This paper studies the problem of resilient dynamic output-feedback control schemes for continuous-time networked control systems (NCSs). A decentralized hybrid strategy is utilized while network imperfections, external disturbances, and noise are considered. Moreover, during data transmission, a practical denial-of-service (DoS) jamming attack, which periodically disturbs the network channels, is considered. To preserve the network resources, a decentralized event-triggered mechanism is employed to transmit only the sampled signals that are required. It is assumed that outputs and control inputs of each subsystem are transmitted to the corresponding decentralized controllers and actuators, respectively, over the different individual channels based on independent triggering mechanisms. At first, the NCS is modeled as a decentralized hybrid system with exogenous disturbance and noise. Then, sufficient conditions that guarantee the -stability of the NCS in the presence of external disturbances and noise, which is resilient to periodic DoS attacks, are provided in terms of the linear matrix inequalities. Finally, sufficient conditions are derived to deal with the time-varying delays. It has been demonstrated that the proposed technique can be effectively applied to a well-known continuous stirred tank reactor (CSTR) as a benchmark example.
An increasing amount of attention has been paid to event-triggered control over the past few years (Amini et al., 2020; Ge et al., 2022; Mustafa et al., 2019). In contrast to the time-triggered control strategy, which samples the signals periodically, the event-triggered control strategy samples the signals only when certain conditions are met, thereby reducing traffic occupying network resources (Ju et al., 2021; Mi and Li, 2016; Sun et al., 2019). Despite the fact that event-triggered methods transmit less system information, the control performance may be impaired if the triggering mechanism is not properly designed. To cope with this problem, different event-triggering strategies have been studied, which makes it an appealing solution for the NCSs (Dong and Xu, 2020; Ge et al., 2022; Zhang et al., 2019).
In recent years, considerable attention is devoted to quantifying the effects of security threats on cyber–physical systems (Li et al., 2020; Liu et al., 2018, 2020; Shao and Ye, 2020). The problem of event-triggered control for cyber–physical systems is explored in Wang et al. (2021) where periodic DoS attacks are considered. The problem of dynamic event-triggered model-free for nonlinear cyber–physical systems is considered in Ma et al. (2022). In this paper, data transmission over the network is suffering from aperiodic DoS jamming attacks. In Sun et al. (2021), a memory-based event-triggered fuzzy controller is developed for the cloud-aided active suspension systems while a deception attack is considered. In Hossain and Peng (2021), the load frequency control problem for a multi-area power system in front of DoS attack by employing observer-based predictive event-triggered strategy is solved. In Manandhar et al. (2014), the problem of fault and false data injection attack detection in smart grids is investigated using the Kalman filter. The problem of attack allocation with resource constraints is studied in Guo et al. (2020) where the communication channels are jammed with false data injection attacks.
Moreover, in industrial control applications, sensors and actuators are often physically distributed over a wide range of areas, and therefore, centralized control is no longer applicable. In contrast to centralized controllers, which rely upon the total information available in the system, decentralized controllers focus solely on local signals, which can result in a significant reduction in network utilization. For example, Ahmad et al. (2021) introduced a decentralized dynamic event-triggered in combination of active suspension control for an in-wheel motor-driven electric vehicle equipped with a dynamic damper. Nevertheless, there are some security issues and some network imperfections that are not addressed in this work.
Recently, a few studies that consider security issues and decentralized control problems simultaneously are reported. For example, in Zhao et al. (2021), the problem of decentralized secure load frequency control for multi-area cyber–physical power systems is investigated. There is an assumption that as part of a network-based control system, sampled measurements are transmitted through communication networks and may be exposed to energy-limited DoS jamming attacks if they are clustered in a certain area of the network. In Bansal and Mukhija (2020), a sampled-data controller is designed for distributed NCS using a hybrid triggering method while the effect of cyber-attacks is considered. A decentralized hybrid strategy is employed to save energy consumption and save network resources. In Zhao et al. (2020), a decentralized event-triggered controller is developed for switched systems that is resilient to stochastic cyber-attacks.
One of the disadvantages of the above-mentioned works is that the network shortcomings such as time-varying delays are not considered. In practical applications, communication over a network is usually based on time-varying network-induced delays. Therefore, network imperfections should be considered during the design procedure. In Sun et al. (2020), a decentralized event-triggered control problem is investigated for a class of uncertain systems subject to network-induced delay and deception attacks. However, in these works, the design procedure is constructed based on the assumption that all of the states are measurable while this condition is hardly accessible in practical control systems (Bahreini et al., 2021).
Besides, although the presence of disturbances is inevitable in industrial applications, a few event-triggered control strategies are available in the literature (Borgers and Heemels, 2014; De Persis and Tesi, 2015). It is worth mentioning that in these works, the cyber-security issues are neglected and still remain an open problem.
Based on the above observations, the decentralized dynamic output-feedback control not only guarantees the stability of the NCS and meets the resource-efficient requirements but also considers cyber-security issues and robustness to the network imperfections, and exogenous inputs still remain unexplored. How to well solve this problem such that the effects of DoS attacks, limited resources, exogenous inputs like disturbance and noise, network imperfection like time-varying delays, and unavailable full-state information be simultaneously handled in a unified manner motivates this work. To the best of our knowledge, no results are available for this problem.
Besides, a major challenge of event-triggered control approaches is to design the event-triggering mechanism so that -stability of the NCS and Zeno-free behavior is guaranteed at the same time. This challenge is more difficult for decentralized output-feedback control especially in the presence of DoS attack where exogenous inputs are considered (Borgers and Heemels, 2014; Donkers and Heemels, 2012). Zeno-free behavior is hardly accessible even in disturbance-free scenarios when decentralized output-feedback schemes are considered (Borgers and Heemels, 2014; Donkers and Heemels, 2012). To tackle this issue, time regularization schemes (Abdelrahim et al., 2015; Forni et al., 2014) or periodic event-triggered schemes (Forni et al., 2014; Hu and Yue, 2013; Peng and Yang, 2013) are employed where the triggering condition is only checked after a specific time interval. It is worth mentioning that only a few of these works considered -stability (for ) analyses for decentralized output-feedback control strategies such as Forni et al. (2014), Hu and Yue (2013), and Peng and Yang (2013). However, these works use periodic event-triggered control schemes while cyber-security issues are neglected. Moreover, the presence of exogenous inputs such as noise and plant disturbances are inevitable in practical NCSs; however, a few available event-triggered control schemes considered these issues (Borgers and Heemels, 2014; De Persis and Tesi, 2015; Donkers and Heemels, 2012; Lehmann and Lunze, 2011). To the best of our knowledge, there has been little research that considers both plant disturbances and measurement noise simultaneously (Borgers and Heemels, 2014; Lehmann and Lunze, 2011). However, the proposed method in Borgers and Heemels (2014) and Lehmann and Lunze (2011) assume that only the outputs of the system but not their control laws are transmitted over the network. In addition, in these studies, the static controllers are considered, and the security issues are neglected. To overcome these issues, in the current work, a set of robust decentralized event-triggered controllers are first designed for all subsystems such that the -stability of the overall NCS is ensured. Then, by integrating results from time-triggered methods, periodic DoS attacks are included. Finally, the data transmission over the network is supposed to be affected by time-varying network-induced delays, and it has been demonstrated that it can be integrated with a strategy that manipulates the triggering criteria. Accordingly, the main contributions of this study are summarized as follows:
Compared to Forni et al. (2014), Hu and Yue (2013), and Peng and Yang (2013), in the current work, a novel resilient decentralized event-triggering mechanism that depends only on locally available information is designed for the decentralized output-feedback NCSs which ensures that (1) Zeno-free behavior is guaranteed even in the presence of exogenous inputs and cyber-attack and (2) -stability of the NCS is guaranteed with respect to disturbance, and a certain performance output in the presence of cyber-attacks.
There has been a great deal of research on resilient event-triggered control; however, in most of the studies, only one channel is considered (Chen et al., 2022; Pan et al., 2022; Yang and Zhai, 2022; Yin et al., 2022; Zhang et al., 2022). Compared to these works, in this paper, asynchronous transmissions of the outputs data and control laws are performed using independent transmission channels where the results are new.
In comparison with Borgers and Heemels (2014) and Lehmann and Lunze (2011), in the present work, a novel event-triggered controller is proposed where different types of exogenous inputs such as plant disturbances and measurement noise are included simultaneously. In addition, network-induced delays and DoS attack is considered. In this way, the results are new.
A novel hybrid model for the decentralized non-secure NCSs is developed. Using this hybrid model, a novel decentralized dynamic output-feedback event-triggered controller is designed to guarantee the stability of the NCS. The proposed controller is robust against network delays and resilient to periodic DoS attacks.
Sufficient conditions to guarantee the -stability of the NCS in front of external disturbances and noise are derived in terms of linear matrix inequalities (LMIs).
The presented method is applied to a well-known CSTR benchmark example that is previously used in Bauer et al. (2013). It is illustrated that by considering DoS attacks and networked imperfections, the proposed method guarantees the stability of the overall NCS. Recently, we proposed a decentralized resilient observer-based output-feedback controller for the NCSs (Torabi et al., 2021). However, in that work, a time-triggered protocol that uses high resources from the network is employed. In the current work, a hybrid structure is developed to model NCSs, and an event-triggered mechanism is utilized to effectively save the network resources. Furthermore, exogenous inputs such as disturbance and noise are included. Compared to previous work, this paper deals with the scenario where both the output measurement and the control input of each subsystem are sampled and transmitted over the network using two independent triggering conditions.
Notations
is represented a vector of the form , and is represented a diagonal matrix with the diagonal elements .
