
Abstract
Electric vehicles (EVs) are pivotal in future transportation due to their energy efficiency and environmental sustainability. However, their stochastic load characteristics on the radial distribution network (RDN) pose challenges such as power quality issues and increased network losses. This paper proposes an approach to strategically deploy EV charging stations (EVCS) integrated with photovoltaic (PV) units in RDN. The main objective is to reduce real power loss and enhance the reliability indices. The scenarios that include and exclude PV units have been considered to analyze the impact of introducing PV in the RDN with different EVCS loads. The capacity of the PV unit has also been optimized in this work. The proposed methodology has been assessed by using the IEEE 69 bus RDN. The IEEE 69 bus RDN has been divided into four zones and each zone consists of one EVCS and one PV to ensure widespread charging facilities and improve the network performance. The backward forward sweep power flow technique has been applied to perform the analysis by considering the variable parameters of the electrical system. The issues have been framed as an optimization task and tackled by applying the symbiotic organisms search technique. The outcomes have been compared with Grey Wolf Optimizer, particle swarm optimization (PSO), and whale optimization algorithm (WOA) to validate the effectiveness of the optimal planning to allocate the EVCS and PV units. The methodology is validated through multiscenario optimization on the IEEE 69-bus system and a case study-based static and dynamic simulation on the IEEE 13-bus feeder. These simulations, conducted using MATLAB and OpenDSS, confirm both the steady-state accuracy and the real-time operational feasibility of the proposed planning strategy.
Keywords
Introduction
The current transport system heavily relies on fossil fuels, contributing to environmental damage through greenhouse gas emissions (Aftab et al., 2018). As the world expands, there is an urgent need for new, sustainable transportation methods (Chakraborty et al., 2024). Electric vehicles (EVs) have emerged as a cleaner, more energy-efficient alternative to traditional cars, driving the shift toward sustainable transport (Tappeta et al., 2022). However, challenges like power demand imbalances, increased grid load, and lower network reliability must be addressed (Bilal et al., 2021; Archana and Rajeev, 2020). A strong EV charging infrastructure is crucial for supporting EV adoption. Additionally, the integration of distributed generation (DG), such as photovoltaic (PV) units into the radial distribution network (RDN) can cause reverse power flow and voltage issues if not managed properly (Kathiravan and Rajnarayanan et al., 2023).
Over the past decade, research on the optimal placement and power management of EV charging stations (EVCS) within the electrical grid has garnered increasing attention. Studies have extensively examined factors such as driver convenience, accessibility, and strategic distribution of EVCS along key transportation routes to enhance usability and efficiency (Lam et al., 2014). The configuration and sizing of EVCS in residential, industrial, and commercial zones were comprehensively analyzed in Zeb et al. (2020), addressing spatial and energy demand constraints. To improve the reliability of RDN and minimize maintenance-related failures, an advanced methodology was introduced in Canizes et al. (2017). Practical solutions for maximizing EVCS accessibility through intelligent placement strategies were proposed in Chakraborty et al. (2022). Fredriksson et al. (2019) focused on the route node coverage problem, identifying the minimal number of charging stations required for optimal geographic coverage while maintaining the system efficiency. Several studies have explored the interdependencies between transportation and power grids, highlighting their mutual impact on energy distribution and demand response (Sadhukhan et al., 2022). Research has also investigated optimal EVCS placement strategies to enhance system controllability and improve grid stability (Gao et al., 2020). Moreover, algorithms for energy optimization and charge scheduling have been developed to ensure cost-effective and balanced EV charging operations (AbuElrub et al., 2020; Parastvand et al., 2020; Ustun et al., 2018). Furthermore, various soft computing techniques, including metaheuristic algorithms and artificial intelligence-based approaches, have been applied to solve the EVCS allocation problem efficiently (Aljanad et al., 2018; Ahmad et al., 2023; Mishra et al., 2024; Shaaban et al., 2019). These advanced methodologies offer promising solutions to optimize EV infrastructure deployment, reduce grid stress, enhance the overall sustainability of electric mobility networks and offer novel uses in times of emergencies (Hussain et al., 2020).
Zhang et al. (2025) proposed an optimized charging schedule for battery electric buses incorporating PV and energy storage systems (ESS) to minimize the peak loads and overall system costs. The model was validated using a real-world bus network, demonstrating significant economic and environmental benefits. The research in Demirci et al. (2025) examined the potential for EVCS to achieve carbon neutrality by integrating solar renewables and ESS. The findings indicate that grid dependency can be reduced by 54.3%, while emissions decreased by 25.55%, though achieving complete carbon neutrality remains challenging due to space and cost constraints. A techno-economic analysis of photovoltaic-powered EVCS along highways, utilizing HOMER software for optimal site selection and capacity planning has been carried out by Alhazmi (2025). The results showed that a 500 kW station was the most efficient, capable of charging up to 65,758 vehicles annually, highlighting the feasibility of solar-powered EV infrastructure in high irradiance regions. Gupta et al. (2025) developed a grid-aware scheduling and control framework for EVCS, integrating a day-ahead dispatch plan with real-time model predictive control. The experimental validation demonstrated that the proposed approach enhances grid stability and minimizes power imbalances, making it a viable solution for smart grid integration. The study by Hasani et al. (2025) proposed an integrated energy management system for smart microgrids, incorporating EVCS, demand response programs, and power-to-gas technology. The proposed model achieved a 6.43% reduction in operational costs and an 8.21% decrease in emissions, demonstrating its potential for enhancing microgrid sustainability.
Most of the literature emphasizes reducing power loss and improving the RDN parameters. Reliability has been often evaluated in scenarios involving increased load. However, there is a lack of consideration for simultaneously minimizing both reliability parameters and losses. Studies such as (Chatuanramtharnghaka et al., 2024; Mazumdar et al., 2023) have explored EVCS–DG coordination and energy scheduling using metaheuristic techniques. Building on these, the present work incorporates a broader multialgorithm analysis with the system average interruption duration index (SAIDI) as a core planning metric, and focuses on system-wide EVCS–PV integration at the utility distribution level. There is also the issue of limited accessibility to EVCS as most of the research does not ensure dividing the RDN to ensure the widespread allocation of EVCS to satisfy the needs of EV users.
The major contribution of this work is summarized below.
The proposed work offers an innovative method to optimally place EVCS integrated with PV units in IEEE 69 bus RDN. The IEEE 69-bus RDN has been divided into four zones, with each zone featuring one EVCS and one PV unit to provide widespread charging access for EV users. The influence of placing PV-integrated EVCS in the power system parameters of IEEE 69 bus RDN has been analyzed. The optimization of PV unit capacity has been carried out in this work. The real power loss (RPL) and SAIDI have been simultaneously minimized while optimally assigning the PV-integrated EVCS. The symbiotic organisms search (SOS) tool has been utilized to determine the optimal solution. The obtained results have been compared with Grey Wolf Optimizer (GWO), particle swarm optimization (PSO), and whale optimization algorithm (WOA) techniques to validate the optimal planning of EVCS integrated with PV units. A case study-based validation on the IEEE 13-bus feeder has been performed to examine both static and dynamic system behavior under EVCS–PV coordination, reinforcing the practical applicability of the proposed strategy.
The structure of the paper is outlined as follows: “Framework of mathematical modeling” section outlines the framework of mathematical modeling for the optimal allocation of EVCS integrated with PV units. “Optimization tools” section offers a thorough analysis of the optimization tools. “Experimental results and analysis” section deals with the experimental results and analysis and validates them against other optimization tools. It also includes case study-based validation on the IEEE 13-bus feeder using both static and dynamic simulations. The concluding remarks for the proposed work are discussed in the “Conclusion” section.
Framework of mathematical modeling
Formulation of the objective function
The key objective is to reduce the RPL and enhance the reliability indices by installing the EVCS at suitable positions and integrating them with PV. The SAIDI may rise if RPL is reduced, and vice versa. Using the SOS, GWO, PSO, and WOA tools, a multiobjective formulation is developed to minimize both the RPL and SAIDI simultaneously. The total RPL of RDN is computed as,

where

The RDN disruptions are caused by a sudden increase in load demand produced by the rapid charging of EVs. In this work, the SAIDI is used as a key performance indicator to assess network reliability. While the SAIDI is not a directly controlled variable, it is influenced by the operational conditions of the distribution system, which are affected by the placement and sizing of EVCS and PV units. These decisions impact power flow, voltage stability, and loading across the network. Such changes can lead to improvement or degradation in service continuity at load points, thereby affecting outage duration and unavailability parameters that define the SAIDI. It is computed by aggregating the total interruption duration experienced by each customer at a specific instant (Archana and Rajeev, 2021). Mathematically, it is expressed as,
The term

where

The entire objective function representing the biobjective formulation is represented as,

Equation (6) can be further simplified as,

where w represents the weightage number allocated to a single objective function in this study for obtaining the pareto optimal front solution.
Operating constraints
The following outlines the constraints related to the allocation of EVCS and PV within the RDN.


where

where

where

where
The active power injected by the PV must remain within specified limits.

