
Abstract
Vehicle dynamic control (VDC) is an important study where the vehicle performance, handling, stability, and statistics of the vehicle can be recorded to improve performance. Torque vectoring controller (TVC) a form of VDC is used to improve vehicle handling and driving in extreme situations by correcting oversteer and understeer conditions, this TVC is used in EV to reduce the consumption of the battery by reducing the general energy use. In TVC, it is broadly classified to classical and intelligent methods where classical methods used a two-stage optimization method via a high and low level controller while intelligent torque vectoring controller (ITVC) methods uses artificial intelligence (AI) based methods like soft computing, machine learning and other AI methods to enhance vehicle performance and efficiency. Each ITVC is reviewed where the advantages, disadvantages and applications of each controller is compared. The study also shows the timeline of ITVC development showing every existing ITVC method being conducted, it also shows the complexity, vehicle stability, braking performance, lateral stability, mechanical energy consumption and energy conversation between the different ITVC methods.
Introduction
Vehicle dynamics (Gillespie, 1992) is the field of study that focuses on understanding how vehicles move and respond to various forces and inputs while in motion. It analyzes the interactions between a vehicle's components, including tires, suspension systems, chassis, and powertrain, along with external forces such as gravity, friction, and aerodynamic drag.
The dynamics of a vehicle can be analyzed in terms of its six degrees of freedom, which encompass longitudinal motion (forward and backward), lateral motion (side to side), and vertical motion (up and down), and rotational movements (yaw, pitch, and roll). Each of these motions is influenced by factors like acceleration, braking, and steering inputs from the driver (Manning and Crolla, 2007).
Key aspects of vehicle dynamics include the study of tire forces (Pacejka, 2002) during acceleration and cornering, the effects of weight distribution on traction and stability, and the role of aerodynamics in shaping vehicle performance. By modeling and simulating these dynamics, this allows engineers to understand how a vehicle will perform under different conditions, supporting the design of safer, more efficient, and better-handling vehicles. Such insights are essential for developing advanced technologies like stability control and active suspension systems, enhancing the overall driving experience.
ITVC methods under vehicle dynamic control technology are especially useful for electric vehicles (EVs) as reduced consumption of electricity from vehicle operation means more uptime of vehicle. One major drawback behind the underutilization of EVs is that their reliability is lower compared to internal combustion engine (ICE) vehicles. With the inevitable shift from fossil fuels to clean energy, driven by environmental or political factors, EVs face significant challenges compared to traditional ICE vehicles, such as limited infrastructure availability, particularly in underdeveloped regions, and high battery storage and maintenance costs, making them less attractive to consumers, which is why techniques this technology reduces the use of battery and increase the general quality of life of EV.
Steering is another crucial aspect of vehicle dynamics. The vehicle's steering system (Bode, 2006; Mammar and Koenig, 2002) must provide precise control over the vehicle's direction of travel, while also being responsive and easy to use. The suspension system contributes to steering by keeping the wheels in contact with the road surface for maximum grip and control. Braking is also a key aspect, requiring reliable, consistent stopping power in various driving conditions. Technologies like anti-lock brake systems (ABS) and electronic stability control (ESC) helps prevent skidding and loss of control during hard braking.
TVC a part of vehicle dynamic control is a means of correcting vehicle oversteer and understeer characteristics during turning and cornering maneuvers. It reduces the vehicle mechanical stress, increases performance and uptime of the vehicle which is especially important as it reduces the battery usage in electric vehicles. EVs play a crucial role in advancing TVC due to their unique powertrain architecture and individual wheel torque control capabilities. Unlike traditional internal combustion engine (ICE) vehicles that rely on mechanical differentials, EV allows precise and independent control of each wheel's torque, significantly enhancing stability, handling, and energy efficiency.
In EVs with multiple motors (e.g., one per wheel or per axle) (Park et al., 2022), TVC can intelligently adjust the torque applied to each wheel based on real-time conditions, improving cornering performance and vehicle stability. Unlike ICE vehicles, which use clutches, differentials, and braking systems to redistribute torque, EV can apply instantaneous torque adjustments electronically, making it faster and more efficient.
EV also allows real-time torque adjustments based on vehicle yaw rate, lateral acceleration, and driver inputs. This improves traction control, reduces understeer and oversteer, and enhances the safety of high-speed maneuvers. EVs can be configured in Front-Wheel Drive (FWD), Rear-Wheel Drive (RWD), or All-Wheel Drive (AWD) setups (Mikle and Bat'a, 2019), making TVC adaptable to different vehicle architectures (Sun et al., 2023). In-wheel motor EVs benefit the most from TVC as they allow for precise control of each wheel independently, eliminating the need for complex mechanical systems.
Numerous technological advancements are being researched to make EVs viable for general use, including regenerative braking, improving wheel dynamics (Koehn and Eckrich, 2004), terrain maneuvers, smart energy limiters, free-wheel driving systems, ABS, suspension control systems (De Bie et al., 2022), ESC, TVC and various methods of traction control like static, rolling (dynamic), and sliding traction control. The combination of these technologies is being implemented more and more in today's EV.
The paper reviews ITVC techniques, evaluates their effectiveness in energy optimization, computational efficiency, efficiency, timeline and compares multiple control strategies to highlight their advantages and limitations. Through already made simulation-based analysis, this paper quantifies and compares the impact of various ITVC methods on key vehicle performance metrics, such as yaw stability, lateral acceleration, and energy consumption (kWh), of vehicle with and without torque vectoring.
By analyzing computational efficiency and real-time feasibility of different ITVC strategies. The computational load associated with Fuzzy Logic (Herath et al., 2024), Model Predictive Control (MPC) (Guo et al., 2024; Hajiloo et al., 2023; Liang et al., 2025), Reinforcement Learning (DDPG) (Deng et al., 2023), and BP Neural Network-based PID controllers is compared to identify their practical applicability in real-time vehicle control systems.
This paper presents a comprehensive review of ITVC systems, a vehicle dynamic control method, offering an overview of available techniques and comparing simulation results to illustrate the advantages and limitations of key strategies. This paper presents a review of ITVC systems, a vehicle dynamic control method, offering an overview of available techniques and comparing simulation results to illustrate the advantages and limitations of key strategies.
Principle of torque vectoring
Torque vectoring control (TVC) (Torque-vectoring.belisso.com, 2009) strategy given in Figure 1 generally consists of:
Reference Generator: Determines the target yaw rate dynamically, factoring in the current steering angle and vehicle speed to achieve a desired optimal understeer behavior. High-Level Controller: Calculates necessary traction/braking force and yaw moment by referencing pedal inputs and the error between the desired and actual yaw rates. Low-level controller: A low-level controller aims to distribute torque between the wheels to achieve specific vehicle dynamic responses, such as minimizing yaw rate error and improving handling and stability Figure 2.
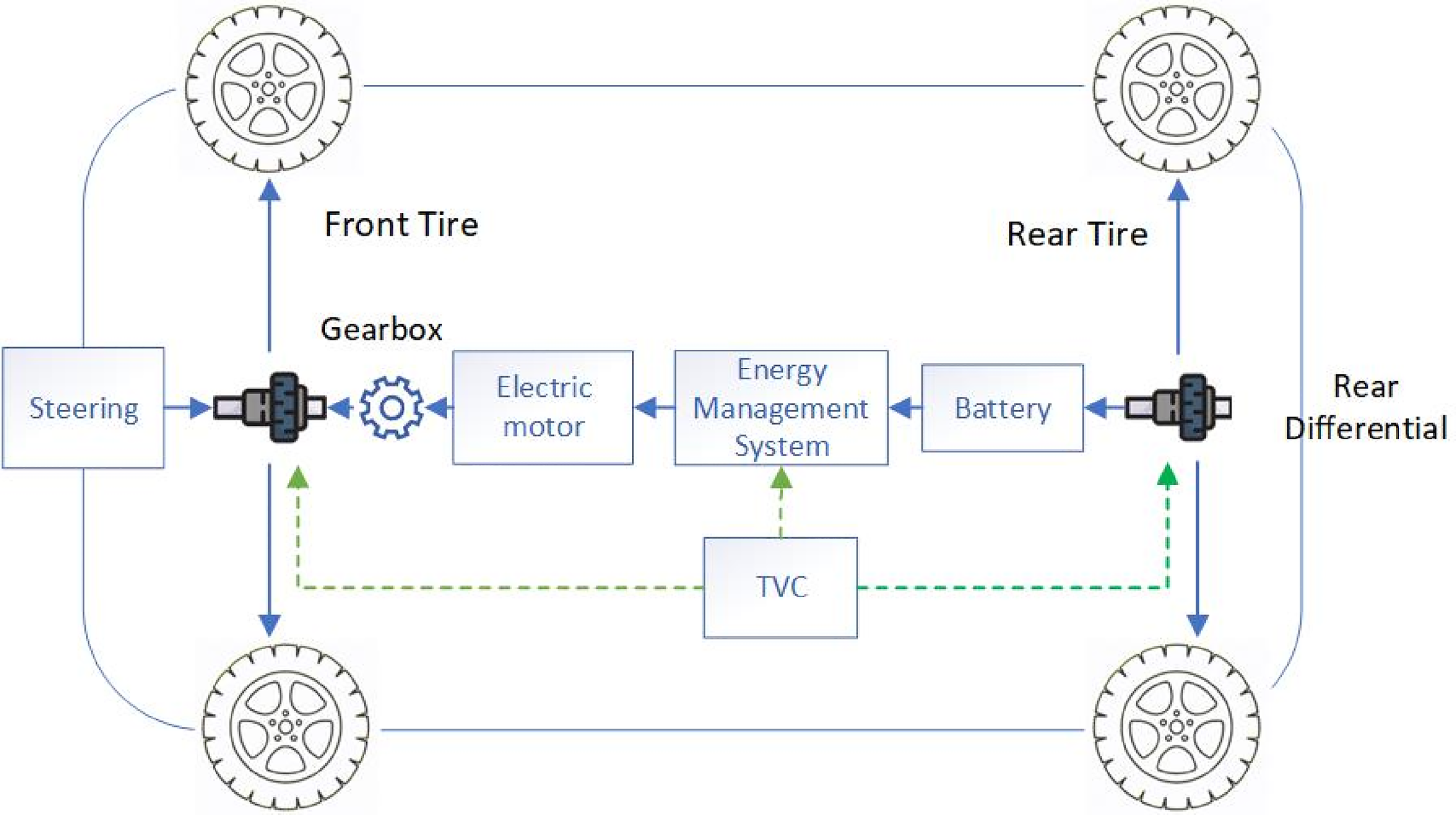
Topology of 4-wheel EV with TVC.
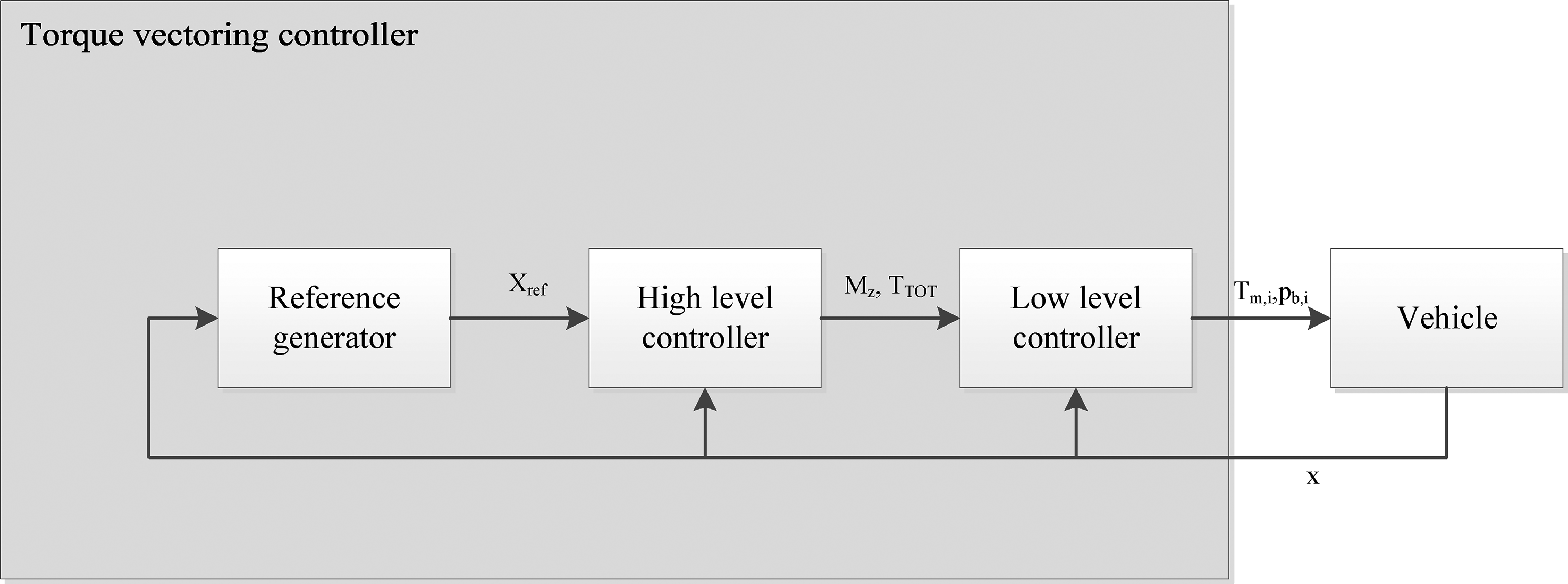
TVC general scheme.
Reference generator
In TVC, the reference generator (Fujimoto et al., 2004; Hancock et al., 2005) sets the target dynamic behavior of the vehicle. The system calculates the target yaw rate (x) dynamically, drawing on inputs such as steering angle and vehicle speed, and other relevant driver inputs to achieve optimal vehicle behavior, such as improved cornering or stability during maneuvers. Additionally, it generates reference values for key parameters like yaw rate and sideslip angle, which are essential for maintaining vehicle stability and handling. These reference values guide the high-level controller in ensuring the vehicle follows the desired understeer characteristics or meets specific handling performance goals.
In more advanced systems, the reference generator adapts its calculations based on varying conditions, such as the driver's intentions or the vehicle's dynamic state. For instance, it may adjust the understeer gradient to provide more precise control under different driving scenarios, including sporty or energy-efficient modes. Ultimately, the reference generator plays a crucial role in ensuring the vehicle maintains its intended path and stability by providing the high-level controller with the necessary reference values.
In TVC systems, the reference generator calculates a target yaw rate (and sometimes a sideslip angle) using the driver's steering input and the vehicle's speed. The reference for yaw rate is generally based on the steady-state understeer gradient and is mathematically expressed as in equation (1).