Problem formulation
System description
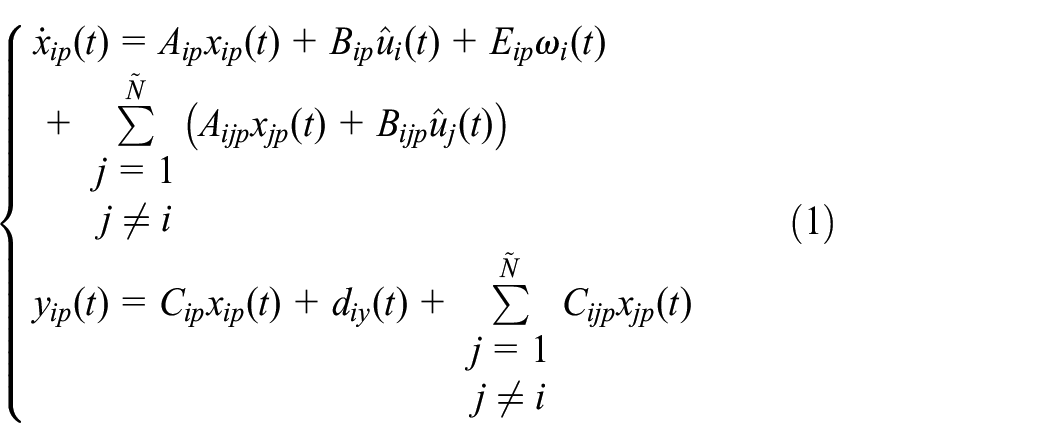
Consider the NCS model that is a set of coupled continuous-time linear subsystems. The ith subsystem is described as follows
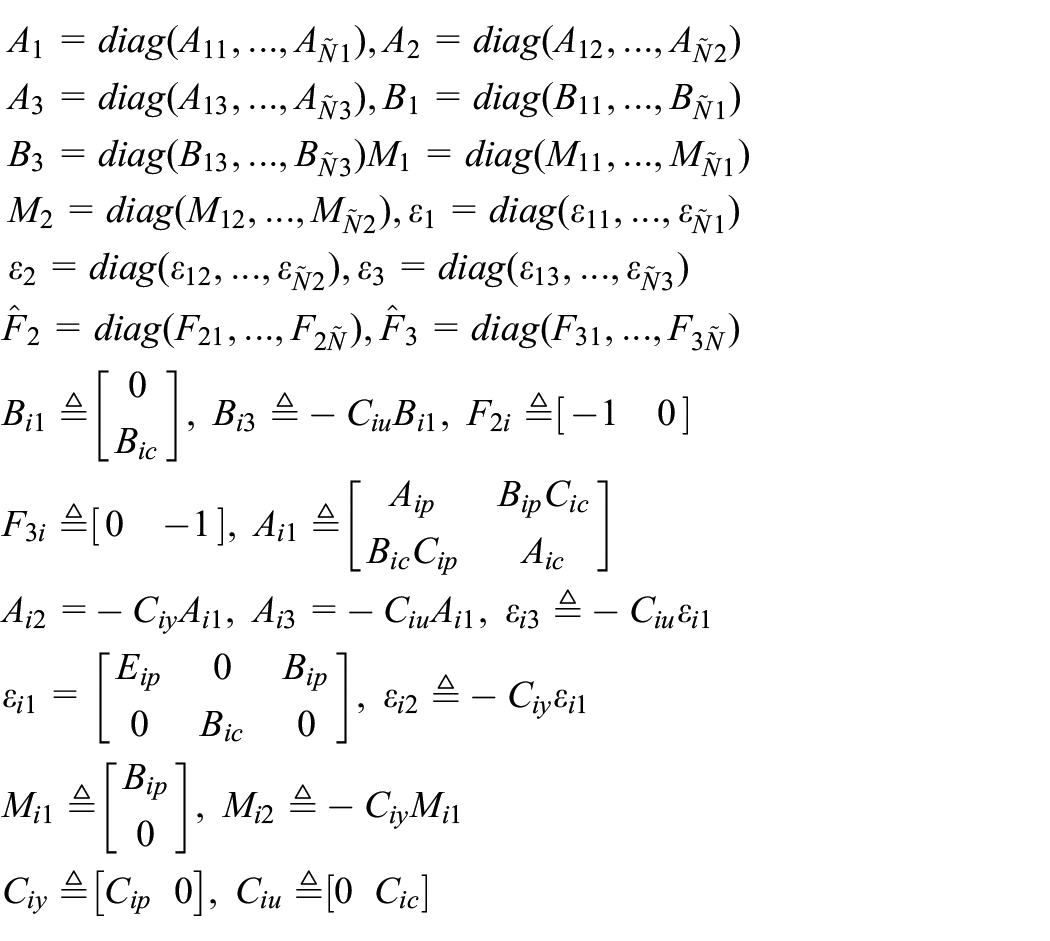
for , where , , and represent the state, control effort, and measured output of the ith subsystem, respectively. and are the exogenous disturbances and noise that affect ith subsystem in state and output channels, respectively. , , , and are the constant matrices with appropriate dimensions. In addition, the matrices , , and stand for the interaction which define the effects of subsystem on by states, inputs, and outputs, respectively. The entire NCS can be compactly written as
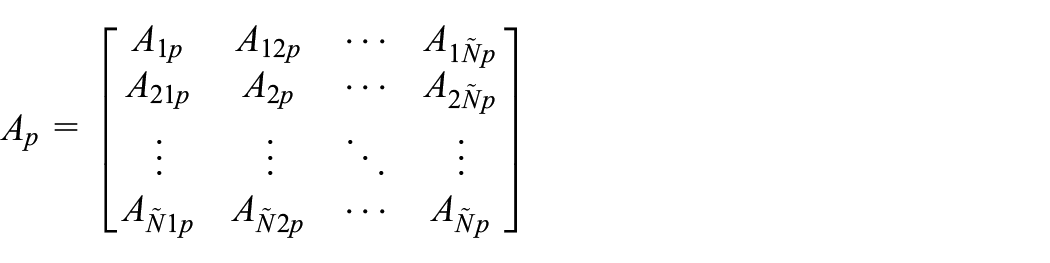
where , , , , and are the state, control input, measured output, plant disturbances, and measurement noises vectors of the NCS, respectively. In the current work, it is assumed that the state vector of the system is not fully measurable and the pair is controllable. It is worth to mention that system dynamics and measured signals by sensors are mainly affected by exogenous disturbances and noise, respectively. If these effects are not considered, the proposed controller will not be applicable in real-world applications. Therefore, in this paper, plant disturbances and measurement noise are included by and , respectively. The matrix is defined as
and the matrices , , and are defined in the similar way.
In this work, a decentralized structure is considered for the controller which means that for each subsystem of the plant, a resilient controller is designed such that among them information has not been exchanged. Therefore, the individual controllers do not have the information about coupling terms, which characterize interaction between subsystems. As the decentralized controller to be designed cannot use the external subsystem coupling terms imposed by others, these terms are neglected in the procedure of the controller design. Therefore, by omitting the coupling terms, the resulting ith subsystem of the plant can be considered as follows
It is assumed that and belong to the subspace, they are continuous, and also their time-derivative exists all the time. The proposed decentralized dynamic controllers can be given as
where is the state of the ith controller, is the networked version of the output corresponding to ith subsystem which is available at the controllers. , , and are the constant controller matrices with appropriate dimensions. is the control law for the ith subsystem, and stands for the noises which corrupt the ith control signal. It is assumed that the signal belongs to the subspace, it is absolutely continuous, and its time-derivative exists for all the time. Moreover, it is supposed that the dimension of each subplant state vector is as the same as the dimension of corresponding decentralized controller state, that is, . Similar to the NCS, the decentralized controllers can be reformulated in a compact form as
where , , , and are the states, output, input, and noise vectors of the decentralized controller, respectively. The matrices , , and are defined as , , and , respectively.
Network description
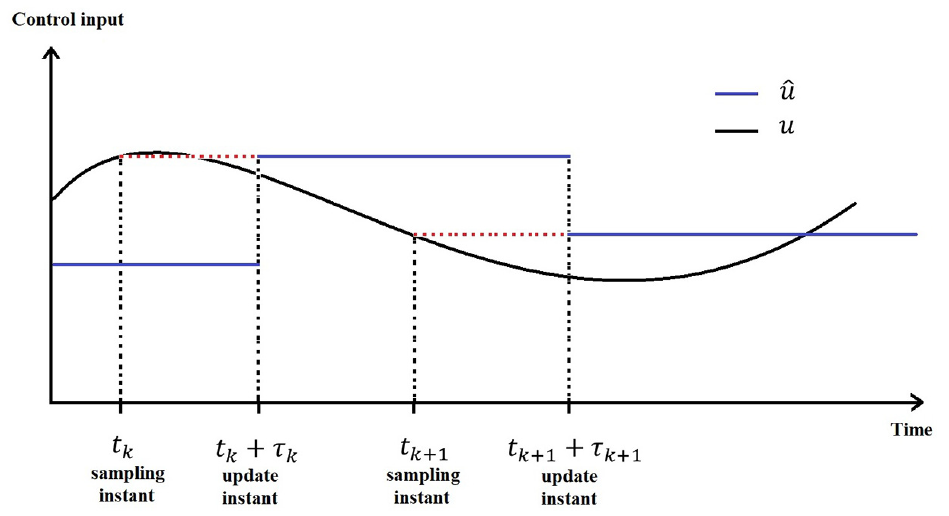
In this paper, it is assumed that the communication from sensors to the controllers and controllers to the actuators for each subsystem is implemented via two different triggering conditions over two independent digital channels. Therefore, the transmission instants are not necessarily synchronized. The subsystem outputs are sampled and transmitted to the decentralized controllers at transmission instants , which are determined by the corresponding triggering mechanism. Similarly, the control laws are transmitted to the actuators at transmission instants . and are the sampling instants sets which are defined the time instants at them and are sampled. In delay free case, the values of and will be updated just after the current values of and are transmitted to the controllers and actuators, respectively. Nevertheless, by considering time-varying delays, the update will be occurred after some delays which are contained in that is called update instant. More details are shown in Figure 1. Using zero-order hold elements, the values of delivered signals and are kept constant until the next data packet is received from the network. Just after the transmitted data are received from the network (at update instants), the values of and will be jumped to the actual values of and , respectively. For each subsystem, two network-induced errors and , for are defined to capture the error caused by the functioning of the network. In addition, for each subsystem, two timers and are introduced to determine the time elapsed from the last update instant of and , respectively. It is worth mentioning that the values of , , , and are jumped to zero at every update instant.
