
Abstract
Solar energy from the sun is the largest available renewable energy that enhances the endurance of a solar powered unmanned aerial vehicle. However, harnessing this solar power is a great challenge. This is due to having solar module system’s power output efficiency of only about 15–30%. However, a solar powered unmanned aerial vehicle has the potential to outperform a battery only operated unmanned aerial vehicle, especially when task being a pseudo satellite which requires long operating hours. The atmospheric conditions and geological locations undoubtedly the main cause for poor performance of these solar modules. In spite of its prolific improvement in solar cell efficiency over the years, the overall solar module system barely converts half of sun’s power into electricity. Therefore, this situation makes the current system unattractive to be widely used for energy harvesting. Recent attention has been focused not only on type of solar cells but on its positioning system. However, there were lack of understanding and research on the solar irradiance intensity and daylight duration’s effect on the power output. Therefore, a comprehensive model was developed to study on how the sun movement affects the solar module system’s performance. This simulation model has identified the daylight duration is more important in comparison to the available solar irradiance. Moreover, the higher the solar irradiance and daylight duration, the solar module system gives the most power output. The daylight duration also depends on the latitude where the higher the latitude gets, the longer the daylight duration. Besides, the longitudinal coordinates and elevation have minor effect on the daylight duration estimation. In other words, in summer, the northern hemisphere has more advantage compared to the southern hemisphere locations and vice versa.
Introduction
The energy sector is still heavily dependent on non-renewable fuel such as fossil fuels and natural gas as a source of energy. Even though solar energy from the sun is the largest freely available renewable energy that will never run out, harnessing this solar power is a great challenge. Currently, a solar module system’s power output efficiency of only about 15–30% (Azman et al., 2011; Akorede, 2012; Mekhilef, 2012; Rajendran et al., 2014; Smith and Rajendran, 2014; Wilson and Mooney, 2013). Therefore, this situation makes the current system unattractive to be widely used for powering an unmanned aerial vehicle (UAV). However, a solar powered UAV has the potential to outperform task done by battery only operated UAV.
