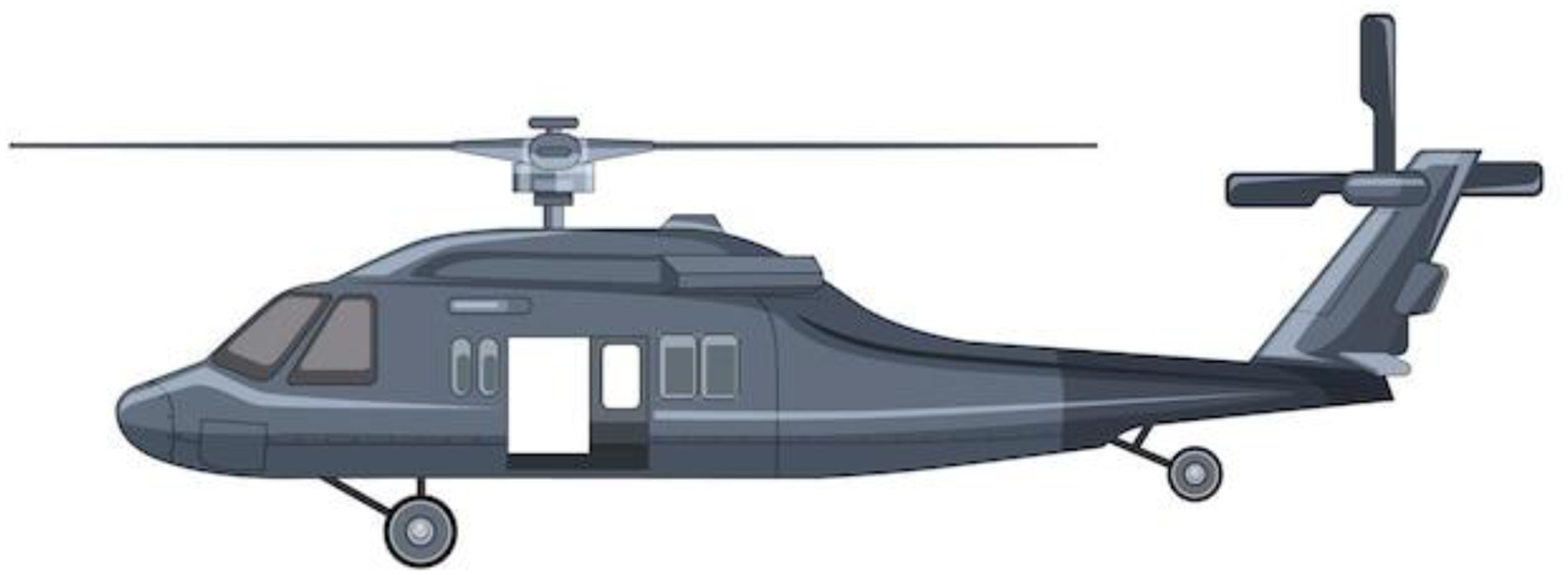
Traditional sample problem 3D kinematics.
The solution to this helicopter problem is addressed with the following equation.
This equation, describing the motion of particles in two frames, is flawed. It employs two frames in the same equation (with no meaningful conversion between the frames): a global frame and a local frame (with the local frame distinguished by subscripts). This frame alignment, at this instant, exploits an improper vector equation, causing students to speculate on its meaning (it being useful only at an instant of convenient alignment for the sake of a solution). Additionally, the first term is problematic due to the non-associativity of the cross product. Thus, students only study the problem “at a specific instant in time,” where the local frame and global frame are aligned.
Particles vs. Bodies
RBD is traditionally taught by first covering particle dynamics before introducing rigid bodies. This approach oversimplifies motion early on by ignoring the inherent interplay between translation and rotation in real-world systems—the most critical aspect of RBD. By reducing motion to particle-based analyses, students develop a fragmented understanding that disrupts their intuition when rigid body motion is finally introduced. Instead of building upon a unified framework, they are forced to rewire their thinking mid-course. While particle dynamics has its place—such as in celestial mechanics—its dominance in the machine engineering curriculum distorts the natural structure of motion.
Work and energy blur the line
In many undergraduate dynamics textbooks, work-energy methods receive a great deal of prominence. While unquestionably valuable, their early introduction and emphasis (both) blurs a crucial distinction: deriving equations of motion versus solving them. This distinction is not merely academic—it is the foundation of a student's ability to think rigorously about dynamics. When work-energy methods are emphasized too soon, students may sidestep the fundamental process of deriving equations of motion, reducing dynamics to a set of competing solution techniques rather than a deep study of motion itself.
The primary goal of an introductory dynamics course must be clear: it should train students to derive equations of motion systematically. This is not just a preliminary skill; it is the backbone of the subject. Premature reliance on work-energy methods can encourage students to treat dynamics as a collection of problem-solving shortcuts rather than a structured framework for understanding motion. As a result, when faced with more complex mechanical systems—especially in rigid body dynamics or three-dimensional motion—students may struggle, having never fully internalized how equations of motion emerge from fundamental principles.
Coding
To successfully integrate AI into smart machines, we must rethink how we approach coding. Modern AI systems depend on efficient data manipulation, matrix operations, and real-time adaptability. This demands a framework that lends itself to coding and is flexible enough to accommodate complex AI algorithms.
However, traditional rigid body dynamics (RBD) methods—rooted in vectors and cross products—conflict with these priorities. Their mathematical formulations introduce computational inefficiencies that are resistant to clean coding, often requiring symbolic manipulation or specialized libraries that do not scale well in AI-driven applications.
Based on the author's experience before teaching this method, students struggle to bridge theoretical dynamics with practical coding because traditional methods do not naturally translate into algorithmic thinking.
If rigid body dynamics is to remain relevant in an AI-driven engineering landscape, its mathematical framework must evolve. A shift toward mathematical representations that are inherently computational—favoring matrix-based approaches over vector operations—will better prepare students and engineers to harness AI's full potential in designing smart machines.
Solution categories and consistent solution approach
Due to space limitations, traditional textbooks often fail to meaningfully differentiate between solution methods, especially in the context of the Euler and Newton equations for bodies. For example, solution archetypes for these equations are typically presented (and whimsically implemented) as:
Given the forces, find the motion (calculus) Given the motion, find the forces (algebra) Solve impact problems (discretize the equations)
These three methods—kinematic-to-kinetic (algebraic), forces-and-moments-to-kinematics (calculus), and discretized laws for impact—are often treated as separate, independent approaches. However, in reality, they are simply different applications of the same laws of motion, designed for problems that are more suited for homework than real-world scenarios. When textbooks present them as discrete methods, it can confuse students and obscure the underlying unity of the discipline. They should be viewed as complementary approaches, each suitable for different types of problems but all grounded in the same physical principles.
Additionally, many solution manuals arbitrarily shift to the inertial frame to simplify the solution process—an idealized frame that doesn't represent a physically realizable situation. This practice can mislead students by teaching them to rely on a theoretical construct without fully understanding its limitations or the context in which it applies.
The problem of the textbook
Students often avoid reading textbooks because they are dense and difficult to follow. Editors press as much information as possible onto a single page, making the material overwhelming. These textbooks often skip important steps and fail to show how terms evolve during derivations. They also rarely take the time to discuss underlying concepts or patterns. Most frustrating of all, these textbooks overwhelm readers with callouts, blurbs, and advanced notes, leaving the path forward unclear.