Functioning of network-induced delays on updating the control signals.
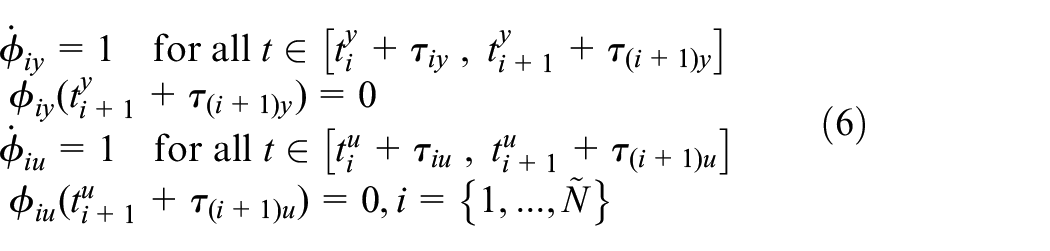
Based on the above reasoning, the timers and have the following dynamics
DoS periodic jamming attack
In this paper, a power-constraint periodic DoS jamming attack is considered, which blocks data transmission over the network periodically. The controller is supposed to be unaware of the jamming strategy and the jamming signal has a limited amount of energy. As a consequence, the attackers are only able to affect the network for a limited period of time. The jamming signal can be defined as follows
where is the number of attack periods, is the period of the jamming signal, and for is the sleeping time of jamming signal corresponding to period. It is assumed that the sleeping times are time-varying and unknown to the controller, and they are belonging to the set that is defined as follows
where is the lower bound of the slipping times. To provide a clear understanding, the time intervals for all are the periods over which the jammer is inactive, and therefore, data transmission is allowed, and over the time intervals for all , digital channels are jammed and communication is blocked.
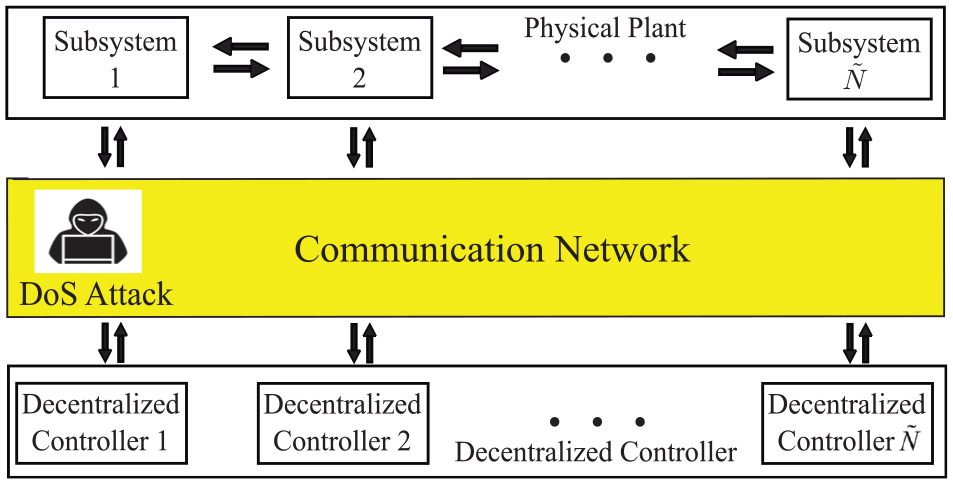
An illustration of the control system block diagram is shown in Figure 2. As shown in this figure, the subsystems receive information from their neighbors while the decentralized controllers only have access to local information. It is imperative to note that communication between the subsystems and the decentralized controller is carried out over a non-secure network that is vulnerable to cyber-attacks.
Block diagram of the control system.
Closed-loop model
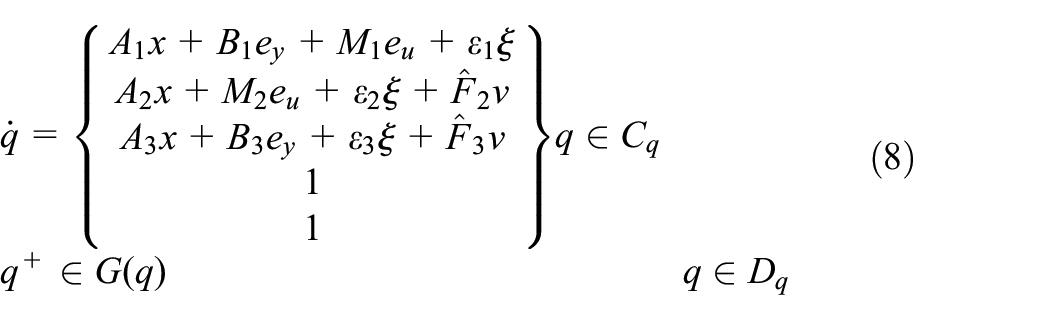
Using equations (3), (4), (6), and (7), the overall closed-loop NCS can be modeled as a hybrid system as follows
where
The vectors , , , , , and are defined as follows
where , denotes the hybrid state of the subsystems, , denotes the vector of the exogenous inputs, denotes the derivative of the exogenous inputs, and is the closed-loop state vector of the subsystems.
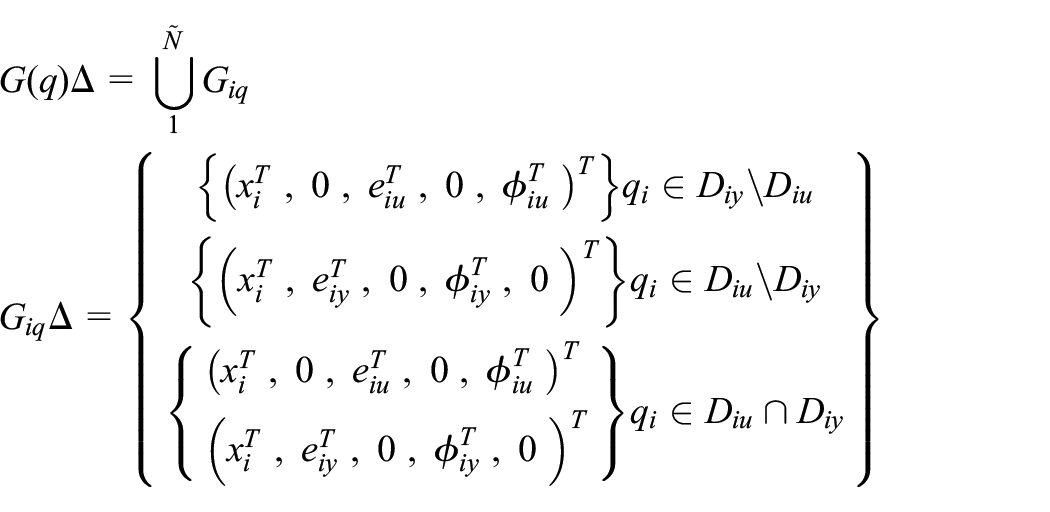
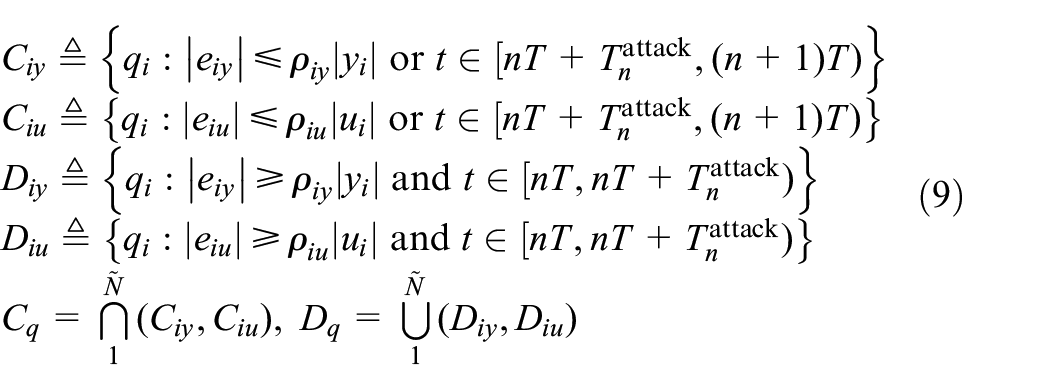
The sets , and , are specified based on the triggering mechanism for the outputs and control laws of the ith subsystem, respectively. To provide a clear understanding, the jump map consists of three cases; the first two ones capture the situations where just one of the triggering conditions (output or input) of the corresponding subsystem is satisfied, while the third one is related to the situation where both conditions are satisfied simultaneously. These flow and jump maps in equation (8) are given as follows
where and are the triggering parameters that they are designed in the sequel.
Remark 1. The periodic DoS attack is included by expanding the idea of transmission intervals in the context of time-triggered control. One of the main challenging issues is enlarging the transmission intervals, which subsequently leads to expanding the sleeping period in the periodic DoS attack (7) and that is still an open problem. To examine the control performance, the following controlled output is considered for each subsystem
where , , , and are the real constant matrices with appropriate dimensions. By defining the matrices and as follows
the controlled output for the entire NCS can be defined as
where .
The goal of this paper is to design both the controller matrices in equation (4) and the parameters of the hybrid flow and the jump sets in equation (9), such that the -stability of the hybrid system (8) from input to the controlled output with a pre-specified -gain will be guaranteed.
Controller synthesis
The goal of this section is to develop sufficient conditions to design a resilient decentralized dynamic output-feedback controller and event-triggering parameters simultaneously such that the stability of the overall NCS is guaranteed.