where

where


where

where
Optimization tools
The working flowchart in Figure 1 outlines the suggested procedure for strategically positioning the EVCS and PV. The randomly positioned nodes represent the search agents responsible for locating the EVCS and PV. The optimization process for EVCS and PV components is implemented in a sequential manner for computational clarity. However, the evaluation of performance is conducted using a common biobjective function that considers both the RPL and SAIDI. Although EVCS and PV updates occur in successive steps, the impact of both is assessed together in the objective function. This ensures that the optimization process remains joint and coupled, even though the update mechanism is structured in phases. To calculate the objective function, the backward forward sweep power flow (BFSPF) technique of the RDN has been used, incorporating various constraints and IEEE 69 bus RDN data (Bilal et al., 2021). The position updates for EVCS and PV have been executed through the implementation of SOS, GWO, PSO, and WOA techniques. These optimization approaches contribute to the identification of optimal positions for the EVCS and PV placement in IEEE 69 bus RDN.
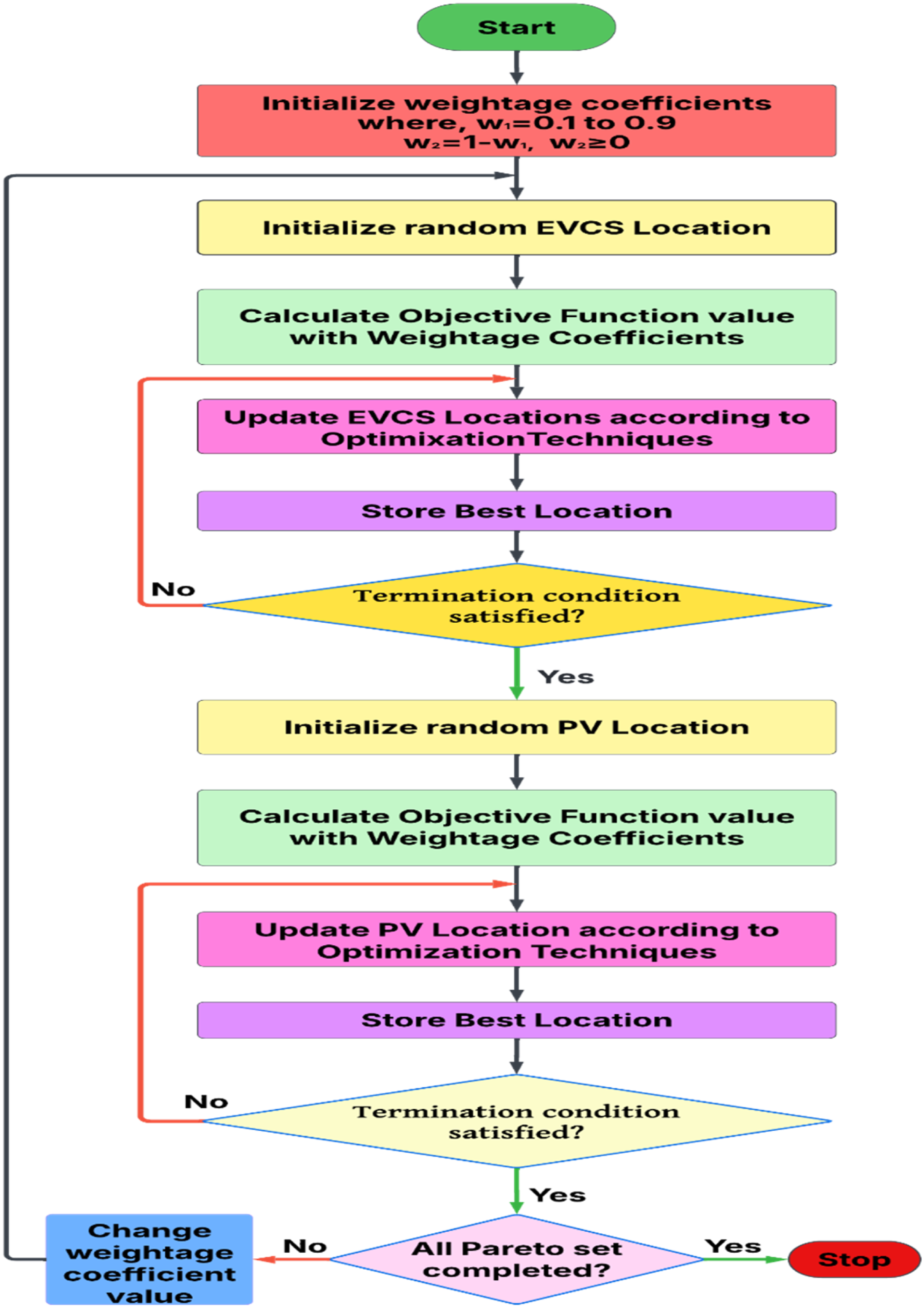
Operational flowchart for finding the optimal position of EVCS and PV using various optimization techniques.
Symbiotic organisms search algorithm
The SOS algorithm is a metaheuristic approach inspired by the natural symbiotic relationships observed between organisms in ecosystems (Cheng and Prayogo, 2014). It models the interactions between different organisms, such as mutualism, commensalism, and parasitism to optimize problem-solving processes.
Particle swarm optimization
The PSO is encouraged by the societal behavior of birds and fish, where individuals in a swarm collaborate to find the optimal solution (Abdolrasol et al., 2022). In this method, particles navigate through a search space, analogous to the exploration area, aiming to discover the optimal solution to a given problem. These particles exist in a multidimensional field and dynamically adjust their positions based on both their individual historical information and that shared with neighboring particles.
Grey wolf optimizer
GWO (Benamara et al., 2024) is encouraged by the social structure and hunting behavior of the grey wolves in the wild. The algorithm emulates the hierarchical leadership structure found in grey wolves which consists of four levels, that is, alpha, beta, delta, and omega. Alpha is the leader, responsible for making decisions about hunting and other activities. Beta is the second level, which helps the alpha and can assume its role if necessary and delta is the third level, responsible for supporting the alpha and beta wolves. Omega is the lowest ranking, which follows the other wolves.
Whale optimization algorithm
The WOA (Kar et al., 2024) is a metaheuristic algorithm inspired by nature that is based on the social actions and hunting strategies of humpback whales, particularly their technique of bubble-net feeding.
Experimental results and analysis
Simulation environment and modeling approach
