
Abstract
The performance of particle damper is strongly nonlinear, and the energy dissipation is derived from a combination of mechanisms including plastic collisions and friction between the particles and the walls and between the particles themselves. An optimized support vector regression model is built to predict the damping ratio of cantilever beam with particle damper. Then, the optimal parameters are adopted to construct the support vector regression models. In addition, genetic algorithm is used to select the optimal variables so as to improve the predictive ability of the models. Cross validation combined with support vector regression is used in this research and is compared with the genetic algorithm-support vector regression method. Genetic algorithm-support vector regression as research object to compare with the combination of cross validation and support vector regression. The experimental results demonstrate that the proposed genetic algorithm-support vector regression model provides better prediction capability. Therefore, the genetic algorithm-support vector regression model is proven to be an effective approach to predict the damping ratio of cantilever beam with particle damper.
Introduction
A particle damper is composed of a volume of granular particles enclosed within a hollow cavity. Particles may be metallic, nonmetallic, or a mixture of various materials. A particle damper can be introduced without changing the shape of the structure and the addition of mass, and it may be applied in extreme temperature environments where most conventional dampers would fail.1,2 The damping is obtained by filling particles within the holes of the primary vibrating structure. The performances of damping are strongly dependent on particle material, particle size, fill ratio, location of particle dampers, and so on. In particle damper, the vibration energy is dissipated by friction and collision between surfaces of particles and between surfaces of particles and cavity walls.3,4 The process of friction and collision results in a strong nonlinearity and a great challenge for numerical simulation.5,6
In the last decade, a support vector regression (SVR) which is a relatively new tool from the artificial intelligence field is known as the classification and regression technique, which has gained the attention in hydrology to predict the soil moisture, rainfall runoff, and the lake water level. 7 SVR is also a nonlinear technique that is based on the statistical learning theory and structural risk minimization but has the capability of dealing with linear and nonlinear multivariate calibration. SVR has been successfully applied to a number of applications such as handwriting recognition, particle identification, digital images identification, text categorization, bioinformatics, function approximation, and regression and database marketing. Although SVR has become more widely employed to forecast time-series data and to reconstruct dynamically chaotic systems, a highly effective model can only be built after the parameters of SVR are carefully determined. The quality of SVR models depends on a proper setting of SVR model parameters; the main issue for SVR regression practitioners is how to set these parameters in their applications. The parameters have usually been determined by a trial-and-error process which is less efficient and not easy to obtain an optimum set of parameters promising the performance of the model.8,9 The usage of these methods must create many SVR models and also take much time to compute the training error. In other words, so far no systemic and architectural methods are available to determine these parameters.
In this work, genetic algorithm (GA) is used to optimize the model parameters, and so the generalization ability and forecasting accuracy are improved. Based on the Darwinian principle of “survival of the fittest,” GA can obtain the optimal solution after a series of iterative computations. 10 The relationship between the physical and dynamic properties is highly nonlinear, and consequently a GA-SVR can be a suitable alternative to model the underlying dynamic properties.11,12 In the model, GA is employed to determine training parameters of SVR, and damping ratio of the SVR forecasting model with good forecasting ability is obtained.
This research focuses on the study of the nonlinear dynamics theory and the damping characteristics of forecasting methods for particle damper system. The aim of this paper is to develop a new expression in order to predict the modal damping ratio of structure with particle damper and also to broaden the application area of particle damping technique for the control of vibration and noise. The damping ratio data of cantilever beam with particle damper is used to test the accuracy of the proposed model. The GA was employed to determine the optimal parameters of SVR, which were then applied to construct the SVR model. Then, the damping ratio of the cantilever beams was predicted. The experimental results show that the GA-SVR model is considered as a promising alternative method for forecasting the damping ratio of the cantilever beam with particle damper.