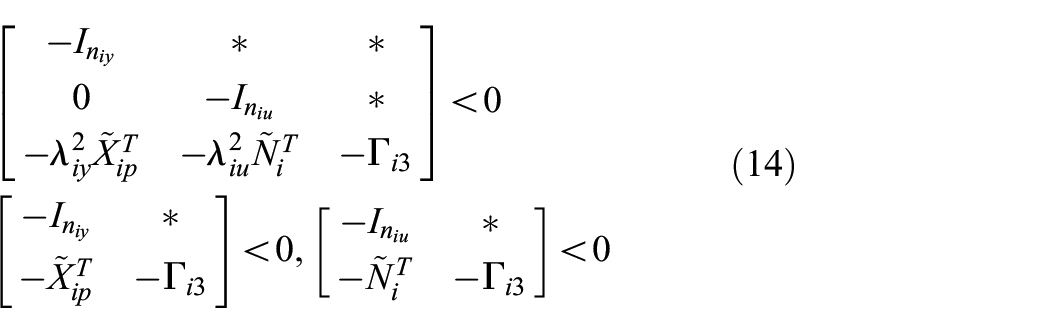
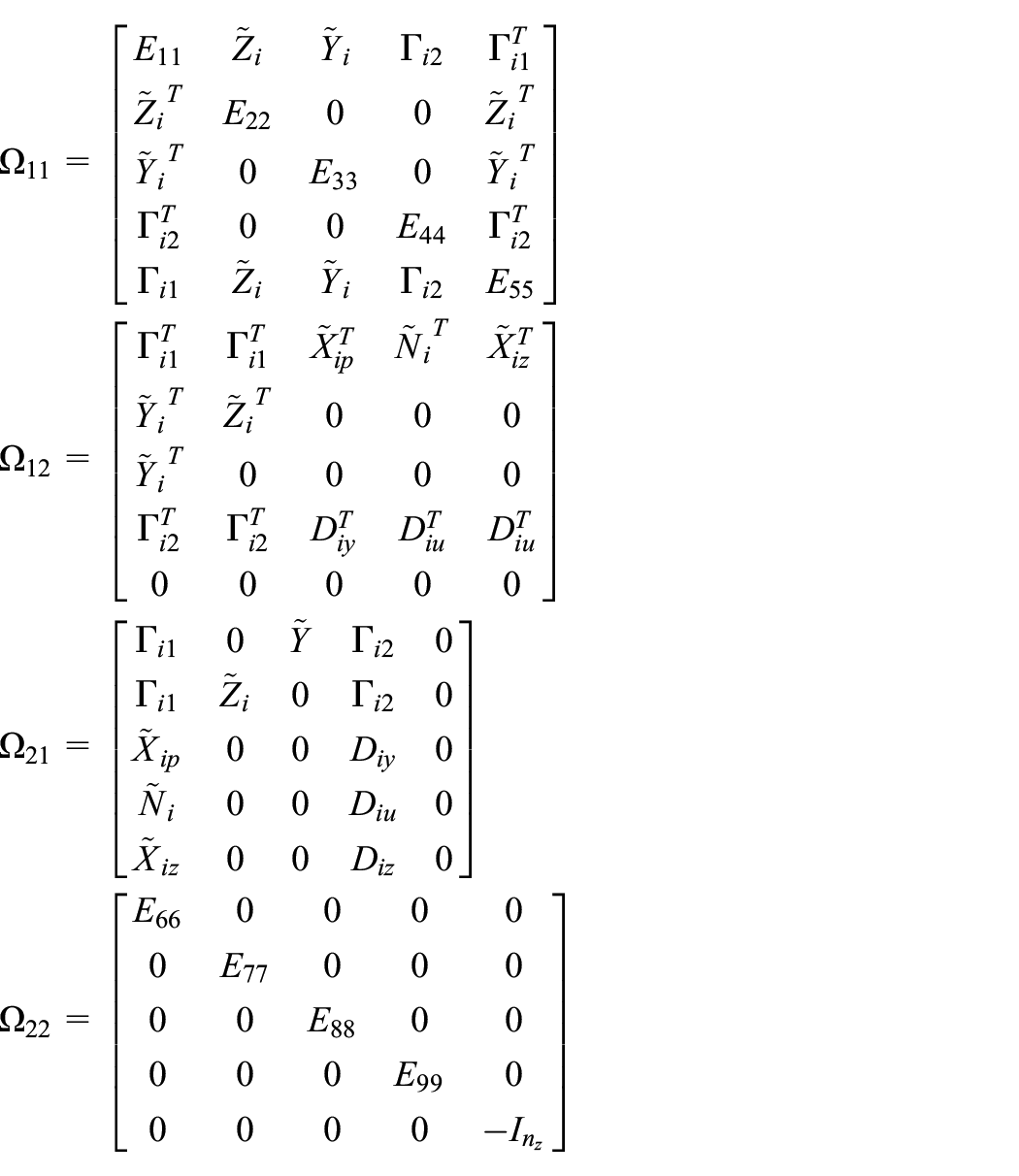
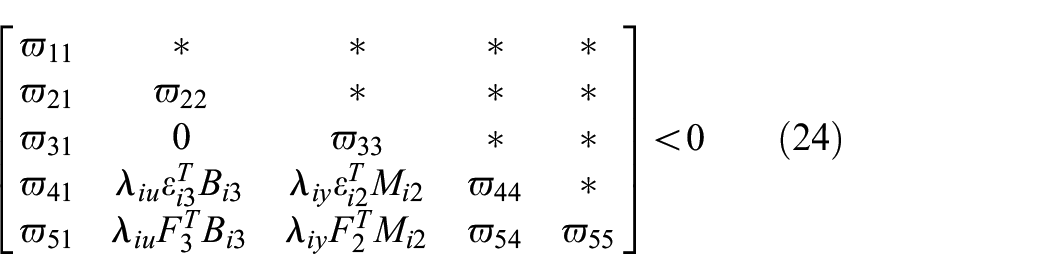
Theorem 1. Consider the hybrid system (8) with the flow and the jump sets given in equation (9), and the controlled output (12) that is suffering from the periodic DoS attack (7), where the constant parameters and are known. If for given real scalars , , there exist symmetric positive-definite real matrices , real matrices , , , and real scalars , such that the set of LMIs (13) and (14) is held
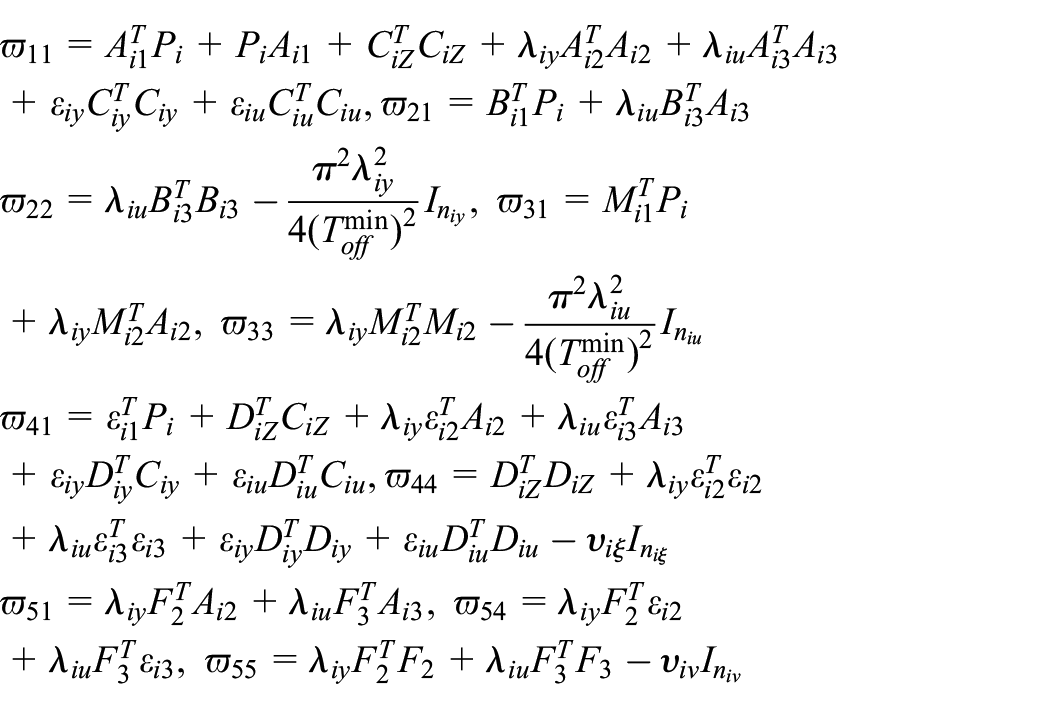
where
then, the parameters of the decentralized controller and event-triggering parameters can be computed as follows
Using these matrices, and in equation (5) are computed as follows
where and are the two arbitrary square and invertible matrices satisfying .
The -gain is obtained as follows
Proof. Let us define the following matrices for each subsystem
where are the symmetric positive-definite real matrices. Based on the definition of , we have
which results in
After some calculation steps and using equations (14), (15), and (19), the following equations are held
Applying the Schur complement lemma to equation (14), it can be shown that
where . Based on the definition of and hybrid system (8), the following equations can be derived
Now, using equation (22) and substituting equation (23) in LMI (21), then by employing the Schur complement lemma, it can be deduced that equation (21) leads to
where
Therefore, based on the Proposition 1 in Abdelrahim et al. (2018), it can be proved that the overall NCS is -stable, and it is guaranteed that the -gain is .
Theorem 2. Suppose that using Theorem 1, a dynamic decentralized controller in the form of equation (4) has been designed for the NCS (1) that is resilient to periodic DoS attack (7) and guarantees the -stability of the closed-loop system. Then, by considering the effects of transmission delays that upper bounded by , the new event-triggering conditions and ensure that the event-triggering conditions and are satisfied, respectively, for all , and for any , if the following inequalities are held
where is the solution of the following differential equation with the initial condition
Furthermore, the inter-execution times , for all , which are determined by the event-triggering conditions and are lower bounded by the time and , respectively, where and are determined as follows
Proof. The dynamic of the can be computed as
and the dynamic of can be computed similarly. Therefore, the evolution of the and is lower bounded by the solution of the following differential equation
Note that is the decentralized control law for each subsystem. Now, using this control law and following the similar arguments as shown in the proof of Theorem 3.1 in Tabuada (2007), for each subsystem, it can be proved that if is adopted as the upper bound for delay that affecting each channel, then the results of the Theorem 1 is still guaranteed. Therefore, by choosing the for as the upper bound of time-varying transmission delays in all channels, the proof will be completed.
