
Abstract
Exploiting preview information of disturbances within robot control is an effective method of handling state perturbations. For underwater vehicles operating in wave-dominated environments, disturbances significantly influence vehicle response and pose a threat to operational safety. In consideration of this, a complete end-to-end control architecture is developed in this work for disturbance rejection during station keeping tasks under wave perturbations, encompassing a nonlinear model predictive controller (NMPC) combined with a deterministic sea wave predictor (DSWP). The wave predictor exploits a continuous measurement of the wave elevation at a location upstream of the vehicle to form a forecast of the temporal evolution of the wave elevation at the vehicle location. The predicted wave parameters are then used to estimate the impending wave-induced hydrodynamic loading, enabling explicit consideration of accurate short-term disturbance forecasts within the controller, ensuring this preview is incorporated in the optimised control sequence. Experimental testing confirms the validity of the wave predictor, producing RMSE as low as 0.017 m. The proposed strategy is then simulated under various wave conditions, optimising control actions inclusive of the preview information. The NMPC outperforms a similar disturbance mitigating feed-forward controller, with average improvements of up to 52% and is found to perform best even with noisy, lower accuracy wave predictions, as well as with communication time delays, providing a high degree of robustness. This demonstrates the potential of the proposed control framework to effectively tackle disturbance mitigation of underwater vehicles subject to large magnitude wave disturbances, expanding the operational envelop of autonomous systems towards forbidding ocean environments.
Keywords
1. Introduction
Significant investment has been made into the development of marine robotics in recent years, with the offshore industry looking to exploit the sector’s dramatically advancing current capabilities (Khalid et al., 2020). In the oil and gas industry, remotely operated vehicles (ROVs) are already routinely deployed for inspection and maintenance purposes to increase the safety of associated tasks whilst also reducing costs incurred (Yu et al., 2019). The use of underwater vehicles for inspection and maintenance operations is currently being expanded towards the marine renewable sector. However, wave energy converters, tidal turbines and offshore wind farms are all located in highly energetic climates in order to operate effectively (Sivcêv et al., 2018; Trslić et al., 2018), making the reliance on autonomous vehicles problematic. For example, underwater manipulation and inspection operations at close proximity to a submerged structure require stringent positional constraints for safety during station keeping tasks (Koltsidopoulos et al., 2021). Here, traditional feedback control or piloted control may be unfit due to large magnitude wave disturbances, significantly influencing vehicle behaviour (Walker et al., 2021b).
Other classical methods such as sliding mode or adaptive control (Fischer et al., 2014; Sebastian, 2007) have been proposed to reduce set-point error, adopting state estimation techniques (Long et al., 2021) or exploiting in-situ sensor fusion to estimate and mitigate disturbances (Hosseini and Seyedtabaii, 2016). However, an inherent trait of these approaches is the inability to consider constraints or incorporate a plant model, resulting in inefficient and often ineffective control. This also relates to methods such as H ∞ /H2, which although offer robustness can be impractical for systems with large dimensions due to complexity (Sedhom et al., 2020). Disturbance observers have been proposed to improve control performance, but these have been limited to steady or impulse perturbations instead of realistic time-varying waves (Guerrero et al., 2020; Selvakumar, 2012). This has ultimately led to the consideration of optimal control architectures, such as predictive methods which encompass some form of wave forecasting (Halvorsen et al., 2020), but the formulation of a complete end-to-end framework for rejecting hydrodynamic disturbances remains elusive.
One method which has received significant attention has been model predictive control (MPC), proposed for tasks including motion planning (Wei and Shi, 2023) and trajectory tracking (Long et al., 2021; Molero et al., 2011). Approaches have varied, for example, using a Lyapunov-based MPC (Shen et al., 2017, 2018; Wei et al., 2021) or a sampling-based MPC (Caldwell et al., 2010). Where these approaches lack is the consideration of external hydrodynamic disturbances, often neglecting them entirely or assuming the disturbance to be perfectly known, providing no method of estimating the load on the vehicle (De Oliviera et al., 2022; Fernandez and Hollinger, 2017). This is similar to works that have examined reinforcement learning (RL) (Anderlini et al., 2019; Chu et al., 2023; Yu et al., 2017) and other artificial intelligence (AI) based methods (Van De Ven et al., 2005); disturbances are either neglected, considered as system noise, or simulated with a constant magnitude. This ultimately hinders their applicability to real-world scenarios. Considering disturbances within the MPC architecture directly has been investigated for wave energy converters, often assumed to operate at a fixed-point (Li and Belmont, 2014a, 2014b; Richter et al., 2013) and over large timescales. Including a preview of oncoming disturbances shows promise to enhance control performance (Monasterios and Trodden, 2019; Xu and Peng, 2020; Zhan and Li, 2019), in contrast to the typical approach of handling disturbances in MPC which models the disturbance as a source of noise and generalises the mitigation process. The flaw in this process is the potential of instabilities when larger disturbances are encountered (Fang and Chen, 2022); this is common when operating near marine renewables, with large magnitude waves common-place. Given ocean waves are inherently deterministic, it is postulated that the disturbance can be forecast and incorporated as preview information within the MPC optimisation process, mitigating unwanted displacements and substantially reducing the possibility of instabilities arising.
To achieve this, the accuracy of hydrodynamic load estimations is key to exploit the preview element – this forms a key priority for a fast, ad-hoc wave predictor. As noted above, ocean waves possess a degree of predictability and periodicity, therefore short term wave forecasts can be exploited to provide a time-varying prediction along the control horizon, thus realising the full potential of the MPC method. Disturbance observers could be used to achieve this (Yang et al., 2016, 2020), but attempts in this context have been tailored towards unknown or impulse-like disturbances such as wind gusts (Liu et al., 2012), limiting applicability. Alternative propositions for effective wave estimators have focused on learning-based methods (Walters et al., 2018) or using auto-regressive models (Ge and Kerrigan, 2016; Pena-Sanchez et al., 2020). However, recent literature has demonstrated no real benefits derive from using complex nonlinear models (Fusco and Ringwood, 2010), strengthening the case for simpler (and faster) techniques, especially for short time-frame predictions.
With respect to this, deterministic methods (Al-Ani et al., 2020; Belmont et al., 2006a, 2006b) that employ explicit low-order models have shown great promise at producing accurate forecasts of the sea surface elevation over short-term horizons. These techniques have been mainly oriented towards optimised operation of wave energy converters (Fusco and Ringwood, 2010, 2012; Li et al., 2012), but adaptation for subsea vehicle control has been largely disregarded. The key advantage of a deterministic approach is the process remaining agnostic to the sea state, with predictions formed solely on real-time measurements related to the wave elevation. Furthermore, the fact that the wave measurement site and the prediction site are distinct in space, a deterministic sea wave prediction (DSWP) is highly advantageous from the perspective of deploying an MPC strategy, as it allows sufficient time to predict wave disturbances before the vehicle experiences the induced forces/torques.
With reference to the above, this paper presents a complete end-to-end architecture for fast prediction and rejection of wave-induced hydrodynamic loading on an ROV by means of a nonlinear model predictive controller (NMPC). Here, we consider a preview of future time-varying disturbances, explicitly including these in the control action optimisation with the goal of improving station keeping control. This disturbance preview information can be transmitted from the measurement point to the vehicle (prediction point) using one of two methods (1) wireless transmission to a base station and relayed to the vehicle via a tether or (2) wireless transmission underwater directly to the vehicle, if operating untethered; see Figure 1. Both of these methods have benefits and drawbacks and are analysed further in Section 5.6. Conceptually, the framework entails the following strategy (see also Accompanying Video) schematically depicted in Figure 1: (a) measurements of sea surface elevation are accumulated at a fixed-location distant from the vehicle; (b) DSWP forms an estimate of the sea spectral parameters to predict the surface elevation at the vehicle location over a future time interval; (c) this information is transmitted to the vehicle using one of the two communication methods shown in Figure 1; (d) the future wave elevation profile at the vehicle is exploited to estimate the future time-varying hydrodynamic disturbances (leveraging previous validations detailed in (Walker et al., 2021a, 2021b)) at the vehicle’s depth which (e) are explicitly accounted for within the NMPC to yield a future sequence of optimised control actions. Information of the vehicle location is obtained through an extended Kalman filter (EKF) and the full strategy is tested across three different sea climates. Similarly, the performance of the control is analysed in the presence of varying levels of noise associated with the wave observer, along with varying degrees of time delay exhibited during communication between the measuring device and the vehicle, producing evidence of high robustness in the proposed method. Schematic representation of the proposed end-to-end protocol – the ROV receives predictive information relating to the oncoming wave from a measuring device upstream which the onboard control can exploit to compensate for future hydrodynamic disturbances. This information can be transmitted wireless to a base station and relayed to the ROV via a tether (communication option 1), or if operating untethered transmitted wireless directly underwater (communication option 2).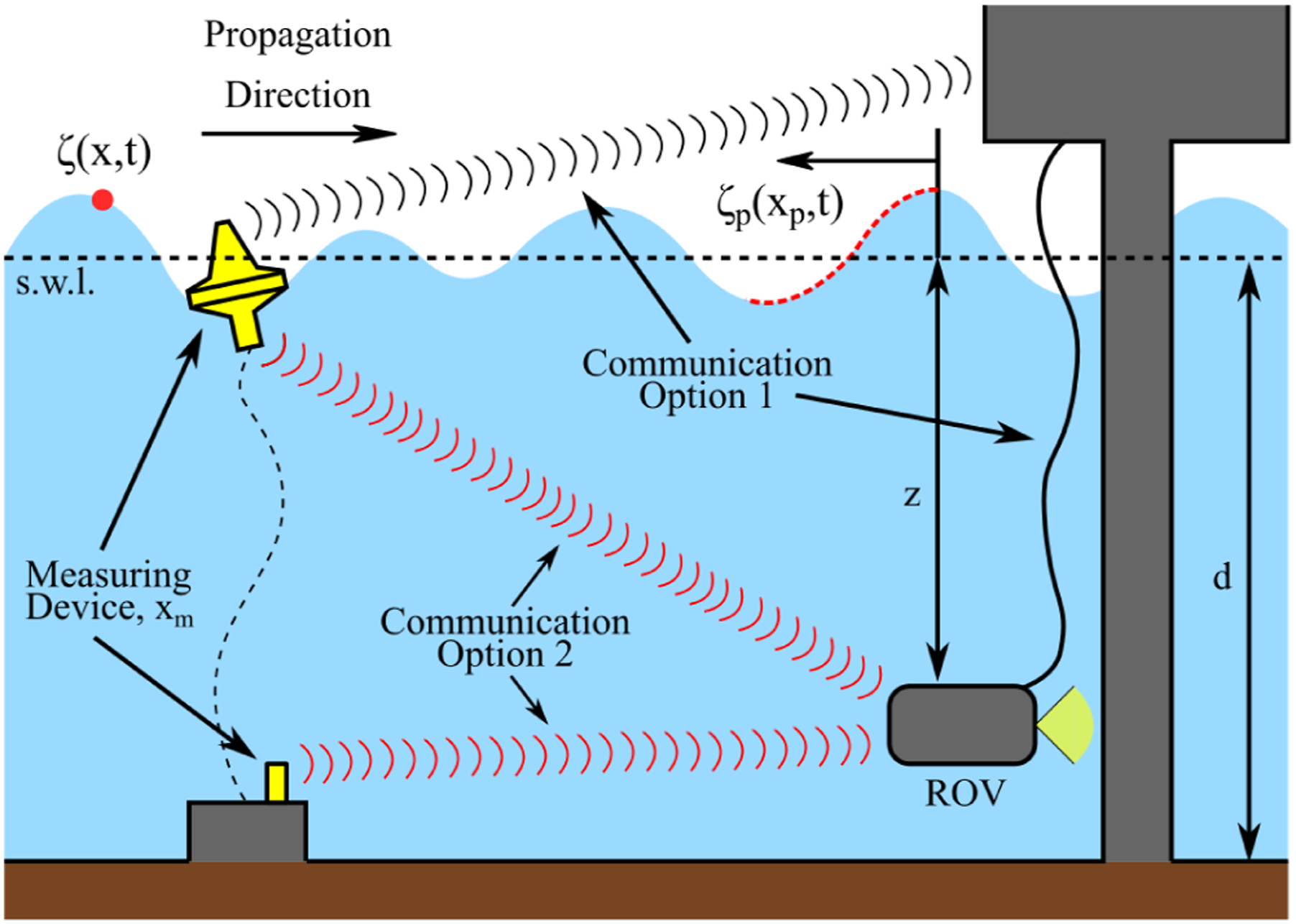
Ultimately, this work addresses the challenge of ROV operation in hazardous sea conditions by providing: (1) an experimental validation of a robust predictor for wave-induced disturbances over future, short-term, time-horizons; (2) the implementation of an NMPC architecture able to explicitly exploit the disturbance preview information to perform effective disturbance rejection; and (3) an in-depth analysis of the robustness of the proposed NMPC with preview method in handling noise and uncertainty, both in the elevation measurements and disturbance predictions. Conjunctionally, a discussion on the trade off in terms of power requirements during station keeping tasks is provided. This study proves the high potential associated with explicitly forming accurate future temporal wave predictions and implementing this directly within a real-time control scenario, providing a solution for close-quarters inspection and maintenance of shallow water offshore assets.
2. System modelling
2.1. Kinematics
The 6 degree-of-freedom (DoF) kinematics of the vehicle in the body-fixed frame relative to the earth-fixed frame is given by (Fossen, 1994): The BlueROV2 heavy, labelled with SNAME notation and displaying the earth-fixed and body-fixed co-ordinate frames.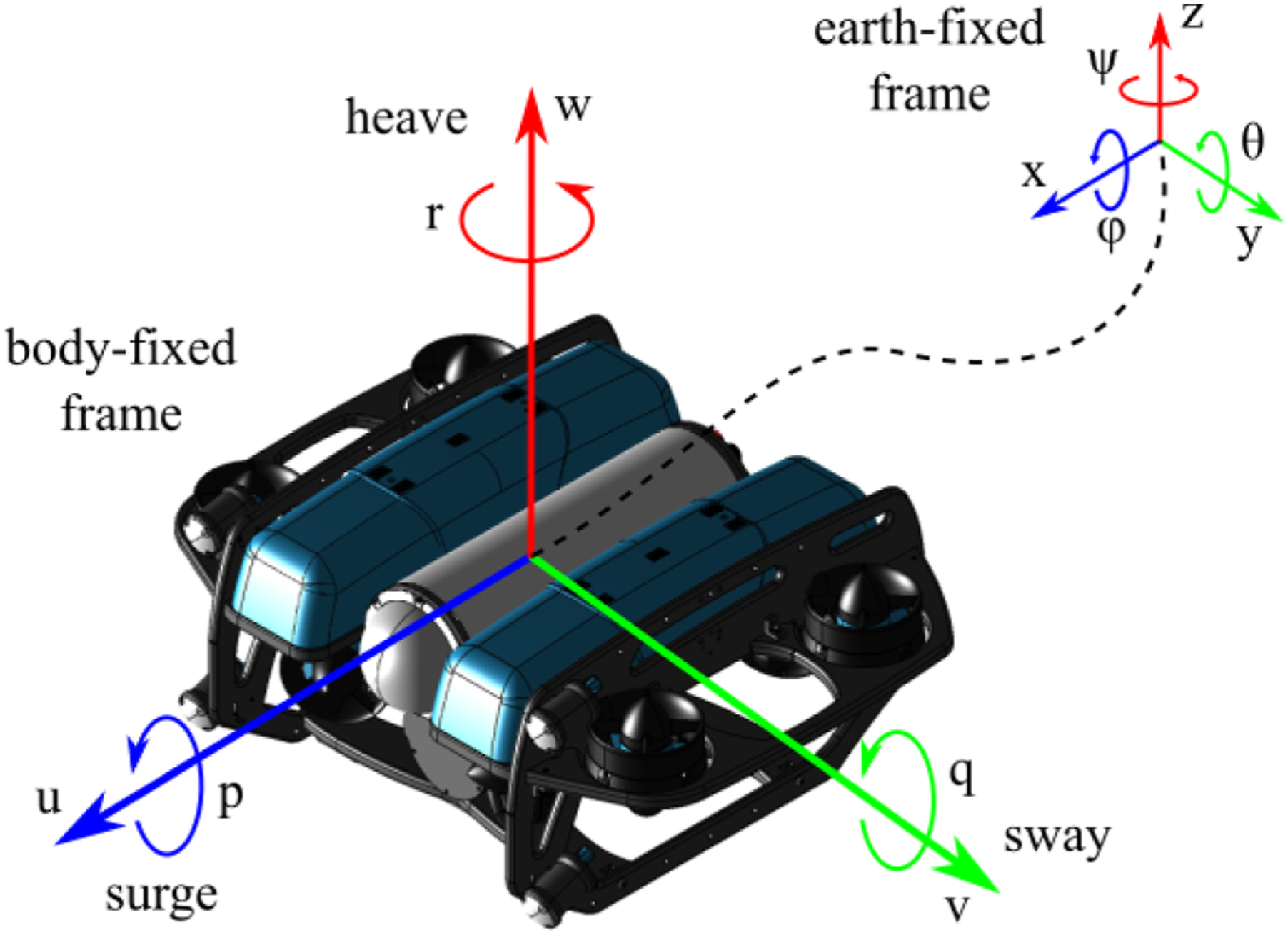



