
Abstract
Local actors are to an increasing extent engaging in national and European Union (EU)–based development and sustainability agendas. These ventures often materialize in the form of temporary organizations such as pilots and projects. This article contributes to debates on project-based, experimental and temporary organizations by unpacking the organizational architecture of pilots and analyzing how the democratic autonomy of local public actors is formed. Through the example of smart city pilots, the study shows how a range of intersecting relations and hierarchies enable and circumscribe public-sector autonomy—from local actors’ attempts to align pilots with political goals to the limitations of standardized and scalable knowledge and strict funding requirements.
Keywords
Introduction
A steady stream of funding opportunities is currently creating incentives for local actors to participate in the pursuit of national and European Union (EU)–based innovation agendas. These processes materialize in temporary organizations such as pilots and EU projects, many of which are set in the context of local public administrations (cf. Haarstad, 2017; Lange & Knieling, 2020). The general aim of pilots, which are in focus here, is “to test or develop new solutions” (van Winden & van den Buuse, 2017, p. 51). Examples include testing policy innovations such as new forms of democratic participation or e-government schemes, as well as sociotechnological innovations such as autonomous buses or smart housing solutions. Pilots are performed in collaborative settings, and several reviews have shown that local public actors are generally included in some capacity (Bulkeley & Castán Broto, 2013; Kronsell & Mukhtar-Landgren, 2018). One reason for their inclusion is that a large number of pilots are related to areas situated within local jurisdiction, such as housing or transport planning, and another is that funding institutes often require collaboration, and the inclusion of local public actors is often a prerequisite for the award of funding.
The increase of local administrative presence in externally funded projects and pilots is currently being theorized in two broad theoretical debates—public-sector projectification (Fred, 2020; Hodgson et al., 2019; Sjöblom et al., 2015) and debates on local innovation and experimental governance (Bulkeley & Castán Broto, 2013; Mukhtar-Landgren et al., 2019; Raven et al., 2019; Späth & Knieling, 2020). The increasing incidence of projects and pilots in public-sector organizations has been described as examples of broader “macro-political trends towards de-centralised and ‘post-bureaucratic’ organisational arrangements” (Bailey et al., 2019, p. 130; cf. Ettelt & Mays, 2019; Lange & Knieling, 2020; Vento & Kuokkanen, 2020). In parallel, the ambitions to open up decision-making processes to facilitate local innovation and urban experimentation have indicated a tendency toward depoliticization (Caprotti & Cowley, 2017; Cowley & Caprotti, 2019). In the context of local development, these emerging governance forms have been described in terms of a “corporatization of city management . . .” (Joss et al., 2019, p. 5), where the incidence of network-based temporary structures and the strong influence of private actors are being problematized (Kitchin, 2015; Söderström et al., 2014). While these studies tend to emphasize more overarching governance processes, there is still a lack of knowledge on the role of public actors in one of its main organizational forms—the pilot. This study contributes to these debates by specifically focusing on the democratic autonomy of public actors in pilots.
Aim and Outline of the Study
The point of departure of this study is that local autonomy is a democratic value based in the ideal that political decisions are to be taken as close as possible to the citizens affected (Ladner, 2017, p. 26f). As such, the autonomy of public actors in processes of administrative and organizational change is central from a democratic perspective. Against the normative backdrop of local democracy, the aim of this study is to contribute to debates on temporary organization and new forms of local governance by unpacking and theorizing the relative autonomy of local public actors in pilots. This study thus asks, “How does the organizational architecture of pilots create and affect the autonomy of local public actors?”
In organizational terms, pilots are temporary organizations existing within, but also outside, formal local organizations (cf. Ahrne & Brunsson, 2011, p. 84; cf. Ahrne & Brunsson, 2019). They constitute a formalization or a “decision” that fixates the openness of network-based innovation ventures into a formal (albeit temporal) organizational form (cf. Ahrne & Brunsson, 2019, p. 4). One area where these forms of governance is currently being debated and theorized is the smart city context, the empirical example used in this study.
The smart city agenda is strongly promoted by the European Commission and national governments, and more than half of European cities with over 100,000 inhabitants have either implemented or proposed smart city endeavors (Haarstad, 2017, p. 423). Two understandings of the smart city recur in the literature: first, the centrality of information and communication technologies (ICT), data, and platforms, and second, an emphasis on the necessity of implementing these technologies through collaboration between public and private actors (Haarstad, 2017, p. 424), including a “dominant belief that transformation of governance is desirable and needed to make cities smart” (Meijer & Bolívar, 2016, p. 400). As such, there is a strong push to introduce new forms of governance in these processes, including new forms of collaborative and temporary organizations.
There is an ongoing, yet still quite limited, debate on the role, action space, and autonomy of the public sector in smart city endeavors (e.g., Berglund-Snodgrass & Mukhtar-Landgren, 2020; Nesti, 2020; Späth & Knieling, 2020), including calls for the need to focus on the political and democratic implications of these new network-based forms of governing urban development (Caprotti & Cowley, 2017; Karvonen et al., 2020). Yet, it is important to remember that although smart city governance implies—and explicitly promotes—fluidity and networks, (smart city) pilots are, as mentioned above, solid organizational forms. This study contributes to these debates by unpacking the organizational elements of pilots and analyzing the many different ways that local democratic autonomy is continuously formed through them. This is done through Ahrne and Brunsson’s theory on partial organizations, which also emphasizes how a particular organizational configuration “makes a difference for those involved” (Ahrne et al., 2017, p. 298).