The poor layout, dense information, and lack of flow overwhelm students, hindering their ability to process material effectively. Mayer 14 highlights that textbooks should be well-structured and reduce cognitive load, allowing students to focus on understanding concepts rather than deciphering complex and fragmented content. This fragmentation turns textbooks into obstacles, rather than tools for understanding. Students have lost patience, and while we could condemn them for this, we might also show compassion—something the MFM method does well.
Another challenge students face when learning engineering from textbooks is how the material distills centuries of trial and error into overly concise explanations. By simply turning a page, students pass through over 200 years of development without recognizing the historical journey behind the concepts. This lack of context robs students of the opportunity to understand the immense effort that led to the knowledge they are now learning. Research on the evolution of engineering education by Cardoso & Chanin 15 partially supports this view. The history of engineering education, spanning antiquity, medieval, modern, and contemporary periods, highlights how engineering knowledge has developed through trial and error over time. Understanding this historical evolution provides students with critical context, showing that what they are learning today is the result of centuries of iterative progress. Without this context, students often misinterpret their struggles as signs of personal inadequacy, failing to see that their educational journey is a continuation of a much broader historical process. In the process, they lose sight of the human journey of problem-solving that shaped the field.
Part 2: The moving frame method
Brief discussion on the method
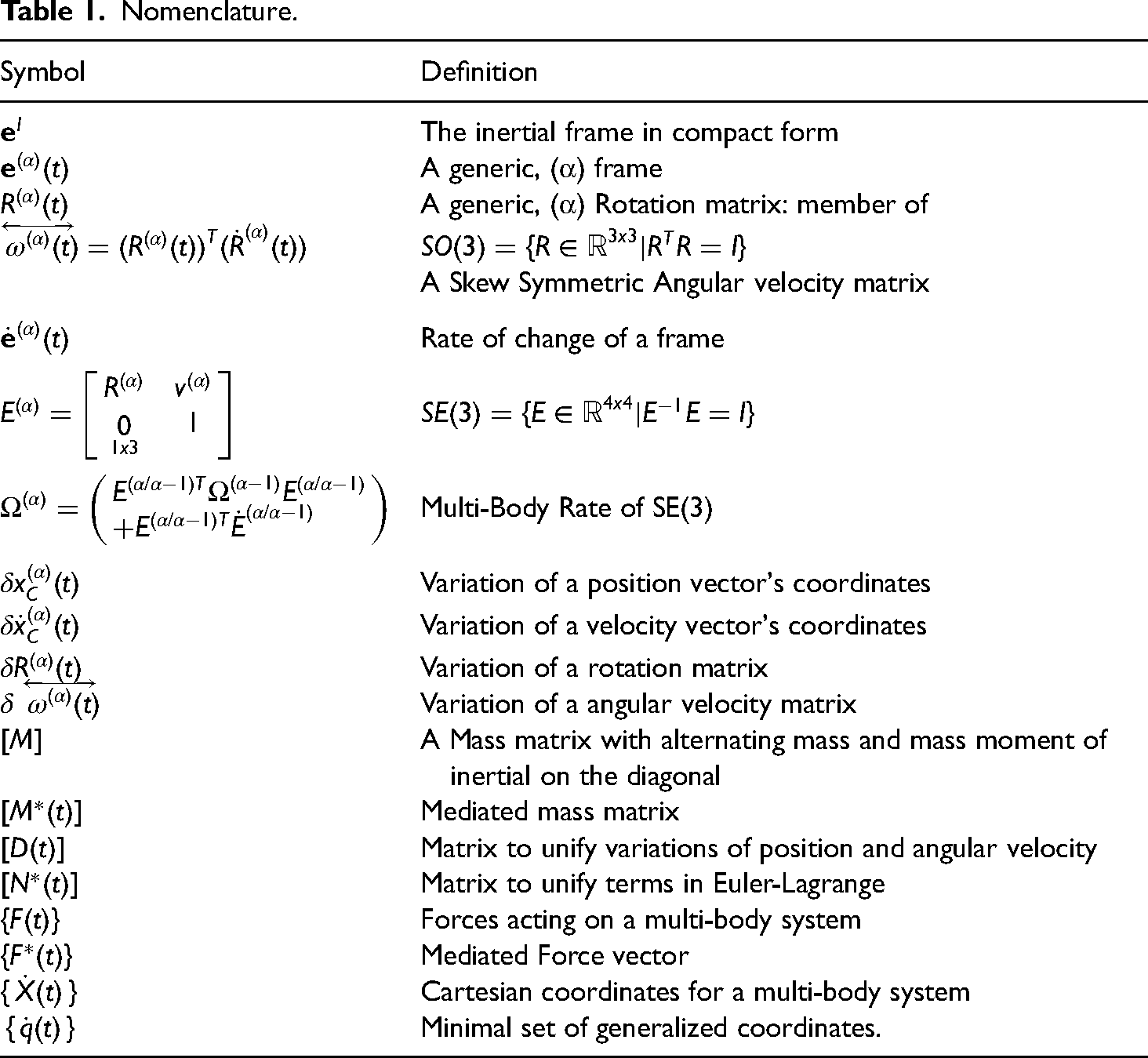
The math that undergirds the MFM has been established by physicists for nearly a century. However, the MFM integrates this modern math fluidly into the curriculum. The introductory class and method have been described, Impelluso. 16 A short review is provided in this first sub-section and Table 1 presents the basic nomenclature.
Élie Cartan, 17 through his work in differential geometry, proposed placing a frame on everything that may move. In the MFM (Moving Frame Paradigm), frames are assigned to all moving bodies.
The MFM then connects these frames using aspects of Lie group theory, simplified and distilled into matrix multiplication and Ted Frankel's compact notation. 18 The structures within Lie group theory provide the mathematical foundation for such an analysis. In the MFM, these concepts are made more approachable by simplifying them to matrix operations. It also enables them to solve final exam problems such as the following in Figure 5(a) and (b).
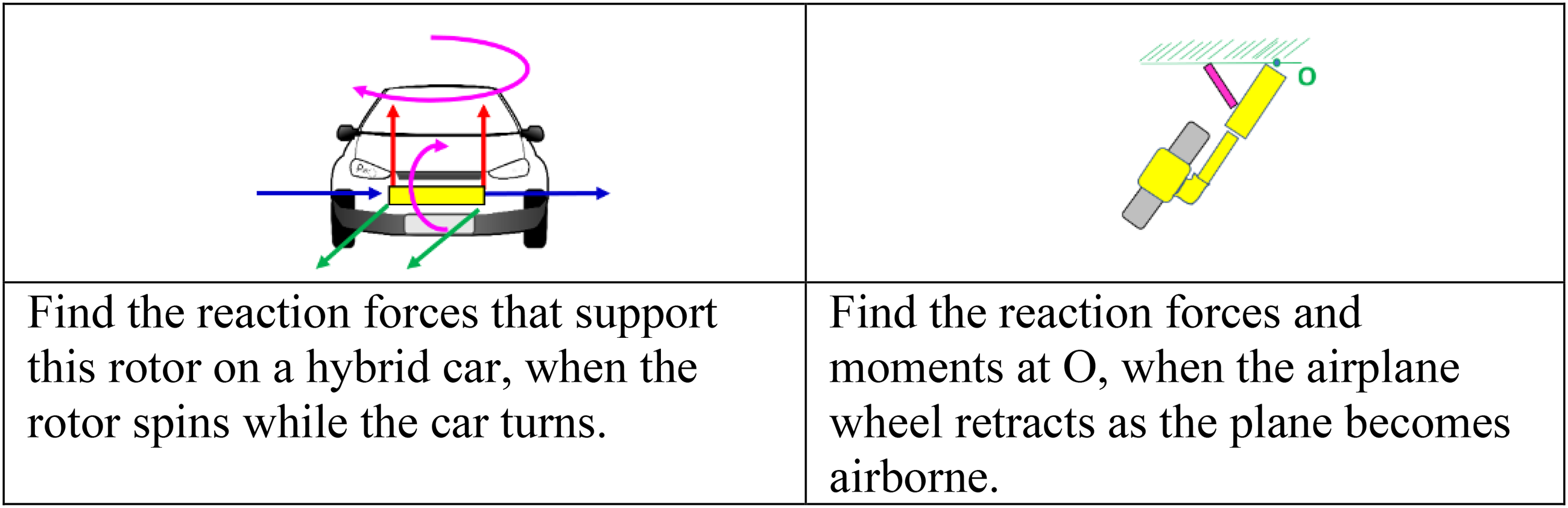
(a, b) Sample problems using MFM for second year students.