All simulations and optimization routines for the IEEE 69-bus system were conducted using MATLAB R2023a. The IEEE 69-bus RDN was modeled using a custom-coded algorithm to calculate power system network parameters. The biobjective optimization problem involving the RPL and SAIDI was solved using four metaheuristic techniques, that is, SOS, PSO, GWO, and WOA, each implemented in MATLAB and linked to the BFSPF solver. Each simulation scenario was evaluated by iteratively calling the solver to compute objective values for different placements of EVCS and PV units. The complete simulation framework, including objective evaluation, constraint handling, and solution visualization (e.g. Pareto fronts), was built and executed in MATLAB on a Windows 10 desktop with 8 GB RAM and an Intel Core i5 processor with a clock speed of 2.40 GHz. This ensures that all results, including voltage profiles, convergence curves, and reliability indices, were obtained from an in-house virtual testbed, verifying the authenticity of the presented findings.
For the supplementary validation studies on the IEEE 13-bus feeder, additional static and dynamic simulations were performed using OpenDSS, with MATLAB used for time-series coordination and result visualization. These simulations are presented separately in section “Case study-based validation on the IEEE 13-bus feeder” to reinforce the practical relevance of the planning strategy.
Proposed solution and analysis
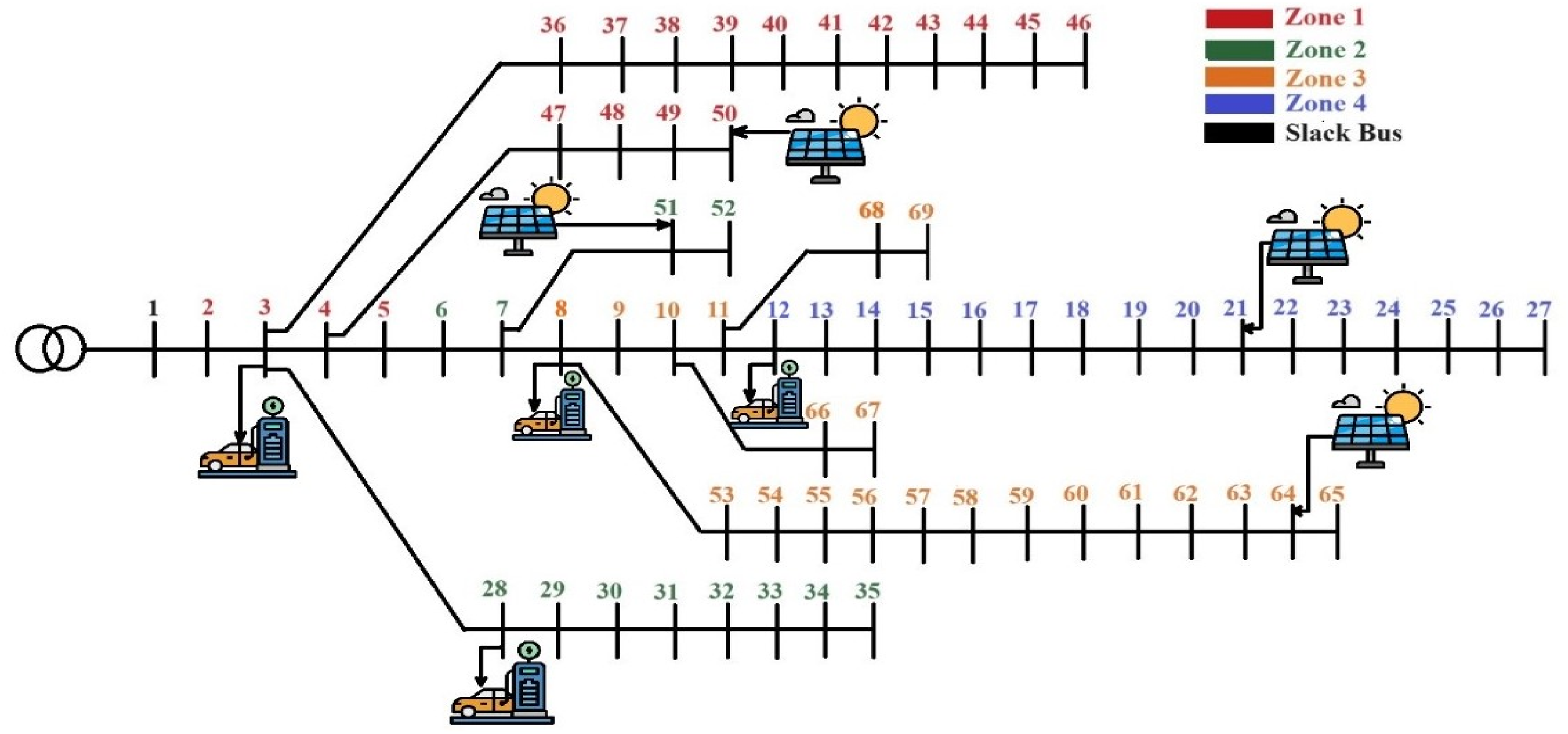
The IEEE-69 bus RDN comprises 68 branches and 69 nodes, with operational parameters set at 100 MVA and 12.66 kV. The system accommodates a cumulative active power load of 3801.4 kW and a combined reactive power load of 2693.6 kVAr. The BFSPF technique has been utilized in this work to evaluate the RPL, SAIDI, and other power system parameters of IEEE 69 bus RDN under different loading conditions. The IEEE 69 bus RDN has been divided into four zones in Figure 2 and each zone comprises one EVCS and one PV to enhance the widespread charging services and improve the power system parameters. The IEEE 69 bus RDN was divided into four zones based on a need-based, area-wise approach to ensure equitable EVCS distribution. Each zone is assumed to represent a demographically dense region with significant EV demand, thus facilitating localized charging access. This zoning also aligns with the radial topology and electrical characteristics of the system for optimized placement.
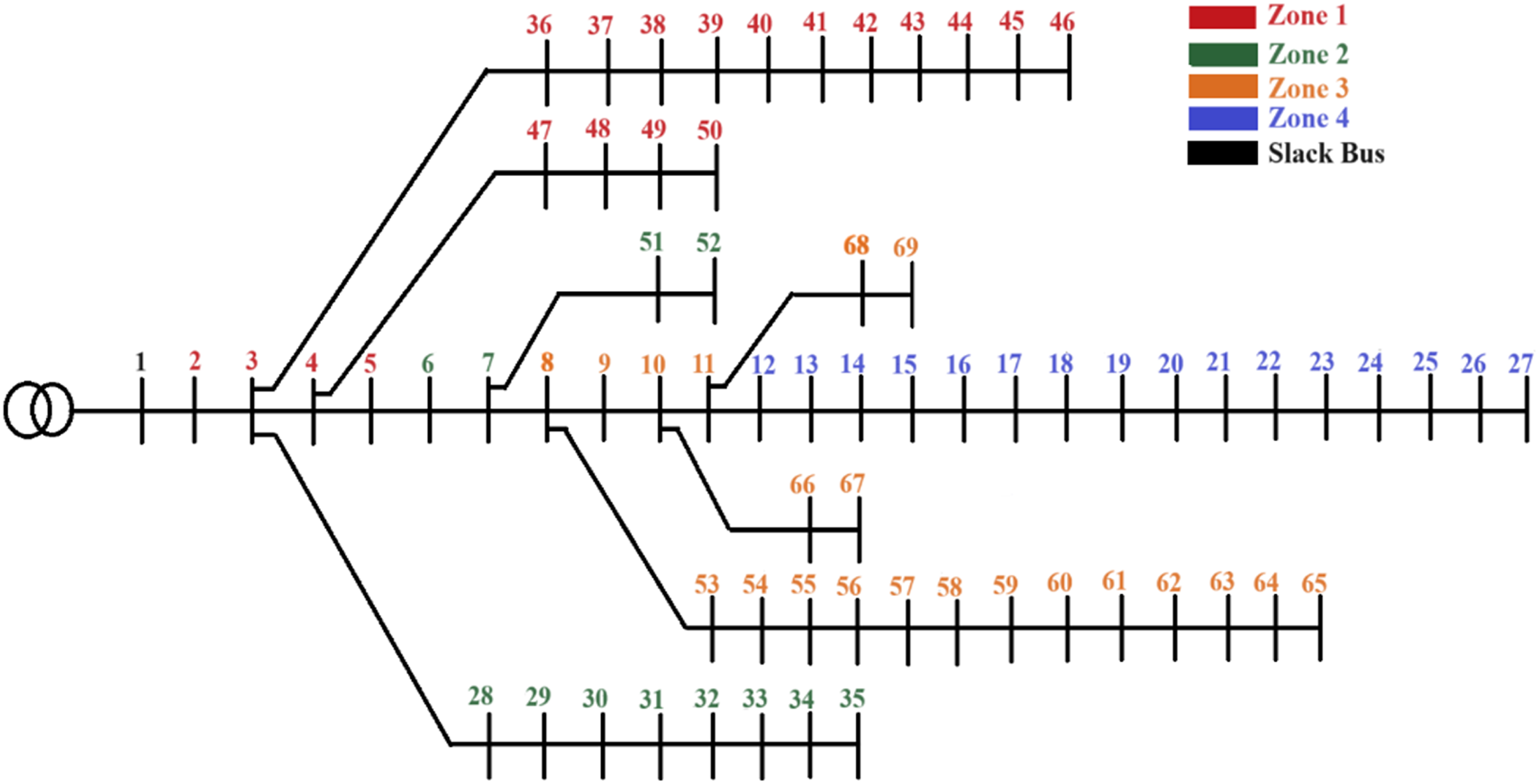
Zone-wise division of IEEE 69-bus RDN.
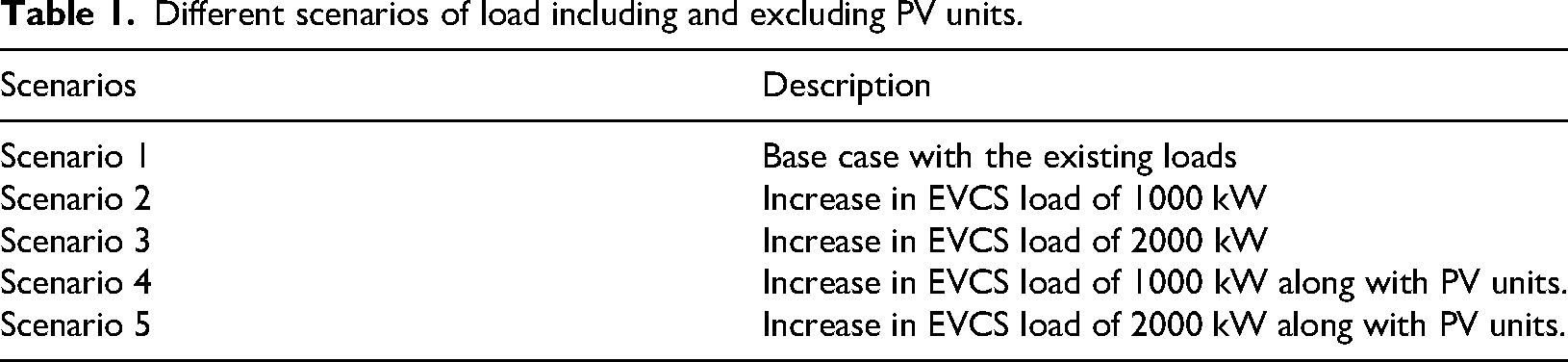
The main objective of this work is to reduce the RPL and SAIDI along with various constraints under different scenarios. EVCS were modeled as constant power loads based on the rated capacity of deployed chargers. Each station was assumed to host Level 3 chargers with a charging rate of 50 kW. While the assumed EV battery capacity is 30 kWh, each charger is rated at 50 kW to represent peak power draw during fast charging sessions. This ensures conservative load modeling under worst-case network conditions. Five different scenarios of IEEE 69 bus RDN including and excluding PV have been considered for the validation of the proposed technique. The five different scenarios have been illustrated in Table 1. The SOS optimization technique has been utilized to address the biobjective optimization problem. GWO, PSO, and WOA optimization techniques have been used to validate the effectiveness of the obtained result. This work has been carried out using MATLAB R2023a on a system having 8 GB RAM, equipped with an Intel Core i5 processor, and a clock speed of 2.40 GHz.
Different scenarios of load including and excluding PV units.