High-level controller
Receiving driver inputs, vehicle states, and reference generator outputs, the high-level controller (Canale et al., 2007) calculates the total driving torque (TTOT) and required yaw moment (Mz) for optimal vehicle control. It uses two parallel logics to compute its outputs.
The drivability controller sets the total torque demand, converting accelerator pedal input into a torque reference for the engine or motors via drivability maps, thus meeting driver requirements (Esmailzadeh et al., 2003).
Using a range of control strategies (Chong et al., 1996), the TVC determines the desired yaw moment (Mz) for the vehicle to improve stability and handling, as shown in equation (2).

Low-level controller
With the total driving torque and yaw moment demand as inputs, the low-level controller (Shin-ichiro et al., 2000) determines the torque demand for each motor (
The low-level torque distributor is generally designed in one of two ways (Chen et al., 2013): a fixed front-to-rear distribution or an optimal torque allocation to each wheel. This optimal strategy can either prioritize balanced tire adherence or enhance energy efficiency. When energy efficiency takes precedence, the high-level and low-level controllers are often designed together, optimizing the yaw moment for energy savings, sometimes at the expense of handling.
Responsible for torque distribution between the left and right wheels, the low-level controller in a TVC system operates based on yaw rate error or other goals required from the controller like longitudinal stability, lateral stability, slip ratio control, path following etc. The control objective for obtaining yaw rate comprises yaw rate error, control law, wheel torque allocation, and actuator dynamics.
Yaw rate error
To obtain the desired yaw rate for adjusting the vehicle corrective yaw in real time

Control law
The low-level controller typically uses a PID controller to compute the differential torque

Wheel torque allocation
The differential torque


Actuator dynamics
The actual torque applied by the actuators (e.g., electric motors or brakes) typically follows a first-order response due to physical limitations like actuator delay. This can be modeled for both left wheel and right wheel using equations (7) and (8):


Artificial intelligent methods
AI methods consist of diverse techniques as shown in Figure 3 are algorithms that allow systems to carry out tasks usually requiring human intelligence, such as decision-making, learning, problem-solving, and pattern recognition. These methods equip machines to perceive reason, learn, and operate intelligently, and they are classified according to how they replicate aspects of human cognition.
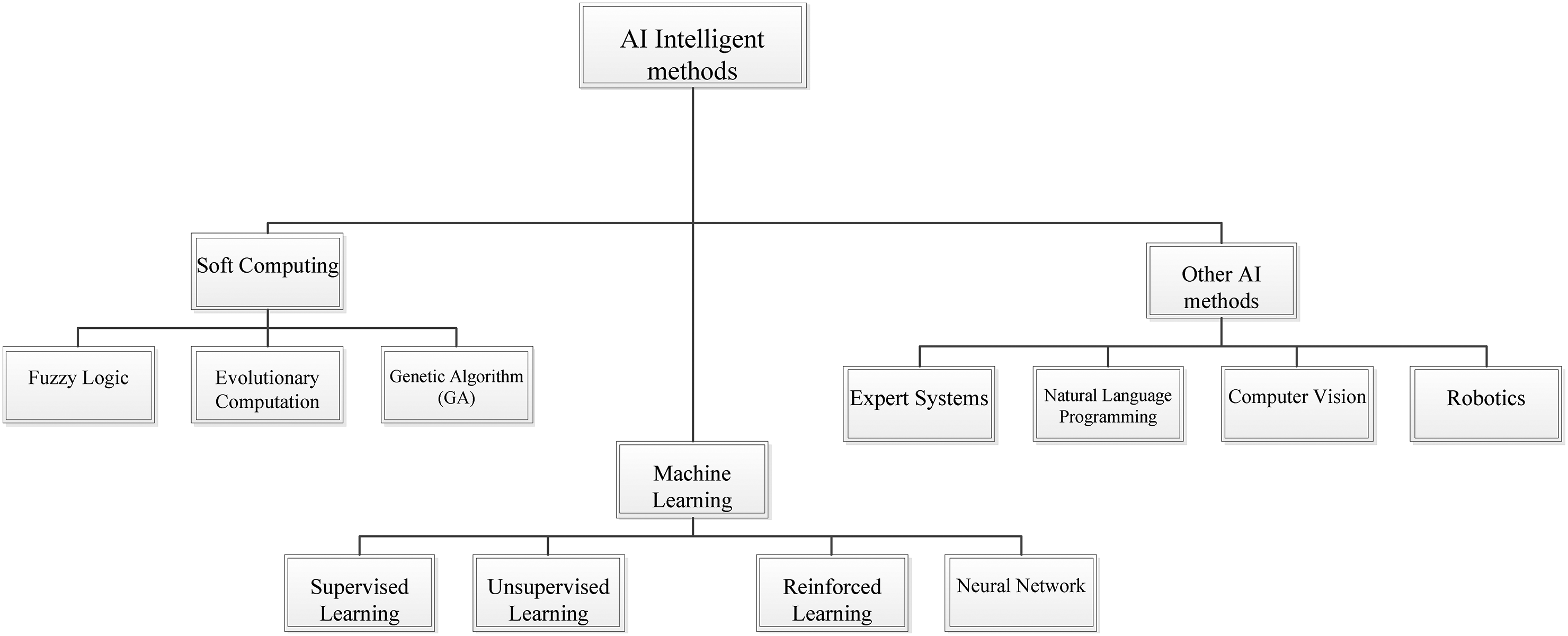
Artificial intelligence methods.
Soft computing
Soft computing (Karray and de Silva, 2004; Kecman, 2001) is a field within computational intelligence focused on solving complex, real-world problems where traditional, precise methods are inefficient or impractical. Unlike hard computing, which depends on exact, binary logic and deterministic models, soft computing utilizes approximation and reasoning techniques to manage uncertainty, imprecision, and partial truths.
Inspired by human problem-solving methods relying on intuition, learning from experience, and handling incomplete information soft computing excels at providing robust, approximate solutions rather than precise, optimal ones. This makes it particularly effective in areas such as pattern recognition, optimization, and control systems. They contain methods like Fuzzy logic, Evolutionary computation, Genetic algorithm etc.
Machine learning
Machine learning (ML) (IBM, 2021) is a branch of AI that allows computers to learn from data, enabling decision-making and prediction without explicit programming. It focuses on designing algorithms and models that recognize patterns, learn from experience, and improve over time by processing large datasets. The objective is to create adaptable systems that handle new data and evolving situations with minimal human oversight. Common ML techniques include supervised learning, unsupervised learning, reinforcement learning (RL) (Sutton and Barto, 2015), and neural networks (NN) (Haddoun et al., 2008).
Other AI methods
They are methods like Expert systems (Jackson, 1998) where it aims to replicate the decision-making capabilities of human ability to solve complex problems by reasoning through a knowledge or rule based, frame based or Fuzzy based (Bai and Wang, 2006) systems. Natural language processing (Bird et al., 2009) where instructions are written in human language, allowing users to interact with and instruct computers using natural, conversational language instead of precise syntax code. Computer Vision (Morris, 2004) where data are feed to the system through image and videos of people and robotics where the internal working is being continuously updated to achieve perfect autonomy.
ITVC (Broggi et al., 2016; Parra et al., 2018) purpose is to use emerging technologies to correct the advanced driver assistance system (ADAS) systems, the electronic systems in EV that uses advanced technologies (sensors, cameras, radars, and software) to assist drivers in driving tasks and improve vehicle safety. ADAS technologies aim to reduce human error in driving by offering assistance, warnings (Zhang et al., 2021), and even automated interventions to prevent accidents or make driving more comfortable (Bertipaglia et al., 2024). They range from simple features like lane departure warnings to more complex systems like adaptive cruise control and autonomous emergency braking to an optimal balance between computational cost and performance (Lenzo et al., 2024). The TVC uses these computational technologies to increase the efficiency, performance, stability, driving conditions, etc. In this method, they are utilized in either the lateral or longitudinal side or both depending upon the author.
As compared to traditional TVC, ITVCs, shown in Figure 4, are being used less as it is currently an emerging technology and not everyone is used to intelligent methods. Having said that, this exists some ITVC methods, those are:
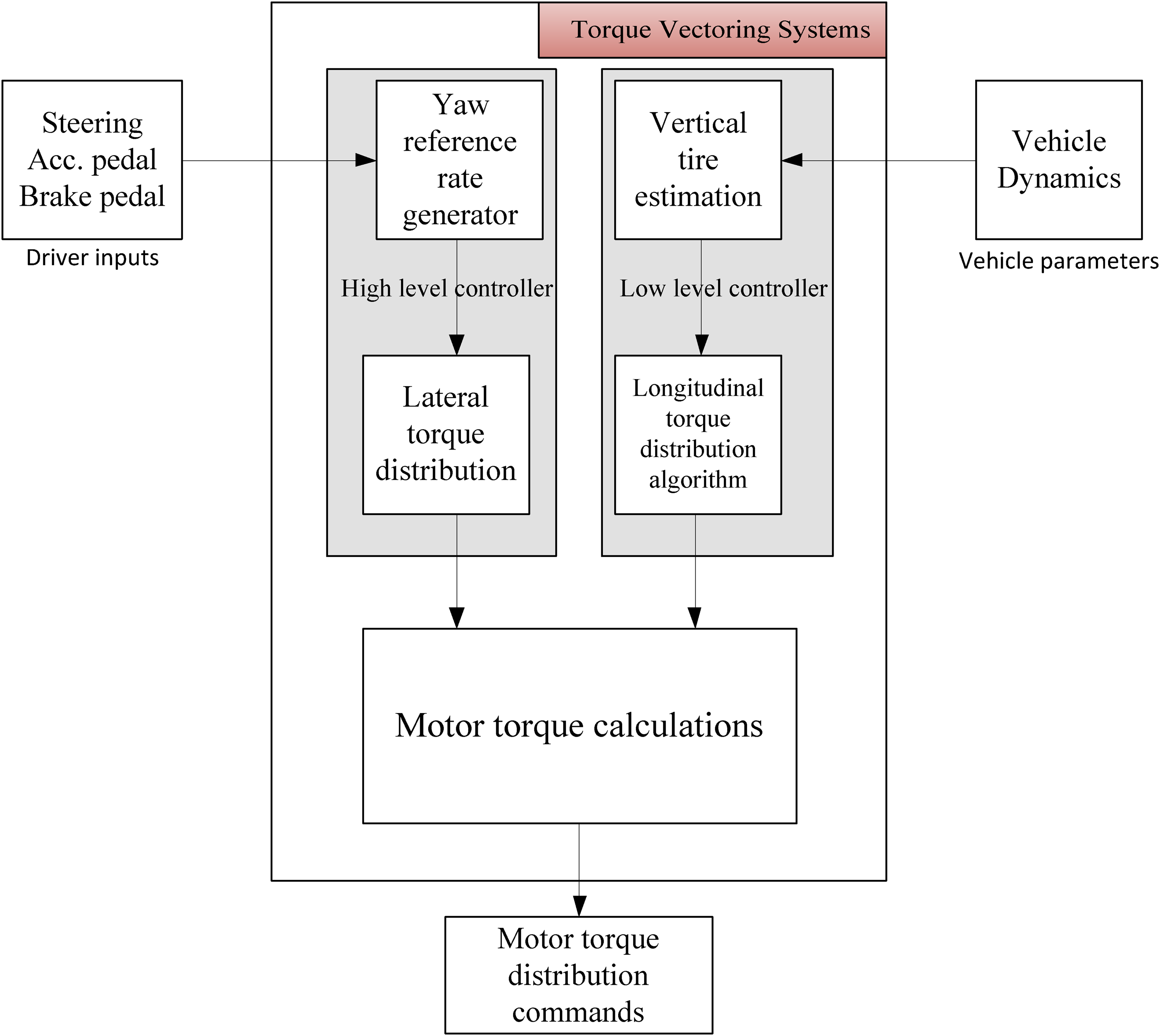
Intelligent TVC system.
Adaptive Neuro-Fuzzy Inference System (ANFIS)
ANFIS (Jang, 1993) system provides real-time and accurate estimations of vertical tire forces, which are crucial for torque distribution in electric vehicles. Unlike traditional estimators, this ANFIS-based approach relies exclusively on measurable variables, avoiding the need for complex or hard-to-measure inputs. The system, shown in Figure 5, combines fuzzy logic's interpretability and NN learning capability, enabling the adaptive tuning of fuzzy rules and membership functions. This provides more accurate estimations compared to traditional analytical methods, particularly during transient conditions, and demonstrates a significant improvement in dynamic handling and vehicle stability (Wong and Ao, 2024).
ANFIS structure (Haddoun et al., 2008).
The system outperforms traditional methods, such as PID-based controllers (Abdolrasol et al., 2022; Wang et al., 2007) by effectively reducing understeer and enhancing cornering abilities through better torque distribution. The approach not only enhances vehicle dynamics but also contributes to a 10% increase in energy efficiency, demonstrating the system's potential for ADAS in EV.
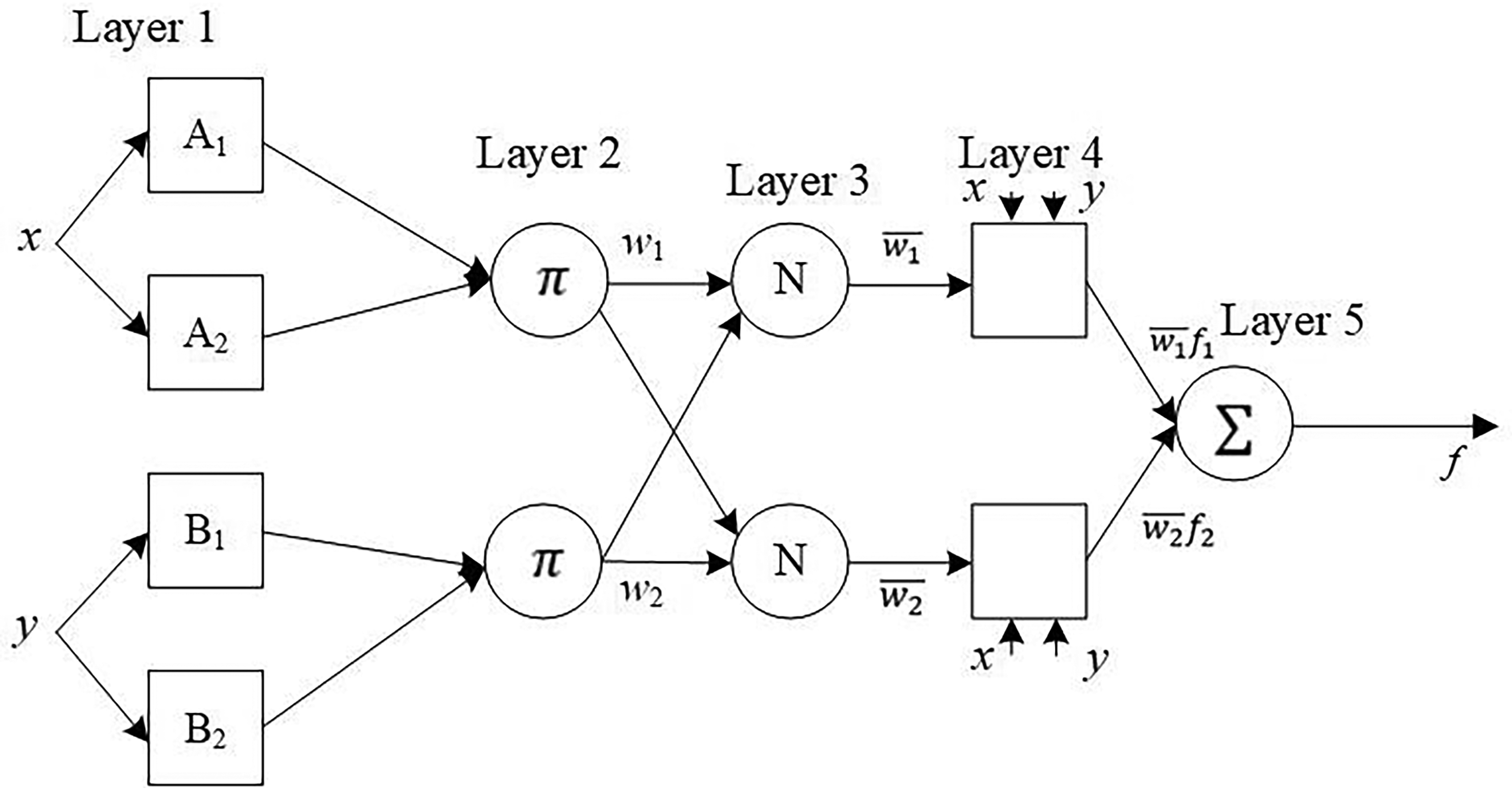
An elementary Sugeno first order ANFIS model (Al-Hmouz et al., 2012) with two inputs, x and y, incorporating two fuzzy if-then rules outlined in equations (9) and (10):