2.2. Dynamics
Considering the kinematic description in Section 2.1 and under the rigid-body approximation, the nonlinear dynamic behaviour for an underwater vehicle is described by:

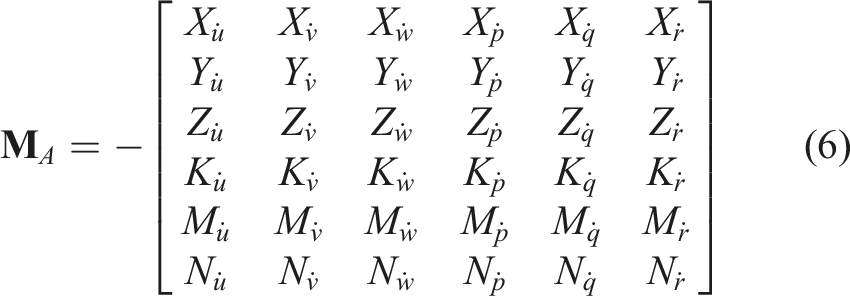
The inertia matrix is inclusive of added mass effects and is therefore defined as

With respect to the added-inertia matrix, adopting the notation of SNAME (Fossen, 1994) it follows that:
With respect to hydrodynamic damping, these effects can be conveniently grouped into contributions from linear and quadratic terms,

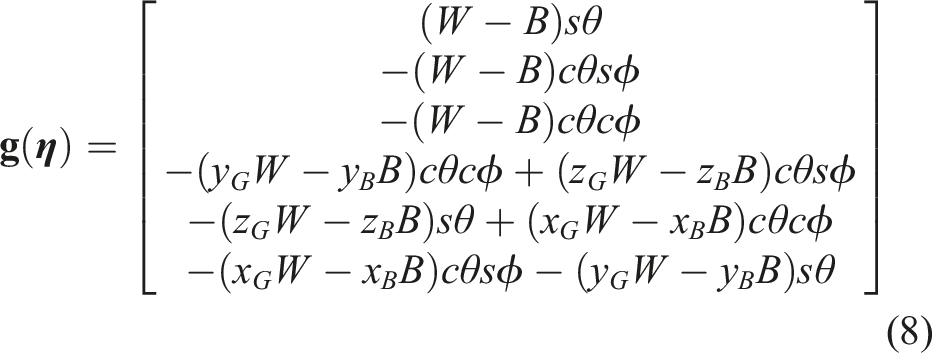
Finally, all terms arising from gravitational and buoyancy forces are grouped into a column vector dependent on the position of the vehicle centre of gravity (CoG),
The centre of gravity (CoG) of the vehicle is aligned with the origin of the body-fixed frame:

The centre of buoyancy (CoB) of the vehicle is assumed to be aligned with the origin in the longitudinal and lateral axes:

The vehicle is considered to possess two planes of symmetry, fore-aft and port-starboard, owing to the vehicle design, thus the added mass matrix can be reduced to:
The damping matrix can be simplified to purely diagonal-form due to the vehicle symmetry, where the remaining off-diagonal elements after Assumption 2.3 are assumed negligible:



2.3. Wave-induced disturbances
The focused applications of our proposed method are based in shallow water environments where wave breaking is not occurring, but where wave disturbances are prominent across the upper section of the water column. To account for hydrodynamic forcing from random sea states, a second-order model of the wave elevation and particle trajectories beneath the sea surface is adopted. In the cases considered throughout this work, the wave elevation is modelled to propagate in a single direction and can be considered as a planar two dimensional wave.
Ocean waves are considered to propagate uni-directionally and interact with the vehicle head-on, allowing simplification to a planar case in relation to the vehicle dynamics.
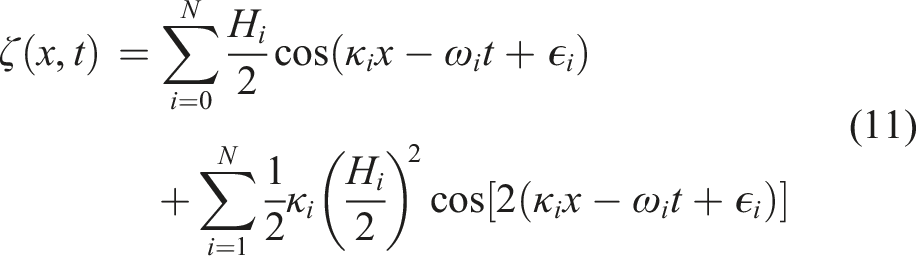
Assuming that the sea state can be described by a spectrum of N monochromatic components, each with a unique wave height, H, period, T, and phase offset, ϵ and that the second-order effects can be linearly superimposed (McCormick, 2010), the surface elevation at a point (x, t) in space and time is described by:

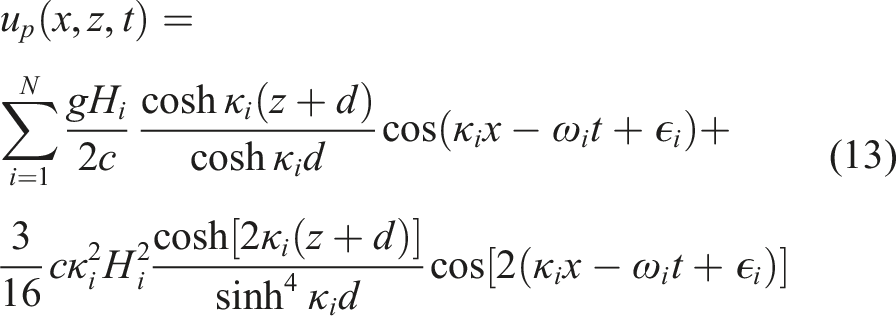
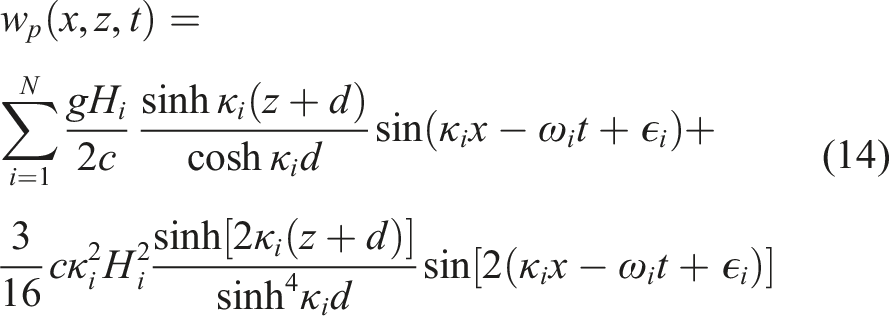
Spectral information also facilitates deduction of the particle velocities in the global frame, which for the surge and heave components are given by

As this work is an initial investigation of the proposed methodology and for the sake of demonstration, the analysis herein is restricted to a planar case focusing on uni-directional waves where disturbances to the sway, roll and yaw motion are negligible. Therefore, these can be regulated without explicit consideration in the optimised control. Therefore, the predictive strategy detailed henceforth is only applied to the surge, heave and pitch. Extension to a multi-directional wave case can be achieved by considering a sparse array of wave buoys rather than just a single point of measurement, for example, using the PTPD (Fernandes et al., 2000) or SPAIR method (Draycott et al., 2016).
3. Wave disturbance prediction
Short temporal prediction of future disturbances facilitates the inclusion of preview information within the control problem, framing this as an optimisation over a time horizon for which an optimal control trajectory can be calculated. To enable this kind of anticipatory control, a dedicated predictor of oncoming disturbances is required. As alluded to earlier, forming predictions ahead of time before the vehicle is subjected to any wave disturbances is crucial for inclusion in an NMPC scheme. The disturbance predictor proposed here relies on deterministic sea wave prediction (DSWP) (Al-Ani et al., 2020; Belmont et al., 2006a, 2006b) and specifically the fixed-point method. This method entails on-line inference of the sea state spectral parameters to produce short term forecasts of the future sea surface elevation at a point of interest, based purely on prior measurements of the wave temporal profile at some distance from the vehicle’s location.
3.1. Fixed-point deterministic sea wave prediction
The fixed-point variant of DSWP employed in this work accumulates temporal data over a period T
M
from a fixed location upstream of the vehicle at a distance x
P
, subsequently producing a prediction of the wave elevation and particle trajectories at the vehicle location, Figure 1. The sea surface is assumed statistically stationary for a time duration longer than the actual prediction window. Therefore, spectral parameters can be exploited to determine the sea state properties. By defining the wave measuring point as x
M
= 0, the sea-state frequency spectrum can be obtained by considering a wave-height record



For shallow water waves, the limit of the dispersion relation takes the form limd→∞ κ2 → ω2

Several well-known spectral representation are typically used, the two most common being the JONSWAP and the Pierson-Moskowitz. In this work, the JONSWAP definition is adopted to model the sea state and therefore this is assumed to be the ideal form returned by equation (18). The JONSWAP representation is defined by:

A key consideration when forming the prediction requirements and capabilities of the algorithm is to deduce the maximum length that the prediction will be valid, in accordance with the assumption of statistical stationarity of the sea state. This is dictated by the space-time diagram for the system, with an example shown in Figure 3. By analysing the celerity of the spectral components with the minimum and maximum frequency, the predictable region can be determined. To extend the prediction length, the wave spectrum is bounded such that components with minimal influence on the resulting waveform are disregarded. Space-time diagram for the fixed point method, where the grey area represents the region in which a prediction can be obtained. Here, xp,max is the distance at which a prediction of maximum time, tp,max is obtainable and dmax is the furthest point from the measurement site where the prediction can be considered reliable.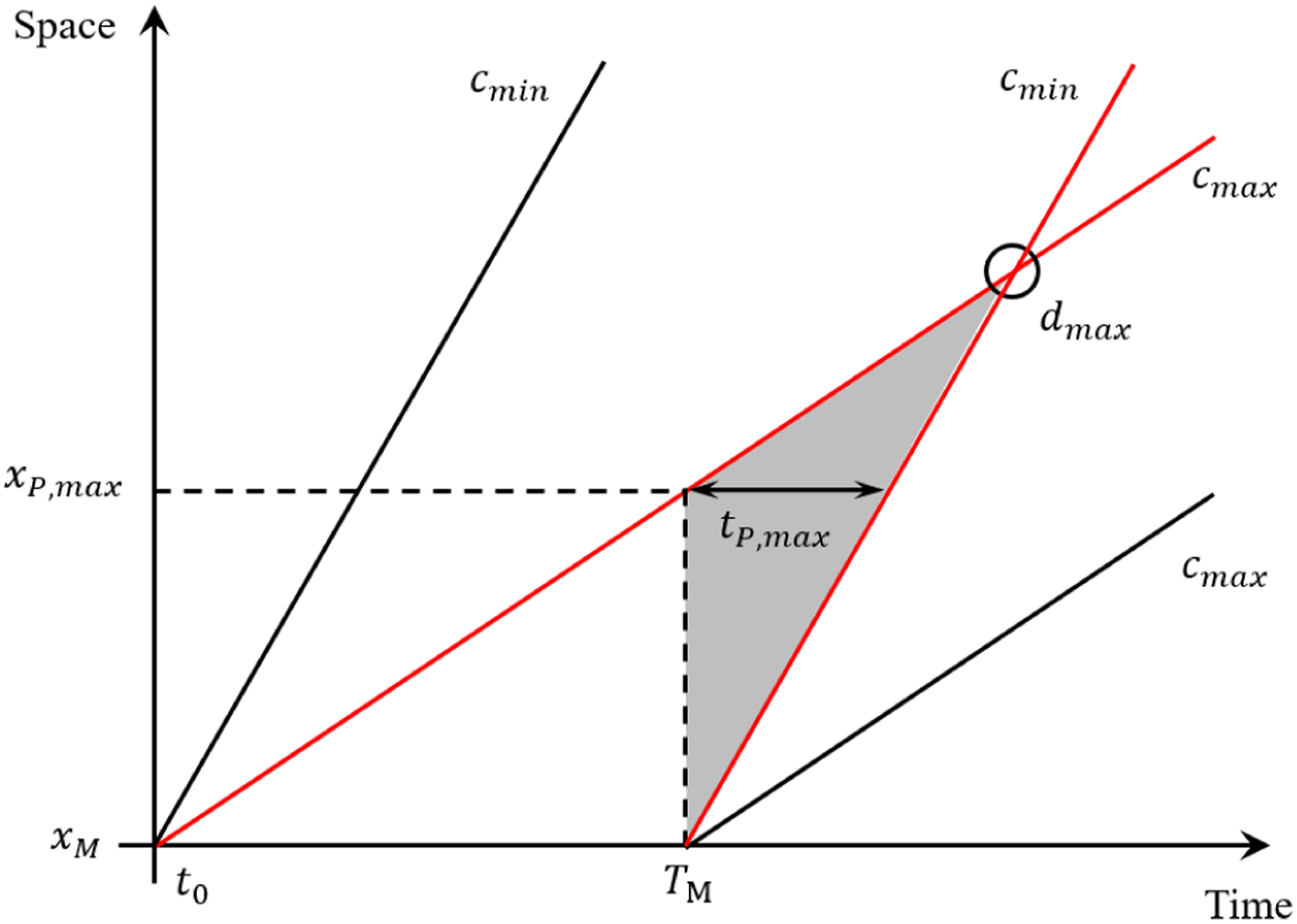
For any sea state, a wave spectrum S
n
can be identified such that bounding frequency components f
min
and f
max
can be prescribed, respectively, correspondent to spectral components S
min
and S
max
. Following this, the maximum valid predictable region can be determined with reference to the time-frame t
s
→ t
f
:

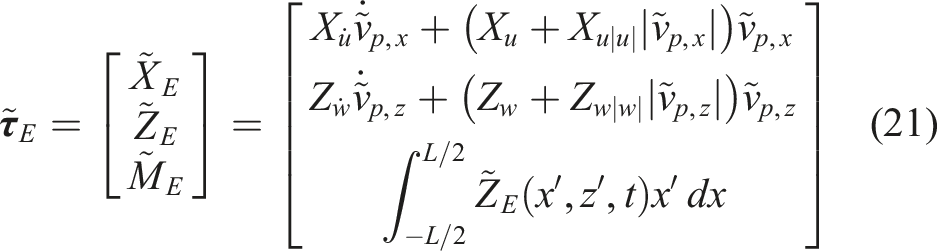
From the estimated spectral representation of the sea-state, equation (17) can be considered to predict the particle trajectories at the vehicle location beneath the surface, substituting x
V
into equations (13) and (14) to obtain
3.2. Experimental validation
As our application is tailored towards short horizon dynamic control, it was desirable to understand the physical limitations of the predictable region and the accuracy of the estimated temporal wave evolution. To this end, an experimental study was conducted at the FloWave Ocean Energy Research Facility at the
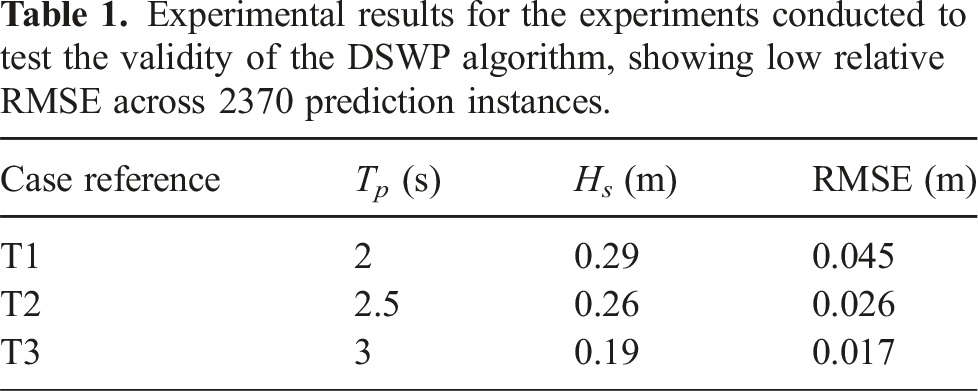
Experimental results for the experiments conducted to test the validity of the DSWP algorithm, showing low relative RMSE across 2370 prediction instances.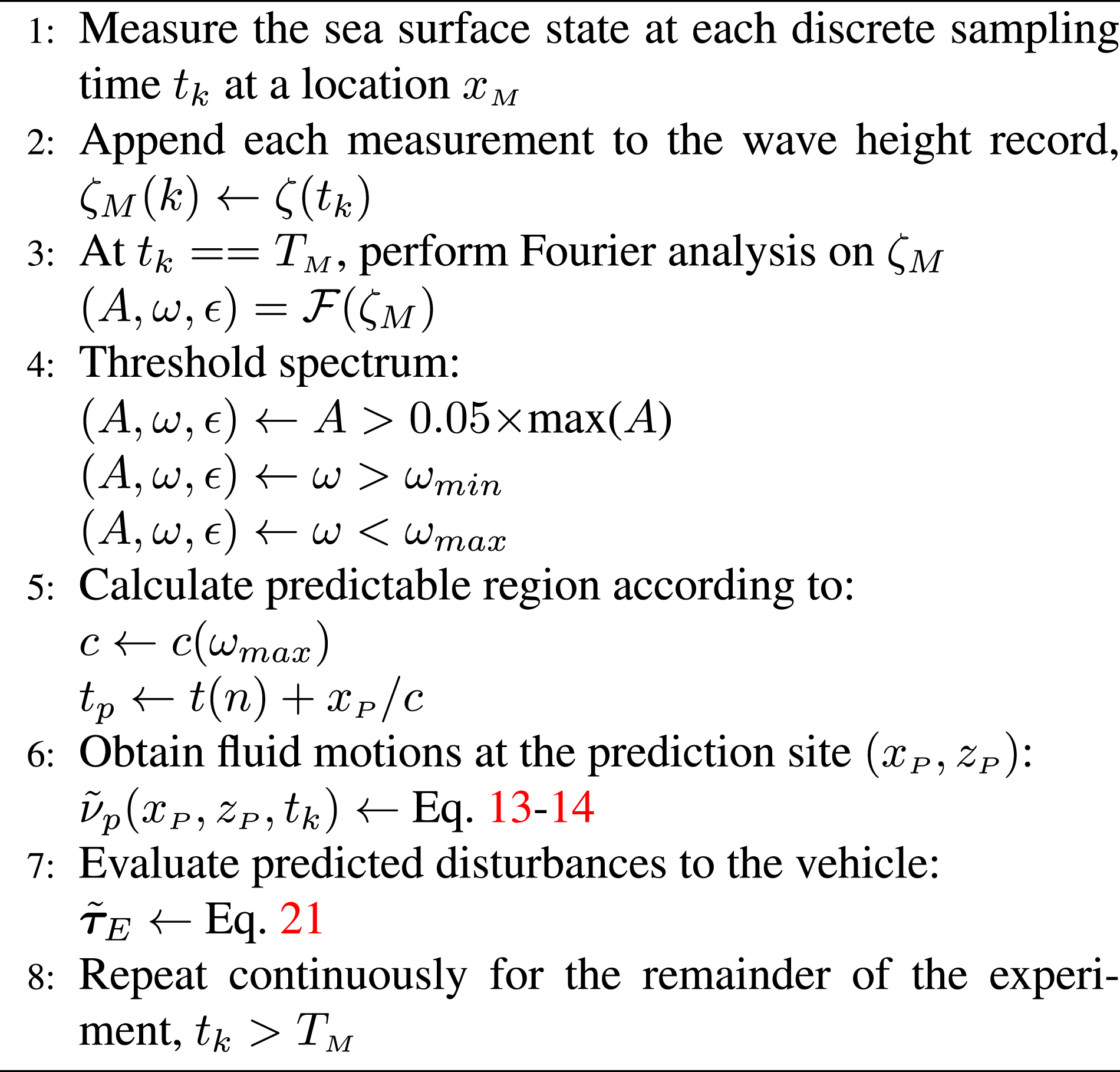
Due to the physical limits of the tank, the length of waves attainable was limited at the expense of larger wave height. A five-piece conductive wave gauge array was placed coincident to the propagation direction, with each unit equally spaced by 3.77m and with a maximum of 15.08m between the two furthest wave gauges (WG), indicated as WG1 and WG5. A gauge at the centre of the tank, WG3, was used as a reference position of 0m to align with the reference of the tank software when generating the wave formation. See Figure 4 for a visual representation of the arrangement stating the gauge labels and showing a recorded snapshot of a wave from case W2. The wave gauges monitoring the surface elevation have an accuracy smaller than 1 mm (MARINET, 2012), with a standard calibration of five points covering ± 100 mm conducted to ensure this high accuracy. Data collection and transfer is computationally inexpensive (Gabl et al., 2019), confirming its suitability for real-time usage as part of the disturbance preview formulation and control optimisation loop. The wave was recorded at each gauge location throughout the experiment duration of Experimental example of obtaining the results shown in Figure 5 and Table 1, displaying (a) a snapshot of the recorded wave train from the side-view, (b) wave gauge locations and wave height with respect to the tank x-axis from the top view, and (c) the experimental set-up. Due to Assumption 2.5 the wave is uniform across the tank y-axis, as shown in subplot (b).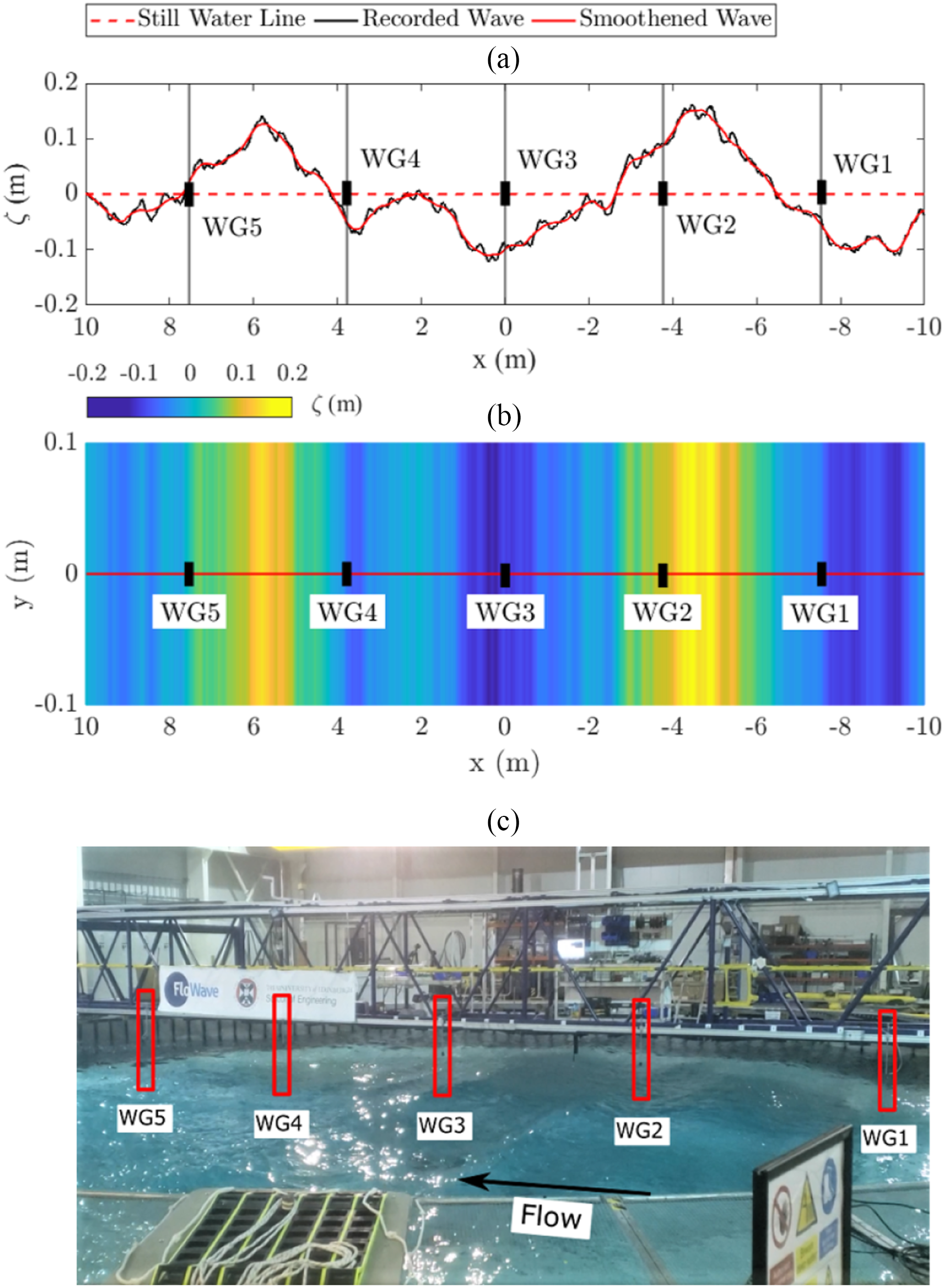
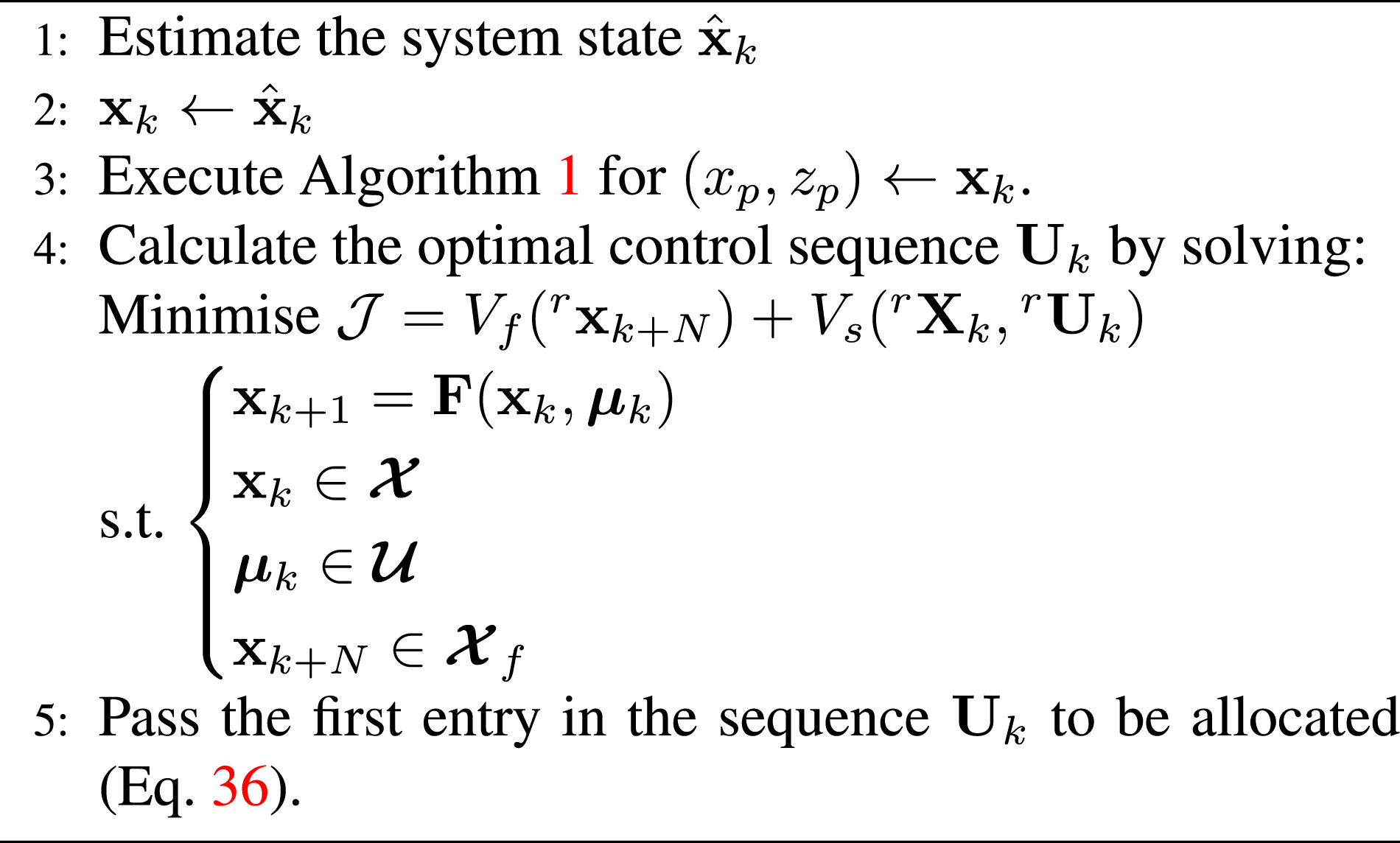
To analyse the accuracy of the DSWP algorithm, the root-mean-square-error (RMSE) of the wave elevation within the predicted region was evaluated by taking a prediction at each time-step and summarising the mean RMSE across all predictions. During this analysis, the first 300s of wave-height measurements at WG1 was accumulated before attempting to form predictions during the final 200s of the trial as a rolling temporal window relative to the length of the predictable region attainable. In Algorithm 1, the initial steps 1 and 2 refer to the initial accumulation stage. To maintain consistency, a sliding window was applied meaning only the previous 300s of wave measurements prior to the current time-step were used in the prediction process. The data was discretized at a rate of 16Hz, thus the analysis concerns 3,600 individual predictions – the reconstructed spectrum was bounded between fmin = 0.2Hz and fmax = 2Hz, allowing a predictable region of
The RMSE reported in Table 1 clearly indicates that DSWP is capable of estimating the wave height at the prediction site with high accuracy. The maximum RMSE of 0.045m refers to the wave with the shortest period, confirming that longer waves which are better approximated by a linear swell model are predicted with higher accuracy. This is convenient for control applications, as wavelength tends to increase with significant wave height and energetic climate conditions typically relate to spectra with larger peak periods. A set of rolling temporal prediction snapshots relating to case T2 are depicted in Figure 5, showing the measured wave elevation at WG5 against the prediction based on only measurements at WG1. Within Figure 5, a prediction is shown prior to the current time-step which can be explained by referring to equation (20). The time-frame t s → t f dictates the length where the assumption of statistical stationarity holds at the prediction site, thus also includes reconstruction of past wave elevations. The additional predicted section of the wave elevation arises from the shift in space (defined by the filter parameter κ n x). Each snapshot indicates the current time and the horizon over which prediction is performed, offering confidence in the capability of the predictor to generate a reliable temporal evolution of the sea surface at the point of interest.
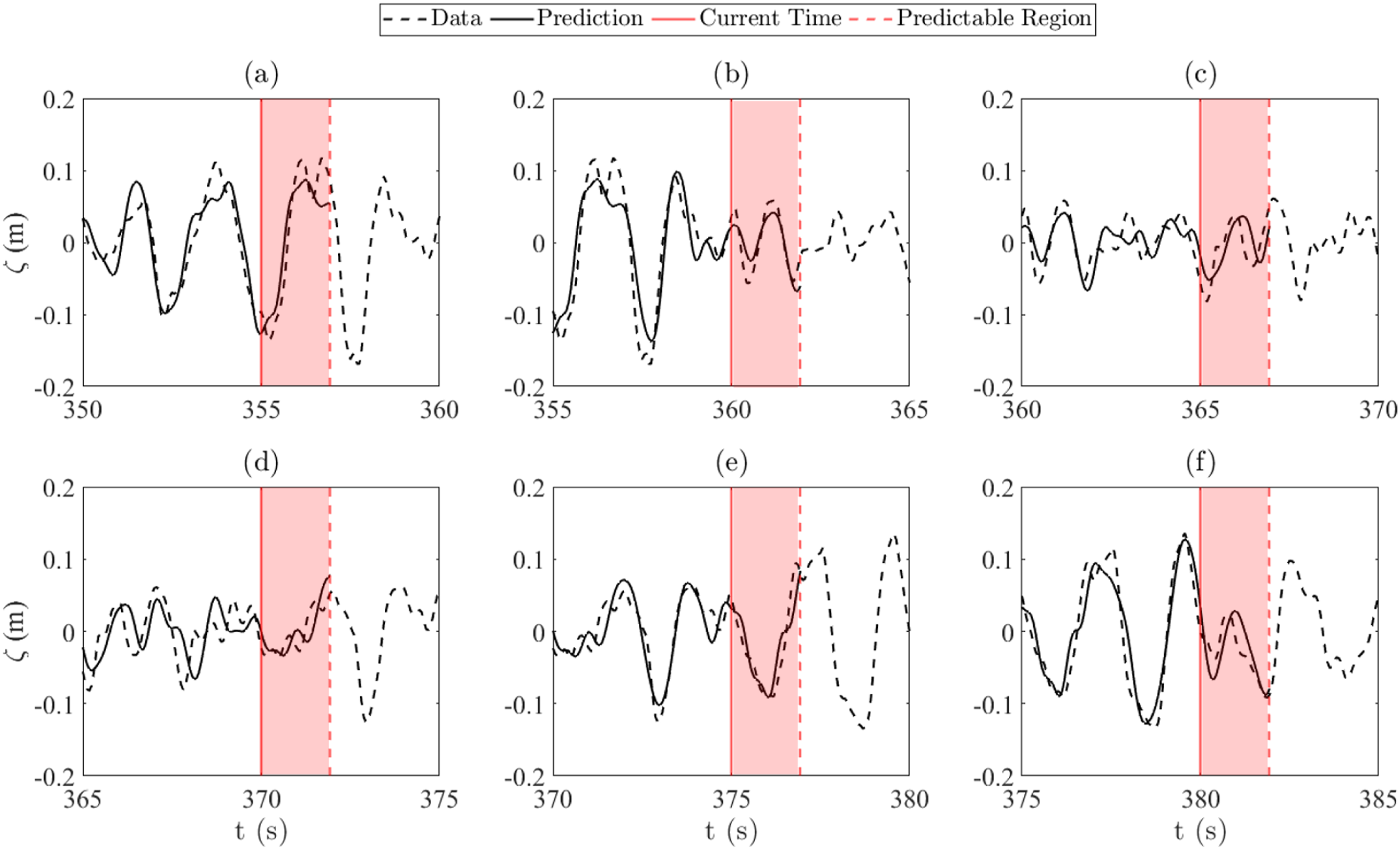
Various instances showing the DSWP algorithm producing accurate short-term predictions (
4. Nonlinear model predictive control
Given the results obtained from the prediction algorithm, the controller adopted for performing the station keeping task was a nonlinear model predictive controller (NMPC) coupled with an EKF for performing state estimation. This section details formulation of the optimal control problem.
4.1. NMPC formulation
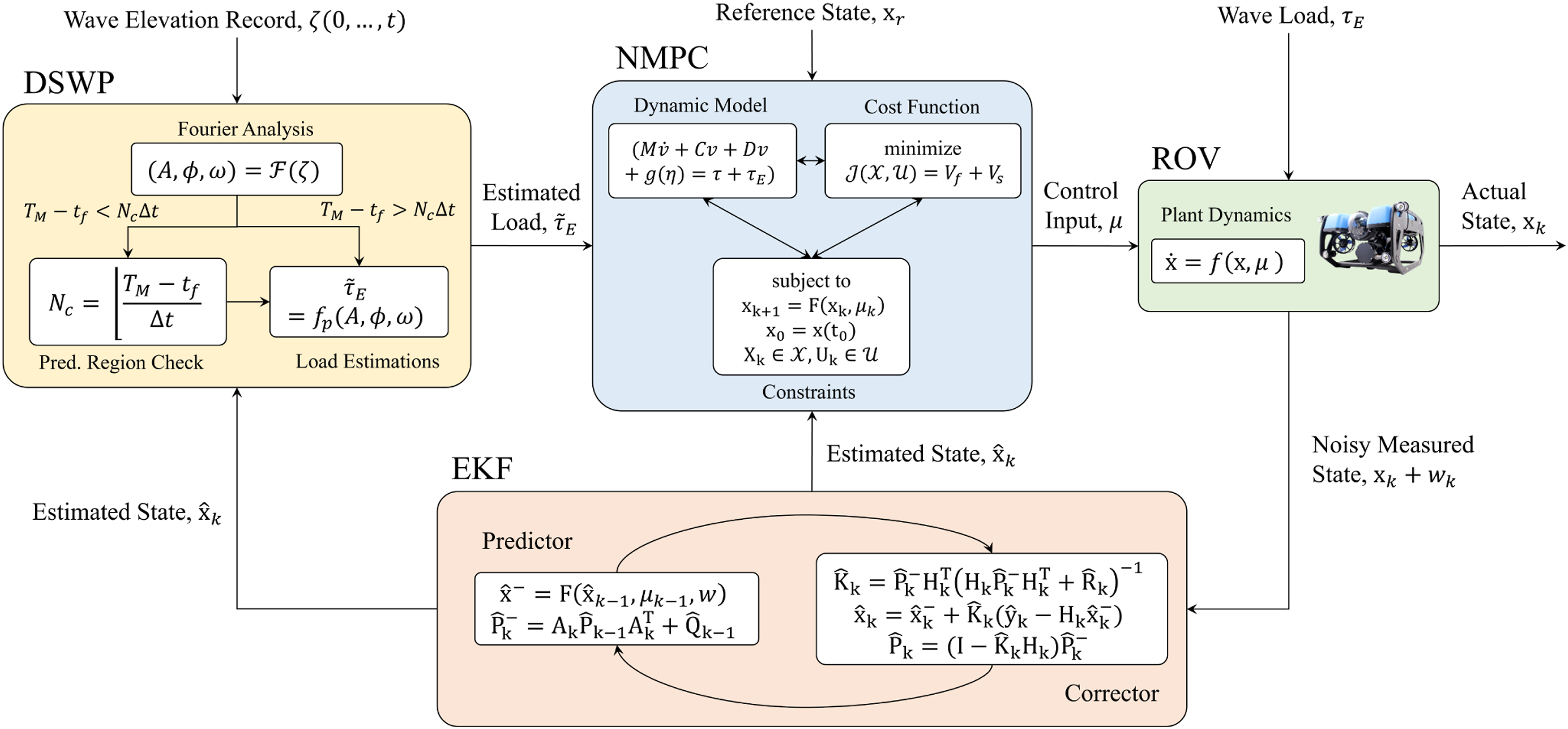
With reference to the theoretical model described in Section 2, the system state is defined as the position and velocity of the vehicle such that The proposed framework for predictive disturbance mitigation, showing each element in block diagram format. In the DSWP block, f
p
is a function which transforms the spectral parameters into wave loading – see equation (21).