The article is structured as follows. The next section positions the analysis in relation to previous research on public-sector projectification, collaboration, and urban experimentation. I then outline the theoretical framework for analyzing local autonomy through the elements of organization, before presenting the methods and empirical material. Finally, the conclusion and contribution of the study are related to ongoing debates on how local autonomy is affected by, and exercised in, temporary organizations in processes of urban development.
Positioning the Analysis—Previous Research on Temporary Organizations
This section situates the analysis in three broad organizational trends relating to temporary organizations in local administrative practices. First, pilots are embedded in the context of innovation through experimentation. Urban experimentation has been described as a process where actors are provided the opportunity to test new ideas and try out innovations in real time (McFadgen & Huitema, 2017). There are many different forms of organization ranging from testbeds and labs to the more delimited pilots analyzed here. The general ambition is to support knowledge production and scale-up when results that are deemed fruitful (see, for example, Bulkeley et al., 2019; Sengers et al., 2020; Voytenko et al., 2016). Accordingly, a key aspect of experimentation is learning (Evans et al., 2016, 2021; van Winden & van den Buuse, 2017), with the notion of “learning from doing” acting as a core legitimizing logic (Kronsell & Mukhtar-Landgren, 2020; cf. Caprotti & Cowley, 2017). The strong emphasis on generating knowledge is matched by the emphasis on spreading knowledge (von Wirth et al., 2019), for instance, through the usage of best practices to dissimilating results.
As knowledge production is central to experimentation, so are processes of evaluation and monitoring. Ettelt and Mays (2019) describe pilots as “an intellectual cornerstone of evidence-based policy (EBP), as they hold out the promise, at least ostensibly, that policy will be rigorously tested before being rolled out more widely” (p. 19). In policy making, pilots have been described as to “replace ideologically-driven policy making with a more rationalist, scientific approach where decision-making is driven instead by clear empirical questions of ‘what works’ and ‘how’” (Bailey et al., 2019, p. 130). This also means that a certain form of knowledge becomes relevant, that is, the form that is possible to measure and evaluate.
Second, pilots are temporary and project-based organizations (cf. Bailey et al., 2019; Ettelt & Mays, 2019). The incidence of both temporary (Kenis et al., 2009; Lundin et al., 2015) and project-based work has increased in public-sector organizations, a phenomenon that has been theorized in terms of public-sector projectification (Fred, 2020; Godenhjelm, 2016; Godenhjelm et al., 2015; Hodgson et al., 2019). In the context of public administration, these temporary organizations are often cognitively and conceptually contrasted against the permanent organizations, where the “permanent” is often represented by bureaucracy, continuity, and the legitimating notions of accountability and legality (Sjöblom & Godenhjelm, 2009). Temporary organizations, such as projects, are often perceived as an inherently nonbureaucratic way of organizing public-sector activities (cf. Fred, 2018; Packendorff & Lindgren, 2014). They are often motivated by a desire to break with business-as-usual to try something new, an ideal which is mirrored in the assumption that the lack of bureaucratic structure leads to increased flexibility (Fred, 2018, p. 3, cf. Sjöblom et al., 2019; Vento & Kuokkanen, 2020). Besides the emphasis on flexibility, projects are associated with clear demarcation, focus, and solution orientation (Sjöblom et al., 2019, p. 21). Pilots share with project organizations a strong emphasis on controllability and predictability—they generally have a set time frame, a distinct budget, a project manager/management team, and they are structured in delimited tasks in, for example, Gantt schemes or clear work packages (cf. Ettelt & Mays, 2019, p. 20). This aspect stands in contrast to the suggested flexibility of projects, but also—and in the same way—to the image of experiments as being more “fluid, open-ended, contingent and political” (Raven et al., 2019). As such, pilots—in a similar capacity as projects—can be said to institutionalize the dual notions of freedom and creativity on one hand and control and predictability on the other hand (cf. Fred, 2018, p. 22; Sahlin-Andersson & Söderholm, 2002), a paradox sometimes described in terms of an innovation dilemma (den Hond et al., 2019).
In a similar way, projectification scholars have problematized the relationship between temporary and permanent organizations with regard to monitoring and learning. One such debate concerns the potential of projects to contribute to solving long-term challenges and generating institutional change (see, for example, Johansson et al., 2007; Munck af Rosenschöld, 2019). Whereas the literature on experimentation tends to emphasize the dissemination of knowledge outside the organization, the projectification literature elevates the challenges for the permanent organization to learn and implement changes (Jensen et al., 2018). Both these dimensions can provide insights for the study of smart city pilots.
Finally, pilots are collaborative forms of organizations. There is an increasing pressure on public-sector organizations to promote innovation through collaboration and the inclusion and empowerment of nonpublic actors (Ek Österberg & Qvist, 2020; Vaaben, 2013, p. 219). This is often put forward in the context of smart city development, where there is a general belief in governance based on including the knowledge and expertise of several different actors (Nesti, 2020). Previous research on governing smart mobility has shown that public actors frequently use collaboration as a policy instrument (see, for example, Karlsson et al., 2020; Mukhtar-Landgren & Paulsson, 2020). Collaboration is continuously performed through interactions between its members (cf. Chaib, 2018, p. 26) and, in the broader context of pilots and experimentation, this includes a variety of designs ranging from more formalized quadruple helix models to processes of co-creation or co-production with citizen groups, or more informal forms of collaboration such as workshops or conferences (e.g., Menny et al., 2018; Voytenko et al., 2016).
