
Abstract
Active noise control (ANC) is based on the principle of superposition of waves. It means that an algorithm is used to tune a secondary source to make an anti-noise with equal amplitude but opposite phase with the primary source. In this paper, a wavelet function and network (WAVENET) approach is designed for ANC. The algorithm is used to train parameters of an anti-noise filter for omitting the undesired noise. FXLMS and NLMS are the conventional methods of ANC that need complex acoustic plant models and these necessities make the methods complex and inaccurate. In the WAVENET approach, this complexity can be accounted for. Numerical simulations for a WAVENET approach are presented to demonstrate the performance of the WAVENET approach scheme.
Introduction
The active noise control (ANC) system, which uses anti-noise signals to cancel undesired noise, has received considerable attention during the past decades. 1 In the recent years, improvements in electronics have enabled researchers to apply different algorithms for ANC. An alternative approach of noise reduction is passive noise control (PNC) which is mostly used for high frequency acoustic noise reduction. 1
It has been verified by many researchers that PNC can decrease high frequency noise more than the low frequency noise.2–5 However, in industrial applications, the power spectrum of the acoustic noise is in the low frequency band. Therefore, PNC methods will not be cost-effective in such applications. Moreover, PNC methods need bulky material in such applications and this constitutes another disadvantage of these methods.
In comparison with PNC method, ANC approach has the ability of reducing noise of low frequency.6–9 Another advantage of this approach is the decrease in the weight, volume and cost of the noise control system. 1
The first idea of employing a microphone and a loudspeaker for ANC is a patent of Paul Lueg in 1936. Due to lack of essential equipment in those years, the implementation of the idea was only realised in 1975.10,11 One of the essential necessities for implementation of the ANC system using conventional methods is identification of acoustic paths and transducers, because, designing the ANC system filter is based on the transfer function of the acoustic paths. One should have an accurate transfer function to generate anti-noise signal correctly.
Many researchers have applied the filtered-X algorithm in the ANC system because of its simplicity in computation and implementation. The filtered-X algorithm is an adaptive filter which uses the least mean square (LMS) algorithm to tune the weighting parameters. This adaptive algorithm is referred to as FXLMS. In contrast to PNC, this method can decrease the acoustic noises in low frequencies in an effective manner. This advantage of approach has allowed its realisation in different applications such as reduction of compressor noise, engine acoustic noise and fan noise. 12 Besides the advantages of this approach, there are some disadvantages. The approach is just applicable for ANC systems with simple acoustic paths and that nonlinearities of the system and the loudspeaker are not accounted for. One of the most important issues in FXLMS is the low convergence speed in adapting the parameters. Small step in the FXLMS algorithm causes the algorithm to have the low convergence speed. A small step is used to guarantee that the system remains stable, because, the big changes in the step can make the system unstable. 12
Because of these disadvantages, many researchers have tried to find new methods to overcome such difficulties. To overcome the nonlinearity property of the ANC system, neural network is applied to ANC systems, 13 because, neural networks are one of the most powerful structures to deal with nonlinear behaviours. On the other hand, neural networks have nonlinear properties and these properties help them to handle nonlinear processes.14–16 In Salmasi and Pourghassem’s 17 study, it is shown that neural networks can perform more effective than the adaptive filter in the presence of nonlinearities.
Fuzzy logic has extensively been applied in ANC systems in recent years. Most of these have used conventional methods such as finite impulse response (FIR) filters or proportional- derivative (PD) controllers with fuzzy logic to tune the parameters of the ANC system.1,18–20 These approaches are found to be complex.
WAVENET can benefit from the nonlinear properties of a neural network and proficiency of identification and prediction of wavelets. In this paper, a novel approach using WAVENET for ANC system is proposed. In comparison to other ANC approaches, it is easy to implement and has less complexity. The ease of implementation has led to its use in various applications with neural networks21–24 such as transportation noise control, appliances noise and industrial noises.
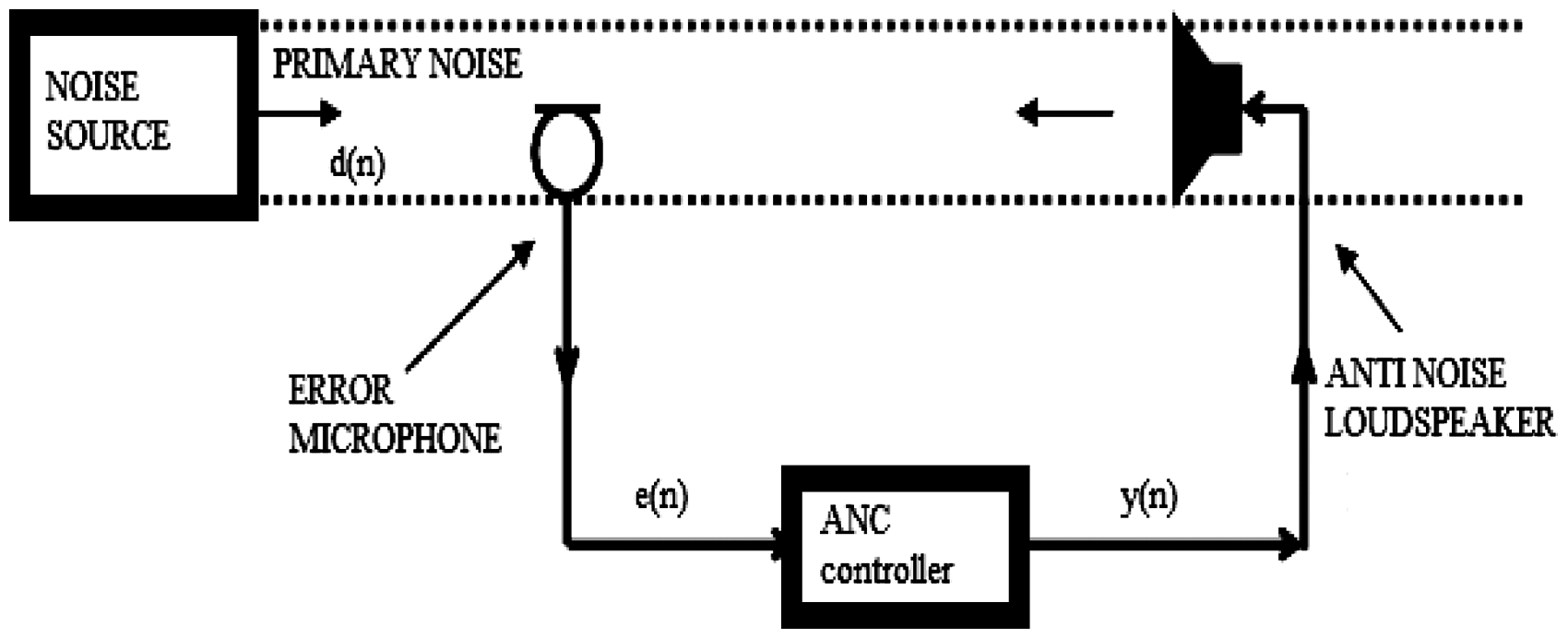
ANC systems can be classified into two categories: feedforward control and feedback control. In feedforward ANC system, sensor and error sensor are placed in separate locations. In feedback ANC systems, only one sensor is used, which acts as both reference and error sensor. 14
Figures 1 and 2 show the feedforward ANC system and feedback ANC system, respectively.