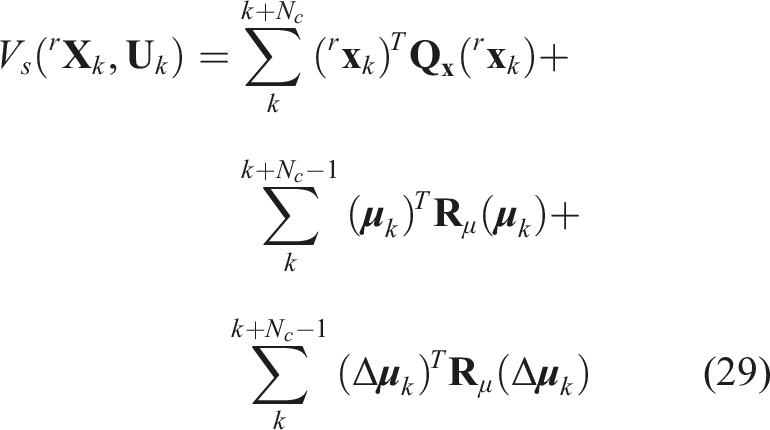
From this, the NMPC can be formulated for reference tracking using a quadratic cost function, by defining a reference state, 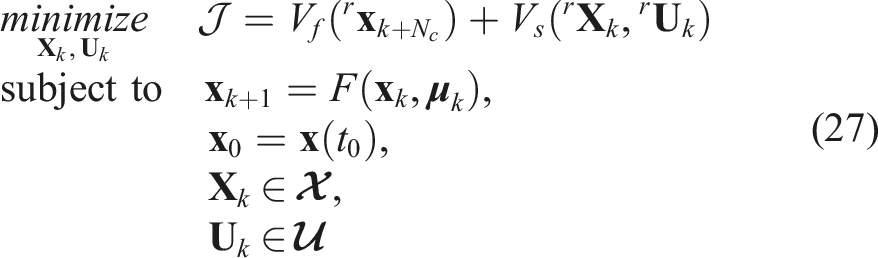