GA-SVR model
SVR
The SVR formulation follows the principle of structural risk minimization, and it is to minimize an upper bound of the generalization error rather than the prediction error on the training set (the principle of empirical risk minimization). This equips the SVR with a greater potential to generalize the input–output relationship learnt during its training phase for making good predictions for new input data. The SVR maps the input data x into a high-dimensional feature space F by nonlinear mapping, to yield and solve a linear regression problem in this feature space (see Figure 1).
Mapping input space x into high-dimensional feature space.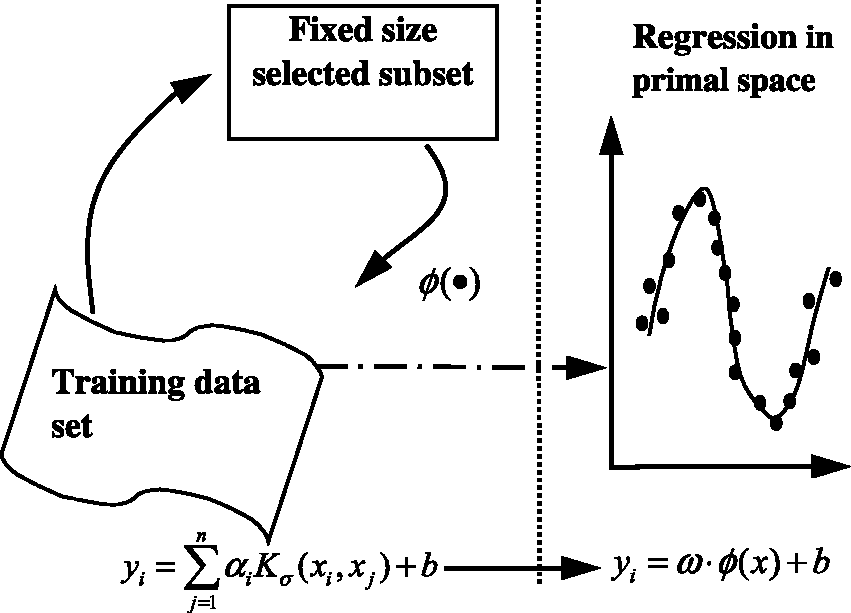
In a typical regression problem, consider a training set


SVR performs linear regression in the high-dimensional feature space by ɛ-insensitive loss. At the same time, to prevent overfitting and thereby improve the generalization capability, follows with the regularized functional involving the summation of the empirical risk and a complexity term


The two positive slack variables ξ and ξ* represent the distance from actual values to the corresponding boundary values of the ɛ-tube. A dual problem can then be derived by using the optimization method to maximize the function

Subject to
Finally, by introducing Lagrange multipliers and exploiting the optimality constraints, the decision function given by equation (1) has the following explicit form

To solve the nonlinear regression problem, the solution can be found by mapping the original problems to linear ones in a characteristic space of high dimension by a kernel function, which is denoted as
Hence, the nonlinear regression function is

According to equation (6), the support vectors are all equal to zero, which also are the only element in determining the decision function as the coefficient
GA
GA is stochastic search techniques that can search large and complicated spaces by using the ideas of natural genetics and the evolutionary principle. A GA works with a population of individual strings (chromosomes), and each one represents a possible solution to a given problem. Each chromosome is assigned a fitness value according to the result of the fitness function. Highly fit chromosomes are given more opportunities to reproduce and the offspring share features from their parents. The GA is a simple but powerful tool for finding the global solution to an optimization problem. It is suitable for large-scale and complex nonlinear optimization problems, and it has the tendency to find the global optimal solution.
The procedure of a GA can be summarized in the following steps:
Choose a randomly generated population. Calculate the fitness of each chromosome in the population. Create the offspring by genetic operators: selection, crossover, and mutation. Judge the stopping criteria. If the stopping criteria are met, the GA will be stopped. Otherwise, repeat steps 2–4 using the generated offspring as the new starting population.