Feedforward ANC system. Feedback ANC system.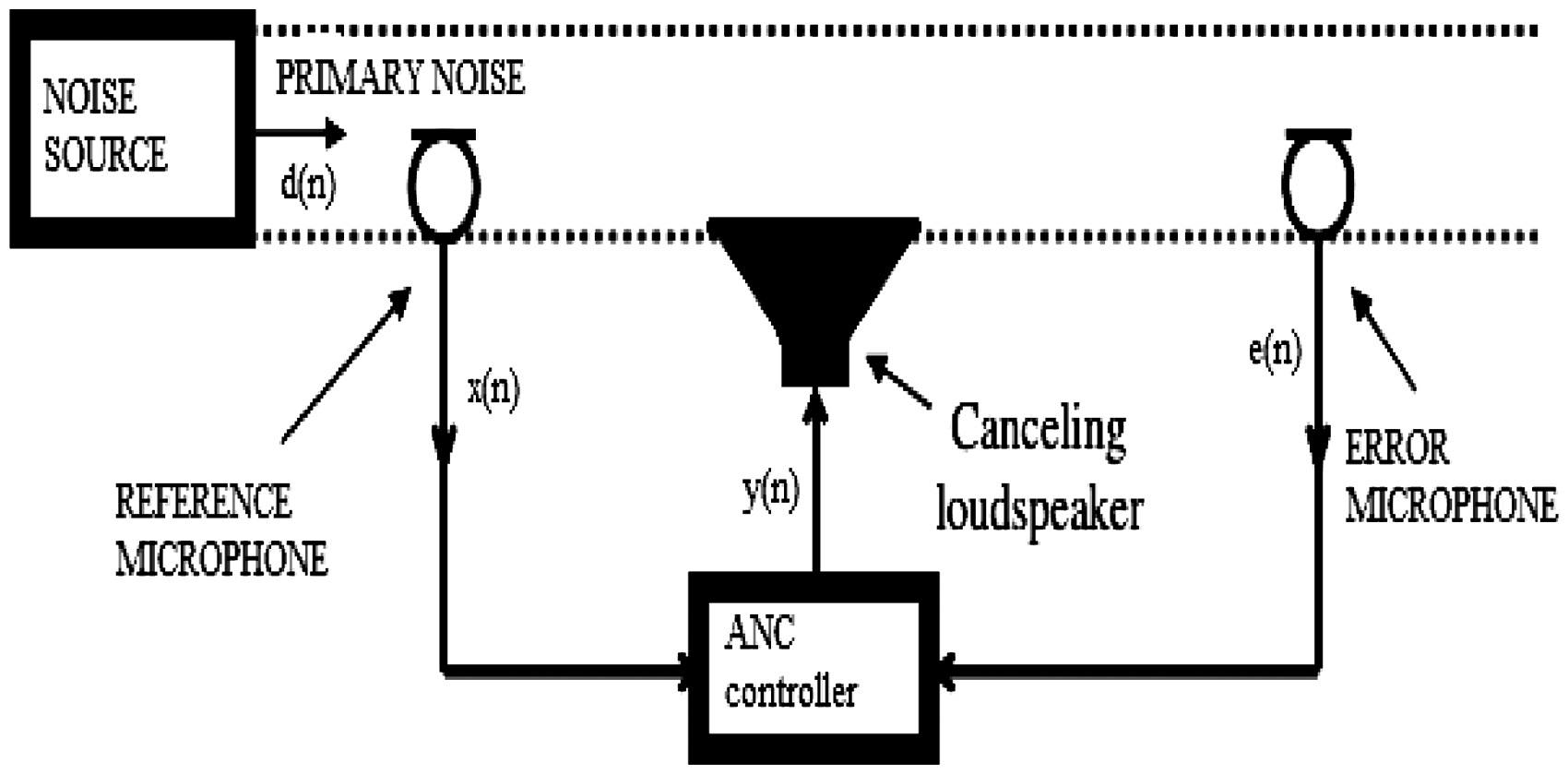
The main idea of this paper was firstly proposed in Yamada et al. 22 Feedback ANC system and its block diagram are studied in ‘Feedback ANC system’ section. ‘WAVENET theory’ section presents the WAVENET theory needed for the proposed method and ‘WAVENET ANC system’ section presents the proposed WAVENET ANC system. The ability of the proposed approach in ANC is shown in simulation results in ‘A simulation study’ section. Finally, conclusions are drawn in ‘Conclusion’ section.
Feedback ANC system
In this paper, the proposed approach is based on the feedback ANC. Figure 2 shows a feedback ANC system, where the primary noise signal Basic block diagram of the feedback ANC system.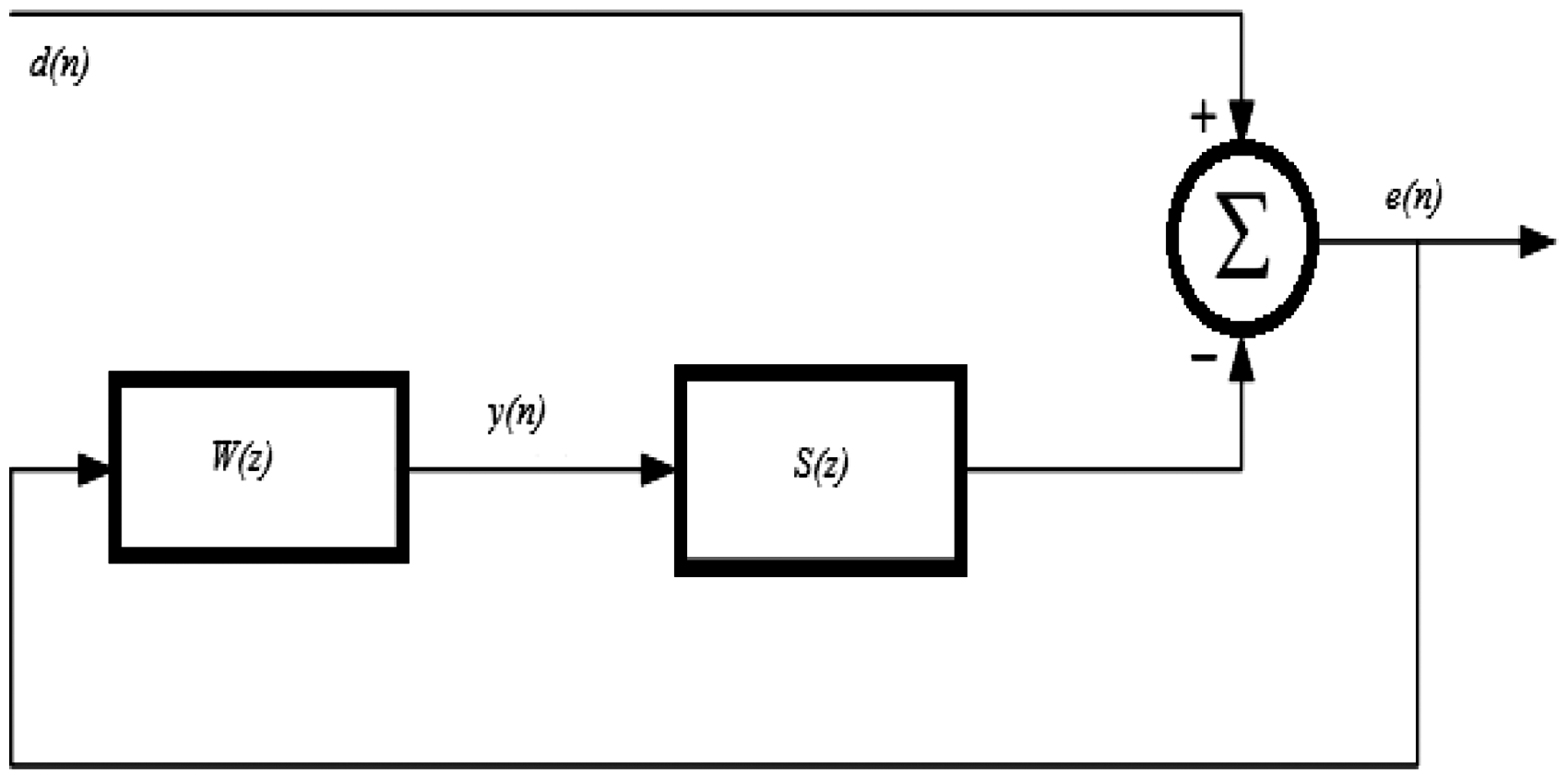
From Figure 3, one can express the primary noise in the z-domain as,


Figure 4 shows a complete block diagram of the feedback ANC system.