The only challenge for students is the density of the notation. However, experience has shown that students quickly adapt, aided by the ‘Swipe Learning’ documents (to be discussed shortly) and forthcoming text files. By organizing concepts into a logical framework and leveraging modern computational tools and this new pedagogy, the MFM reduces cognitive overhead while fostering deeper understanding. First, let us take a brief review.
The MFM leverages matrices to provide the new moving frame in terms of the inertial frame, using rotation matrices. Below, the inertial frame rotates into a second one through a rotation matrix. The development of these matrices leverages trigonometry once and only once and from that point, matrix math takes over:
In the method, the primary equation, in accordance with the philosophy of Cartan, is the rate of change of the frame in terms of the same frame. The rotation matrices conspire to produce the angular velocity matrix below.
These relationships are recursive for coding
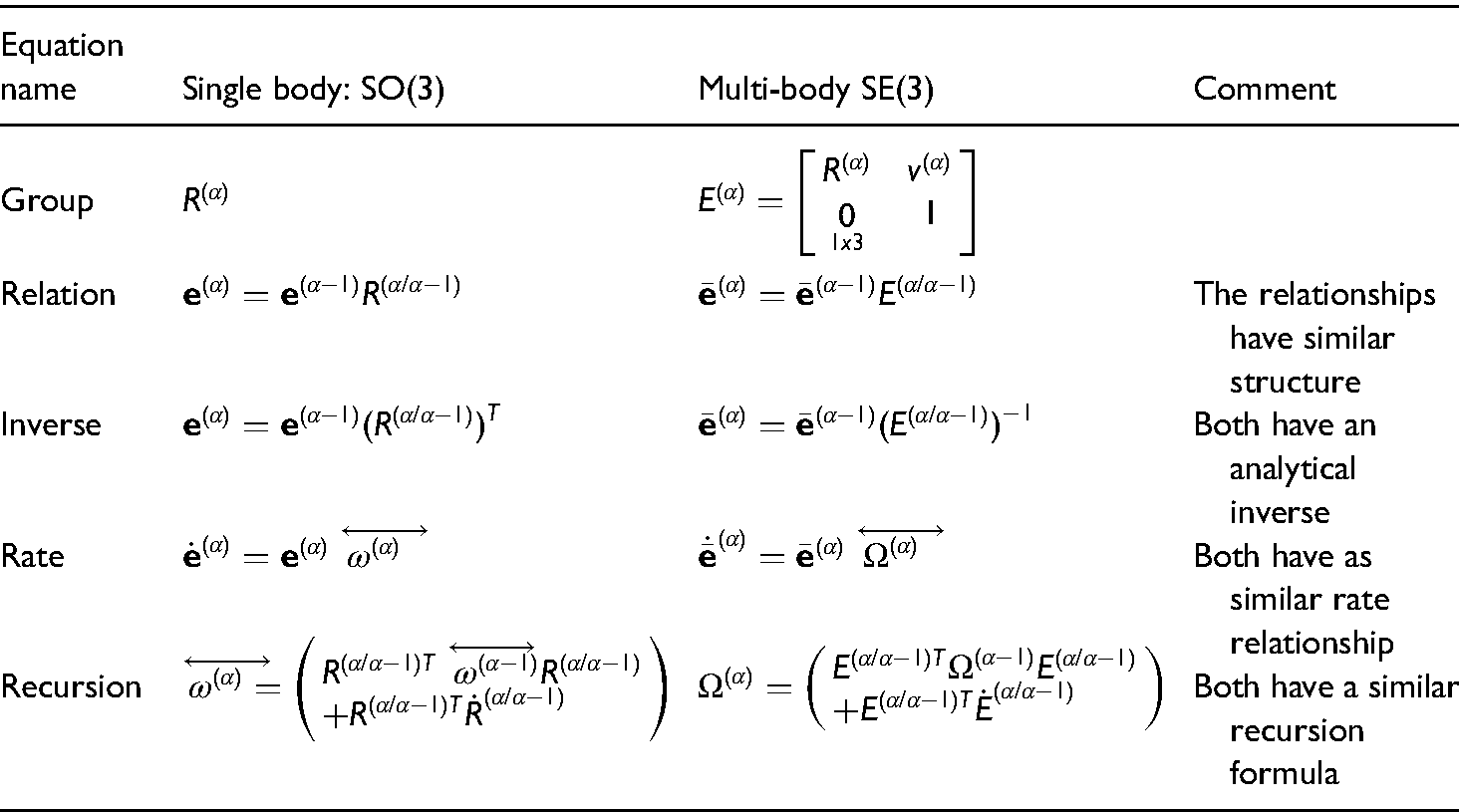
Table 2 demonstrates the patterns that underscore the MFP. In the two columns:
The rate relationships (the second row) are the first beating heart of the method: the rate of change of the frame in terms of the same frame. The recursive formulas (the last row) are second heartbeat of the MFM, showcasing the recursive patterns for single and multi-body dynamics.
Nomenclature.
Comparison of introductory (single-bodies) and advanced (multi-bodies) MFM.
Consider for a moment the possibility that undergraduates, when presented with a more compassionate and patient approach—one that leverages clear mathematics echoing their introductory calculus—could effectively master the calculus of variations. When Hamilton's Principle is framed in this light, it transforms into a highly accessible tool. In this context, the Gâteaux derivative (as used in the MFM) provides an intuitive entry point, especially when the variation, ε, is treated as an additional parameter. This method naturally echoes the derivative concepts introduced in multivariable calculus. With careful instruction and clarity, students can see how this approach seamlessly leads to the Euler-Lagrange equations, which are fundamental for solving variational problems.
The variations of the translational velocity are equal to the rate of the variation of the displacement. This is merely the commutativity of mixed partials (Schwartz Commutation).
The third heartbeat of the method, however, is the constraint on the variation of the angular velocity. This was achieved by Holmes.
19

This restriction obviates the need for Virtual Power as advocated by Wittenburg, 20 and is fully worked out in the pedagogical content.