The existing loads on the IEEE 69 bus RDN have an RPL of 224.9804 kW and SAIDI of 6.2115 h per year. The introduction of EVCS loads introduces power loss and reliability challenges in the IEEE 69 bus RDN. When EVCS load is strategically placed at buses 3, 28, 8, and 12 in scenario 2 and scenario 3, it leads to an RPL of 249.5039 kW and 278.8740 kW, along with SAIDI values of 8.2193 h per year and 10.3386 h per year, respectively. To encourage widespread EV adoption, it is advisable to install a substantial number of charging infrastructures along the routes frequented by EV users. While acknowledging the crucial role of charging infrastructures for EV viability, it is recognized that their addition can have adverse effects on power system health. Thus, a balance must be struck between the power system health and the deployment of charging infrastructure.
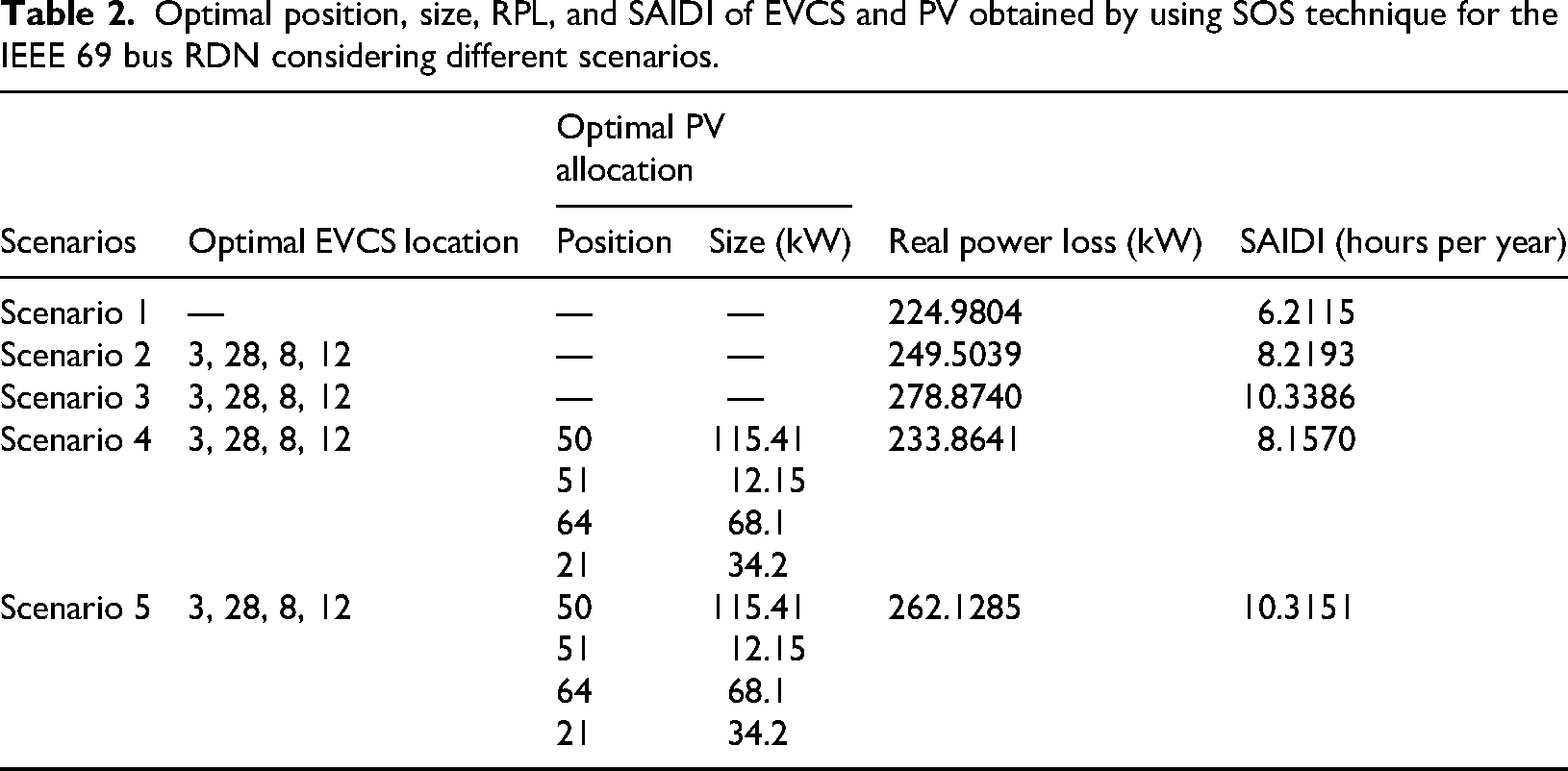
The incorporation of PV is one approach to mitigate the charging impact of EVs. The appropriate placement of PV on optimal nodes addresses power loss and reliability concerns simultaneously. In this context, when PV is introduced along with EVCS in scenario 4 at buses 50, 51, 64, and 21 having the size of 115.41 kW, 12.15 kW, 68.1 kW, and 34.2 kW, respectively, along with EVCS loads at buses 3, 28, 8, and 12 results in an RPL of 233.8641 kW and SAIDI of 8.1570 h per year. In scenario 5, the EVCS load is placed at buses 3, 28, 8, and 12 along with PV at buses 50, 51, 64, and 21 with sizes 115.41 kW, 12.15 kW, 68.1 kW, and 34.2 kW, respectively, resulting in an RPL of 262.1285 kW and SAIDI of 10.3151 h per year. Table 2 illustrates the optimal location of EVCS excluding and including PV optimal position and size by utilizing the SOS tool.
Optimal position, size, RPL, and SAIDI of EVCS and PV obtained by using SOS technique for the IEEE 69 bus RDN considering different scenarios.
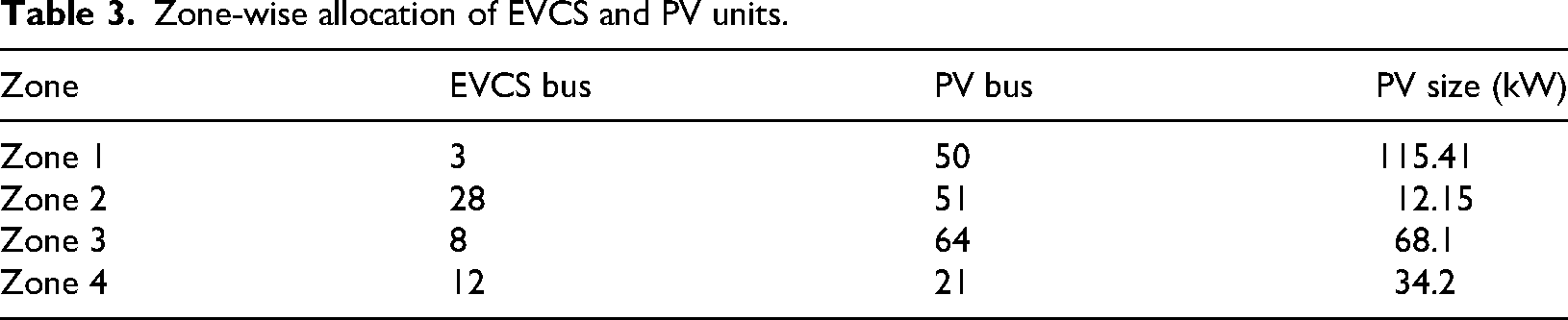
As shown in Table 3, the optimized allocation of EVCS and PV units has been presented according to the zone-wise division of the IEEE 69-bus RDN. Each zone was assigned one EVCS and one PV unit to ensure localized accessibility and balanced power injection. The selection of specific buses within each zone was determined by the optimization process, considering the objective function and constraints. Zone 1, being associated with higher load concentration, received the largest PV capacity to enhance voltage support and reduce system losses. Zone 3 followed with a moderate PV size, while Zones 2 and 4 received smaller PV units corresponding to their respective demand and voltage profile. This zoning strategy ensures equitable infrastructure distribution and supports need-based network planning.
Zone-wise allocation of EVCS and PV units.
The voltage across all the nodes for various scenarios is depicted in Figure 3, by using the SOS technique. The voltage levels remain within permissible limits (0.9 p.u. to 1.1 p.u.) across all test scenarios, confirming voltage stability in the network. The lowest voltage dip occurs in scenarios with high EVCS loads, but PV integration helps maintain voltage consistency across the buses.
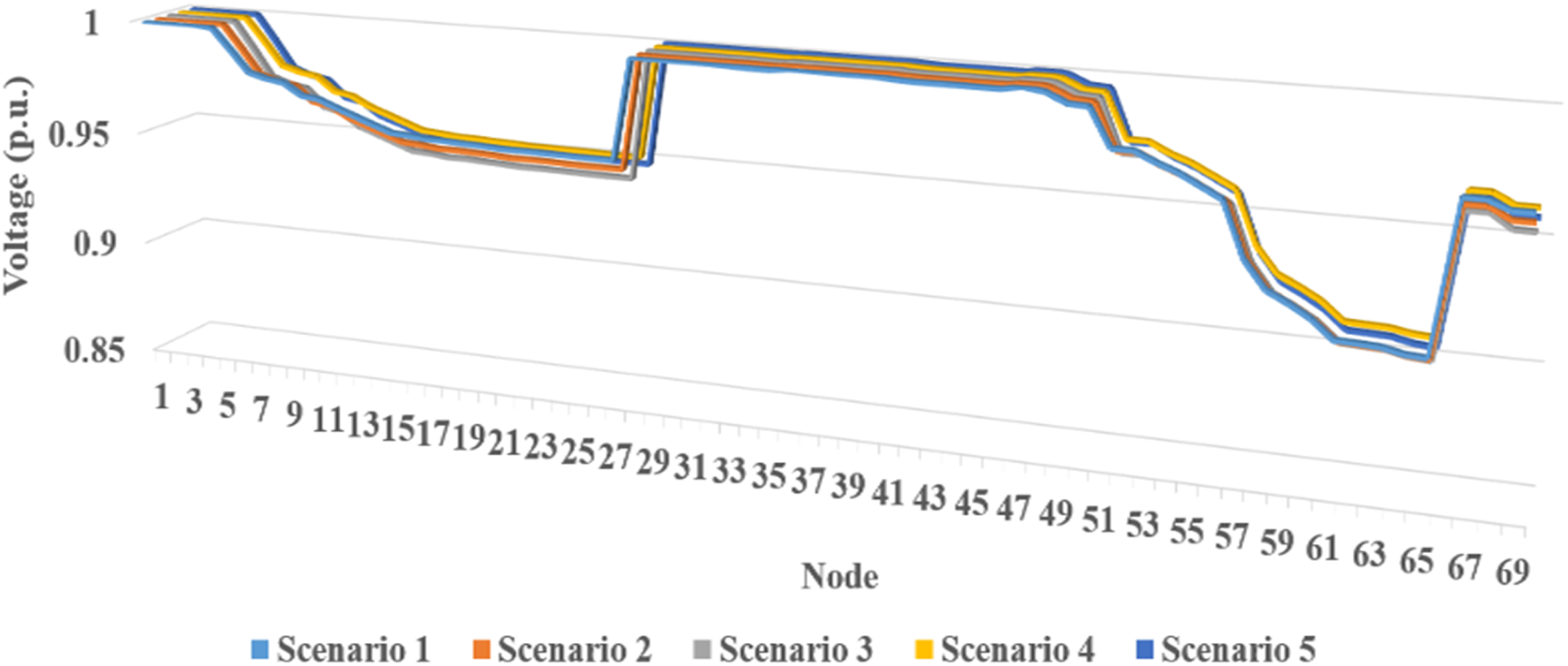
Voltage profile across all the nodes for different scenarios by using the SOS tool.
The current across all the branches is illustrated in Figure 4, by using the SOS tool. The current levels across different branches do not exceed the maximum allowable limits, ensuring that the network operates within its safe current-carrying capacity. The current profile shows that scenarios with PV integration result in lower current flow variations, reducing the burden on the distribution lines.