Complete block diagram of the feedback ANC system.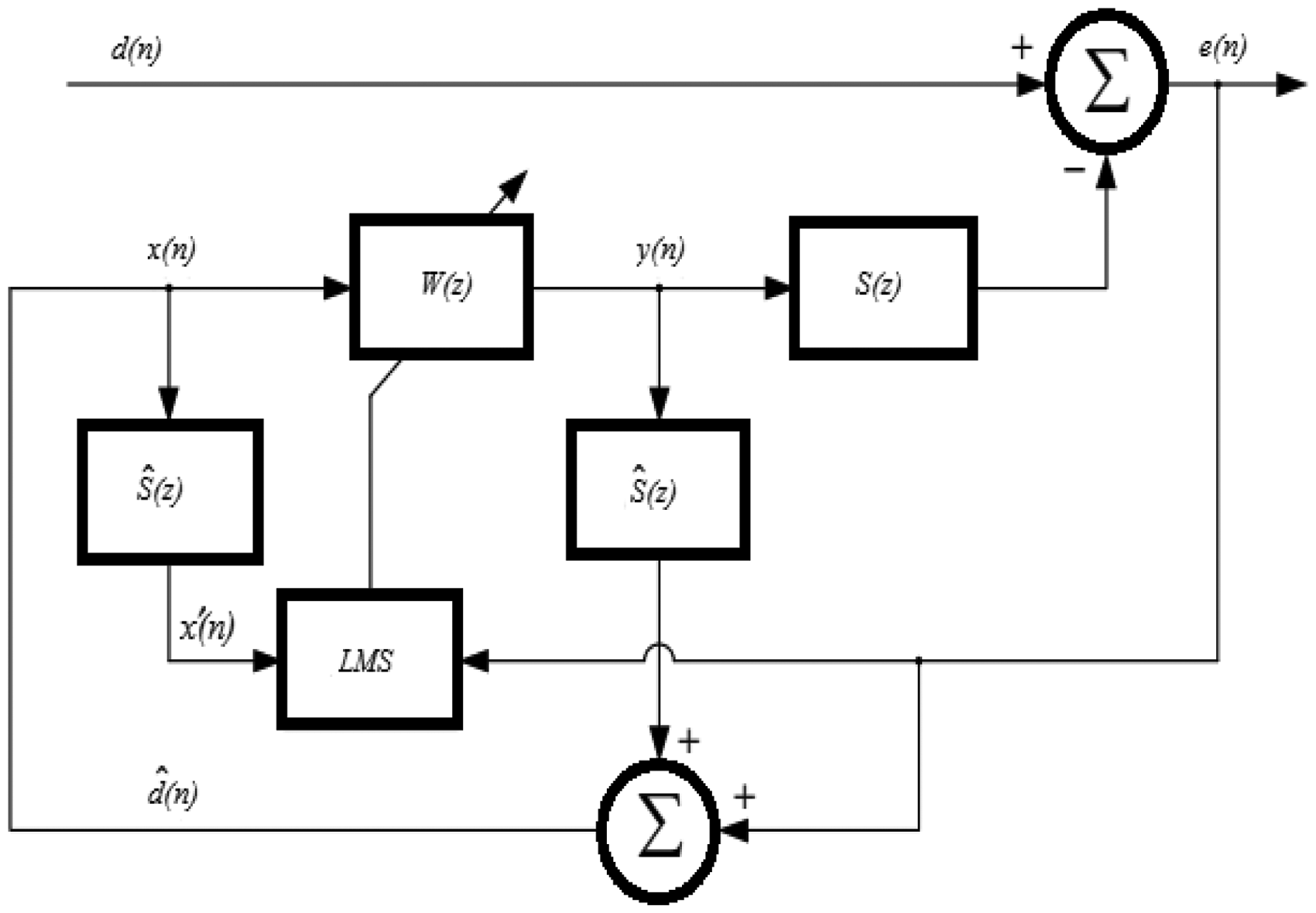
From Figure 3, one can see that the reference signal



If this condition holds, which is assumed so, the adaptive feedback ANC system will be equivalent to the feedforward ANC system. If the LMS algorithm converges with a slow pace, i.e. the step size μ is small, then the adaptive filter Block diagram of standard adaptive predictor.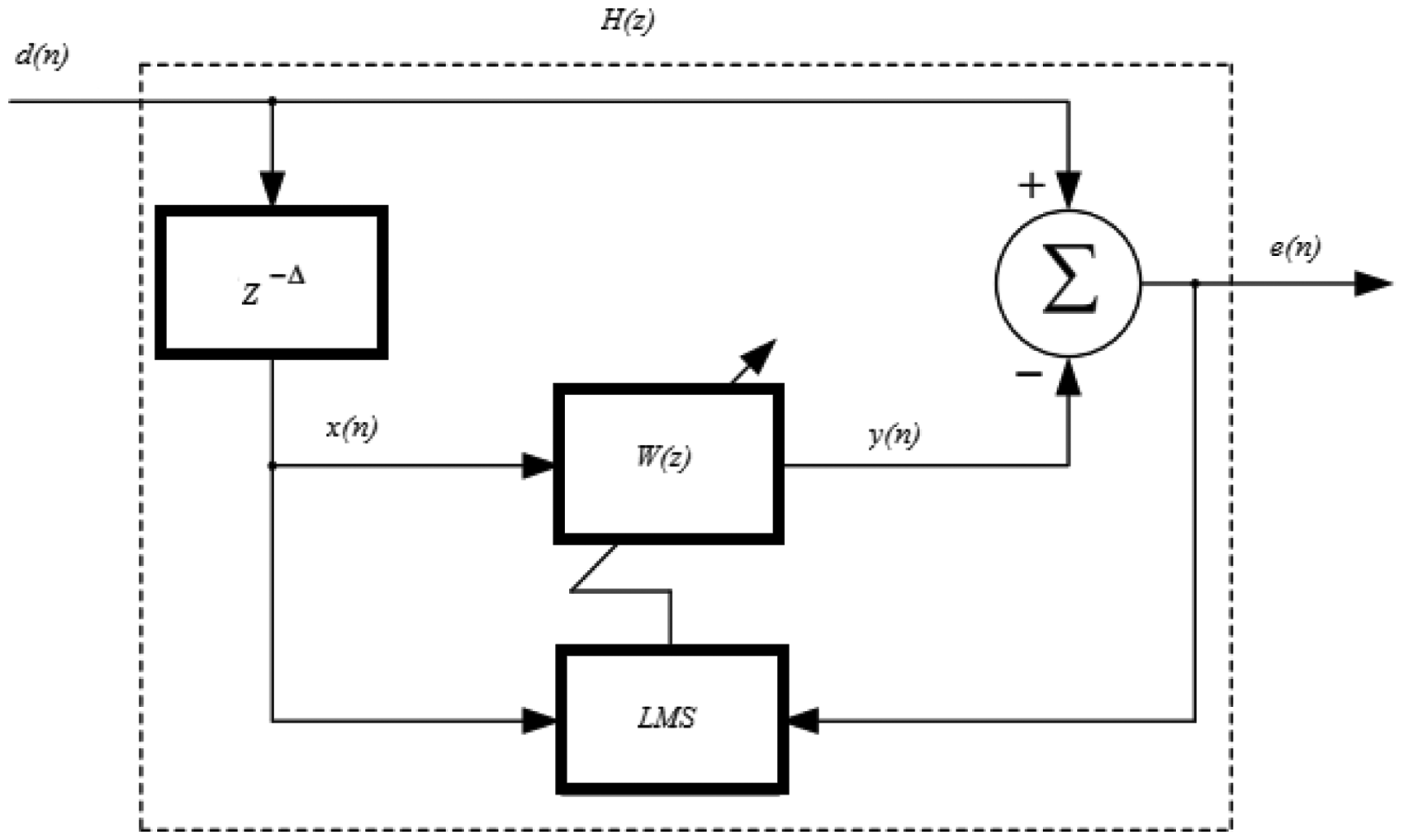
As a conclusion, one can use an adaptive predictor of the primary noise as feedback ANC system to minimize the residual error noise. In Figure 5,

WAVENET theory
Identification using WAVENET
In the last few years, several approaches using artificial neural network (ANN) have been developed for identification of linear and nonlinear systems. To start the identification, one should collect a set of input–output plant data through experiments. Hence, a sequence of






Wavelet function and network
The term wavelet means “a little wave”. A little wave in the positive direction and also negative direction, of its amplitude, has a minimum oscillation and a fast decay to zero. This property is similar to a required condition of a function that is used for the wavelet transform.
As studied by many researchers,26,27 WAVENET can be used to approximate a signal. To do this, the goal is to find daughter wavelets. The daughter wavelet is created by a dilation (scale or compression) and translation (shift) of the original wavelets or mother wavelets. The wavelet theory has created a transformation called wavelet transform. The transform operates on a function by incorporating it with an adjusted form of some kernel functions called mother wavelet and also some kernel functions called daughter wavelet.
A function should have a condition to be known as mother wavelet. For a given function

The wavelet transform of a function


Wavelet function can be categorized into two classes: orthogonal wavelet and wavelet frame. 25 When related wavelet transform is orthogonal, it results to an orthogonal wavelet. Furthermore, with operating the simple operations of translation and dilation on mother wavelet function, the wavelet frame will be produced. The wavelet frame is a powerful tool for nonlinear identification. 28
WAVENET algorithm
Approximation of a nonlinear function is an important task for many applications. To approximate a nonlinear function using WAVENET, first one should construct a network, and then, error minimization should be performed by the algorithm. A WAVENET is classified in feedforward neural networks with benefits from wavelet as activation function. There is a relation between the inverse of discrete wavelet transformation with a single hidden layer of the neural network.