Summing up, smart city pilots are situated in an institutional context of temporary, collaborative, experimental, and projectified organizations. In practice, these characteristics are highly interrelated (as, for instance, almost all experiments are collaborative and temporary). As indicated above, the role of public actors in pilots, projects, and experiments has been discussed in relation to different aspects of local governance, ranging from studies of learning to the analysis of policy instruments in collaborative practices. This analysis draws on these insights and hopes to contribute to broader debates on temporary organizing in local administrative practices by zooming in on the autonomy of local public actors in these endeavors, using the case of smart city pilots. But first, the next section specifies the analytical framework and outlines the concepts local autonomy and organizational elements.
Analytical Framework: Analyzing Local Autonomy Through the Elements of Organization
Local autonomy, which in essence is a democratic value (Ladner, 2017), is generally seen as concerning municipalities’ legal possibilities to decide over their own matters, as well as their access to resources to do so in practice (Schwab et al., 2017). Research in this field is generally centered around relative local autonomy in intergovernmental relations (Fleurke & Willemse, 2006), and comparative studies of local self-government and autonomy are a long-standing tradition. It has been argued that accounts of local autonomy tend to be too descriptive (Lidström, 1999, p. 98) and often overlook issues relating to local discretion in practice. In the words of Fleurke and Willemse (2006), it may be more accurate to approach local autonomy through an analysis of administrative practices and “what local government actually does and does not do” (p. 73).
Parallel to this argument, debates on local autonomy are shifting from studies of the different tiers of government to broader debates considering the changing conditions for local government. These debates relate both to the incidence of “networks of actors with blurring borders” and to the increasing fluidity between the public and private actors in local government settings (Ladner, 2017, p. 23; cf. Eckersley, 2017; Schwab et al., 2017). Smart city initiatives and the processes of experimentation, collaboration, and projectification mentioned above are examples of both these tendencies: Pilots are generally funded (and through this governed) by higher tiers of government and, at the same time, they include different stakeholders (including researchers, private actors, and consultants). As such, questions of local autonomy are brought to the fore in regard to both the multilevel and the network-based context of local administrative practices. The analysis follows Schwab et al.’s definition of local autonomy as “the municipalities’ and counties’ power to determine public action in their jurisdiction, to set policy priorities, to decide upon organisational matters and to manage their resources . . .” (Schwab et al., 2017, p. 14). It brings together theoretical insights on local autonomy from previous studies with the organizational study, as will be outlined below.
In a pilot, the collaborative and multilevel structure of local innovation has been formalized into a specific organizational form, in which local public actors are one of several participators. In the vocabulary of Ahrne and Brunsson (2019), this process of temporarily stabilization is “a decision,” and the organization that is formed is a “decided order” (p. 4). A decision is based on relationships, and creating a formal organization also “creates a specific type of relationship” among the different actors involved (Ahrne & Brunsson, 2019, p. 7). The difference between a (smart city) network and an organization (such as a pilot) is that the latter consists of an order where a number of elements are decided (Ahrne & Brunsson, 2011; cf. Haug, 2013, p. 714). Ahrne and Brunsson identify five “organizational elements,” which are based in these decisions. These are taken by individuals or groups in relationships. The first element, membership, concerns making decisions about which persons or groups are to be included (and excluded) as members of the organization. The second element is rules, which determine what members are expected to do. The third element concerns processes of monitoring, the fourth relates to the sanctions imposed, and the fifth element is hierarchies, which concerns “how decisions shall be made and who shall make them” (Ahrne & Brunsson, 2019, p. 8).
The organizational elements outlined above do not form organizations through a single decision, but in “processes of decisions” (Ahrne et al., 2016, p. 95), entailing that the different ways that pilots can be, for instance, hierarchical or rules-based, needs to be identified empirically (cf. Rasche & Siedl, 2019, p. 41). In addition, these elements may emanate from both inside and outside the organization, where standards or benchmarking schemes can be seen as examples of rules emanating from outside the organization (Ek Österberg & Qvist, 2020). This study uses the five organizational elements to unpack these decisions (cf. Ahrne & Brunsson, 2019) and analyze the autonomy of local public actors to decide on organizational matters and set policy priorities (Schwab et al., 2017, p. 4) in them. As the analysis will show, this includes issues such as analyzing who makes decisions on membership in pilots, the role of EU-funding criteria in deciding on rules, and the importance of evaluation and scalable knowledge for monitoring. The analysis highlights different ways that these five organizational elements are brought together, thereby illustrating the shifting ways that pilots continuously reconfigure local administrative autonomy. This methodological approach will be specified below.
Methodology and Cases
The analysis is based on pilots within the field of smart mobility, an umbrella concept used to label (and promote) technological innovations related to ICT and platform-based solutions within the transport field (Docherty et al., 2018; Marsden & Reardon, 2018). The empirical material consists of interviews with local administrators involved in smart city pilots in Sweden, Finland, Norway, and Denmark, four Nordic countries that are decentralized unitary states with several social, political, and administrative similarities. The Nordic states all have a strong tradition of local self-government, including a comprehensive planning model with a strong local mandate (Fredricsson & Smas, 2015). Urban traffic planning is part of local jurisdiction, yet it intersects with regional jurisdiction when related to public transport and state regulations related to infrastructure. In addition, the Nordic countries have strong innovation agendas, with aims relating to both sustainability and competitiveness (Sjöblom et al., 2019, p. 21). Smart city ventures and pilots can be seen as parts of these schemes. All these countries are currently engaged in the smart city agenda, with smart city pilots initiated in several cities.
The source material consists of 21 interviews carried out between 2018 and 2020 with (a) municipal actors, including urban and transport planners, development managers and coordinators; (b) intermediary actors (i.e., organizations that act as brokers between two or more parties, Hakkarainen & Hyysalo, 2016, p. 46); and (c) representatives from funding agencies and private actors (see the appendix). In addition to interviews, two focus groups were arranged with a total of six urban planners who participated in different smart mobility pilots. The analysis also draws on participatory observations at a number of workshops and conferences during the study period, as well as desktop studies of documents/webpages on both the specific pilots as well as more general information from funding and innovation agencies within the field of smart mobility in all four countries. This includes an analysis of calls for funding within the field of smart mobility during the study period.
