
Abstract
An important characteristic of permanent magnet synchronous machines is that they are extremely efficient due to the absence of rotor losses, such as in induction motors, and the use of permanent magnets for field excitation. This makes them a superb choice for applications involving motors and generators. In motor applications, key considerations revolve around speed, torque, and how machine parameters are affected by changes in ambient circumstances. Regrettably, using permanent magnet synchronous motor is influenced by all these aspects. This allows researchers to develop successful hybridization approaches combining different advanced controls to achieve optimal control mechanisms for these motors. This work presents a hybridization of nonlinear and optimum controls for optimal performance of permanent magnet synchronous motor under varying operating conditions by combining backstepping control and linear quadratic regulator control. By including the error as a state variable and applying the linear quadratic regulator technique to determine the control law, the steady-state error is reduced. The optimal linear quadratic regulator technique is defined by stabilizing and reducing oscillations in the permanent magnet while increasing system performance based on steady-state error. Meanwhile, the backstepping control helps maintain the regime's stability in the face of disturbances, which are represented by variations in load torque, speed, and motor parameters. A comparison study was performed to assess the efficacy of the suggested system against two contemporary control techniques: Exponential reaching law-sliding mode control and model predictive control. The findings indicate the superiority of the recommended method. All simulations were performed using MATLAB/SIMULINK.
Keywords
Introduction
Permanent magnet synchronous machines provide several benefits when used as generators and motors. Their great efficiency results from using permanent magnets for field excitation and the lack of rotor losses. They are favored for their lower energy usage and operational costs, making them ideal for situations where energy efficiency is crucial. Because of their high power density, these machines are lightweight and compact. They may be integrated into wind energy applications more easily than other types that need additional external devices and gearboxes (Mosaad, 2020; Mosaad et al., 2021; Mosaad, Sabiha, Abu-Siada & Taha, 2021).
Contemporary motor applications need accurate regulation of speed, torque, and position to fulfill the growing complex needs of different sectors. Precise speed control is crucial for ensuring constant motor operation and reaching required performance levels in applications, including robots, CNC machines, and electric vehicles. Accurate torque management is essential to achieve efficient power transmission, avoid overload situations, and sustain operational stability under various operating circumstances. Accurate position control is crucial for precise motion control in automated manufacturing and robotics applications, allowing activities like positioning, alignment, and tracking. Permanent magnet synchronous motors (PMSMs) are appropriate for these applications. This results from their elevated power density, significant torque-to-inertia ratio, high efficiency, minimal loss, outstanding precision, simple construction, and robustness characteristics (Abu-Rub et al., 2012; Fu et al., 2021; Guo et al., 2019; Zhang et al., 2021a; Zhao & Fu, 2019). However, obtaining peak performance requires advanced control techniques that can efficiently handle variations in load torque, speed references, and environmental conditions. An effective control system for PMSMs should promptly and precisely adjust to variations in operating circumstances to maintain steady and efficient motor performance. Conventional controllers, such as the PI regulator-dependent field-oriented control (FOC), have been used for PMSM control. Still, they are ineffective for high-performance control in situations requiring adjustments to speed levels, uncertainties, or external system disturbances.
Conventional control techniques, such as FOC, form the basis of PMSM drives; however, their linear characteristics limit adaptability in dynamic operating conditions. They must specifically address nonlinear coupling effects and maintain accuracy amid variations in speed and load. The researchers focus on advanced controls, where each methodology relies on intelligence algorithms, nonlinearity, optimization, robustness techniques, and/or nonlinear feedback control, adaptive control, and optimal control (Bao et al., 2020; Chang et al., 2019; Djelamda & Bochareb, 2022; Li, 2019; Lin, 2020; Nicola et al., 2022; Wang et al., 2019; Zhu et al., 2020).
Nonlinear control encompasses a range of methods, including passivity-based control (PBC), sliding mode control (SMC), feedback linearization control (FBLC), backstepping control (BSC), and enhanced hybrid methods like merging FOC or DTC and SMC using the Wolf optimization algorithm. PMSM controllers frequently use the BSC, SMC, and FBLC. SMC or BSC are preferred for PMSM control because they compensate for the nonlinearity of the system, whereas FBLC control utilizes the linearization algorithm. Cost minimization is necessary for the best control, including linear quadratic regulator (LQR), LQI, and LQG (Jin et al., 2021; Khalil, 2002; Larbaoui et al., 2022; Zhu et al., 2021).
The terminal SMC has notable characteristics, including rapid and finite-time convergence. Due to its extended convergence time and deteriorating dynamic features when the system is not in equilibrium, it is generally unsuitable for most applications (Fu et al., 2021b; Song et al., 2022; Xu et al., 2018; Zhu et al., 2020).
By putting forth a hybrid approach that combines SMC with more sophisticated methods like adaptive, intelligent, or optimum control, some other researchers were able to address the issues raised above. Between the passivity-based control and the SMC according to exponential reaching law, a novel design control is proposed (Larbaoui et al., 2022b). In design, the d-q currents loop is subject to passivity-based control, and the speed loop is subject to SMC. While this hybrid controller outperforms a classical SMC, undershoot in speed performance during disturbances and uncertainty means that the performance characteristics are not greatly improved. A novel advanced design based on the super twisting algorithm (NSTA) for the speed loop and FOC for the current loop was studied (Zhang et al., 2021b).
In order to provide speed regulation in the face of uncertainties and disturbances, a hybrid technique combining the terminal sliding mode with BSC was investigated (Wu & Zhang, 2018), (Ning et al., 2018; Li et al., 2021; Tavoosi, 2020). The latter provided somewhat robust control and stabilized the steady-state error. On the other hand, chattering, overshooting, and undershooting are phenomena that occur during torque application and speed changes.
Other studies proposed several new sliding modes, including super-twisting sliding modes based on intelligent proportional-integral control (Gao et al., 2020a), adaptive sliding modes based on super-twisting modes (Gao et al., 2020b), fractional-order method-based sliding modes (Lu & Yuan, 2021; Mebkhouta et al., 2024a), intelligent control-based sliding modes (Ding et al., 2022; Zaihidee et al., 2019), and hybrid controls combining FOC, adaptive, sliding modes, and intelligent control (Gao et al., 2020b; Hoai et al., 2020; Wang et al., 2021b). However, the key task facing the researchers is still to optimize more PMSM performance parameters and apply robust control to attain high performance resilient to uncertainties and outside disturbances.
One of the most critical problems facing the machine's performance is disturbances and uncertainties. To overcome these, hybrid (again) nonlinear speed controls for the PMSM must be developed (El Fakir et al., 2023). Backstepping control (BSC) is one of the most common methods in nonlinear control. It is based on defining a virtual control state, and then it is forced to become a stabilizing function. Consequently, the error variable can be stabilized by appropriately designing the related control input based on the Lyapunov stability theory (Shao et al., 2023). BSC is a viable nonlinear method for mitigating disturbances in speed loops. However, in contemporary loop applications, BSC alone cannot alleviate current ripple, narrow tolerance bands, or enhance transient convergence speed. Its constrained steady-state precision diminishes its efficacy in robust, high-dynamic performance contexts.
LQR is an optimal control applied to a wide range of MIMO systems. The quadratic cost function allows the designer to balance many performance goals. The objective of LQR control is to minimize energy and optimize the performance of the system (Karboua et al., 2024; Pohl & Bartik, 2018). By minimizing a performance index that equilibrates state deviations and control effort, LQR yields an analytically calculated state-feedback control rule, guaranteeing stability and optimum performance. Its principal advantages are computational efficiency, assured stability for controlled systems, and adaptability in tuning via weighting matrices. This paper presents a hybrid control strategy for the PMSM that integrates nonlinear and optimal control techniques. The nonlinear control is implemented via a BSC, which is dedicated to the outer speed loop to ensure robustness against external disturbances. In parallel, the optimal control is realized through LQR, which is specifically applied to the inner current loop for decoupling compensation between the d- and q-axes. The LQR controller generates the voltage references by minimizing a predefined quadratic cost function, thus ensuring optimal tracking and enhanced dynamic performance of the current components.
The main contribution of the paper is the development and implementation of a novel hybrid control strategy for PMSMs that effectively addresses the challenges associated with variations in operating conditions, disturbances, and uncertainties. More specifically, the proposed hybridization combines a BSC to stabilize the PMSM speed loop under dynamic load and speed variations alongside LQR-based current controller. This LQR is designed to minimize the error between the reference and target speeds and reduce cross-coupling effects. The LQR regulates input voltage to the PMSM, employing the current error as feedback, and providing optimal control signals that enforce decoupling of d-q axes coupling while enhancing the current profile under varying operating conditions.
This hybrid control strategy is developed to enhance the overall performance of the PMSM by addressing persistent control challenges that are not fully resolved by existing linear or nonlinear approaches. To overcome the limitations of these conventional control techniques, the proposed hybrid controller combines BSC with LQR control, uniting the strengths of nonlinear robustness and optimal feedback regulation. This synergy provides a structured and adaptive control architecture capable of achieving high precision, improved transient behavior, and stable operation across a wide range of conditions.
In addition, the paper assesses the suggested BSC-LQR controller performance in comparison to two sophisticated control methodologies: exponential reaching law sliding mode control (ERL-SMC), chosen for its shown disturbance robustness (Karboua et al., 2024), and model predictive control (MPC), acclaimed for its optimum control proficiency (Karboua et al., 2023). The key contributions can be summarized as:
The paper introduces a novel approach that combines BSC and LQR control, leveraging the advantages of both nonlinear and optimal control methodologies. The proposed hybrid strategy aims to overcome the limitations of conventional control methods by effectively handling variations in load torque, speed references, and environmental conditions. The proposed approach enhances the overall performance and stability of PMSMs by integrating BSC for disturbance rejection and stability maintenance with LQR control for optimal performance and steady-state error reduction. A comparison with two modern control techniques, ERL-SMC and MPC, is investigated the efficiency of the proposed hybrid controller is demonstrated is simulated using MATLAB Simulink, providing empirical evidence of its validity and efficacy in improving PMSM performance.
PMSM modeling
Magnets substitute the rotor of a PMSM, resulting in a constant rotor flux owing to the excitation field produced by the permanent magnets. Because of the magnet's physical characteristics, the saturation effect is disregarded. The PMSMs are defined by a multi-state variable, external disturbances created in the d-q axis, or what is called back EMF to the a-b axis, in addition to eddy current and hysteresis loss, ignoring magnetic circuit saturation, and a nonlinearity feature to the electromagnetic torque. Based on these characteristics, the PMSM model can be displayed on the d-q axes as (Karboua et al., 2023):
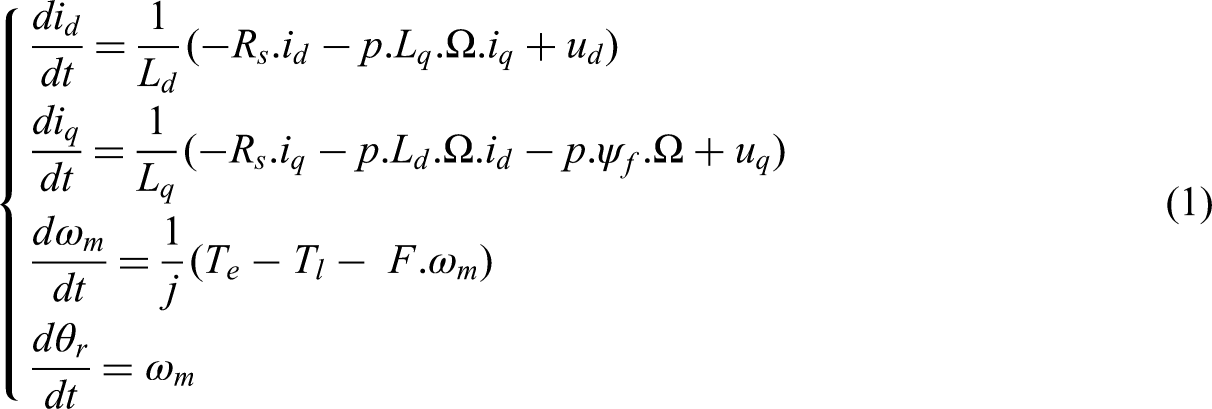
Where