There are two types of coding method for GA, which are real and binary-coded GA. However, binary coding has some disadvantages, such as needing more memory, not being so flexible, and requiring a large amount of decode computation, so it is difficult to solve large-scale multiparameter optimization problems by using a binary coding GA in a small-memory computer. In contrast to the binary GA, the real value GA uses a real value as a parameter of the chromosomes in the population without the coding and encoding process prior to calculating the fitness value.
Thus, the real value GA is straightforward, fast, and efficient. GA has been used in a number of applications in engineering and social science.
GA-SVR optimization procedure
The use of SVR is affected in academic research and industrial applications, because the parameters must be defined appropriately. To construct the SVR model efficiently, SVR’s parameters must be set carefully. The inappropriate parameters in SVR lead to overfitting. Here the values of the three parameters, C, σ, and ɛ, are directly coded in the chromosomes with real value data. Figure 2 shows the framework of optimizing the SVR parameters with a real value GA, which is summarized as follows.
Schematic for SVR algorithm implementation. SVR: support vector regression.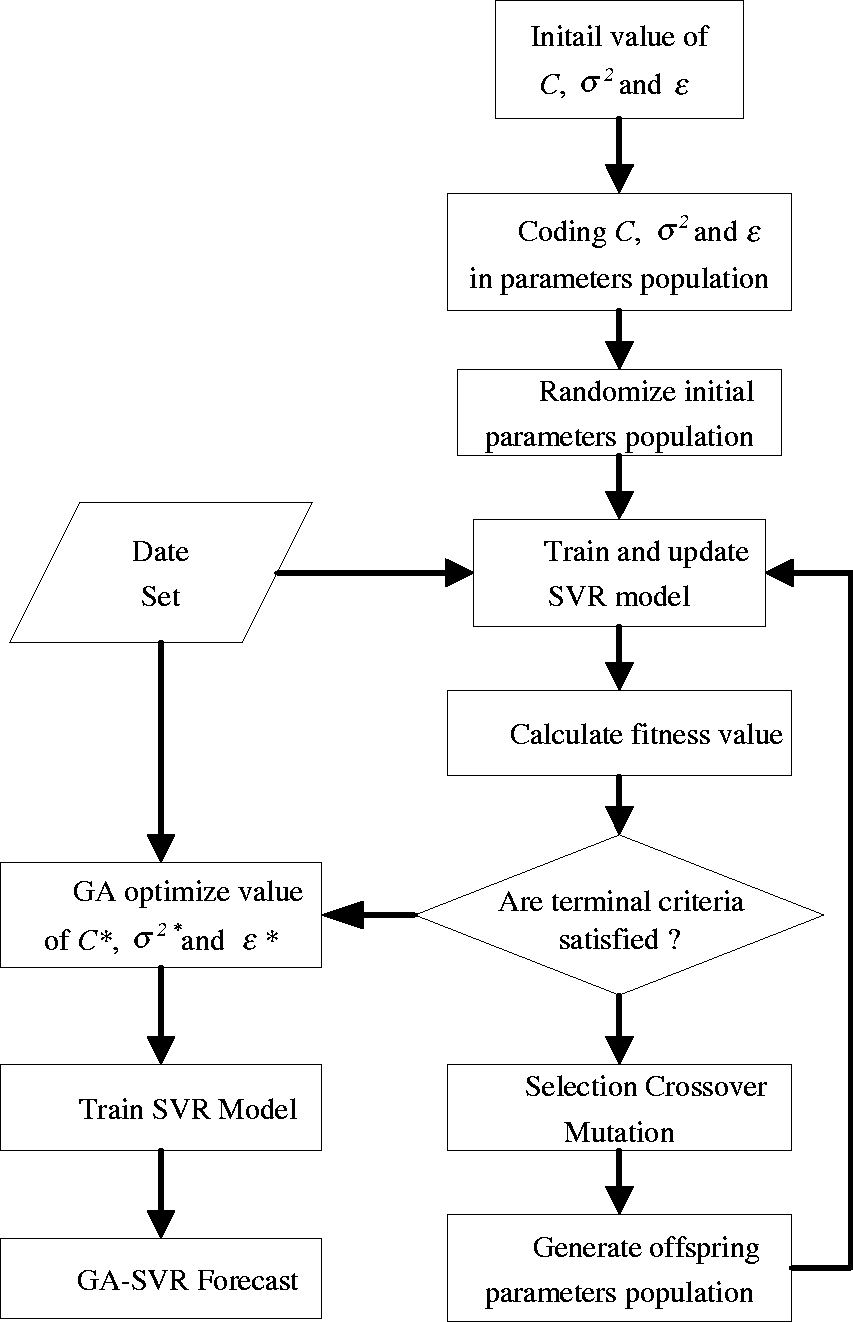

Here, aj and pj are the actual value and the predicted values, respectively.