Undoubtedly, the main causes of poor performance in these solar modules are the lack of consideration of the atmospheric conditions and geological locations (Azman et al., 2011; Engel-Cox et al., 2012; Akorede, 2012; Gaafar, 2012; Masral et al. 2015; Mekhilef, 2012; Rajendran and Smith, 2015). Solar UAV designers rely on general solar irradiance data to design the UAV’s solar module system that averages the solar irradiance value of a particular city and the daylight duration for a particular month of a year (SoDa, 2014). Figure 1 shows a sample of solar irradiance data for the month of August at Cranfield, England.
Approximation of global solar irradiance for August.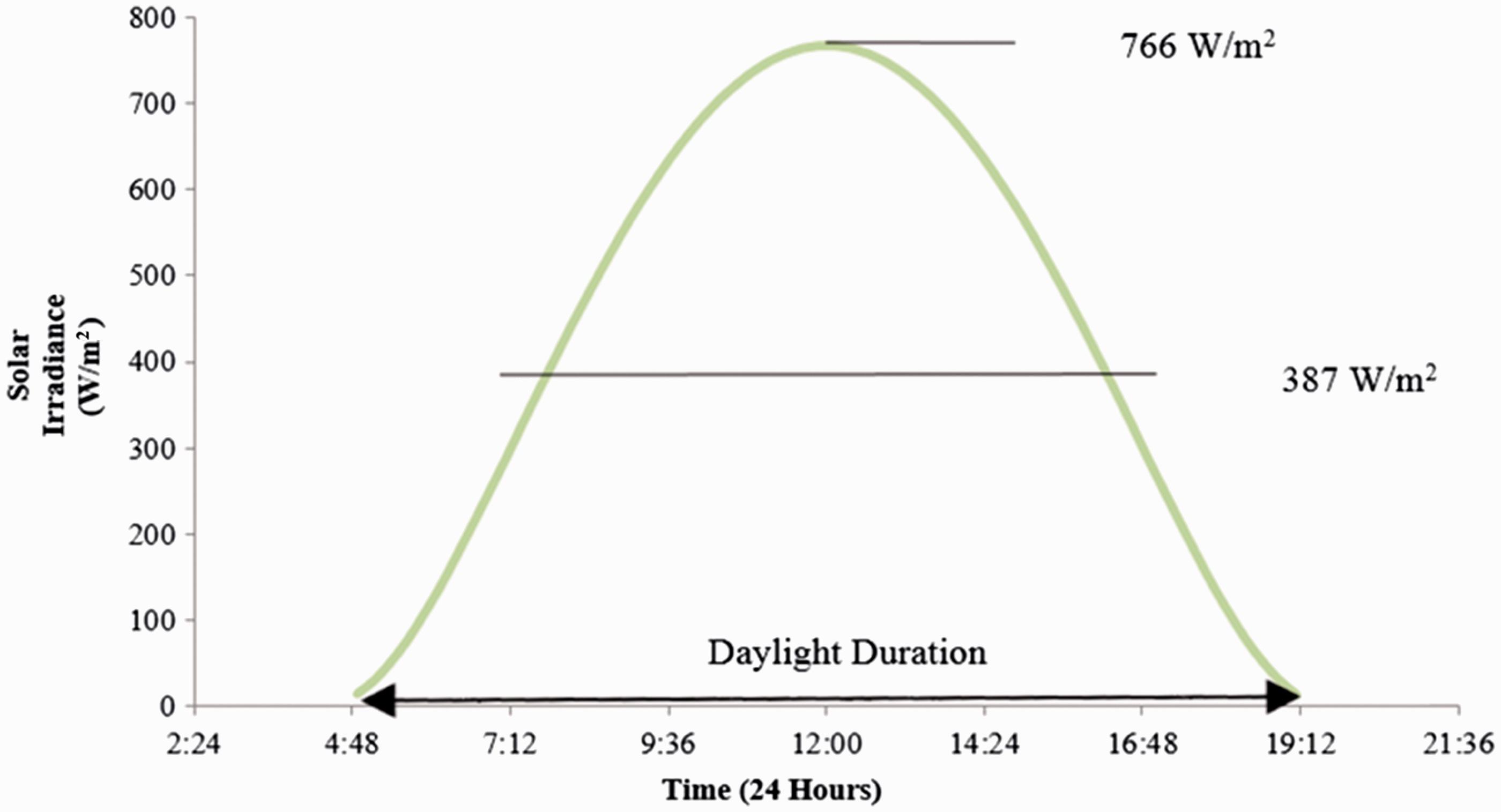
Conversely, operating UAV is a task that may be performed on wide range of flight radius, altitude, time and day(s) of a year. These parameters are essential in order to predict the amount of power generated from the solar module installed in an UAV. Thus, this solar irradiance and daylight duration modelling and simulation is novel modelling component that is crucial for design and development of solar UAV designs.
Modelling methodology
As a result, a comprehensive model was developed to study on how the sun movement affects the solar module system’s performance as shown in Figure 2. The parametric considerations done in this model includes the time and day of the year, the longitude and latitude coordinates of the flight location, and the orientation of the sun and solar cell. These parameter values are used in determining the sun’s altitude, declination and azimuth, the tilt angle of earth axis and tilt angle of solar cells. This modelling and simulation has enabled a precise solar irradiance and daylight duration prediction.
The framework of solar irradiance and daylight duration modelling.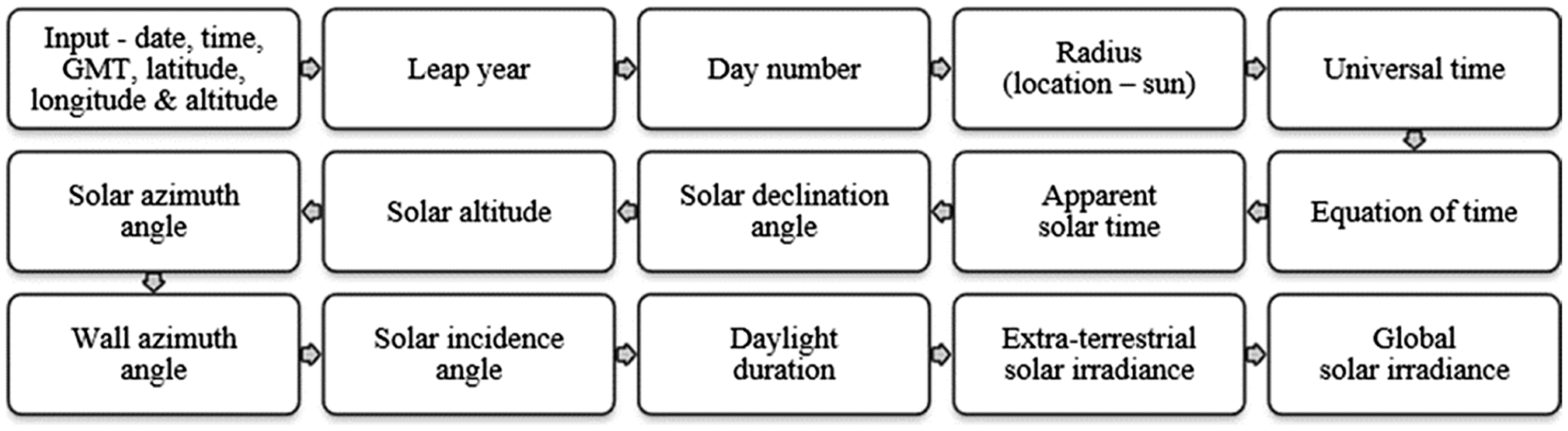
Thus, this sun movement modelling framework is an adaptation work done by Muneer et al. (2004), which begins by determining the input parameters (i.e. information regarding the date, time, green meridian time (GMT), latitude, longitude and altitude of the UAV operation). Then the modelling will begin by determining if the given date falls on a leap year (equation (1)). This ensures the following parameter, LeapConst (equations (2) or (3)), which is a constant value required to determine the general number of days elapsed in the given year, DayNo (equations (4) or (5)). However, this day number will be corrected based on the location and sun distance, radius (equation (6)) and the altitude of the location, AltGeo to determine a more precise day number, DN as shown in equation (7).