While these equations may appear complex, they reveal patterns that inspire students to conduct advanced research. The present a view of dynamics that overcomes the limits of the big three textbooks and keeps the method simpler and more accessible than Kane 21
After performing the calculus of variations, the MFP arrives at one equation for all open link systems, regardless of multiple branches. In the following, the superscripted star variables are mediated by the matrix relating Cartesian and Generalized Coordinates. These equations below describe all open loop multi-body dynamic links




Figure 6 presents some sample problems solved by undergraduate students. It is pointed out that Equations 8–11 are used to solve all these problems, the only distinction being the B matrix that relates generalized to Cartesian Coordinates
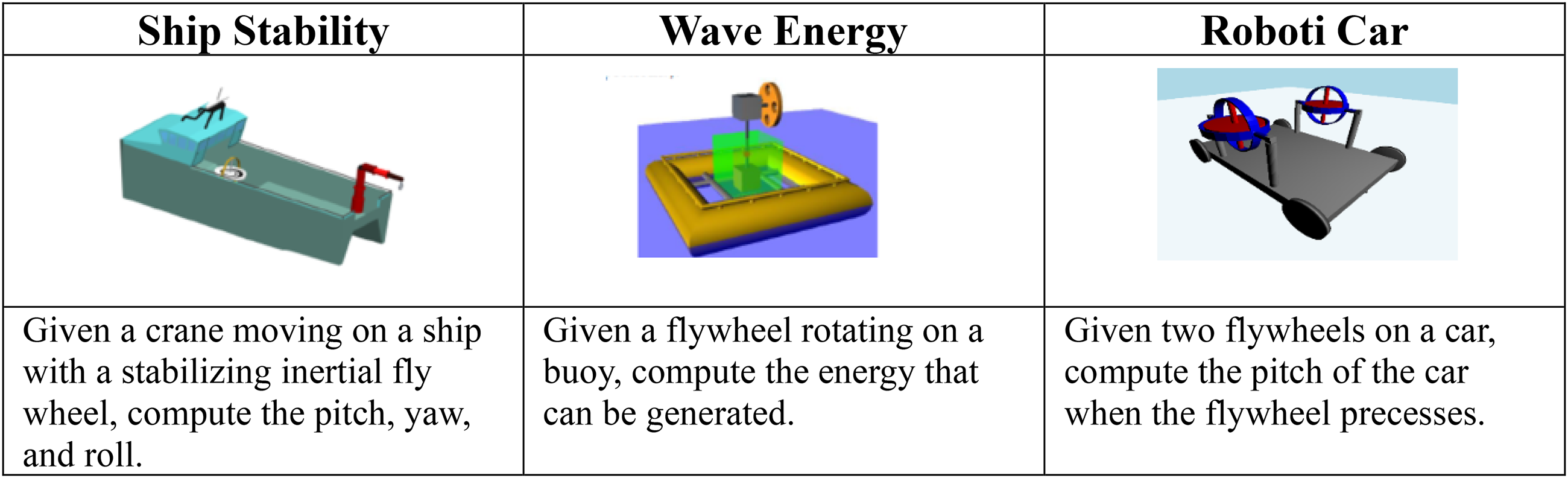
(a, b, c) Sample problems using MFM for third year students.
We will now revisit the previously stated issues with the traditional RBD, and discuss how the MFM eases them.
Rising above 2D dynamics
The MFM incorporates 3D motion analysis from the outset. It separates translations from rotations, using vector algebra for translations and matrix algebra for rotations. One significant feature of the MFM is its consistent use of notations. By using the same notation for both 2D and 3D problems, the method reduces confusion arising from switching between dimensions. This consistency aids students in understanding the relationships between concepts and applying their knowledge across various scenarios.
One valid critique of the MFM is that most mechanisms in machines today are, indeed, 2D (e.g., crank-sliders, gears, pistons, cam-follower systems, and belt drives). However, the purpose of the MFM is not simply to teach mechanisms, but to engage students, and today's students are drawn to 3D. That said, as mentioned, the same notation applies to 2D systems, allowing for the exploration of simpler mechanisms as well.
The order of the frames
The Moving Frame Paradigm (MFM) offers a more intuitive progression for understanding how to model kinematics. Traditional textbooks introduce the non-inertial Normal-Tangent (NT) frame before the polar frame, which can disrupt students’ understanding. The MFM challenges this sequence, as outlined in Table 3. This approach highlights the trial-and-error process of early engineers and emphasizes the pursuit of more efficient methods for describing motion. Introducing frames in this manner allows students to appreciate the challenges that have shaped our current understanding of reference frames.
A proper flow of frames.
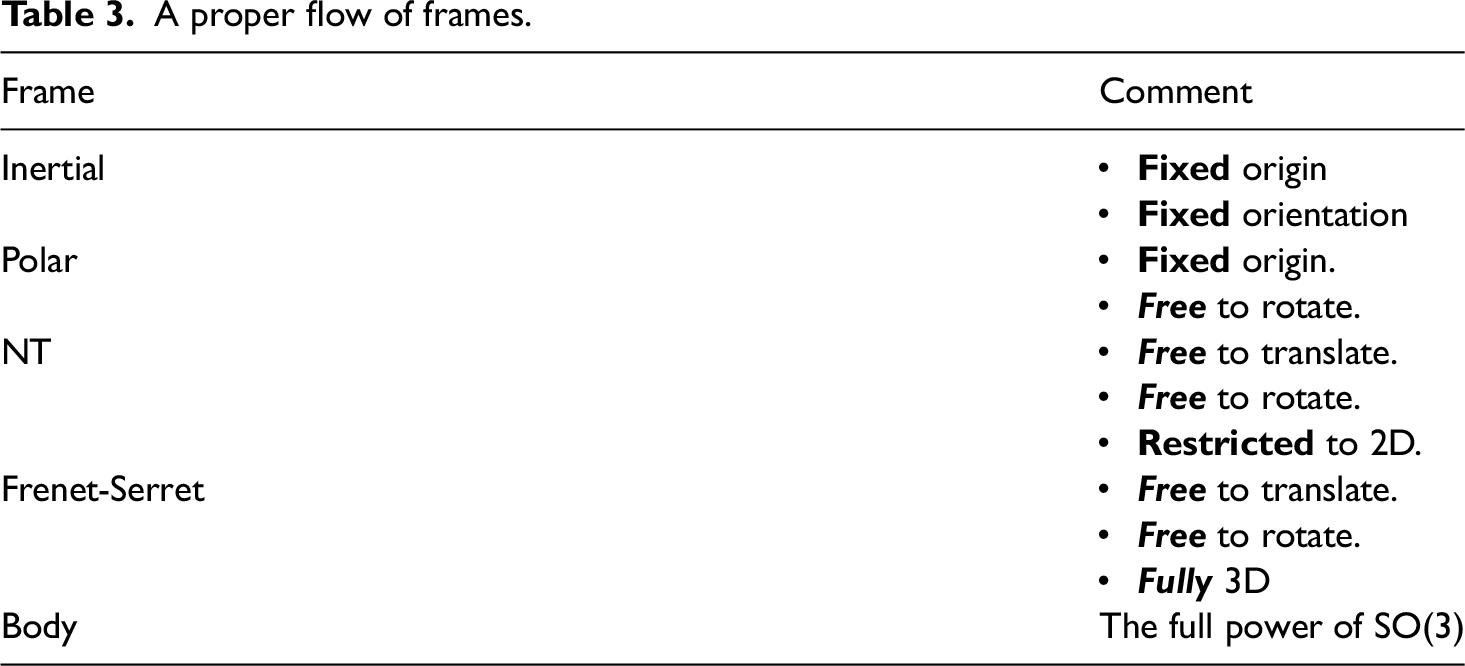
Moreover, the MFM clarifies the often-confusing Normal-Tangent frame. Instead of treating it abstractly, the MFM connects frame rotation to changes in angular progression along a path, making the NT frame's role more concrete and accessible. This approach eliminates the need for rote memorization and fosters a deeper, conceptual understanding of non-inertial frames.