Design of BSC for speed control
The design of an uncertain nonlinear system with feedback control can be accomplished by backstepping. State variables, inputs, and outputs for the control design are all identified in the nonlinear model. Making loop systems equal to stable cascade subsystems is the goal of nonlinear BSC, which endows them with asymptotic overall stability and robustness. To put it differently, this is a multi-step process. To ensure that the system will eventually approach its equilibrium state, a virtual control is created at every stage of the procedure. The Lyapunov functions, which stabilize each synthesis step, are the foundation of this BSC step. To bring the control action to life for speed control, the rotor speed and analogous currents on the d-q axis are considered influencing factors as given in Figure 1. The speed error tracking can be expressed as (Karboua et al., 2023c; Karabacak & Eskikurt, 2012; Senhaji et al., 2023):


Loop of speed controlled by BSC technique.
Depending on the mechanical equation and the electromagnetic torque expression illustrated in (1) and (2), the error derivative of the speed can be derived as:

For the sake of this application, the selected Lyapunov candidate function is specified as follows:


For the examined system to maintain stability, it must have the chosen Lyapunov candidate function positive and its derivative opposite to its sign, i.e., negative.

Based on the condition mentioned above, it should impose the tracking error as:

If the reference speed is represented as a step function, the speed dynamic error derivative will be:

It is evident that if the following reference currents are used as the control inputs, the global asymptotical control stabilization condition of (8) can be satisfied; the system convergence to its balance state may be guaranteed:

In contrast to earlier research published in earlier works, these acquired references are not applied to a subsequent sub-system by the same BSC procedure. Instead, the LQR controller that is discussed in the following section uses these references as virtual inputs. It is important to note that the primary goals of this approach are to attain global stability for the managed system and to increase the general accuracy of control.
SS-LQR control implementation utilizing BSC virtual inputs
Ordinarily, the control of the PMSM involves one of the conventional strategies, such as the FOC, which depends on the PI regulator. The operating principle of this control is focused on the linearity of the AC motor system until torque changes in a linear range as a function of the quadratic (
Conventional control design based on FOC for the PMSM's current loop
Conventional FOC relies on PI regulators, and it has been effectively applied to PMSMs and linear systems. In implementing FOC for the PMSM current loop, it is essential to construct a PI-based closed-loop controller, which necessitates linearizing the nonlinear PMSM model through decoupling and compensation techniques. This is because the stator voltage equations exhibit mutual coupling between the direct (d-axis) and quadrature (q-axis) components, as shown in Figure 2. To eliminate this interaction and allow independent control of each axis, cross-coupling terms must be compensated. Specifically, in the voltage equations, the coupling terms

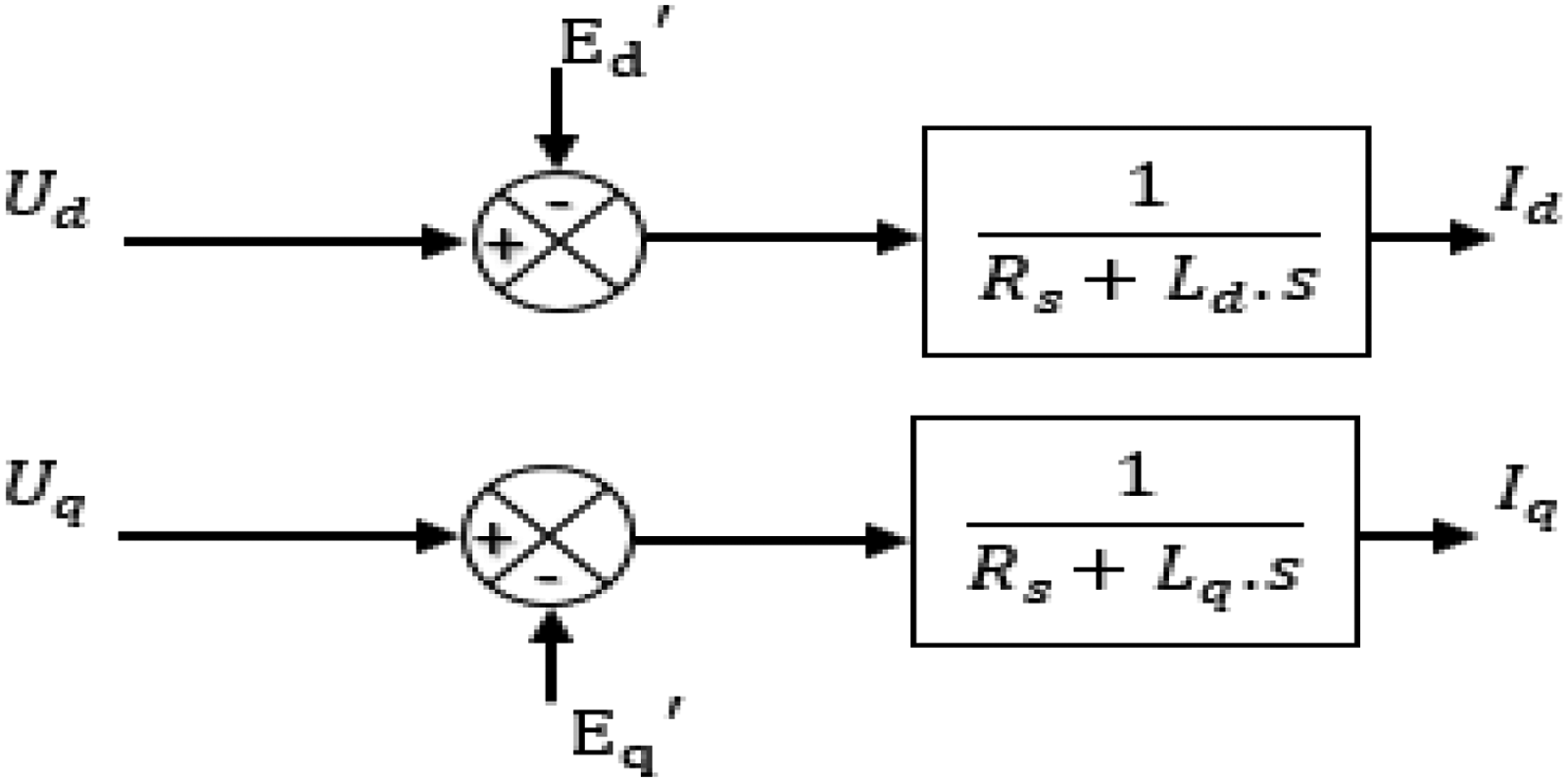
Current loop coupling.