Once the date’s relevant parameters are defined, the solar time functions are determined. They are the local time (equation (8)), universal time (equation (9)), equation of time, EOT (equation (10)) and apparent solar time, AST (equation (11)). The equation of time and apparent solar time are the times used in all solar geometry calculations. These parameters apply the corrections due to the difference between the longitude of the given locality and the longitude, LONG of the standard time meridian. Muneer and Kambezidis (1997) has further details on solar parameters discussed in this section.




Apart from these parameters, the solar declination (equation (12)), solar altitude (equation (13)), solar azimuth (equation (14)) and solar incidence angle (equation (15)) must be determined. The solar declination, DEC is the angle between earth-sun vector and the equatorial plane. This parameter is considered to be positive when the earth-sun angle vector lies northwards of the equatorial plane as shown in Figure 3. The solar altitude, SOLALT and solar azimuth, SOLAZM are the relation between the sun’s positions in the sky and the normal sloped surface as shown in Figure 4.
Earth-sun vector – solar declination angle on June 22. Solar geometry of a sloped surface.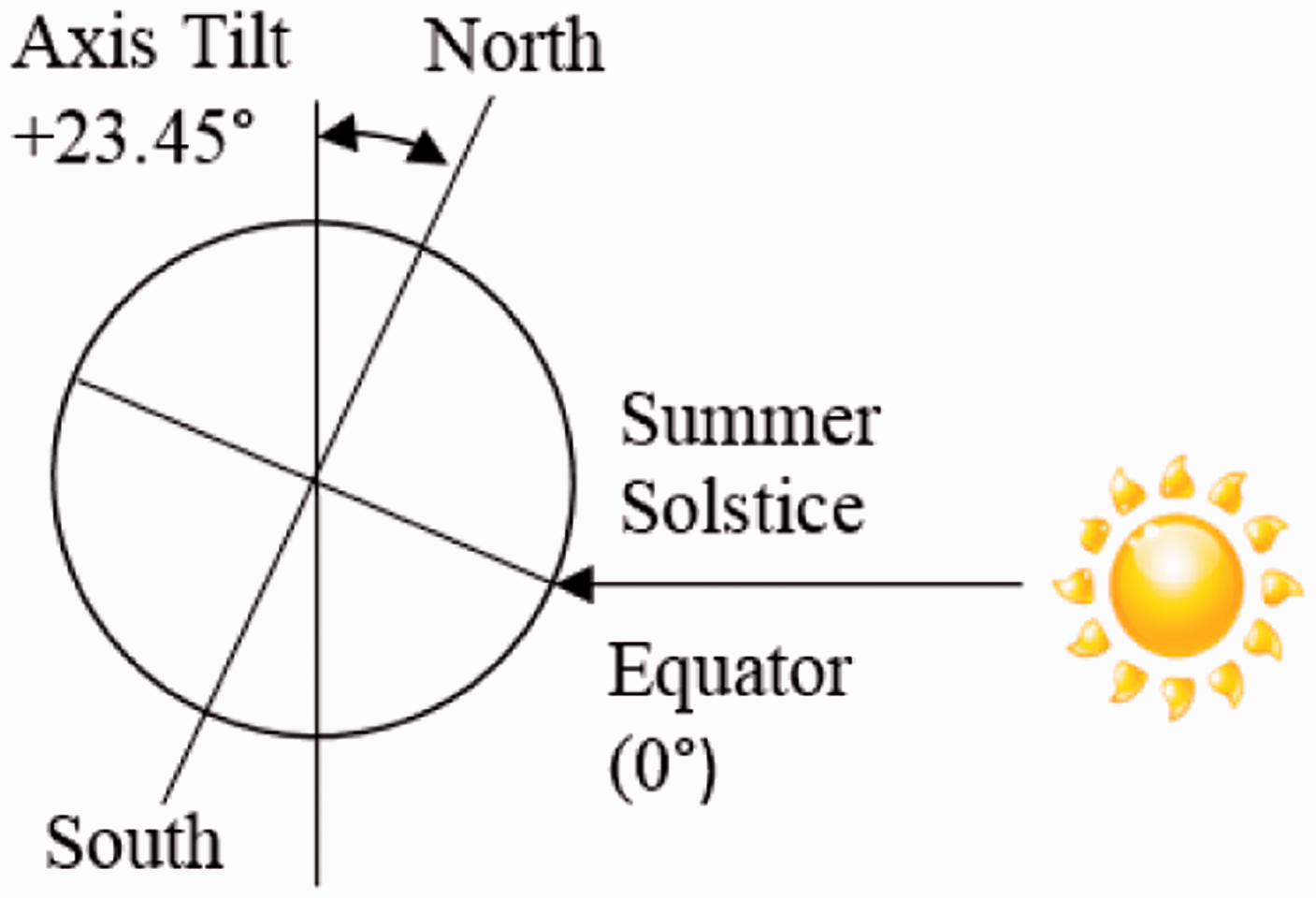
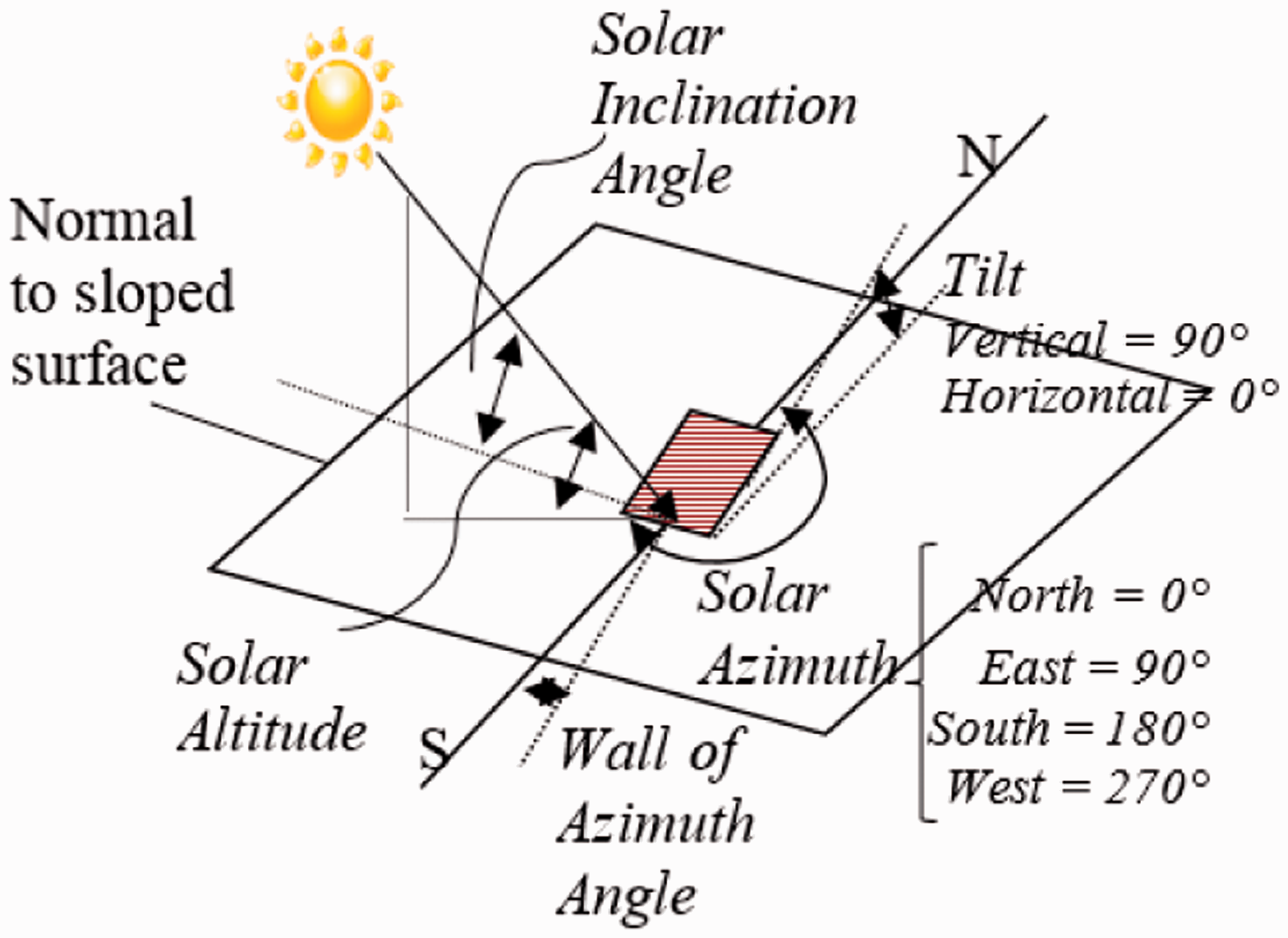