4.2. Integrated architecture
The NMPC and DSWP formulation assumes that the vehicle state is known in order to compute the wave-induced disturbances and subsequently the optimal trajectory. Hence, knowledge of the vehicle instantaneous position is key to the performance of the proposed system: a poor state estimation will yield a poor wave prediction. In real-world operations the vehicle’s absolute state is obtained from sensor readings, which are subsequently input to a state estimation algorithm to reduce the inherent uncertainty. Two well-known methods are the EKF (Simanek et al., 2015; Soylu et al., 2016) and the unscented Kalman filter (UKF) (Allotta et al., 2015), the former being computationally lighter but the latter handling nonlinearities better. Both are formulated assuming the vehicle’s state to be measurable by means of a DVL (velocity) (Soylu et al., 2016), an underwater acoustic positioning system (Munafó and Ferri, 2017) or a form of underwater SLAM (Hidalgo and Braunl, 2015), extending these sensor measurements to approximate the full state recursively.
In this work, a baseline EKF was opted for, owing to the need for a high frequency of algorithm execution critical for the NMPC to be effective. Also, because the specified task of station-keeping takes place in the proximity of a fixed-point, the vehicle velocity will remain low, thus yielding weak nonlinearities and giving confidence that the employment of an EKF will produce an accurate state estimation. It is arguable that the slow nature of acoustic positioning systems may negatively affect the wave-prediction accuracy, however, given that our target cases relate to operation in the upper section of the water column and under disturbances of much greater wavelength than the ROV body length, errors arising from timescale mismatch between state estimation and environmental forcing are deemed minor. On the other hand, the effects pertaining to prediction uncertainty do represent a major source of error in real-world applications, so are therefore delved into in greater detail in Section 5.5.
The EKF algorithm has two update phases: the predictor phase and the corrector phase. The predictor phase considers the initial estimates above and projects the error covariance and state ahead in time, such that:




Integrating the prediction algorithm, state estimator and control scheme constitutes the end-to-end framework proposed in this work, as indicated schematically in Figure 6.
5. Controller performance
5.1. Scenario configuration
In order to emulate the conditions the ROV may encounter under a typical operating scenario, real-world data was sourced and exploited to construct a representative sea state. Spectral data harvested by a wave buoy located in the Moray Firth, an inlet off the coast of Inverness in the north of Scotland (57°57′.99N, 003°19′.99W), was sourced from the online repository of the Centre For Environment Fisheries and Aquaculture Science (Cefas) (Cefas, 2021). The location of the buoy was chosen primarily due to the majority of offshore wind farms being located in areas of similar depth (d = 54m) or below (Bailey et al., 2014; Oh et al., 2018). Similarly, an offshore wind development is currently under construction at this location (MorayEast, 2021), thus making these spectral data-sets suitable for simulating typical inspection/maintenance tasks.
Statistical parameters for the three wave spectra considered in this work, varying in peak spectral period and significant wave height.
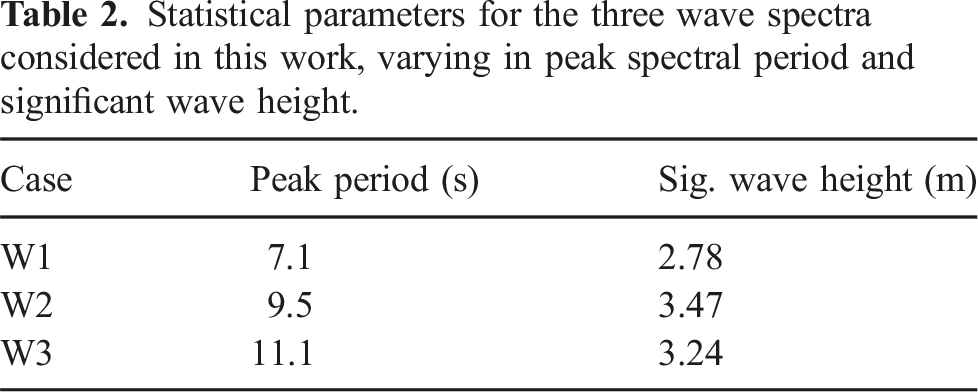
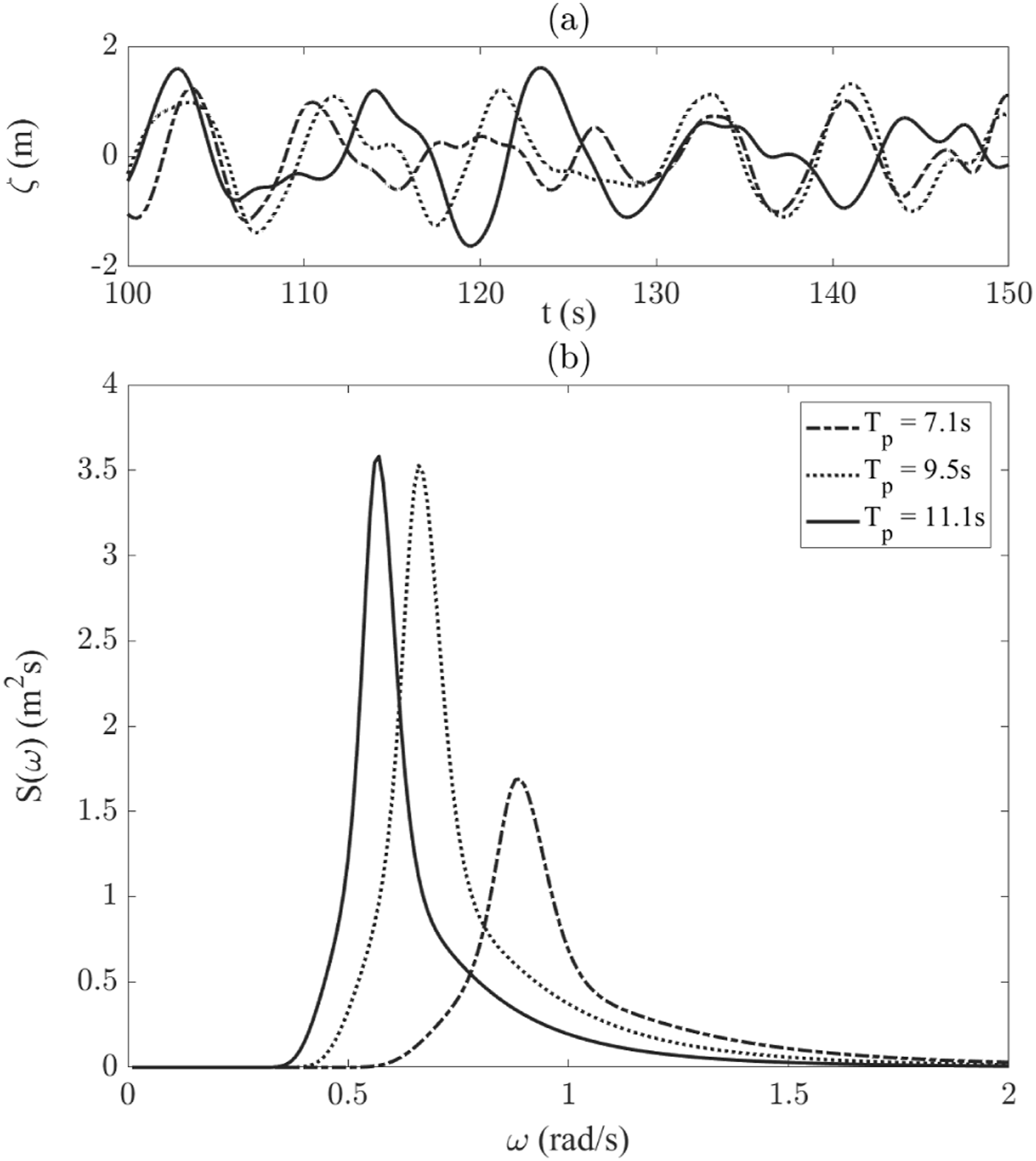
The three different spectra tested in this work, each following the JONSWAP description in equation (19).
5.2. Vehicle specifications and thrust allocation
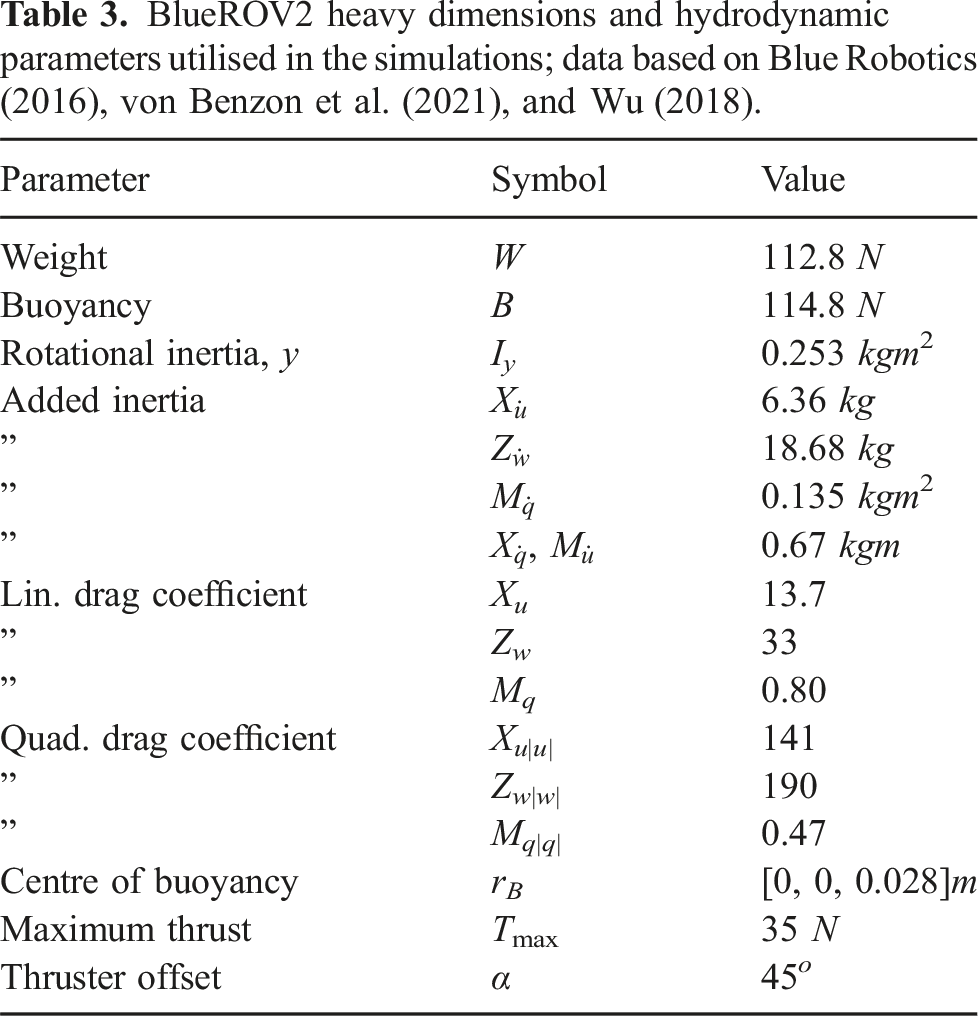
BlueROV2 heavy dimensions and hydrodynamic parameters utilised in the simulations; data based on Blue Robotics (2016), von Benzon et al. (2021), and Wu (2018).
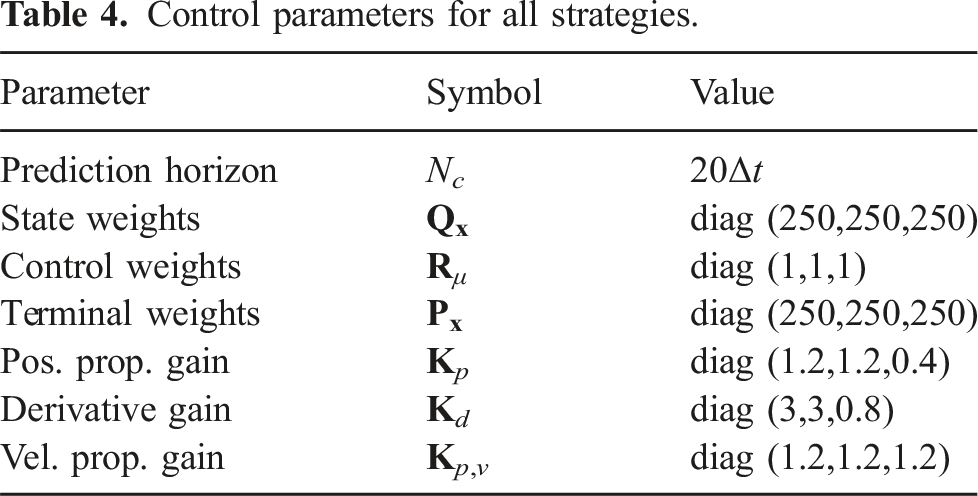
Control parameters for all strategies.
The BlueROV2-Heavy is controllable in all Do through an array of eight thrusters. The control vector is therefore
The controller inputs are normalised and bounded such that −1 ≤ μ
i
≤ 1, which relate to the extreme limits of the thruster capability.
An affine model is adopted (Fossen, 1994), adjusted to include a first order response term to represent the inherent time-delay in the system between the control input command and the produced torque from the motors. The contributions from propulsive forces in the vehicle local-frame are defined as:
5.3. Baseline controllers
To analyse the performance of the proposed framework, the NMPC with DSWP was compared against three baseline controllers: a cascaded position-velocity PD controller (referred to as C-PD from henceforth), a NMPC controller which does not include the wave disturbance preview information in the optimisation of the control actions (referred to as NMPC-B from henceforth) and a cascaded position-velocity PD with feed-forward (FF) controller (referred to as FF from henceforth). The first two are to provide a basic reference against controllers with no wave disturbance knowledge, with the latter incorporating the prediction algorithm to calculate disturbance compensating control actions but without an optimisation stage on the control trajectory. The NMPC-B architecture is considered “blind” with respect to wave-induced disturbances and this is effectively equivalent to the control anticipating
All controllers need to simultaneously control the heave and pitch through the same set of thrusters. To this end, a control allocation algorithm similar to that detailed in (Fossen, 2011) is employed using an inverse approach. This simplifies the control strategy by calculation of generalised control actions 