The converged solution is mostly affected by the setting value of parameter. The choices of other parameters such as the mutation probability and population size are based on numerous experiments as those values provide the smallest RMSECV or RSEPOS on the training data set.
The damping ratio of cantilever beam with particle damper forecasting model
The damping ratio of cantilever beam with particle damper forecasting based on GA-SVR is shown in Figure 3. The forecasting system is composed of data acquisition, forecasting model, data management, and testing results. In the system, the training sample sets are constructed based on the training data, then the training sample sets are sent into the GA-SVR.
The structure of forecasting model of damping ratio based on GA-SVR. GA-SVR: genetic algorithm-support vector regression.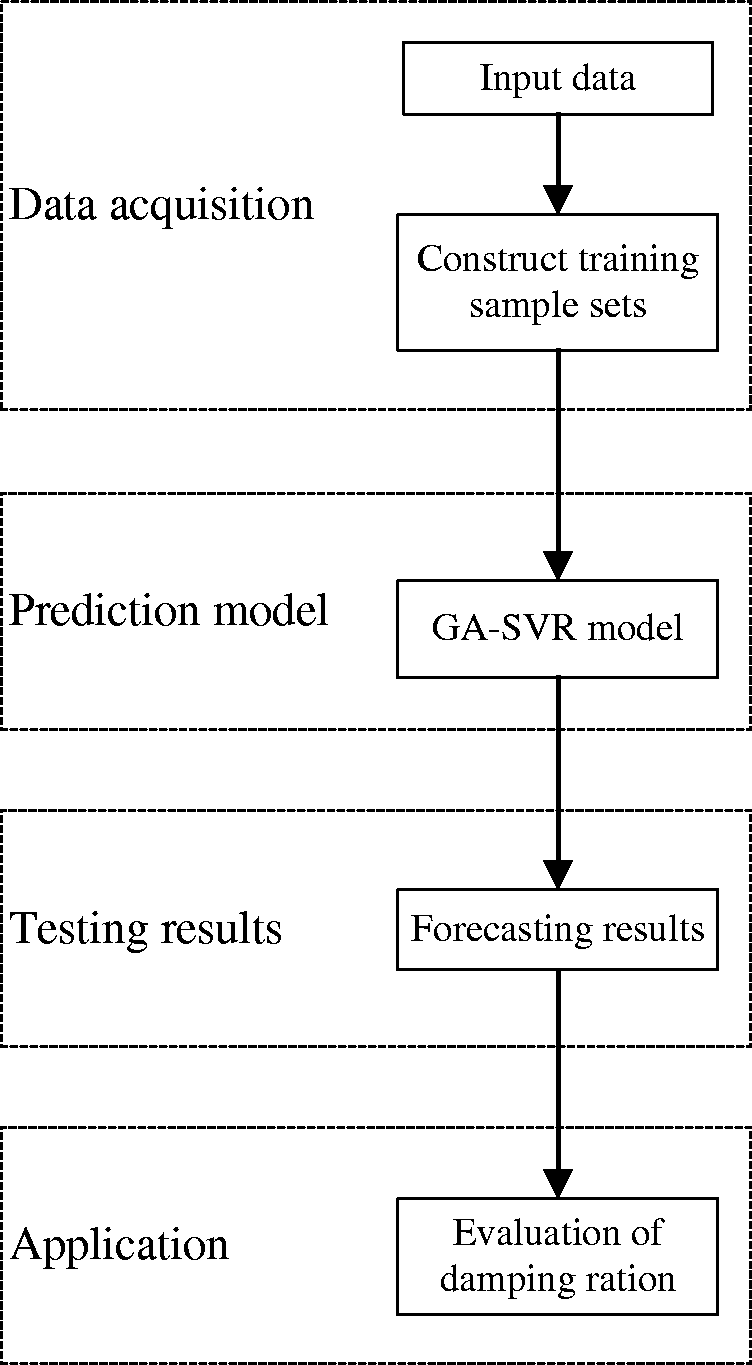
Data normalization
In order to eliminate dimension differences, the following formula was used for data standardization and normalization, and then all input and output data were standardized and normalized to the range [0, 1]