Layer 1 is shown by equation (11) is the input layer

Layer 2 is the rule layer

Layer 3 is the layer of normalization

Layer 4 is the output layer

Layer 5 is the summation layer

This gives the final ANFIS formula equation (16) where,

Fuzzy logic controller
A fuzzy logic controller (FLC) (Abdolrasol et al., 2023; Kahveci et al., 2013), controls lateral torque distribution by determining the torque needed on each side of the vehicle, based on yaw rate and sideslip angle, and adjusts it with fuzzy rules for enhanced stability. Steps for FLC include:
Fuzzification: Translates crisp inputs into fuzzy values by assigning them a degree of membership within fuzzy sets. For an input variable xxx, the degree of membership in fuzzy set A is denoted by
Inference: Applies fuzzy rules to the fuzzified inputs. The rules are usually shown as ‘if-then’ statements, such as:
Rule 1: If Rule 2: If
Firing strength rule of each is given in equations (17) and (18) calculated using a logical operation such as the min (AND) operator:


Aggregation: The fuzzy sets from each rule’s output are aggregated into a single fuzzy set, as given in Equation (19). Each rule output is scaled according to its firing strength. For example, if

Defuzzification: Changes the fuzzy output set back into a crisp value. The centroid method is the preferred approach, where the crisp output y is determined in equation (20) as:

Back Propagation Neural Network (BPNN)
In BPNN (Geng et al., 2018), the difference from a NNis that during training process the backpropagation algorithm for supervised learning. It automatically adjusts the weights of the network by propagating the error backward from the output layer to the input layer during training, enabling the network to learn and reduce error over time and during error minimization it systematically reduces the error by calculating the gradient of the error function with respect to the network's weights and adjusting them using gradient descent. This allows for iterative learning and improvement. The BPNN uses gradient descent to minimize the loss function and continuously update the weights.
The primary equation for backpropagation is below (21) where it consists of updating the weights in the NN. The update rule for weight wbetween neuron i and neuron j is:

Genetic Fuzzy Yaw Movement Controller (GFYMC)
The controller uses genetic algorithms (GA) to automatically optimize the FLC (Jalali et al., 2013a). The GA searches for the optimal membership function and fuzzy rules by evaluating performances from different configurations and adjusting them over multiple generations. This allows for better adaptation to changing conditions and enhances the controller's performance. It also continuously adapts its fuzzy rules and membership functions based on real-time performance feedback. This results in a more flexible and adaptive control strategy, which is especially useful for complex, dynamic systems like vehicle yaw movement.
By optimizing the parameters using genetic algorithms, the GFYMC provides improved performance in terms of stability, precision, and response to dynamic changes in the vehicle's movement, especially in critical driving situations like cornering and sudden maneuvers.



In GFYMC, GA optimizes the parameters (e.g., c, σ and fuzzy rule set). It evolves a population of candidate solutions over several generations, using operators like:
Selection; chooses the best-performing fuzzy rule configurations. Crossover; combines parts of two fuzzy rule sets to create a new solution. Mutation; randomly modifies parts of a fuzzy rule set to explore new possibilities.
The GA minimizes the yaw error

Through GA, the controller finds the best fuzzy rules and membership functions to minimize this error, providing more accurate and adaptive yaw control.
Neuro-fuzzy controller
A neuro-fuzzy controller (Ulutas et al., 2020) enhances a generic fuzzy controller by introducing learning capabilities, allowing it to automatically tune its rules and membership functions through training. This makes it more adaptive and able to handle dynamic environments while maintaining the interpretability of a FLC.
It is a hybrid system that combines the principles of FLC and NN to improve the adaptability and learning capabilities. It adjusts its fuzzy rules and membership functions automatically based on input-output data using learning algorithms via hybrid method that involves gradient descent or backpropagation.
Structured similarly to a FLC with rules and membership functions, but with the added ability to learn. The NN aspect of the controller tunes the parameters of fuzzy sets and the rules, making it adaptive but retains the interpretability of a fuzzy controller. It adjusts its fuzzy rules and membership functions based on the data it encounters, offering both learning capability and human-readable rule-based decision making. Retains the interpretability of fuzzy logic while incorporating the learning ability of neural networks. The fuzzy rules can be interpreted, but they are adjusted by the NN. The steps for neuro fuzzy controller are given from equations (26)–(28).