The next step—introducing the Frenet-Serret frame as a 3D extension—becomes a natural, seamless continuation of this progression. When it is introduced, the concept of moving frames unfolds as a natural extension of the earlier steps, enhancing the flow and understanding of the material.
Hunting games
Traditional dynamics textbooks often resemble a scavenger hunt for the mind. A typical sentence might begin, “Consider this: if this and that … and then, if that, what is this or that, assuming these parameters hold?” By the time the reader has deciphered the question, they may likely feel mentally exhausted. It almost seems as though authors are vying for the title of “Most Complex Sentence,” while students are left struggling to understand the core message.
While it could be argued that the purpose of education is to challenge students with complex language and abstract scenarios, today's students are not seeking riddles. They expect clarity, focus, and a direct path to understanding. The undergraduate classroom is not the place for students to navigate a maze of convoluted phrasing. It should foster critical thinking without requiring students to untangle complex language first.
In contrast, the Moving Frame Paradigm (MFP) presents fully 3D problems in a clear and focused manner, such that the solution path becomes apparent without confusion. The structure of MFP guides students naturally toward the correct approach, enhancing their understanding and confidence. With MFP, there's no need for obfuscated diagrams or convoluted explanations—only straightforward, intuitive problem-solving.
The cross product
The MFM delivers the following form for the acceleration of a particle.
In contrast to the previous approach of Equation 2, this latter formulation clearly identifies a single frame. The four terms, exploit the skew-symmetric forms, and this ensures that matrix multiplication remains associative.
Finally, the helicopter problem is presented in the second year, introductory class in dynamics, using the traditional approach. The position, velocity, and acceleration of the point P is found, not at an instant, but for all time. This will be discussed after one short digression.
The MFP advocates using the twist and the skew-symmetric matrix to address several pedagogical and computational challenges. The descriptive equation is
This equation leverages an expression for the associated algebra of Lie Group theory (the skew symmetric form of the first vector as a matrix, multiplying the column of the second).
The justification for the operation is provided in the course notes, but is called out here: https://movingframe.org/PDF/Replacing%20the%20Cross%20Product.pdf
The skew-symmetric matrix simplifies teaching and computation by aligning with linear algebra principles, ensuring both consistency and adaptability. Unlike the cross product, which is limited to three dimensions, the skew-symmetric matrix representation extends naturally to higher dimensions and non-Euclidean contexts, facilitating more straightforward computations. Its associative property streamlines implementation and reduces errors in dynamic simulations.
The Moving Frame Method (MFM) reformulates rotational dynamics by utilizing rotation matrices derived from Lie algebra, offering a more systematic approach to describing rotations and angular velocity. This matrix-based approach minimizes errors, aligns with modern computational tools in robotics and AI, and unifies the treatment of rotational and translational motion. By applying consistent operations across these domains, the MFM simplifies the derivation of equations of motion and enhances clarity.
Under the aegis of this understanding, one could say:
The torque is a measure of the misalignment between a particle's position, and the force acting on it. The angular momentum is a measure of the misalignment between the particle's position and its linear momentum. The cross product is a manifestation of twist. Then Euler's law states that the misalignment between force and position makes the misalignment between linear momentum and position, change with time.
At this instant
Most traditional engineering textbooks present problems in terms of calculating the position, velocity, and acceleration of a system at a specific instant, rather than solving for all time. This approach often stems from a poorly constructed vector equation (Equation 2), which attempts to align frames in a way that doesn't fully capture their time-dependent relationships. Consider the helicopter problem discussed earlier. In a traditional class, the objective is to determine the position, velocity, and acceleration of the helicopter's tail blade at a particular instant.
However, in the Moving Frame Paradigm (MFP), the entire trajectory of the tail blade is open for analysis through simple, easily codable, matrix multiplications. The MFP allows for plotting the motion, velocity, and acceleration of the tail blade over time. In essence, it's like moving from a still-frame photo to an entire movie of the system's behavior. The result is not only clearer but also more intuitive, enabling students to grasp the dynamic motion over time instead of being confined to isolated snapshots.
As a result of a more well-formed question with the MFM, students can use MATLAB to plot the path of the tail blade, along with the velocity and acceleration vectors, revealing a deeper understanding of the values and directions of velocity and acceleration.
Figure 7(a) plots the path of the point, while the red lines indicate the tangent velocity. Figure 7(b) plots the path of the point, while the green lines indicate accleration, in this case, purely centripetal.
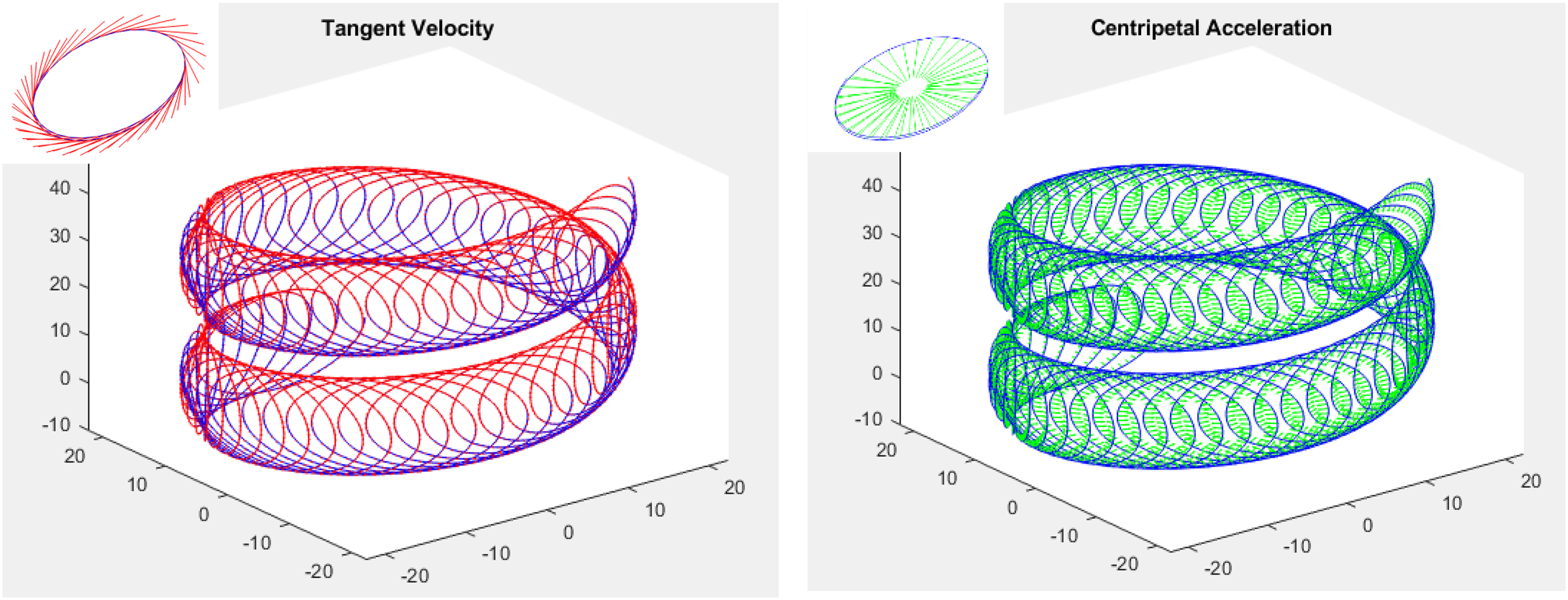
(a, b) Path and velocity/acceleration vectors of the tail blade point, P.