Remark 2. In Theorem 1, it is evident that the proposed decentralized controller is designed based on finding the feasible solutions to the LMIs given in equations (13) and (14). The implementation of these conditions is greatly simplified by the use of the well-known numerical solvers such as Sedumi and SDPT3 in combination with the YALMIP, which is a user-friendly interface in MATLAB. It is worth to emphasis that these LMIs depend on the predefined parameter which is related to the jamming signal, and and which determine the conditions of the event-triggered protocol and -gain, respectively. Using well-developed interior-point algorithms to solve these LMIs, feasibility analysis becomes easier when and values are chosen smaller and and values are chosen larger. The solvers may find it difficult or even impossible to solve the problem, if incorrect values are chosen for these parameters.
Remark 3. One of the main challenging issues in the event-triggered control is the Zeno behavior, which causes an infinite number of transmissions in a finite time interval. In this paper, in Theorem 2, it is proved that the inter-execution times , for all , are lower bounded, and thus, the Zeno behavior is excluded.
Remark 4. Note that in equation (16), it can be seen that the event-triggering conditions for the outputs and decentralized control laws of each subsystem are and , respectively. Therefore, maximizing the parameters and for may result in increasing the elapsed time before event-triggering condition to be violated. Clearly, this may extend the inter-transmission times and cause a reduction in the utilization of network resources. The event-triggering parameters and will be increased by maximizing the LMI variables and , respectively. As a result, this goal can be satisfied by employing the following optimization problem
where and are the weighting factors for optimization problem.
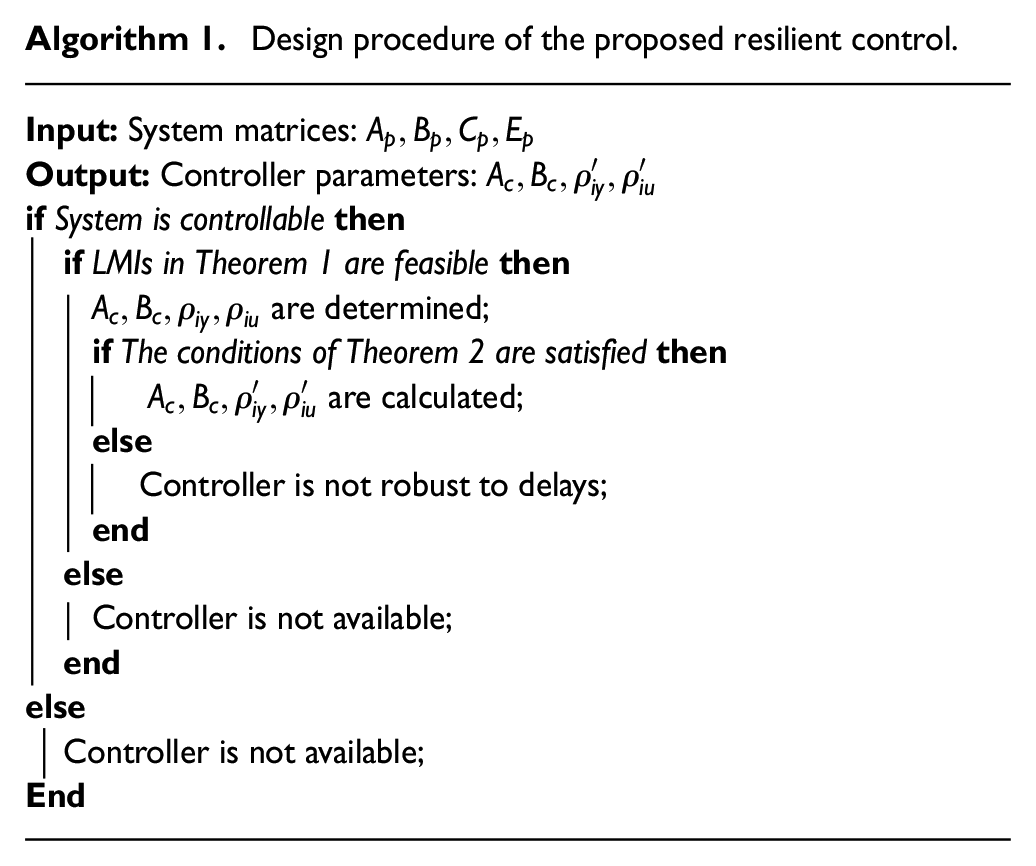
The design procedure of the proposed resilient controller is illustrated in Algorithm 1. As shown, the procedure begins with designing a decentralized controller based on Theorem 1, and then by manipulating the triggering parameters according to Theorem 2 robustness to time-varying delays is ensured.
Design procedure of the proposed resilient control.
Input: System matrices: Output: Controller parameters: ifSystem is controllablethen ifLMIs in Theorem 1 are feasiblethen are determined; ifThe conditions of Theorem 2 are satisfiedthen are calculated; else Controller is not robust to delays; end else Controller is not available; end else Controller is not available; End
Simulation results
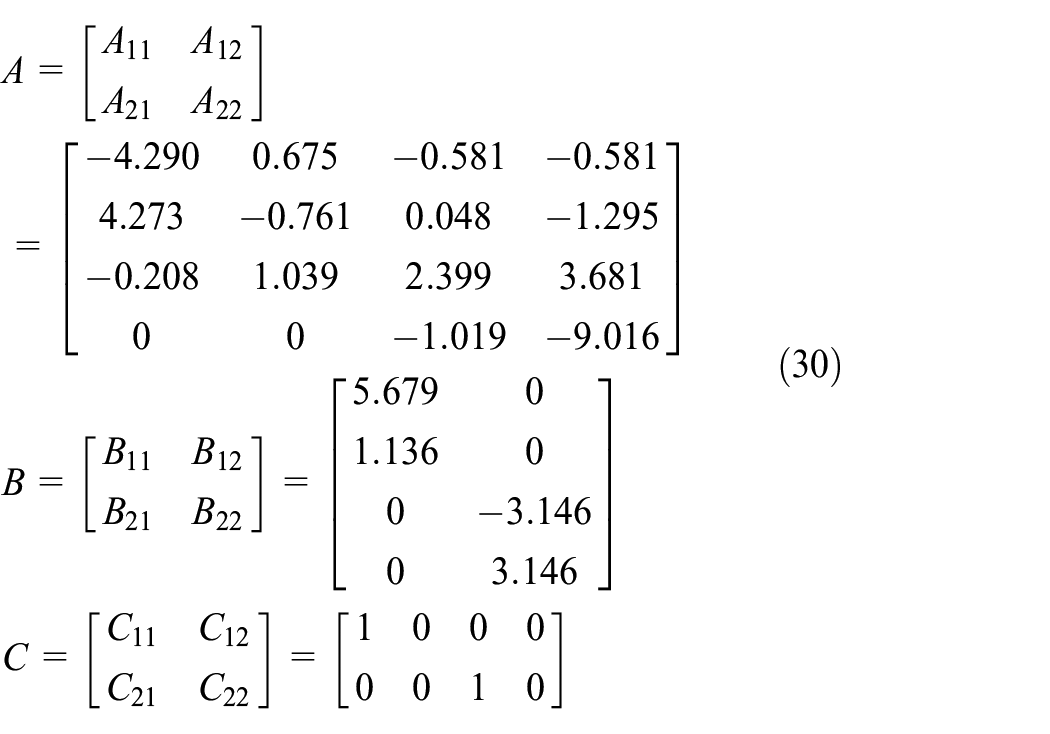
In this section, a well-known benchmark example in the NCS literature is adopted from Bauer et al. (2013) to illustrate the effectiveness and applicability of the proposed method. Let plant model (1) be a linearized model of an unstable batch reactor which consists of two subsystems. The system matrices are as follows
Previously, a decentralized output-feedback controller has been designed for this system where communication is implemented over a shared network which suffers from time-varying transmission intervals (Bauer et al., 2013). Despite the presented work, in Bauer et al. (2013), a periodic round-robin protocol has been used to orchestrate transmission on the network, and security issues were not considered.