Learning:
Deep Deterministic Policy Gradient (DDPG)
Designed for continuous action spaces, this reinforcement learning algorithm uses an actor-critic structure with deep neural networks to approximate the policy (actor) and value function (critic). DDPG is a model-free (Silver et al., 2014) off-policy approach that benefits from experience replay and target networks to make training more stable and efficient. The DDPG Reinforce Learning method is shown in Figure 6.
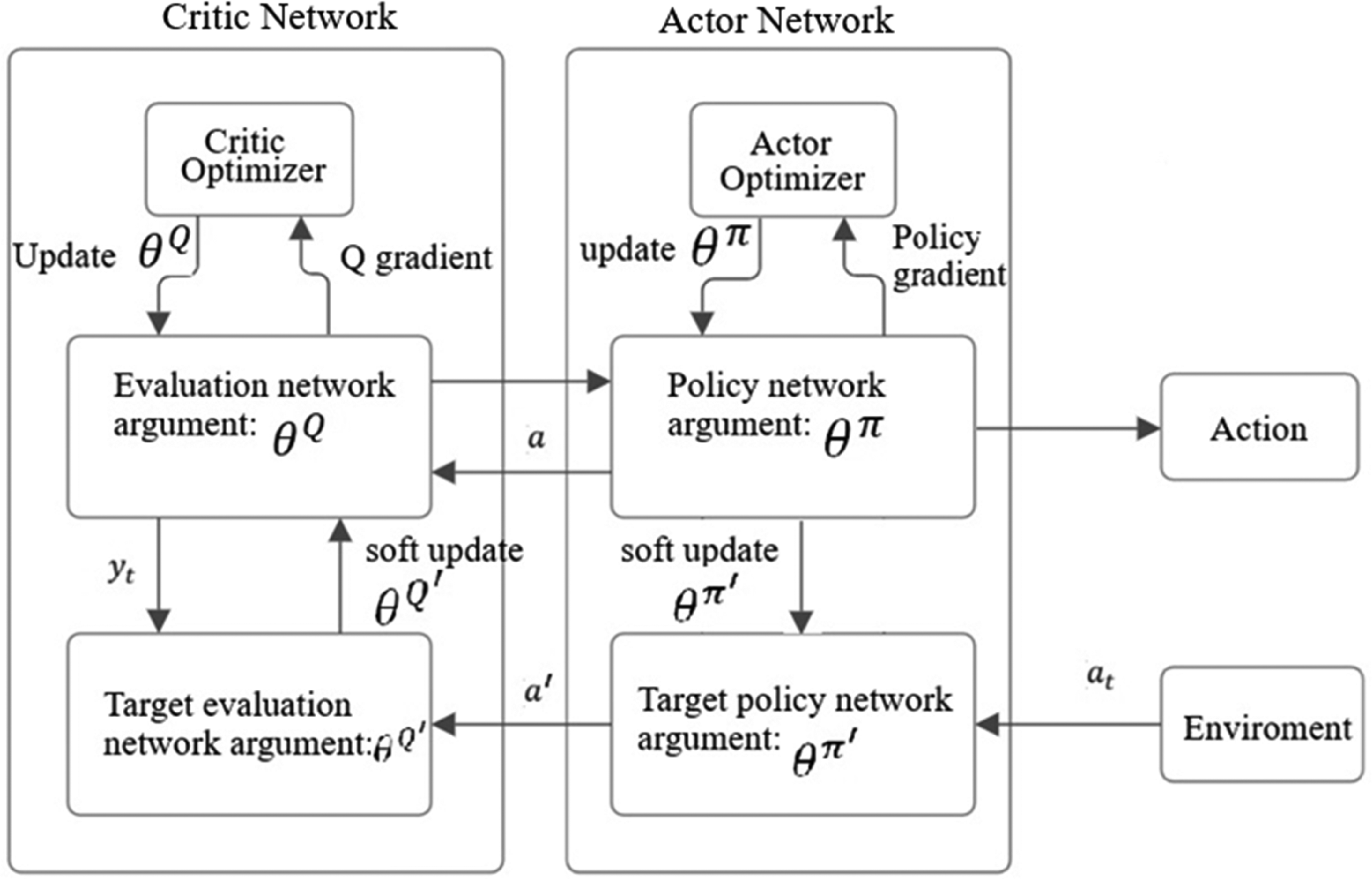
DDPG reinforce learning method (Guo et al., 2020).
Actor: The actor (

Critic: The role of the critic (

Critic Loss function: Training of the critic network given in equation (31) involves minimizing the mean squared error between its predicted Q-values and the target values.

Actor update: The actor is adjusted based on the gradient of the critic's value function with respect to actions, pushing the actor toward actions that maximize the Q-value, the adjusted value is given in equation (33) as

Target network update: The target networks are updated softly using


where,
Neural network
Neural networks (NNs) (Dendaluce Jahnke et al., 2019) are increasingly being used in torque vectoring control systems due to their ability to model complex nonlinear dynamics and adapt to real-time conditions. In a vehicle with torque vectoring, the distribution of torque between the wheels is crucial for optimizing handling, stability, and traction (Gao et al., 2024). Traditional control methods such as Proportional-Integral-Derivative (PID) or rule-based controllers may not fully adapt to varying road conditions, driving styles, and vehicle dynamics. Neural networks offer a powerful alternative by learning optimal control strategies from data and making real-time adjustments based on sensor inputs. The general figure for NN is given in Figure 7.
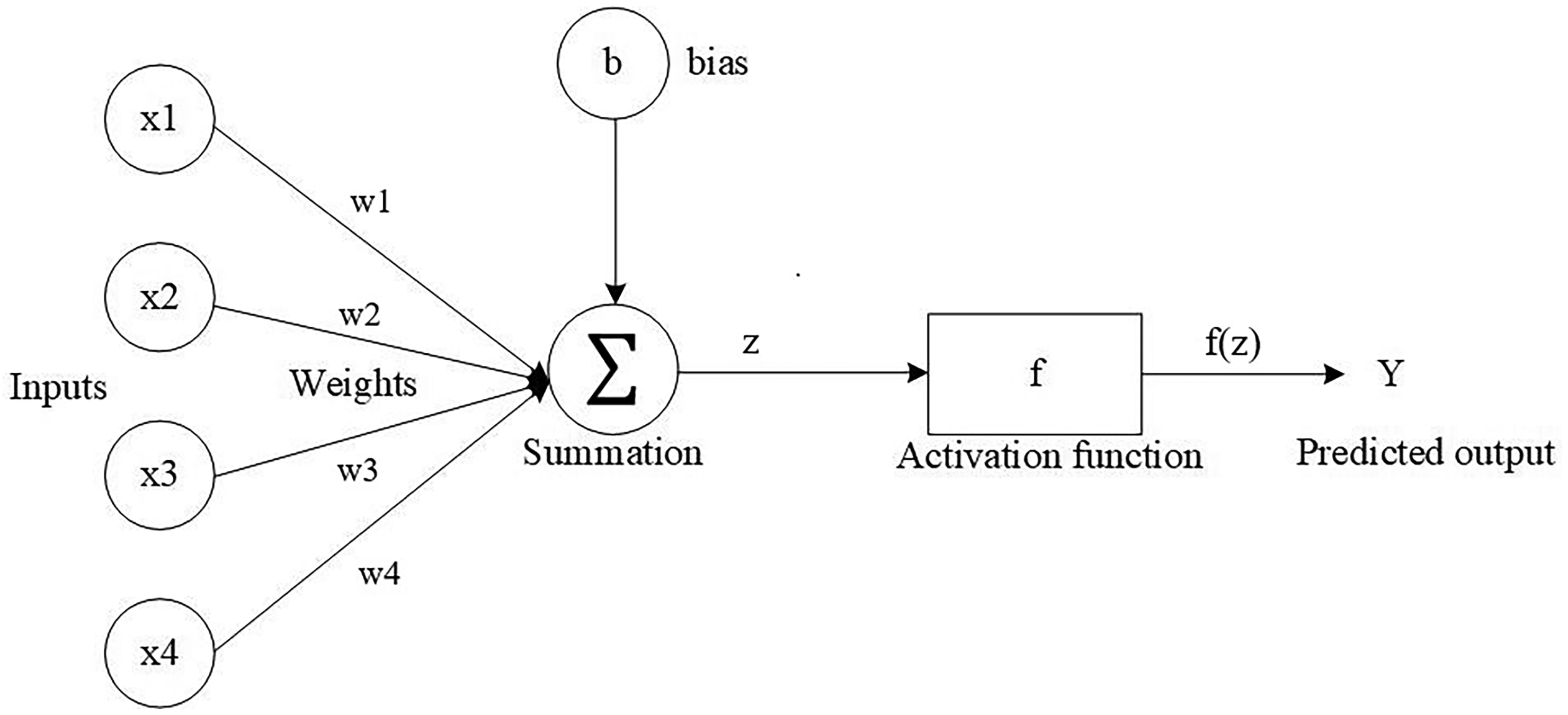
Neural network.
Weighted sum: Each input

Activation function: The weighted sum z is passed through an activation function f(z) to introduce non-linearity.

Output: The result a from the activation function is the final output y of the NN:

The list of intelligent TVC methods using AI methods is listed under Table 1 and the method of implementation differs from author to author as shown:
List of intelligent TVC method and implementation