The solar altitude is the elevation angle above the horizon. Solar azimuth is the clockwise azimuth from the north of the sun’s beam projection on the horizontal plane, since sun’s projection is from east to west. These coordinates which describes the sun position are dependent on apparent solar time, latitude and longitude of the location and the solar declination angle. Then, the solar incidence angle, SOLINC gives the position which the sun’s beam strikes a sloped surface of any tilt angle, TILT that can be calculated from the solar altitude, solar azimuth and the orientation of the surface also known as the wall azimuth angle, WAZM.




The solar declination, solar altitude, solar azimuth and solar incidence angle parameters are then used to predict the best tilt and azimuth position for the solar module. These two parameters could be used to further precisely plan the path of flight in order to obtain the most solar power from the sun. Finally, the daylight duration and solar irradiance available for solar flight are predicted. The daylight duration or known as solar hour angle, SOLHRA is determined using equation (16), which then can be used to estimate the sunrise and sunset time.
The solar radiation that passes through the earth atmosphere is also known as extra-terrestrial solar irradiance (equation (17)). However, some are scattered out by clouds, water vapour, air molecules and aerosols. This diffuse solar irradiance needs to be taken into consideration to predict the actual solar irradiance obtained. Therefore, the global solar irradiance, has compensated this air mass coefficient, of 1.5 and diffused factor that is estimated to be 70% (Noth et al., 2008) of the extra-terrestrial solar irradiance by using equation (18).