25
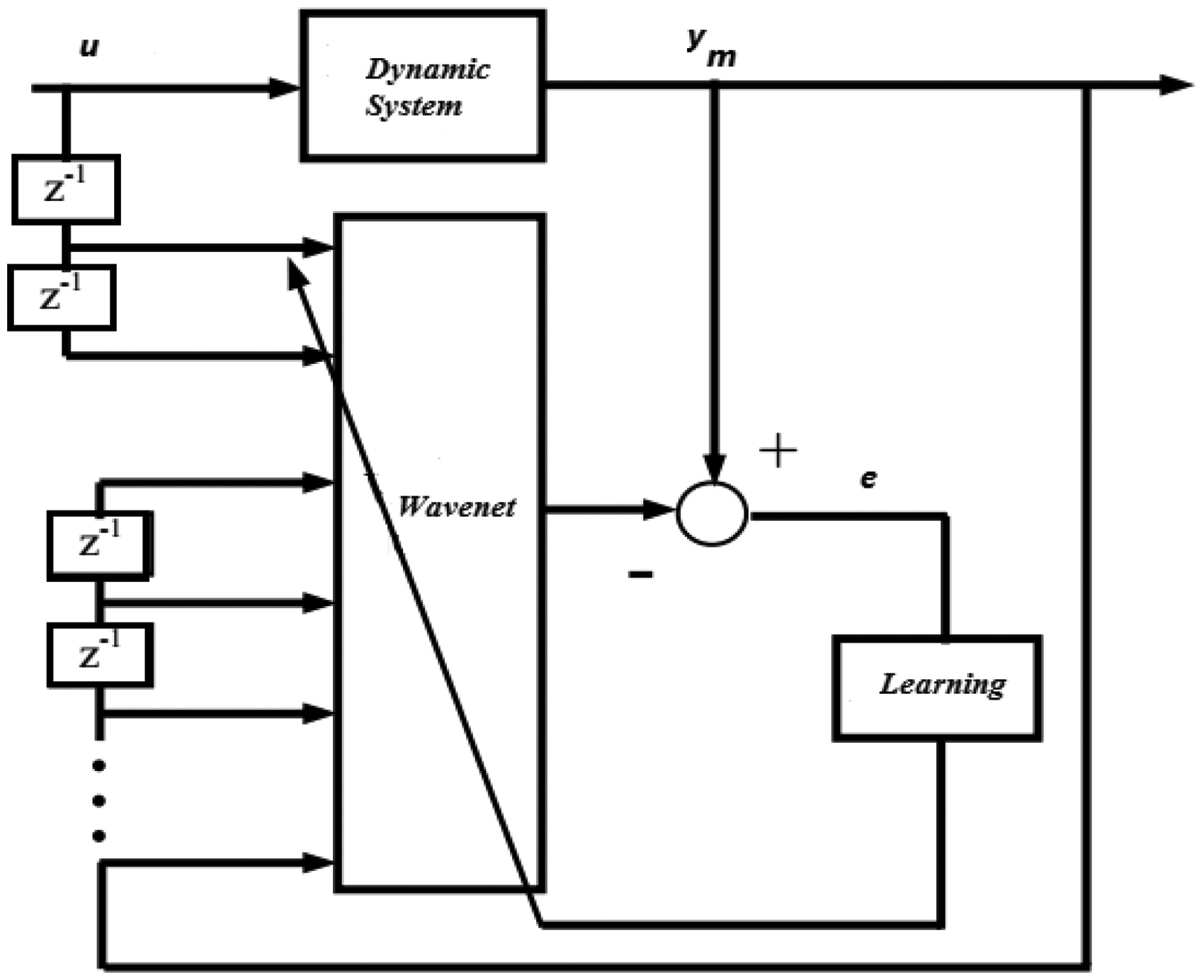
If a nonlinear auto-regressive with exogenous inputs (NARX) model structure is used as approximation, then the proposed network configuration for system identification will have WAVENET serial-parallel model. The proposed structure is shown in Figure 6.
Serial-parallel WAVENET model for system identification.
25
To approximate a signal
Supposing that the output function of the network fulfils the permissibility condition and the network could approximate the desired signal, and, time-frequency region which is efficiently covered by their K windows, then the approximated signal of the network Structure of adaptive wavelet network.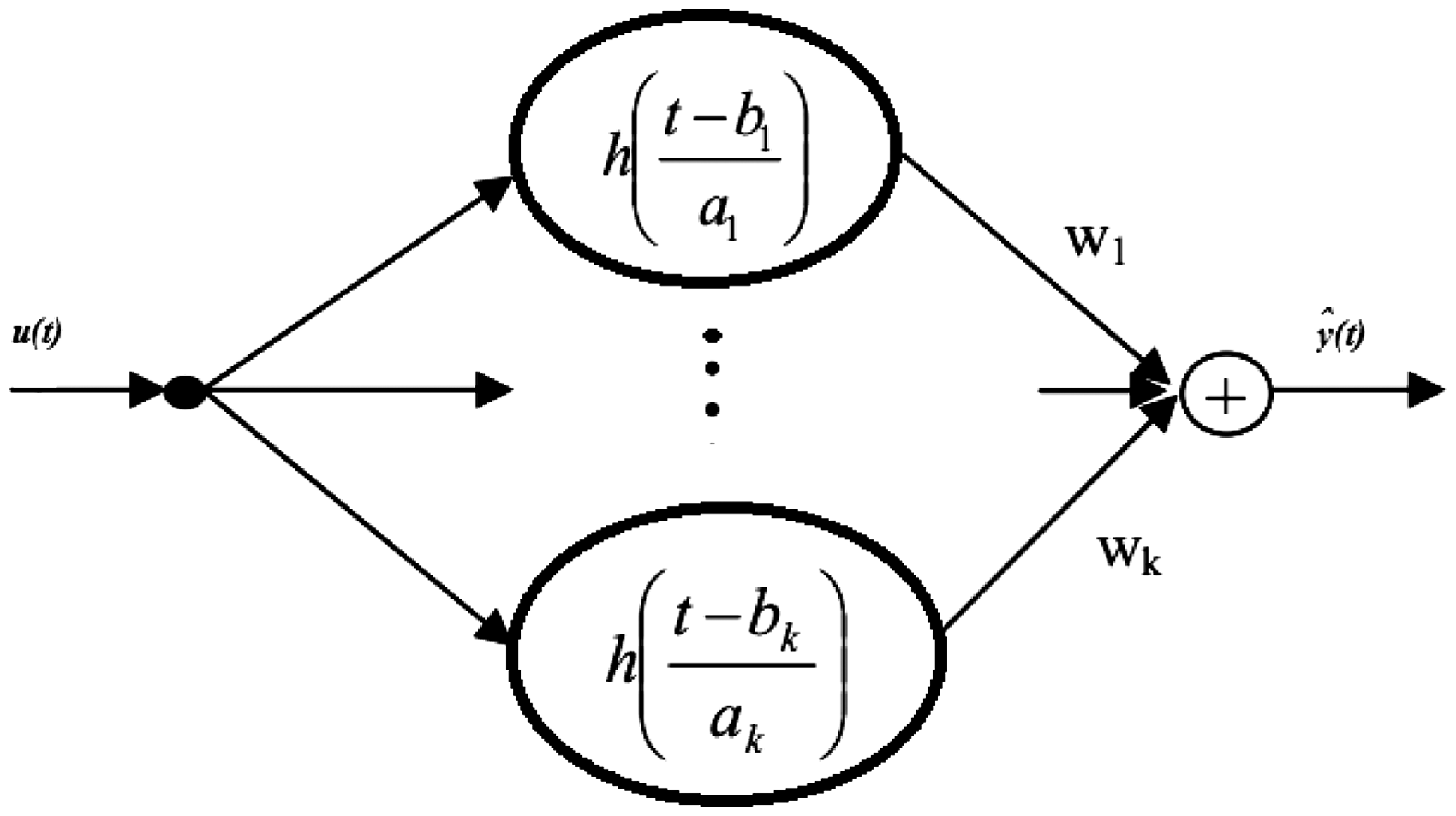

One should define the cost function to tune the neural network parameters


One should apply the steepest descent approach to minimize E. To calculate the steepest descent, one needs the gradient



Each of the network parameters w, b, a of the WAVENET is updated as:



WAVENET ANC system
In this paper, a WAVENET is used as a predictor of the primary noise. Figure 8 shows a block diagram of the proposed approach. In the simulation section, the secondary path S(z) is supposed to be a pure delay Block diagram of the predictor using WAVENET.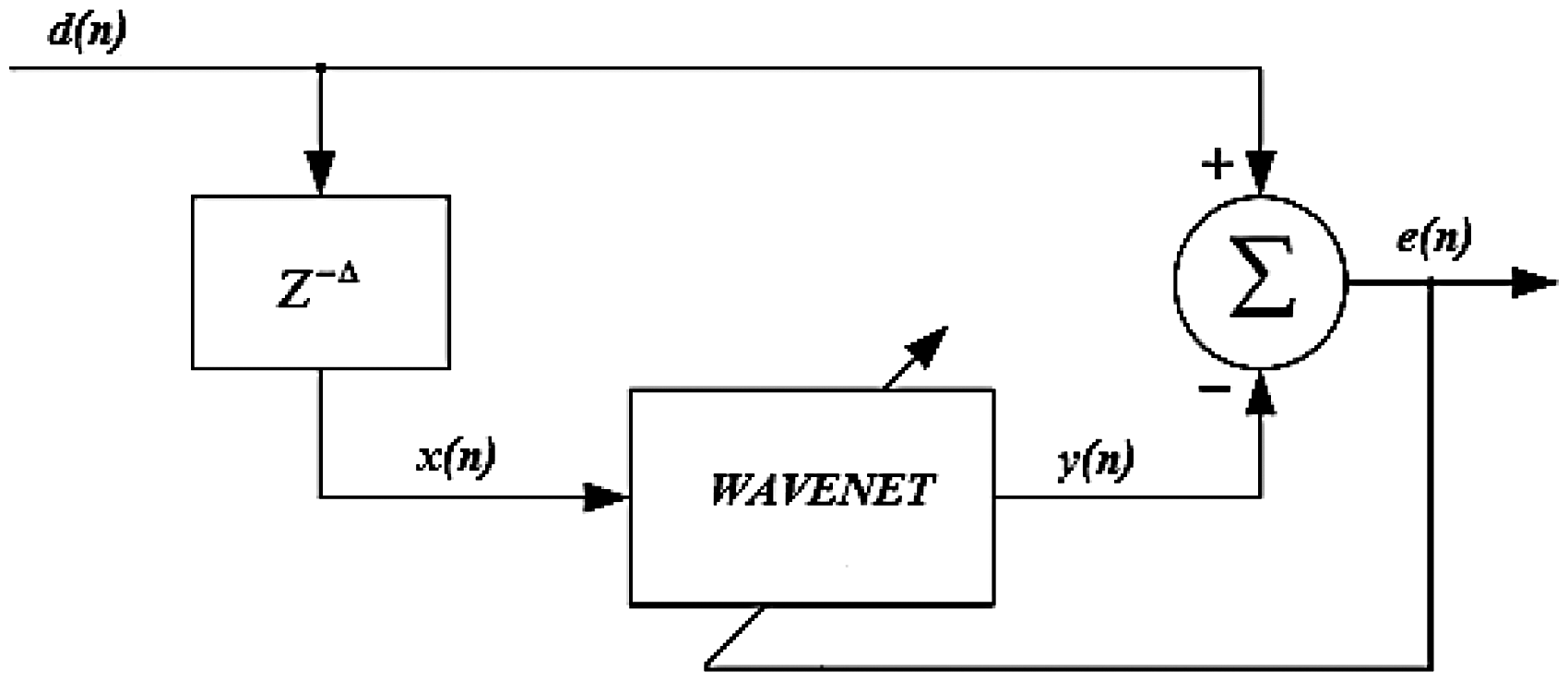