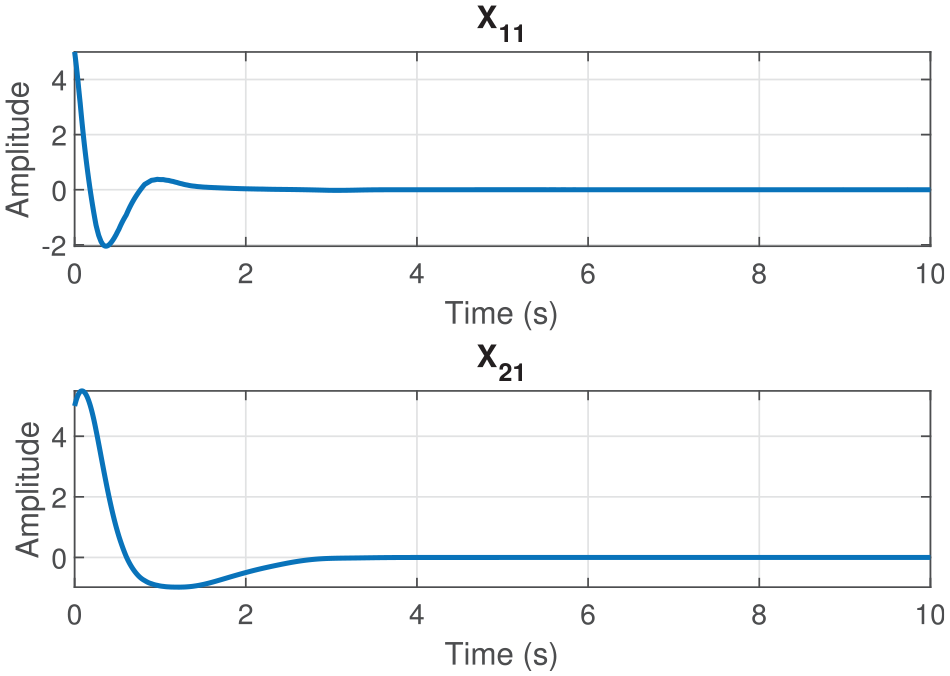
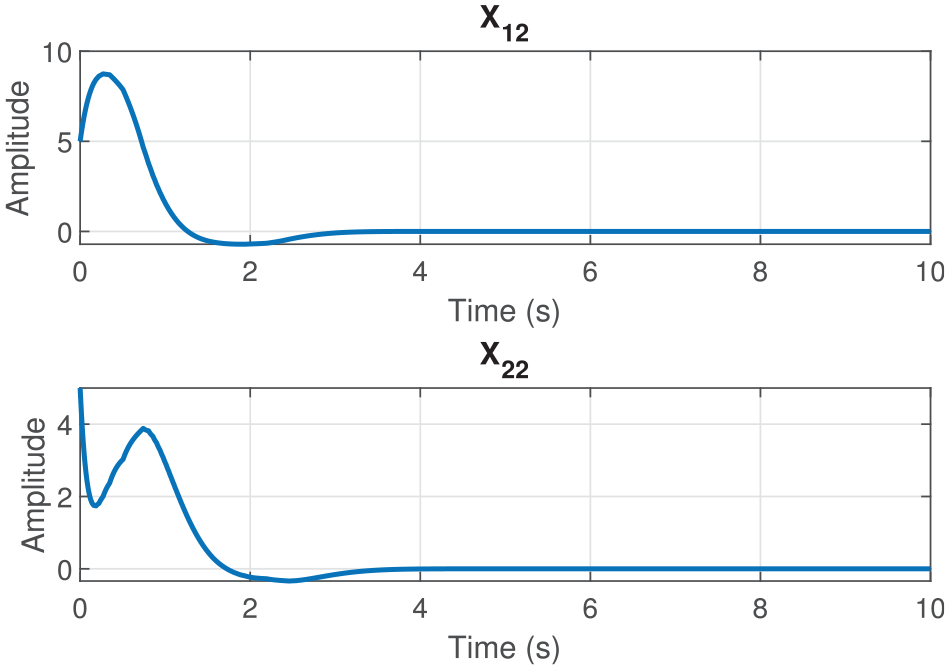
For the simulation purpose, the initial conditions of two subsystems are chosen as and , respectively. It is worth mentioning that for solving LMIs, YALMIP is used as an interface and MOSEK as a solver. At first, a decentralized model of the controller proposed in Abdelrahim et al. (2018) is considered. Different from Abdelrahim et al. (2018), we consider a scenario where the communication implemented over a non-secure network. To this end, a DoS jamming signal which is described in equation (7) with the parameters and is considered. The simulation results are illustrated in Figures 3–5. In Figure 5, the red curve is the control law that is determined by the controller and the blue one is the networked version of the control signal that is available in the actuator side.
States of first subsystem (non-resilient controller).
States of second subsystem (non-resilient controller).
Control inputs (non-resilient controller).
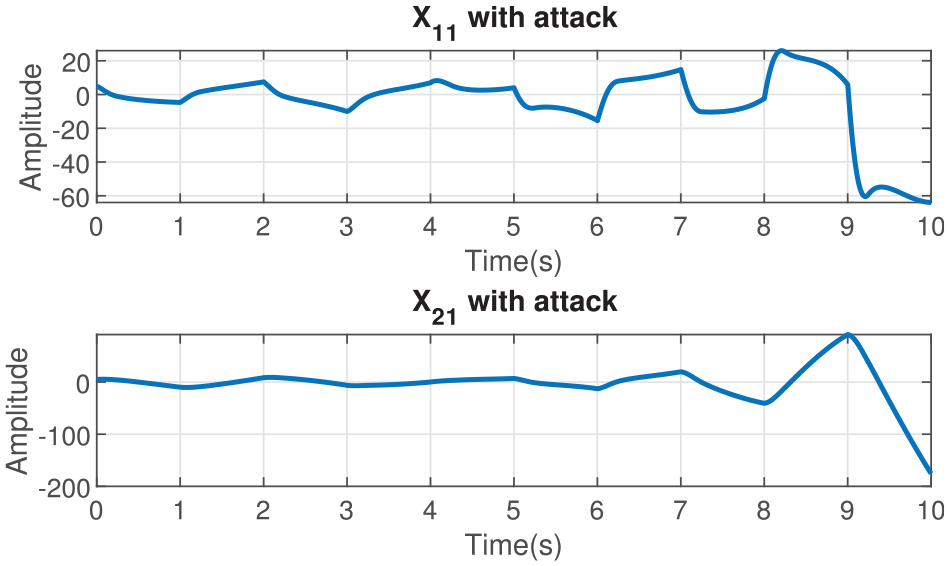
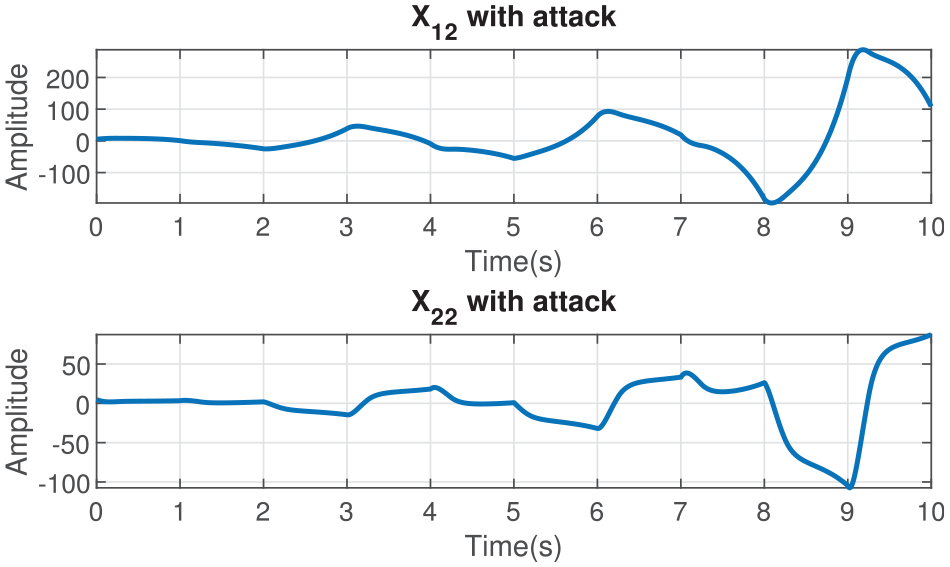
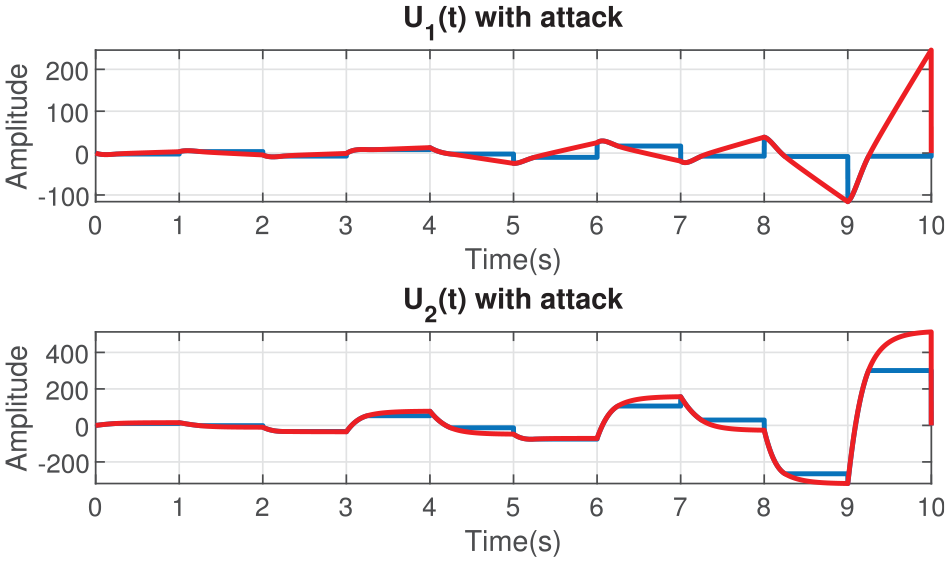
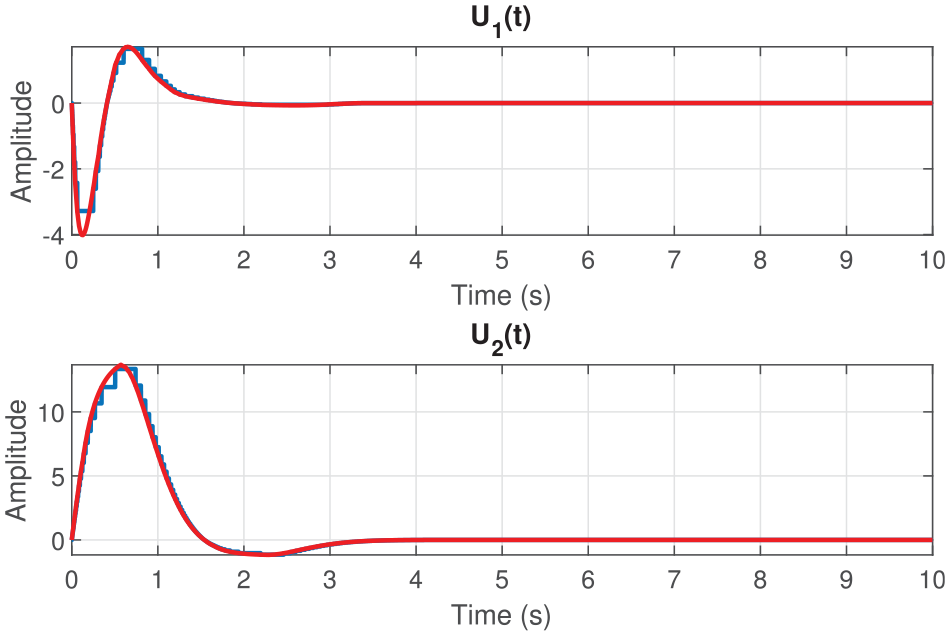
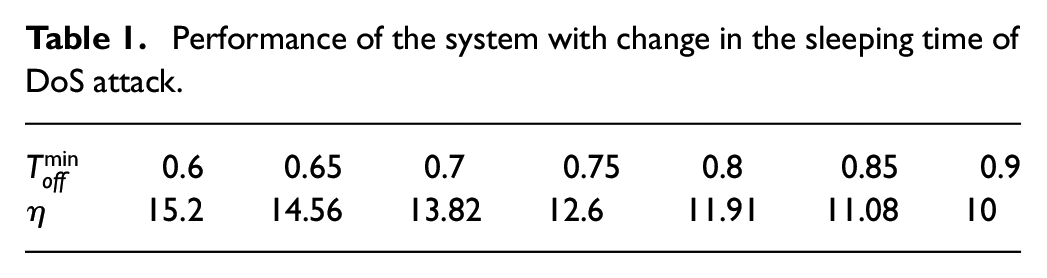
As expected, from these figures, it can be seen that the non-resilient controller could not provide desirable performances in the presence of periodic DoS attacks, and even cause instability. Now, using the proposed method, an attack resilient decentralized controller is designed for the system. All the simulation conditions are the same as the previous experiment except that communication channels are suffering from time-varying delays which contain in . The state responses of the first and second subsystems and the control signals are illustrated in Figures 6–8, respectively. Note that in Figure 8, the blue curve is represented the control signal that is produced by the controller and the red curve is the networked version of the control laws that is available in the actuators. In addition, a comparison of the performance of the proposed method in response to variations in the parameters of the DoS attack is presented in Table 1. In other words, by increasing , and thereby increasing the effects of DoS attacks on the network, -gain decreases.