Simulation results
In this section, solar simulation results for Cranfield, United Kingdom in year 2014 have been illustrated. There are four parameters that were studied here are the global solar irradiance, solar azimuth angle, solar incidence angle and the amount of daylight duration for various day in year 2014. The global solar irradiance and daylight duration for Cranfield is obtained on this some date over a year is depicted in Figures 5 and 6, respectively.
Global solar irradiance at various day number of the year versus time. Daylight duration versus various day number of the year.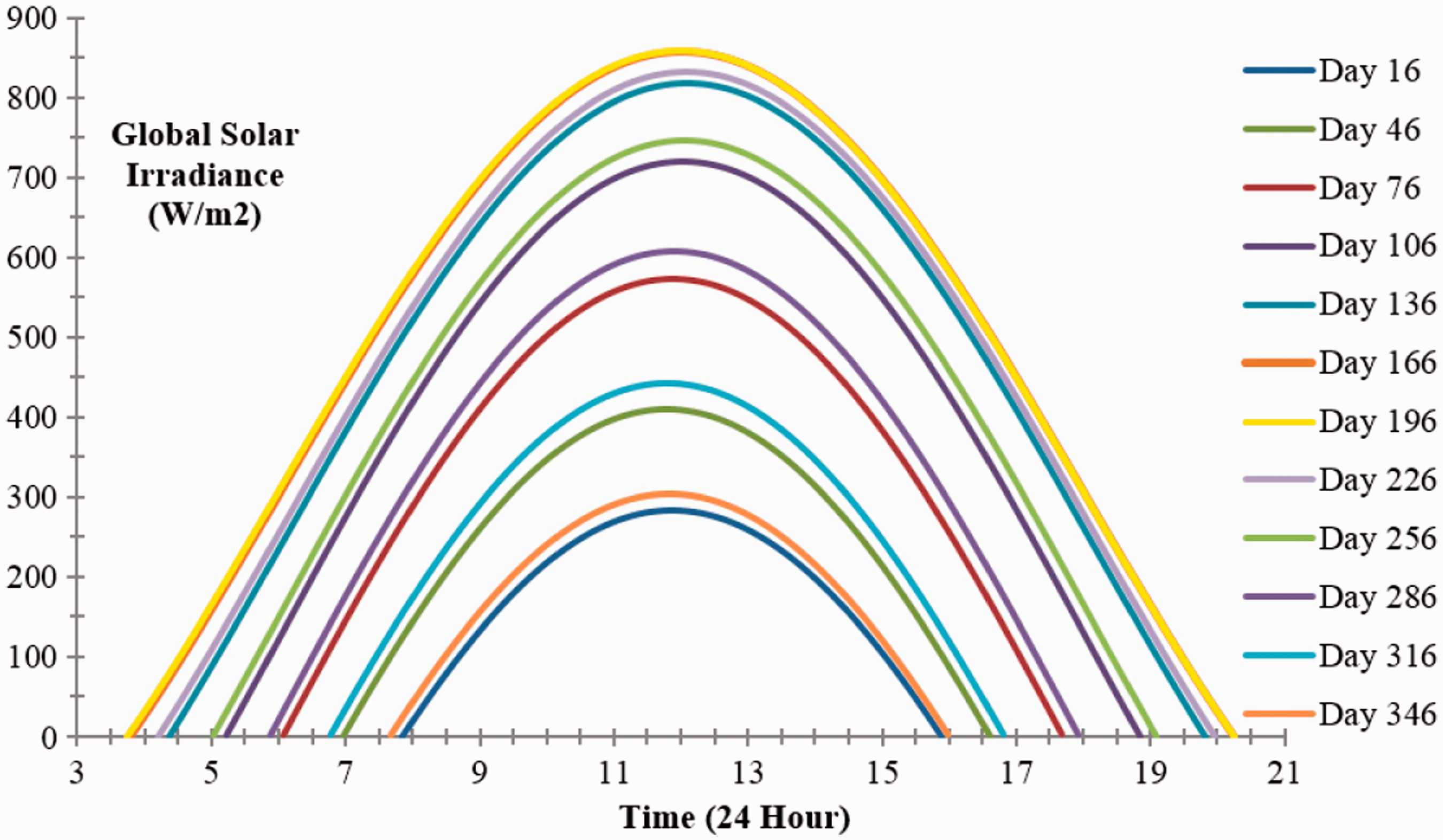