The input of the WAVENET is N samples which are passed through the pure delay. The WAVENET uses these N samples to predict the
A simulation study
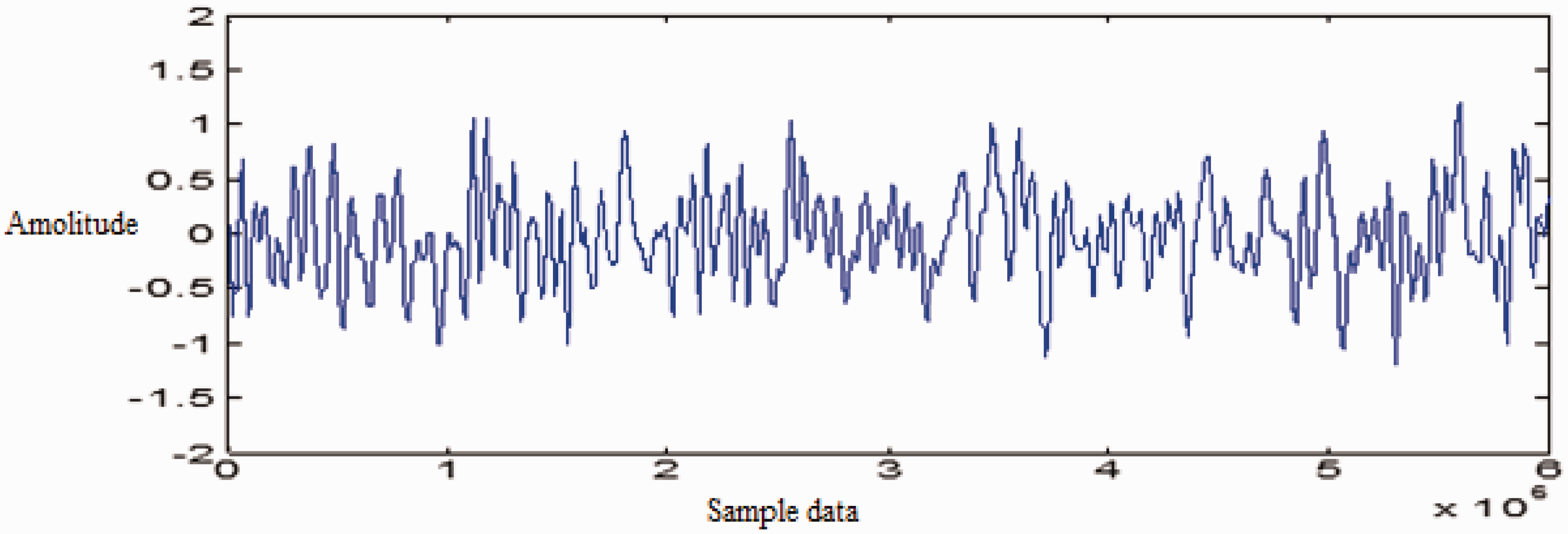
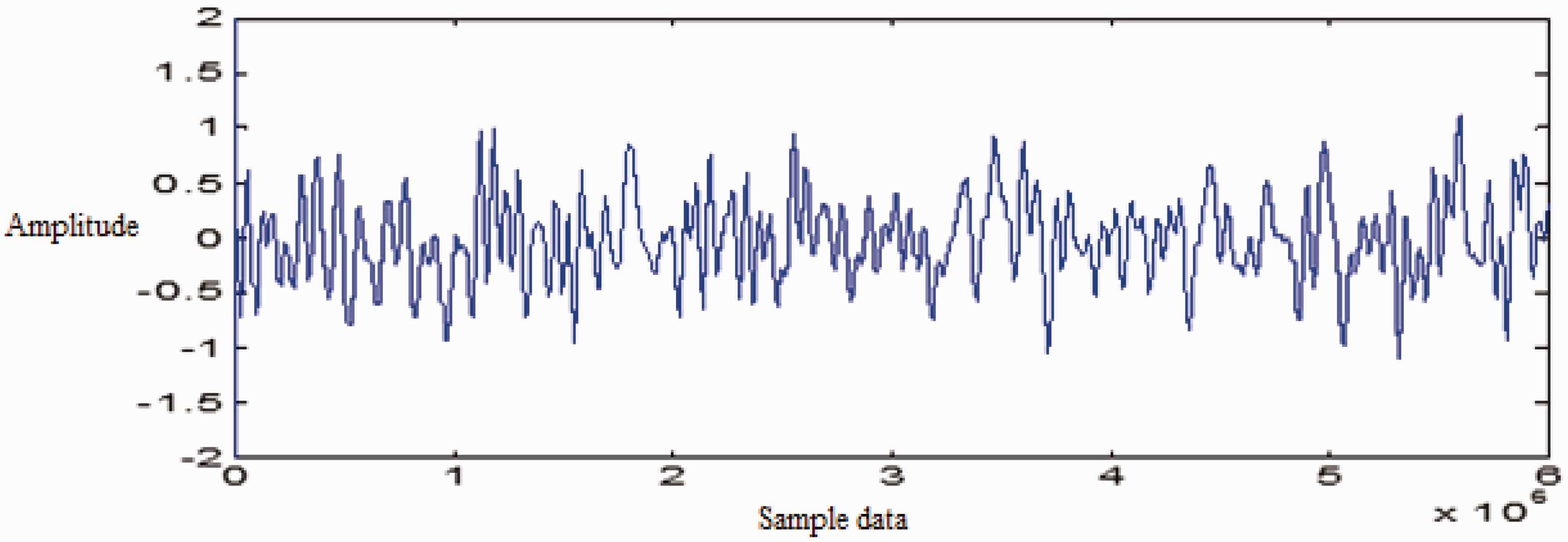
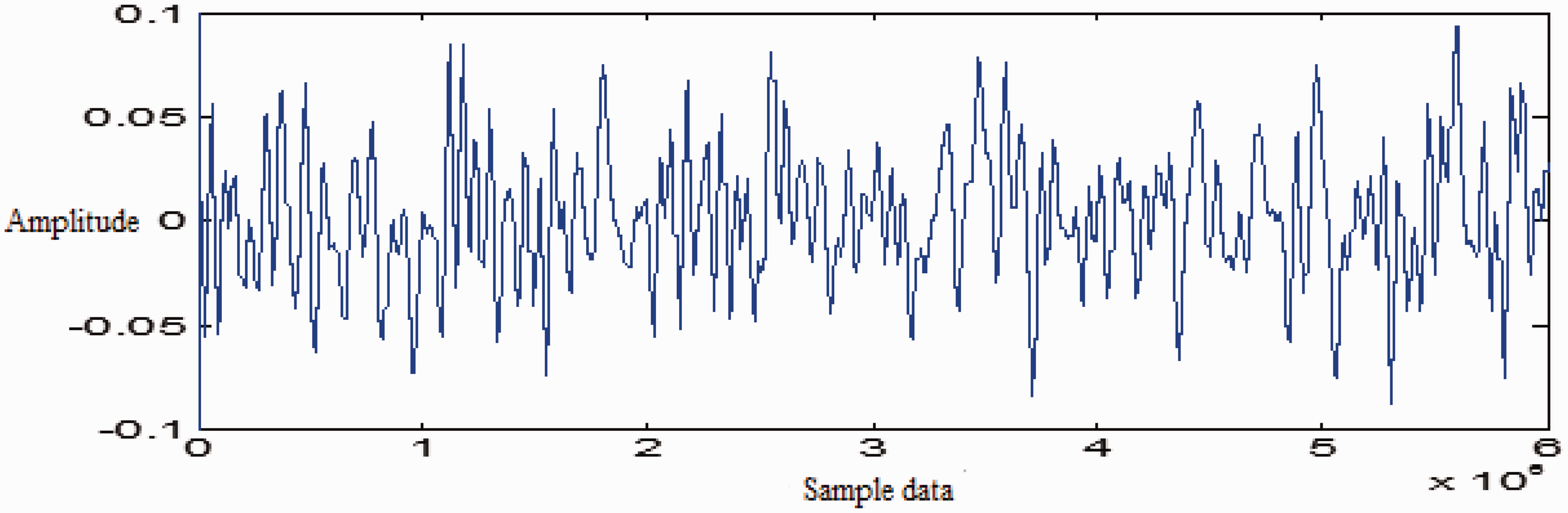
In this section, results of simulations are presented to show the effectiveness of the proposed method. One of the common methods of evaluating the ANC system performance is to use Gaussian white noise. However, this noise is not completely suitable for this work, because the acoustic noise does not cover all the ranges of the frequency. Furthermore, in acoustic noise despite the white noise the samples are dependent on each other. Therefore, for the simulation exercises, the acoustic noise is produced from 2000 samples of white noise and passed through a type-2 Chebychev low pass filter. The degree of the filter, attenuation range and cut-off frequency used were 9, 50 dB and 6 kHz, respectively. Using the obtained coloured noise, the training of the WAVENET can be done. For the training process the first 1000 samples were used. The data was fed into the WAVENET using the tapped delay line. Since