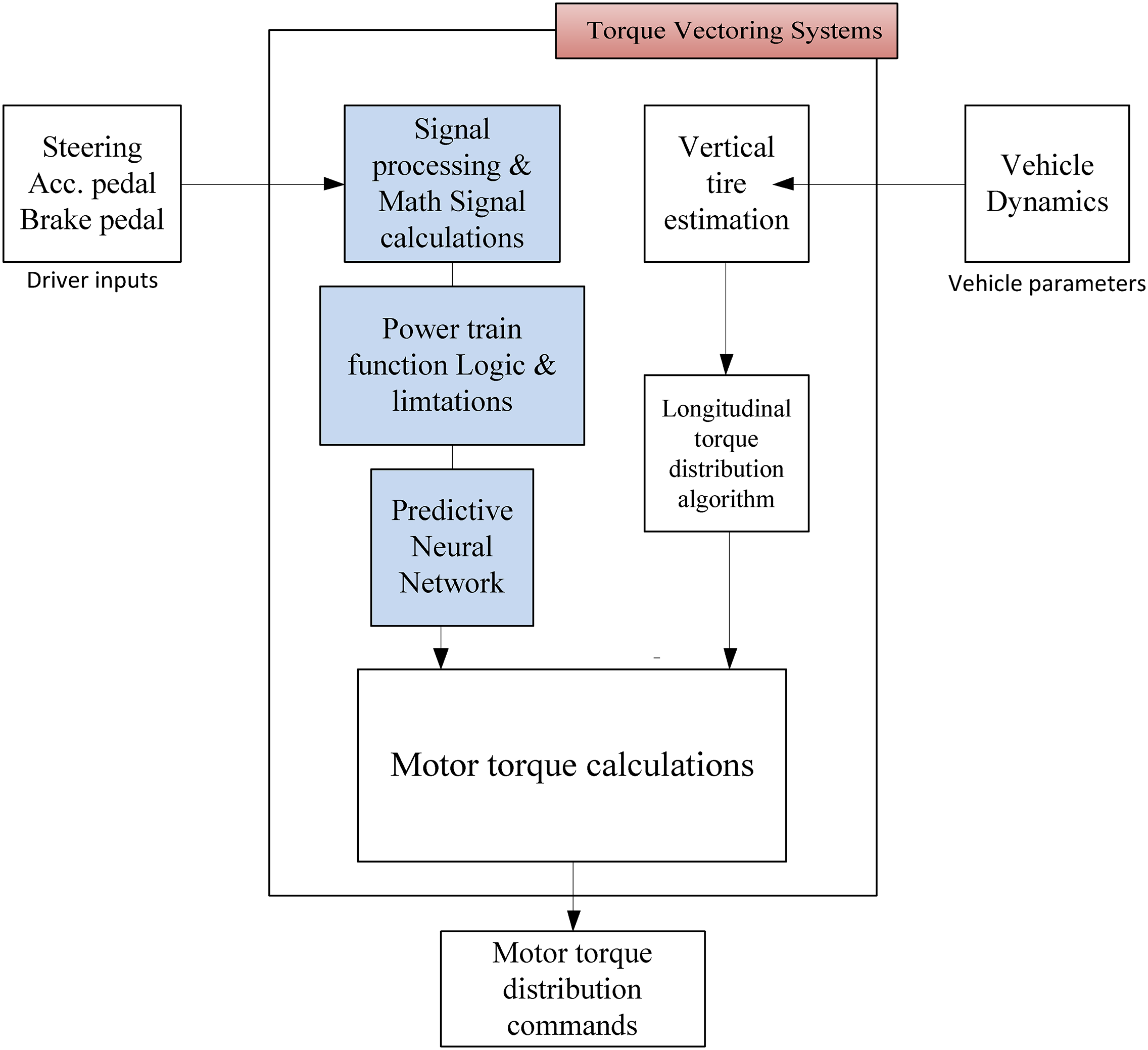
ITVC using predictive neural network.
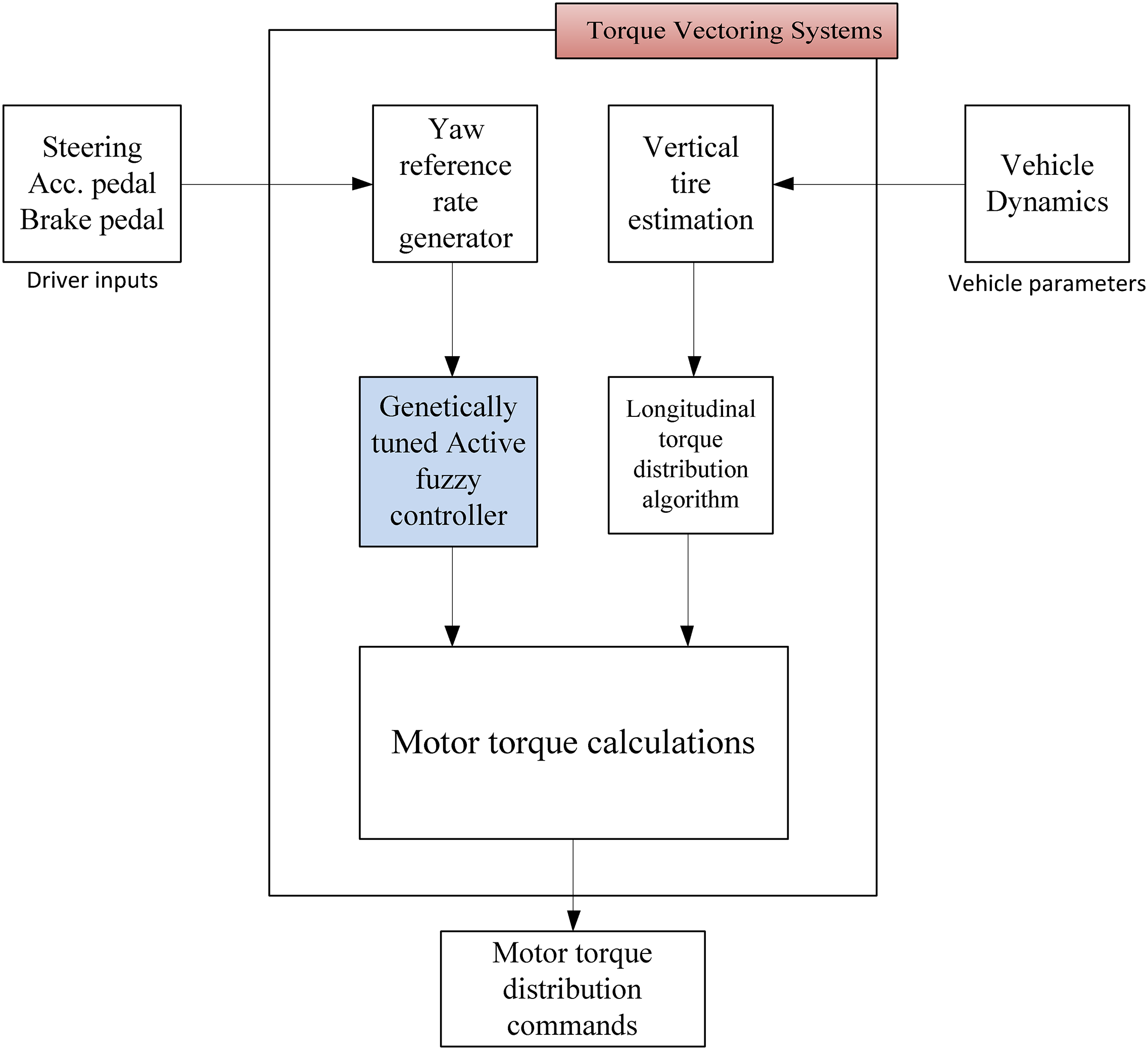
Genetically tuned fuzzy active steering control ITVC method.
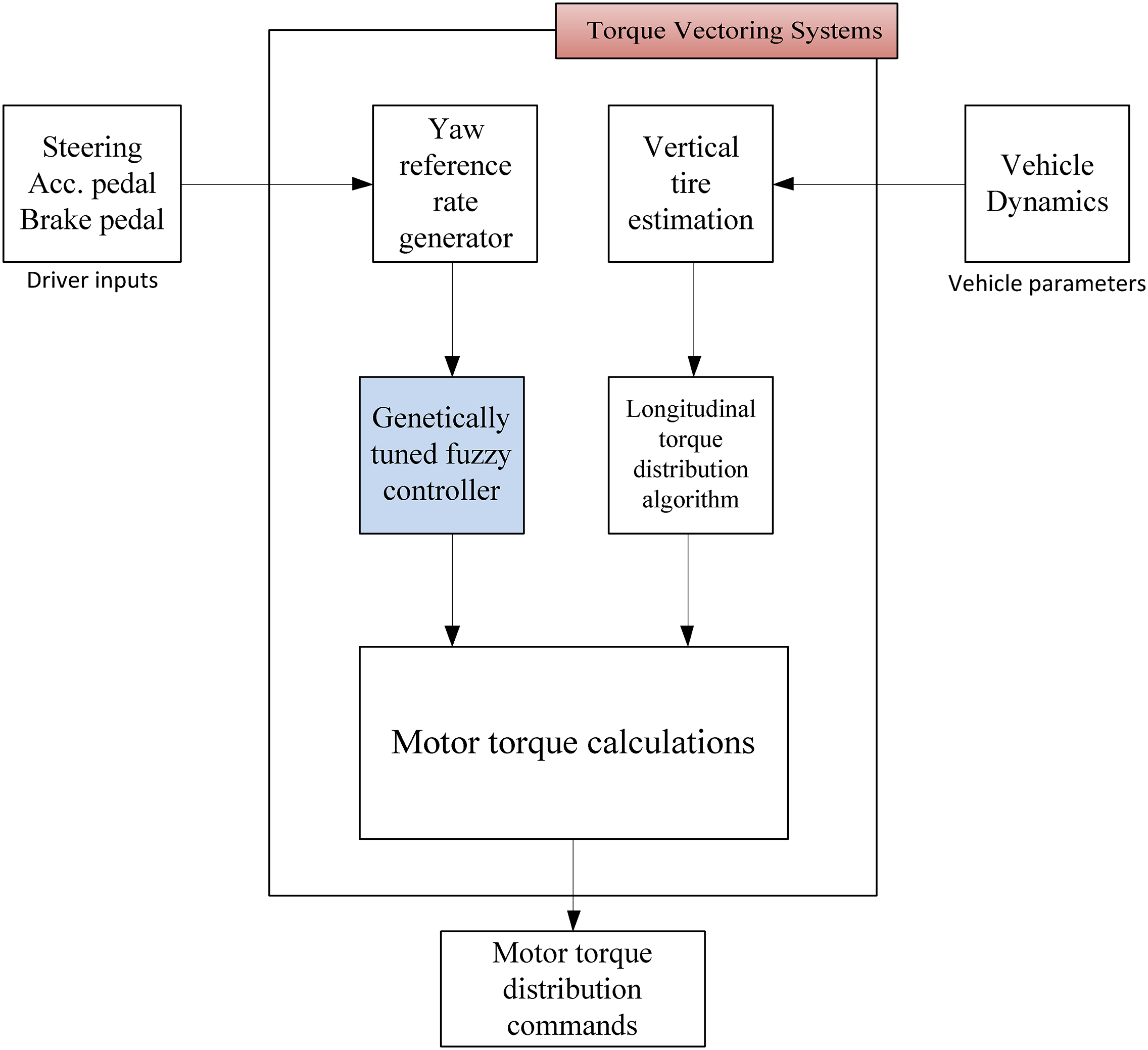
Genetically tuned fuzzy control for ITVC.
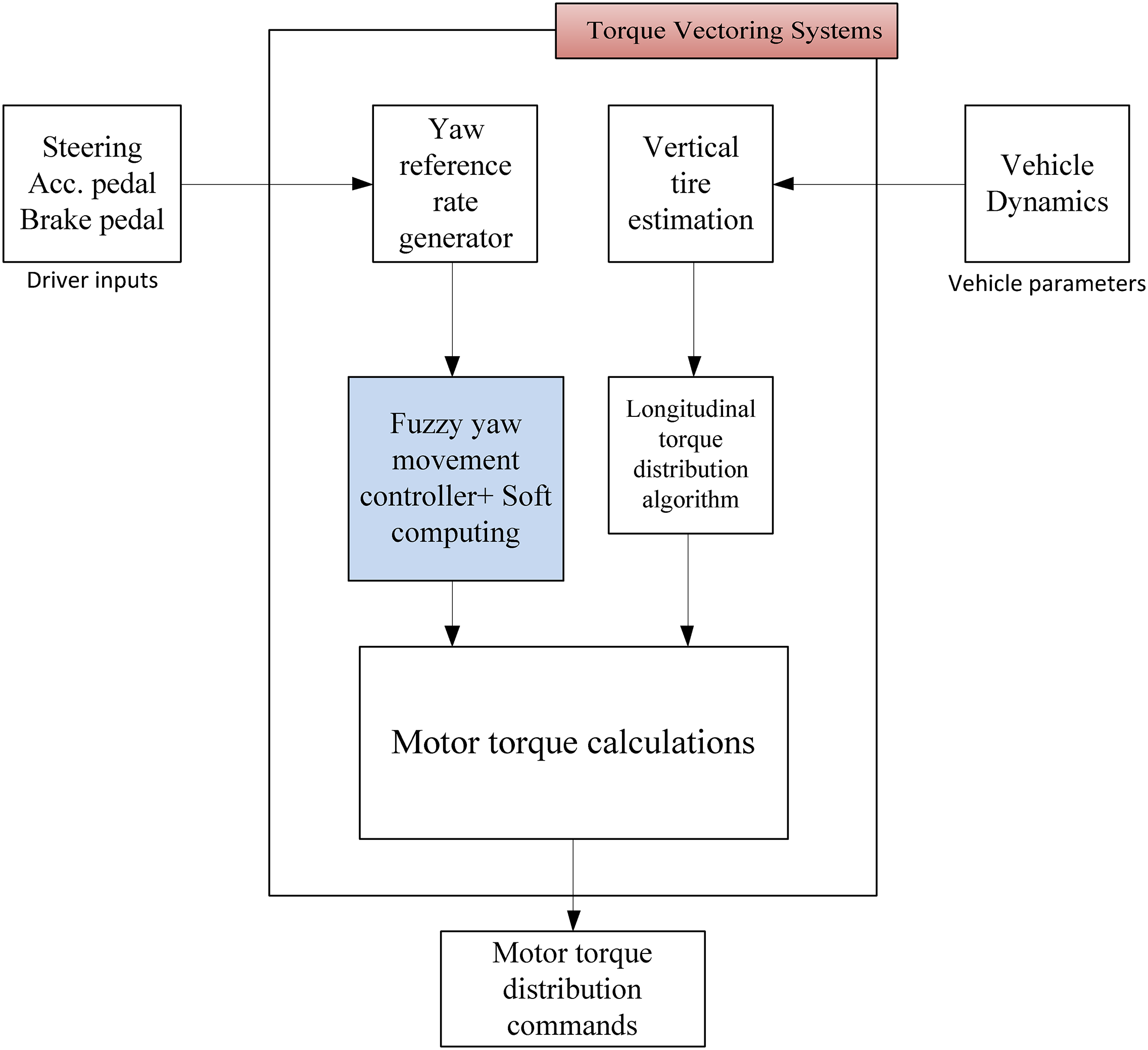
ITVC with FLC and soft computing.
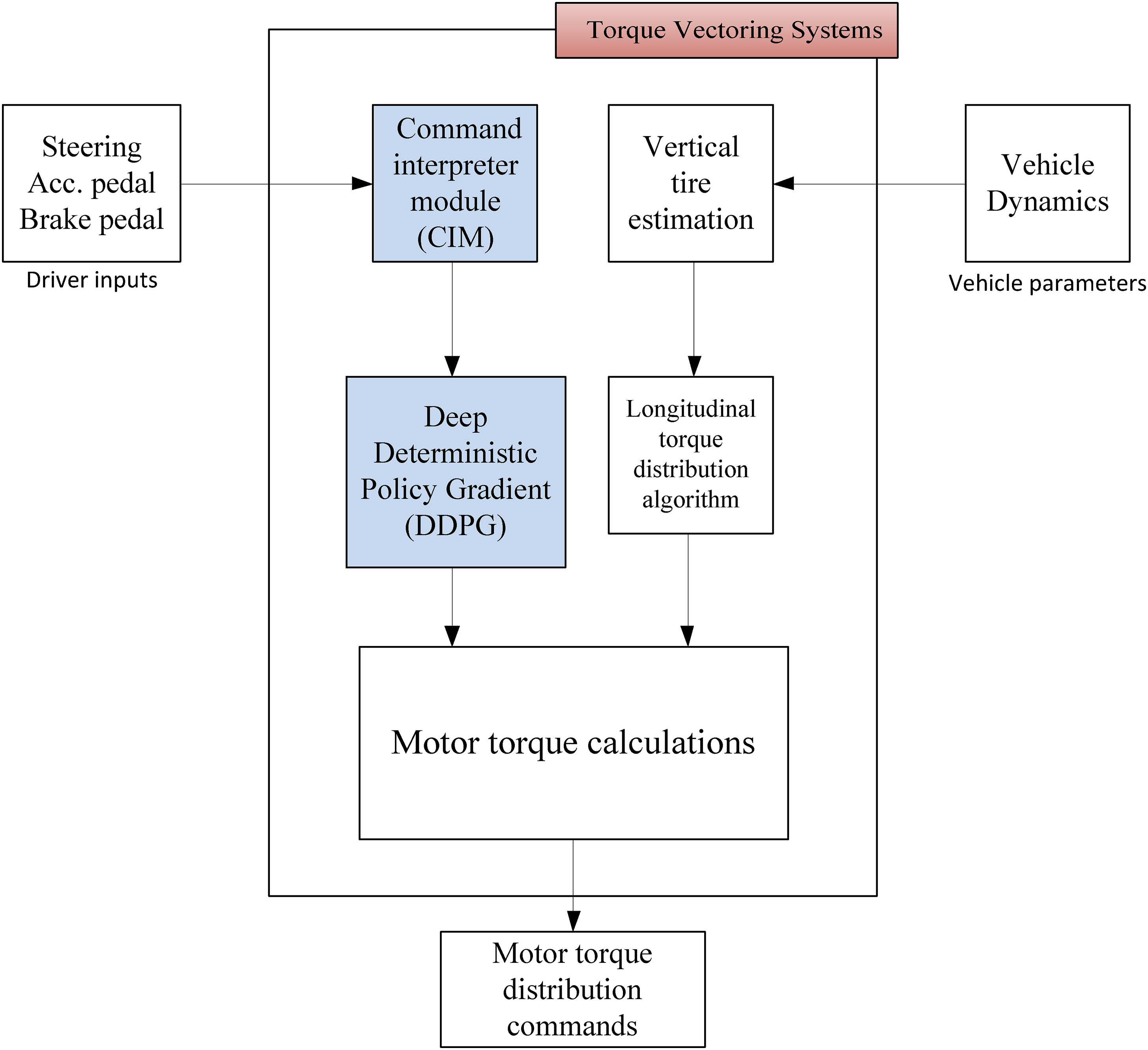
ITVC using RL and DDPG algorithm.
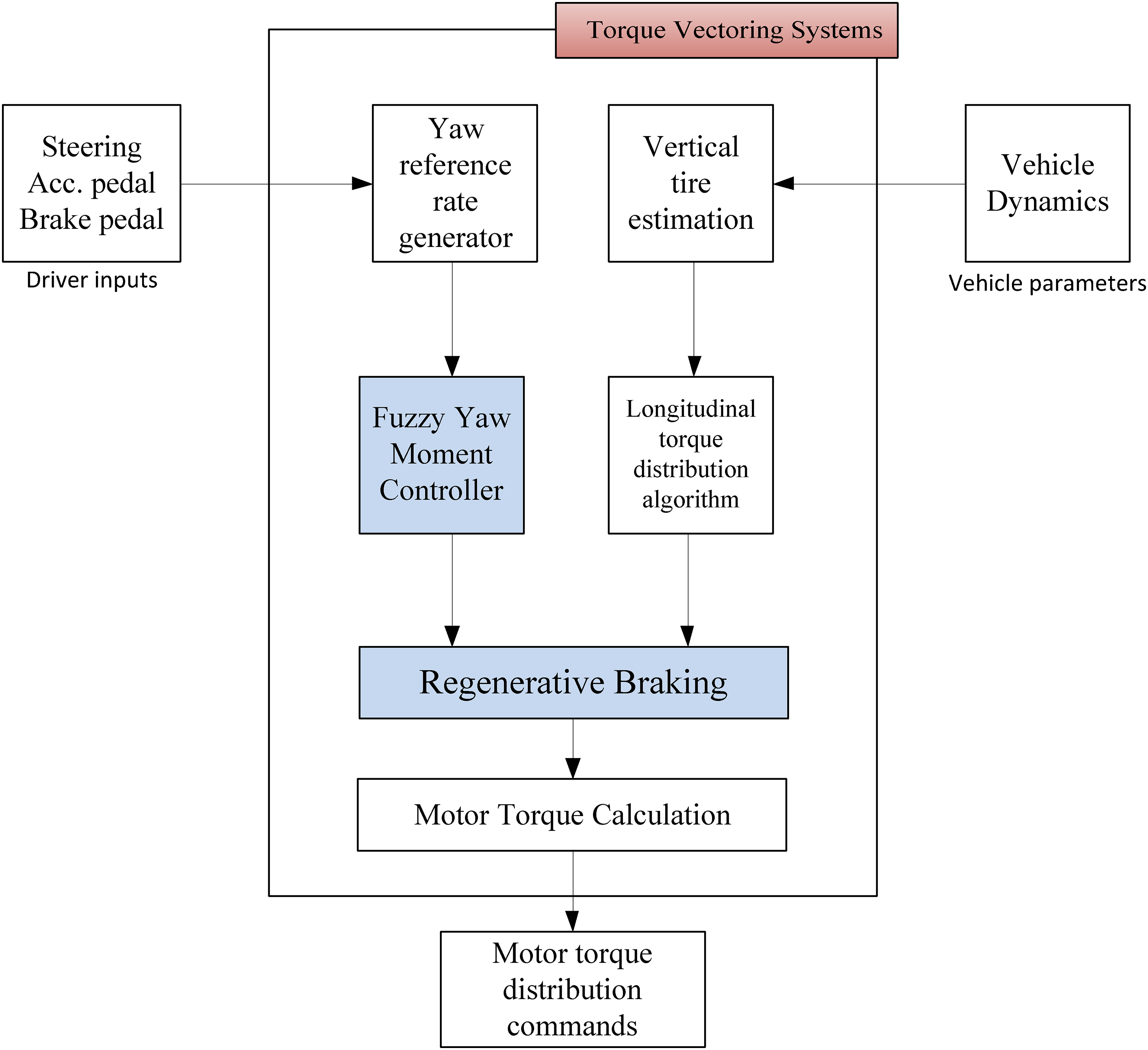
ITVC using fuzzy and NN method with regenerative braking.
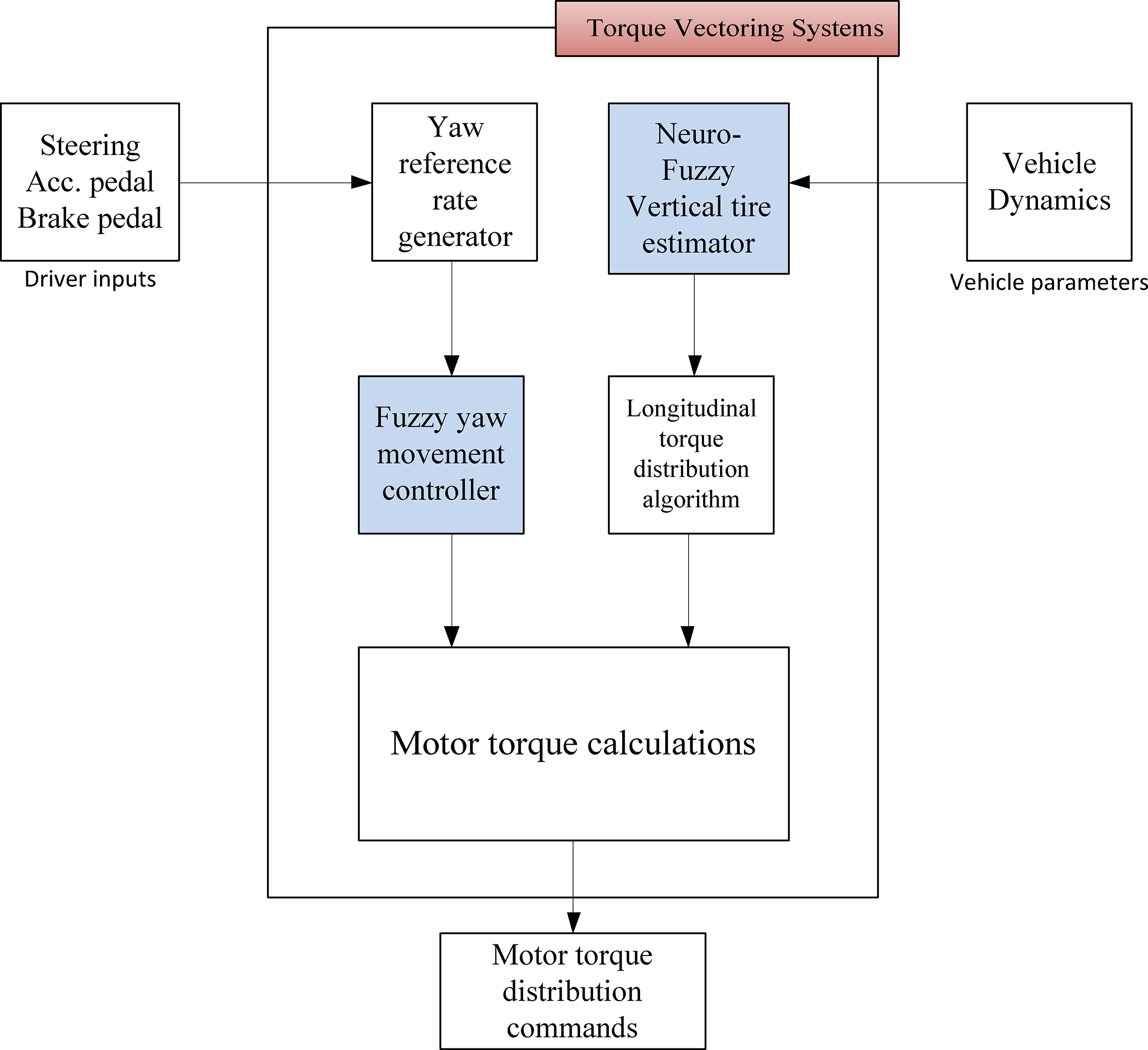
ITVC using fuzzy and vertical tire estimator.
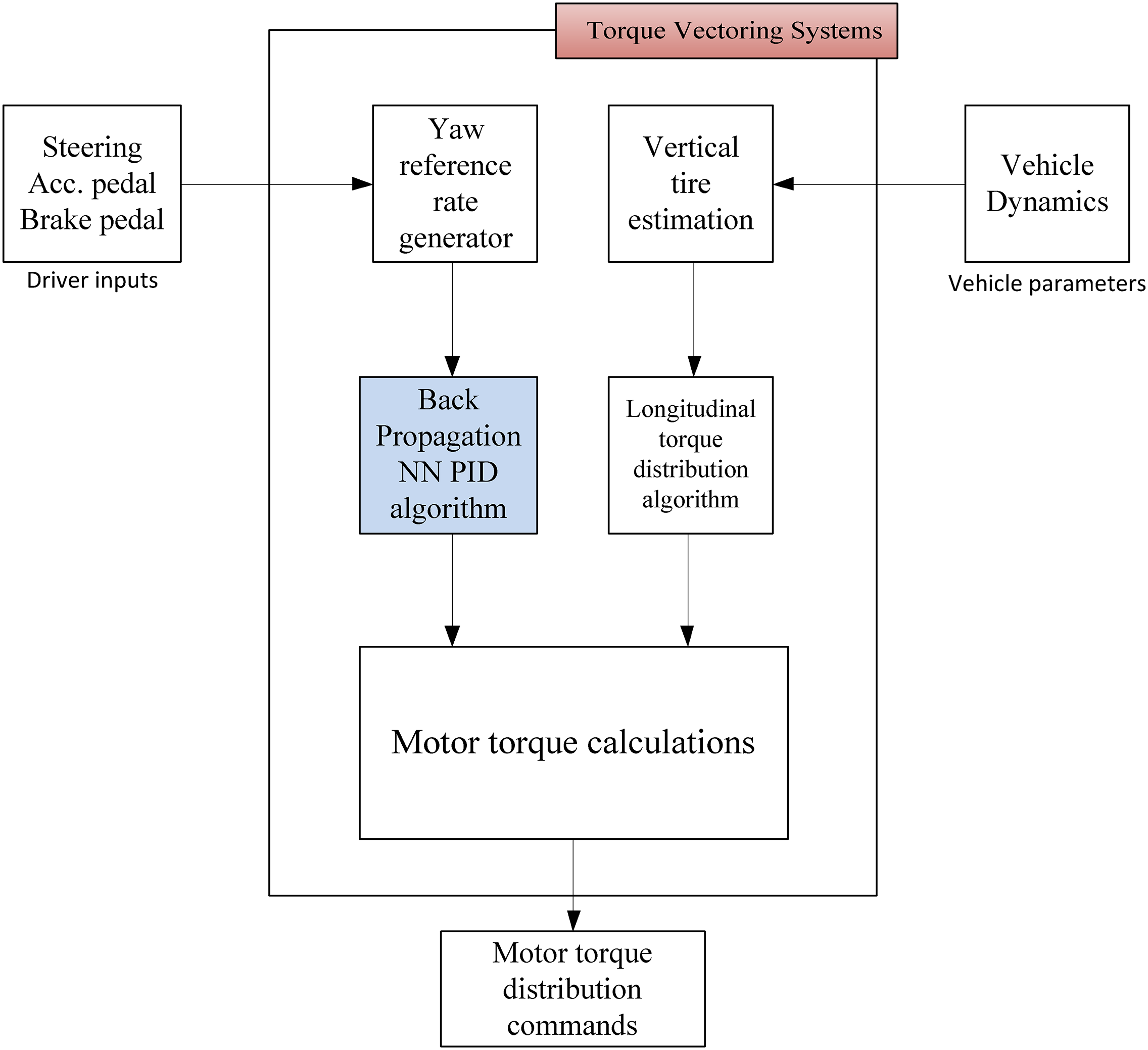
ITVC using back propagation NN.
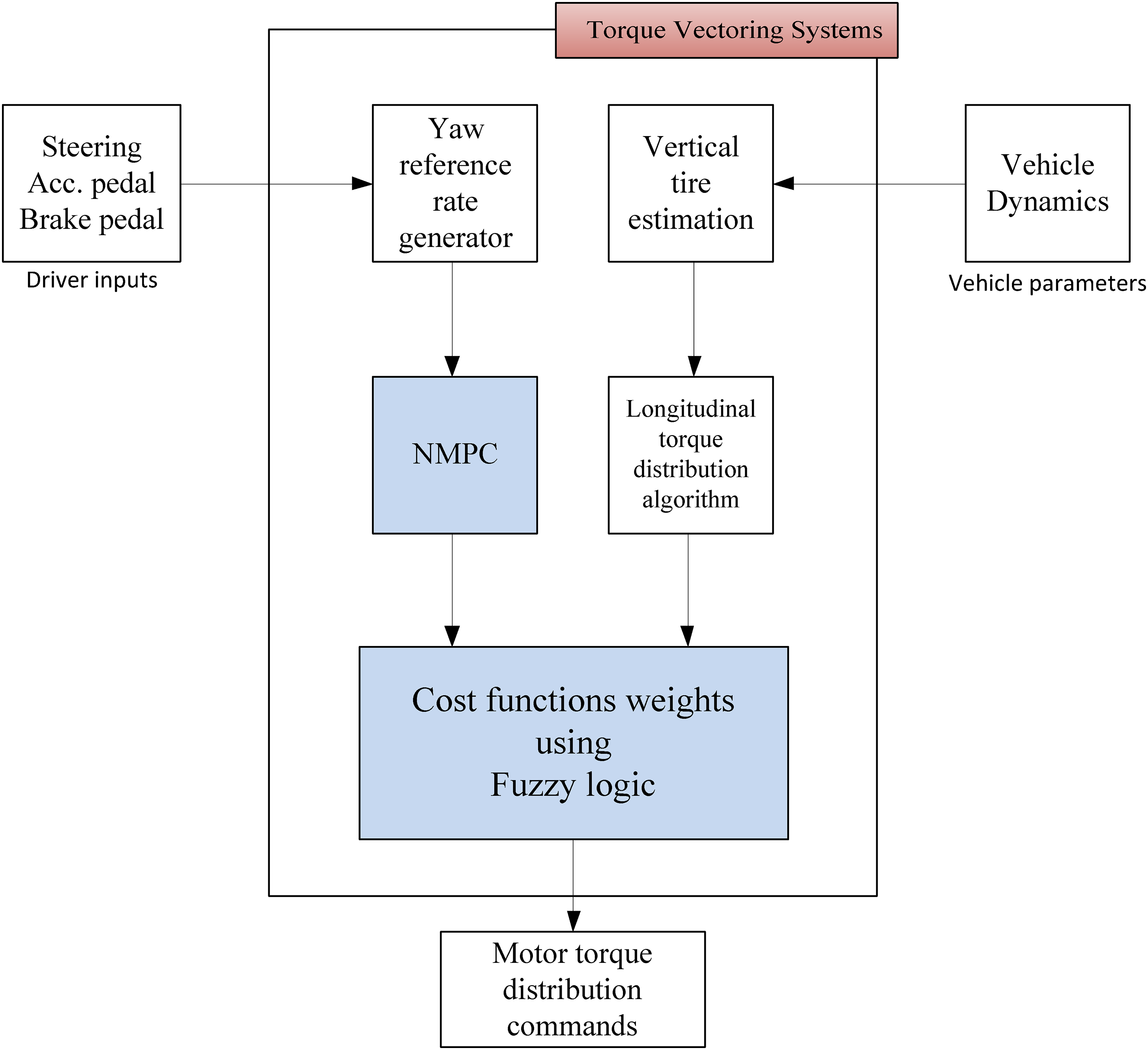
ITVC using NMPC and fuzzy logic based weight adaptation.
By analyzing key dynamic parameters such as maximum sideslip angle
Lower values indicate better yaw control and reduced sideslip, meaning the vehicle maintains a more controlled trajectory. The range from 4° to 13° shows that different controllers have varying effectiveness in managing lateral slip.
Vehicle body roll
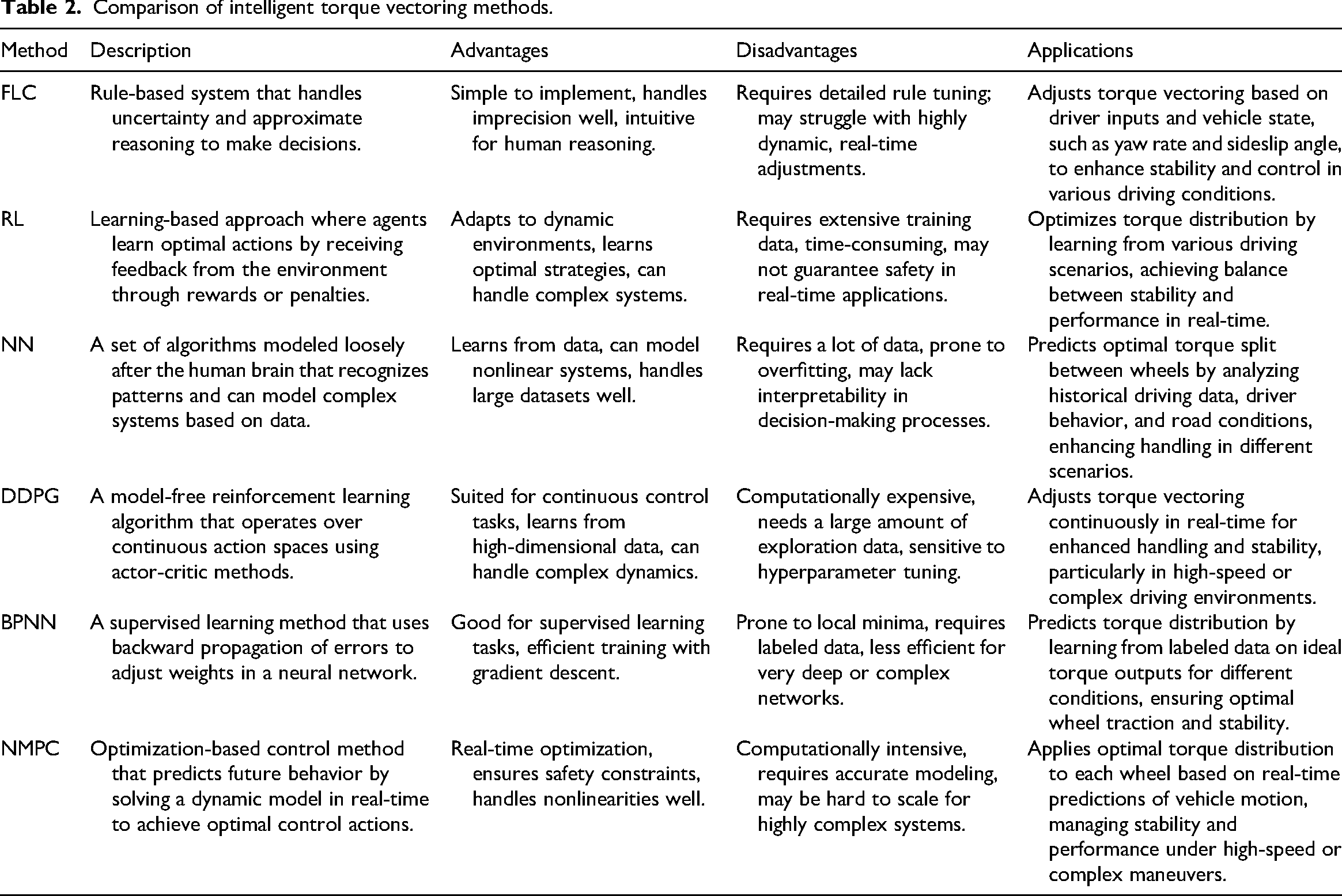
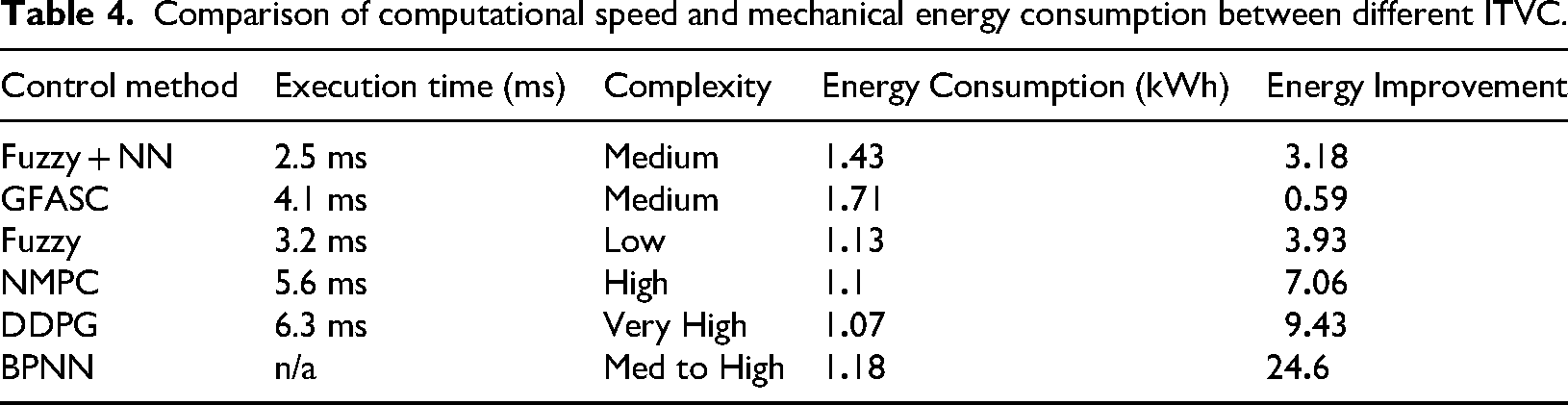
A higher roll angle can indicate more lateral weight transfer, which may affect stability. The values range from 9° to 13°, showing differences in how torque vectoring systems influence body roll. Table 2 provides a qualitative comparison of intelligent vectoring methods. One the other hand, Table 3 provides a comparison based on controller response while Table 4 compares their computational speeds and mechanical energy consumptions.
Comparison of intelligent torque vectoring methods.
Braking performance
This measures the longitudinal displacement during braking. Some strategies significantly reduce braking displacement, meaning they are more effective at stabilizing the vehicle under braking.