Here, x denotes the original data point, and xmin and xmax are the minimum and maximum values in the data set, respectively.
Experiment test for damping ratio of cantilever beam with particle damper
In order to demonstrate the particle damper model, testing and analysis of a cantilevered beam were performed. The beam is undamped and with particle damper attached. Above particle damper model is used in the process of predicting the behavior of the beam under various conditions. Figure 4 has shown the experimental apparatus used in this study. The cantilever beam is specified with a mass density of 7800 kg/m3, an elastic modulus of 175 GPa, and Poisson’s ratio of 0.3. The dimension of cantilever beam is length 250 mm, width 60 mm, and thickness 5 mm. The accelerations are measured at the beam tip. In this test, all of the particle damper cavities are 3.5 mm in diameter and 50 mm in length. Test is performed on particle dampers containing steel spheres of 2 mm diameter. The beam was tested for five different mass fill ratios of 0, 30, 50, 70, and 90%, respectively. The damping characteristics of vibration structure with particle damper are influenced by particle size, particle density, particle fill rates, frequency and amplitude of vibration structure, damper location, and shape and dimensions of the cavity.
Particle damping cantilever beam test system.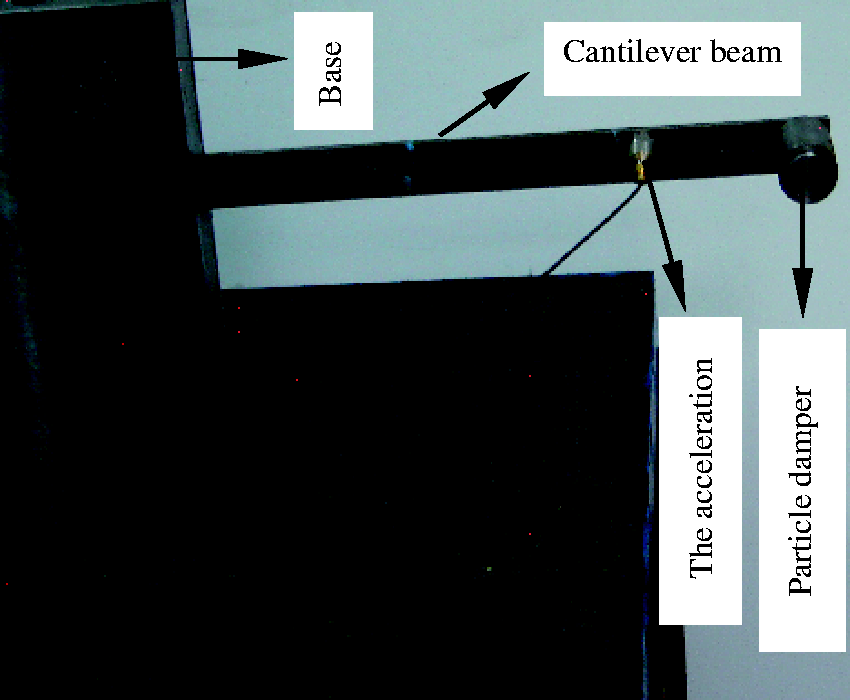
Prediction model of damping ratio
The damping characteristics of vibration structure prediction model are expressed as
The model structure. Damping ratio prediction by GA-SVR in the training period. GA-SVR: genetic algorithm-support vector regression.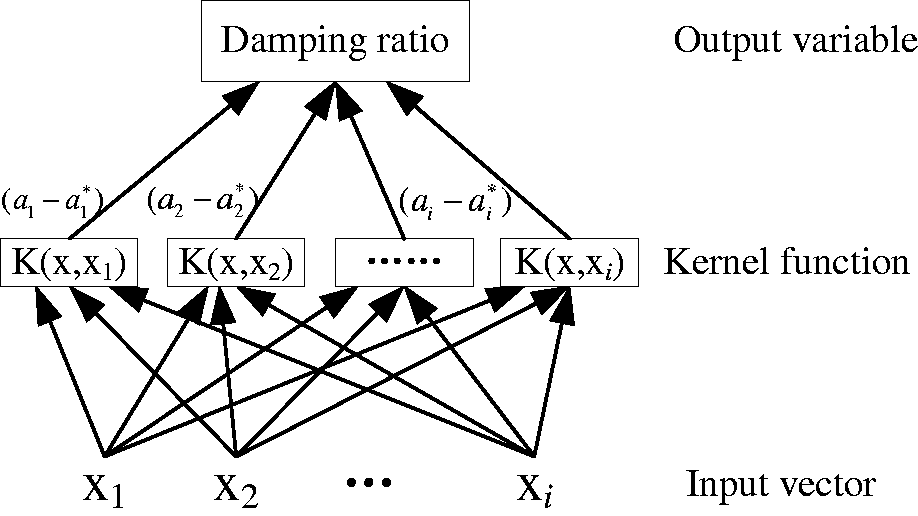
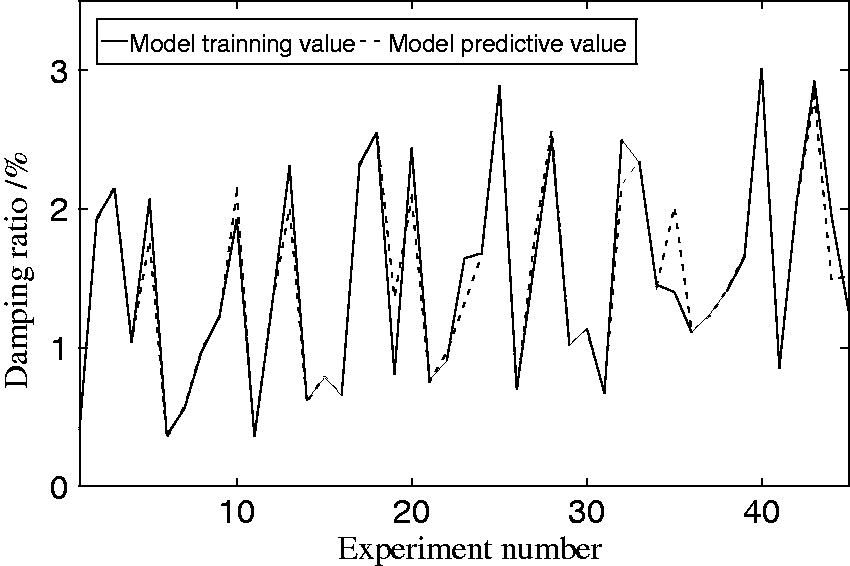

Prediction result of damping ratio
During the experiments, the damping ratio is selected as the targets for the prediction of cantilever beam with particle damper prediction. In the aquaculture damping ratio forecasting based on the GA-SVR model, adopt the current monitoring particle damper value’s particle size, particle density, particle fill rates, amplitude of vibration beam, damper location, and shape and dimensions of the cavity values, respectively, then the subsequent monitoring value’s damping ratio is compared and analyzed.