As urban mobility issues are part of transport and urban planning processes, municipalities were considered key actors in all pilots. Initially, the study was centered around four specific pilots (see the appendix), but during the course of the interviews, it became evident that different smart mobility pilots overlapped and the same pilot was often included in several different projects with diverging aims. For instance, a larger EU-funded pilot with autonomous buses could spin off into smaller projects concerning urban visioning or travel behavior among different groups. The civil servants often spoke more generally on the theme of working with smart mobility pilots, although questions were often centered on specific pilots. The study has the character of a multiple case study and, despite four municipalities being involved, it is not comparative in its approach. However, differences between pilots are sometimes discussed with the ambition to show complexities (e.g., some were led by the municipality, and others not), rather than with the ambition to compare countries.
The different processes through which local autonomy unfolds was analyzed in two steps. First by unpacking the decisions that constitute the elements of organization, and then by analyzing the autonomy of public actors to participate in or influence them. The empirical material was thus first coded and analyzed in accordance with the five organizational elements (membership, rules, monitoring, sanctions, and hierarchies). In relation to each element, I then analyzed local autonomy by assessing the action space of the municipal actors vis-à-vis other actors in these processes, thereby emphasizing the relational aspects highlighted in Ahrne and Brunsson’s framework. Here, I used the definition of Schwab et al. (2017) described above, highlighting the municipalities autonomy to (a) decide on organizational matters and (b) to set policy priorities (p. 4).
It quickly became evident that five organizational elements overlapped in the empirical analysis of the pilots. For example, memberships created hierarchies (i.e., between project managers and project members), and sanctions were related to rules and forms of monitoring. In presenting the empirical material, I chose to discuss one category at a time (with the two shorter sections on monitoring and sanctions combined in one section), and instead of simplifying the analysis, I opted to account for the complexity of the organizational configuration. As such, the analysis will show that pilots are, for instance, hierarchical in different ways, where the autonomy of public actors is affected by several elements, ranging from membership (being the project manager or not) to the configuration of procedures for evaluation and monitoring. The five elements of organization thereby functioned as both a framework for operationalizing the different features of pilots and a tool to analyze the potential spaces of local administrative autonomy.
Analysis—Local Autonomy in Smart City Pilots
In this section, I will use the five organizational elements to unpack and analyze the autonomy of local public actors in smart city pilots, here understood in terms of the relative action space to decide on organizational matters and set policy priorities (cf. Schwab et al., 2017, p. 4). The analysis highlights different ways that the elements are brought together, thereby illustrating the shifting, paradoxical yet interrelated ways that pilots continuously reconfigure local administrative autonomy in smart city development.
Membership
. . . we need to work in a cross-functional way. For example, a vehicle manufacturer cannot trigger this development only by itself; neither can a city facilitate the transformation of mobility without working closely with lots of other stakeholders. (The Strategic Innovation Platform Drive Sweden, webpage 2019)
Above, pilots were described as a decision where actors moved from being parts of a network to becoming members of a temporary organization. Membership is a decision that is inherently based in including, and simultaneously excluding, actors in an organization (Ek Österberg & Qvist, 2020). Previous smart city research has elevated questions of who is being included in collaborative endeavors, indicating an incidence of “tensions . . . between techno-centric and citizen-centric dimensions of smart cities” (Morgan & Webb, 2020, p. 85; cf. Cardullo & Kitchin, 2019). Choosing and assigning the rights to participate (and receive funding) also entails the basis of a formal hierarchy (another of the organizational elements), as it allocates the rights to make binding decisions (cf. Ahrne & Brunsson, 2011, p. 86), typically to the lead partner or project manager. This organization or actor has (typically) written the application. Through the process of applying for funding, members are chosen, and through their inclusion each member (industry, researchers, the municipality, or a civil society organization) is given a particular task, ranging from appointed member of a steering group to an evaluator. These different positions affect the autonomy and relative action space of the different actors.
In terms of local autonomy, local administrations can choose to be project owners or mere partners and therefore have varying roles and autonomy. When participating as a mere partner, membership is restricted to the allocation of responsibility by the project manager. In contrast, when local public actors lead the project, they have a greater autonomy through their possibility to decide on organizational matters within the pilot. In the smart mobility pilots we analyzed, local administrators were generally not project managers, although in some cases they had initiated a spin-off project related to the pilot. Yet, membership in pilots gives (at least hypothetically) local administrators the opportunity to set policy priorities by placing requirements or even issuing demands in relation to the pilot. These may include requirements relating to safe-guarding public values such as sustainability, accessibility, or inclusion in the processes of developing and testing autonomous buses. As part of the interview studies, we asked respondents whether they made demands or placed requirements in the pilots. Here, our respondents generally reported that the pilots were merely exploratory and in an early stage, so their role as planners was not to issue demands, but rather to “open up” and facilitate the innovation process by providing the pilot project members with access and input (cf. Wallsten et al., 2021). Yet, it is important to note that the pilots analyzed here were centered around automobility/self-driving vehicles and were generally perceived as being almost futuristic and therefore far from addressing “real-life” planning aspects (Berglund-Snodgrass & Mukhtar-Landgren, 2020). As such, local administrators may well be raising more demands in pilots that are “closer to home.” The point is that membership in pilots opens up a possibility for public actors to raise demands, and it is an empirical question whether or not they choose to do so.