Lateral stability
Vehicle response to double lane change for various controllers.
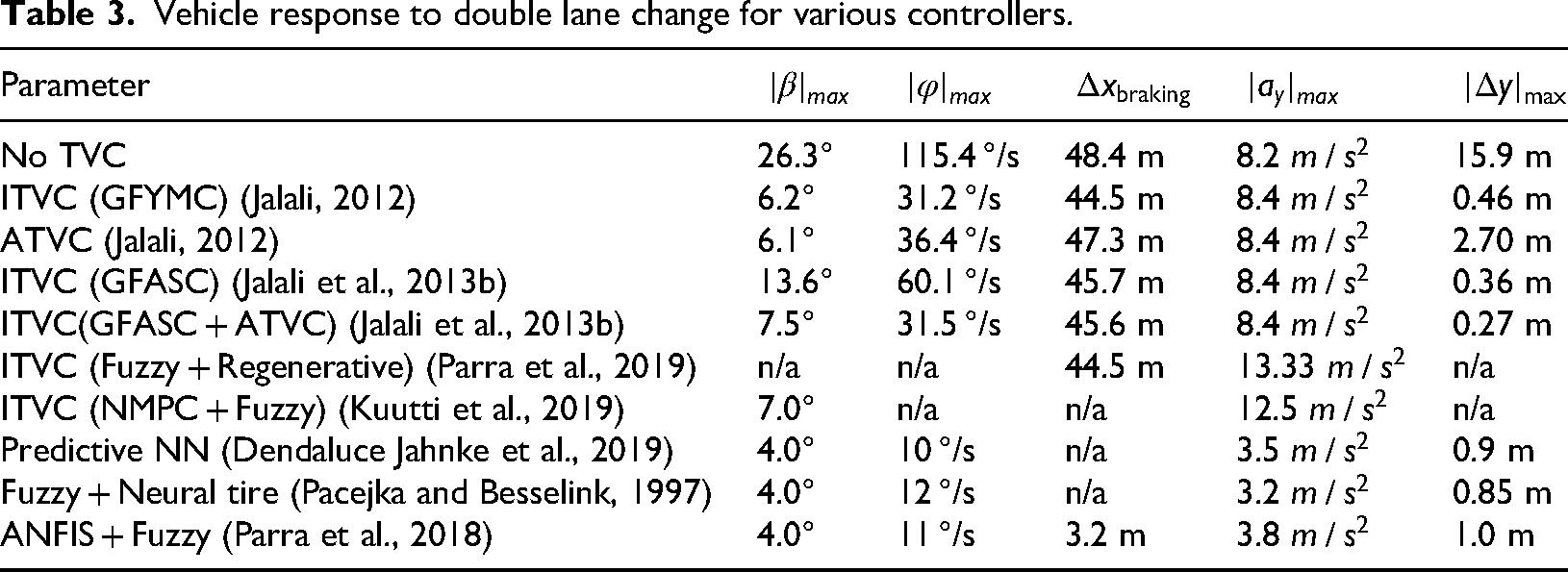
Vehicles with lower
Comparison of computational speed and mechanical energy consumption between different ITVC.
Timeline and summary of ITVC development
The historical timeline of ITVC development is shown in Figure 17. It spans a little less than three decades and it needed contributions from different researchers to be fully constructed. ITVC development is done in six distinct steps. To develop an intelligent TVC, the first step is to determine vehicle characteristics and set performance goals. This can be done by identifying whether the system is for EV, with independent per-wheel motors, all-wheel drive (AWD) systems or other configurations. The next step is to develop a Vehicle Dynamic Model. This requires the selection for the DOF of the vehicle and other characteristics such as weight. Once an appropriate dynamic model is present at hand, the next step is to select the controller. It is possible that an intelligent controller from any AI method be used to optimize the longitudinal or lateral torque distribution. It goes without saying that the operation of this controller must be optimized, which is the next step. Optimization of the controller is used to determine the most efficient and effective distribution of torque between the wheels of a vehicle to improve handling, stability, and energy efficiency. The optimization process ensures that the torque applied to each wheel maximizes vehicle performance under various driving conditions while adhering to constraints like safety and hardware limits. Once the above steps are undertaken, it is possible to simulate the model and study its performance. It is possible to simulate the vehicle using any software such as Dynacar, IPG carmaker (Grüne and Pannek, 2011), CarSimand Matlab (Houska et al., 2011). Once the simulation results are obtained and deemed to be satisfactory, the final step of ITVC Development process is testing and validation. This can be performed in real or simulated conditions (IPG Automotive, 2013). It is very important to use different drive test methods such as forward, reverse, lane change, ramp steer, step steer etc. as well as different drive cycles. The results are compared and contrasted with those of other methods for benchmarking.
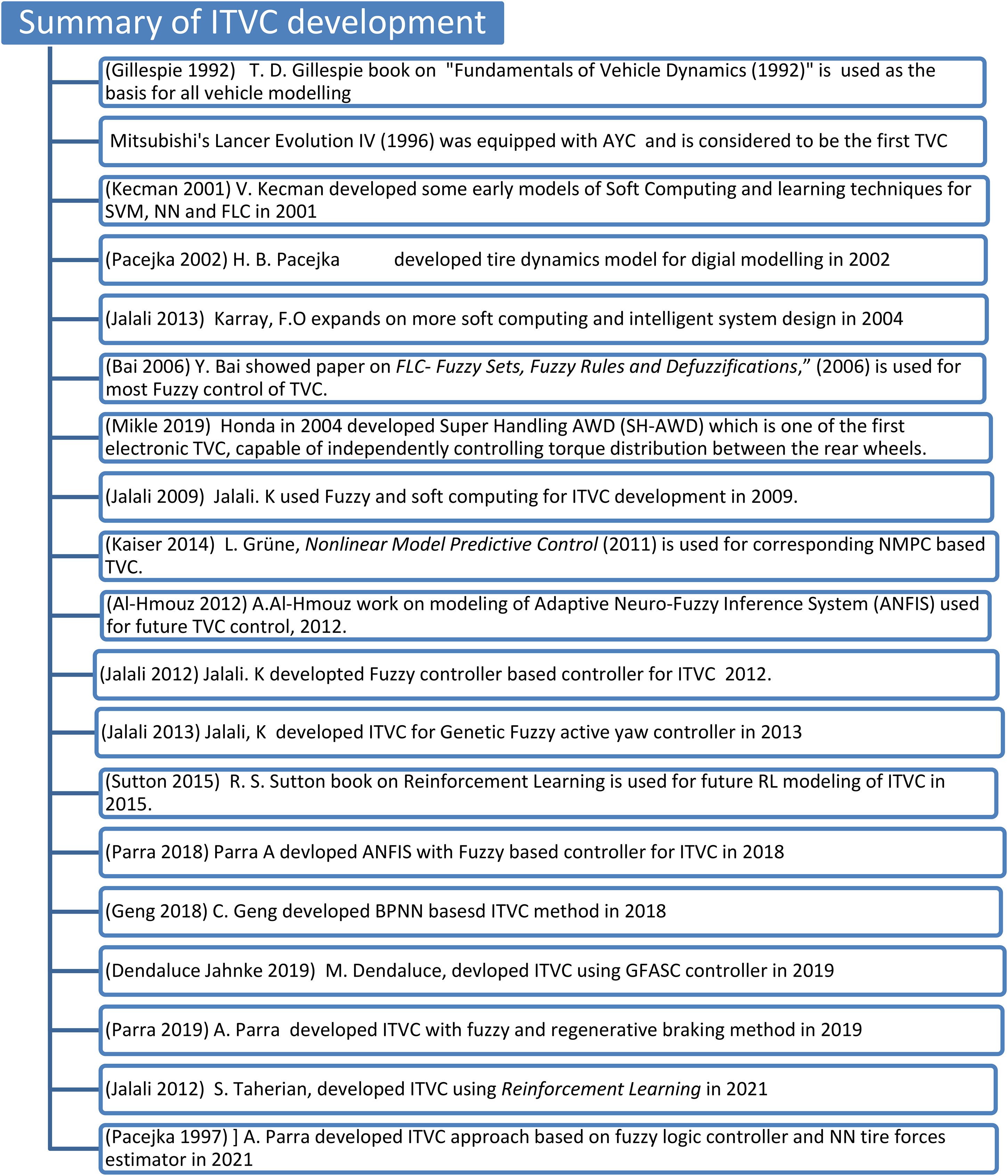
Historical timeline of ITVC development studies.
Result
As compared to traditional methods, ITVC handles the complexity of real-world scenarios, where non-linear, multi-dimensional dynamics can exceed the capacity of traditional control logic defined by the driver. It encompasses several advantages including ability for continuous and dynamic torque adjustments, which improves handling, stability. For the study performed for the controller above, it can be concluded that there are several advantages and disadvantages and utilities. NN and FLC are able to provide smoother control, even under complex, changing conditions, reducing sudden torque changes and improving ride comfort. RL and NMPC are optimized for energy use, enabling torque adjustments that save power in EV or reduce fuel consumption. It also offers adaptability and learning.
RL and NN learn from data and dynamically adjust to conditions without predefined rules while traditional methods are typically rule-based. NMPC and DDPG optimize for multiple objectives, such as energy efficiency and handling, allowing vehicles to maintain performance across a wider range of conditions.