5.4. Station keeping accuracy
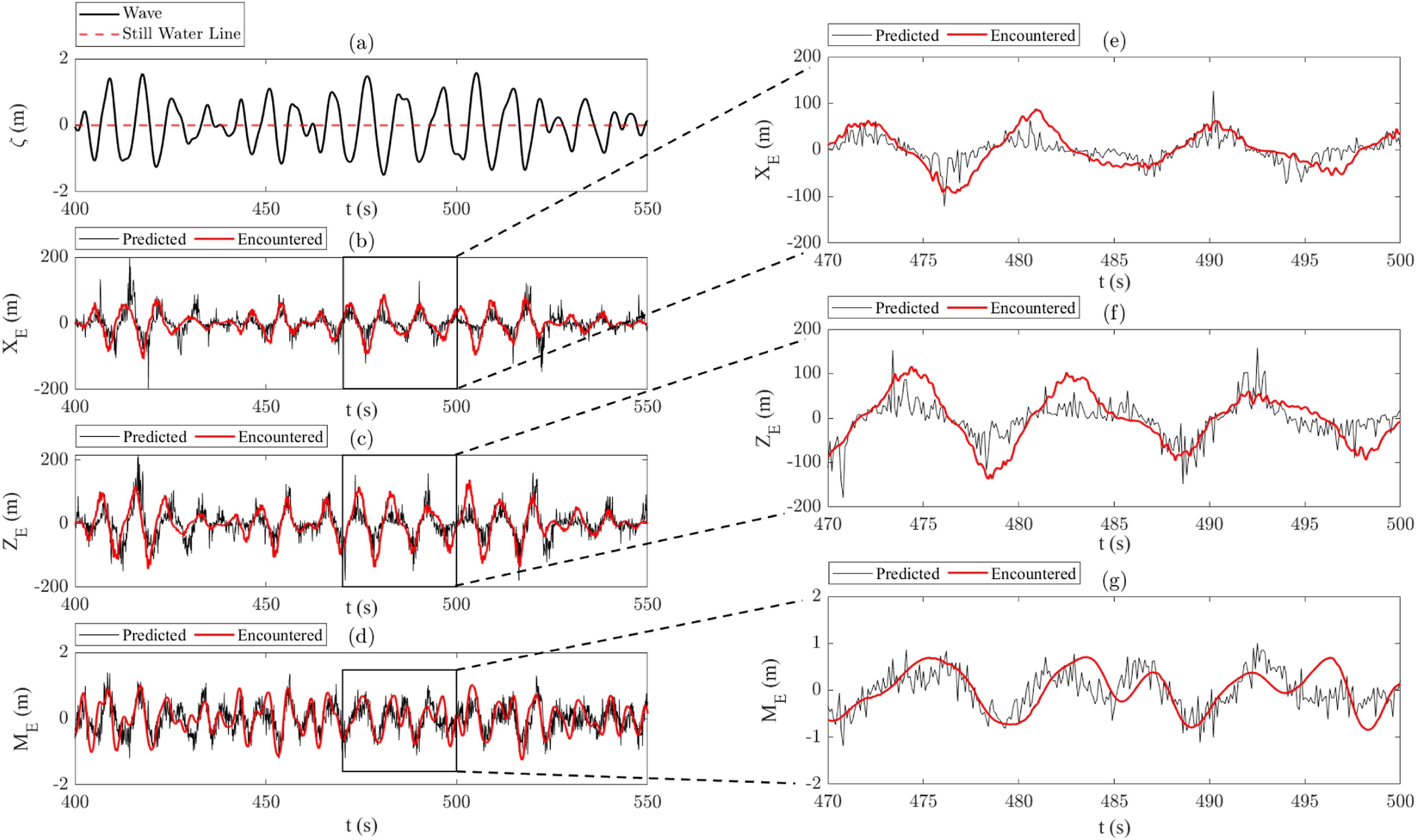
Initial performance analysis focused on the comparative performance against the three baseline controllers with minimal uncertainty in the system. Throughout these tests, only noise arising from sensor measurements was considered (inclusive of both wave elevation and state). A Gaussian filter was applied to the wave height measurements, whilst the EKF was utilised to reduce the uncertainty associated with the state measurements and produce the full-state vector. For all cases and DoF, the RMSE was analysed along with the maximum error that was recorded throughout the entire temporal segment for reference; an example case is displayed in Figure 8 with quantitative results given in Figure 9. Temporal segment of the station keeping simulation (b–d) subject to the wave profile shown in (a) and the associated enlargement (e–g), showing the positional evolution for case W2. Here, the reference state is defined as (a, c, e) RMSE and (b, d, f) maximum error observed for each DoF and sea state considered for the station keeping mission where only sensor noise is considered and zero additional spectral noise is present.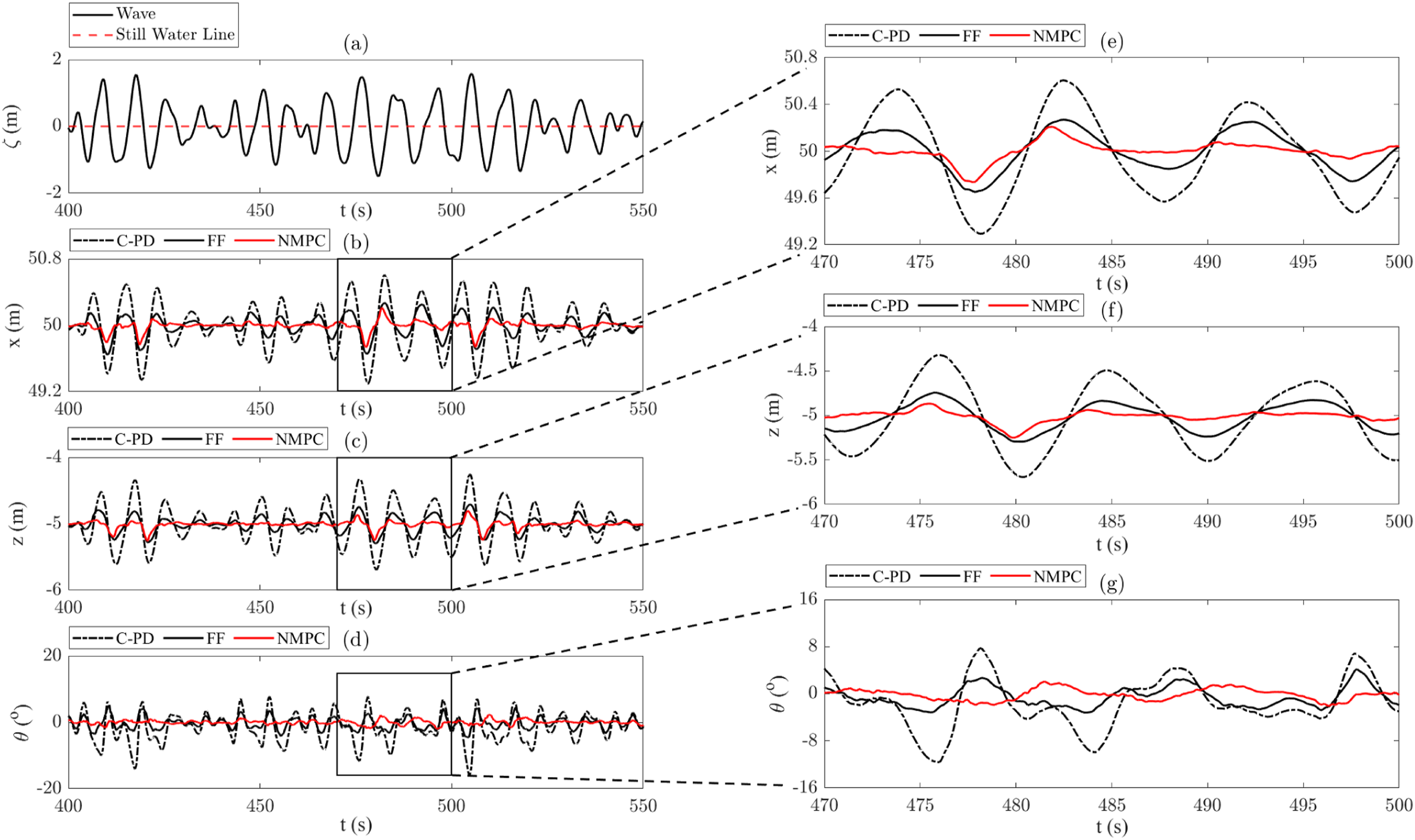
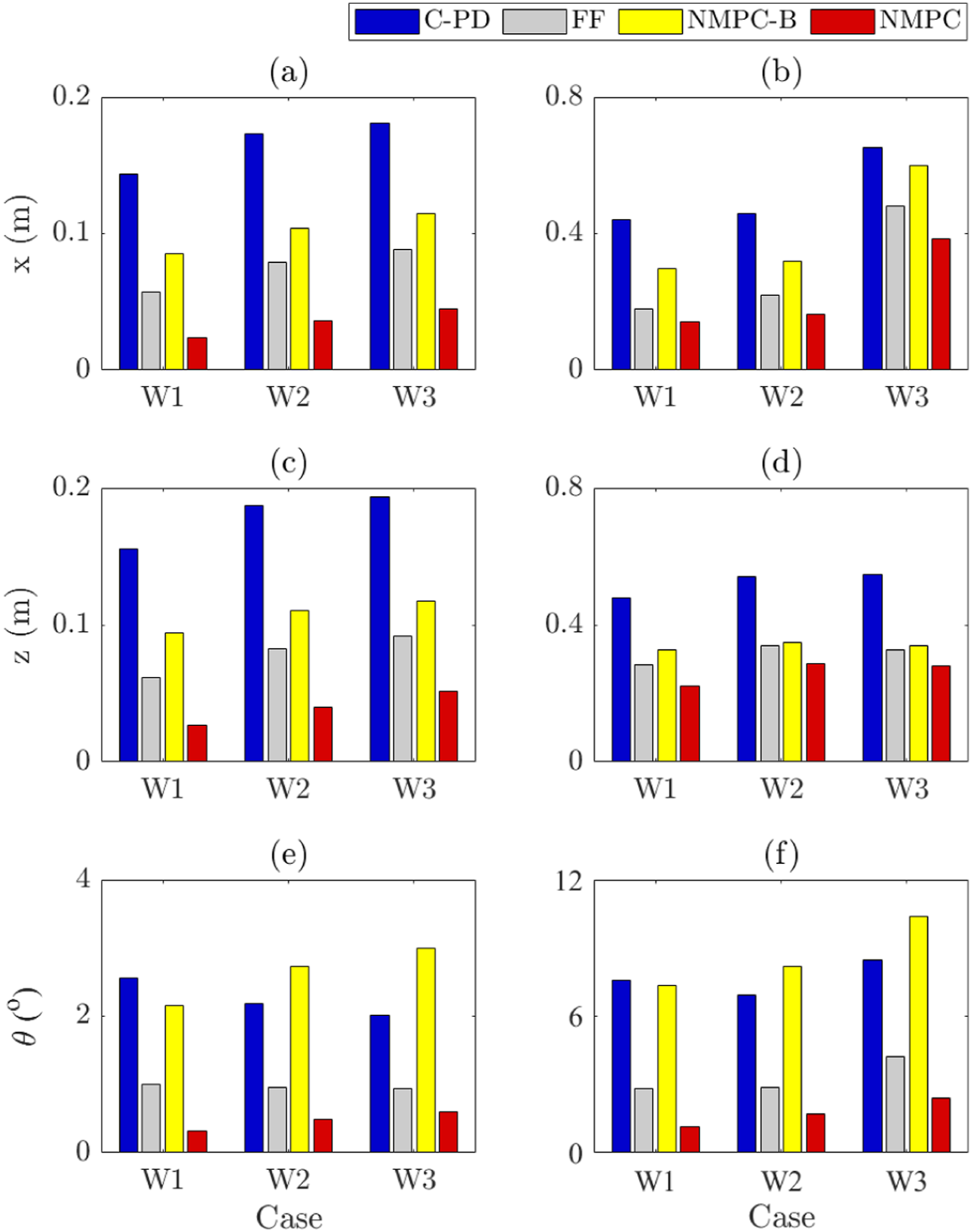
As anticipated, the NMPC method produces the lowest values for both RMSE and maximum error, however it was noted that the disparity in maximum error was much lower with some instances returning only
Interestingly, the NMPC-B struggled to handle pitch disturbances and was even outperformed by the C-PD strategy. It is postulated that this arises due to the NMPC optimising control actions whilst accounting for restoring forces in the vehicle dynamics, thus less aggressive action is commanded without the knowledge that further impending disturbances are on the horizon. In contrast, the C-PD and FF methods are simply taking the most aggressive action (relative to the controller tuning) in order to regulate the state, irrespective of vehicle dynamics. Similarly, the coupling which exists between the surge and pitch likely contributes to greater pitch displacement, with the NMPC-B strategy requiring more aggressive corrective actions from greater displacements, thus negatively impacting the pitch as a result. A further interesting observation was that the pitch displacement remained low even when using the C-PD method, with a maximum value of 8.47 o recorded. The vehicle is naturally restoring at θ = 0 o , so the control required to minimise displacement can be less aggressive. The advantage of this is the potential to reduce the computational overhead of the control by only applying a predictive method to the lateral motions, using a typical feedback controller specifically for the pitch plane to reduce the angular displacement sufficiently. This would allow quicker convergence during the optimisation stage and thus assist with applicability to real-time applications.