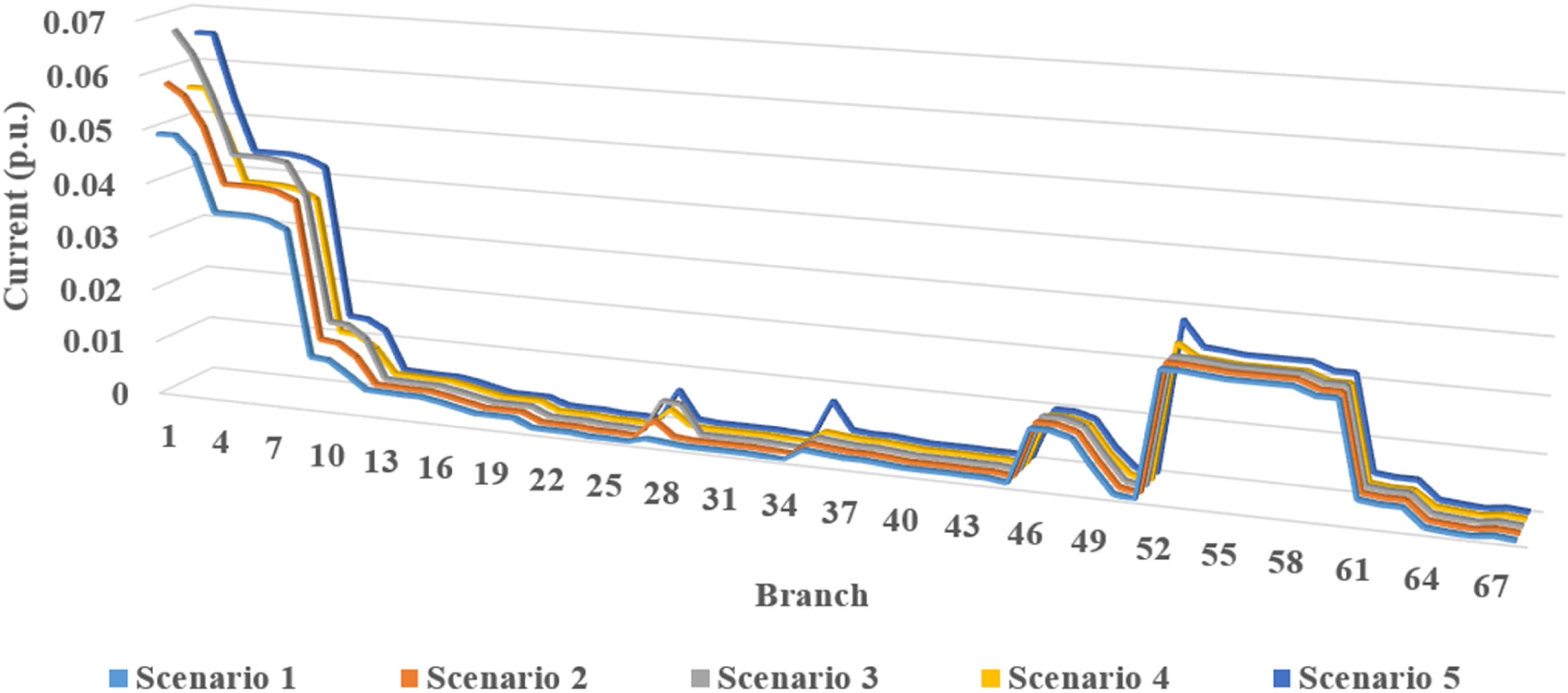
Current profile across all the branches for various scenarios by utilizing the SOS technique.
The Pareto optimal front provides a valuable overview of the decision space, highlighting the feasible solutions that balance both objectives. It aids the decision-makers in selecting a solution based on their preferences or specific requirements. The Pareto optimal front for scenarios 2–5 by using the SOS technique has been depicted in Figures 5 to 8, respectively.
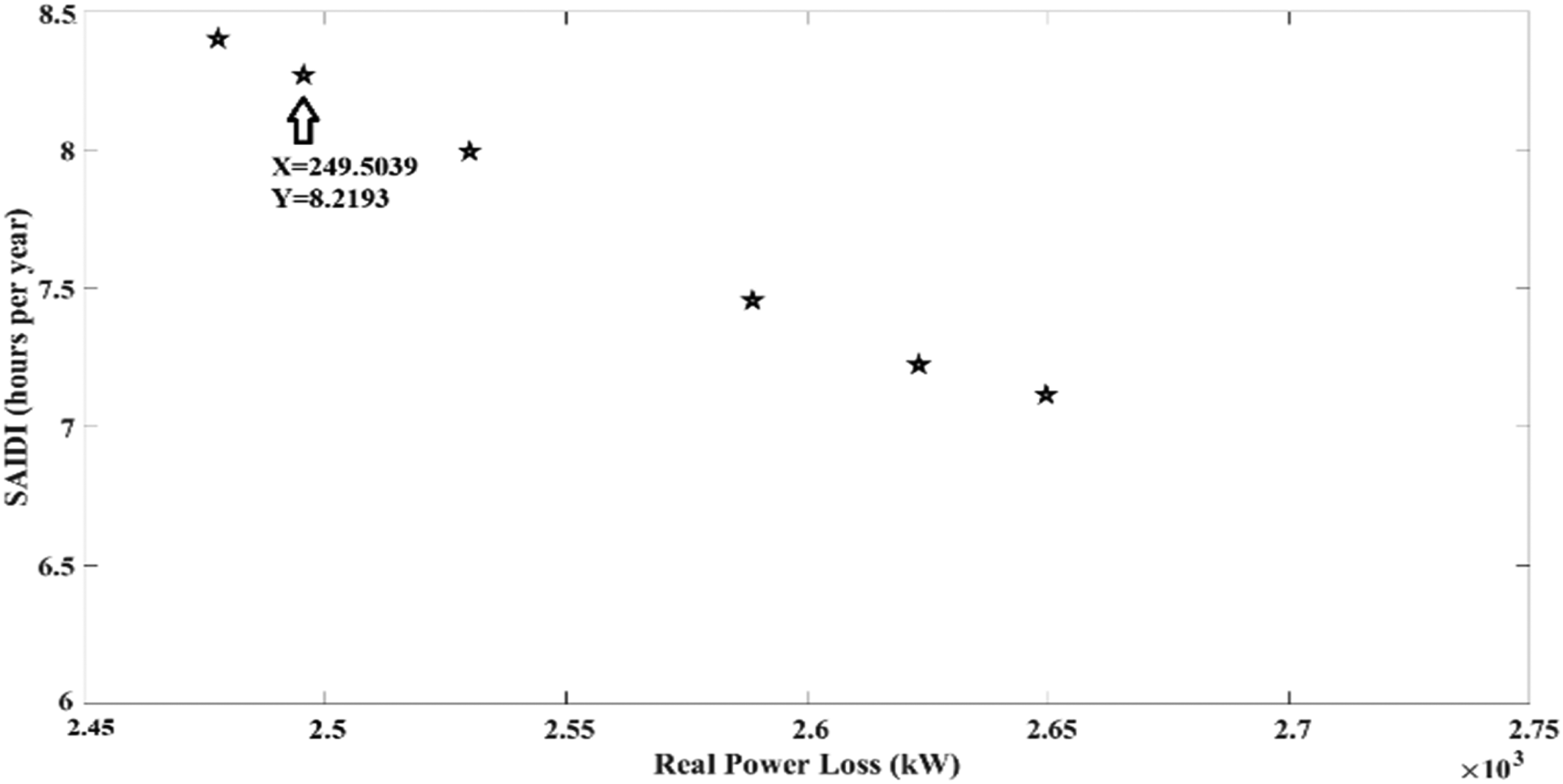
Pareto optimal front for scenario 2.
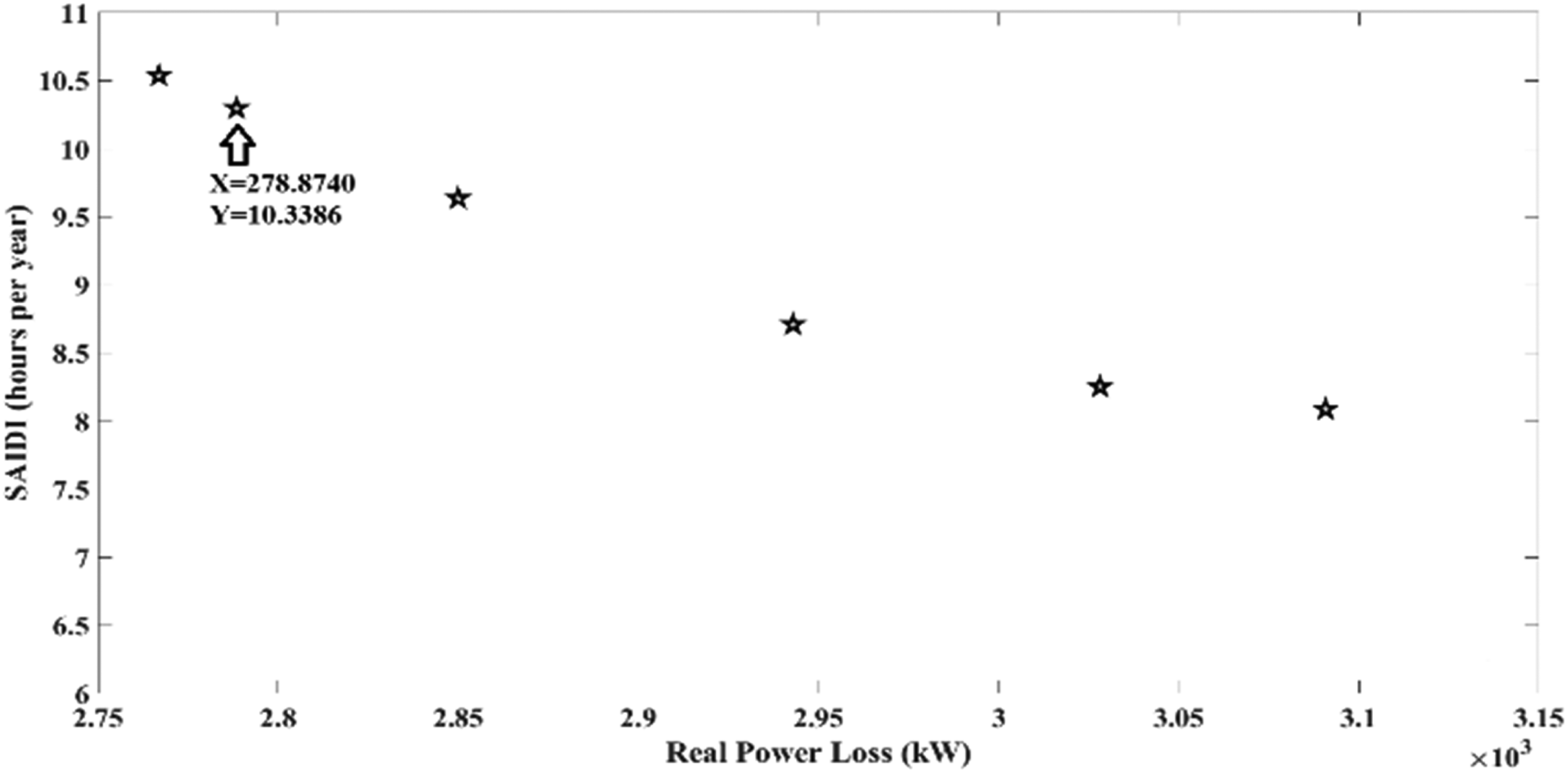
Pareto optimal front for scenario 3.
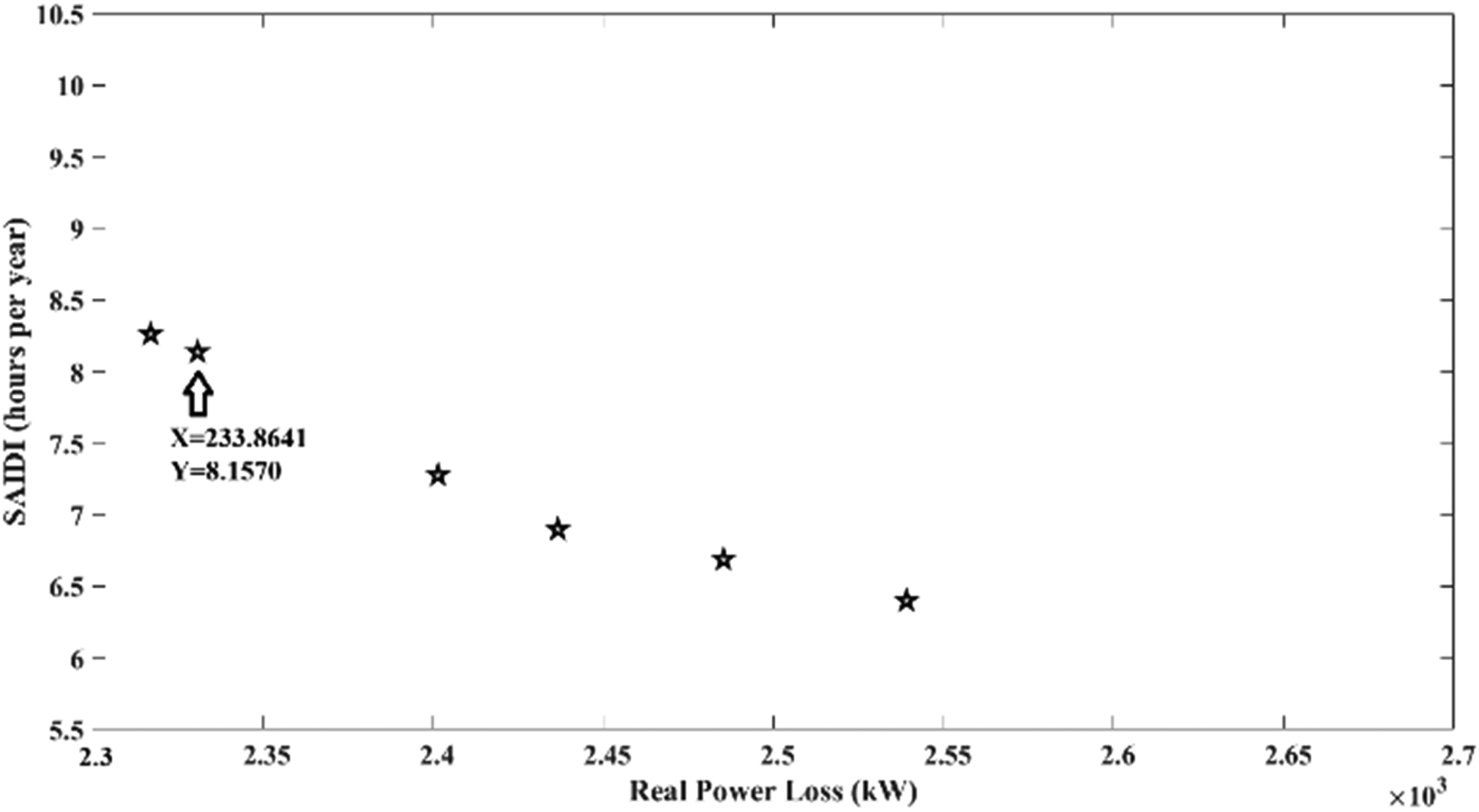
Pareto optimal front for scenario 4.
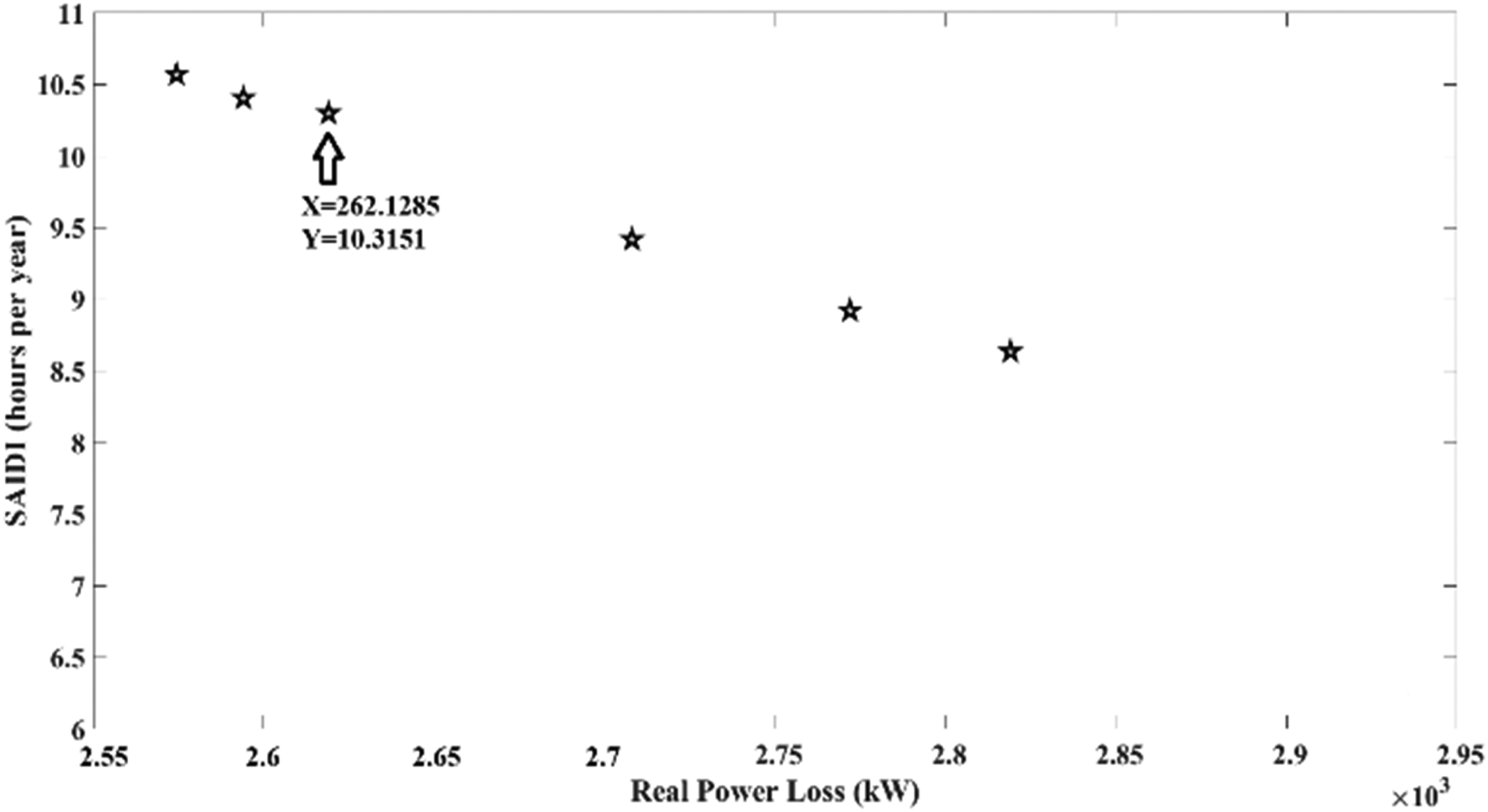
Pareto optimal front for scenario 5.
Scenarios without PV (Figures 5 and 6): The trade-off between power loss and reliability is less favorable due to the lack of additional energy sources. The Pareto front in these scenarios indicates that reducing RPL leads to a substantial increase in SAIDI, which is undesirable.
Scenarios with PV (Figures 7 and 8): The Pareto front moves toward an optimal balance, indicating that integrating PV units leads to a more efficient and stable network. The distribution of points suggests a smoother transition between power loss minimization and SAIDI reduction.
Validation of results
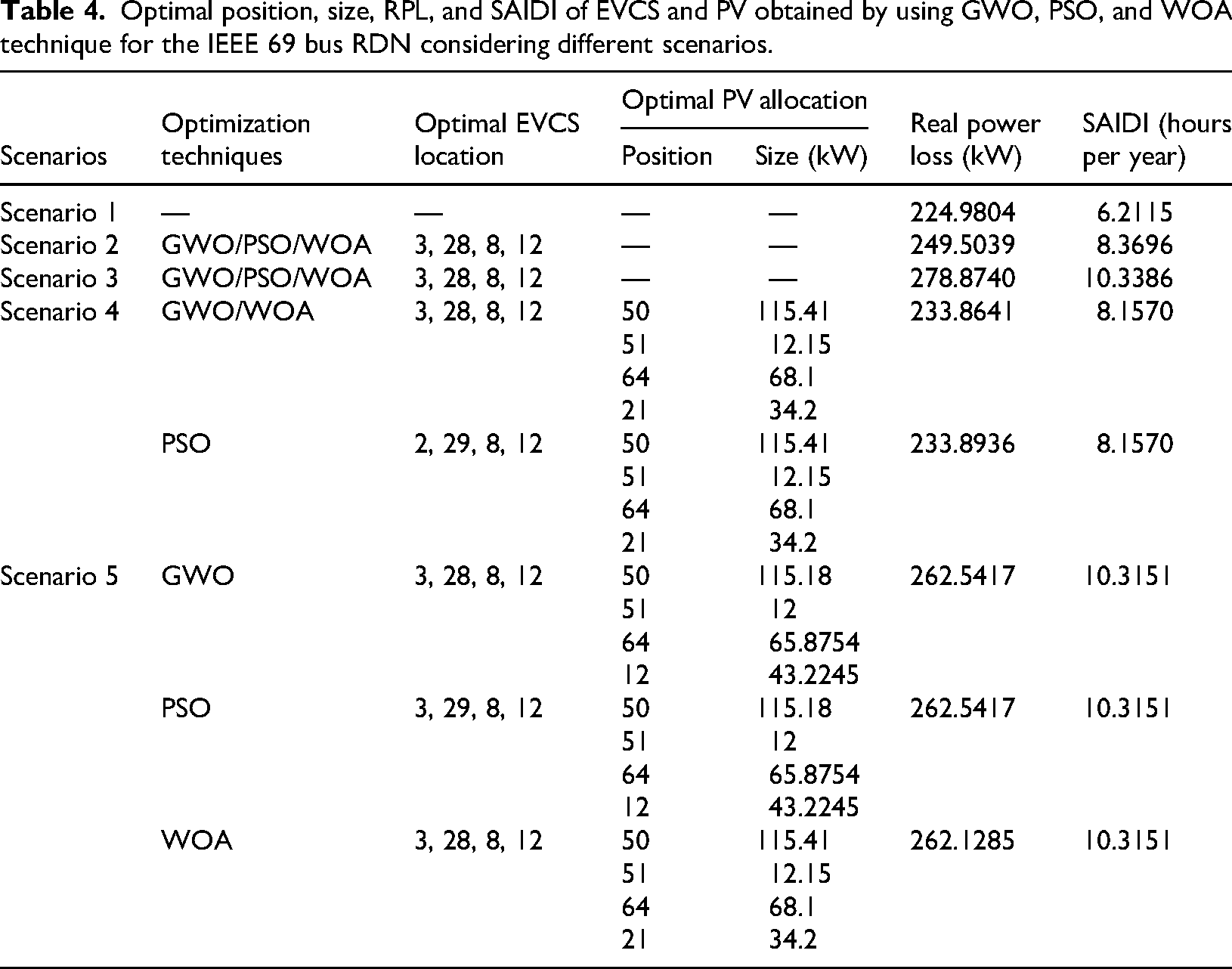
The problem has been resolved by utilizing the PSO, GWO, and WOA optimization tools and the obtained result has been depicted in Table 4. The suitable locations for EVCS allocation, PV along with its size have been obtained. The results obtained in scenario 2 and scenario 3 remain similar using all the applied techniques. In scenario 4, SOS/GWO/WOA solutions remain better than PSO. In scenario 5, the SOS and WOA solutions are similar and superior as compared to GWO and PSO solutions. The results obtained demonstrate the robustness and effectiveness of the proposed solution.
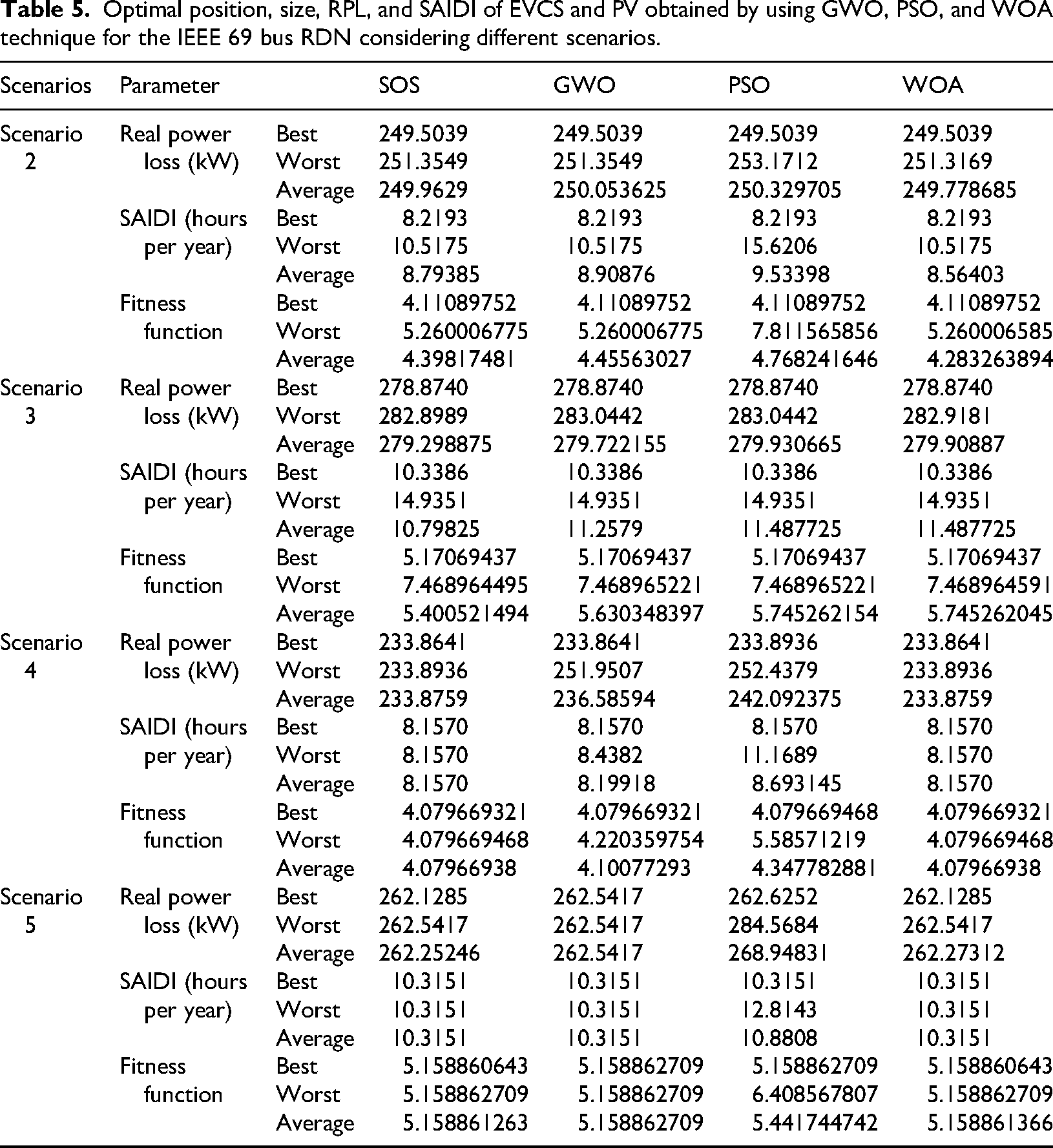
Optimal position, size, RPL, and SAIDI of EVCS and PV obtained by using GWO, PSO, and WOA technique for the IEEE 69 bus RDN considering different scenarios.
Comparison of results
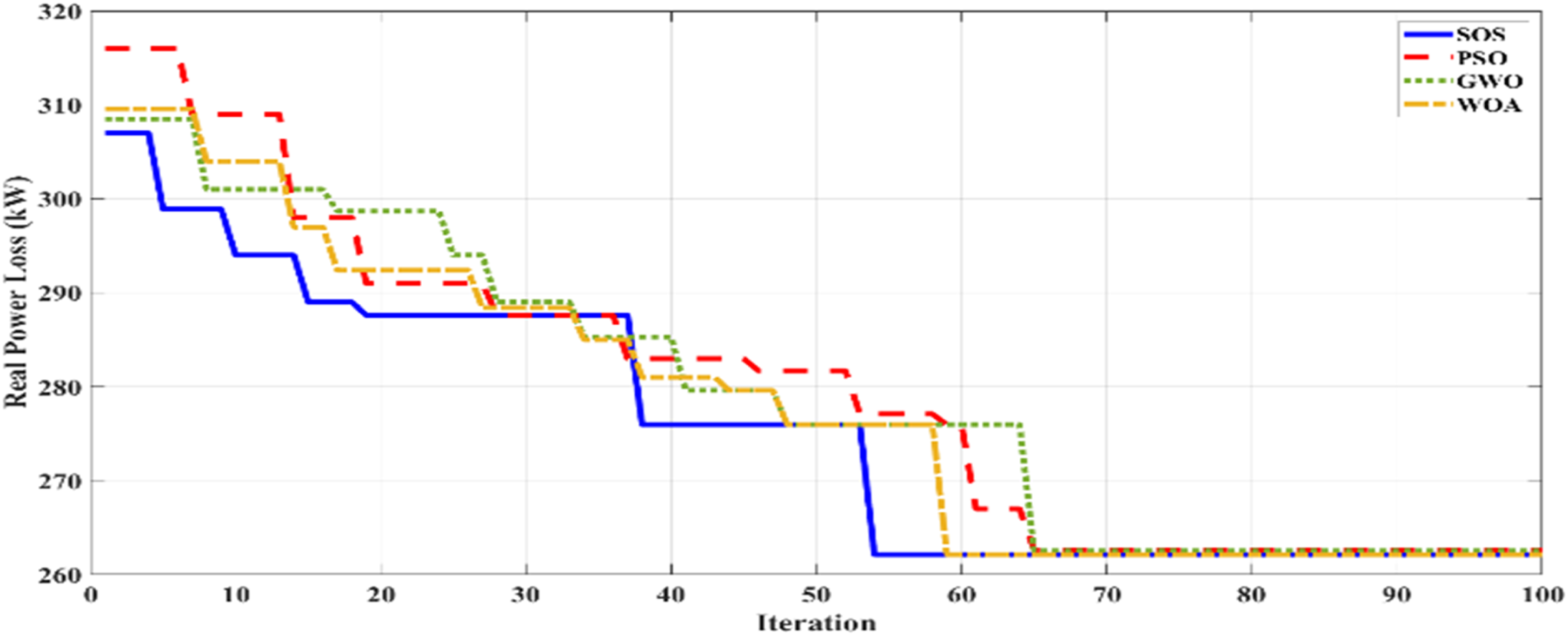
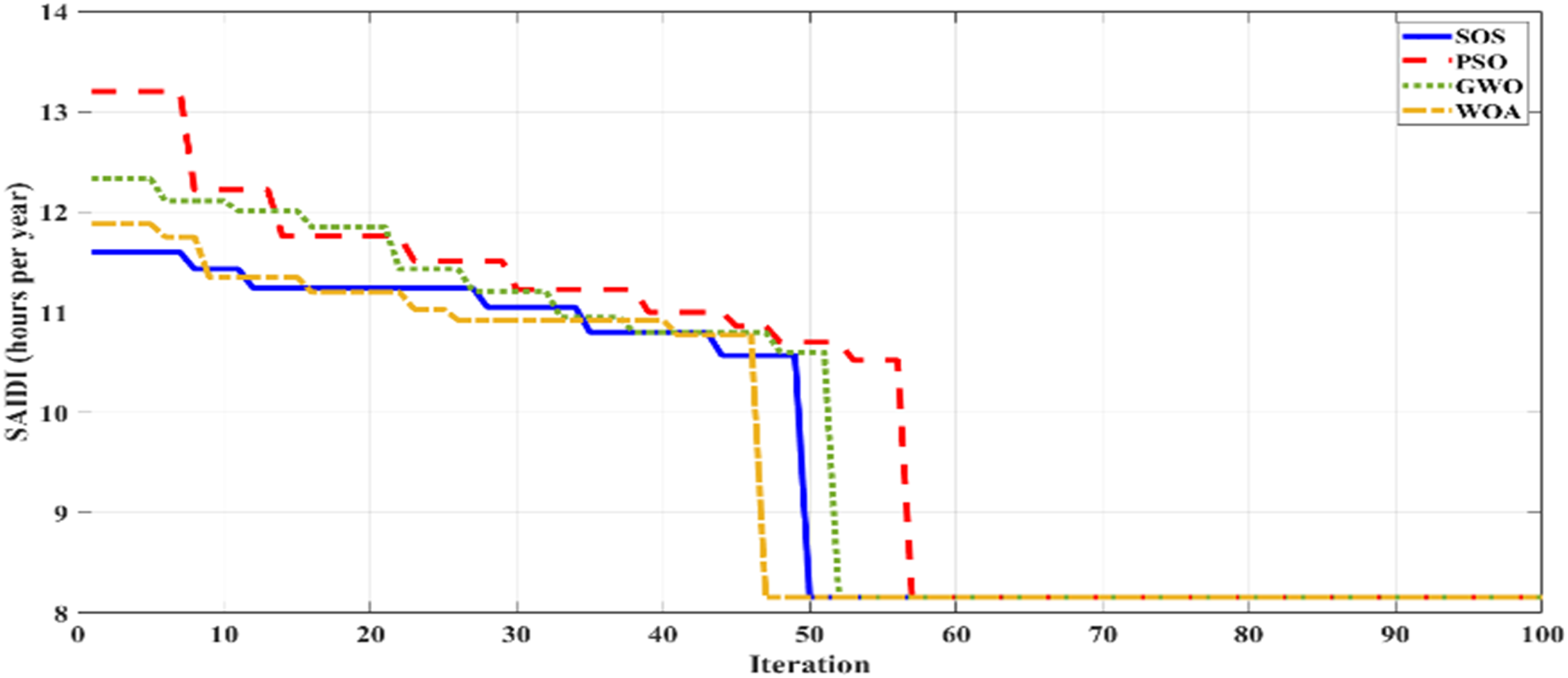
The consistency of the algorithm's convergence across multiple runs or iterations provides insights into its robustness. A consistent convergence indicates that the algorithm is not highly sensitive to initial conditions. The SOS, GWO, PSO, and WOA approaches have been applied to find suitable positions for EVCS, and PV placement along with capacity in the IEEE 69 bus RDN. The comparison of results for various parameters using different optimization tools has been illustrated in Table 5. The convergence characteristics for minimizing RPL using various soft computing techniques for different scenarios are depicted in Figures 9 to 12, respectively.
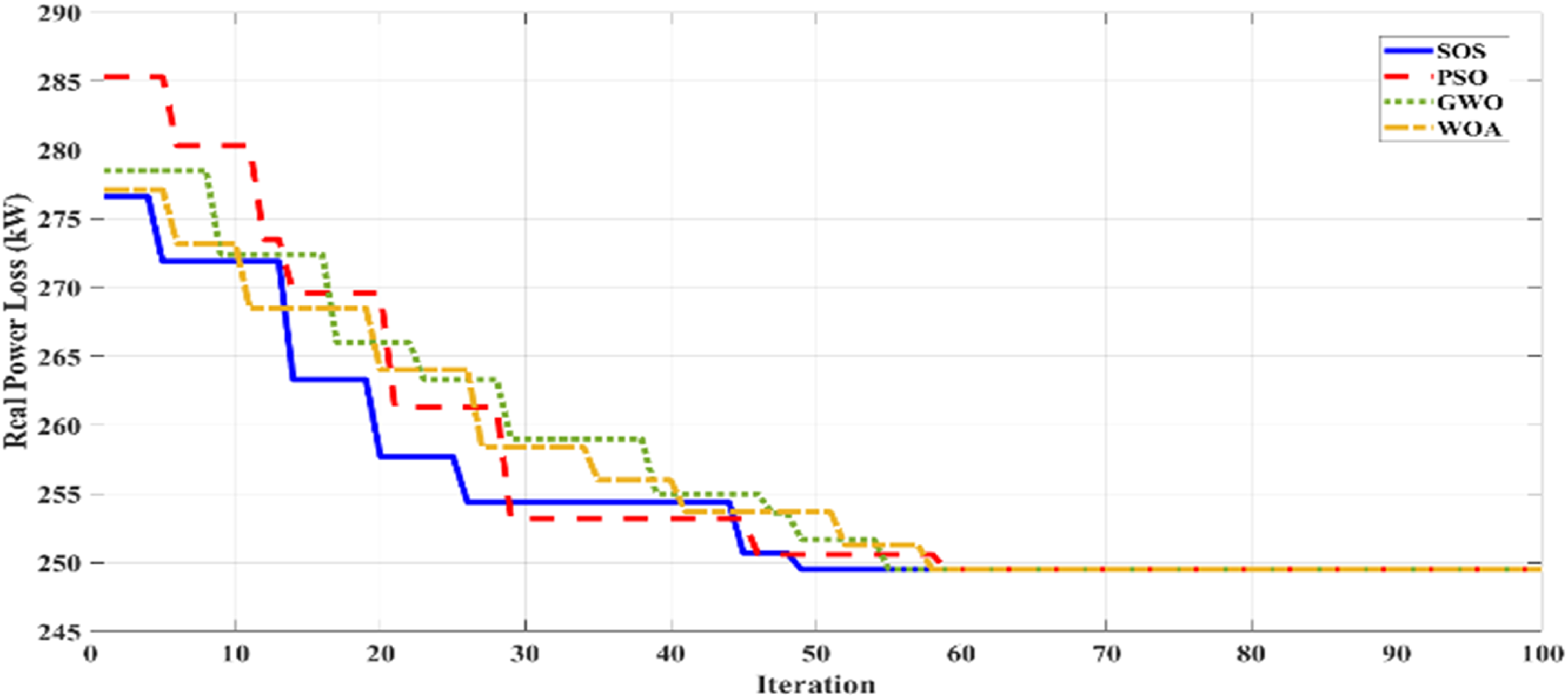
Comparison of convergence characteristics for minimizing RPL for scenario 2 by utilizing various soft computing tools.
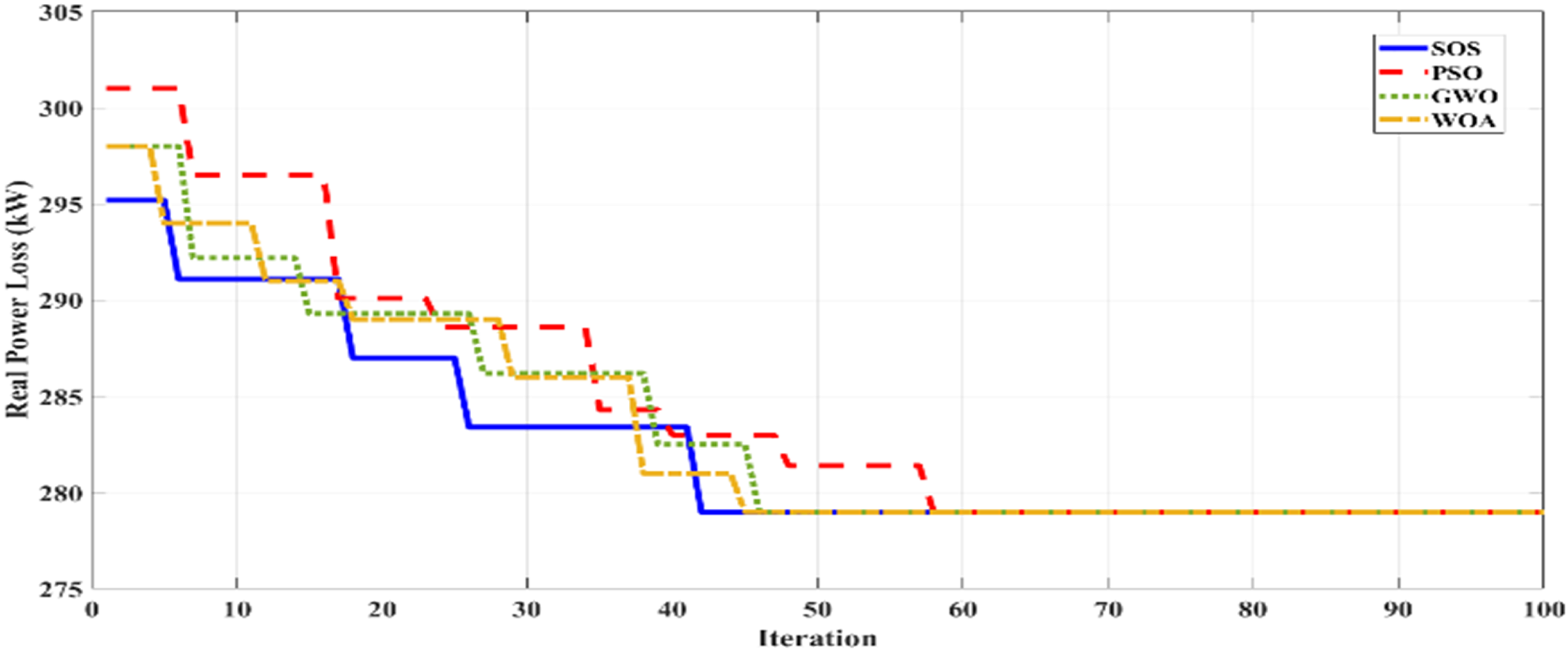
Convergence characteristics comparison for reducing RPL for scenario 3 by using various soft computing tools.
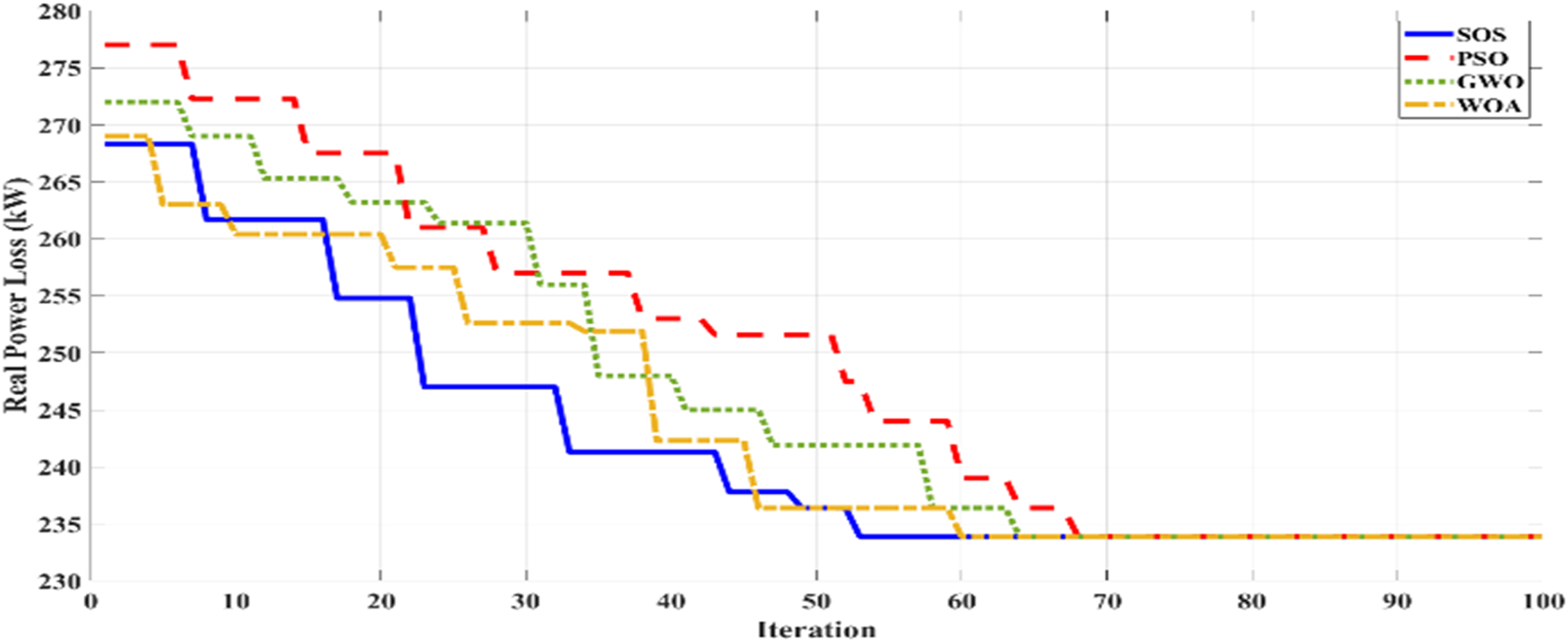