Rules
Rules set out expectations of members, including coordinating what they should do, when to do it, how they should meet, and which common goals are to be achieved (Ahrne & Brunsson, 2019, p. 10; Rasche & Siedl, 2019). In pilots, these decisions relate to choices concerning project models, methods, Gantt schedules, work breakdown structures, and deliverables. These create other forms of hierarchies than the ones mentioned above and are enforced by the lead partner or project management team. The pilot management team also orchestrates necessary arenas, such as working group meetings, in which the organization unfolds (cf. Haug, 2013), and it upholds the implementation of work packages through a bureaucracy-like structure based on milestones, role allocations, and deliverables. Management teams thus have the autonomy to decide not only through decisions on memberships but also through rules. One example that also exemplifies the two final elements, monitoring and sanctions, was brought up by an experienced project manager, now working as a civil servant at the municipality. He had recently been managing two smart mobility projects (owned by the municipality) in which they had chosen to demand that members participate in a set number of meetings and deliver data every month. In addition, he stated that “we had chosen to revoke funding if they do not,” which is here interpreted as a sanction: I don’t think it’s happened too often . . . Those who work in pilot projects are usually willing to see a change. But we have built in agreements and procedures early on as to try to get what we want. (Project manager, interview)
He also noted that other pilots can be less strict in this regard: “you want to test things—and yet you have very flimsy wordings in contracts between project partners” (Project manager). By focusing on organizational elements, such as rules and sanctions, we can see how members are given different degrees of autonomy and action space to decide on organizational matters but also to set policy priorities by choosing project goals. It also illustrates how every decision relating to these elements reflects and constitutes a relationship where, as a project manager notes, some persons “are extremely square and follow the process to the letter, [while] others are more pragmatic in their approach . . .” (Project manager, interview). This means that the autonomy of public actors varies considerably within pilots, depending not only on whether or not the municipality leads the project, but also on the relative assertion of the project-leading part, be that an ICT company or a group of researchers.
Besides the internal rules described above, rules may also emanate from outside the organization (cf. Ahrne & Brunsson, 2019). The application processes in itself involves a hierarchy, relating to the relationship between the funder and the applicant of a pilot. Funding agencies set up requirements, and several of these are organizational, including requiring applicants to collaborate, to include certain types of stakeholders, or to use certain standards for budgeting, monitoring, evaluating, or accounting for results (cf. Kitchin et al., 2015). The requirements from funders will determine both the possibility to decide on organizational matters and the possibilities for the municipality to align the pilot with local political goals. As noted by one of the urban planners, smart mobility pilots are “always funded from elsewhere, and actually most of them are EU-funded . . . we are not a very rich municipality, so we need funding” (Urban planner, interview). As noted by Lange and Knieling (2020), municipalities seeking EU funding for smart city projects “ . . . have to fulfil precise standards and targets regarding smart city development, adapt to the regulatory requirements of the EU and fulfil the agreed project framework” (p. 108), which in turn hampers and circumscribes the autonomy of local actors in relation to setting policy priorities.
This is also indicative for project and pilot funding by national funding agencies. To exemplify, the Swedish innovation agency Vinnova announced a call in 2017 for applications “supporting the growth of combined mobility services by enabling tests and validations of these services through real relationships and with real customers,” and required potential applicants to not only test the solution but also to test its business model and to include “real users” (Vinnova, 2017). In this call, the organizational infrastructure of the pilot was largely determined by external requirements, leaving limited space for local autonomy. This particular configuration of rules and hierarchy highlights how project funding for smart city transformation is a policy instrument or a tool applied with the purpose of encouraging, aiding, and promoting the smartness agenda in quite specific ways (cf. Haarstad, 2017).
The tendency to set excessively high requirements in calls has been noted in research (e.g., Lange & Knieling, 2020), but the need to balance freedom and control in funding smart mobility pilots is also recognized by the funding actors themselves. In an interview, a respondent from a national funding body (for innovation in the mobility field) noted that there had been a tendency for requirements to be too narrow: We went into it with some kind of naive vision that you could get almost a tool that you could apply to a project and then see which effects it had—but that didn’t really happen . . . (Head of state funding institute).
Funding smart city pilots is a way for states (and the EU) to implement national innovation schemes through local governments in a multilevel context. In terms of local autonomy, this highlights how the autonomy of local public actors to align the pilot with local goals varies considerably: not only in the requirements for funding but also, as we will see below, in the structures for reporting results and deciding on so-called “deliverables.”
Monitoring and Sanctions
As examples of both projects and of urban experiments, the goals of smart city pilots are closely associated with the quest for knowledge. In turn, the centrality of knowledge means that they are configured through a number of decisions relating to monitoring, but also to rules relating to how monitoring should be conducted. As the pilot and its funders are focused on attaining (and monitoring) goals, the goals constitute a decision of strong hierarchical effect.