Finally, Figure 10 displays a violin plot of each test case. This shows the distribution of the data by using a relative width proportional to the frequency of data points, therefore represents the frequency that the vehicle undergoes different positional errors. From this, the ability of the NMPC to constrain the vehicle motion to remain largely within a narrow band of positional error is clear, owing to the shorter and wider plots in all cases and all DoF. Particularly for the surge and heave, the variation in positional error is reduced significantly, in conjunction with the maximum error as previously mentioned. Even when adopting the FF strategy, the frequency of data points recorded in the vicinity of the reference position is clearly apparent, demonstrating that the predicted disturbances are being mitigated effectively. Violin plot highlighting the frequency density of positional error with respect to each wave case and control strategy.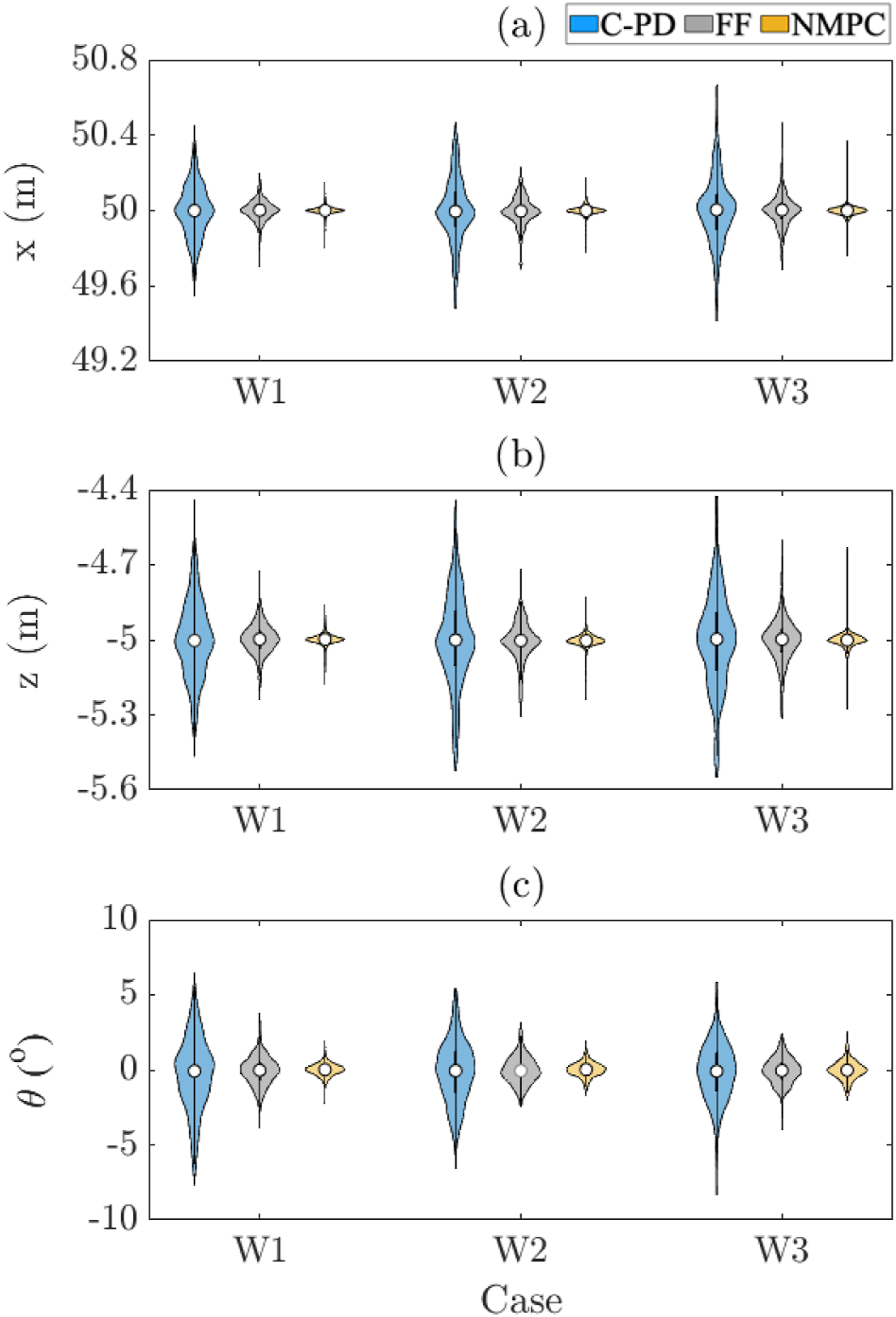
5.5. Sensitivity to noise
The effectiveness of predictive disturbance rejection is largely postulated on the accuracy of the wave disturbance preview. Any source of noise in the wave estimation, either deriving from inaccurate sensor readings at the measurement site or the occurrence of interference at the prediction site will intuitively affect the performance of the controller. To address the degree of robustness of the proposed methodology, we test the control performance under various degree of signal-to-noise ratio (SNR) on the output parameters of the wave predictor. Gaussian noise was directly injected to the output amplitude and phase of the DSWP inferred spectral components, simulating the conditions where predicted and encountered wave disturbances differ. The cases covered in this analysis involved SNRs of 5, 10 and 15. Figure 11 demonstrates how these levels of SNR affect the interpreted waveform by the controller against the wave experienced by the vehicle. Similarly, the effect of SNR levels on the predicted wave loading experienced by the vehicle compared to those actually encountered is shown in Figure 12. Spectral noise influence on the real versus interpreted wave. Ground truth refers to the wave (case W3) experienced by the vehicle, where-as the other displayed waves are what the controller interprets when including spectral noise. Temporal segment of the estimated loads during the station keeping simulation (b–d) subject to the wave profile shown in (a) and the associated enlargement (e–g), showing the evolution for case W2 with SNR10 of spectral noise, showing how the estimated loads vary with added uncertainty.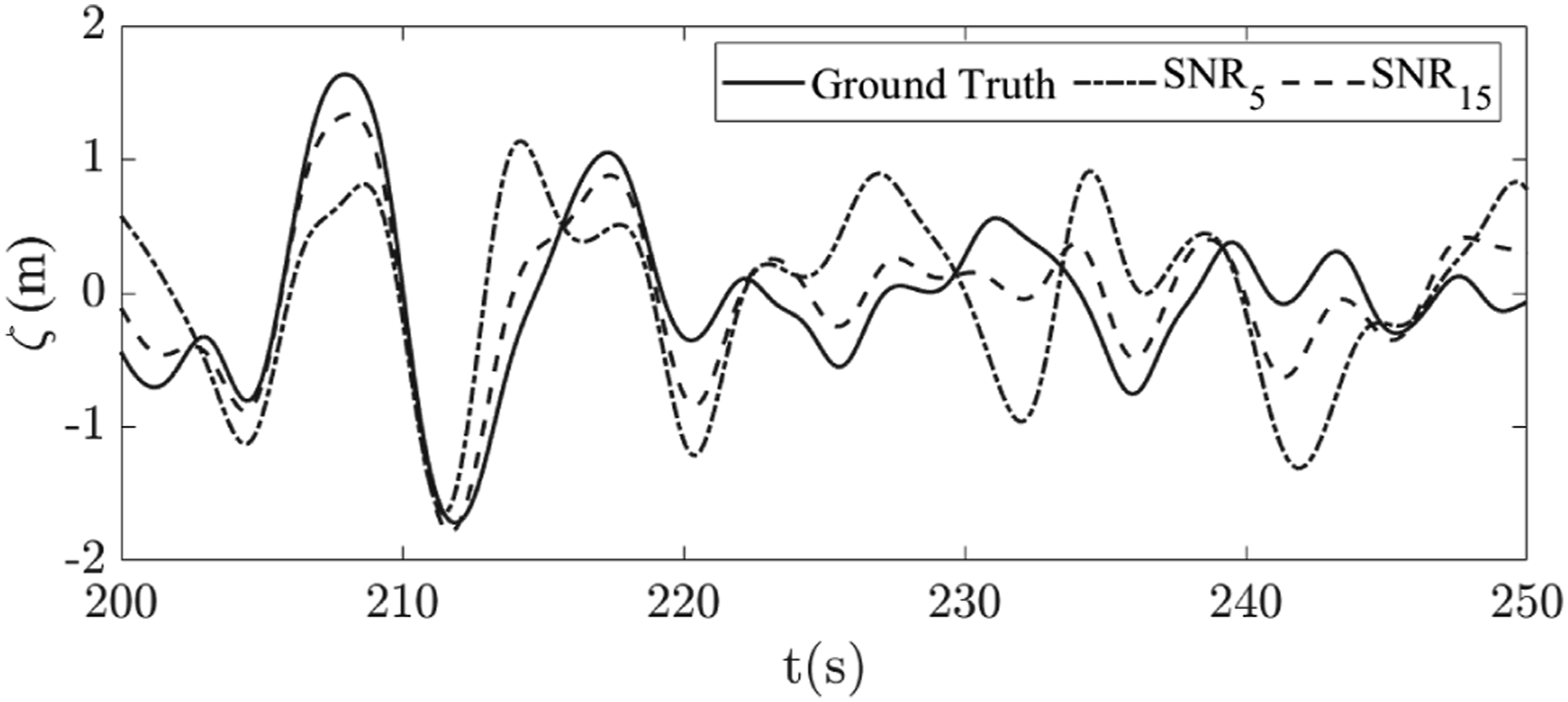
Station keeping performance under the three levels of SNR are shown in Figure 13, respectively, for the FF and NMPC controllers, also depicting the NMPC-B results to act as a reference. For almost all cases the NMPC outperforms the FF, with the only exception being the pitch control subject to large spectral noise, cases W2 and W3 in Figure 13(g). This is likely due to the fact the vehicle pitch is easily influenced by control actions, thus is more susceptible to unwanted motions if the predictions are not reasonably accurate. This being said, the pitch RMSE never exceeds 2
o
and so this difference is irrelevant when considering the broader goal. In the surge and heave DoF, a mean reduction across all cases of RMSE error for each DoF and sea state considered when different levels of spectral noise are considered, showing results for (a, d, g) SNR5, (b, e, h) SNR10 and (c, f, i) SNR15 and the comparison between the FF and NMPC alongside the NMPC-B providing a baseline reference.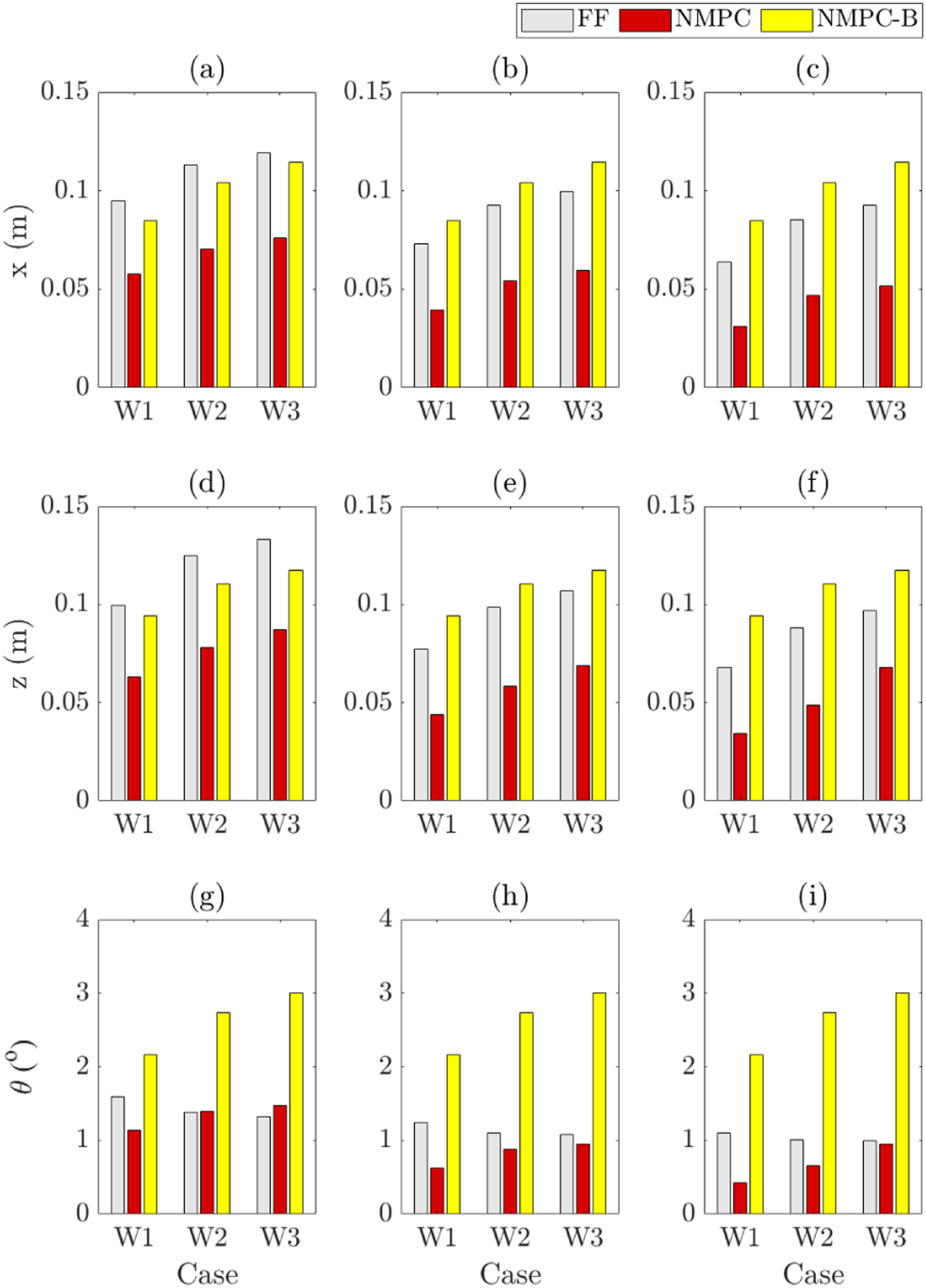
With reference to the cases presented in Section 5.4, the largest increase in RMSE when considering a non-ideal prediction was