the transfer function Compatibility of the WAVENET in the training process and comparison it with the linear fitting. The noise which is tested for the trained WAVENET. Anti noise signal produced by the WAVENET. Residual error of noise signal produced by the WAVENET.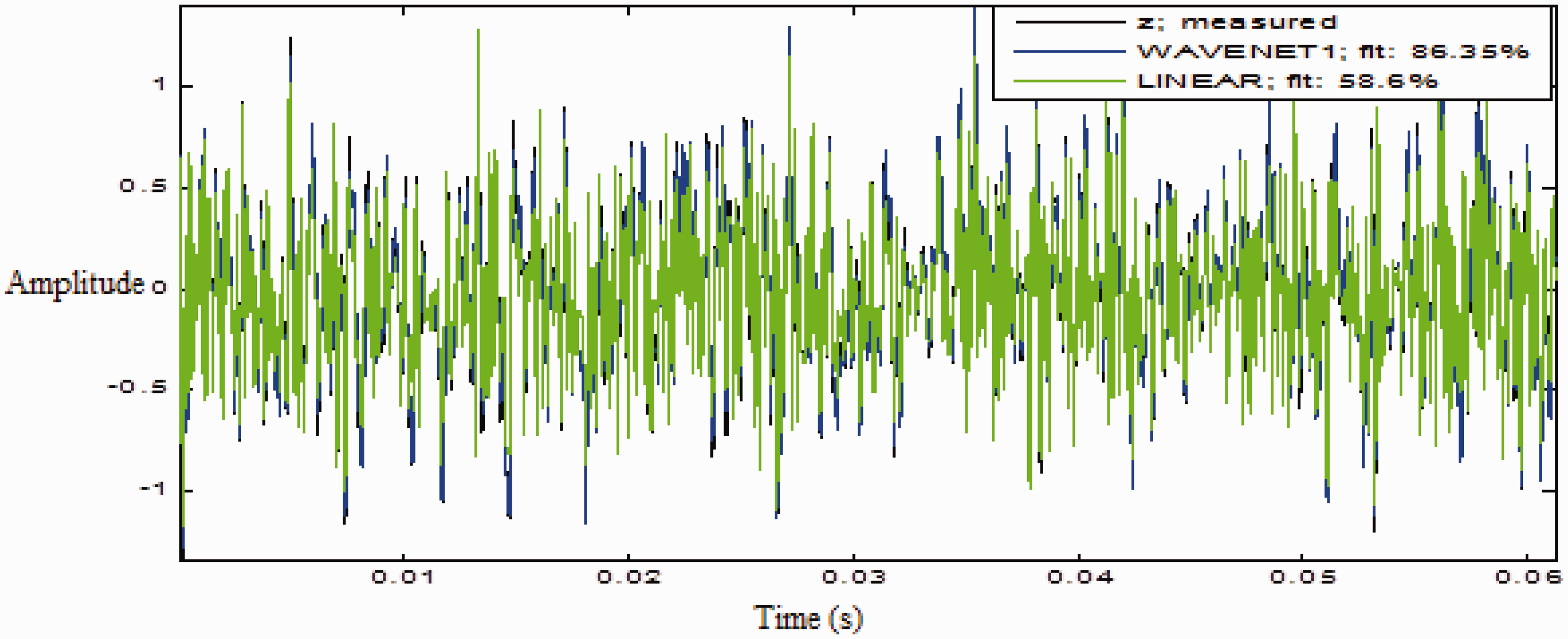

Performance of the trained WAVENET with the coloured noise over 0–5 kHz frequency range.

Performance of the trained WAVENET with the coloured noise over 0–3 kHz frequency range.

For the next set of simulations, the input noise was periodic with frequency 250 Hz. The sampled noise passed through the pure delay and entered the WAVENET. Figure 13 shows the acoustic noise and the residual noise for the first simulation. In the second simulation, the input noise was the combination of two periodic noises with frequencies of 250 Hz and 350 Hz. Figure 14 shows the residual noise for the second simulation. In the third set of the simulation, the input noise was broadband. Figure 15 shows the input noise of the ANC system. To check the effectiveness of the proposed method, the power spectral density (PSD) of the input noise and of the residual noise is shown in Figures 16, 17 and 18 for the three simulations, respectively.