In relation to goals, previous literature on smart cities, as well as studies of smart mobility pilots, has shown that these pilots have “a strong technological bias,” including an emphasis on technology over broader societal goals such as sustainability (Kitchin et al., 2015; Manders et al., 2018). This is also evident in the lingo of the smart city literature, where the emphasis on labs, tests, phases, projects—and pilots—can be derived to “the technological origins and inflection” of smart cities (Joss et al., 2019, p. 18). This hierarchy is also clear in the empirical material. As noted by one of the urban planners, . . . [w]e build our processes around technology. We do not look at the processes and we very rarely have an open process and go out and talk to the citizens about what city they want; what kind of feeling do they need? How do they want to live their everyday lives? (Urban planner)
The bias toward technological knowledge is also strengthened by the organizational form of the pilot. Pilots are often seen as rational instruments “allowing policy makers to test the validity of policy promises through scientific evaluation of their success or otherwise before decisions are made on the wider implementation of policy” (Bailey et al., 2019, p. 130). This also relates to a third aspect brought up by planners with regard to hierarchies between different types of knowledge in pilots, the question of specialized versus general knowledge. Here, one form of limitation is posed by the monitoring instrument. Monitoring is often closely connected to standards (cf. Brunsson, 2019, p. 118), and in international pilots such as ones funded by the EU, there is also a need to compare results between pilots, thereby reinforcing the need for uniform assessment tools. Smart city pilots are embedded in a broader, even transnational, smart city narratives (Joss et al., 2019, p. 4), they adhere to international standards and frameworks (Arellano-Gault et al., 2013, p. 162) and participate in international benchmarking practices and dissemination of best practices. In addition, the heavy emphasis on evaluations tends to mean that goals are delimited and quantifiable, where one very specific aspect, technology or function, is set center stage and evaluated. This may pose a problem for local planners (cf. Morgan & Webb, 2020). As noted by one of the traffic planners we interviewed, We have to back or reverse . . . they [actors promoting pilots] talk about a specific car parking solution, but I need to think about the overall transport needs in the area. (Traffic planner)
This need for different types of knowledge can be understood in terms of the actors having different points of departure, yet it affects the autonomy of local public actors in regard to their possibilities of relating pilots to local political policy priorities. This was also raised in a focus group with urban planners, where one of the respondents felt that the knowledge local planners actually sought after was not necessarily being taken into consideration in the smart city pilots in the municipality, including, . . . knowledge related to how to build the city together, decrease the socio-economic cleavages between groups . . . we would have needed that, and it would be easier to bring that to the politicians. (Urban planner)
As such, the relationship between actors and the emphasis on particular kinds of knowledge again reconfigures the hierarchies between public and private actors. While the public actors depend on, and refer to, the strength of the political mandate, local routines, and broader policy goals, they also find it hard to defend the necessity for that form of knowledge. There are many different explanations as to why this is the case; one is that it often is the project manager and/or the external funder that determines what type of knowledge is sought after, not the municipality. Another explanation is that the pilot logic is based on scalable results—and certain types of knowledge are simply easier to quantify, measure, and present in a comparable way. Here, knowledge on problems such as “decreasing the socio-economic cleavages,” as mentioned in the quote above, is more difficult to quantify. This may well be amplified by the technological bias that permeates smart city development in a more general sense.
Hierarchies
The analysis above has illustrated the different ways in which hierarchies are configured through decisions concerning rules, monitoring, and sanctioning. But pilots and projects do not exist in a vacuum, and context matters in relation to cognitive and even historical relations and hierarchies between the members (cf. Engwall, 2003). One such example is the trajectory and relation between public and private actors in urban planning: One has to understand that this project is not part of the regular work processes here . . . the municipality has worked out strategies jointly, a traffic strategy, a green plan with development planning, and they have been valid for a few years now. (Traffic planner)
As indicated in the quote above, some planners are dismissive about “allowing” the pilot to influence the everyday procedures of “real” urban planning, referring to the hierarchy between temporary and permanent organizations. Questions of what is included in local jurisdiction and competencies also influences the inclination of public actors to get involved in pilots. The planner quoted above is referring to a relationship within the political organization, where there is a clear hierarchy between implementing political decisions or plans on the one hand and contributing to temporary projects or pilots on the other hand. This is well noted in the literature on public-sector projectification and can also be related to the fact that public organizations are political and thereby considered (at least by public administrators) to be more legitimate with regard to making decisions about urban futures. This is perhaps especially true in the Nordic context, as there is a tradition and constitutional arrangement of a strong local government. As noted by a traffic planner from a different city, “[t]here is political control, after all. And you always have to think a little first . . . is this a political priority?” (Urban planner).
Yet, the sometimes-dismissive approach to pilots is only one side of the story. In the context of urban competitiveness, including branding, there is also strong demand for urban planners to implement smart city schemes (Berglund-Snodgrass & Mukhtar-Landgren, 2020; cf. Joss, 2019). Smart city projects are not rarely promoted by political leaders (Nesti, 2020, p. 33), which may require local planning administrations to collaborate with private companies and potential investors in smart city projects and pilots. One interviewee notes that It depends on how much muscles you have too. Some [companies] just force it through by saying that they will go to politicians and say that “if we don’t get this then we set up our business elsewhere.” (Project manager, from municipality)
A municipality that is actively engaged in smart city schemes is an attractive partner for tech-companies seeking new markets and an opportunity to develop and promote new services (cf. Glasmeier & Nebiolo, 2016). In relation to local autonomy, there is a realization that the companies “need” the municipality to test and roll out new technologies and services, but there is also a feeling of the municipalities needing companies to promote growth and urban attractivity.