While Traditional methods perform well in predictable environments it lacks adaptability and real-time optimization that ITVC offers in scenarios where the driving environment is dynamic, such as autonomous driving, sports cars, or high-performance off-road vehicles. The integration of EVs with larger electric power system is underway (Honda R&D, 2005; Ikushima and Sawase, 1995) and there are novel approaches that propose using EV and V2G technologies in very different scenarios which range from stabilizing renewable energy intermittency (Aftab et al., 2018; Ustun et al., 2019), stabilizing voltage (Farooq et al., 2022; Safiullah et al., 2022), providing virtual inertia in weak power systems (Mishra et al., 2024) to supplying energy lifeline in emergencies (Hussain et al., 2020). All of these developments, when considered as part of a larger picture, show that EVs will become more important in the energy domain in the near future and ITVC will play a crucial role in this transition.
Conclusion
Using ITVC promotes enhanced vehicle stability and handling higher efficiency and adaptability to complex and dynamic environment, in all of the above stated methods, the computational ability, predictive and anticipatory capability of AI methods allows ITVC to have superior advantages over traditional methods. The main downside of these methods is the computational cost, training and tuning of the parameters which can get very costly and requiring sensitive and precise data which can also be prone to a new subset of problems like cyber-attacks, etc. Other than that it offers superior performance in most parameters. As the automotive industry advances toward autonomous EV, the future scope of ITVC is expansive encompassing AI integration, advanced machine learning, V2 V communication, and personalized driving experiences. It will become an essential technology for the next generation of smart, autonomous, and efficient EV.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.