Two multivariate models are developed to predict the damping ratio of cantilever beam with particle damper, respectively. The 90 samples are divided into a calibration set and a prediction set randomly. The calibration set is formed by 50% of the total samples, and the prediction set is constituted by the remaining 45 samples. The property of interest is the proliferation rate. The two types of fingerprint analyses are based on the same calibration set and prediction set.
Training regression model accuracy comparison by several common parameter optimization algorithm.

CV-SVR: cross validation-support vector regression; GA-SVR: genetic algorithm-support vector regression.
Table 1 represents the results of the multivariate methods for the simulated data set. The two models have similar predicted values, which are 97.65 and 96.16% for GA-SVR and CV-SVR, respectively. However, according to the RMSE, the GA-SVR has the better results (RMSE = 0.00517).
The better model is selected on the basis of fitness value, and then the variable selections are used to build the calibration models. For the GA-SVR models, the parameters are optimized before each step of GA program.
The historical damping ratio data of cantilever beam with particle damper are used as our experimental data.
13
The first, third, fifth, 89th damping ratio data of 45 samples are used as training data and applied to train the forecasting model, and the second, fourth, sixth,…90th of 45 damping ratio data samples are used as testing data and applied to test the performance of the proposed model. The three parameters, C, ɛ, and σ, are optimized, and then the GA-SVR model is developed based on the same parameters during the optimization process. In response to the GA-SVR forecasting model, received SVR parameters C = 1.232, ɛ = 0.00041, and σ = 0.3042 in MATLAB7 simulation training and testing. The prediction results of the damping ratio are shown in Figure 7.
Damping ratio prediction in the testing period.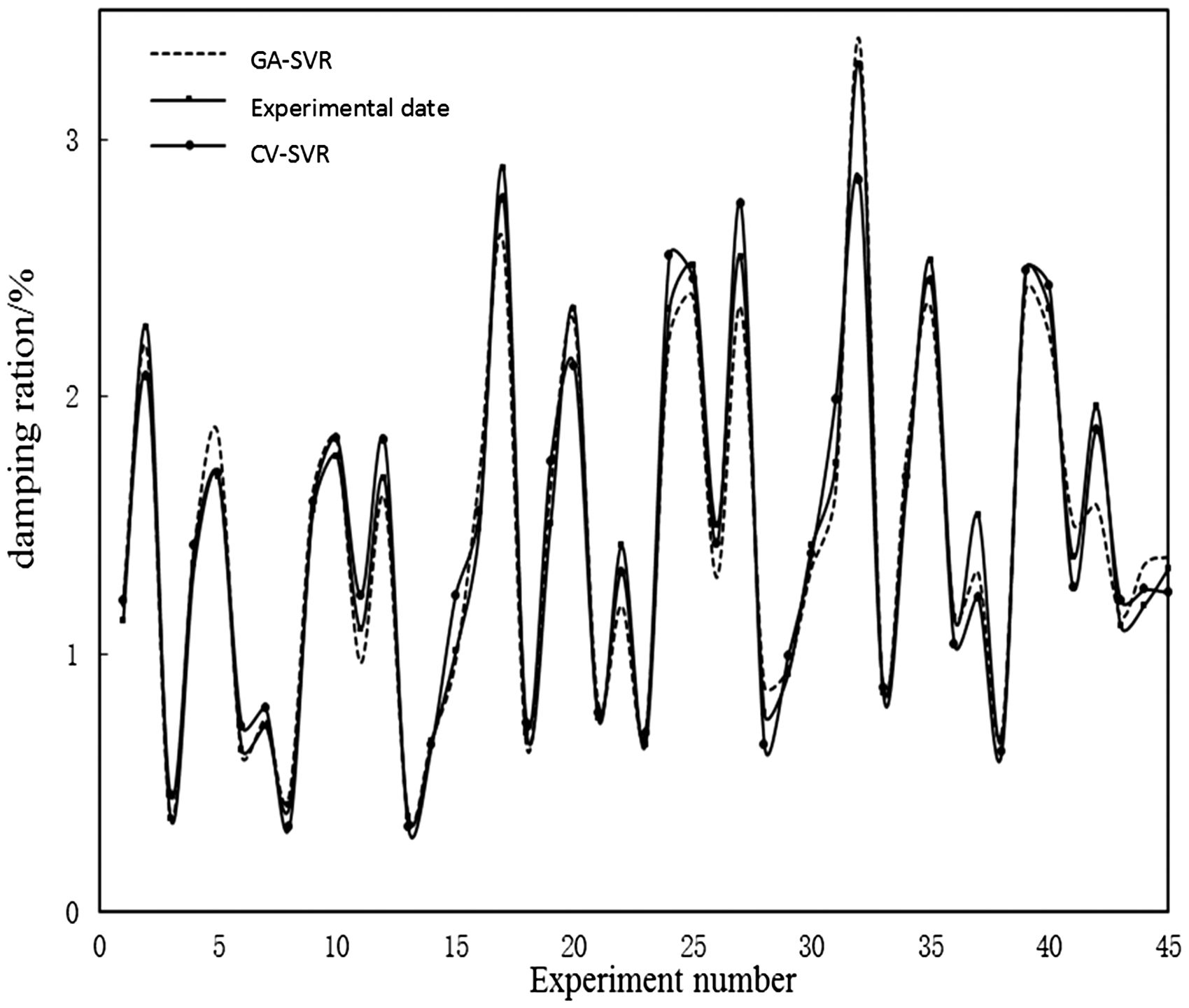