Power consumed during the station keeping mission for each wave case and control strategy when the spectral components are perturbed by varying levels of noise. As the C-PD controller does not use the disturbance preview this only features in the SNR0 case.
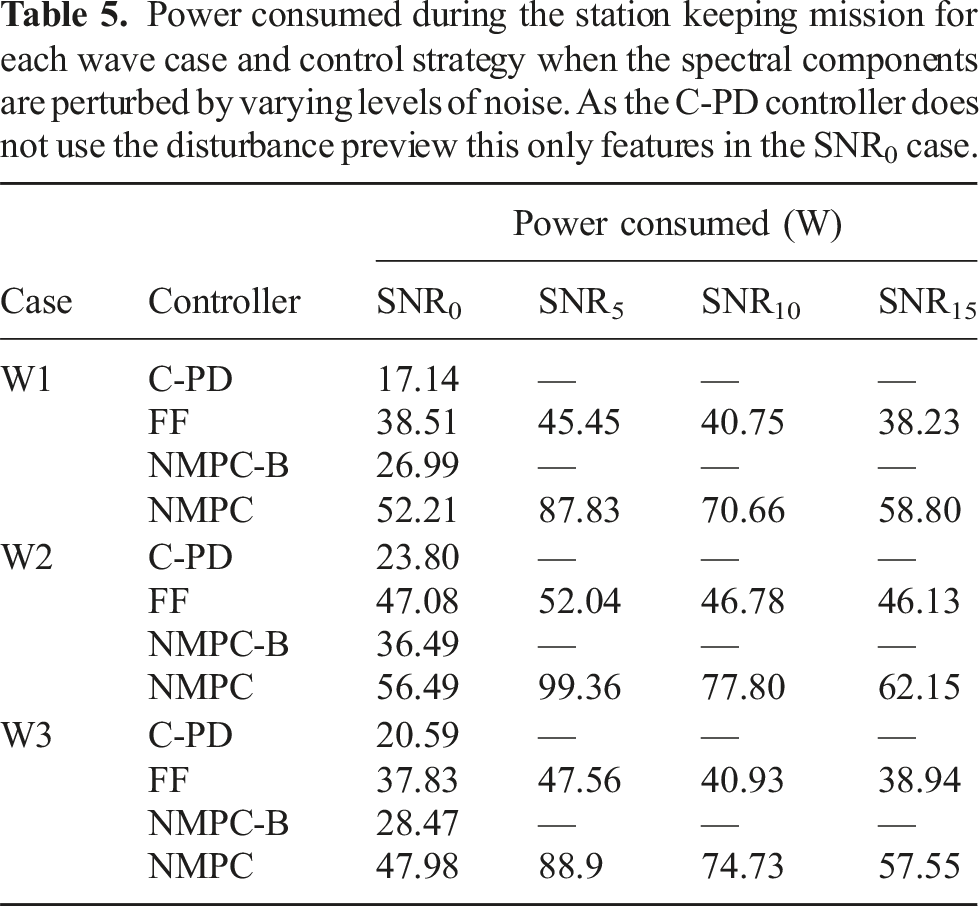
Considering the case SNR0 where the uncertainty considered is purely attributed to sensors (state and wave elevation), the relative increase in performance surpassed the relative increase in power consumption for all cases. A mean increase of
5.6. Sensitivity to communications delay
A key factor in deploying this control methodology is establishing a communication network between the wave buoy and the vehicle to pass the information pertaining to oncoming wave disturbances. As alluded to in Section 1, this can be performed two ways: either by (1) transmitting this data through air over a wireless link from the buoy to a base station, before relaying this to the vehicle via a tether, or (2) directly to the vehicle through water over a wireless link, meaning the vehicle can operate untethered. Using method (1) has the major advantage of very little latency, seen as wireless communications in air is an extremely well established field and a wired connection to the vehicle (over ethernet for the BlueROV2) means latency will be minimal. The drawback is that the vehicle is restricted by the length of the tether, so ultimately this limits the operational range from the base station. Alternatively, method (2) removes this restriction by operating untethered, but incurs the well-known limitation of wireless underwater communications which are often slow and suffer from increased attenuation and bandwidth limitations. It is therefore critical that these effects are analysed to demonstrate this control methodology can be implemented with confidence in a real environment.
Firstly, consider that the measured wave-height record (ζ
M
) is analysed at the wave-buoy and the data to be transmitted are sets of spectral parameters, (A, ω, ϵ). For the wave cases analysed in this work, these vary from 80 to 100 sets of parameters after thresholding. If each value of (A, ω, ϵ) is considered to be of data-type 32-bit float (8 bytes) and we analyse the 100 components case with three parameters per component, then the amount of data requiring transmission would be 9600 bits. To calculate the full transmission time, consideration of the transmission distance along with propagation speed need to be accounted for, as well as inclusion of some overheads introduced by the transmission protocol; these overheads usually amount to
For wireless transmission in air, a standard offshore WiFi network can range over hundreds of meters and operates in the Mbps range at minimum (Chen et al., 2021). Considering the 50m transmission distance specified throughout our previous analysis, this implies a maximum transmission time of
Wireless transmission in water is far slower than air, stemming from the density of sea water, which implies that much lower frequencies are required to reduce signal attenuation and improve range. However, commercially available underwater modems can still transmit at rates of 30kbps for up to 1000m (NOAA, Revised 2022); this would imply a transmission time for the data alone of
However, there is optimism that underwater communications are vastly improving, as evidenced by recent demonstration of successful underwater data transmission at 1Mbps over a 300m range in shallow waters (NTT, 2022). This speed of transmission relates to a delay of only
Regardless of the communication strategy, transmission from the measurement point to the vehicle is likely to expose the disturbance preview to a temporal delay. This is reflected in the disturbance prediction potentially being misaligned with the actual disturbance. To address this, the following analysis delves into the effect of time delays when estimating the wave-induced disturbances, investigating how the control performance of the FF and NMPC methods are affected by varying degree of delay. In these tests, the disturbance estimation is considered to be accurate, that is, SNR=0, but the controller predicts the disturbance to occur after it has arrived at the vehicle location (see Figure 14). Constant time delays of 0.25s and 0.5s are tested, along with a case where the time delay is varied randomly (uniform distribution) during the simulation between 0 and 1s. This additional case aims to simulate communication instabilities that may be caused by changing environmental conditions. As this final case deals with a randomly generated delay at each time-step, the results from these tests were averaged over three repetitions. These test cases were selected on the basis that it is already commercially viable to achieve stable communications with time delays of Time delay influence on the real versus interpreted wave. t
d
= 0s refers to the wave (case W3) experienced by the vehicle, whereas the other displayed waves are what the controller interprets when including a time delay.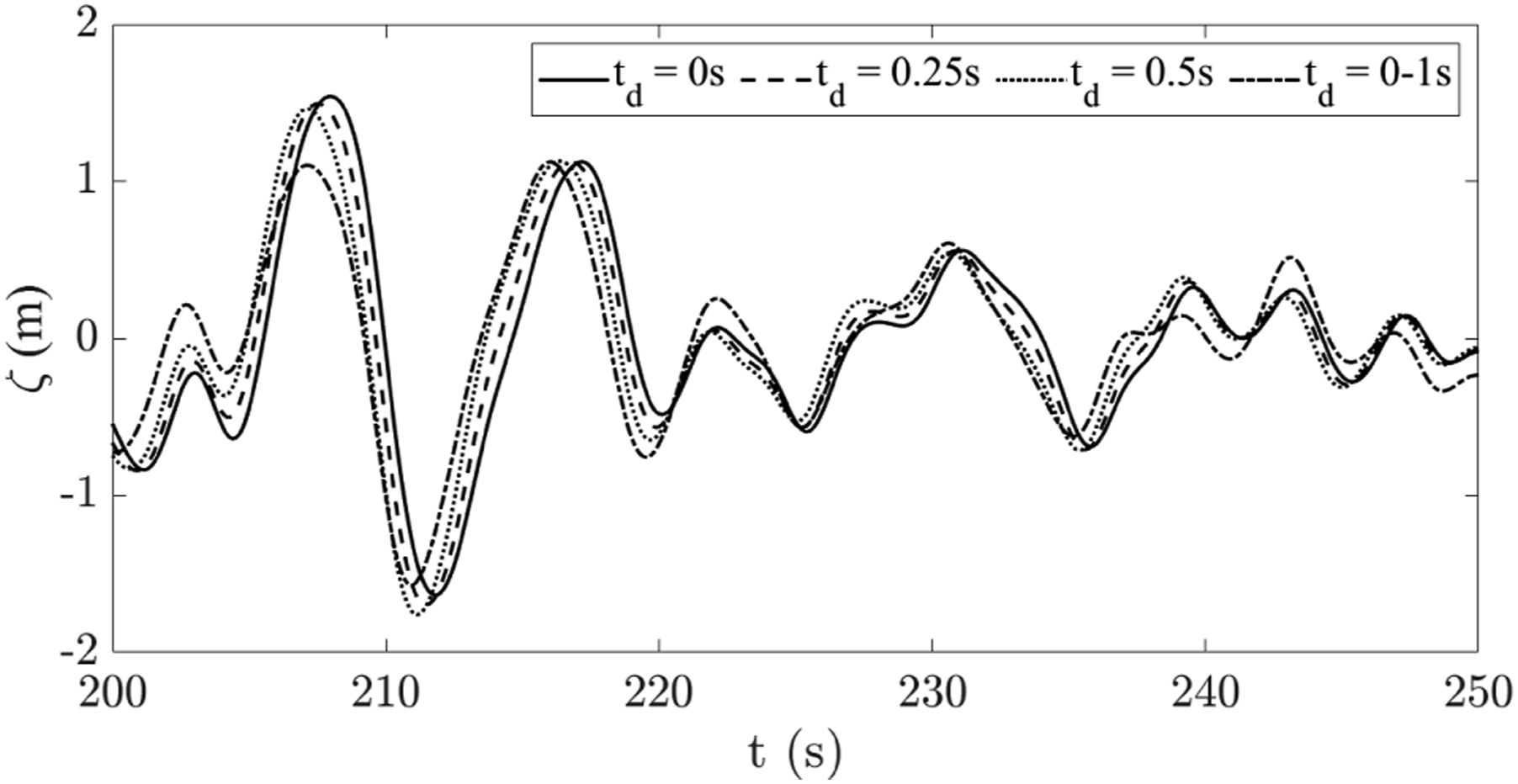
As can be seen in Figure 15 and comparing to Figure 9, unsurprisingly there is an increase in RMSE for all degrees of freedom. However, even with this increase, the NMPC inclusive of disturbance time delay still outperforms the blind NMPC, supporting the claims in the previous section that disturbances with some level on inaccuracies can still be exploited to improve control performance. For all cases, a mean increase in RMSE of RMSE error for each DoF and sea state considered when different levels of spectral noise are considered, showing results for (a, d, g) t
d
= 0.25s, (b, e, h) t
d
= 0.5s, and (c, f, i) t
d
= [0, …, 1]s and the comparison between the FF and NMPC alongside the NMPC-B providing a baseline reference.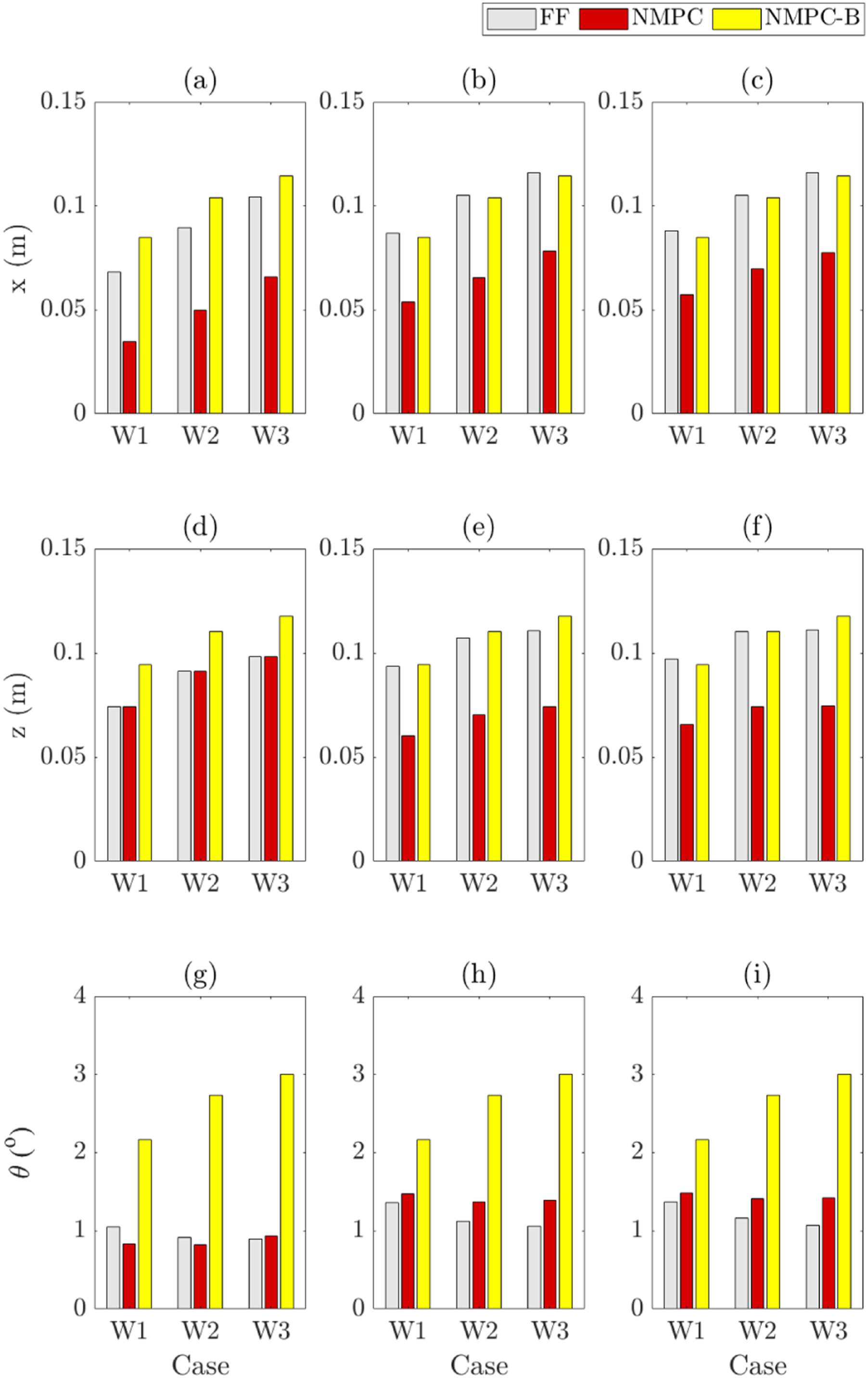
These results show a remarkable level of robustness of the controller to realistic communication delays. In particular, a dependency on the characteristic time scale of the wave is observed, confirming that longer wavelengths exhibit less degradation on control performance caused by time delays. This is motivated by longer wavelengths being associated with shallower gradients in the magnitude of the temporal disturbance. The fact that, in real-world sea climates, the wave period is typically much longer then the time-delay suggests that the degradation in control performance for the strategy proposed should remain consistent with that caused by a noisy signal, Section 5.5.
6. Conclusions
In this article, a method for the predictive disturbance mitigation of ocean waves has been proposed for underwater vehicles, utilising real-time, recursive preview information of future disturbances derived through the inclusion of a wave predictor. With regards to the wave predictor, an experimental study focusing on short-term short-distance predictions returned a maximum RMSE of 0.045m over a 2 s wave prediction, validating applicability for use within a predictive control architecture which can be confidently extended to larger distances and prediction intervals. Upon embedding the wave predictor within two different predictive control methods analysed (FF and NMPC), both were shown to effectively reduce the positional error of the vehicle, with the latter showing a mean improvement of 52% in comparison to the former due to the inclusion of an optimisation of future control actions. Performance improvements were demonstrated in the presence of various sources of noise and uncertainty, including time delays in the disturbance prediction, highlighting the robustness of the system to any mismatch between the predicted disturbances and those encountered by the vehicle. Ultimately, these results provide evidence that predictive control, once supported by a robust disturbance predictor, can indeed represent a solution to the current limitations associated with the employment of autonomous vehicles in hazardous ocean climates, enabling more complex navigation (Walker and Giorgio-Serchi, 2023) and manipulation (Walker et al., 2024) tasks and facilitating their uptake in a broader range of offshore operations.
Supplemental Material
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the EPSRC under grant No. EP/R026173/1 and grant No. EP/R513209/1.
Supplemental Material
Supplemental material for this article is available online.
Appendix
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.