The residual noise and the 250 Hz sinusoidal input noise. The residual noise and the 250 Hz sinusoidal and 350 Hz sinusoidal input noise signals. The broadband input noise and resulting residual noise. PSD of 250 Hz input noise and the residual noise. PSD of 250 Hz + 350 Hz input noise and the residual noise. PSD of broadband input noise and the residual noise.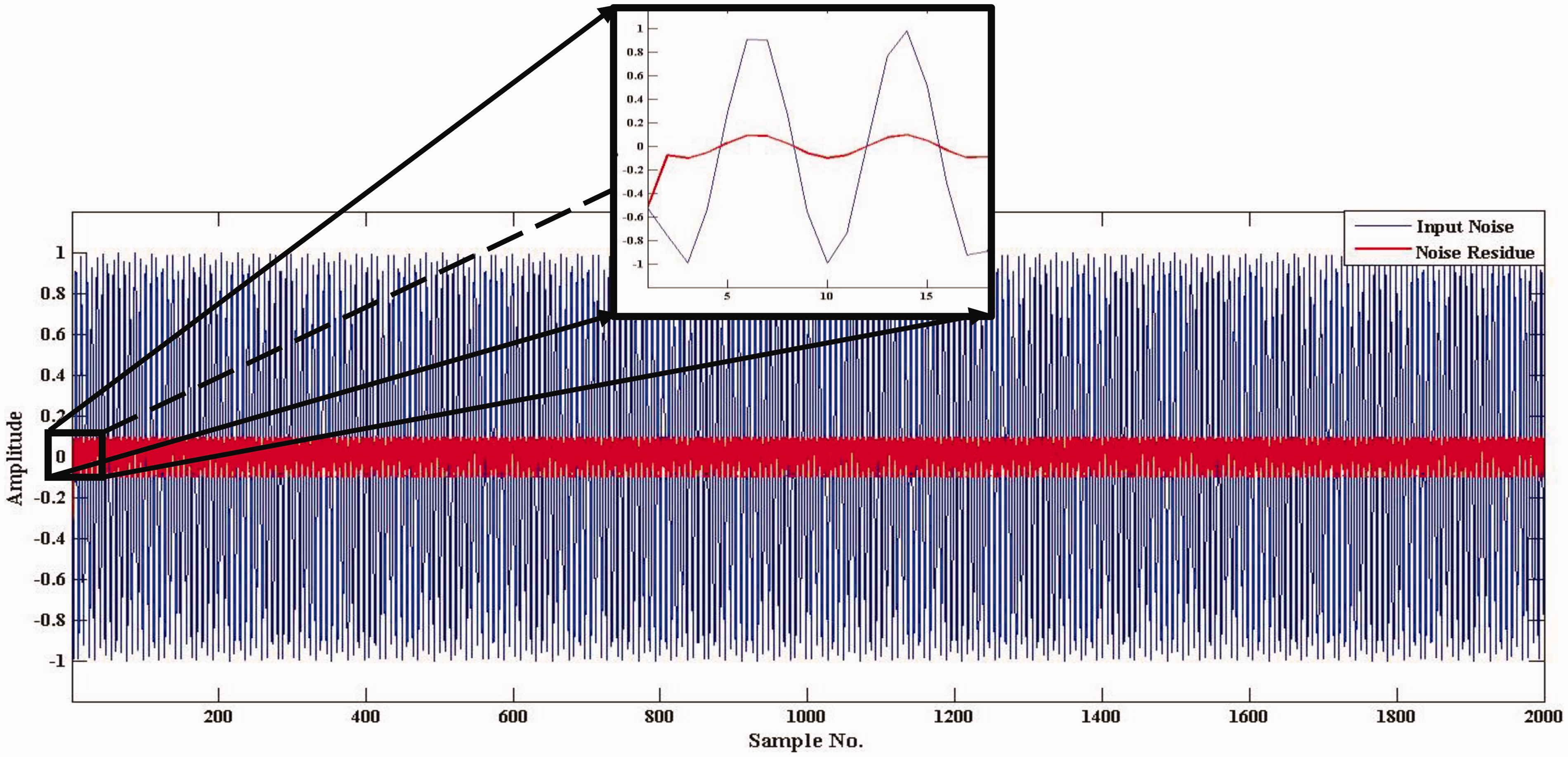
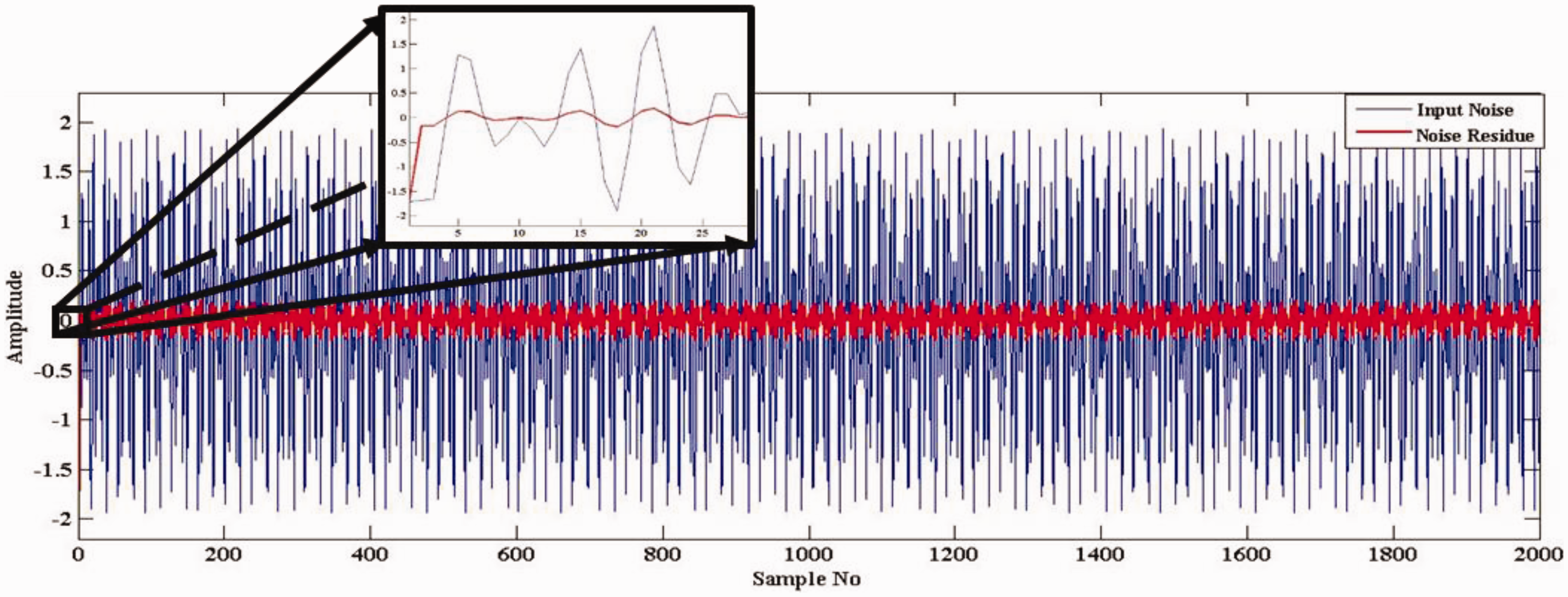
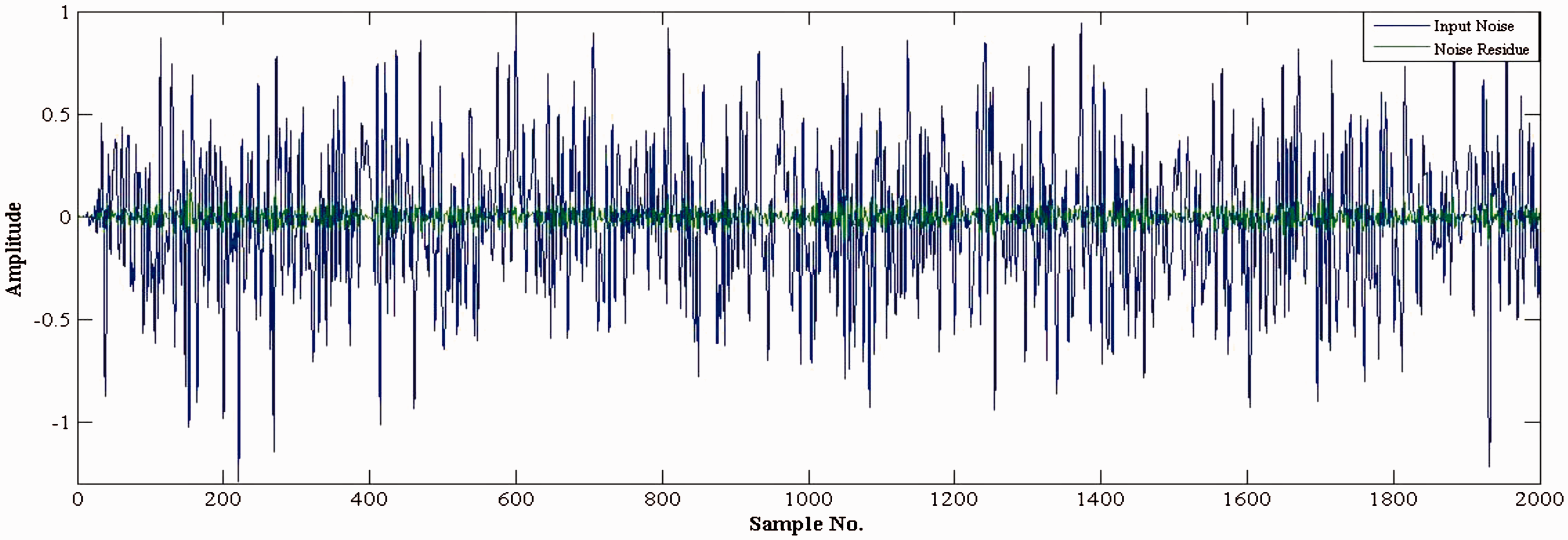
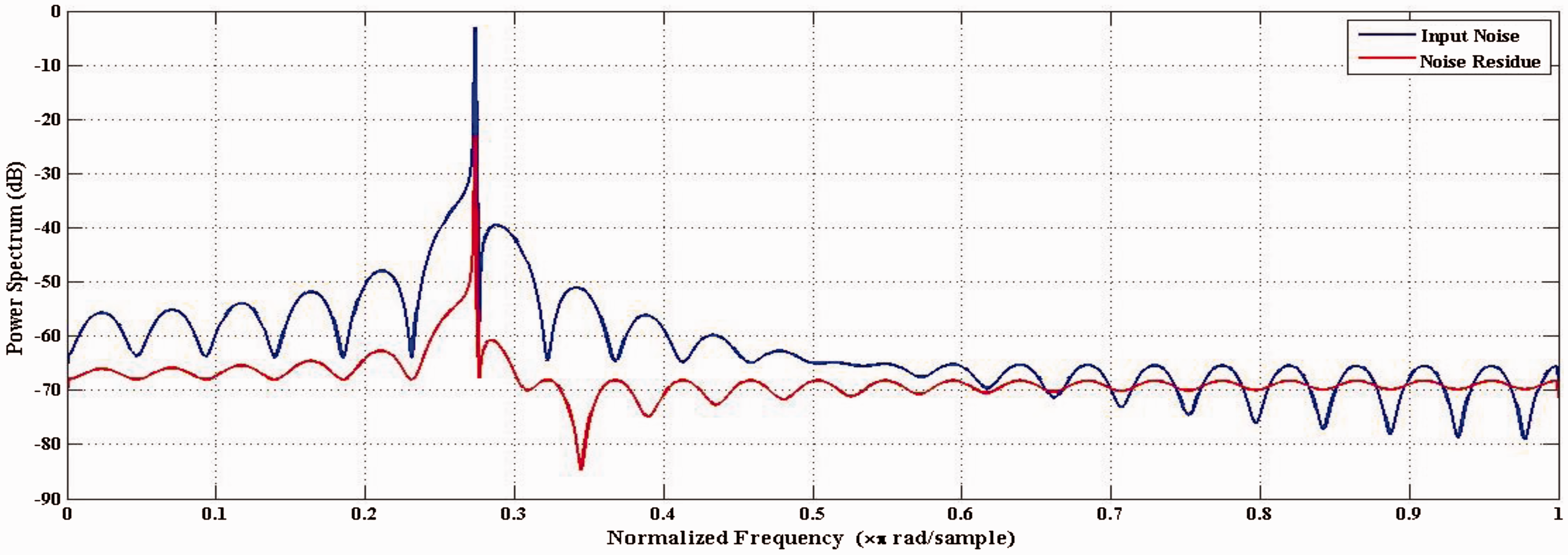
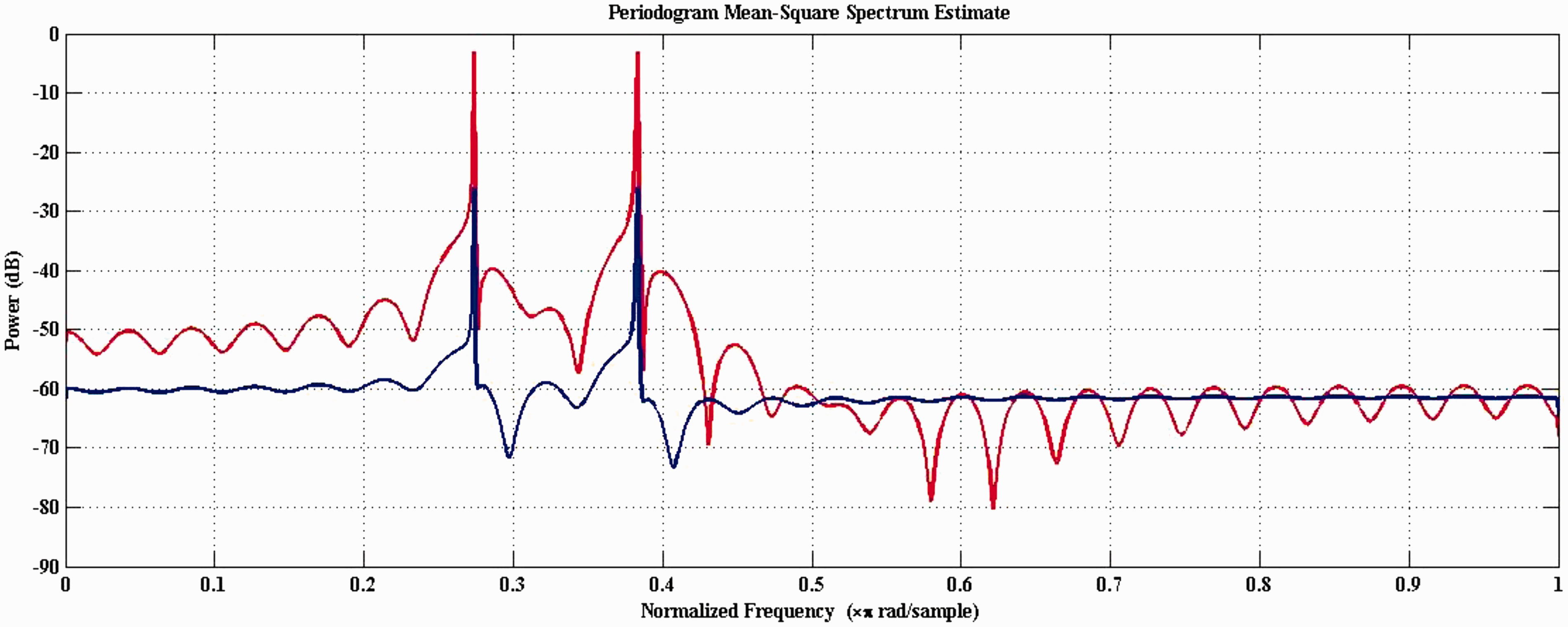