Summary
This article applied an organizational perspective to the analysis of local autonomy. Summing up, the analysis of membership highlighted the centrality of deciding on members and network relations while—simultaneously and paradoxically—freezing the open collaboration through a decision, setting a clear hierarchy between members, tasks, and goals by using rules and monitoring procedures. Rules can be more or less flexible and may or may not be attached to sanctions. Some rules are imposed internally by the pilot management team through the organization of work packages and deliverables, and others emanate from actors outside the organization, ranging from benchmarking schemes to the calls formulated by funding agencies. On a related note, the analysis of monitoring indicated an emphasis on specific forms of knowledge and learning, including primarily evidence-based knowledge and standards. These forms of knowledge are highly prevalent (if not intrinsic to) pilots and also effect the autonomy of local actors in relation to setting goals and formulating priorities. In the analysis, this was seen as a hierarchical relation between different forms of knowledge where the pilots were shown to promote specific, and delimited, types of knowledge. This met the requirements of the company testing a particular technology—and the funding agency wanting measurable and comparable results—but it was a suboptimal fit for the urban planners seeking more contextualized knowledge on how smart mobility services could potentially affect the broader urban landscape. Yet, the analysis also showed another hierarchy permeating pilots, one which related less to learning and more to the different institutional logics permeating organizations set in-between public and private actors: Some public actors emphasized the need to relate and align pilots to broader policies and goals, often with reference to the need for a clear political mandate. This combination of adhering to political will and the primacy of evidence-based knowledge indicates how very different hierarchies interact in both re-enforcing and potentially contradictory ways.
Conclusion
The aim of this study was to contribute to debates on temporary organizations in local government by analyzing how the organizational architecture of pilots creates and affects the autonomy of local public actors. Emphasis was placed on analyzing local autonomy as a process where autonomy was continuously created through relationships and decisions on organizational configurations, which in turn opened up and closed down the possibilities for local public actors to set priorities and decide upon organizational matters.
In local government, pilots and projects are often associated with collaborative and network-based policy fields such as sustainability, social cohesion, and innovation. Pilots, as “organisations outside organisations” (Ahrne & Brunsson, 2011), partially fixate these networks into a temporary organization through a series of decisions. As indicated in previous literature on public-sector projectification, the pilots analyzed here appeared as a new form of iron cage, with a relative lack of flexibility and action space (cf. Bailey et al., 2019; Hodgson, 2004). This is paradoxical considering pilots’ strong emphasis on creativity and innovation (den Hond et al., 2019). But what does this entail in regard to broader processes of local autonomy? For this particular study, this insight begs the question, “Who builds the iron cage, and how is it built?”
Although the analysis illustrated a plethora of ways that local autonomy unfolds through the organizational architecture of pilots, two main points have been shown through the analysis: First, from the perspective of local government, it is important to recognize the multitier system and role of national funding institutes in imposing the organizational infrastructure of many pilots. Calls for funding are often narrow in terms of what is to be tested, how it is to be tested, and what type of knowledge that is sought after. The lead actor in projects is granted a certain autonomy to develop pilots within specific calls, including decisions on membership and forms of monitoring, and it makes a difference whether local public actors are project managers or project partners. We know from previous studies that EU project funding is an important push-factor for public-sector projectification (Fred, 2020; Godenhjelm et al., 2015), including in the smart city context (Lange & Knieling, 2020). We also know from other policy areas that EU projects compartmentalize, but also recompartmentalize local politics in new ways (Mukhtar-Landgren & Fred, 2018; Verschraegen et al., 2011). Seen from this perspective, the possibility for local public actors to align pilots to local goals varies (Späth & Knieling, 2020). From the perspective of local autonomy, it is important to recognize that pilots are governing tools used by national and EU-based agencies to promote and govern not only smart cities but also other local policy areas such as public-sector innovation and social exclusion. These processes can be described as attempts to encourage local public actors to “open up” administrative practices to innovators, organizations, NGOs, and companies that want to test new smart solutions, ranging from the autonomous vehicles analyzed here to social innovations to combat youth unemployment. Within the field of smart mobility, these are often strong corporate actors within sectors such as ICT, artificial intelligence (AI), and transport. This study echoes previous studies of how the governance of smart cities increases the influence of corporate actors (Joss et al., 2019; Kitchin, 2015; Söderström et al., 2014), including the opening up of administrative practices, such as urban planning, in a range of new and different ways (Späth & Knieling, 2020; cf. Cowley & Caprotti, 2019). Yet, the study also indicates how references to political mandate are used by local public actors to embed and relate pilots to local policy goals, where a lack of congruence may well influence public actors’ inclination to use the knowledge produced in pilots to generate a broader change—a tendency also noted in the projectification literature (e.g., Jensen et al., 2018; Munck af Rosenschöld, 2019). This study thus contributes to previous studies by showing how pilots reconfigure relations and hierarchies between public and private actors in new, and sometimes contradictory, ways.
Second, the iron cage of pilots is not only created through external requirements; it is in many ways intrinsic to the architectural logic of pilots. Pilots have been described as both a “technicalisation” and “instrumentalisation” of policy making (Bailey et al., 2019; cf. Joss et al., 2019), and the strong emphasis on quantification and scalability may well be mobilizing claims for context-free knowledge, which in turn have the potential for depoliticizing decision-making (Ettelt & Mays, 2019, pp. 20–21). This tendency is perhaps even amplified in the smart city context, where the incidence of ICT, data, and platforms has a strong technological bias which may, as indicated in the analysis, tend to prioritize certain types knowledge over others. In addition, smart city endeavors often adhere to standards and international benchmarking practices (Arellano-Gault et al., 2013), which circumscribes the possibilities for local public actors to influence the forms of knowledge that is to be sought after. As such, the analysis of organizational elements shows how pilots constitute both a form of multilevel governing aiming at “opening up” local administrations and a specific organizational form where evidence and scalability are emphasized. At the same time, the study also showed that there is often a will among public actors to relate pilots to local policy goals by reference to political mandate. When combined and taken together, these different aspects configure local autonomy through intersecting relationships and hierarchies beyond simple dichotomies such as inclusion/exclusion or more/less local influence.