Decoupling control.
Using Eq. 1 and Eq.11 becomes:

After using the decoupling method, Eq.12 becomes:

Using Laplace transform:

Where
According to Eq.14, the coupling design may be defined as:
The voltages produced by the VSI may be chosen as:


Finally, LPMSM may be acquired by a FOC-based PI regulator:

Where
Depending on the closed loop and stabilization condition for the system in the first order, the PI gains can be calculated as below:

An outer and inner loop dependent on the PMSM's speed and current loops represents the sequential control structure on which FOC is dependent, making control application easier. Because of the nonlinearity of the torque of the PMSM and the difficulty in meeting the requirement to regulate the torque at a wide dynamic speed and high range, this sequence based on classical control, however, gives only limited advantages. The traditional FOC control is hybridized with a nonlinear control based on BSC to increase its endurance. BSC is done on the outer loop of the PMSM, while FOC is applied to the inner loop. Furthermore, by ensuring the stability of the PMSM control and enhancing its performance, hybridization also lessens the impact of varying the load torque compared to FOC control. The PMSM model, along with FOC, is depicted in Figure 4.
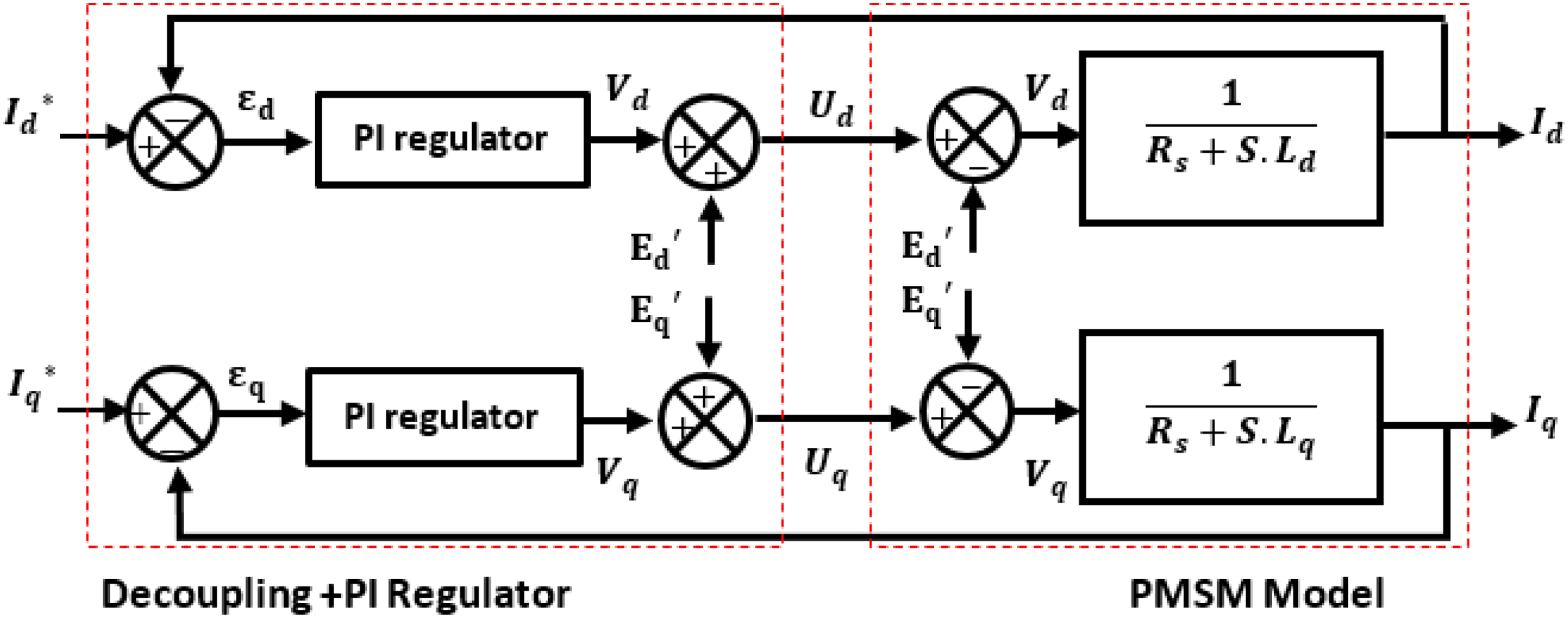
PMSM model based on FOC.
Novel control design based on SS-LQR for the PMSM current loop
An optimal control strategy is used in this study to achieve PMSM control based on the virtual inputs received from the BSC approach provided in the previous section. This method, called LQR control, makes use of an optimal control strategy to guarantee dynamic system control based on the system's linear state equation and a quadratic cost function that has been developed. The LQR approach is preferred in current control theory because of its robustness against uncertainties and disturbances in dynamic systems, as well as its efficiency, leading to optimum system performance. In addition, the LQR is a key component in numerous techniques with closed-loop features. It can be categorized as a viable option to associate the enhancement of performance characteristics and control of systems under uncertainties and instabilities due to the properties of the LQR technique (Cheema et al., 2016; Ha & Giang, 2023; Li et al., 2018; Mebkhouta et al., 2024b; Nicola & Nicola, 2020; Sun et al., 2019). To implement the LQR control, the system should be designed using the state space method (SSM) as:

The PMSM current loop model is constructed by combining the linear model with the uncertainties. To do this, the closed loop based on the novel control architecture is implemented using decoupling compensation.
The disturbances are articulated in (11), and the system linear model is formulated as:

The model is in full state, which means the output is represented in (21):

Where,
Study controllability of the SSM of PMSM decoupling
To apply any control based on the state space model, we must study the controllability of state space. We say that the state space is controllable if the rank (r) equals the degree of the system's order (n), the controllability matrix given in (22) (Ding et al., 2022):

For the second order, the controllability matrix is:


The rank of
Analyze LQR control based on full-state feedback
LQR control strategy is widely used for MIMO systems and is based on state feedback to regulate the system input through the calculation of a gain matrix (k). Its primary objective is to minimize a cost function composed of two critical components: the first ensures system performance and stability, determined by the weighting matrix Q, while the second focuses on minimizing control energy consumption, governed by the weighting matrix R (Cheema & Fletcher, 2020). The LQR technique is enhanced by incorporating the dynamic error of the direct and quadrature currents into the state-space representation to achieve optimal performance and eliminate steady-state error in the control system. This modification transforms the conventional LQR into a steady-state LQR (SS-LQR) controller by augmenting the state vector with the dynamic errors of the stator current components. The augmented cost function penalizes deviations in system states and control efforts while driving the dynamic current errors to zero, thereby ensuring the elimination of steady-state error. Consequently, minimizing this cost function yields an optimal control law that guarantees system stability, efficient energy utilization, and zero steady-state error for step or constant reference inputs.
The cost function is expressed as:

The feedback control law for state space may be given as:

Solving (26) using the Algebra Riccati Equation as:

The system in (20) and (21) is a MIMO system, and this paper presents the type-0 MIMO servo system in the state space model presented in Figure 5.
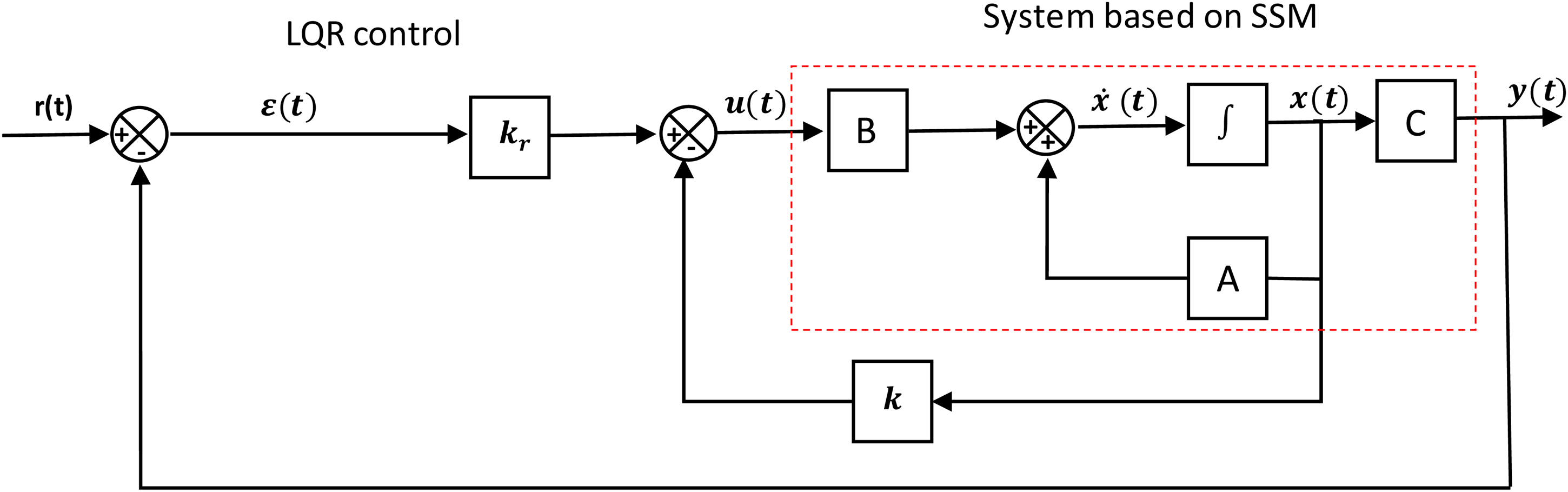
Type-0 servo system based on full state feedback.
Study the steady-state design-based LQR for the PMSM current loop
In this part, we will improve the performance characteristics of the internal linear model, and that's by adding a new variable, the error of the variable state. Therefore, the new state space model is defined as:

The law of feedback control can be provided:

The new state space model provides in (30):

Where i is the identity matrix
The objective of the revised internal linear model, grounded in the state feedback law, is to eliminate steady-state errors and ensure that the system's tracking is asymptotically stable, implying that x(∞), ε(∞), and u(∞) converge to constant values. Furthermore, the steady state of (28) is delineated as:

The reference vector represents the step vector, which indicates that:

After that, the error dynamics are subtracted between values (t) and values (

We put:

Where,
To track a constant reference:

From (33) and (34), we have :

After that, the error vector is represented in (37):

From (36) and (37), the error dynamic is represented as:

Where:

Where
However, from (38) and (39) the closed loop dynamic error is designed as follows:

Stability study of the LPMSM plant
A pole-zero map analysis was performed using MATLAB to assess the stability of the LPMSM plant. In this setting, the straight and quadratic axes delineated in (20) and (21) have been recognized as distinct subsystems. The stability has been established by the aforementioned approach, as seen in Figure 6, which indicates that the poles are located on the negative side of the map and possess significant absolute values.
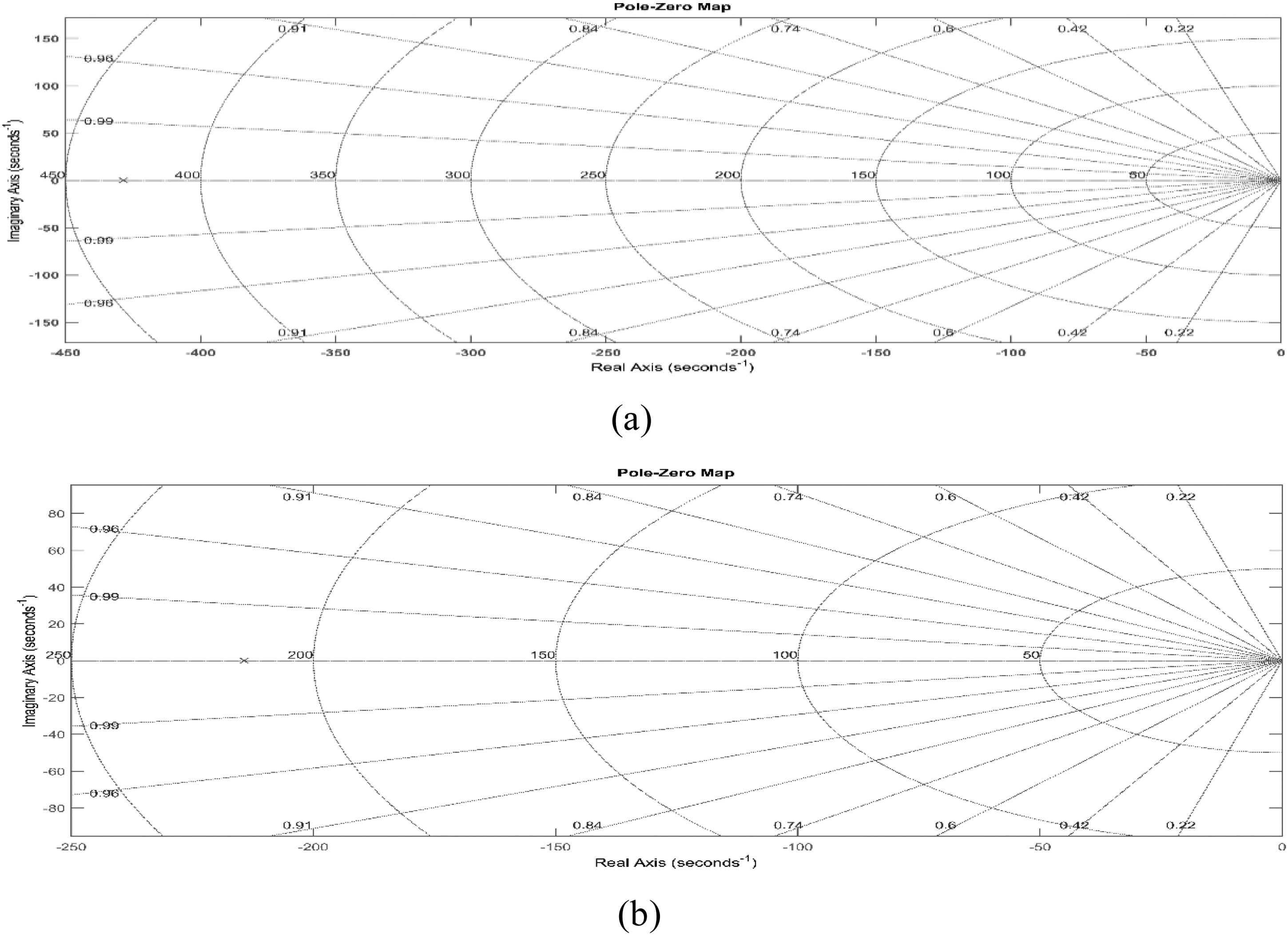
Stability analysis of PMSM plant utilizing pole-zero map method (a) direct-axis (b) quadratic-axis.
Controllability to the dynamic error
Since the error dynamics presented in (38) are of the 4th order, the controllability matrix is depicted as follows:

Hence:
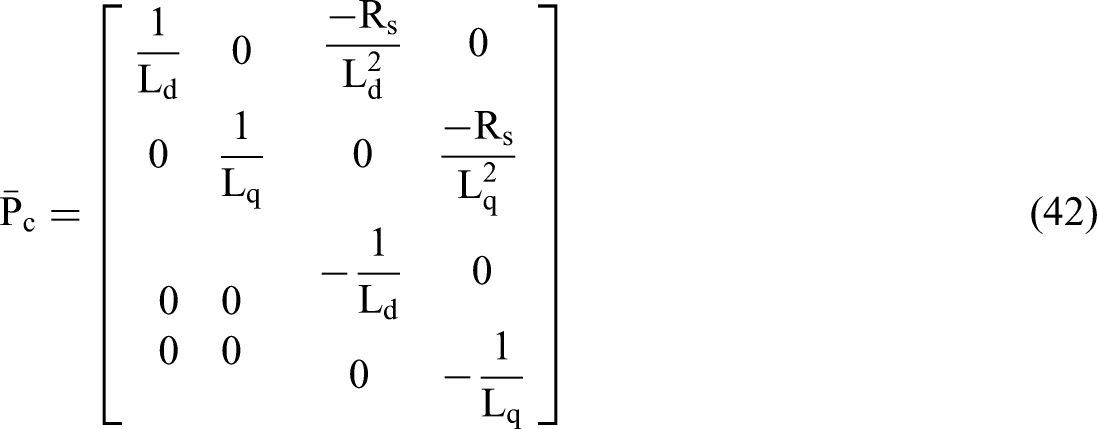
The rank of Pc is 4, which corresponds to the system in (38). This indicates clearly that the dynamic error of (38) is always controllable for overall values of the inputs
Design of the optimal gain matrix the state feedback law
The direct and quadratic currents are independent of one another in (20) and (30); for this reason, Figure 7 elucidates this decoupling using optimum LQR management, whereby the linear state feedback rule is formulated as:

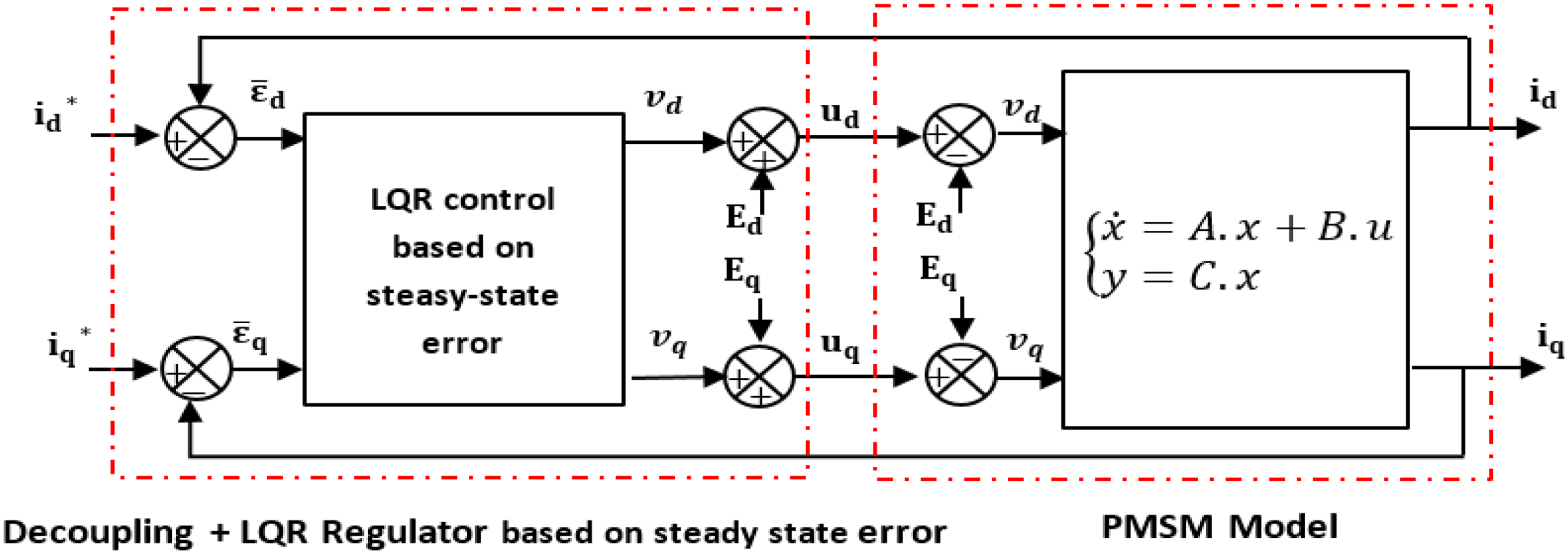
PMSM's decoupling model-based optimal SS-LQR control.
Where the gain matrices

Where

Stability proof
To demonstrate the stability of the SS-LQR for the PMSM current loop, we should study the eigenvalues in the closed loop system (PMSM's current loop + SS-LQR) that is designed in Figure 7. Therefore, depending on the feedback control of (40), the eigenvalues are designed as:

Using MATLAB, the eigenvalues have been calculated as follows:

Because the eigenvalues are identified by a negative value and estimated at very large absolute values, the proposed control has demonstrated its effectiveness for the PMSM current loop.
The flowchart illustrating the proposed hybrid control technique's workflow is shown in Figure 8.
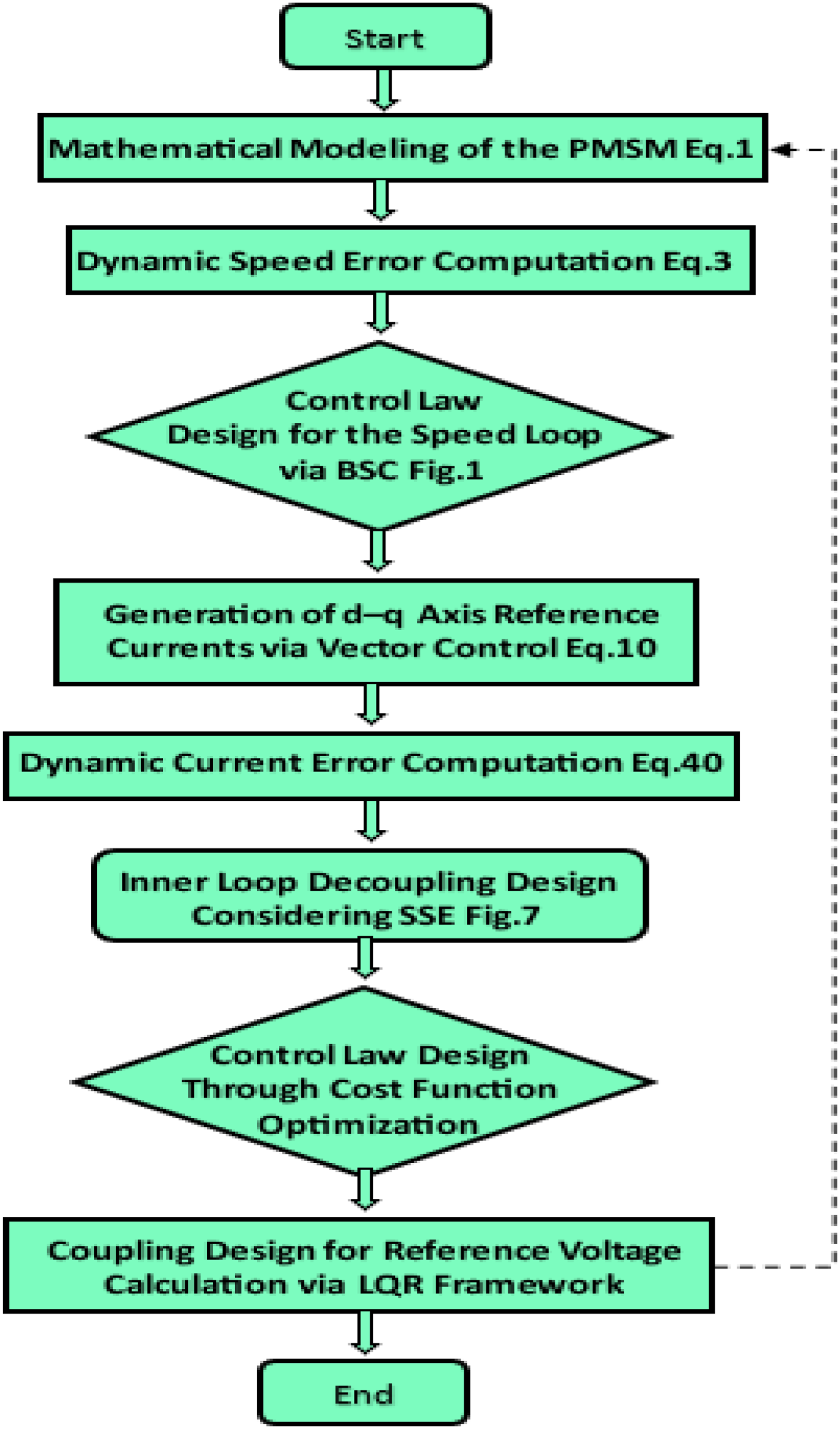
Flow chart of the proposed BSC-LQR.
Simulation results and discussion
This paper presents a hybrid control combining BSC and LQR approaches, key vector control components used in PMSM. The PMSM model has been divided into two loops, namely the speed and current. The speed loop is designed as a single-input and single-output system. Given that the quadratic current is directly proportional to the electromagnetic torque, the reference quadratic current serves as the input to the speed loop, while the speed constitutes the output of the speed loop. Based on this design, we applied the BSC to the speed loop to calculate the reference quadratic current by regulating the speed error using the stability method (Lyapunov), which is considered the main objective of the BSC. As for the current loop, we are using the decoupling strategy in this loop to decouple the linear model of the PMSM with disturbances, as explained in the 4th section. This loop has been designed to be MIMO, where the inputs are the direct and quadratic voltages, while the outputs are the direct and quadratic currents. In addition, direct and quadratic currents become state variables using the full-state space model. Furthermore, in the presented hybrid control, the error was added as a state variable with the application of the state feedback law, and the addition aims to improve the performance of PMSM by reducing the steady-state error and giving better performance characteristics. Based on the hybrid control presented in this article, the PMSM control's block scheme, illustrated in Figure 9, was simulated using Simulink's MATLAB. Some scenarios are presented to prove the proposed control's effectiveness. The design parameters were selected based on a thorough analysis of PMSM performance using several criteria: stability, performance characteristics, robustness, cost function, and energy minimization. Through (Karboua et al., 2023), PMSM parameters were chosen, which are presented in Table 1. BSC gains defined in (10) were identified using the stability condition through the Lyapunov function. In contrast, LQR gains (K and Kr) were determined by the cost function (J), where R and Q were identified to improve energy and performance, respectively. Table 2 illustrates the value of the BSC, FOC, and LQR gains. We also considered PMSM operating conditions to ensure a comprehensive and effective control scheme. Moreover, we recognize that parameter selection is a crucial aspect of control system design, and we are actively exploring avenues for optimization. Therefore, sensitivity analysis assessed the impact of variations in each parameter, such as Rs, Ld, Lq, and j, on the overall system performance. Our results indicate that the control scheme remains effective within a reasonable range of parameter values.
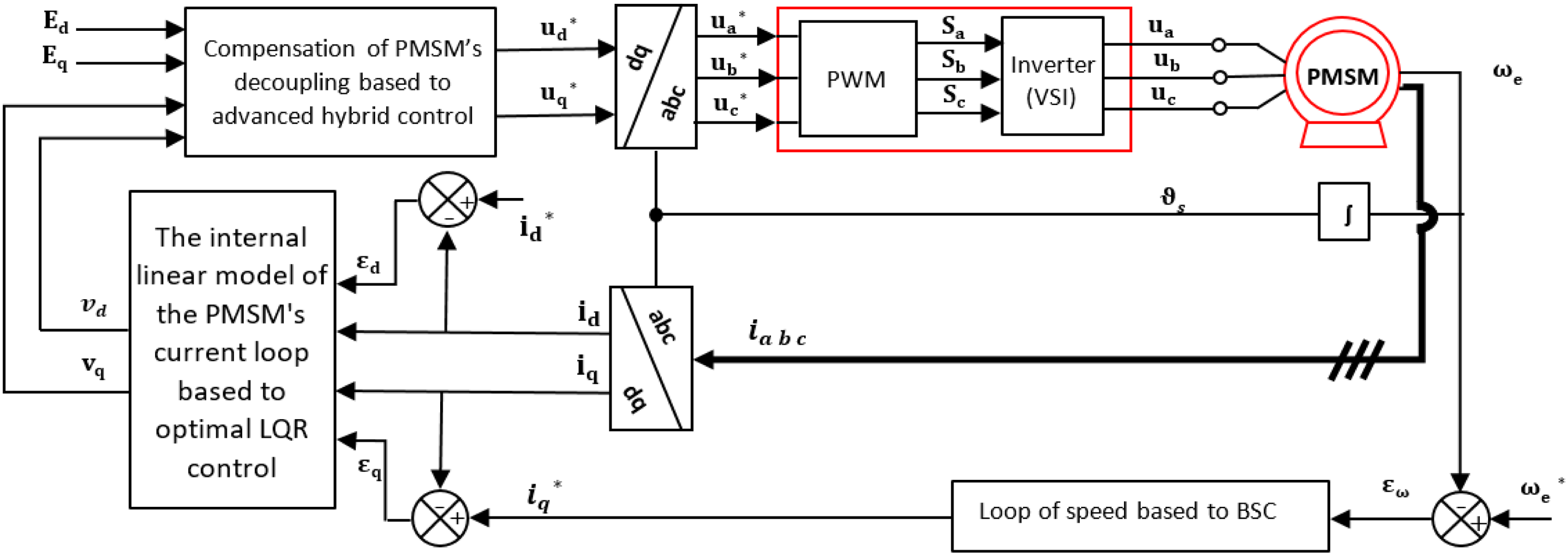
PMSM control scheme based on BSC and LQR.
PMSM parameters of (karboua et al., 2023).

The parameters of the designed controller.