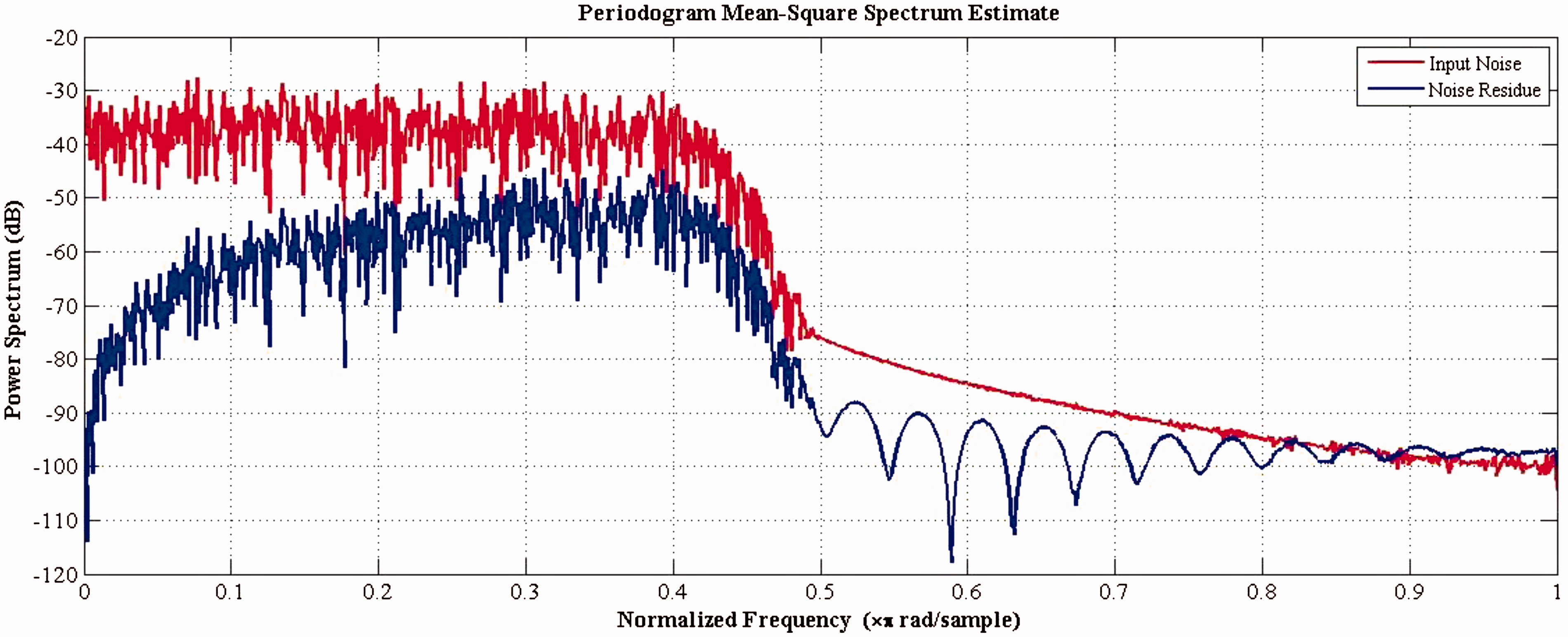
Figure 16 shows the PSD of the
Conclusion
In this paper, a WAVENET ANC system has been proposed. The conditions for converting the feedback ANC system to a signal predictor have been discussed. The proposed method was tested in simulations to show its effectiveness in producing an anti-noise signal to make a silent zone in the presence of the disturbance. The PSDs of the input noises and the residual noise in the silent zone have shown promising results for effectiveness of this method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.