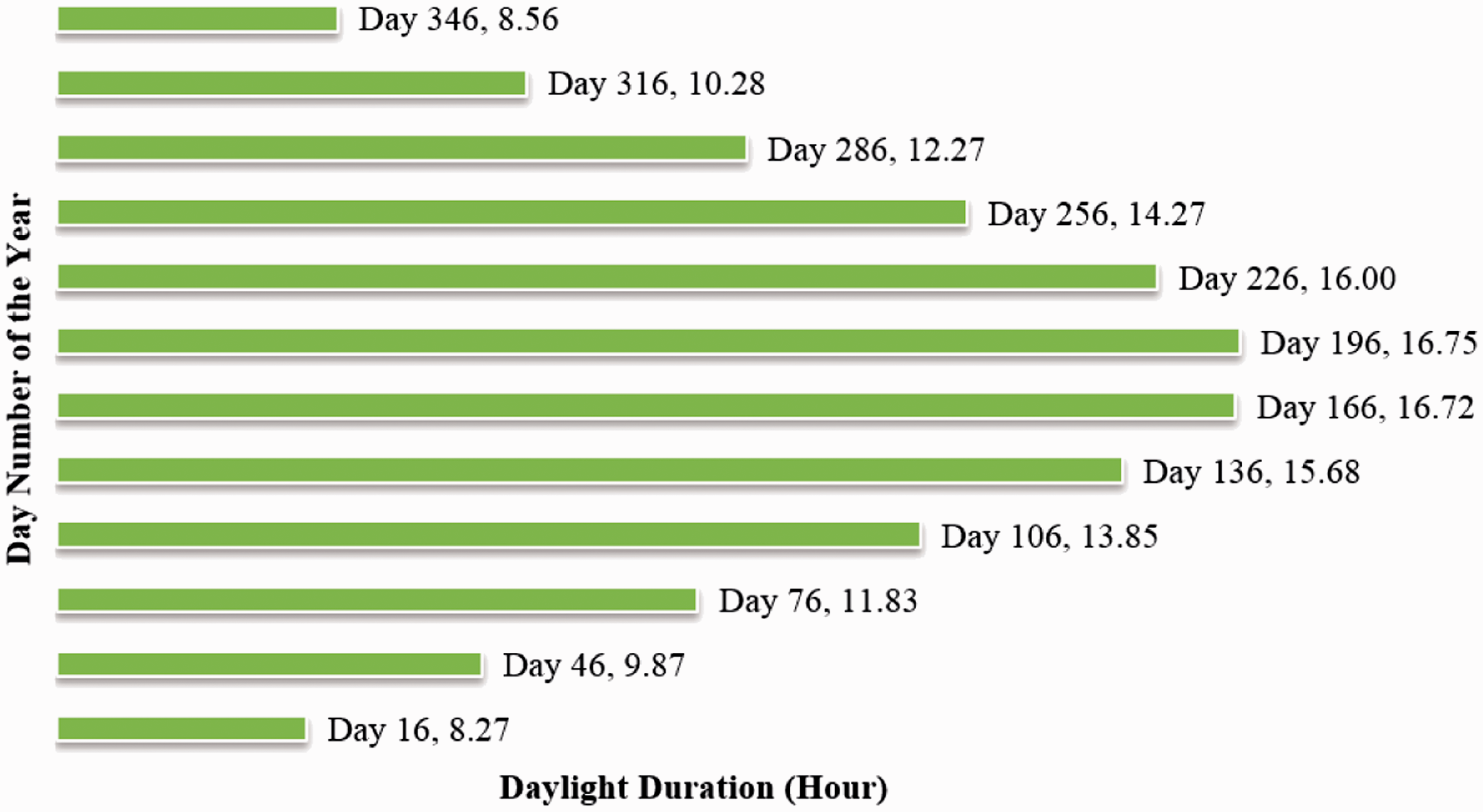
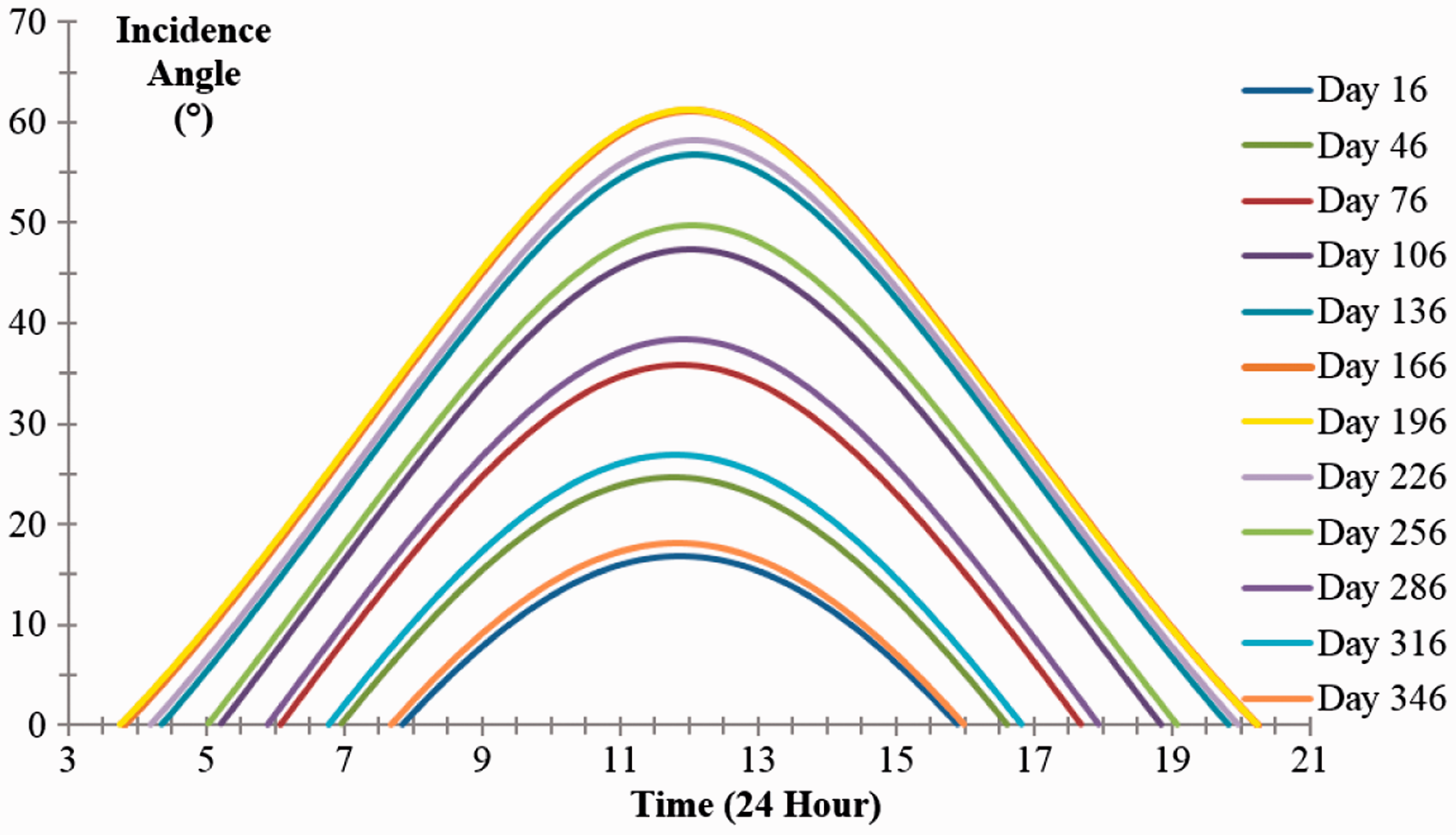
The maximum global solar irradiance occurred on the day that with the longest day length in that year. However, preliminary simulation has verified that the maximum global solar irradiance day does not always be the day with the longest day duration for most of the location around the world. The sun azimuth angle and solar incidence angle at various times of the day and day of the year for Cranfield is also given in Figures 7 and 8 in respective order.