Convergence curve comparison for minimizing RPL for scenario 4 by using various soft computing tools.
Convergence curve comparison for reducing RPL for scenario 5 by using various soft computing tools.
Optimal position, size, RPL, and SAIDI of EVCS and PV obtained by using GWO, PSO, and WOA technique for the IEEE 69 bus RDN considering different scenarios.
In Figure 9, the SOS method achieves the fastest convergence, reaching an optimal solution with minimal iterations. GWO and PSO converge at a slower rate, while WOA exhibits higher fluctuations before stabilizing. Similar behavior is observed in Figure 10, where SOS again provides the best convergence characteristics. PSO struggles with achieving a stable solution, requiring more iterations compared to the other methods. In Figure 11, the presence of PV helps reduce power loss, and all optimization methods converge faster compared to scenarios without PV. However, SOS still provides the most consistent and reliable results. The overall trend remains the same in Figure 12, with SOS outperforming other methods in terms of both speed and solution accuracy. GWO and WOA follow closely, but PSO continues to lag in performance.
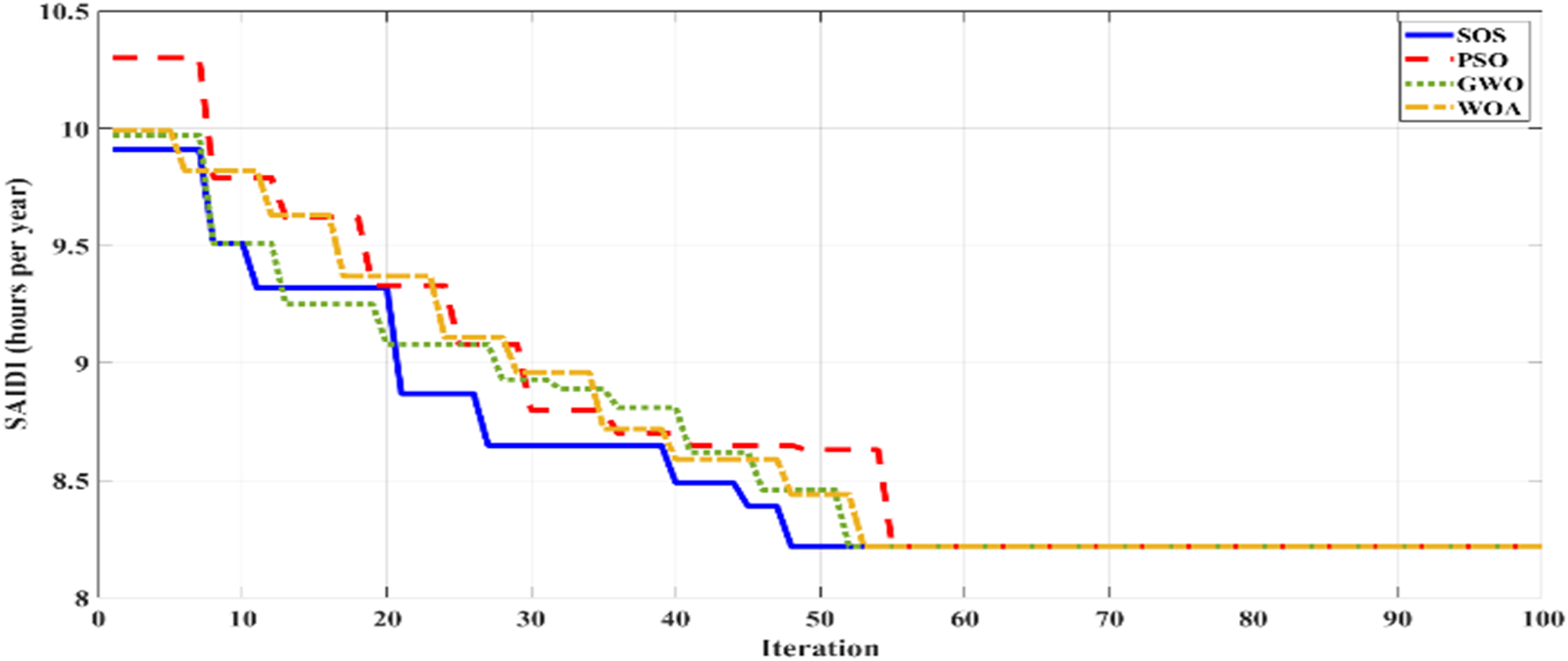
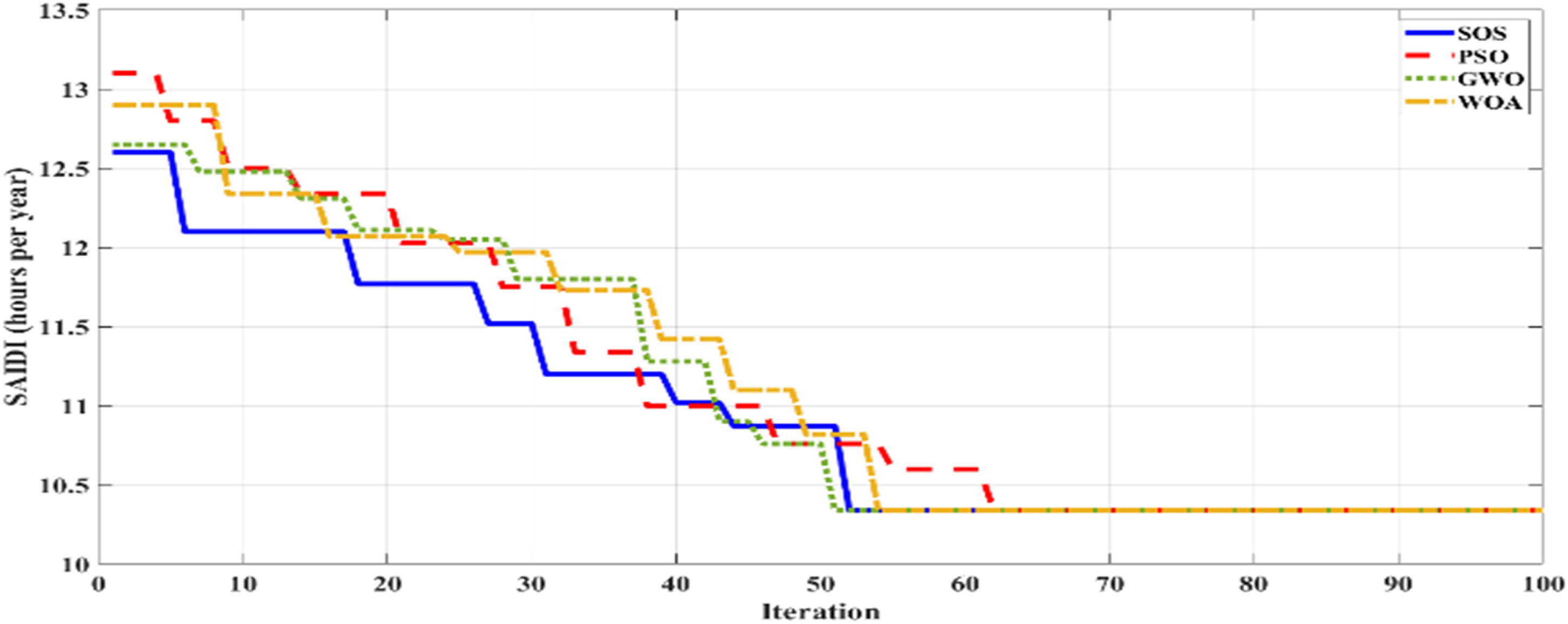
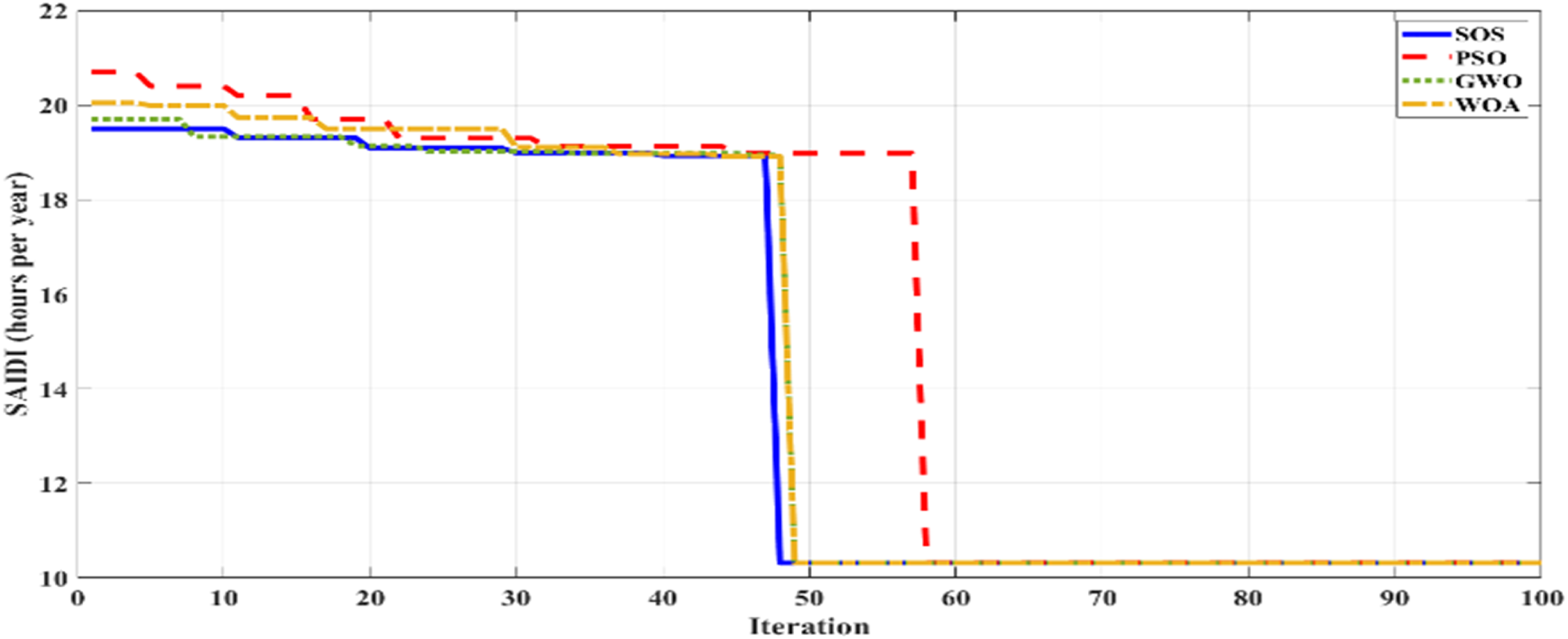
The convergence curve to minimize the SAIDI for different scenarios is illustrated in Figures 13 to 16, respectively, by utilizing various optimization tools. In Figure 13, SAIDI minimization shows a slower convergence rate across all techniques compared to RPL minimization. SOS still provides the fastest convergence, while PSO exhibits instability. The trend in Figure 14 is similar to Figure 13, where SOS provides better stability, and PSO requires significantly more iterations to stabilize. GWO and WOA perform moderately well. In Figure 15, the introduction of PV units helps in reducing the SAIDI, resulting in faster convergence for all methods. However, SOS maintains its superiority by achieving an optimal solution with fewer iterations. In Figure 16, the SOS method once again proves to be the most efficient, while PSO and GWO show slower convergence. WOA achieves a reasonable balance between convergence speed and accuracy.
Comparison of convergence characteristics for minimizing the SAIDI for scenario 2 by using various soft computing tools.
Convergence characteristics comparison for scenario 3 by using various optimization tools for minimizing the SAIDI.
Convergence curve comparison for scenario 4 by utilizing various optimization tools for minimizing the SAIDI.
Comparison of convergence characteristics for scenario 5 by utilizing various optimization tools for reducing the SAIDI.
The assessment of the best case of RPL and SAIDI for various scenarios has been illustrated in Figures 17 and 18, respectively. The introduction of PV reduces RPL significantly compared to scenarios without PV. The largest reduction is observed when PV is optimally placed to support the additional EVCS loads. The multiobjective optimization achieves a balanced trade-off, maintaining a reasonable reliability level while minimizing power loss. The results indicate that scenarios with PV show a smaller increase in SAIDI, ensuring better overall network performance. It has been observed that when EVCS is integrated with PV, the RPL has been reduced from 249.5039 kW to 233.8641 kW for an increase of 1000 kW EVCS load and 278.8740 kW to 262.1285 kW for an increase of 2000 kW EVCS load. The position of EVCS