States of first subsystem (resilient controller).
States of second subsystem (resilient controller).
Control inputs (resilient controller).
Performance of the system with change in the sleeping time of DoS attack.
0.6
0.65
0.7
0.75
0.8
0.85
0.9
15.2
14.56
13.82
12.6
11.91
11.08
10
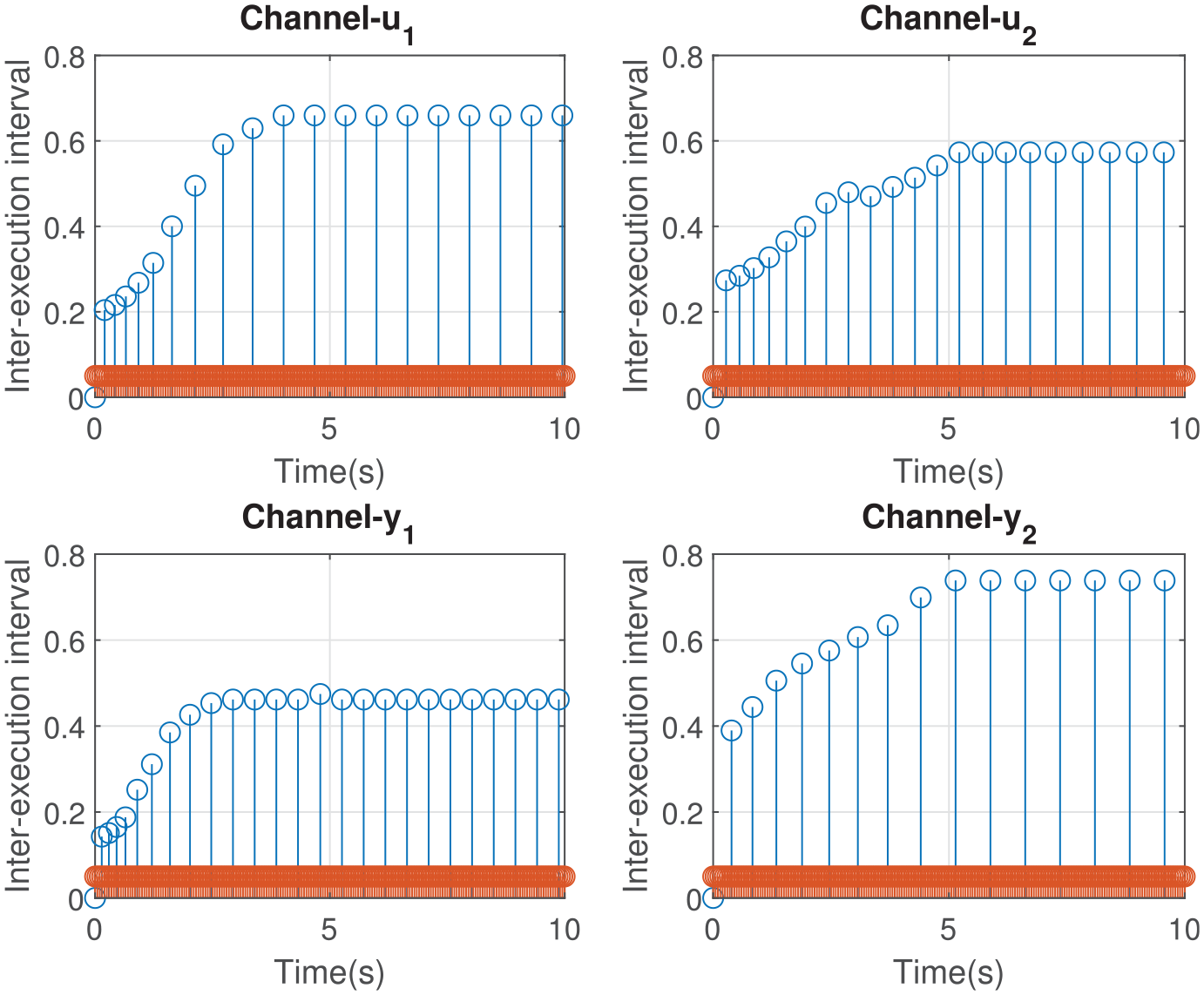
As an additional demonstration of the effectiveness of the proposed event-triggered method, the following experiment is conducted. In this case, the network utilization of the provided method is compared with previous work (Torabi et al., 2021). As noise and disturbances were not considered in Torabi et al. (2021) and in order to provide a similar experimental condition, these effects were not taken into account. The initial conditions of the system are set to and . A further consideration is given to time-varying delays which are contained in . The inter-execution intervals are plotted in Figure 9 where the blue curve is the inter-execution intervals of the method provided in this study and the red curve is the inter-execution intervals of the method provided in Torabi et al. (2021). According to simulations, it has been demonstrated that the proposed method is successful in reducing network resource utilization as compared to Torabi et al. (2021).
Comparison of the inter-execution intervals of the proposed method with the method proposed in Torabi et al. (2021).
From simulation results, it has been demonstrated that (1) the overall closed-loop NCS is -stable from input to the controlled output with a pre-specified -gain , (2) the presented resilient event-triggered mechanism is able to effectively decline the amount of network resource occupancy, and (3) the proposed resilient decentralized event-triggered controller successfully mitigates the effect of periodic DoS attacks while ensures desired system performance.
Conclusion
This study proposes a resilient decentralized dynamic output-feedback controller for the linear time invariant (LTI) NCS subject to the effects of network imperfections, external disturbances, and noise while also being subjected to periodic DoS attacks. A novel hybrid model has been developed based on the idea of time-triggered control, which facilitates the development of an integrated framework to solve the problem of decentralized output-based controller design when the system is subject to periodic DoS attacks. Sufficient LMI-based conditions have been derived to design the controller, and event-triggering parameters simultaneously, which guarantee the -stability of the overall NCS subject to exogenous inputs. In addition, an optimization method has been provided to decline the amount of network resource utilization. By employing a CSTR benchmark, it is demonstrated that the presented method is capable of stabilizing the NCS in order to assure desired system performance regardless of network malfunctions caused by malicious attacks. In future work, dynamic event-triggered communication methods can be employed to optimize network utilization. Through the use of the TS fuzzy approach, the proposed strategy can also be extended to nonlinear dynamic systems. Moreover, the proposed approach can be extended to non-periodic DoS attacks as well as other types of cyber-attacks such as replay attacks, zero-dynamic attacks, and deception attacks.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Jafar Zarei
References
1.
AbdelrahimMPostoyanRDaafouzJ, et al. (2015) Stabilization of nonlinear systems using event-triggered output feedback controllers. IEEE Transactions on Automatic Control61(9): 2682–2687.
2.
AbdelrahimMPostoyanRDaafouzJ, et al. (2018) Co-design of output feedback laws and event-triggering conditions for the L2-stabilization of linear systems. Automatica87: 337–344.
3.
AhmadIGeXHanQL (2021) Decentralized dynamic event-triggered communication and active suspension control of in-wheel motor-driven electric vehicles with dynamic damping. IEEE/CAA Journal of Automatica Sinica8(5): 971–986.
4.
AminiAAsifAMohammadiA (2020) Formation-containment control using dynamic event-triggering mechanism for multi-agent systems. IEEE/CAA Journal of Automatica Sinica7(5): 1235–1248.
5.
BahreiniMZareiJ (2020) Robust finite-time fault-tolerant control for networked control systems with random delays: A Markovian jump system approach. Nonlinear Analysis: Hybrid Systems36: 100873.
6.
BahreiniMZareiJRazavi-FarR, et al. (2019) Robust finite–time stochastic stabilization and fault–tolerant control for uncertain networked control systems considering random delays and probabilistic actuator faults. Transactions of the Institute of Measurement and Control41(12): 3550–3561.
7.
BahreiniMZareiJRazavi-FarR, et al. (2021) Robust and reliable output feedback control for uncertain networked control systems against actuator faults. IEEE Transactions on Systems, Man, and Cybernetics: Systems52(4): 2555–2564.
8.
BansalKMukhijaP (2020) Aperiodic sampled-data control of distributed networked control systems under stochastic cyber-attacks. IEEE/CAA Journal of Automatica Sinica7(4): 1064–1073.
9.
BauerNWDonkersMvan de WouwN, et al. (2013) Decentralized observer-based control via networked communication. Automatica49(7): 2074–2086.
10.
BorgersDPHeemelsWMH (2014) Event-separation properties of event-triggered control systems. IEEE Transactions on Automatic Control59(10): 2644–2656.
11.
CaoJDingDLiuJ, et al. (2021) Hybrid-triggered-based security controller design for networked control system under multiple cyber attacks. Information Sciences548: 69–84.
12.