In this paper, the GA-SVR and CV-SVR are applied to predict the damping ratio of beam with the particle damper. The RMSE is used to evaluate the forecasting accuracy. The smaller the value of this error means the better the performance of forecasting model is. Figure 7 has shown the forecasting results of GA-SVR compared with CV-SVR. It is indicated that GA-SVR has more excellent performance than CV-SVR in forecasting of cantilever beam with particle damper. The results suggest that within the forecasting fields of systems reliability, the GA-SVR is typically a reliable forecasting tool which has a more precise forecasting capacity compared with CV-SVR model.
Generally, the GA-SVR forecasting model has excellent performance. This is because GA-SVR implements the principle of structural risk minimization in the place of experiential risk minimization, which gives it excellent generalization ability for small sample sizes. As the GA-SVR has no requirement in data series distribution, it also can be applied in the wake of changing disciplinarian of data. Thus, the prediction error of GA-SVR is also small when the data exhibit great fluctuation. Through the above study and the results, we can conclude that the GA-SVR algorithm is more suitable for the prediction of damping ratio compared with the CV-SVR method.
Conclusions
GA-SVR and CV-SVR are used to construct the damping ratio of cantilever beam with particle damper, respectively. After variable selections, there are some significant improvements in prediction accuracy of models. Table 1 gives the comparison among the results by using the two models based on predicted values RMSE. GA-SVR model gives the highest predicted values and lowest RMSE, which reveals the superiority of the GA-SVR to CV-SVR. The overall results indicate that GA-SVR is a useful method for multivariate calibration and also can be applied as an efficient method for the damping analysis of cantilever beam with particle damper.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work is sponsored by the National Science Foundation of China (11302088), the Natural Science Foundation of Jiangsu Province (BK2012278), and the Natural Science Foundation of the Jiangsu Higher Education Institutions (16KJD580002).