allocation has been changed when PV is integrated for the same load. Thus, the SAIDI has been increased marginally as multiobjective formulation presents a compromised solution for maintaining the balance in the RDN. The placement of EVCS and PV in IEEE 69 bus RDN has been depicted in Figure 19. It has been observed that the optimal position of EVCS is 3, 28, 8, and 12, and PV is 50, 51, 64, and 12, respectively, considering all the scenarios to ensure widespread charging accessibility while enhancing grid stability.
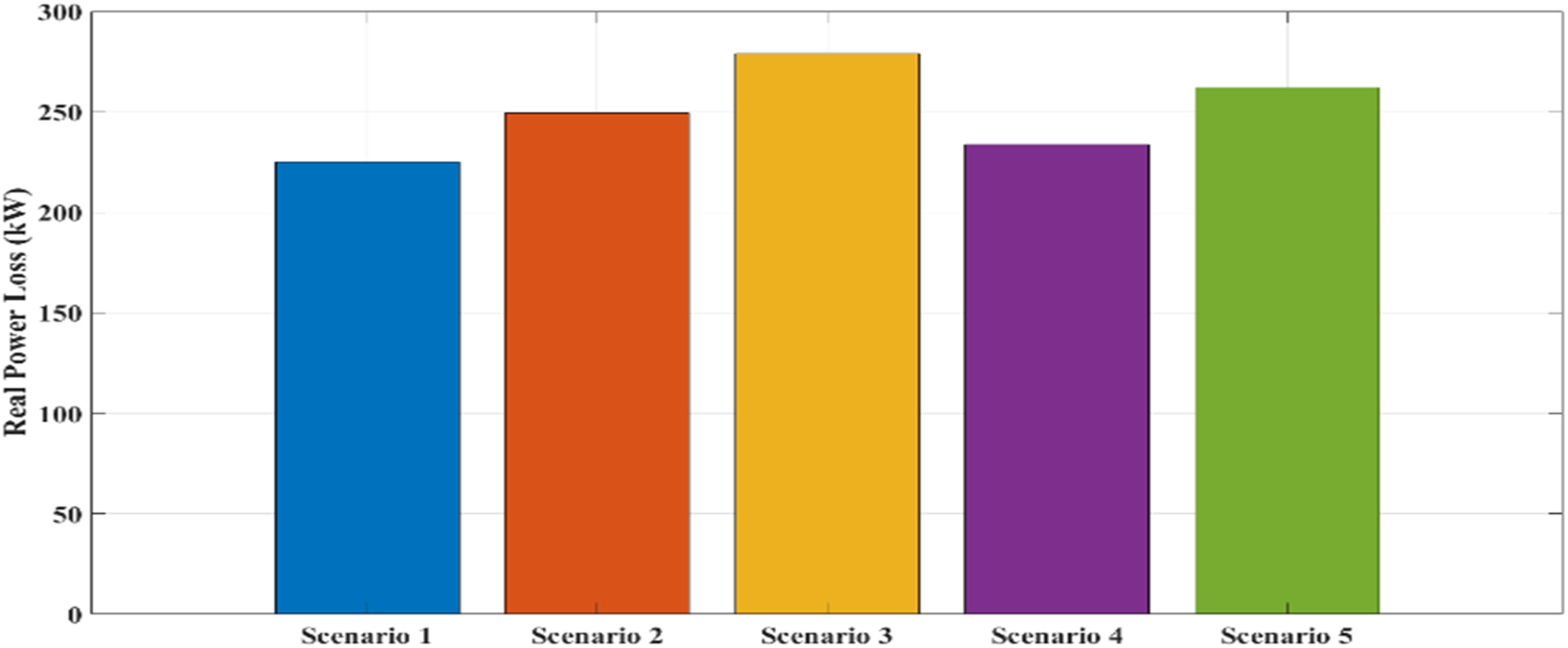
Assessment of real power loss for various scenarios.
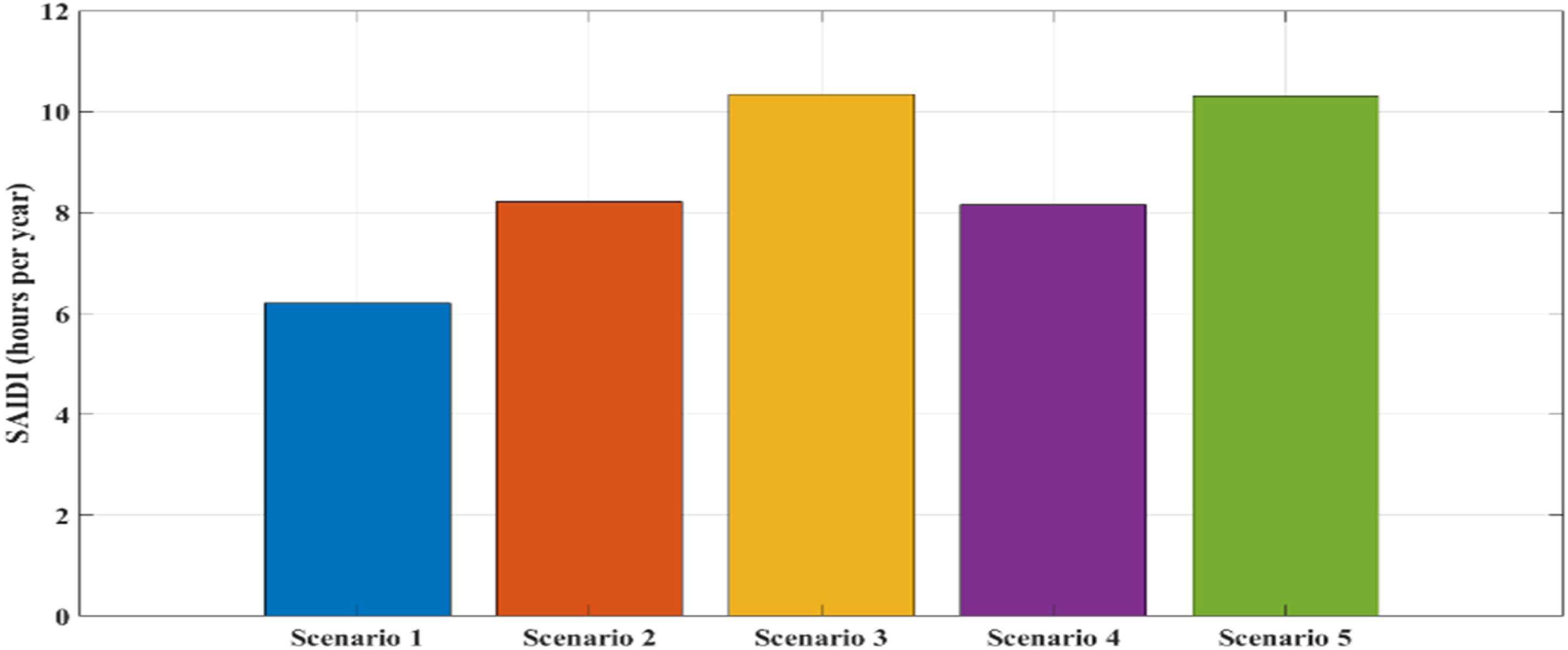
Assessment of SAIDI for various scenarios.
Placement of EVCS and PV in IEEE 69 bus RDN.
Optimization-based validation on IEEE 69-bus RDN
In the context of RDN planning, a comprehensive simulation framework serves as the primary tool for validating the proposed optimal placement strategy for EVCS integrated with PV units. This section focuses exclusively on validating the optimal solution derived from the IEEE 69-bus system through a multipronged simulation-based approach.
In summary, the validation of our planning approach on the IEEE 69-bus system is achieved through a multilayered strategy—verifying solution optimality via multiple algorithms, testing performance under varied scenarios, and ensuring physical realism using a detailed power flow model. To further confirm the authenticity and generalizability of the proposed methodology, a separate case study-based validation is presented in section “Case study-based validation on the IEEE 13-bus feeder.” This includes both static and time-series simulations on the IEEE 13-bus system, offering insight into real-time operational behavior and further reinforcing the robustness of the strategy.
Case study-based validation on the IEEE 13-bus feeder
To further validate the proposed planning framework beyond the IEEE 69-bus system, a case study was performed on the standard IEEE 13-bus distribution feeder. This feeder is widely used for practical assessments of distribution networks due to its unbalanced structure, inclusion of delta–wye transformer configurations, lateral loads, and the presence of capacitor banks and voltage regulators. The purpose here is not to optimize component placement, but to examine system response to the integration of an EVCS and a PV unit in both static and dynamic operating conditions. A 25 kW EVCS is located at Bus 671, and a 25 kW PV unit is placed at Bus 675. The schematic layout of the feeder, along with the locations of the EVCS and PV, is shown in Figure 20.
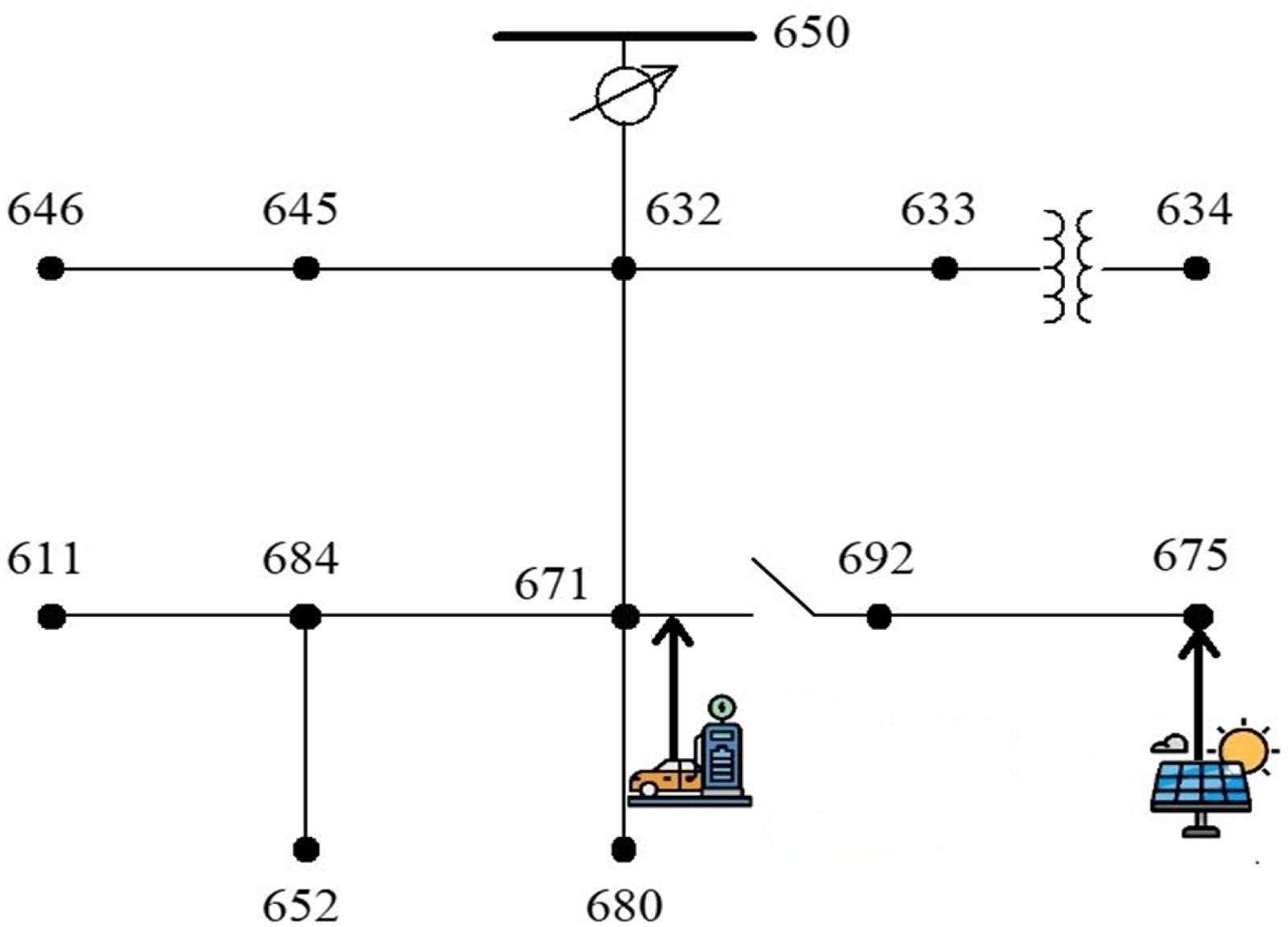
Schematic layout of the IEEE 13-bus test feeder used for validation.
The static validation examines the steady-state impact of coordinated EVCS and PV integration on feeder performance. Two simulation cases were conducted using OpenDSS. In Case 1, only an EVCS with a 25 kW load was placed at Bus 671. In case 2, a 25 kW PV source was additionally placed at Bus 675 to support the same EVCS load. Both simulations were solved under fixed load flow conditions, and the voltage magnitude at Bus 671 and total system real power loss were recorded. The results in Table 6 show that the inclusion of PV support marginally improved the minimum voltage at the EVCS bus and reduced the total system losses, demonstrating the benefit of coordinated deployment of EVCS and DG.
Static simulation results on the IEEE 13-bus feeder.