Sun azimuth angle at various day number of the year versus time. Sun incidence angle at various day number of the year versus time.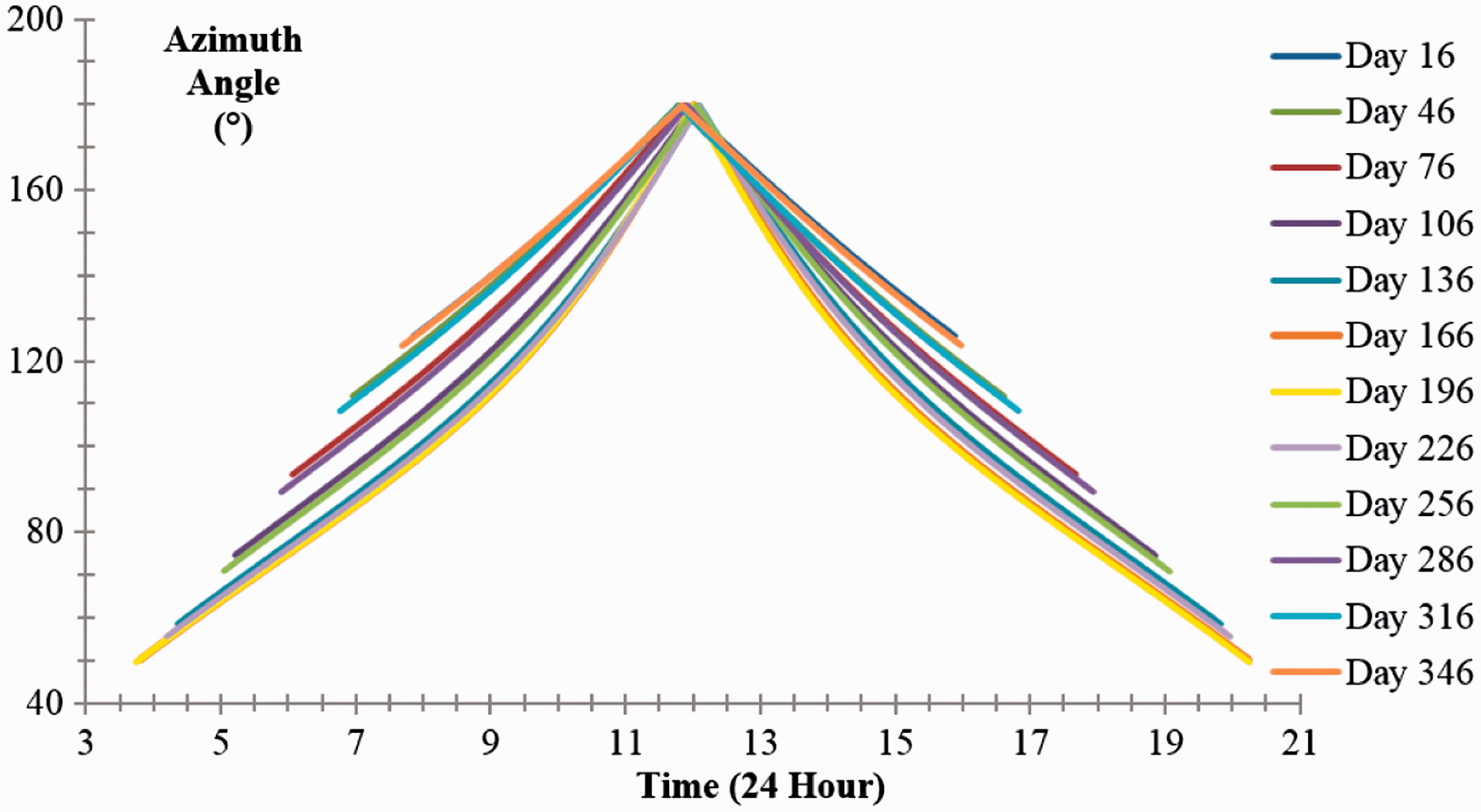
This sun azimuth angle illustrates that the height of the sun which peaks at mid solar noon hour that depends on the sun rise and sun set time in contrast to the 12 noon time which is the mid-day definition for a local time. From these solar data simulation, the solar azimuth angle is not always the widest on neither the longest daylight day nor on the highest solar irradiance angle on day.