ChenPZhangDYuL, et al. (2022) Dynamic event-triggered output feedback control for load frequency control in power systems with multiple cyber attacks. IEEE Transactions on Systems, Man, and Cybernetics: Systems52(10): 6246–6258.
13.
De PersisCTesiP (2015) Input-to-state stabilizing control under denial-of-service. IEEE Transactions on Automatic Control60(11): 2930–2944.
14.
DongYXuS (2020) Rendezvous with connectivity preservation problem of linear multiagent systems via parallel event-triggered control strategies. IEEE Transactions on Cybernetics52(5): 2725–2734.
15.
DonkersMHeemelsW (2012) Output-based event-triggered control with guaranteed L∞-gain and improved and decentralized event-triggering. IEEE Transactions on Automatic Control57(6): 1362–1376.
16.
ForniFGaleaniSNešićD, et al. (2014) Event-triggered transmission for linear control over communication channels. Automatica50(2): 490–498.
17.
FuRXuYTangY, et al. (2020) Petri net-based voltage control strategy under false data injection attack. Transactions of the Institute of Measurement and Control42(14): 2622–2631.
18.
GeXXiaoSHanQL, et al. (2022) Dynamic event-triggered scheduling and platooning control co-design for automated vehicles over vehicular ad-hoc networks. IEEE/CAA Journal of Automatica Sinica9(1): 31–46.
19.
GhorbaniSSafaviAANaghaviSV (2021) Event-triggered robust model predictive control for Lipschitz nonlinear networked control systems subject to communication delays. Transactions of the Institute of Measurement and Control43(5): 1126–1142.
20.
GuoLYuHHaoF (2020) Optimal allocation of false data injection attacks for networked control systems with two communication channels. IEEE Transactions on Control of Network Systems8(1): 2–14.
21.
GuoXZhangDWangJ, et al. (2021) Adaptive memory event-triggered observer-based control for nonlinear multi-agent systems under DoS attacks. IEEE/CAA Journal of Automatica Sinica8(10): 1644–1656.
22.
HanYLianJ (2022) Event-triggered control of networked switched systems under network attacks. Transactions of the Institute of Measurement and Control44(6): 1334–1343.
23.
HassaniHZareiJRazavi-FarR, et al. (2019) Robust interval type-2 fuzzy observer for fault detection of networked control systems subject to immeasurable premise variables. IEEE Systems Journal13(3): 2954–2965.
24.
HossainMMPengC (2021) Observer-based event-triggering H∞ LFC for multi-area power systems under DoS attacks. Information Sciences543: 437–453.
25.
HuSYueD (2013) L2-gain analysis of event-triggered networked control systems: A discontinuous Lyapunov functional approach. International Journal of Robust and Nonlinear Control23(11): 1277–1300.
26.
JiangXMuXHuZ (2020) Decentralized adaptive fuzzy tracking control for a class of nonlinear uncertain interconnected systems with multiple faults and DoS attack. IEEE Transactions on Fuzzy Systems29(10): 3130–3141.
27.
JuYDingDHeX, et al. (2021) Consensus control of multi-agent systems using fault-estimation-in-the-loop: Dynamic event-triggered case. IEEE/CAA Journal of Automatica Sinica9(8): 1440–1451.
28.
KargarHZareiJRazavi-FarR (2019) Robust fault detection filter design for nonlinear networked control systems with time-varying delays and packet dropout. Circuits, Systems, and Signal Processing38(1): 63–84.
29.
LaiJLuX (2021) Resilient distributed voltage synchronization of CI networks under denial of service attacks. IEEE Transactions on Circuits and Systems II: Express Briefs68(6): 2052–2056.
30.
LehmannDLunzeJ (2011) Event-based output-feedback control. In: Proceedings of the 19th Mediterranean conference on control & automation (MED), Corfu, 20–23 June, pp. 982–987. New York: IEEE.
31.
LiMChenY (2019) Challenging research for networked control systems: A survey. Transactions of the Institute of Measurement and Control41(9): 2400–2418.
32.
LiWShiYLiY (2019) Research on secure control and communication for cyber-physical systems under cyber-attacks. Transactions of the Institute of Measurement and Control41(12): 3421–3437.
33.
LiXWenCChenC (2020) Resilient cooperative control for networked Lagrangian systems against DoS attacks. IEEE Transactions on Cybernetics52(2): 836–848.
34.
LiuGHuaCLiuP, et al. (2020) Stabilization and data-rate condition for stability of networked control systems with denial-of-service attacks. IEEE Transactions on Cybernetics52(1): 700–711.
35.
LiuSHuZWangX, et al. (2018) Stochastic stability analysis and control of secondary frequency regulation for islanded microgrids under random denial of service attacks. IEEE Transactions on Industrial Informatics15(7): 4066–4075.
36.
LiuYJinJ (2021) Hybrid-driven control of networked switched systems with random cyber attacks. Transactions of the Institute of Measurement and Control43(10): 2402–2409.
37.
MaYSCheWWDengC (2022) Dynamic event-triggered model-free adaptive control for nonlinear CPSs under aperiodic DoS attacks. Information Sciences589: 790–801.
38.
ManandharKCaoXHuF, et al. (2014) Detection of faults and attacks including false data injection attack in smart grid using Kalman filter. IEEE Transactions on Control of Network Systems1(4): 370–379.
39.
MiXLiS (2016) Event-triggered MPC design for distributed systems with network communications. IEEE/CAA Journal of Automatica Sinica5(1): 240–250.
40.
MustafaADharNKVermaNK (2019) Event-triggered sliding mode control for trajectory tracking of nonlinear systems. IEEE/CAA Journal of Automatica Sinica7(1): 307–314.
41.
PanYWuYLamHK (2022) Security-based fuzzy control for nonlinear networked control systems with DoS attacks via a resilient event-triggered scheme. IEEE Transactions on Fuzzy Systems30(10): 4359–4368.
42.
PengCYangTC (2013) Event-triggered communication and H∞ control co-design for networked control systems. Automatica49(5): 1326–1332.
43.
SaeediMZareiJRazavi-FarR, et al. (2021) Event-triggered adaptive optimal fast terminal sliding mode control under denial-of-service attacks. IEEE Systems Journal16(2): 2684–2692.
44.
ShangYLiuCLCaoKC (2021) Event-triggered consensus control of second-order nonlinear multi-agent systems under denial-of-service attacks. Transactions of the Institute of Measurement and Control43(10): 2272–2281.
45.
ShaoXYeD (2020) Fuzzy adaptive event-triggered secure control for stochastic nonlinear high-order MASs subject to DoS attacks and actuator faults. IEEE Transactions on Fuzzy Systems29(12): 3812–3821.
46.
SunJYangJLiS (2019) Reduced-order GPIO based dynamic event-triggered tracking control of a networked one-DOF link manipulator without velocity measurement. IEEE/CAA Journal of Automatica Sinica7(3): 725–734.
47.
SunXGuZYangF, et al. (2021) Memory-event-trigger-based secure control of cloud-aided active suspension systems against deception attacks. Information Sciences543: 1–17.
48.
SunYYuJYuX, et al. (2020) Decentralized adaptive event-triggered control for a class of uncertain systems with deception attacks and its application to electronic circuits. IEEE Transactions on Circuits and Systems I: Regular Papers67(12): 5405–5416.
49.
TabuadaP (2007) Event-triggered real-time scheduling of stabilizing control tasks. IEEE Transactions on Automatic Control52(9): 1680–1685.
50.
TianZ (2021) Dead band feedback-based scheduling approach for networked control system with variable sampling period. Transactions of the Institute of Measurement and Control43(6): 1478–1500.
51.
TorabiAZareiJRazavi-FarR, et al. (2021) Decentralized resilient output-feedback control design for networked control systems under denial-of-service. IEEE Systems Journal16(4): 5620–5629.
52.
WanYWenGYuX, et al. (2020) Distributed consensus tracking of networked agent systems under denial-of-service attacks. IEEE Transactions on Systems, Man, and Cybernetics: Systems51(10): 6183–6196.
53.
WangPBRenXMZhengDD (2021) Event-triggered resilient control for cyber-physical systems under periodic DoS jamming attacks. Information Sciences577: 541–556.
54.
WangZZhangBXuX, et al. (2022) Research on cyber-physical system control strategy under false data injection attack perception. Transactions of the Institute of Measurement and Control. Epub ahead of print 12January. DOI: 10.1177/01423312211069371.
55.
XieXLiSXuB, et al. (2022) Resilient adaptive event-triggered H∞ control for networked stochastic control systems under denial-of-service attacks. Transactions of the Institute of Measurement and Control44(3): 580–594.
56.
XuYGuoG (2022) Event-triggered control of connected vehicles under multiple cyber attacks. Information Sciences582: 778–796.
57.
YangMZhaiJ (2022) Observer-based switching-like event-triggered control of nonlinear networked systems against DoS attacks. IEEE Transactions on Control of Network Systems9(3): 1375–1384.
58.
YinXGaoZYueD, et al. (2022) Cloud-based event-triggered predictive control for heterogeneous NMASs under both DoS attacks and transmission delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems52(12): 7482–7493.
59.
ZhangLNguangSKYanS (2021) Event-triggered H∞ control for networked control systems under denial-of-service attacks. Transactions of the Institute of Measurement and Control43(5): 1077–1087.
60.
ZhangTYYeDGuoG (2022) Distributed event-triggered control for multiagent systems under denial-of-service attacked topology: Secure mode strategy. IEEE Transactions on Systems, Man, and Cybernetics: Systems52(10): 6534–6544.
61.
ZhangXMHanQLGeX, et al. (2019) Networked control systems: A survey of trends and techniques. IEEE/CAA Journal of Automatica Sinica7(1): 1–17.
62.
ZhaoXQiYYuanS, et al. (2020) Decentralized event-triggered control for switched systems under stochastic cyber attacks and actuator failures. In: Proceedings of the 39th Chinese control conference (CCC), Shenyang, China, 27–29 July, pp. 1243–1248. New York: IEEE.
63.
ZhaoXZouSMaZ (2021) Decentralized resilient H∞ load frequency control for cyber-physical power systems under DoS attacks. IEEE/CAA Journal of Automatica Sinica8(11): 1737–1751.