These findings validate the real-world benefit of the planning strategy even when implemented without optimization on a different test feeder. The marginal improvements reflect a more resilient and loss-efficient distribution network under coordinated operation.
A dynamic time-series simulation was conducted using the IEEE 13-bus distribution feeder to supplement the steady-state validation results presented earlier. This additional simulation serves to validate the operational feasibility of the proposed EVCS–PV coordination strategy under realistic, time-varying conditions.
In this case study, an EVCS was placed at Bus 671 of the IEEE 13-bus feeder, with its load gradually increasing from 5 kW to 25 kW over a 30-min interval. Concurrently, a PV generator located at Bus 675 reduced its output from 25 kW to 10 kW at the midpoint of the simulation. The simulation was carried out using MATLAB in conjunction with OpenDSS, where MATLAB controlled the dynamic profiles and OpenDSS performed the power flow computations at each 5-min time step.
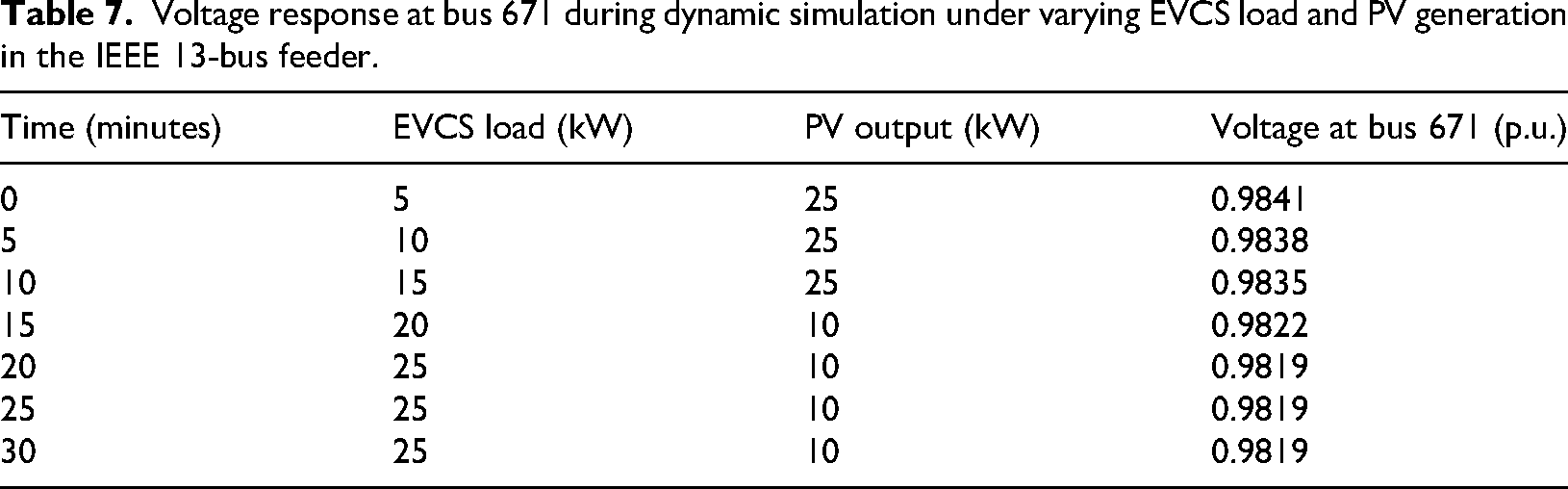
The resulting voltage profile at Bus 671, shown in Figure 21 and Table 7, exhibits a stable and smooth response to the simultaneous increase in load and decrease in generation. While this simulation was conducted on the IEEE 13-bus feeder—a widely accepted benchmark for time-series validation—the findings reinforce the general robustness of the proposed planning methodology and support its applicability under dynamic operating scenarios.
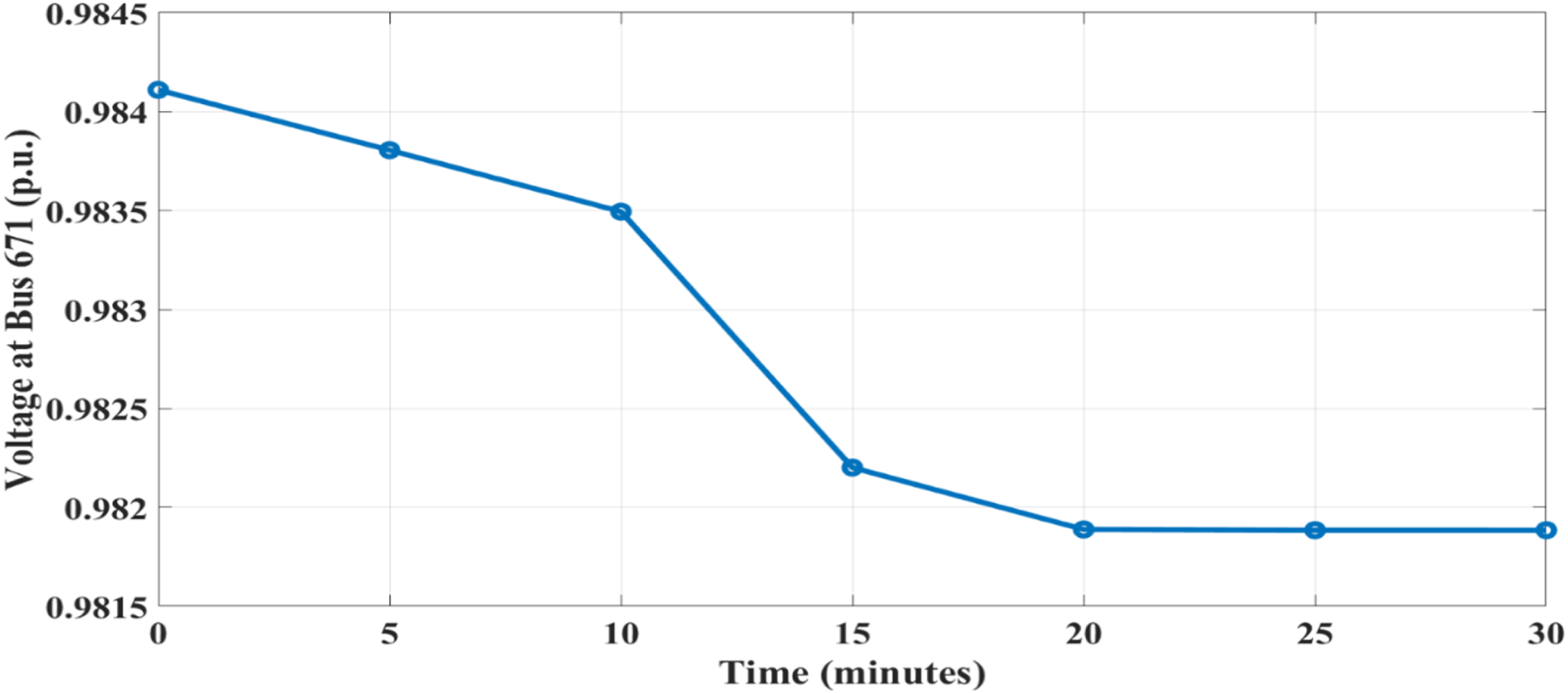
Voltage at bus 671 of the IEEE 13-bus feeder during a 30-min simulation with increasing EVCS load and reduced PV output.
Voltage response at bus 671 during dynamic simulation under varying EVCS load and PV generation in the IEEE 13-bus feeder.
Conclusion
This paper presents a comprehensive approach to address the challenges posed by the stochastic nature of EV loads on the RDN. This work seeks to reduce RPL and enhance the reliability indices of the electrical network by strategically integrating EVCS with PV units. Different scenarios have been considered including and excluding PV to observe the impact of introducing PV in the network. The methodology employed in this work involves the optimization of PV capacity and the allocation of EVCS and PV in different zones of the IEEE 69 bus RDN. The division of the RDN into zones, each equipped with an EVCS and a PV, ensures widespread charging facilities and contributes to enhanced network performance. The BFSPF technique is utilized to analyze the RDN, and the optimization problem is addressed by using the SOS technique. The effectiveness of this approach is validated by comparing the outcomes with GWO, PSO, and WOA tools. The statistical tests demonstrate the robustness of the findings. This paper contributes valuable insights into the evolving landscape of electric transportation and power distribution systems. The findings emphasize the potential of integrating PV with EV charging infrastructure to create a more resilient and efficient power grid. As EVs continue to play a crucial role in the future of transportation, the proposed approach offers a promising solution to mitigate the challenges associated with their integration into existing power distribution networks.
This study adopts a planning-oriented approach, validated through extensive steady-state simulations using the BFSPF method in MATLAB. The inclusion of a static and dynamic validation on the IEEE 13-bus feeder further demonstrates the robustness of the strategy under real-time operational variations. While dynamic modeling and power-hardware-in-the-loop (p-HIL) testing are important for operational control and real-time system behavior assessment, they are beyond the current planning scope. Nonetheless, the authenticity of our findings is ensured through multiscenario and multialgorithm testing. Future work will extend this research toward time-domain simulation, uncertainty modeling, and p-HIL implementation to analyze transient grid behavior and operational feasibility in real-time environments.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.