Start-up of the PMSM under loads
Applying or changing the load torque of the PMSM causes a disturbance, affecting the speed performance of the PMSM. Therefore, the proposed control is presented to reduce this effect, and the first scenario of the simulation shown in Figure 10 demonstrates the efficiency of the proposed control. The load torque is changed between 0 and 5 and 10 N.m. in different instances; however, the results show good performance. Through Figure 9(a), the speed is stabilized to the value of 100 rad/s with a little overshoot to 2%, an undershoot to 1%, a small steady-state error, which is estimated at 0.5%, and a very short settling time of less than 5 ms. In addition, the d-q currents, a, b, and c currents, and electromagnetic torque are stable to a small tolerance band, as demonstrated in Figure 10(b), 10(c), and 10(d), respectively.
PMSM performance under speed variation
A change in the PMSM's normal speed between low speed (10 rad/s), stop (0 rad/s), and reverse rotation (−100 rad/s) greatly affects its performance characteristics, showing many problems, including overshoots, undershoots, large steady-state errors, etc. This scenario is often regarded as one of the most challenging in demonstrating the efficacy of the implemented control measures. In this article, the efficiency of the control was confirmed by applying this scenario, and this is demonstrated by the results presented in Figure 11, which give good results and less impact on the performance of the motor, as the response time of the speed between the low, zero, medium, and reverse rotation speeds is low. The steady-state error is almost non-existent to them, completely stable under the influence of speed change, as represented in Figure 11(a). Moreover, the LQR technique based on steady-state error contributed to reducing the tolerance band for both the electromagnetic torque (d-q) and a, b, and c currents, and these results have been proven in Figures 11(b), 11(c), and 11(d), respectively.
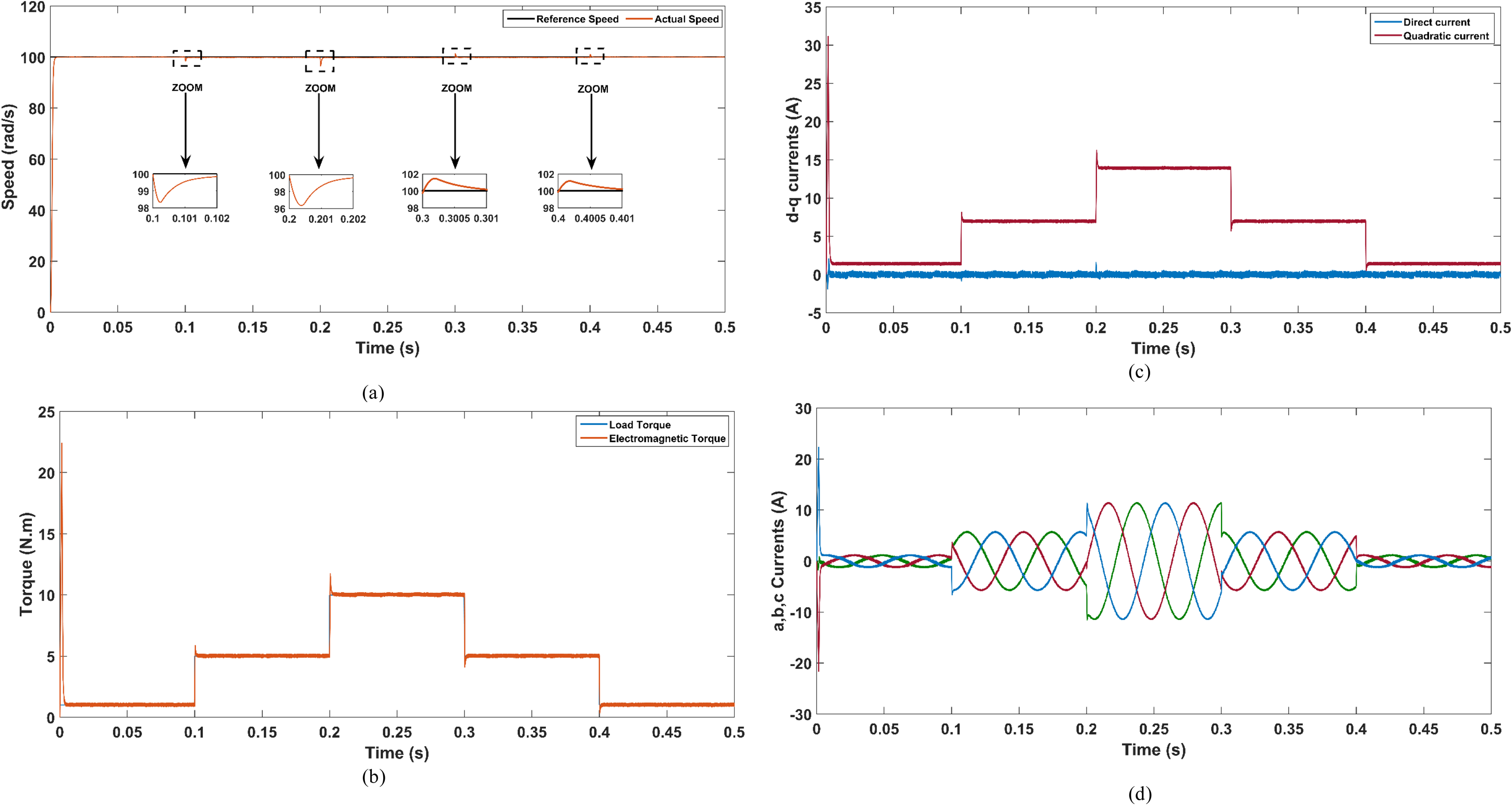
Initial scenario (a) speed (b) electromagnetic torque (c) d-q currents (d) abc currents.
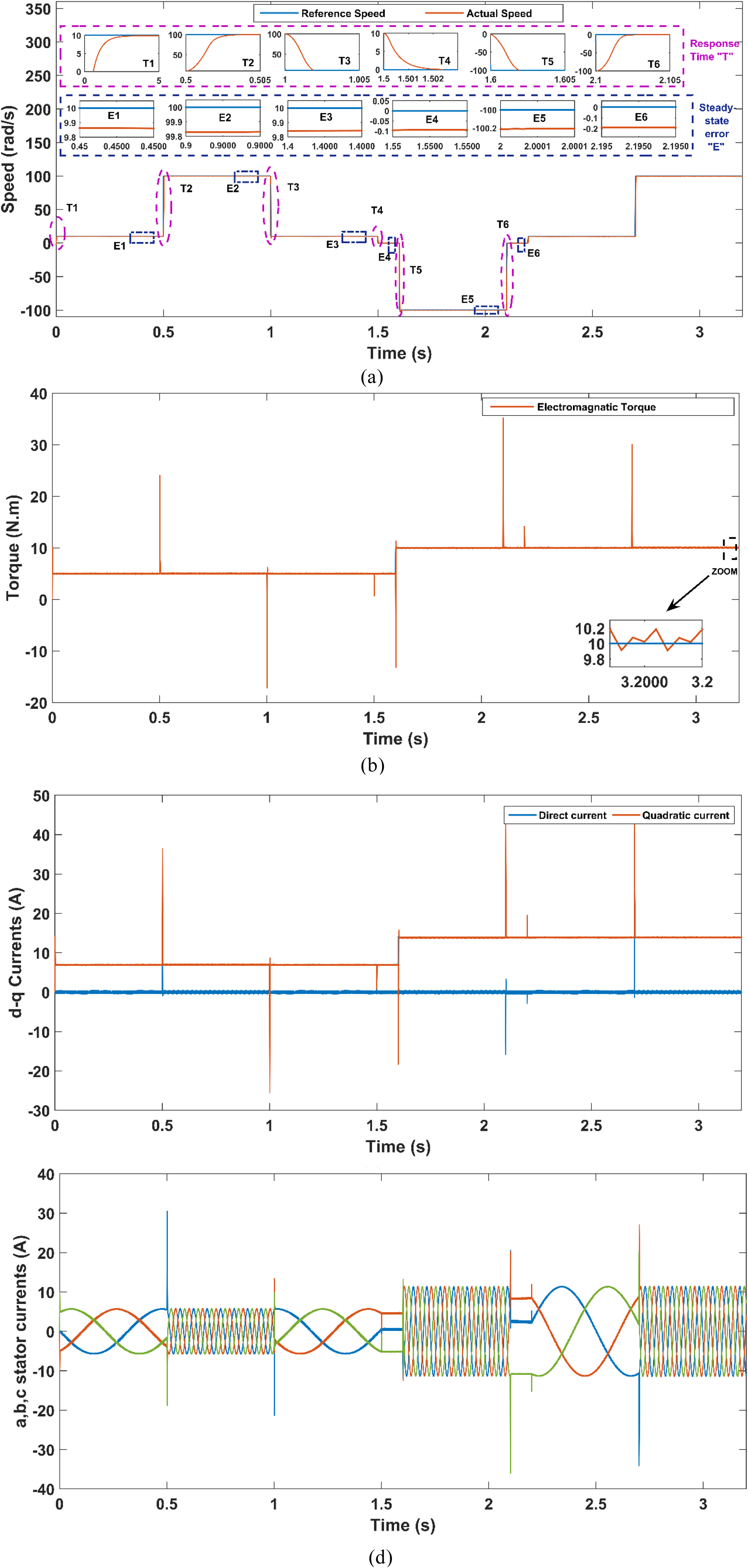
Second scenario (a) speed (b) electromagnetic torque (c) d-q currents (d) abc currents.
Robustness test
Parameter variations, or uncertainty, may significantly impact the performance of a PMSM owing to internal and external operating circumstances. These parameters are stator resistance, stator inductance, and inertia value. To test the robustness of the proposed control in this paper, the change of these parameters was studied at ±50%, and +100% with the change of load torque from 5 to 10 N.m. at 0.25 s. The results shown in Figure 12 show that the proposed control is robust and is affected negligently. Meanwhile, in Figure 11(a), it is clarified that the speed performance in this test is stable at 100 rad/s with a good response time of 4 ms, with the appearance of a very small overshoot estimated at 1%. As for the performance of the electromagnetic torque, d-q currents and a, b, and c currents have good characteristics with very little change, as shown in Figures 12(b), 12(c), and 12(d), respectively. Moreover, the steady-state error is minimal and is only slightly affected by uncertainty.
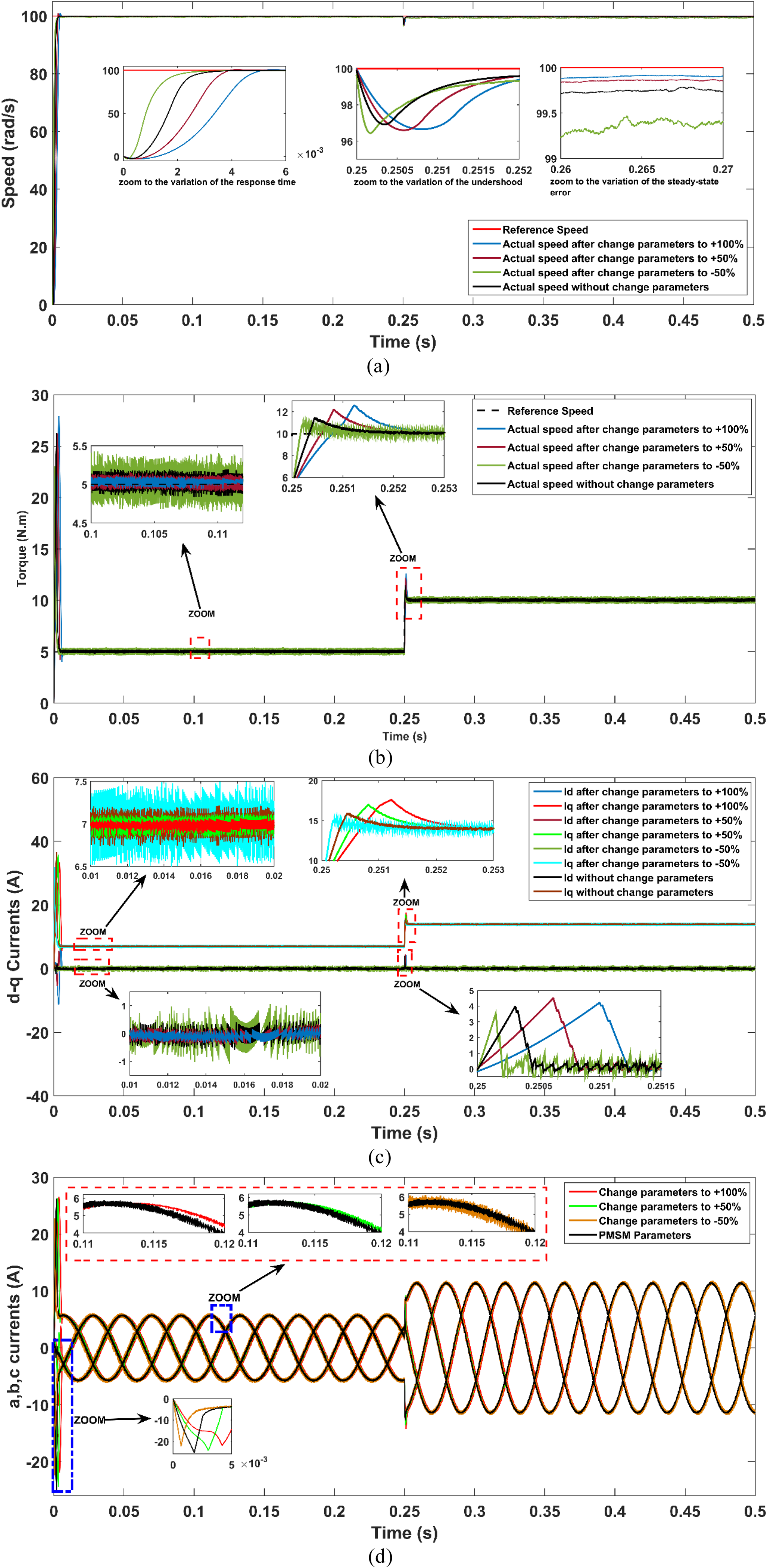
Third scenario (a) speed (b) electromagnetic torque (c) d-q currents (d) abc currents.