Particles vs. Bodies
Starting with rigid bodies rather than particles in dynamics courses provides a more comprehensive understanding of motion. Particles are limited to translational motion, ignoring rotation, which is a key aspect of real-world systems. By introducing rigid bodies first, students immediately encounter both translational and rotational motion, giving them a fuller understanding of dynamics.
The Moving Frame Paradigm (MFM) facilitates this approach by simplifying the derivation of Euler's equations and adapting Newton's laws for rigid bodies in an intuitive way. The MFM helps students directly engage with the complexities of rotation from the outset, making the introduction of rigid bodies more accessible. Without rotation, Euler's laws become unnecessary, and the equations simplify to F = ma. By starting with rigid bodies, students can see the need for equations that account for rotation, leading to a deeper grasp of the subject.
This approach connects translation, rotation, and fundamental principles in a cohesive way, providing students with a stronger foundation to tackle more complex topics. It also enhances their ability to think critically about dynamic systems, ultimately streamlining their learning experience.
Work and energy
Power, work, and energy are fundamental in dynamics, but their traditional presentation fosters misconceptions: they are primarily used as alternate problem solving tools. Instead of treating them as primary problem-solving tools, they should be framed as part of a broader approach to deriving equations of motion, with energy principles reserved for advanced mechanics. The current emphasis on work-energy methods distorts students’ understanding and weakens their ability to analyze complex systems.
Historically, work-energy methods gained prominence as a shortcut for avoiding explicit force analysis. While useful in some cases, this approach overemphasizes energy as an alternative rather than a complement to Newtonian mechanics. Traditional textbooks reinforce this by defining power as the time derivative of kinetic energy—a valid concept for particles but misleading for rigid bodies, where energy is distributed between translational and rotational motion. Students internalize this oversimplification, leading to errors in understanding mechanical energy flow.
Another issue is presenting work and kinetic energy as alternative methods for deriving equations of motion, rather than as natural consequences of these equations. This blurs the distinction between deriving equations and solving them, leading to confusion when students later encounter more advanced mechanics. Work-energy methods should be introduced not as standalone tools but as extensions of Newtonian principles.
Advocates claim these methods build intuition for energy conservation, but in practice, they encourage reliance on memorized formulas over deeper understanding. Instead of serving as a stepping stone to Hamilton's Principle, undergraduate courses treat them as a means to sidestep Newton's laws, limiting conceptual clarity.
Another concern is the role of power in real machines: what provides it? Traditional courses fail to connect theoretical mechanics with practical engineering, leaving students with a mechanistic but shallow grasp of energy transfer, dissipation, and control.
To build a stronger foundation, dynamics courses should prioritize obtaining equations of motion—through Newtonian mechanics at the introductory level and variational principles in advanced classes. Solution techniques, including energy-based methods, should be introduced only after students grasp the fundamental laws of motion. This approach fosters a clearer and more rigorous understanding of dynamics.
Coding and matrices
The MFM emphasizes matrix-based methods that are inherently more suitable for modern computational approaches. In an era where machine learning, AI, and robotics rely on matrix operations, the MFM provides a pedagogically sound foundation for students to learn how to apply these methods in practical, real-world contexts. The matrix-based approach also makes it easier for students to transition from theoretical learning to actual problem-solving with programming languages like MATLAB or Python. The MFM's emphasis on computational tools aligns perfectly with the needs of modern engineering students, who will benefit from the ability to solve complex 3D problems with minimal computational overhead.
Solution categories and consistent solution approach
Let us discuss the Coriolis Effect as illustrated by this 3D animation: https://movingframe.org/Viz/Chapter%201/Figure%20SP.1.8/index.html
This problem in Figure 8 can be solved in a single page by analyzing it from the inertial frame: firing the projectile outward and then rotating the resulting path. However, such approaches—whimsically choosing frames—undermine learning and often lead faculty to rely on solution manuals. The proper way to solve this problem is from the rotating frame by directly addressing the non-linear equation of motion. That said, the final step of solving this equation does not belong in a dynamics class. Elevating a coupled second-order system to a fourth-order equation for decoupling and solving is more appropriate for a vibrations course
Typical undergraduate task.
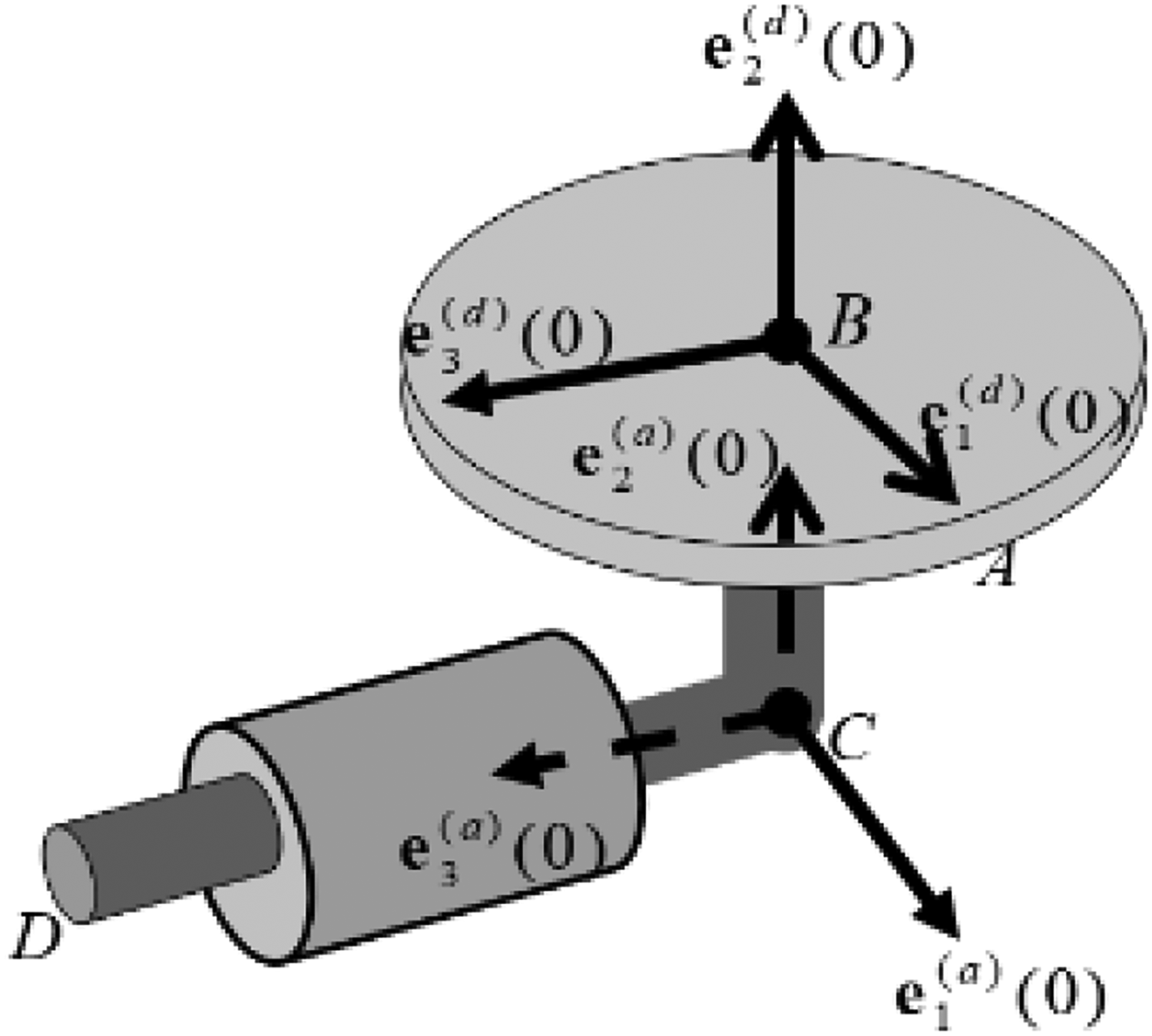
Regarding more advanced problems (yet, still in the introductory class), second year students solve this problem. Find the position, velocity, and acceleration of point A, if both the axle DC and the disk are rotating. Also, find the reaction forces at D.