The solar incidence angle is also another parameter crucial for solar UAV design as it will define the solar module’s tilt angle to obtain the most solar irradiance. Thus, both the solar azimuth angle and solar incidence angle is crucial in defining the UAV’s flight path in optimizing the solar power output. Similarly, all these solar data plots thus far only show that the most favourable values peaks around mid of summer and deteriorates to the worst around mid of winter for Cranfield. However, these situations certainly differ in other location.
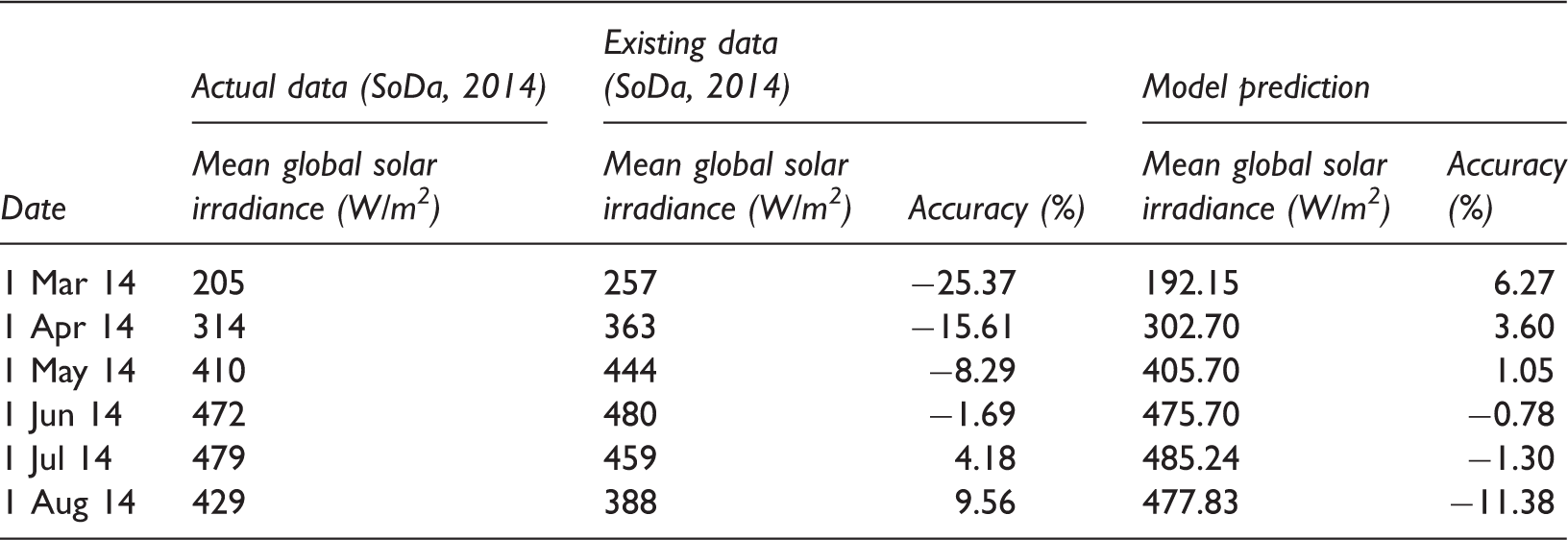
Developed model’s solar irradiance data accuracy comparison with the existing and actual data for 1st of each month during spring and summer 2014 (SoDa, 2014).
Conclusion
In summary, the developed model has enabled a more précised solar irradiance prediction. The daylight duration depends on the latitude where the higher the latitude gets the longer the daylight. Besides, the longitudinal coordinates and elevation have minor effect on the daylight duration estimation. In other words, in summer, the northern hemisphere has more advantage compared to the southern hemisphere locations and vice versa. Thus, the daylight length modelling and simulation determines its operational time suitability that ensures the flight endurance to sustain a powered flight. Moreover, the solar irradiance intensity is a major element that influences the production of power from a solar cell or module. Therefore, the solar incidence angle modelling and simulation ensures the UAV’s flight path is synchronized with sun movement to optimize the solar intensity power.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work is supported by Universiti Sains Malaysia grant (Ref 304/PAERO/60312047).