Comparative study: Proposed control vs. modern techniques condition
This section assesses the efficacy of the proposed BSC-LQR controller in comparison to two sophisticated modern control techniques: ERL-SMC and MPC. The comparison illustrates the advantages of the suggested controller relative to existing current strategies. Figure 13 illustrates the system's performance across different speed and load situations, providing a thorough evaluation of the BSC-LQR controller's efficacy.
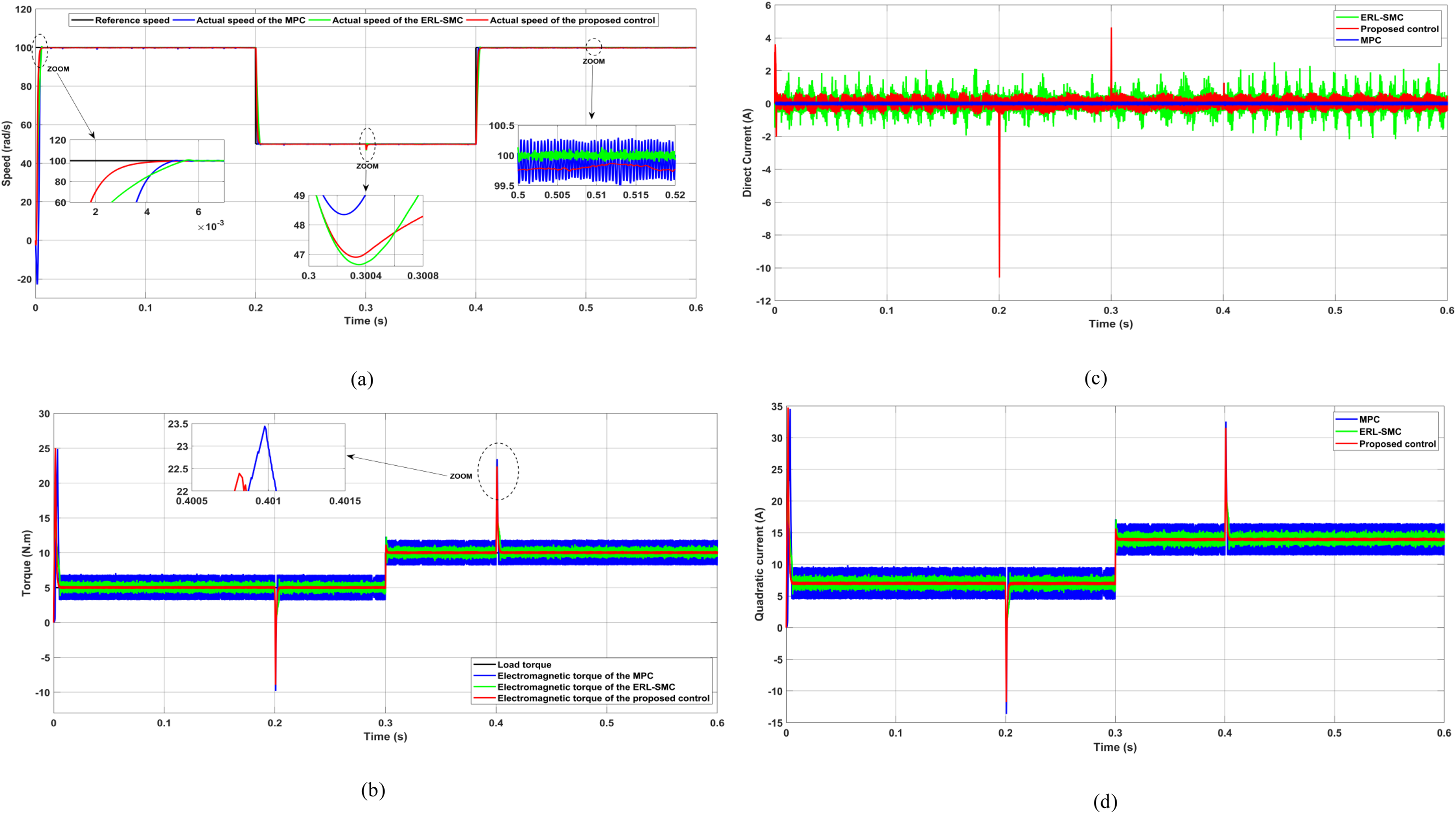
Comparative study (a) speed (b) electromagnetic torque (c) direct current (d) quadratic current.
In this scenario, the speed of the PMSM varies from 100 rad/s to 50 rad/s, then back to 100 rad/s, while the load torque is stepped from 5 N·m to 10 N·m at t = 0.3 s. As shown in Figure 13(a), although MPC demonstrates robustness during the application of load torque, it suffers from noticeable drawbacks in both dynamic and static regions such as longer rise time, steady-state error, and chattering in the speed response. On the other hand, ERL-SMC provides better static behavior with reduced steady-state error, but its dynamic response lags behind that of MPC, exhibiting slower adaptation during transients.
In contrast, the proposed control strategy successfully mitigates the limitations observed in both MPC and ERL-SMC, offering superior performance in both dynamic and static regions. It ensures a faster dynamic response with minimal overshoot and shorter rise time, while maintaining excellent steady-state behavior with negligible speed ripple and improved robustness under load changes. This clearly validates the proposed controller's capability to regulate PMSM speed under complex and demanding operating conditions efficiently.
Regarding the electromagnetic torque, Figure 13(b) shows that the proposed control achieves significantly smoother torque with reduced ripple and minimal overshoot, especially during speed transitions, compared to both modern techniques.
Furthermore, the proposed control exhibits a narrower current tolerance band in both direct and quadrature currents, indicating better current regulation and less variation under dynamic conditions. In contrast, both MPC and ERL-SMC suffer from larger current deviations, reflecting inferior control precision. A minor drawback of the proposed method is the appearance of transient peaks in the direct current during simultaneous speed and torque changes, though these are significantly less severe than the issues observed with the other techniques.
This scenario confirms that the proposed control strategy provides a more balanced and reliable solution for PMSM drive systems, outperforming both ERL-SMC and MPC in terms of speed tracking, torque regulation, and current stability.
The results presented in Figure 14(a), 14(b), and 14(c) illustrate the stator current performance under the three control strategies: the proposed control, MPC, and ERL-SMC. These figures emphasize the clear advantage of the proposed controller in maintaining high current stability and minimizing the tolerance band during dynamic operating conditions. Specifically, the proposed control demonstrates a significantly narrower current tolerance band, reflecting its superior ability to tightly regulate the stator currents despite speed variations and load disturbances. In contrast, both MPC and ERL-SMC exhibit larger fluctuations in current waveforms, particularly during transitions. The high stability and precision of the proposed control method in managing current dynamics reaffirm its effectiveness, as previously observed in the speed and torque responses. These findings validate the robustness of the proposed strategy in ensuring efficient and stable PMSM operation, even under challenging transient scenarios.