Footnotes
Appendix
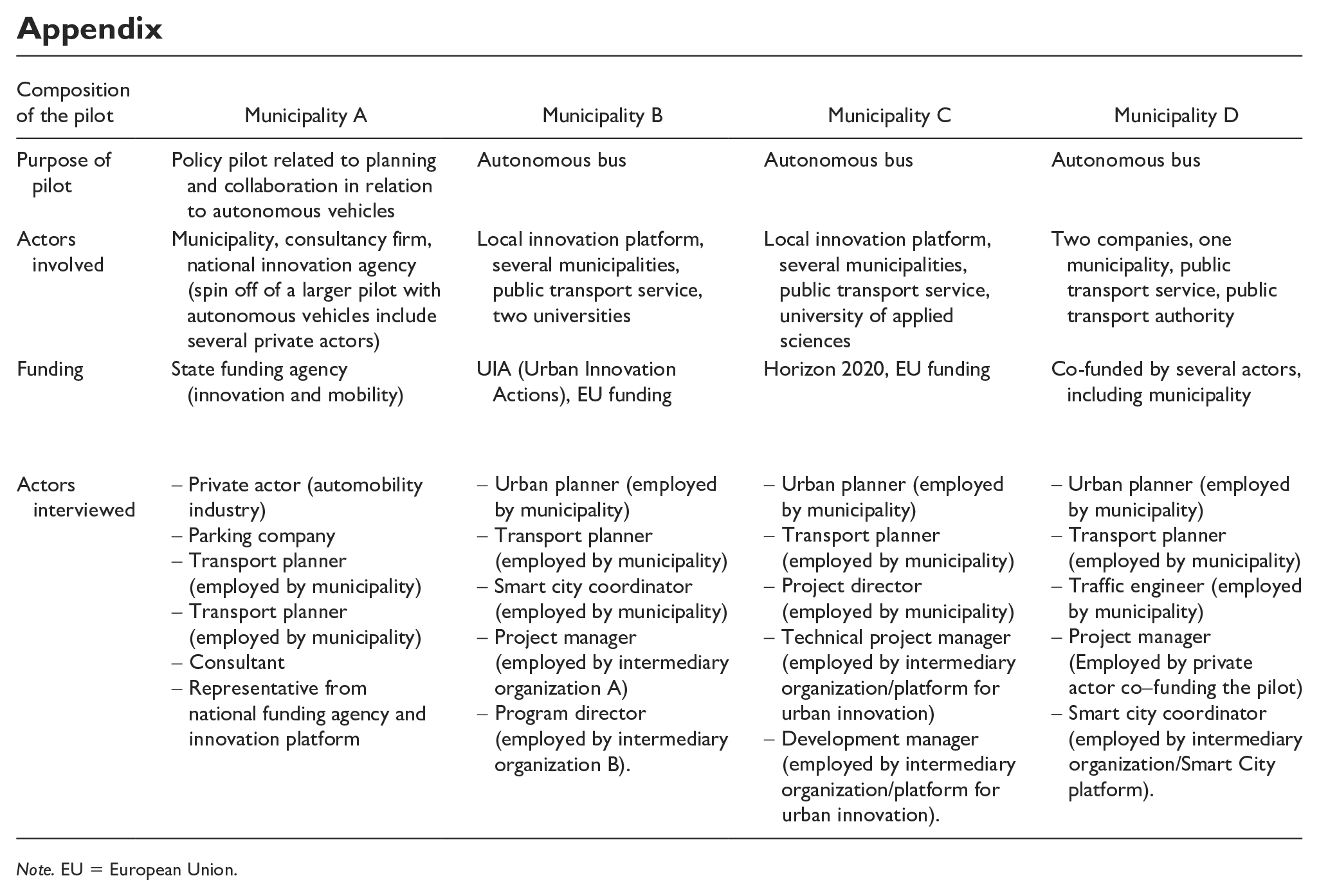
| Composition of the pilot | Municipality A | Municipality B | Municipality C | Municipality D |
|---|---|---|---|---|
| Purpose of pilot | Policy pilot related to planning and collaboration in relation to autonomous vehicles | Autonomous bus | Autonomous bus | Autonomous bus |
| Actors involved | Municipality, consultancy firm, national innovation agency (spin off of a larger pilot with autonomous vehicles include several private actors) | Local innovation platform, several municipalities, public transport service, two universities | Local innovation platform, several municipalities, public transport service, university of applied sciences | Two companies, one municipality, public transport service, public transport authority |
| Funding | State funding agency (innovation and mobility) | UIA (Urban Innovation Actions), EU funding | Horizon 2020, EU funding | Co-funded by several actors, including municipality |
| Actors interviewed | - Private actor (automobility industry) - Parking company - Transport planner (employed by municipality) - Transport planner (employed by municipality) - Consultant - Representative from national funding agency and innovation platform |
- Urban planner (employed by municipality) - Transport planner (employed by municipality) - Smart city coordinator (employed by municipality) - Project manager (employed by intermediary organization A) - Program director (employed by intermediary organization B). |
- Urban planner (employed by municipality) - Transport planner (employed by municipality) - Project director (employed by municipality) - Technical project manager (employed by intermediary organization/platform for urban innovation) - Development manager (employed by intermediary organization/platform for urban innovation). |
- Urban planner (employed by municipality) - Transport planner (employed by municipality) - Traffic engineer (employed by municipality) - Project manager (Employed by private actor co-funding the pilot) - Smart city coordinator (employed by intermediary organization/Smart City platform). |
Note. EU = European Union.
Acknowledgements
The author would like to thank Lina Berglund-Snodgrass and Alexander Paulsson for their valuable insights and cooperation during the research process. In addition, I want to thank the anonymous reviewers for their insightful and thorough reading of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research and authorship is funded by the Swedish Energy Agency and The Swedish Knowledge Centre for Public Transport (K2).