The solution, obtained and coded by undergraduates is found here: https://movingframe.org/Viz/Chapter%204/Figure%20SP.4.11/index.html
Students are provided with a consistent roadmap to solve all such problems. All the sample problems follow this roadmap.
State Momentum Definition and Motion Laws. Construct frames (I will give you the frames). State rotation and angular velocity matrix (skew form): frame 1. State rotation and angular velocity matrix (skew form): frame 2 (table). Mass moment of inertia matrix (use figures above and re-orient). Prepare Distances (from CM to O; and from O to CM). Formulate force for Newton and moments for Euler State Euler equation in matrix form and/or coordinate form. Restate position (step 6); formulate accelerations; restate forces (step 7). State Newton equation in matrix form and/or coordinate form. Consolidate and answer any remaining question.
Consider these equations for single body motion: Newton and Euler. Traditional textbooks present and use them for sample problems, but never disambiguate potential solutions paths. Algebraic Solutions: One could provide the kinematic information on the left, and ask the student to compute moments and forces. Differential Equation solutions: One could provide the moments and forces and ask students to find the kinematic variables. Impact Solutions: One could reverse the differential equation and obtain solutions just before and just after an impact in a small-time window, during which one can assume the moment and forces are constant. These are approximate solutions.
If one assumes no external forces, one arrives at two of the three conservation laws: linear and angular momentum. Mix and match: The notes eschew mixing solution methods (as is common in a traditional class). However, this is generally, in the opinion of this writer, unnecessary, toxic and it undermines pattern-based learning.

Lifelong learning: the arts in STEAM by motion
The MFM introduces a more complex and realistic model of motion, reflecting the multifaceted nature of real-world dynamics. In fact, due to the education of the author I the arts, the arts have been infused into all these notes.
This shift makes the material more engaging and also challenges learners to expand their understanding, encouraging them to continuously adapt their thinking. This shift in how we engage with complex concepts, such as RBD in 3D, offers a parallel to how we think about history and the arts.
As we learn to adapt our thinking and embrace a more interconnected view of the world, we begin to see how disciplines like mathematics, art, and philosophy are intertwined. The Renaissance period, for example, was a time when artists and scientists like Leonardo da Vinci seamlessly blended creativity with scientific inquiry, illustrating that the pursuit of knowledge is not confined to any one domain.
Hokusai's Great Wave and Proust's bee (Remembrance of Things Past) and ship moment collapse scales, revealing perception as an interpretive process. The wave dwarfs Fuji, and the bee moves like the distant ship—both illusions of perspective. Peirce's semiotics explains this as a relational meaning shift, not an absolute truth. These insights are leveraged to inspire the calculus of variations, distinguishing the regular derivative from the Gâteaux derivative: small variations in function spaces depend on perspective, much like how perception shifts based on an observer's frame. Peirce's pragmatism unites them all—what we see is never the thing itself, but a shifting web of meaning, shaped by time, motion, and the act of observation.
Leonardo da Vinci's Vitruvian Man (Figure 9) highlights the relationship between geometry and the nature of rotations, centered on the irrationality of π. The impossibility of squaring the circle—transforming a circle into a square with the same area—symbolizes a deeper truth. Yet, when we extend our arms and compare the span between our fingertips to our height, we find ourselves inscribed within a square. If we raise our arms to touch a horizontal line at the top of our head and extend our legs to match that angle, we are inscribed within a circle. Da Vinci seems to suggest that while humans cannot square the circle, God accomplished it in our creation. During the Renaissance, the number π began to emerge more prominently, as the study of rotation became essential to understanding machine motion.
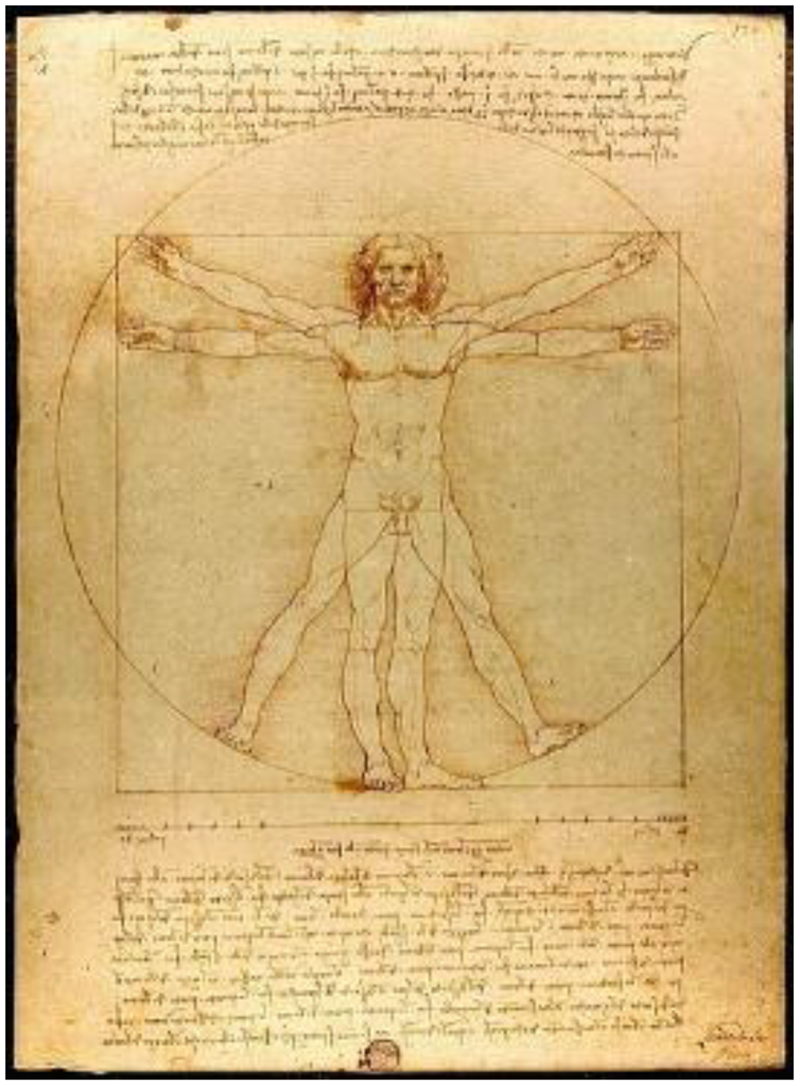
Da Vinci, Leonardo. Vitruvian Man. 1490. Pen and ink on paper. Galleria dell'Accademia, Venice, Italy.
The Moving Frame Method (MFM) builds on this understanding, integrating art and philosophy into its framework. For example, consider how the product and chain rules can be explained through this lens, blending mathematical precision with artistic insight.