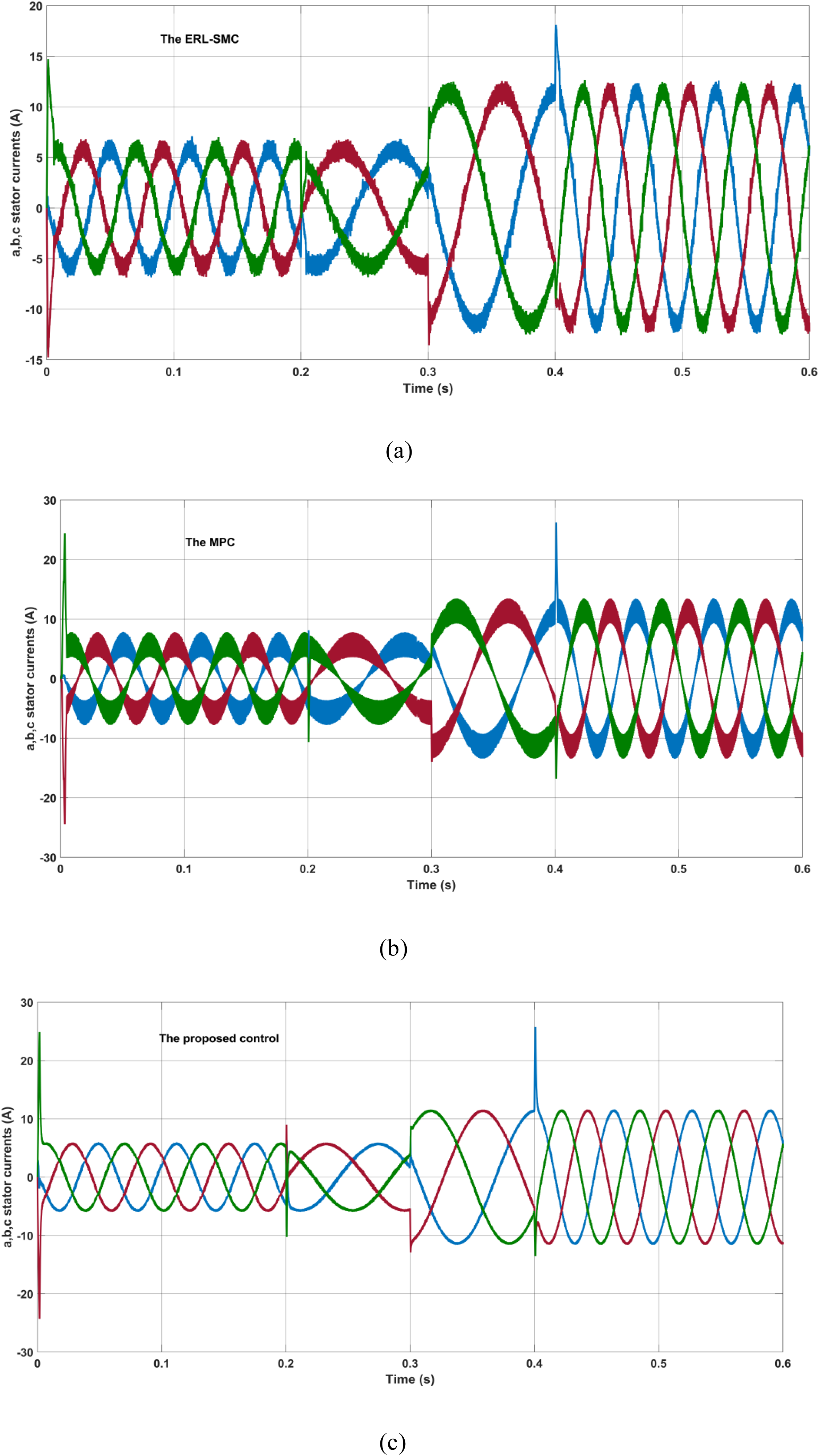
Comparative study (a) abc currents based on the ERL-SMC (b) abc currents based on the MPC (c) abc currents based on the proposed control.
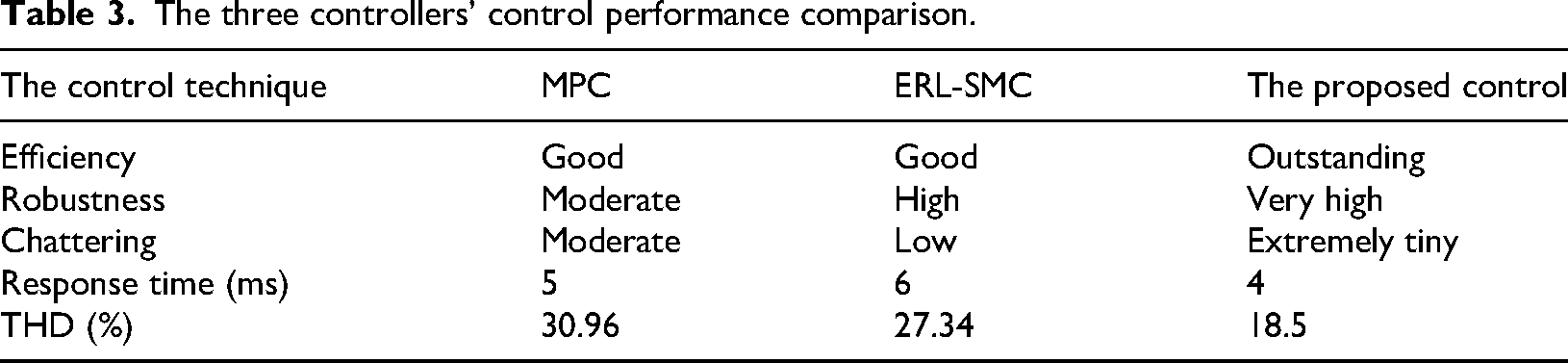
The proposed control strategy demonstrates superior dynamic and static performance, along with enhanced robustness against parameter variations and load disturbances. These strengths are clearly evidenced in the simulation results, particularly under variable speed operating conditions. The effectiveness of the proposed method is further validated through a detailed harmonic analysis of the stator current, as shown in Figure 15. The Total Harmonic Distortion (THD) achieved by the proposed control is significantly lower, reaching just 18.5%, indicating a much cleaner current waveform and reduced associated losses. In comparison with advanced control methods, the proposed strategy outperforms both MPC and the ERL-SMC, which yield THD values of 30.96% and 27.34%, respectively. These results highlight the proposed method's advantage not only in the time domain response but also in terms of power quality. A comprehensive summary of the performance metrics across the modern controllers MPC, ERL-SMC, and the proposed method is presented in Table 3, providing a clear quantitative comparison that emphasizes the contributions of the developed control approach.
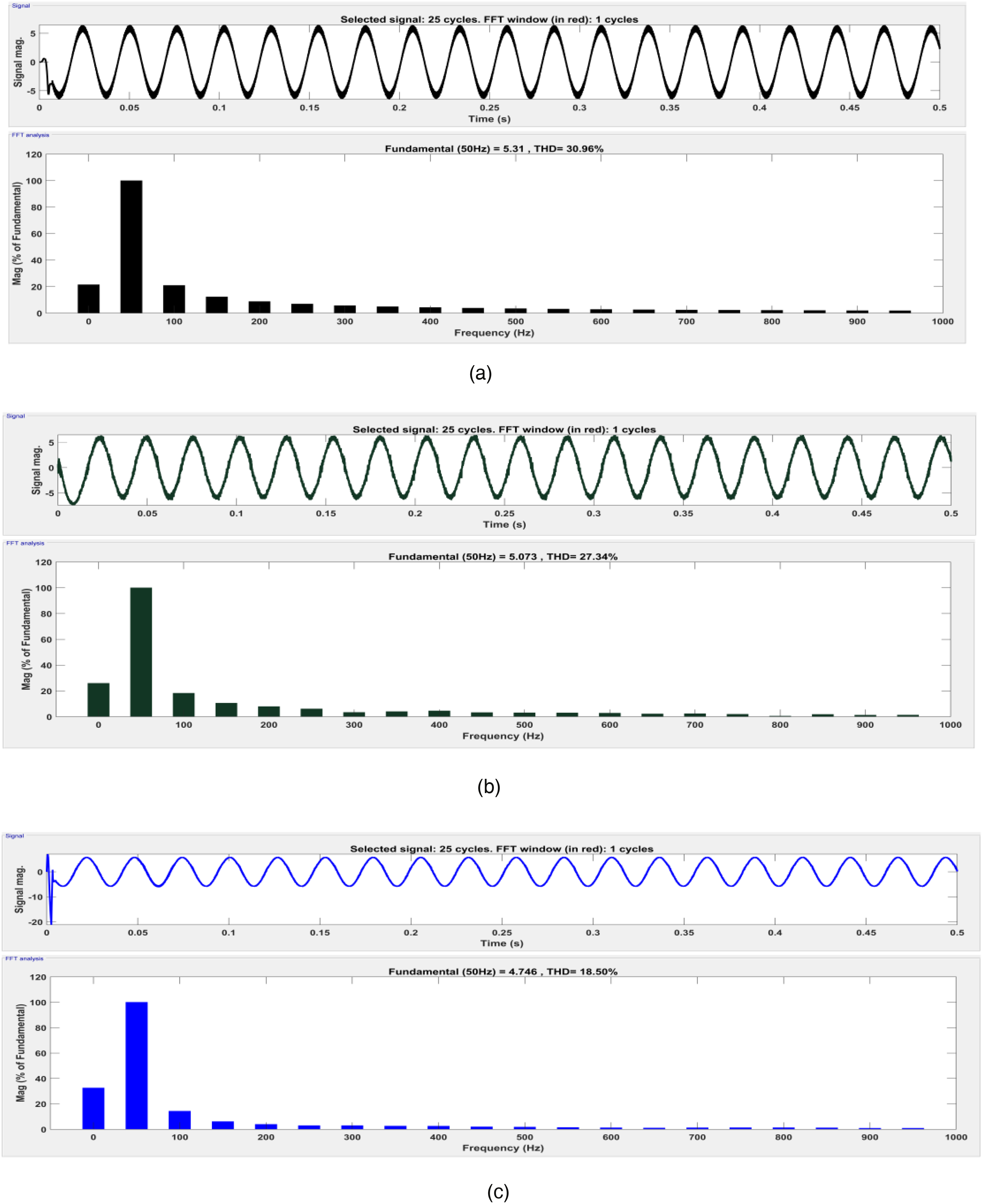
Current harmonic analysis (a) MPC (b) ERL-SMC (c) the proposed control.
The three controllers’ control performance comparison.
Conclusion
In this article, we contributed to developing the performance of a PMSM using a hybrid advanced control between a nonlinear BSC and a novel design-based LQR technique. Firstly, an efficient BSC was applied to the loop of speed. Secondly, PMSM's internal linear model control based on a novel LQR control was presented; moreover, the error was added as a state variable to minimize and stabilize the steady-state error. After that, the hybrid advanced control gave the motor good performance due to the LQR control based on steady-state error, which relied on the cost function on two basics: the optimization of performance and minimization of energy, and the nonlinear control based on the BSC using the stability theory of the Lyapunov candidate function. Comparisons were made between the hybrid control offered and ERL-SMC and MPC to show the effectiveness of the control approach. The comparisons demonstrate the superiority of the suggested method in certain control indices and power quality concerns. Finally, results show the validity, robustness, efficiency, and practicability of the control of PMSM based on the presented control design.
Footnotes
Funding
This research was funded by Princess Nourah bint Abdulrahman University Researchers Supporting Project number (PNURSP2025R827), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia
Deanship of Scientific Research, Princess Nourah Bint Abdulrahman University, (grant number PNURSP2025R827).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.