The Moving Frame Method (MFM) builds on this understanding, integrating art and philosophy into its framework. For example, consider how the product and chain rules can be explained through this lens, blending mathematical precision with artistic insight.
Consider this discussion on variational methods that references the Ducento artist, Giotto: https://movingframe.org/AdvancedDynamics/Module-5/images/History.pdf Consider: https://movingframe.org/PDF/CP.pdf
The textbook
The MFM builds on the idea of creating a more interactive and accessible learning experience. An original 500-page textbook draft was transformed into over 11,000 digital pages, each focusing on bite-sized concepts and incorporating features like step-by-step explanations and color-highlighted equations. Repeated exposure to key figures across various contexts reinforces understanding, while animations guide students through the evolution of equations and concepts. By integrating text, sample problems, and WebGL tools into a cohesive digital experience, the MFP replaces outdated, fragmented methods with an accessible and engaging framework. This new paradigm not only simplifies the learning process but also empowers students to focus on mastering engineering principles with clarity and confidence. Students “swipe” through the more relaxed content.
To bring the Moving Frame Paradigm (MFM) to life, the author developed 50 interactive 3D animations using WebGL and Three.js. These animations are designed to run seamlessly on smartphones, making them accessible to students anytime and anywhere. WebGL provides the foundation for rendering high-performance 3D graphics directly in web browsers without requiring additional plugins, while Three.js simplifies the creation of complex scenes and animations.
The animations demonstrate core concepts of the MFP, such as rotational dynamics and frame transformations, by visualizing equations and their physical implications. This mobile-friendly approach ensures students can interact with dynamic systems in real-time, enhancing their understanding through immersive, hands-on experiences.
In addition, the site comes with 4000 voiced, animated Power Points so that students can teach themselves.
The gyroscope
The course notes, designed for second-year students, carefully distinguish between Tait and Euler angles, explaining their distinct purposes. Using the Moving Frames approach, the notes illustrate how a free body can be modeled using either set of angles. However, they highlight that Euler angles are generally more suited for machines, while Tait angles are preferable for free bodies. Furthermore, with the adoption of Moving Frames, traditional concepts like body cones and space cones, which were once invaluable, are rendered obsolete; one simply views the motion from an alternate frame.
Improving engagement in engineering education
In her final years, the American philosopher Gertrude Stein was asked, “What is the answer?” She famously responded, “What is the question?” This exchange highlights the importance of clarity in inquiry—a lesson often overlooked in traditional engineering education. Textbooks have long burdened students with convoluted problem statements that test reading comprehension more than engineering principles. For example, a typical problem embeds key details within dense phrasing. Such barriers divert attention from the actual learning objectives.
The Moving Frame Paradigm (MFP) addresses these challenges through a fundamental shift in pedagogy. It prioritizes clarity, breaking down complex concepts into manageable, visually engaging segments. Digital materials utilize techniques like color-coding, animations, and interactive 3D visualizations to reinforce understanding. Equations evolve dynamically on-screen, emphasizing changes in terms and their roles. Each step in problem-solving is carefully illustrated, ensuring no detail is overlooked. By spreading content across many pages and incorporating vivid colors, students can follow a clear and logical progression without feeling overwhelmed.
The Moving Frame Method (MFM) directly addresses challenges that can disproportionately affect women in engineering education, particularly in visualization and engagement. Research indicates that men, on average, may excel in spatial reasoning tasks, which traditional dynamics courses rely on heavily. The MFM mitigates this gap by incorporating interactive 3D animations and TikTok-style swipe learning, which break down complex spatial concepts into intuitive, bite-sized lessons. These tools provide women with alternative pathways to build spatial reasoning skills, leveling the playing field.
Moreover, MFM's emphasis on real-world applications in robotics, drones, and smart systems connects the curriculum to tangible, modern technologies. This relevance can be especially impactful for women, who often seek context and purpose in their studies. By replacing rote memorization with visual, interactive, and engaging tools, MFM fosters a deeper, more confident understanding of 3D motion.
Finally, MFM's clear, consistent notation reduces the cognitive load often associated with traditional methods, making it easier for students to follow and retain material. These innovations create an inclusive, supportive learning environment that empowers women to succeed and thrive in engineering, helping to close the gender gap and inspire long-term engagement with the discipline.
Validation of the method
There exists a preliminary introduction of the method, 16 with summative assessment.
Many papers have been published in peer-reviewed archival journals using this method. A brief listing of the topics covered: Subsea ROV, 22 Gyroscopic Ship Stability, 23 Snake Robots, 24 Floating Wind Turbines, 25 The Tennis Racket Flip, 26 The Stewart Platform, 27 Active Beam Models. 28
Many papers, using this method, have been published in peer-reviewed conference proceedings, and int this case, the italics indicates they were all written by undergraduate students. A brief listing of the topics includes: Gyroscopic wave energy, 29 Dual Gyroscopic Wave Energy, 30 Ship stability,31,32 Collisions, 33 Robotic Cars.34,35
One may view all the papers on the website: https://movingframe.org/StudentPapers/StudentPapers.html
Future work
The MFM can be expanded to account for the following:
Frobenius Theorem for a continuous flow of frames for large deformation of beams Frobenius Theorem for a continuous flow of frames for fluid mechanics Gimbal lock (deposit a new frame) Four joint mechanics: Translational, revolute, universal and ball and socket. Gears in 3D, by studying not the spatial point of contact but the material point. Closed loops
The authors of this paper and the website will not have the time to investigate these. This is wide open for research. However, the author is happy to guide researchers on how to approach these topics. In addition, the author offers his services to those who wish to engage in a more formal assessment of the method.
Concluding remarks
The Moving Frame Method (MFM) revolutionizes the teaching of mechanical engineering by breaking free from outdated traditions and embracing twenty-first-century learning. It bridges the gap between old-school theory and the technology-driven world engineers now navigate, offering a dynamic, interactive approach to rigid body dynamics that makes 3D systems come alive and connects students to real-world applications.
By harnessing tools like WebGL, color-coded equations, and mobile-friendly animations, MFM speaks directly to today's digital learners. It ignites curiosity, sharpens problem-solving skills, and equips students to face complex challenges with confidence and clarity.
This paradigm flips traditional engineering education on its head, focusing not on efficiency but on deep, lasting understanding. It prioritizes student experience, innovation, accessibility, and full engagement, arming the next generation of engineers with the tools needed to excel in a fast-moving world.
The choice outlined here is a pivotal one—a fork in the road between fast fixes and true mastery. While tackling simpler 2D problems may yield quick results, it risks glossing over the richer insights unlocked by mastering 3D dynamics. MFM champions a slower, more deliberate path: learning new mathematics, embracing the complexity of 3D systems, and developing an intuitive grasp of how machines truly work.
Through matrix multiplications, MFM transforms complex mathematics into something accessible and empowering. It's not about quick answers—it's about fostering a deeper understanding of mechanics. This method unlocks mastery and makes even the most complex systems intuitive. It's an investment in long-term knowledge that traditional methods simply can’t offer.
Footnotes
Acknowledgements
I gratefully acknowledge the Western Norway University of Applied Sciences (HVL) for providing the platform to develop and expand the Moving Frame Method (MFM). Their unwavering commitment to innovative teaching methods and focus on pedagogy have been instrumental in this endeavor. HVL's mission to create new knowledge and expertise, anchored internationally with locally effective solutions, has inspired and guided this work.
Consent for publication
Two images from existing text appears. If the paper is accepted, it will take me four hours to replicate them as my own.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Example text of a Data statement, as provided by the author.